Multiplexed Passive Optical Fiber Sensor Networks for Water Level Monitoring: A Review

Abstract
1. Introduction
2. Passive Quasi-Distributed Optical Fiber Sensor Network for Water Level Monitoring
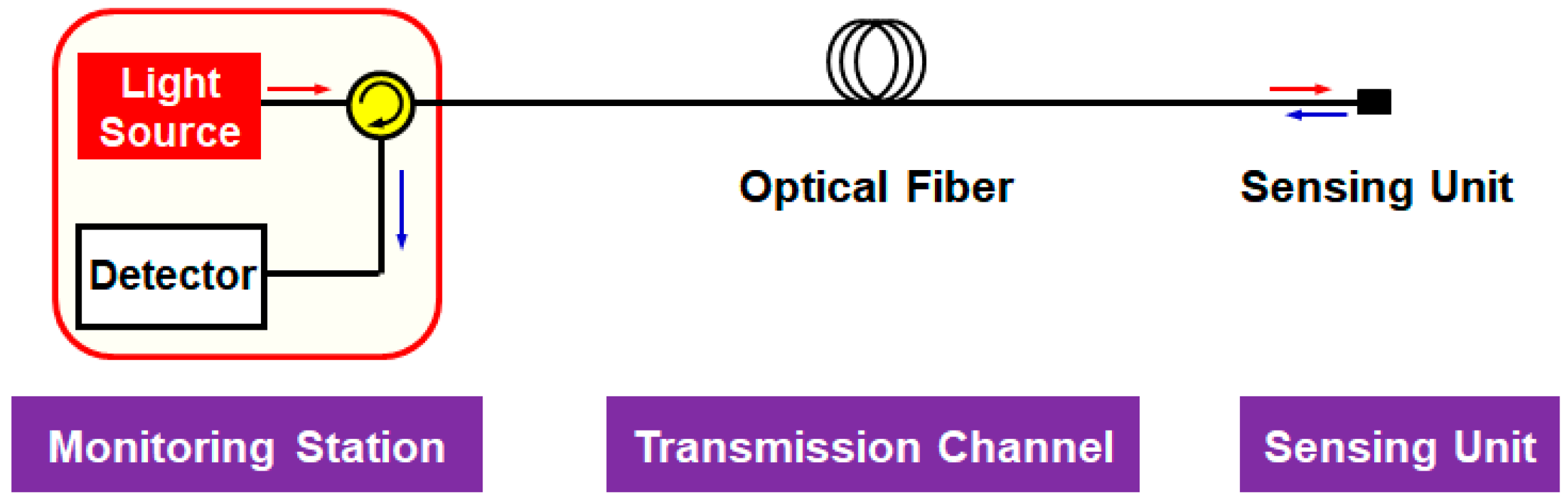
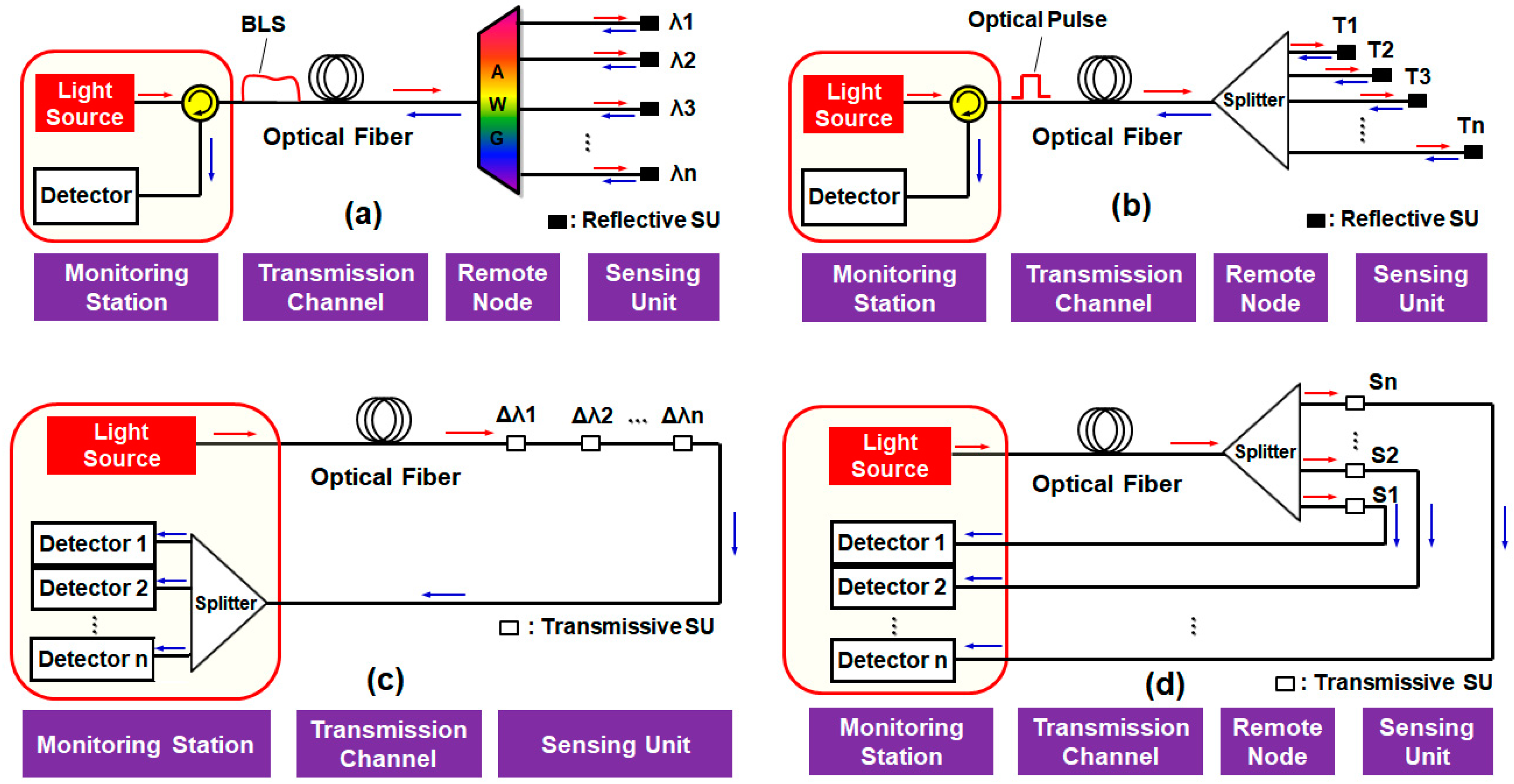
2.1. Optical Fiber Sensor Network Architectures
2.2. Multiplexing Techniques for the Quasi-Distributed Optical Fiber Sensor Network
2.3. Remote-Sensing Capability of the Quasi-Distributed Optical Fiber Sensor Network
3. Recent Development in Multiplexed Optical Fiber Sensor Networks
3.1. TDM-Based Water Level Monitoring System
3.2. SDM-Based Water Level Monitoring System
3.3. CWDM-Based Water Level Monitoring System
4. DWDM-Based Water Level Monitoring System
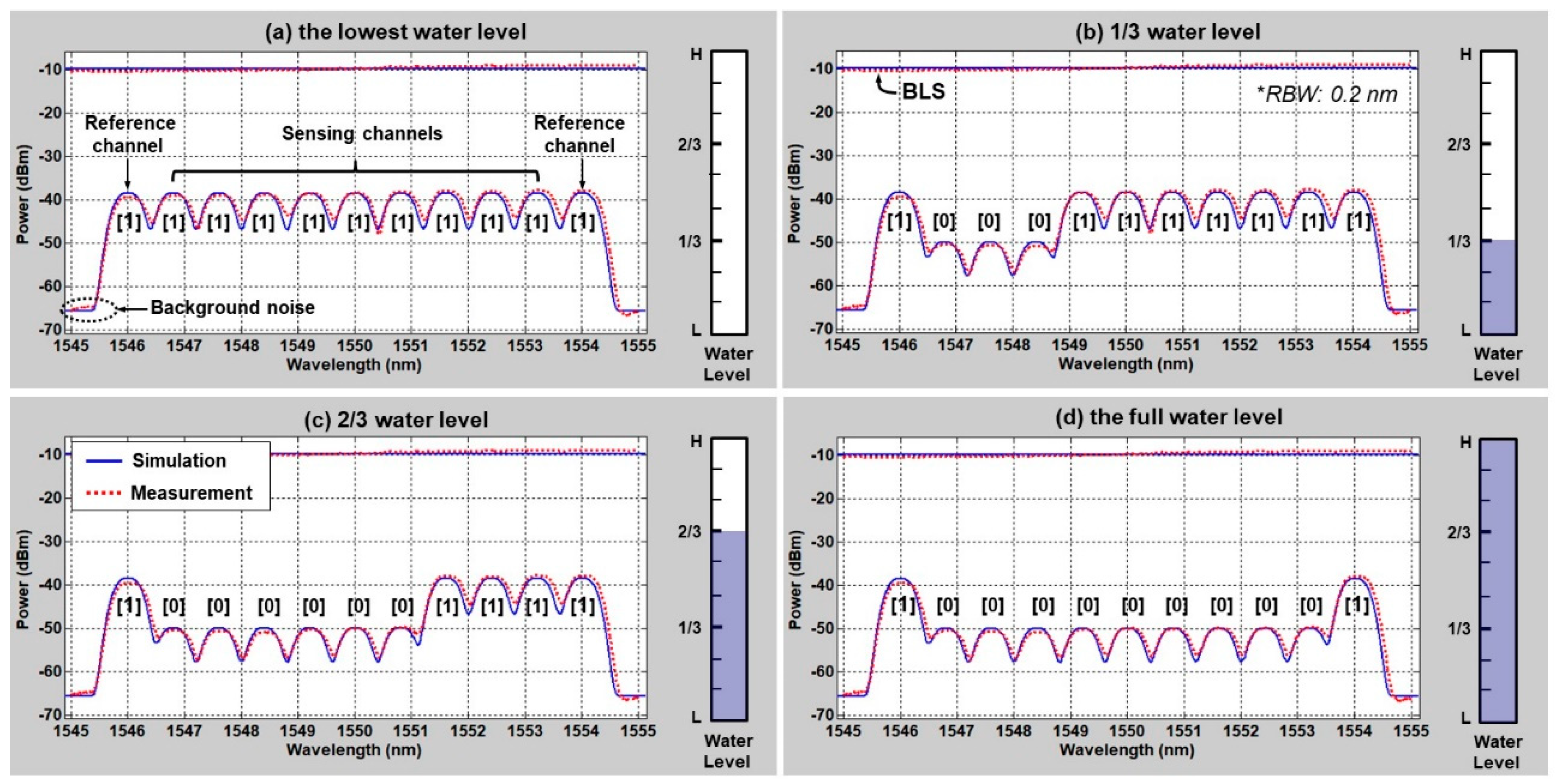
4.1. Operation Principle and Multi-Sensing Capability
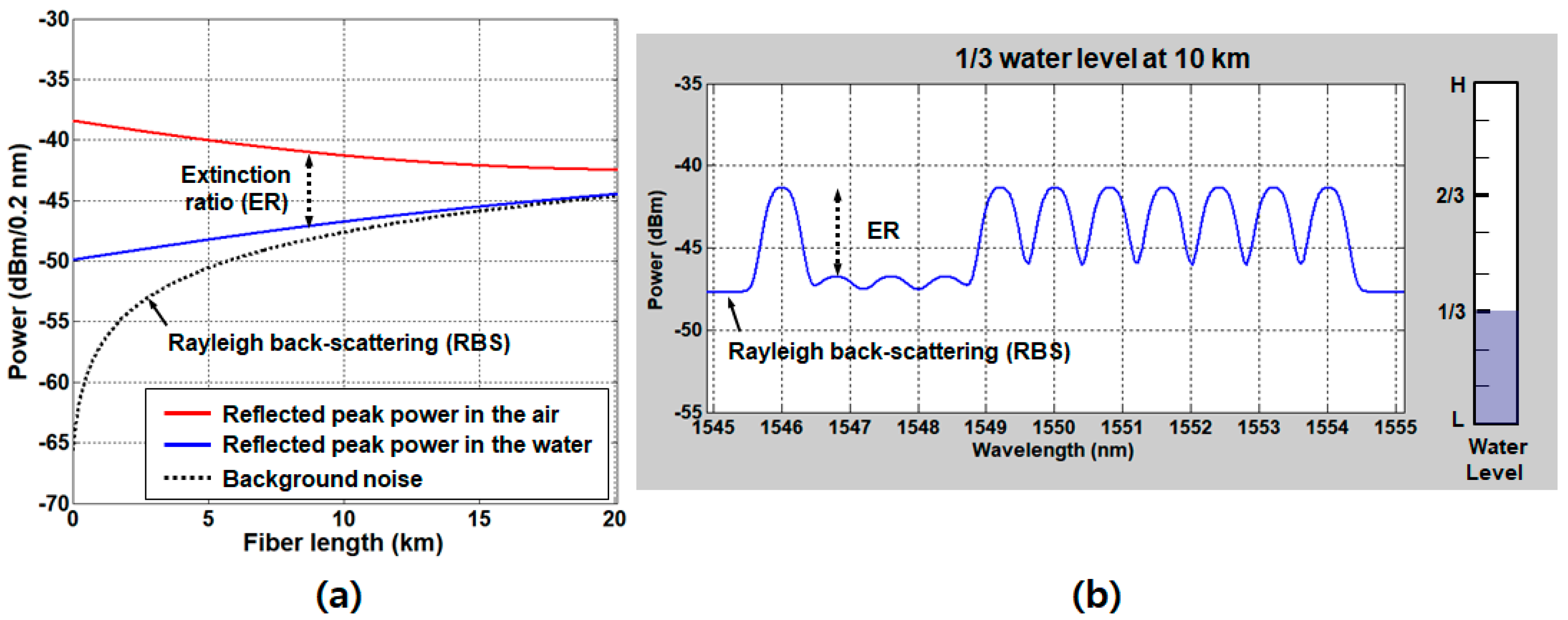
4.2. Remote-Sensing Capability
4.3. Water Level Monitoring Based on the Optical Power Measurement
5. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Park, J.; Kim, K.T.; Lee, W.H. Recent Advances in Information and Communications Technology (ICT) and Sensor Technology for Monitoring Water Quality. Water 2020, 12, 510. [Google Scholar] [CrossRef]
- Geetha, S.; Gouthami, S. Internet of things enabled real time water quality monitoring system. Smart Water 2016, 2, 1. [Google Scholar] [CrossRef]
- Loizou, K.; Koutroulis, E. Water level sensing: State of the art review and performance evaluation of a low-cost measurement system. Measurement 2016, 89, 204–214. [Google Scholar] [CrossRef]
- Chai, Q.; Luo, Y.; Ren, J.; Zhang, J.; Yang, J.; Yuan, L.; Peng, G.D. Review on fiber-optic sensing in health monitoring of power grids. Opt. Eng. 2019, 58, 072007. [Google Scholar] [CrossRef]
- Allwood, G.; Wild, G.; Hinckley, S. Optical Fiber Sensors in Physical Intrusion Detection Systems: A Review. IEEE Sens. J. 2016, 16, 5497–5509. [Google Scholar] [CrossRef]
- Barrias, A.; Casas, J.R.; Villalba, S. A Review of Distributed Optical Fiber Sensors for Civil Engineering Applications. Sensors 2016, 16, 748. [Google Scholar] [CrossRef] [PubMed]
- Loizou, K.; Koutroulis, E.; Zalikas, D.; Liontas, G. A low-cost capacitive sensor for water level monitoring in large-scale storage tanks. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015. [Google Scholar] [CrossRef]
- Jafer, E.; Ibala, C.S. Design and development of multi-node based wireless system for efficient measuring of resistive and capacitive sensors. Sens. Actuators A Phys. 2013, 189, 276–287. [Google Scholar] [CrossRef]
- Vorathin, E.; Hafizi, Z.; Ismail, N.; Loman, M. Review of high sensitivity fibre-optic pressure sensors for low pressure sensing. Opt. Laser Technol. 2020, 121, 105841. [Google Scholar] [CrossRef]
- Schenato, L.; Galtarossa, A.; Pasuto, A.; Palmieri, L. Distributed optical fiber pressure sensors. Opt. Fiber Technol. 2020, 58, 102239. [Google Scholar] [CrossRef]
- Fernandez-Vallejo, M.; Lopez-Amo, M. Optical Fiber Networks for Remote Fiber Optic Sensors. Sensors 2012, 12, 3929–3951. [Google Scholar] [CrossRef]
- Campanella, C.E.; Cuccovillo, A.; Campanella, C.; Yurt, A.; Passaro, V.M.N. Fibre Bragg Grating Based Strain Sensors: Review of Technology and Applications. Sensors 2018, 18, 3115. [Google Scholar] [CrossRef]
- Islam, M.; Ali, M.M.; Lai, M.-H.; Lim, K.-S.; Ahmad, H. Chronology of Fabry-Perot Interferometer Fiber-Optic Sensors and Their Applications: A Review. Sensors 2014, 14, 7451–7488. [Google Scholar] [CrossRef]
- De Miguel-Soto, V.; López-Amo, M. Truly remote fiber optic sensor networks. J. Phys. Photonics 2019, 1, 042002. [Google Scholar] [CrossRef]
- Zhang, P.; Feng, Q.; Li, W.; Zheng, Q.; Wang, Y. Simultaneous OTDR Dynamic Range and Spatial Resolution Enhancement by Digital LFM Pulse and Short-Time FrFT. Appl. Sci. 2019, 9, 668. [Google Scholar] [CrossRef]
- Joe, H.-E.; Yun, H.; Jo, S.-H.; Jun, M.B.G.; Min, B.-K. A review on optical fiber sensors for environmental monitoring. Int. J. Precis. Eng. Manuf. Green Technol. 2018, 5, 173–191. [Google Scholar] [CrossRef]
- Tanner, M.G.; Dyer, S.D.; Baek, B.; Hadfield, R.H.; Nam, S.W. High-resolution single-mode fiber-optic distributed Raman sensor for absolute temperature measurement using superconducting nanowire single-photon detectors. Appl. Phys. Lett. 2011, 99, 201110. [Google Scholar] [CrossRef]
- Park, J.; Bolognini, G.; Lee, D.; Kim, P.; Cho, P.; Pasquale, F.D.; Park, N. Raman-based distributed temperature sensor with simplex coding and link optimization. IEEE Photonics Technol. Lett. 2006, 18, 1879–1881. [Google Scholar] [CrossRef]
- Lu, B.; Pan, Z.; Wang, Z.; Zheng, H.; Ye, Q.; Qu, R.; Cai, H. High spatial resolution phase-sensitive optical time domain reflectometer with a frequency-swept pulse. Opt. Lett. 2017, 42, 391–394. [Google Scholar] [CrossRef]
- Jing, N.; Teng, C.; Zheng, J.; Wang, G.; Chen, Y.; Wang, Z. A Liquid Level Sensor Based on a Race-Track Helical Plastic Optical Fiber. IEEE Photonics Technol. Lett. 2016, 29, 158–160. [Google Scholar] [CrossRef]
- Jing, N. Liquid level measurement based on multi-S-bend plastic optical fiber. Sens. Rev. 2019, 39, 522–524. [Google Scholar] [CrossRef]
- Lomer, M.; Arrue, J.; Jauregui, C.; Aiestaran, P.; Zubia, J.; López-Higuera, J.M. Lateral polishing of bends in plastic optical fibers applied to a multipoint liquid-level measurement sensor. Sens. Actuators A Phys. 2007, 137, 68–73. [Google Scholar] [CrossRef]
- Lomer, M.; Quintela, A.; López-Amo, M.; Zubia, J.; López-Higuera, J.M. A quasi-distributed level sensor based on a bent side-polished plastic optical fibre cable. Meas. Sci. Technol. 2007, 18, 2261–2267. [Google Scholar] [CrossRef]
- Xue, P.; Bao, H.; Wu, B.; Zheng, J. Fabrication of a screw-shaped plastic optical fiber for liquid level measurement. Opt. Fiber Technol. 2020, 57, 102237. [Google Scholar] [CrossRef]
- Park, J.; Park, Y.J.; Shin, J.-D. Plastic optical fiber sensor based on in-fiber microholes for level measurement. Jpn. J. Appl. Phys. 2015, 54, 028002. [Google Scholar] [CrossRef]
- Lin, X.; Ren, L.; Xu, Y.; Chen, N.; Ju, H.; Liang, J.; He, Z.; Qu, E.; Hu, B.; Li, Y. Low-Cost Multipoint Liquid-Level Sensor with Plastic Optical Fiber. IEEE Photonics Technol. Lett. 2014, 26, 1613–1616. [Google Scholar] [CrossRef]
- Antunes, P.; Dias, J.; Paixão, T.; Mesquita, E.; Varum, H.; André, P. Liquid level gauge based in plastic optical fiber. Measurement 2015, 66, 238–243. [Google Scholar] [CrossRef]
- Mesquita, E.; Paixão, T.; Antunes, P.; Coelho, F.; Ferreira, P.; André, P.; Varum, H. Groundwater level monitoring using a plastic optical fiber. Sens. Actuators A Phys. 2016, 240, 138–144. [Google Scholar] [CrossRef]
- Teng, C.; Liu, H.; Deng, H.; Deng, S.; Yang, H.; Xu, R.; Chen, M.; Yuan, L.; Zheng, J. Liquid Level Sensor Based on a V-Groove Structure Plastic Optical Fiber. Sensors 2018, 18, 3111. [Google Scholar] [CrossRef]
- Montero, D.S.; Vázques, G. Self-referenced optical network for remote interrogation of quasi-distributed fiber-optic intensity sensors. Opt. Fiber Technol. 2020, 58, 102291. [Google Scholar] [CrossRef]
- Yang, C.; Chen, S.; Yang, G. Fiber optical liquid level sensor under cryogenic environment. Sens. Actuators A Phys. 2001, 94, 69–75. [Google Scholar] [CrossRef]
- Vázquez, C.; Gonzalo, A.B.; Vargas, S.; Montalvo, J. Multi-sensor system using plastic optical fibers for intrinsically safe level measurements. Sens. Actuators A Phys. 2004, 116, 22–32. [Google Scholar] [CrossRef]
- Chen, P.K.; McMillen, B.; Buric, M.; Jewart, C.; Xu, W. Self-heated fiber Bragg grating sensors. Appl. Phys. Lett. 2005, 86, 143502. [Google Scholar] [CrossRef]
- Antonio-Lopeza, J.E.; Torres-Cisneros, M.; Arredondo-Lucio, J.A.; Sanchez-Mondragon, J.J.; LiKamWa, P.; May-Arrioja, D.A. Novel multimode interference liquid level sensors. In Proceedings of the International Society for Optical Engineering, Oaxaca, Mexico, 14 October 2010. [Google Scholar]
- Ribeiro, L.A.; Rosolem, J.B.; Dini, D.C.; Floridia, C.; Hortencio, C.A.; da Costa, E.F.; Bezerra, E.W.; de Oliveira, R.B.; Loichate, M.D.; Durelli, A.S. Fiber optic bending loss sensor for application on monitoring of embankment Dams. In Proceedings of the 2011 SBMO/IEEE MTT-S International Microwave & Optoelectronics Conference (IMOC), Natal, Brazil, 29 October–1 November 2011. [Google Scholar] [CrossRef]
- Yoo, W.J.; Sim, H.I.; Shin, S.H.; Jang, K.W.; Cho, S.; Moon, J.H.; Lee, B. A Fiber-Optic Sensor Using an Aqueous Solution of Sodium Chloride to Measure Temperature and Water Level Simultaneously. Sensors 2014, 14, 18823–18836. [Google Scholar] [CrossRef] [PubMed]
- Marques, C.A.F.; Pospori, A.; Saez-Rodriguez, D.; Nielsen, K.; Bang, O.; Webb, D.J. Fiber-optic liquid level monitoring system using microstructured polymer fiber Bragg grating array sensors: Performance analysis. In Proceedings of the International Society for Optical Engineering, Curitiba, Brazil, 28 September 2015. [Google Scholar]
- Chen, Z.; Hefferman, G.; Wei, T. Multiplexed Oil Level Meter Using a Thin Core Fiber Cladding Mode Exciter. IEEE Photonics Technol. Lett. 2015, 27, 2215–2218. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, Y.; Jin, B.; Wang, Y.; Zhang, M. Quasi-Distributed Optical Fiber Sensor for Liquid-Level Measurement. IEEE Photonics, J. 2017, 9, 6805107. [Google Scholar] [CrossRef]
- Leal-Juniora, G.A.; Marques, C.; Frizera, A.; Pontes, M.J. Multi-interface level in oil tanks and applications of optical fiber sensors. Opt. Fiber Technol. 2018, 40, 82–92. [Google Scholar] [CrossRef]
- Noor, M.Y.M.; Abdullah, A.S.; Azmi, A.I.; Ibrahim, M.H.; Salim, M.R.; Kassim, N. Discrete liquid level fiber sensor. Telkomnika 2019, 17, 1966–1972. [Google Scholar] [CrossRef]
- Lee, H.-K.; Choo, J.; Shin, G. A Simple All-Optical Water Level Monitoring System Based on Wavelength Division Multiplexing with an Arrayed Waveguide Grating. Sensors 2019, 19, 3095. [Google Scholar] [CrossRef]
- Lee, H.-K.; Choo, J.; Shin, G.; Kim, S.-M. On-site water level measurement method based on wavelength division multiplexing for harsh environments in nuclear power plants. Nucl. Eng. Technol. 2020, 52, 2847–2851. [Google Scholar] [CrossRef]
- Lee, C.-H.; Sorin, W.V.; Kim, B.Y. Fiber to the Home Using a PON Infrastructure. J. Lightwave Technol. 2006, 24, 4568–4583. [Google Scholar] [CrossRef]
- Kim, B.W. RSOA-Based Wavelength-Reuse Gigabit WDM-PON. J. Opt. Soc. Korea 2008, 12, 337–345. [Google Scholar] [CrossRef]
- Lee, H.-K.; Lee, H.-J.; Lee, C.-H. A Simple and Color-Free WDM-Passive Optical Network Using Spectrum-Sliced Fabry-Perot Laser Diodes. IEEE Photonics Technol. Lett. 2008, 20, 220–222. [Google Scholar] [CrossRef]
- Lee, H.-K.; Cho, H.-S.; Kim, J.-Y.; Lee, C.-H. A WDM-PON with an 80 Gb/s capacity based on wavelength-locked Fabry-Perot laser diode. Opt. Express 2010, 18, 18077–18085. [Google Scholar] [CrossRef] [PubMed]
- Moon, J.-H.; Choi, K.-M.; Mun, S.-G.; Lee, C.-H. An Automatic Wavelength Control Method of a Tunable Laser for a WDM-PON. IEEE Photonics Technol. Lett. 2009, 21, 325–327. [Google Scholar] [CrossRef]
- Moon, S.-R.; Lee, H.-K.; Lee, C.-H. Automatic Wavelength Allocation Method Using Rayleigh Backscattering for a WDM-PON with Tunable Lasers. J. Opt. Commun. Netw. 2013, 5, 190–197. [Google Scholar] [CrossRef]
- Lee, H.-K.; Choo, J.; Shin, G.; Kim, J. Long-Reach DWDM-Passive Optical Fiber Sensor Network for Water Level Monitoring of Spent Fuel Pool in Nuclear Power Plant. Sensors 2020, 20, 4218. [Google Scholar] [CrossRef]
- Luo, Z.; Wen, H.; Guo, H.; Yang, M. A time-and wavelength-division multiplexing sensor network with ultra-weak fiber Bragg gratings. Opt. Express 2013, 21, 22799–22807. [Google Scholar] [CrossRef]
- Ferreira, L.A.; Cavaleiro, P.; Santos, J.L. Demodulation of two time-multiplexed fiber Bragg sensors using spectral characteristics. Pure Appl. Opt. 1997, 6, 717. [Google Scholar] [CrossRef][Green Version]
- Brooks, J.L.; Wentworth, R.H.; Youngquist, R.C.; Tur, M.; Kim, B.Y.; Shaw, H.J. Coherence multiplexing of fiber-optic interferometric sensors. J. Lightwave Technol. 1985, 3, 1062–1072. [Google Scholar] [CrossRef]
- Zhang, M.; Sun, Q.; Wang, Z.; Li, X.; Liu, H.; Liu, D. A large capacity sensing network with identical weak fiber Bragg gratings multiplexing. Opt. Comm. 2012, 285, 3082–3087. [Google Scholar] [CrossRef]
- Leandro, D.; Ullan, A.; Lopez-Amo, M.; Lopez-Higuera, J.M.; Loayssa, A. Remote (155 km) Fiber Bragg Grating Interrogation Technique Combining Raman, Brillouin, and Erbium Gain in a Fiber Laser. IEEE Photonics Technol. Lett. 2011, 23, 621–623. [Google Scholar] [CrossRef]
- Fernandez-Vallejo, M.; Leandro, D.; Loayssa, A.; Lopez-Amo, M. Fiber Bragg grating interrogation technique for remote sensing (100 km) using a hybrid Brillouin-Raman fiber laser. In Proceedings of the 21st International Conference on Optical Fibre Sensors (OFS21), Ottawa, ON, Canada, 15–19 May 2011; Volume 7753. [Google Scholar]
- Saitoh, T.; Nakamura, K.; Takahashi, Y.; Iida, H.; Iki, Y.; Miyagi, K. Ultra-Long-Distance Fiber Bragg Grating Sensor System. IEEE Photonics Technol. Lett. 2007, 19, 1616–1618. [Google Scholar] [CrossRef]
- Simatupang, J.W.; Lin, S.-C. A study on Rayleigh backscattering noise in single fiber transmission PON. Int. J. Innov. Res. Technol. Sci. 2016, 4, 11–15. [Google Scholar]
- Kim, J.-Y.; Lee, H.-L.; Lee, C.-H. Self-Restorable WDM-PON with a Color-Free Optical Source. J. Opt. Commun. Netw. 2009, 1, 565–570. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year/Reference | Interrogation | No. of SUs | Type of SU | Modulation Mechanism |
|---|---|---|---|---|
| 2007/[22] | LED 1 (@ 660 nm) + OPM 2 | 8 | U-shape bending sensor | Intensity |
| 2007/[23] | SLS 3 (@ 632.8 nm) + OPM | 18 | Polished lateral spire sensor | Intensity |
| 2014/[26] | SLS (@ 660 nm) + OPM | 7 | POF segments | Intensity |
| 2015/[27] | LED (@ 660 nm) + OPM | 26 | Engraved grooves in POF | Intensity |
| 2015/[25] | SLS (@ 633 nm) + OPM | 8 | Micro holes in POF | Intensity |
| 2016/[28] | LED (@ 670 nm) + OPM | 10 | Grooves in POF | Intensity |
| 2017/[20] | SLS (@ 653 nm) + OPM | 30 | Race-track helical POF | Intensity |
| 2018/[29] | SLS (@ 635 nm) + OPM | 20 | V-grooves in POF | Intensity |
| 2019/[21] | SLS (@ 635 nm) + OPM | 20 | Multi S-bend POF | Intensity |
| 2020/[24] | SLS (@ 635 nm) + OPM | 6 | Screw-shaped POF | Intensity |
| Year/Reference | Interrogation | Multiplexing | No. of Channel | Type of SU | Modulation Mechanism |
|---|---|---|---|---|---|
| 2001/[31] | OTDR | TDM | 2 | Right angle prism probe (R 5) | Intensity |
| 2004/[32] | LD array + OPM | SDM (+FDM) | 8 | POF sensor head (T 6) | Intensity |
| 2005/[33] | BLS + OSA 1 | CWDM | 4 | FBG array (R) | Wavelength |
| 2010/[34] | TLS 2 + OSA | CWDM | 2 | 105/125 MMF 7 (R) | Intensity |
| 2011/[35] | OTDR | TDM | 6 | Bending loss sensor (R) | Intensity |
| 2014/[36] | OTDR | TDM | 3 | Special probe with NaCl solution (R) | Intensity |
| 2015/[37] | BLS + OSA | CWDM | 5 | FBG array (R) | Wavelength |
| 2015/[38] | OFDR 3 | TDM | 2 | Thin core fiber (R) | Intensity |
| 2017/[39] | OCDR 4 | TDM | 10 | FC 8-type Fiber Connector (R) | Intensity |
| 2018/[40] | TLS + OSA | CWDM | 2 | FBG-embedded diaphragm sensor (R) | Wavelength |
| 2019/[41] | BLS + OPM | SDM | 4 | Cleaved end facet SMF (R) | Intensity |
| 2019/[42] | BLS + OSA | DWDM | 11 | Optical patch cord (R) | Intensity |
| 2020/[43] | BLS + OPM | DWDM | 11 | Optical patch cord (R) | Intensity |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.-K.; Choo, J.; Kim, J. Multiplexed Passive Optical Fiber Sensor Networks for Water Level Monitoring: A Review. Sensors 2020, 20, 6813. https://doi.org/10.3390/s20236813
Lee H-K, Choo J, Kim J. Multiplexed Passive Optical Fiber Sensor Networks for Water Level Monitoring: A Review. Sensors. 2020; 20(23):6813. https://doi.org/10.3390/s20236813
Chicago/Turabian StyleLee, Hoon-Keun, Jaeyul Choo, and Joonyoung Kim. 2020. "Multiplexed Passive Optical Fiber Sensor Networks for Water Level Monitoring: A Review" Sensors 20, no. 23: 6813. https://doi.org/10.3390/s20236813
APA StyleLee, H.-K., Choo, J., & Kim, J. (2020). Multiplexed Passive Optical Fiber Sensor Networks for Water Level Monitoring: A Review. Sensors, 20(23), 6813. https://doi.org/10.3390/s20236813