A Multitask-Aided Transfer Learning-Based Diagnostic Framework for Bearings under Inconsistent Working Conditions




Abstract
1. Introduction
- (1)
- For data preprocessing, a bispectrum-based higher-order analysis is adopted in this work; this can provide distinct patterns under inconsistent working conditions for signals associated with different health conditions. Thus, the inclusion of this signal analysis approach can make the subsequent data classification step easier.
- (2)
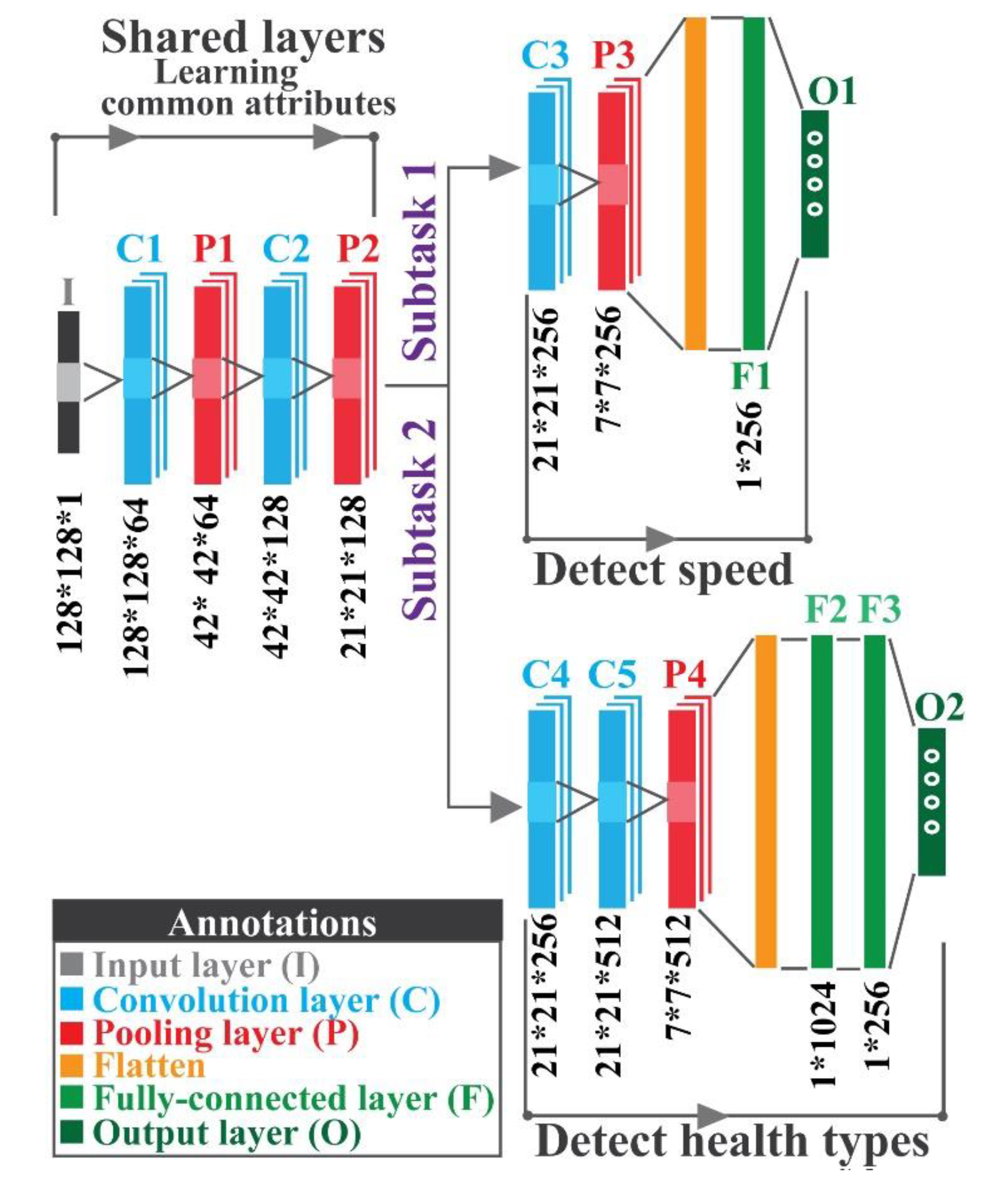
- A CNN-based MTL architecture is designed to utilize bispectra as inputs for automatic feature extraction. The end-to-end architecture can predict two types of health characteristics at the same time: (a) the speed of the rotating machine and (b) its health type. For the first time, multitasking capabilities are incorporated into the rolling bearing fault diagnostic architecture.
- (3)
- A transfer learning (TL) framework is incorporated to enhance the classification performance under multiple crack severity conditions. The TL diminishes the need for adjusting CNN architectures with different parameters for inconsistent working conditions.
2. Technical Background
2.1. Bispectrum
- (1)
- First, a discrete signal is needed, which is defined as follows:
- (2)
- The discrete coefficients of this signal can be expressed as:
- (3)
- The third-order autocorrelation coefficients can be calculated as:
- (4)
- Now, the bispectrum of can be expressed as:
- (1)
- For the symmetric probability density function of a non-zero Gaussian process, bispectrum is likely to be zeros. Thus, along with removing the Gaussian noise, non-Gaussian components are also extracted from the signals.
- (2)
- For the deterministic stationary signals with no asymmetric component, the bispectrum is zero. However, if some different scenarios come into consideration in the harmonic process, e.g., (a) non-linear interactions or (b) constant components, then the bispectrum has a non-zero value.
- (3)
- From the simple power spectral density-based analysis, the phase coupling information cannot be extracted. Due to the advantages of the identification capability for non-linear systems, the bispectrum can capture the phase coupling information.
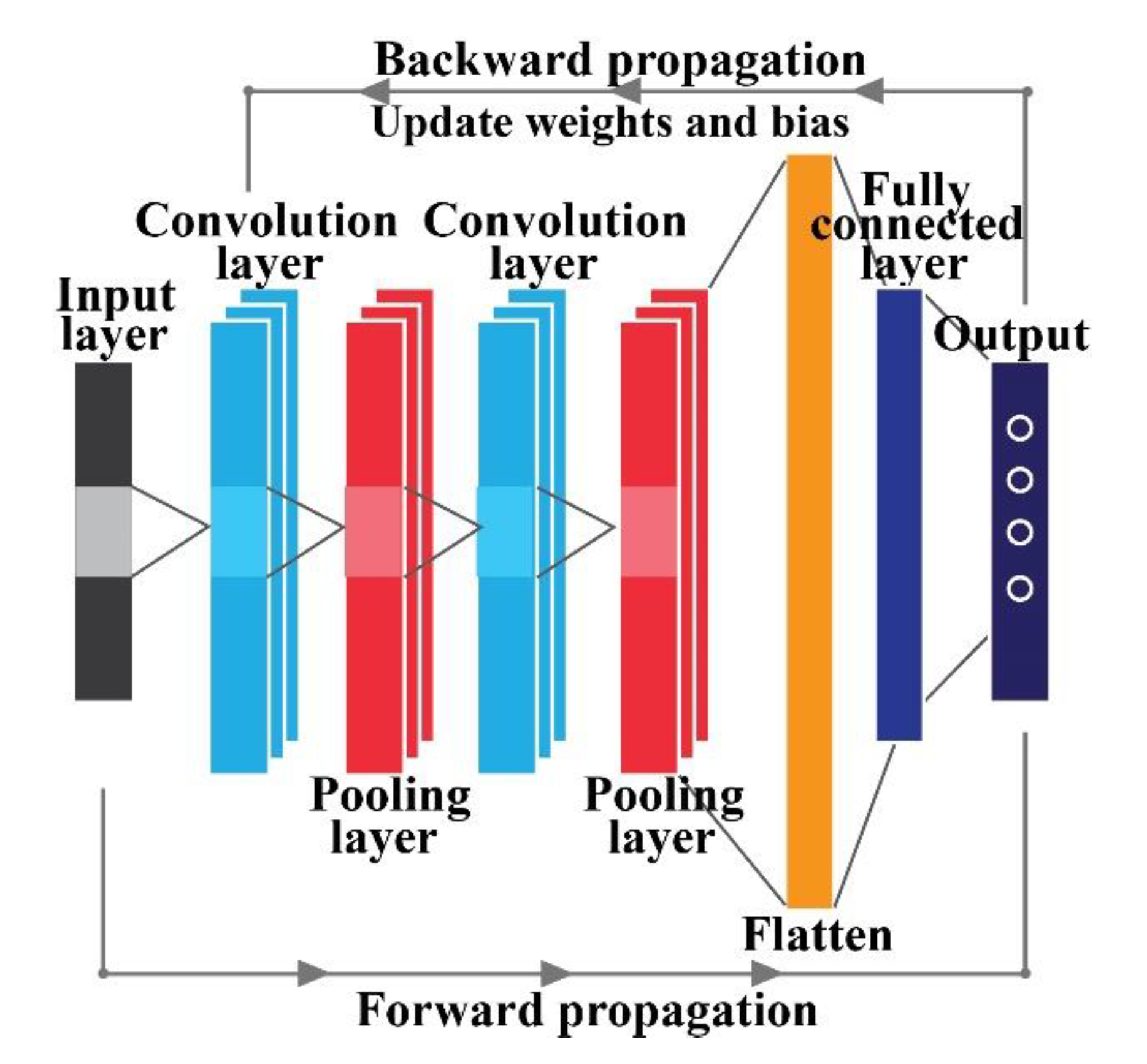
2.2. Convolutional Neural Network (CNN)
2.2.1. Forward Propagation
2.2.2. Backward Propagation
2.3. Multitask Learning with CNN
2.4. Fine-Tuning-Based Transfer Learning
3. Proposed Methodology
- (1)
- Source task: The testbed vibration signals associated with a certain crack severity under variable speed conditions are converted to a 2D bispectrum for deep learning-based analysis. The proposed MTL-CNN identifies the health type and the speed conditions of the preprocessed bispectrum of a certain crack severity. Thus, in the source task, the proposed MTL-CNN framework learns invariant spatial information for inconsistent working conditions that can optimize the developed network architecture.
- (2)
- Transfer pool: The knowledge obtained by an optimized network, also referred to as the transfer pool in the source task, is then passed to the target task. The benefits of the transfer pool are: (a) the knowledge transferred between the tasks can work as prior information to the target task, which can boost its diagnostic performance, and (b) the need to train the whole network to complete targets diminishes. Therefore, the overall learning process becomes faster if unseen data associated with a different crack size and motor speed is experienced in the target task.
- (3)
- Target task: In the target task, data associated with different crack severities (different than the source task) under variable speed conditions are passed to the diagnostic framework. Like the source task, 2D bispectra of the vibration signals are computed here, as well. Then, to identify the speed conditions and the health type, the trained network from the source task (with the parameters and learned knowledge) is utilized. Both source and target tasks have similarities in terms of the diagnostic framework design.
3.1. Bispectrum
3.2. Multitask Learning-Based CNN Architecture
3.3. Fine-Tuned Transfer Learning Framework
3.4. Performance Evaluation
4. Experimental Set Up and Performance Analysis
4.1. Case Study 1: Case Western Reserve University Dataset
4.1.1. Experimental Setup and Dataset Description
4.1.2. Performance Analysis
- (1)
- WC + MTL-CNN-TL: the input is transformed into 2D wavelet coefficient matrices and then supplied to the MTL-based deep architectures [73] to perform the TL-based analysis on the target task.
- (2)
- TFI + CNN-TL: the input is transformed into several time-frequency images (TFI) to create the multi-fusion input [43] and then passed to the MTL-CNN architecture based on the CNN model mentioned in [43]. Finally, the TL-based approach from the proposed framework is adopted to perform the final analysis.
- (3)
- (4)
- RAW + CNN-TL: the input is directly fed to the adopted CNN architecture derived from [74], and then the knowledge attained from the source task is transferred to the target task to determine for final classification accuracy.
4.2. Case Study 2: Self-Designed Test Rig with Compound Faults
4.2.1. Experimental Setup and Dataset Description
4.2.2. Performance Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yan, X.; Jia, M. A novel optimized SVM classification algorithm with multi-domain feature and its application to fault diagnosis of rolling bearing. Neurocomputing 2018, 313, 47–64. [Google Scholar] [CrossRef]
- Lei, Y.; He, Z.; Zi, Y. A new approach to intelligent fault diagnosis of rotating machinery. Expert Syst. Appl. 2008, 35, 1593–1600. [Google Scholar] [CrossRef]
- Yan, X.; Liu, Y.; Jia, M.; Zhu, Y. A multi-stage hybrid fault diagnosis approach for rolling element bearing under various working conditions. IEEE Access 2019, 7, 138426–138441. [Google Scholar] [CrossRef]
- Cui, L.; Huang, J.; Zhang, F. Quantitative and localization diagnosis of a defective ball bearing based on vertical–horizontal synchronization signal analysis. IEEE Trans. Ind. Electron. 2017, 64, 8695–8706. [Google Scholar] [CrossRef]
- Tian, J.; Ai, Y.; Fei, C.; Zhao, M.; Zhang, F.; Wang, Z. Fault diagnosis of intershaft bearings using fusion information exergy distance method. Shock Vib. 2018, 2018. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. A Motor Current Signal-Based Bearing Fault Diagnosis Using Deep Learning and Information Fusion. IEEE Trans. Instrum. Meas. 2019, 69, 3325–3333. [Google Scholar] [CrossRef]
- Mao, W.; Chen, J.; Liang, X.; Zhang, X. A new online detection approach for rolling bearing incipient fault via self-adaptive deep feature matching. IEEE Trans. Instrum. Meas. 2019, 69, 443–456. [Google Scholar] [CrossRef]
- Rai, A.; Kim, J.-M. A novel health indicator based on the Lyapunov exponent, a probabilistic self-organizing map, and the Gini-Simpson index for calculating the RUL of bearings. Measurement 2020, 108002. [Google Scholar] [CrossRef]
- Kang, M.; Kim, J.; Kim, J.M.; Tan, A.C.C.; Kim, E.Y.; Choi, B.K. Reliable fault diagnosis for low-speed bearings using individually trained support vector machines with kernel discriminative feature analysis. IEEE Trans. Power Electron. 2015, 30, 2786–2797. [Google Scholar] [CrossRef]
- Sohaib, M.; Kim, C.-H.; Kim, J.-M. A Hybrid Feature Model and Deep-Learning-Based Bearing Fault Diagnosis. Sensors 2017, 17, 2876. [Google Scholar] [CrossRef]
- Rai, A.; Upadhyay, S.H. A review on signal processing techniques utilized in the fault diagnosis of rolling element bearings. Tribol. Int. 2016, 96, 289–306. [Google Scholar] [CrossRef]
- Hasan, M.J.; Sohaib, M.; Kim, J.-M. 1D CNN-Based Transfer Learning Model for Bearing Fault Diagnosis Under Variable Working Conditions; Springer: Berlin/Heidelberg, Germany, 2019; Volume 888, ISBN 9783030033019. [Google Scholar]
- Hasan, M.J.; Kim, J.-M. Bearing Fault Diagnosis under Variable Rotational Speeds Using Stockwell Transform-Based Vibration Imaging and Transfer Learning. Appl. Sci. 2018, 8, 2357. [Google Scholar] [CrossRef]
- Hasan, M.J.; Islam, M.M.; Kim, J.-M. Multi-sensor fusion-based time-frequency imaging and transfer learning for spherical tank crack diagnosis under variable pressure conditions. Measurement 2021, 168, 108478. [Google Scholar] [CrossRef]
- Khan, S.A.; Kim, J.-M. Rotational speed invariant fault diagnosis in bearings using vibration signal imaging and local binary patterns. J. Acoust. Soc. Am. 2016, 139, EL100–EL104. [Google Scholar] [CrossRef]
- Hasan, M.J.; Islam, M.M.M.; Kim, J.M. Acoustic spectral imaging and transfer learning for reliable bearing fault diagnosis under variable speed conditions. Meas. J. Int. Meas. Confed. 2019, 138, 620–631. [Google Scholar] [CrossRef]
- Islam, M.M.M.; Myon, J. Time–frequency envelope analysis-based sub-band selection and probabilistic support vector machines for multi-fault diagnosis of low-speed bearings. J. Ambient Intell. Humaniz. Comput. 2017, 1–16. [Google Scholar] [CrossRef]
- Hasan, M.; Kim, J.-M. Fault Detection of a Spherical Tank Using a Genetic Algorithm-Based Hybrid Feature Pool and k-Nearest Neighbor Algorithm. Energies 2019, 12, 991. [Google Scholar] [CrossRef]
- Hasan, M.J.; Kim, J.; Kim, C.H.; Kim, J.-M. Health State Classification of a Spherical Tank Using a Hybrid Bag of Features and K-Nearest Neighbor. Appl. Sci. 2020, 10, 2525. [Google Scholar] [CrossRef]
- Tra, V.; Kim, J.; Khan, S.A.; Kim, J.-M. Bearing Fault Diagnosis under Variable Speed Using Convolutional Neural Networks and the Stochastic Diagonal Levenberg-Marquardt Algorithm. Sensors 2017, 17, 2834. [Google Scholar] [CrossRef]
- Qu, J.; Zhang, Z.; Gong, T. A novel intelligent method for mechanical fault diagnosis based on dual-tree complex wavelet packet transform and multiple classifier fusion. Neurocomputing 2016, 171, 837–853. [Google Scholar] [CrossRef]
- Chen, G.; Liu, F.; Huang, W. Sparse discriminant manifold projections for bearing fault diagnosis. J. Sound Vib. 2017, 399, 330–344. [Google Scholar] [CrossRef]
- Duong, B.P.; Kim, J.-M. Non-mutually exclusive deep neural network classifier for combined modes of bearing fault diagnosis. Sensors 2018, 18, 1129. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, H.N.; Kim, J.; Kim, J.-M. Optimal sub-band analysis based on the envelope power Spectrum for effective fault detection in bearing under variable, low speeds. Sensors 2018, 18, 1389. [Google Scholar] [CrossRef] [PubMed]
- Zheng, H.; Wang, R.; Yang, Y.; Li, Y.; Xu, M. Intelligent fault identification based on multisource domain generalization towards actual diagnosis scenario. IEEE Trans. Ind. Electron. 2019, 67, 1293–1304. [Google Scholar] [CrossRef]
- Oh, H.; Jung, J.H.; Jeon, B.C.; Youn, B.D. Scalable and unsupervised feature engineering using vibration-imaging and deep learning for rotor system diagnosis. IEEE Trans. Ind. Electron. 2017, 65, 3539–3549. [Google Scholar] [CrossRef]
- Zheng, J.; Cheng, J.; Yang, Y.; Luo, S. A rolling bearing fault diagnosis method based on multi-scale fuzzy entropy and variable predictive model-based class discrimination. Mech. Mach. Theory 2014, 78, 187–200. [Google Scholar] [CrossRef]
- Ali, J.B.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of empirical mode decomposition and artificial neural network for automatic bearing fault diagnosis based on vibration signals. Appl. Acoust. 2015, 89, 16–27. [Google Scholar]
- Zhao, L.-Y.; Wang, L.; Yan, R.-Q. Rolling bearing fault diagnosis based on wavelet packet decomposition and multi-scale permutation entropy. Entropy 2015, 17, 6447–6461. [Google Scholar] [CrossRef]
- Shao, S.-Y.; Sun, W.-J.; Yan, R.-Q.; Wang, P.; Gao, R.X. A deep learning approach for fault diagnosis of induction motors in manufacturing. Chin. J. Mech. Eng. 2017, 30, 1347–1356. [Google Scholar] [CrossRef]
- Wang, X.; Huang, J.; Ren, G.; Wang, D. A hydraulic fault diagnosis method based on sliding-window spectrum feature and deep belief network. J. Vibroeng. 2017, 19, 4272–4284. [Google Scholar]
- Wang, P.; Yan, R.; Gao, R.X. Virtualization and deep recognition for system fault classification. J. Manuf. Syst. 2017, 44, 310–316. [Google Scholar] [CrossRef]
- Zhang, Y.; Xing, K.; Bai, R.; Sun, D.; Meng, Z. An enhanced convolutional neural network for bearing fault diagnosis based on time–frequency image. Measurement 2020, 107667. [Google Scholar] [CrossRef]
- Wang, H.; Li, S.; Song, L.; Cui, L.; Wang, P. An enhanced intelligent diagnosis method based on multi-sensor image fusion via improved deep learning network. IEEE Trans. Instrum. Meas. 2019, 69, 2648–2657. [Google Scholar] [CrossRef]
- Huang, R.; Liao, Y.; Zhang, S.; Li, W. Deep decoupling convolutional neural network for intelligent compound fault diagnosis. IEEE Access 2018, 7, 1848–1858. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A new deep learning model for fault diagnosis with good anti-noise and domain adaptation ability on raw vibration signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef] [PubMed]
- Kang, M.; Islam, M.R.; Kim, J.; Kim, J.M.; Pecht, M. A Hybrid Feature Selection Scheme for Reducing Diagnostic Performance Deterioration Caused by Outliers in Data-Driven Diagnostics. IEEE Trans. Ind. Electron. 2016, 63, 3299–3310. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Lu, N.; Xing, S. Deep normalized convolutional neural network for imbalanced fault classification of machinery and its understanding via visualization. Mech. Syst. Signal Process. 2018, 110, 349–367. [Google Scholar] [CrossRef]
- Ince, T.; Kiranyaz, S.; Eren, L.; Askar, M.; Gabbouj, M. Real-Time Motor Fault Detection by 1-D Convolutional Neural Networks. IEEE Trans. Ind. Electron. 2016, 63, 7067–7075. [Google Scholar] [CrossRef]
- Saidi, L.; Ali, J.B.; Fnaiech, F. Application of higher order spectral features and support vector machines for bearing faults classification. ISA Trans. 2015, 54, 193–206. [Google Scholar] [CrossRef]
- Dobrescu, A.; Giuffrida, M.V.; Tsaftaris, S.A. Doing More with Less: A Multitask Deep Learning Approach in Plant Phenotyping. Front. Plant Sci. 2020, 11. [Google Scholar] [CrossRef]
- Sohaib, M.; Kim, J.-M. Fault diagnosis of rotary machine bearings under inconsistent working conditions. IEEE Trans. Instrum. Meas. 2019, 69, 3334–3347. [Google Scholar] [CrossRef]
- Wang, J.; Mo, Z.; Zhang, H.; Miao, Q. A deep learning method for bearing fault diagnosis based on time-frequency image. IEEE Access 2019, 7, 42373–42383. [Google Scholar] [CrossRef]
- Nikias, C.L.; Raghuveer, M.R. Bispectrum estimation: A digital signal processing framework. Proc. IEEE 1987, 75, 869–891. [Google Scholar] [CrossRef]
- Jiang, Y.; Tang, C.; Zhang, X.; Jiao, W.; Li, G.; Huang, T. A Novel Rolling Bearing Defect Detection Method Based on Bispectrum Analysis and Cloud Model-Improved EEMD. IEEE Access 2020, 8, 24323–24333. [Google Scholar] [CrossRef]
- Civera, M.; Zanotti Fragonara, L.; Surace, C. A novel approach to damage localisation based on bispectral analysis and neural network. Smart Struct. Syst. 2017, 20, 669–682. [Google Scholar]
- LeCun, Y. LeNet-5, Convolutional Neural Networks. Available online: http//yann.lecun.com/exdb/lenet (accessed on 23 August 2020).
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Dahl, G.E.; Sainath, T.N.; Hinton, G.E. Improving deep neural networks for LVCSR using rectified linear units and dropout. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 8609–8613. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. arXiv 2015, arXiv:1502.03167. [Google Scholar]
- Schmidtmann, G.; Kennedy, G.J.; Orbach, H.S.; Loffler, G. Non-linear global pooling in the discrimination of circular and non-circular shapes. Vision Res. 2012, 62, 44–56. [Google Scholar] [CrossRef]
- Wang, H.; Xu, J.; Yan, R.; Gao, R.X. A New Intelligent Bearing Fault Diagnosis Method Using SDP Representation and SE-CNN. IEEE Trans. Instrum. Meas. 2019, 69, 2377–2389. [Google Scholar] [CrossRef]
- Jing, L.; Zhao, M.; Li, P.; Xu, X. A convolutional neural network based feature learning and fault diagnosis method for the condition monitoring of gearbox. Measurement 2017, 111, 1–10. [Google Scholar] [CrossRef]
- Ma, J.; Wu, F.; Zhu, J.; Xu, D.; Kong, D. A pre-trained convolutional neural network based method for thyroid nodule diagnosis. Ultrasonics 2017, 73, 221–230. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.-M. Bearing Fault Diagnosis Using Grad-CAM and Acoustic Emission Signals. Appl. Sci. 2020, 10, 2050. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhao, H.; Wang, F. A novel deep autoencoder feature learning method for rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2017, 95, 187–204. [Google Scholar] [CrossRef]
- Cao, P.; Zhang, S.; Tang, J. Preprocessing-Free Gear Fault Diagnosis Using Small Datasets with Deep Convolutional Neural Network-Based Transfer Learning. IEEE Access 2018, 6, 26241–26253. [Google Scholar] [CrossRef]
- Zhao, M.; Kang, M.; Tang, B.; Pecht, M. Deep Residual Networks with Dynamically Weighted Wavelet Coefficients for Fault Diagnosis of Planetary Gearboxes. IEEE Trans. Ind. Electron. 2018, 65, 4290–4300. [Google Scholar] [CrossRef]
- Brownlee, J. What is the Difference Between a Batch and an Epoch in a Neural Network? In Deep Learning; Machine Learning Mastery: Vermont, VIC, Australia, 2018. [Google Scholar]
- Ruder, S. An overview of multi-task learning in deep neural networks. arXiv 2017, arXiv:1706.05098. [Google Scholar]
- Caruana, R. Multitask learning. Mach. Learn. 1997, 28, 41–75. [Google Scholar] [CrossRef]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2009, 22, 1345–1359. [Google Scholar] [CrossRef]
- Dąbrowski, M.; Michalik, T. How effective is Transfer Learning method for image classification. In Proceedings of the Position Papers of the 2017 Federated Conference on Computer Science and Information Systems, Prague, Czech Republic, 3–6 September 2017; Volume 12, pp. 3–9. [Google Scholar]
- Hoang, D.-T.; Kang, H.-J. Rolling element bearing fault diagnosis using convolutional neural network and vibration image. Cogn. Syst. Res. 2019, 53, 42–50. [Google Scholar] [CrossRef]
- Dubey, A.K.; Jain, V. Comparative Study of Convolution Neural Network’s ReLu and Leaky-ReLu Activation Functions. In Applications of Computing, Automation and Wireless Systems in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2019; pp. 873–880. [Google Scholar]
- Kolar, D.; Lisjak, D.; Pająk, M.; Pavković, D. Fault Diagnosis of Rotary Machines Using Deep Convolutional Neural Network with Wide Three Axis Vibration Signal Input. Sensors 2020, 20, 4017. [Google Scholar] [CrossRef]
- Luque, A.; Carrasco, A.; Martín, A.; de las Heras, A. The impact of class imbalance in classification performance metrics based on the binary confusion matrix. Pattern Recognit. 2019, 91, 216–231. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, E. A probabilistic interpretation of precision, recall and F-score, with implication for evaluation. In Proceedings of the European Conference on Information Retrieval; Springer: Berlin/Heidelberg, Germany, 2005; pp. 345–359. [Google Scholar]
- van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]
- Browne, M.W. Cross-validation methods. J. Math. Psychol. 2000, 44, 108–132. [Google Scholar] [CrossRef]
- Case Western Reserve University. Bearing Data Center Website. 2017, pp. 2–3. Available online: https://csegroups.case.edu/bearingdatacenter/pages/welcome-case-western-reserve-university-bearing-data-center-website (accessed on 13 August 2020).
- Amar, M.; Gondal, I.; Wilson, C. Vibration spectrum imaging: A novel bearing fault classification approach. IEEE Trans. Ind. Electron. 2015, 62, 494–502. [Google Scholar] [CrossRef]
- Guo, S.; Zhang, B.; Yang, T.; Lyu, D.; Gao, W. Multitask Convolutional Neural Network with Information Fusion for Bearing Fault Diagnosis and Localization. IEEE Trans. Ind. Electron. 2019, 67, 8005–8015. [Google Scholar] [CrossRef]
- Zhang, R.; Tao, H.; Wu, L.; Guan, Y. Transfer Learning with Neural Networks for Bearing Fault Diagnosis in Changing Working Conditions. IEEE Access 2017, 5, 14347–14357. [Google Scholar] [CrossRef]
- Piezotronic, P. Sensor Details. Available online: http://www.pcb.com/contentstore/mktgContent/IMI_Downloads/IM%0AI-RouteBased_LowRes.pdf (accessed on 13 August 2020).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subtask 1 | Subtask 2 | ||||
|---|---|---|---|---|---|
| Layers | Trainable | Transfer | Layers | Trainable | Transfer |
| C1 | Yes | Yes | C4 | Yes | Yes |
| P1 | No | Yes | C5 | Yes | Yes |
| C2 | Yes | Yes | P4 | No | Yes |
| P2 | No | Yes | F2 | Yes | No |
| C3 | Yes | Yes | F3 | Yes | No |
| P3 | No | Yes | O2 | Output | No |
| F1 | Yes | No | |||
| O1 | Output | No | |||
| Health Type | Shaft Speed (RPM) | Load | Crack Size | |
|---|---|---|---|---|
| Length (in) | ||||
| Dataset 1 | NT | 1797, 1772, 1750 | 0, 1, 2 | - |
| IRT | 0.007 | |||
| ORT | 0.007 | |||
| RT | 0.007 | |||
| Dataset 2 | NT | 1797, 1772, 1750 | 0, 1, 2 | - |
| IRT | 0.014 | |||
| ORT | 0.014 | |||
| RT | 0.014 | |||
| Dataset 3 | NT | 1797, 1772, 1750 | 0, 1, 2 | - |
| IRT | 0.021 | |||
| ORT | 0.021 | |||
| RT | 0.021 |
| Source task details | Dataset | Train (90%) | Test (10%) | |
| Training (80%) | Validation (20%) | |||
| 1 | 1944 samples | 216 samples | 240 samples | |
| 2 | 1944 samples | 216 samples | 240 samples | |
| 3 | 1944 samples | 216 samples | 240 samples | |
| Target task details | Train (15%) | Test (85%) | ||
| Training (90%) | Validation (10%) | |||
| 1 | 324 samples | 36 samples | 2040 samples | |
| 2 | 324 samples | 36 samples | 2040 samples | |
| 3 | 324 samples | 36 samples | 2040 samples | |
| Exp. | Source Task | Target Task | Subtasks | Conditions | F1 (%) | AS (%) |
|---|---|---|---|---|---|---|
| 1 | Dataset 1 | Dataset 2, 3 | A. Speed detection | 1797 RPM | 100 | 100 |
| 1772 RPM | 100 | |||||
| 1750 RPM | 100 | |||||
| B. Health type detection | NT | 100 | 100 | |||
| IRT | 100 | |||||
| ORT | 100 | |||||
| RT | 100 | |||||
| 2 | Dataset 2 | Dataset 3, 1 | A. Speed detection | 1797 RPM | 100 | 100 |
| 1772 RPM | 100 | |||||
| 1750 RPM | 100 | |||||
| B. Health type detection | NT | 100 | 100 | |||
| IRT | 100 | |||||
| ORT | 100 | |||||
| RT | 100 | |||||
| 3 | Dataset 3 | Dataset 1, 2 | A. Speed detection | 1797 RPM | 100 | 99.9 |
| 1772 RPM | 99.9 | |||||
| 1750 RPM | 100 | |||||
| B. Health type detection | NT | 100 | 100 | |||
| IRT | 100 | |||||
| ORT | 100 | |||||
| RT | 100 |
| Methods | Exp. | Subtasks | AS (%) | Improvement Shown by the Proposed Approach (%) |
|---|---|---|---|---|
| WC + MTL-CNN-TL | 1 | A | 96.2 | 3.8 |
| B | 96.3 | 3.7 | ||
| 2 | A | 96.3 | 3.7 | |
| B | 95.9 | 4.1 | ||
| 3 | A | 96.1 | 3.9 | |
| B | 96.2 | 3.8 | ||
| TFI + CNN-TL | 1 | A | 97.2 | 2.8 |
| B | 96.5 | 3.5 | ||
| 2 | A | 96.5 | 3.5 | |
| B | 96.9 | 3.1 | ||
| 3 | A | 95.2 | 4.7 | |
| B | 96.3 | 3.7 | ||
| S-transform + CNN-TL | 1 | A | 99.2 | 0.8 |
| B | 98.1 | 1.9 | ||
| 2 | A | 99.5 | 0.5 | |
| B | 99.1 | 0.9 | ||
| 3 | A | 99.0 | 0.9 | |
| B | 98.7 | 1.3 | ||
| RAW + CNN-TL | 1 | A | 92.1 | 7.9 |
| B | 92.3 | 7.7 | ||
| 2 | A | 92.0 | 8.0 | |
| B | 91.9 | 8.1 | ||
| 3 | A | 90.9 | 9.0 | |
| B | 91.2 | 8.8 | ||
| Proposed | 1 | A | 100.0 | - |
| B | 100.0 | - | ||
| 2 | A | 100.0 | - | |
| B | 100.0 | - | ||
| 3 | A | 99.9 | - | |
| B | 100.0 | - |
| Health Type | Shaft Speed (RPM) | Crack Size | |
|---|---|---|---|
| Length (mm) | |||
| Dataset 1 | NT | 300, 400 | - |
| IRT | 6 | ||
| RT | 6 | ||
| IART | 6 | ||
| Dataset 2 | NT | 300, 400 | - |
| IRT | 12 | ||
| RT | 12 | ||
| IART | 12 |
| Source task details | Dataset | Train (90%) | Test (10%) | |
| Training (80%) | Validation (20%) | |||
| 1 | 1152 samples | 288 samples | 160 samples | |
| 2 | 1152 samples | 288 samples | 160 samples | |
| Target task details | Train (15%) | Test (85%) | ||
| Training (90%) | Validation (10%) | |||
| 1 | 216 samples | 24 samples | 1360 samples | |
| 2 | 216 samples | 24 samples | 1360 samples | |
| Exp. | Source Task | Target Task | Subtasks | Conditions | F1 (%) | AS (%) |
|---|---|---|---|---|---|---|
| 1 | Dataset 1 | Dataset 2 | A. Speed detection | 300 RPM | 98.2 | 98.2 |
| 400 RPM | 98.1 | |||||
| B. Health type detection | NT | 95.2 | 94.8 | |||
| IRT | 93.4 | |||||
| RT | 96.1 | |||||
| IART | 94.3 | |||||
| 2 | Dataset 2 | Dataset 1 | A. Speed detection | 300 RPM | 98.4 | 98.3 |
| 400 RPM | 98.2 | |||||
| B. Health type detection | NT | 96.1 | 95.1 | |||
| IRT | 95.2 | |||||
| RT | 95.5 | |||||
| IART | 93.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hasan, M.J.; Sohaib, M.; Kim, J.-M. A Multitask-Aided Transfer Learning-Based Diagnostic Framework for Bearings under Inconsistent Working Conditions. Sensors 2020, 20, 7205. https://doi.org/10.3390/s20247205
Hasan MJ, Sohaib M, Kim J-M. A Multitask-Aided Transfer Learning-Based Diagnostic Framework for Bearings under Inconsistent Working Conditions. Sensors. 2020; 20(24):7205. https://doi.org/10.3390/s20247205
Chicago/Turabian StyleHasan, Md Junayed, Muhammad Sohaib, and Jong-Myon Kim. 2020. "A Multitask-Aided Transfer Learning-Based Diagnostic Framework for Bearings under Inconsistent Working Conditions" Sensors 20, no. 24: 7205. https://doi.org/10.3390/s20247205
APA StyleHasan, M. J., Sohaib, M., & Kim, J.-M. (2020). A Multitask-Aided Transfer Learning-Based Diagnostic Framework for Bearings under Inconsistent Working Conditions. Sensors, 20(24), 7205. https://doi.org/10.3390/s20247205