IceSense Proof of Concept: Calibrating an Instrumented Figure Skating Blade to Measure On-Ice Forces


 , ,
, ,
Abstract
1. Introduction
2. Methods/Results
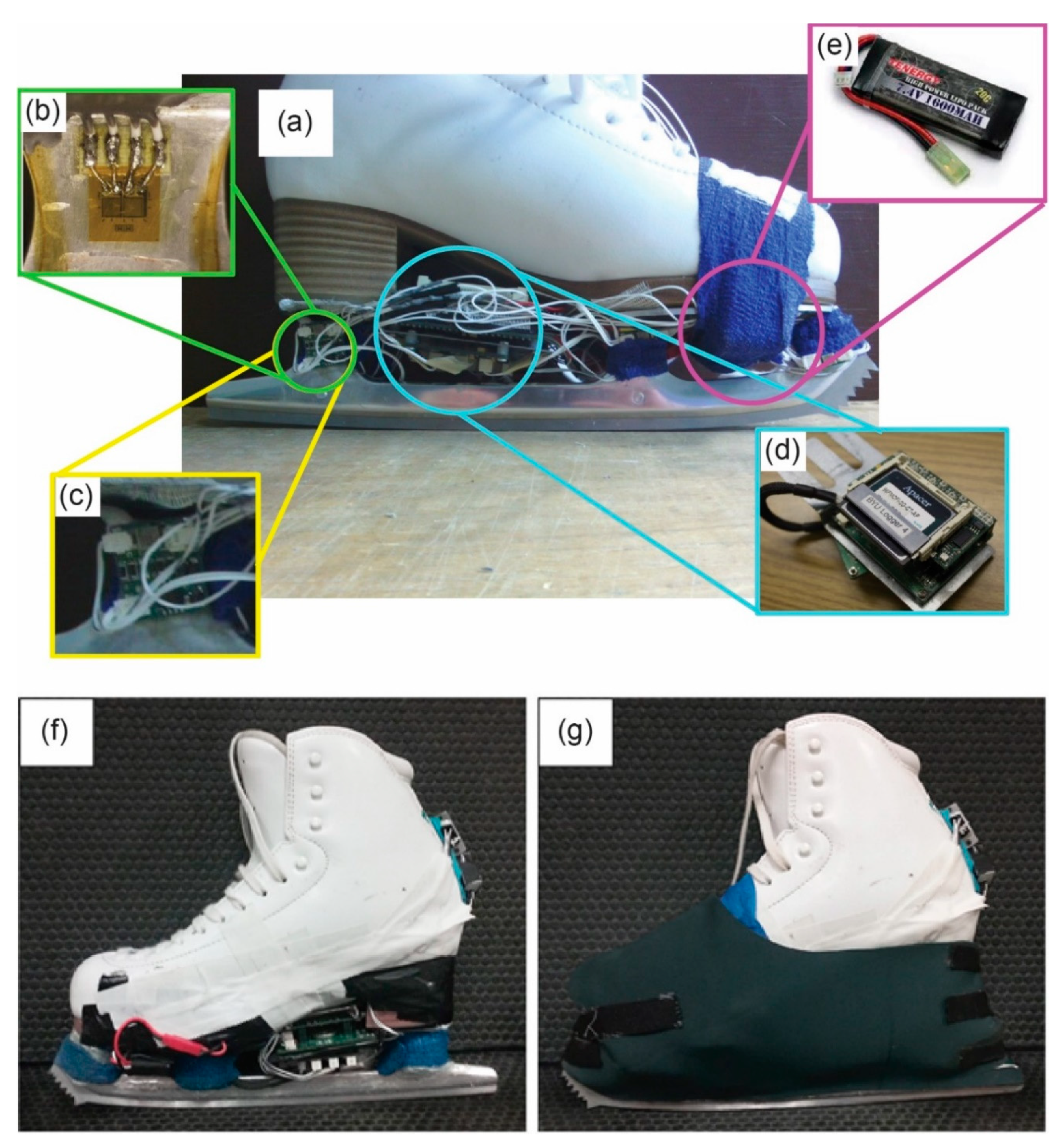
2.1. Overview
2.2. Force Plate Validation
2.2.1. Protocol
2.2.2. Data Analysis
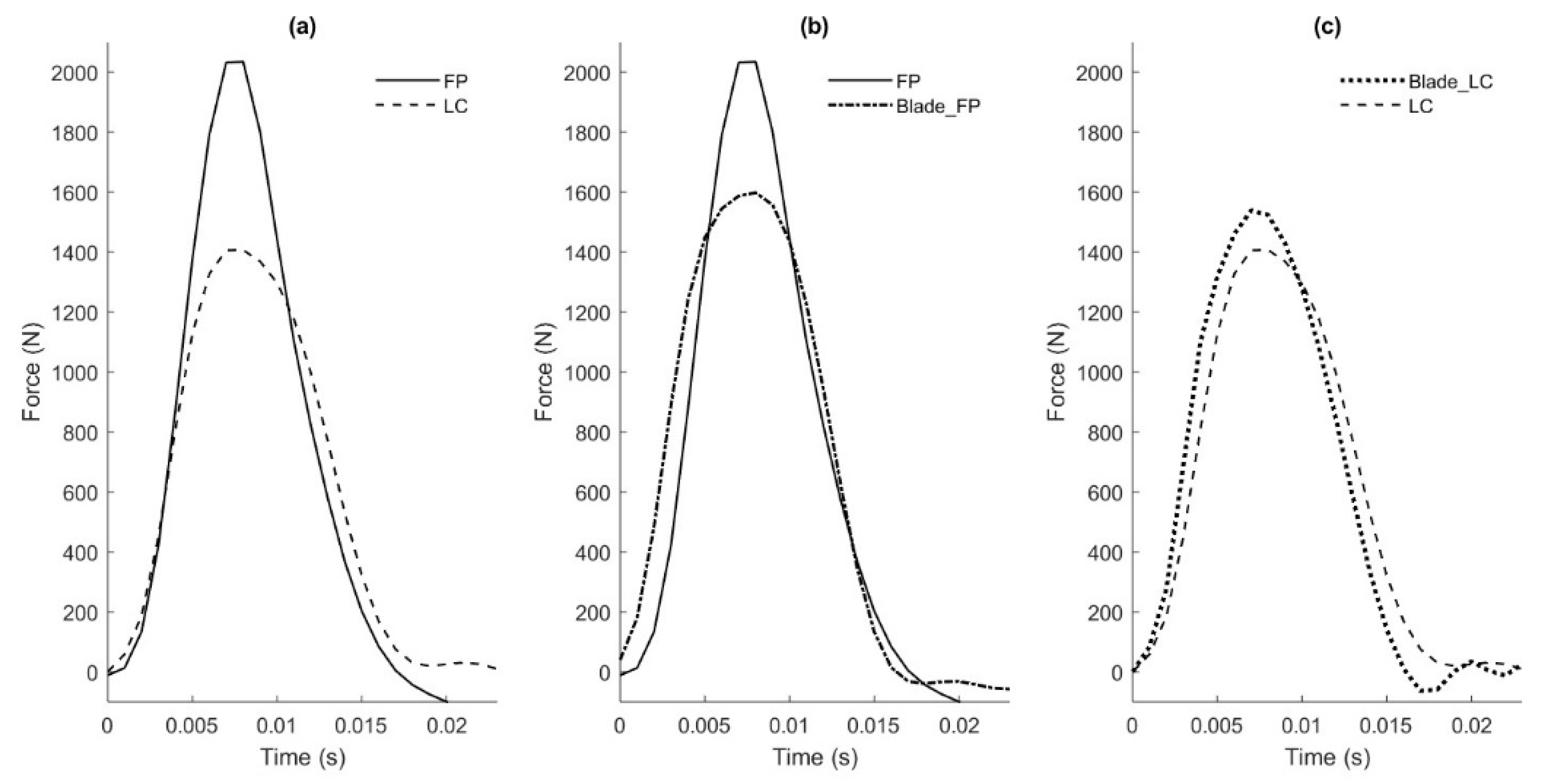
2.2.3. Results of Force Plate Validation
2.2.4. Conclusions from Force Plate Validation
2.3. Load Cell Validation
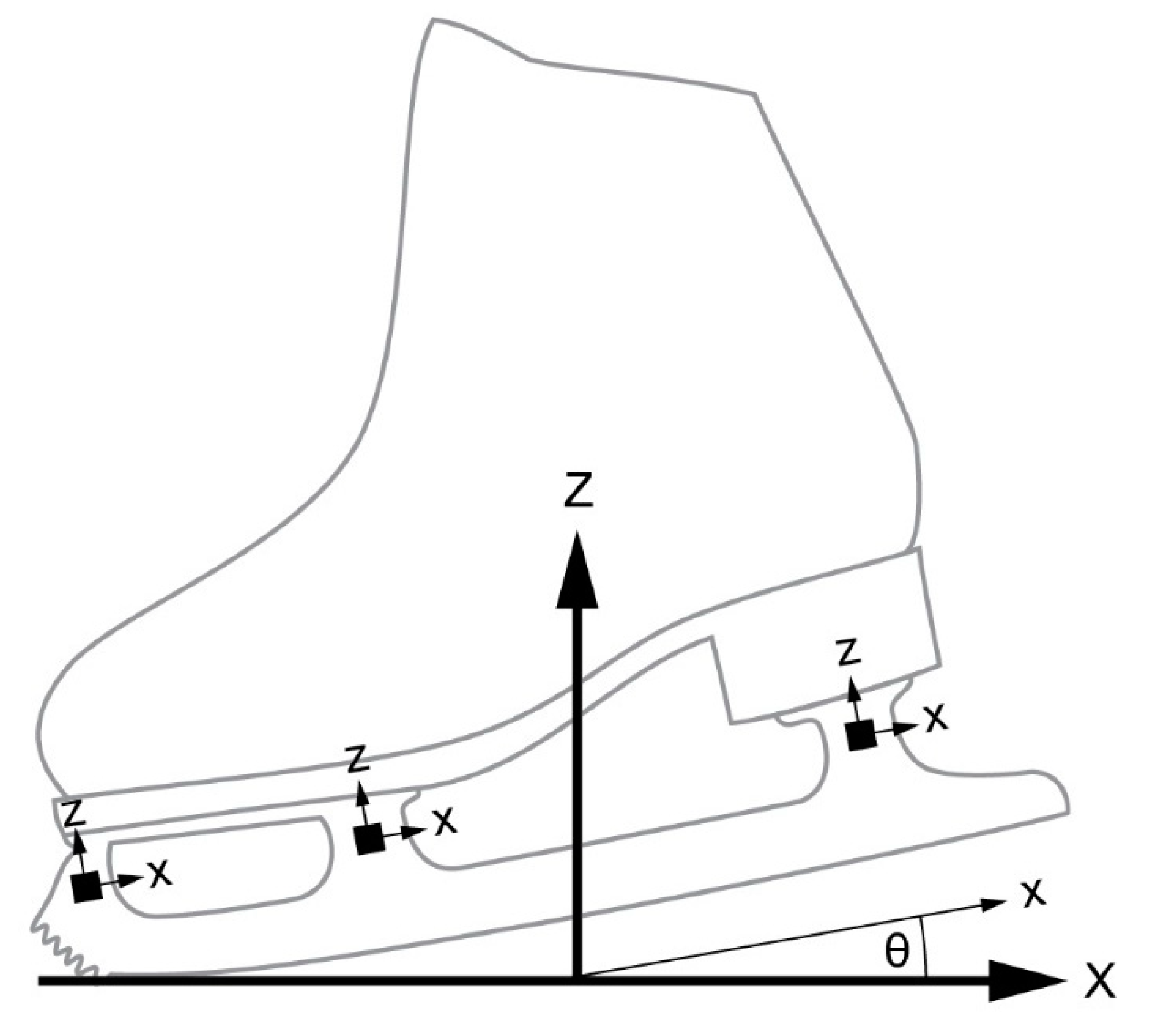
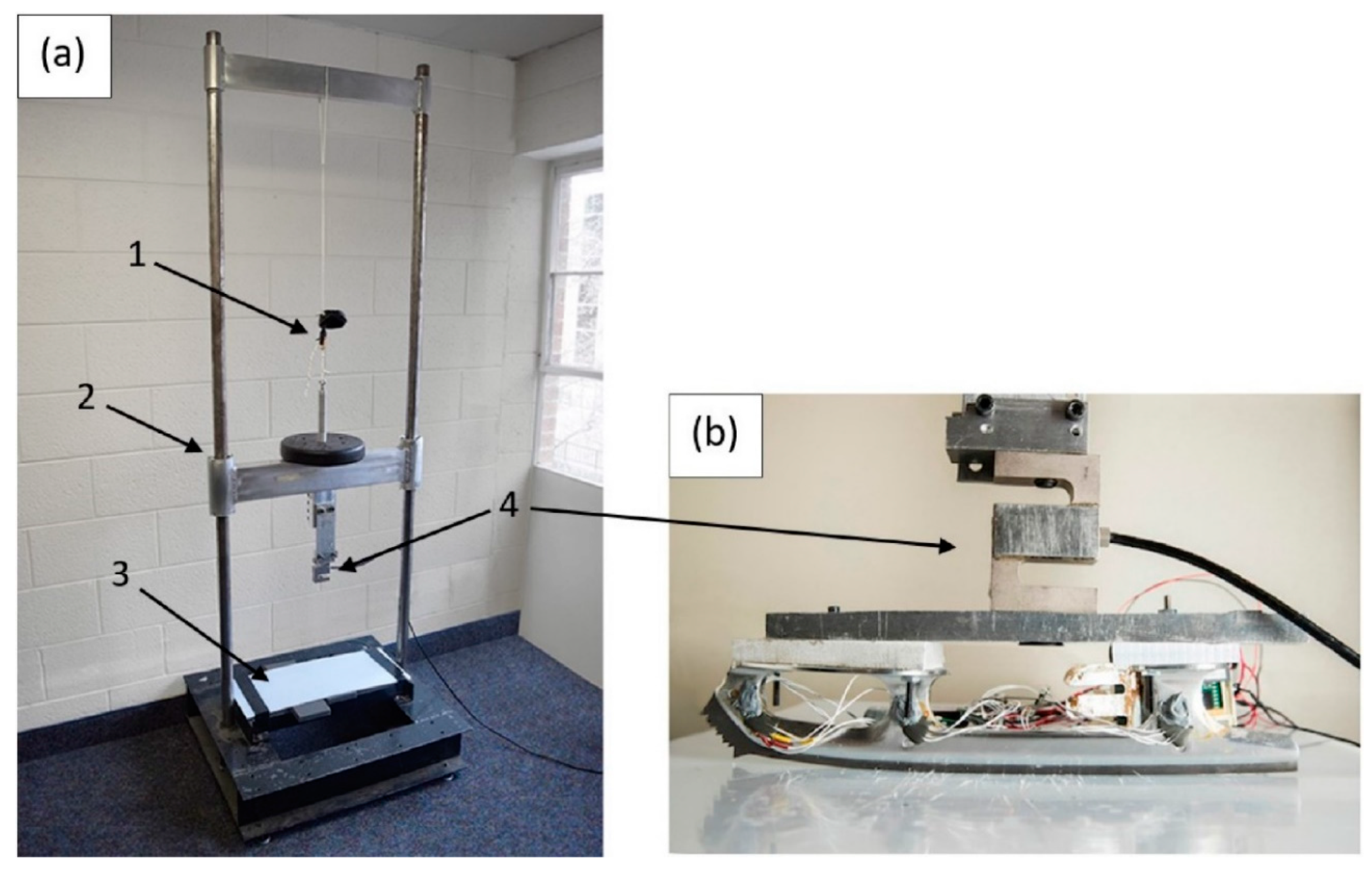
2.3.1. Setup
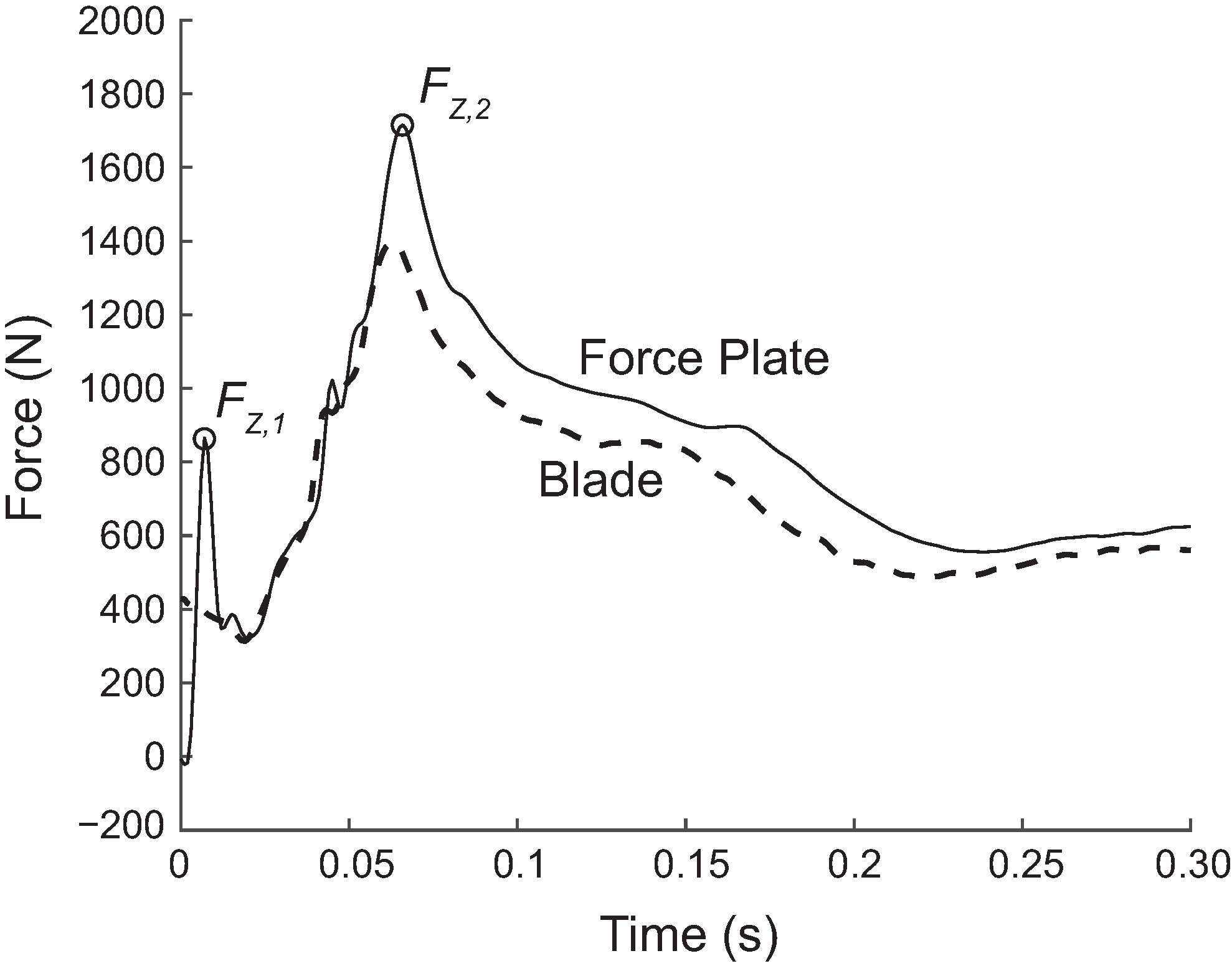
2.3.2. Load Cell vs. Force Plate
2.3.3. Protocol
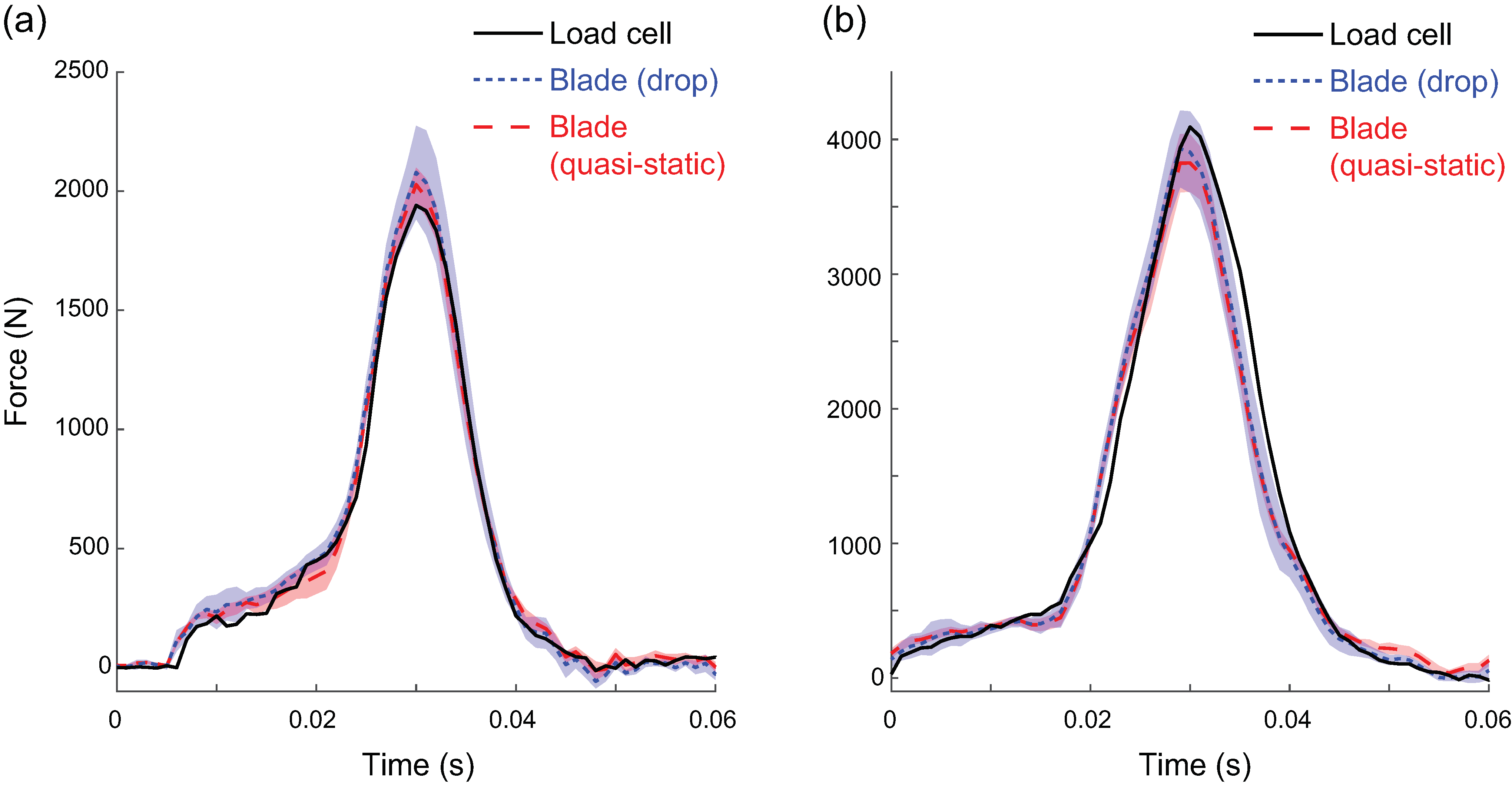
2.3.4. Data Analysis
- Quasi-static-loading force predicted using the calibration matrix derived from quasi-static loading,
- Quasi-static-loading force predicted using the calibration matrix derived from drop loading,
- Drop-loading force predicted using the calibration matrix derived from quasi-static loading, and
- Drop-loading force predicted using the calibration matrix derived from drop loading.
3. Results
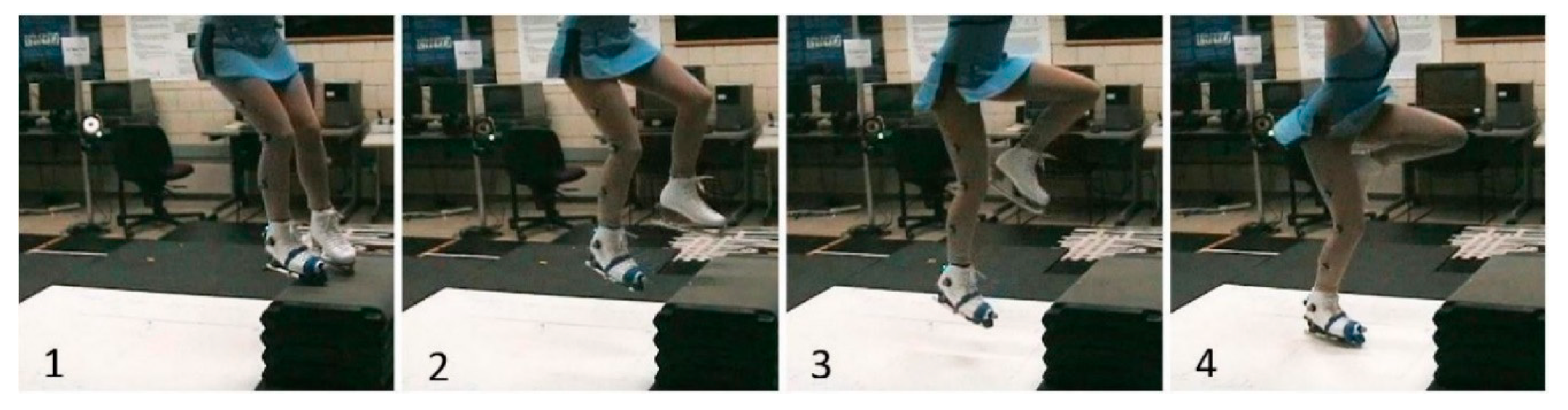
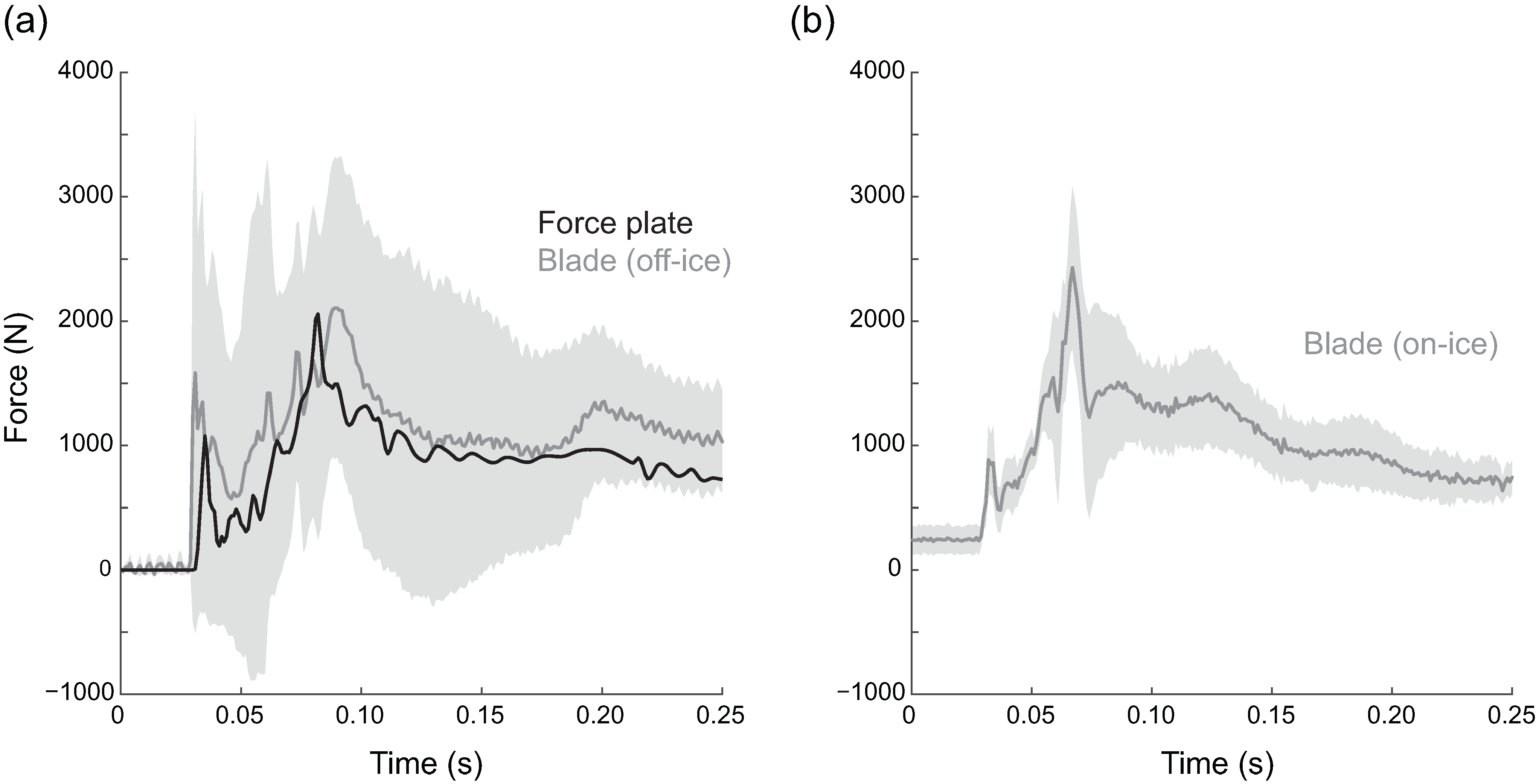
On-Ice and Off-Ice Application
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Porter, E.B. Common injuries and medical problems in singles figure skaters. Curr. Sports Med. Rep. 2013, 12, 318–320. [Google Scholar] [CrossRef] [PubMed]
- Porter, E.B.; Young, C.C.; Niedfeldt, M.W.; Gottschlich, L.M. Sport-specific injuries and medical problems of figure skaters. WMJ 2007, 106, 330–334. [Google Scholar] [PubMed]
- Caine, C.G. Figure Skating. In Epidemiology of Injury in Olympic Sports; Caine, D.J., Harmer, P.A., Schiff, M.A., Eds.; Wiley-Blackwell: West Sussex, UK, 2010; pp. 393–410. ISBN 9781405173643. [Google Scholar]
- Fortin, J.D.; Roberts, D. Competitive figure skating injuries. Pain Phys. 2003, 6, 313–318. [Google Scholar]
- Campanelli, V.; Piscitelli, F.; Verardi, L.; Maillard, P.; Sbarbati, A. Lower Extremity Overuse Conditions Affecting Figure Skaters During Daily Training. Orthop. J. Sport. Med. 2015, 3, 1–12. [Google Scholar] [CrossRef]
- Bruening, D.A.; Richards, J.G. The effects of articulated figure skates on jump landing forces. J. Appl. Biomech. 2006, 22, 285–295. [Google Scholar] [CrossRef]
- Bruening, D.A.; Richards, J.G. Individual Landing Strategies in Figure Skating Jumps. In Annual Meeting of the American Society of Biomechanics; University of Delaware: Newark, DE, USA, 2006; pp. 6–7. [Google Scholar]
- Han, J.S.; Geminiani, E.T.; Micheli, L.J. Epidemiology of Figure Skating Injuries: A Review of the Literature. Sports Health 2018, 10, 532–537. [Google Scholar] [CrossRef]
- Voloshin, A.S. Impact Propagation and its Effects on the Human Body. In Biomechanics in Sport; Zatsiorsky, V.M., Ed.; Blackwell Science Ltd: Oxford, UK, 2017; ISBN 9780470693797. [Google Scholar]
- Kho, M.E. Bone-on-Bone Forces at the Ankle and Knee in Figure Skaters during Loop Jumps: Clinical Implications; University of Waterloo: Waterloo, ON, Canada, 1996. [Google Scholar]
- Lockwood, K.; Gervais, P. Impact forces upon landing single, double, and triple revolution jumps in figure skaters. Clin. Biomech. 1997, 12, S11. [Google Scholar] [CrossRef]
- Arbour, K.M. Tibial Shock of on-Ice Figure Skating Jumps Relates to Jump Characteristics and Kinematics; University of Delaware: Newark, DE, USA, 2011. [Google Scholar]
- Acuña, S.A.; Smith, D.M.; Robinson, J.M.; Hawks, J.C.; Starbuck, P.; King, D.L.; Ridge, S.T.; Charles, S.K. Instrumented figure skating blade for measuring on-ice skating forces. Meas. Sci. Technol. 2014, 25, 125901. [Google Scholar] [CrossRef]
- Dietz, M. Development of Techniques and Procedures for Evaluating Ice Quality in Ice Rink Applications; KTH School of Industrial Engineering and Management: Stockholm, Sweden, 2016. [Google Scholar]
- Ponte, E. Shore Hardness and Soft TPEs. Available online: https://www.teknorapex.com/thermoplastic-elastomers-and-measuring-shore-hardness-chart (accessed on 27 March 2020).
- Taylor, R. Interpretation of the Correlation Coefficient: A Basic Review. J. Diagnostic Med. Sonogr. 1990, 6, 35–39. [Google Scholar] [CrossRef]
- Spiegl, O. The Effects of Different Figure Skating Boots on the Human Body during the Landing Impact—A Comparison between Two Figure SKATING boots, Edea Concerto and Graf Edmonton; Swedish School of Sport and Health Sciences: Stockholm, Sweden, 2016. [Google Scholar]
- Mizrahi, J.; Susak, Z. Analysis of parameters affecting impact force attenuation during landing in human vertical free fall. Eng. Med. 1982, 11, 141–147. [Google Scholar] [CrossRef] [PubMed]
- Dufek, J.; Bates, B. Biomechanical Factors Associated with Injury During Landing in Jump Sports. Sports Med. 1991, 12, 326–337. [Google Scholar] [CrossRef] [PubMed]
- Pećina, M.; Bojanić, I.; Dubravčić, S. Stress fractures in figure skaters. Am. J. Sports Med. 1990, 18, 277–279. [Google Scholar] [CrossRef] [PubMed]
- Oleson, C.V.; Busconi, B.D.; Baran, D.T. Bone density in competitive figure skaters. Arch. Phys. Med. Rehabil. 2002, 83, 122–128. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quasi-Static Trials | Drop Trials | |||
|---|---|---|---|---|
| QS Calibration | Drop Calibration | QS Calibration | Drop Calibration | |
| r-value | 1.0 | 1.0 | 0.99 | 0.99 |
| RMSE (N) | 13.7 ± 5.4 | 39.7 ± 9.3 | 63.6 ± 45.0 | 59.1 ± 33.3 |
| Peak Diff (N) | 14.6 ± 13.5 | 78.8 ± 14.5 | −131.3 ± 275.5 | −6.2 ± 277.6 |
| Peak Diff (%) | 0.8 ± 0.9 | 5.5 ± 0.7 | −2.9 ± 7.4 | 1.4 ± 8.2 |
| Flat | Tilt | |||
|---|---|---|---|---|
| Vertical Strain (z) | Vertical (z) and Horizontal (x) Strain | Vertical Strain (z) | Vertical (z) and Horizontal (x) Strain | |
| r-value | 0.99 | 0.99 | 0.99 | 0.99 |
| RMSE (N) | 58.0 N | 58.3 N | 45.4 N | 45.6 N |
| Avg Peak Diff (N) | 14.0 N | −18.4 N | 172.8 N | 173.8 N |
| Avg Peak Diff (%) | 1.5% | 0.9% | 9.0% | 6.6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ridge, S.; Bruening, D.; Charles, S.; Stahl, C.; Smith, D.; Reynolds, R.; Adamo, B.; Harper, B.; Adair, C.; Manwaring, P.; et al. IceSense Proof of Concept: Calibrating an Instrumented Figure Skating Blade to Measure On-Ice Forces. Sensors 2020, 20, 7082. https://doi.org/10.3390/s20247082
Ridge S, Bruening D, Charles S, Stahl C, Smith D, Reynolds R, Adamo B, Harper B, Adair C, Manwaring P, et al. IceSense Proof of Concept: Calibrating an Instrumented Figure Skating Blade to Measure On-Ice Forces. Sensors. 2020; 20(24):7082. https://doi.org/10.3390/s20247082
Chicago/Turabian StyleRidge, Sarah, Dustin Bruening, Steven Charles, Cody Stahl, Daniel Smith, Riley Reynolds, Brandon Adamo, Blake Harper, Chris Adair, Preston Manwaring, and et al. 2020. "IceSense Proof of Concept: Calibrating an Instrumented Figure Skating Blade to Measure On-Ice Forces" Sensors 20, no. 24: 7082. https://doi.org/10.3390/s20247082
APA StyleRidge, S., Bruening, D., Charles, S., Stahl, C., Smith, D., Reynolds, R., Adamo, B., Harper, B., Adair, C., Manwaring, P., & King, D. (2020). IceSense Proof of Concept: Calibrating an Instrumented Figure Skating Blade to Measure On-Ice Forces. Sensors, 20(24), 7082. https://doi.org/10.3390/s20247082