On the Challenges and Potential of Using Barometric Sensors to Track Human Activity


Abstract
1. Introduction
1.1. Development of Barometric Sensors
1.2. Barometers for the Tracking of Human Activity
2. Tracking Human Activities: Background about Data Collection
2.1. Sensors and Sensor Suites
2.2. Placement and Orientation of Sensors
2.3. Sampling Frequency for Capturing Human Activities
2.4. Classes of Human Activity
2.5. Nature of Data
2.6. The Class Imbalance Issues in the Tracking of Human Activity
2.7. The Physical Characteristics of Carriers
2.8. Annotation Techniques
3. On the Use of the Barometer in Human Activity Recognition
3.1. Barometric Pressure Sensor for Tracking Human Activity
3.2. Data Processing for Sensed Barometric Pressure
3.3. Classifiers for HAR
3.4. Applications: Barometer-Only Studies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Use of Barometer | Factors Considered | Contributions and Applications | Activity Class(es) | Location | Time Period |
|---|---|---|---|---|---|---|
| [81] | Estimate altitude and altitude changes | Altitude, climate and weather, and sensor accuracy | Evaluate sensors to estimate the altitude of airplane above ground and the orientation angle of wings using dual-device systems | – | Indoor | Short |
| [106] | Estimate altitude and altitude changes | Altitude, air velocity during motion, and built environment | Estimate the location of a traveler in a subway using only a barometer | T | Outdoor | Short |
| [87] | Detect gait patterns and estimate altitude changes | Altitude | Step detection and activity recognition including VDA using a barometer | A | Indoor | Short |
| [79] | Detect vehicle patterns and altitude changes | Altitude, climate and weather, air velocity during motion, and sensor accuracy | Identify transportation modes and ambulation activities using a barometer | A & T | Indoor and outdoor | Short |
| [74] | Detect door opening/closing in building and estimate altitude changes | Altitude, climate and weather, and built environment | Detect door opening/closing to monitor building activities and recognize VDA | A | Indoor and outdoor | Short & long |
| [108] | Estimate altitude and altitude changes | Altitude, climate and weather, built environment, air velocity during motion, and measurement accuracy | Recommendations to build indoor localization from reference pressure | A | Indoor | Long |
| [66] | Estimate altitude and altitude changes | Altitude, climate and weather, built environment, and sensor accuracy | Floor localization using reference pressure from multiple barometers in each floor | A | Indoor | Short |
| [99] | Estimate altitude and altitude changes | Altitude, climate and weather, and sensor accuracy | Calibration of wearable barometers using crowd-sourcing to enable floor localization. No knowledge of building or additional infrastructure is required | A | Indoor | Long |
| [84] | Estimate altitude and altitude changes | Altitude, built environment, and sensor accuracy | Studied the different factors that affect barometric pressure in the built environment. Estimate indoor altitude | A | Indoor | Short |
| [68] | Estimate altitude changes and mode of vertical transportation | Altitude, climate and weather, built environment, and sensor accuracy | Identify VDA and mode of vertical transport | A | Indoor | Short and long |
| [104] | Estimate altitude | Altitude, climate and weather, and sensor accuracy | Estimation of altitude for indoors and outdoors | A | Indoor and outdoor | Short |
| [28] | Estimate altitude changes | Altitude, climate and weather, built environment, and sensor accuracy | Activity recognition including VDA using only barometer and comparison with accelerometer-only and GPS-only approaches | A & T | Indoor and outdoor | Short |
| [85] | Estimate altitude | Altitude, climate and weather, and sensor accuracy | Barometer measurement error modeling and correction to track air vehicle | – | Outdoor | Short |
| [78] | Estimate altitude and altitude changes | Altitude, climate and weather, built environment, air velocity due to motion, and sensor accuracy | Compared barometric pressure data with topographical elevation data to localize and track vehicles | T | Outdoor | Short and long |
3.5. Applications: Multi-Sensor Studies
| Ref. | Additional Sensors | Use of Barometer | Factors Considered | Contributions and Applications | Activity Class(es) | Location | Time Period |
|---|---|---|---|---|---|---|---|
| [69] | Accelerometer, Magnetometer, Gyroscope | Estimate altitude changes | Altitude, climate and weather, built environment, and sensor accuracy | Improved recognition of VDA using barometer | A | Indoor | Short |
| [82] | Accelerometer, Gyroscope | Estimate altitude changes | Altitude | Identify ambulation activities including VDA | A | Indoor | Short |
| [110] | Accelerometer, Gyroscope, Magnetometer, WiFi, Microphone | Estimate altitude changes | Altitude | Determine location semantics, such as restroom, desk, elevator, etc., using sensor fusion | A | Indoor and outdoor | Short |
| [71] | Light, GPS | Estimate altitude and floor level | Altitude | Vertical indoor mapping | A | Indoor and outdoor | Short |
| [72] | WiFi | Estimate altitude and altitude changes | Altitude, climate and weather, and sensor accuracy | Improved barometer measurement error model and sensor fusion for floor localization | A | Indoor | Short and long |
| [73] | WiFi | Estimate altitude | Altitude and sensor accuracy | Improved floor localization from crowd sourcing using few devices equipped with a barometer | – | Indoor | Short |
| [100] | WiFi | Estimate altitude and altitude changes | Altitude, climate and weather, and sensor accuracy | Floor level identification by hybrid approach between barometer-only and WiFi-only methods. The barometer-only approach uses crowd-sensed barometer data for self-calibration and builds an elevation map independently in each device | A | Indoor | Short |
| [111] | Accelerometer, Gyroscope | Estimate altitude and correct accelerometer errors | Altitude | Improved IMU–barometer sensor fusion | – | Indoor | Short |
| [86] | Accelerometer, Gyroscope | Estimate altitude changes | Altitude, climate, and weather | Improved sensor fusion to track vertical motions | A | Indoor | Short |
| [89] | Accelerometer, Gyroscope | Estimate altitude changes | Altitude | Improved accuracy in recognizing ambulation activities including VDA | A | Indoor | Short |
| [44] | Accelerometer | Estimate altitude changes | Altitude | Using a barometer improved overall activity recognition including VDA and better estimated of energy expenditure | A | Indoor | Short |
| [95] | Accelerometer | Estimate altitude and altitude changes | Altitude | Child activity recognition including VDA to prevent injuries | A | Indoor | Short |
| [75] | Accelerometer, Magnetometer, Gyroscope | Altitude, built environment, and sensor accuracy | Activity recognition including VDA for health monitoring of stroke patients | A | Indoor and outdoor | Short | |
| [93] | Accelerometer | Estimate altitude changes | Altitude | Improved accuracy by including a barometer for fall detection | A | Indoor | Short |
| [76] | Accelerometer | Estimate altitude changes | Altitude | Improved fall detection using a barometer | A and T | Indoor | Short |
| [83] | Accelerometer | Estimate altitude changes | Altitude | Low-power fall detection for long-term monitoring | A | Indoor and outdoor | Short and long |
| [91] | Accelerometer, Gyroscope, Magnetometer, Foot pressure | Estimate altitude change | Altitude | Activity recognition including VDA for better estimation of elderly physical activity | A | Indoor | Short |
| [97] | Accelerometer | Estimate altitude changes | Altitude and sensor accuracy | Detection of VDA improved the estimation of physical activity and energy expenditure | A + cycling | Indoor and outdoor | Short |
| [112] | Accelerometer | Estimate altitude changes | Altitude, climate and weather, and sensor accuracy | Detection of VDA improved the estimation of energy consumption and physical activity | A | Indoor and outdoor | Short and long |
| [101] | Accelerometer | Calculate vertical displacement and estimate floor level | Altitude, climate and weather, and built environment | Floor localization | A | Indoor | Short |
| [67] | Accelerometer, Gyroscope | Estimate altitude changes | Altitude | Improved identification of VDA for indoor localization | A | Indoor | Short |
| [77] | GPS | Detect vehicle patterns | Altitude, climate and weather, built environment, and air velocity during motion | Use the effect of elevation changes in roads and air velocity due to motion to detect the motion state of a vehicle and help identify traffic congestion | T | Outdoor | Long |
| [92] | Accelerometer | Estimate altitude changes | Altitude | Reduced position and orientation dependency using a barometer | A | – | Short |
| [80] | Accelerometer | Estimate altitude changes | Altitude, climate and weather, and sensor accuracy | Earliest known activity classification including VDA using a barometer | A | Indoor | Short |
| [65] | Accelerometer, Magnetometer | Estimate altitude changes | Altitude, built environment, and sensor accuracy | Identify mode of vertical transportation for indoor navigation | A | Indoor | Short |
| [90] | Accelerometer, Gyroscope | Estimate altitude changes | Altitude and climate and weather | Improved activity recognition including VDA using a barometer by considering behavioral rules and applying context in a two-step process | A | Indoor | Short |
| [113] | WiFi, Bluetooth | Estimate altitude and altitude changes | Altitude, climate and weather, and sensor accuracy | Used WiFi/Bluetooth beacon to localize the user and recorded the respective pressure as the reference pressure for that floor. Any change in elevation is then used to identify the floor level | A | Indoor | Short |
| [114] | Accelerometer, Gyroscope, Magnetometer, WiFi | Estimate altitude and altitude changes | Altitude | 3D indoor localization | A | Indoor | Short |
| [70] | Accelerometer, Gyroscope, Magnetometer | Estimate altitude changes | Altitude | Identify the mode of vertical transport | A | Indoor | Short |
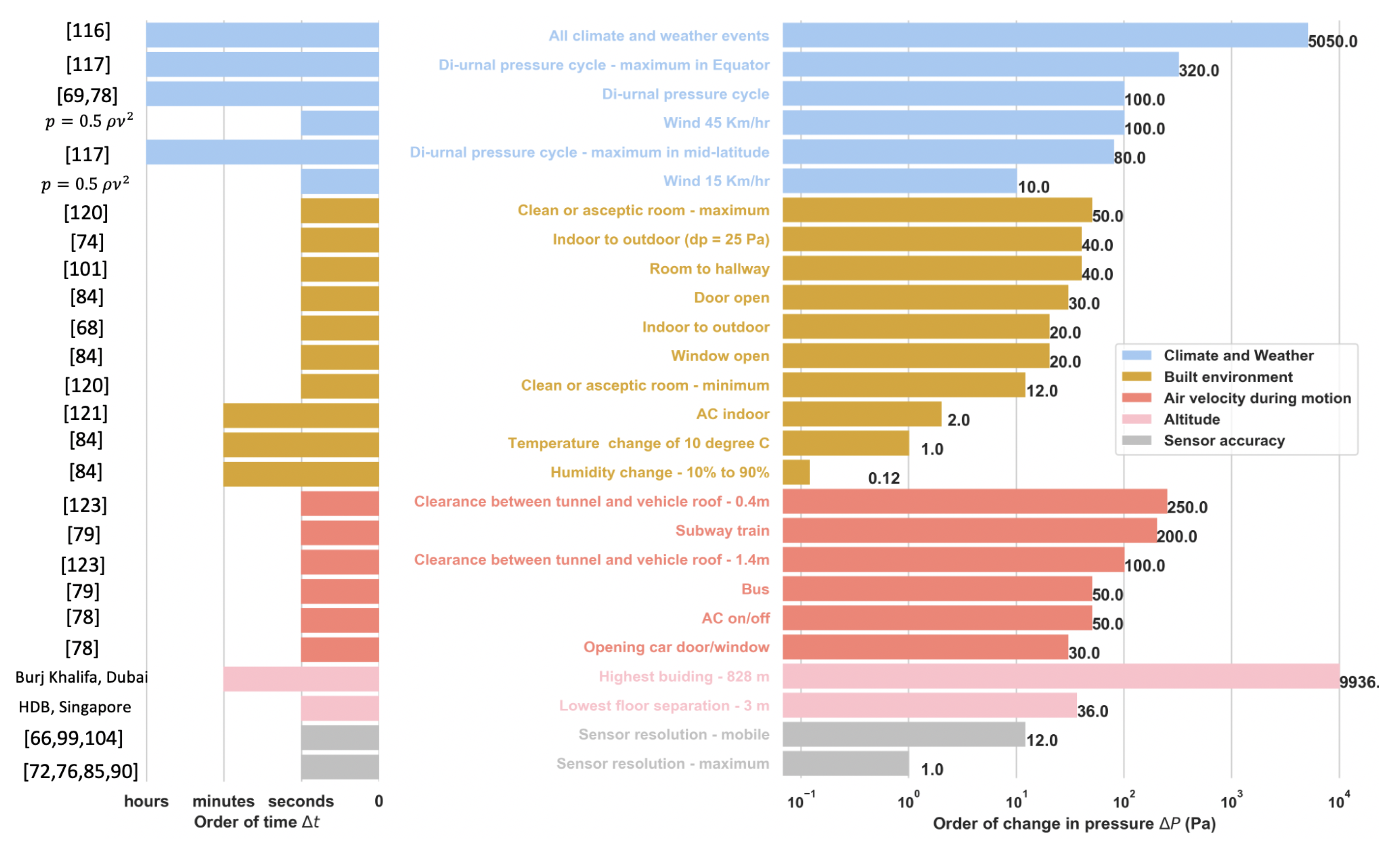
4. Factors Affecting Barometric Pressure
| Factors | References |
|---|---|
| Climate and weather | [28,68,69,78,79,85,99,100,104,108,116,117,118] |
| Built environment | [66,68,74,84,101,119,120,121] |
| Air velocity during motion | [77,78,79,106,122,123,124] |
| Sensor accuracy | [66,69,72,76,78,85,90,99,100,108,113] |
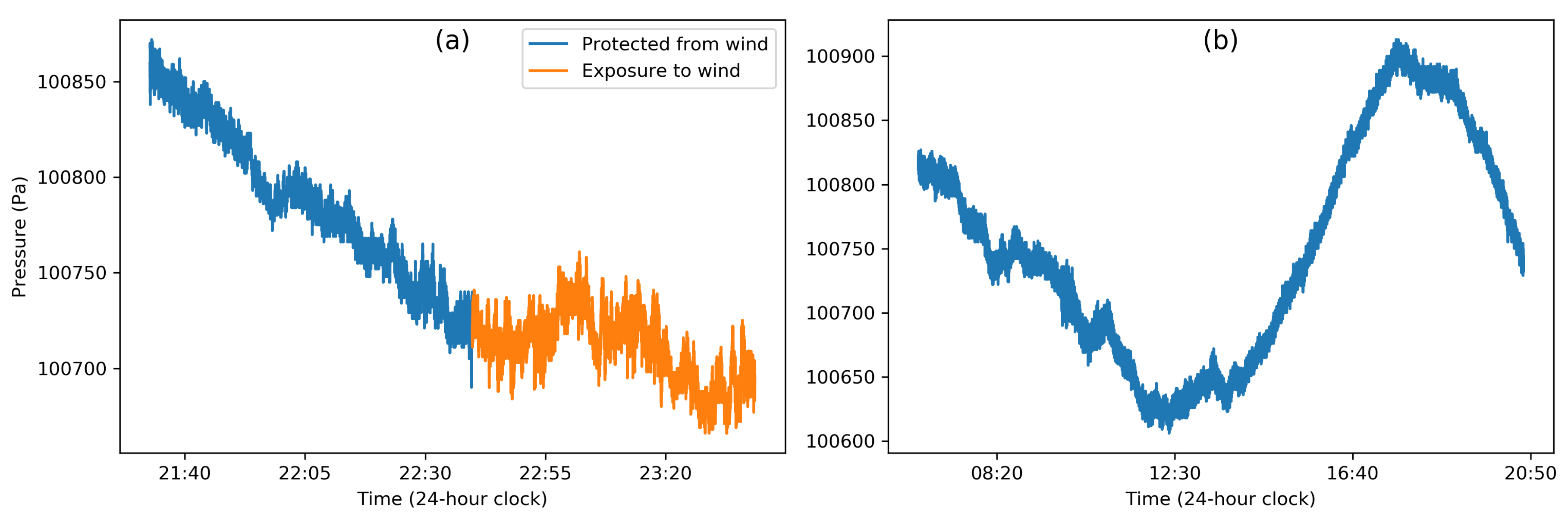
4.1. Climate and Weather
4.2. Built Environment
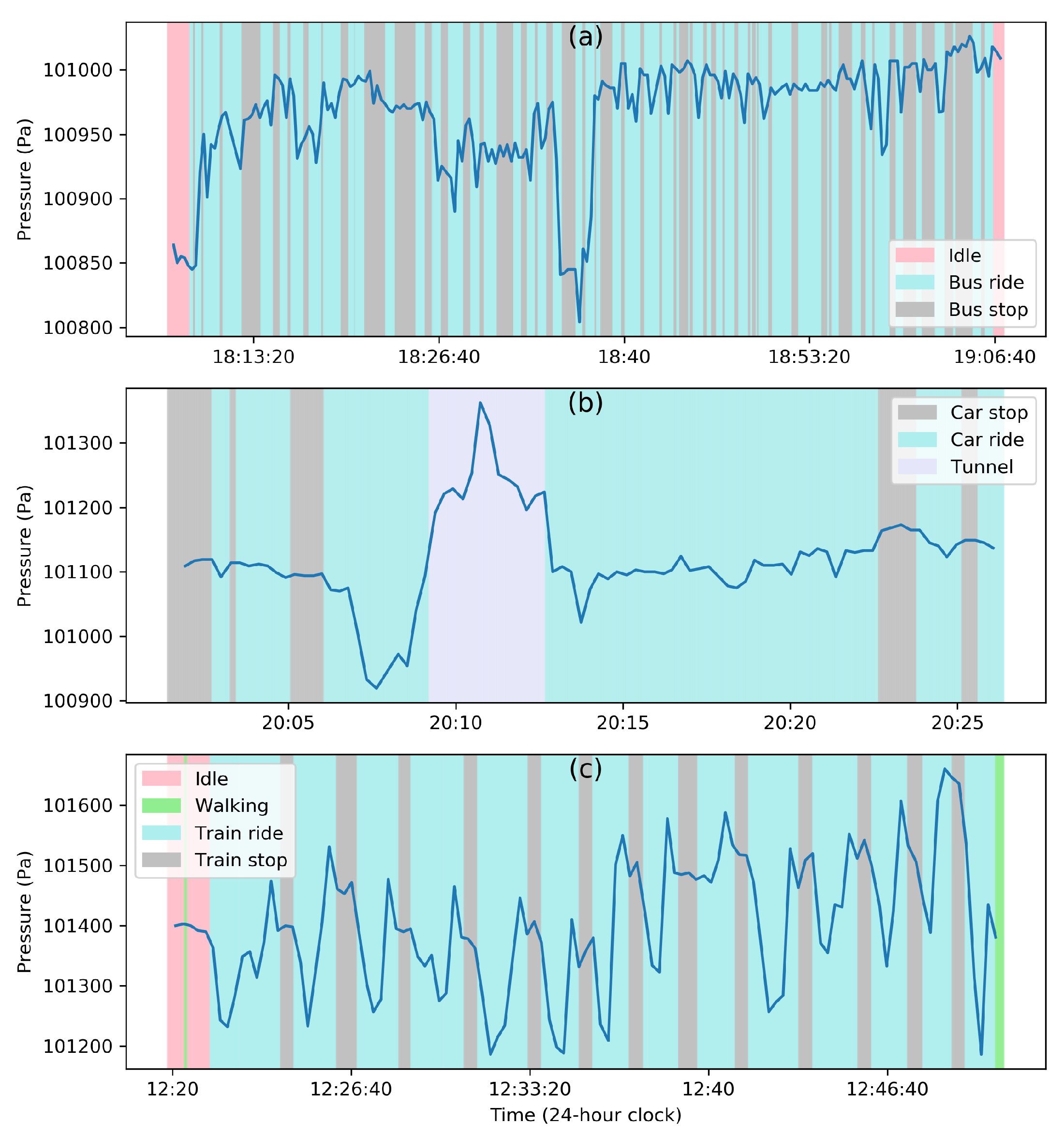
4.3. Air Velocity during Motion
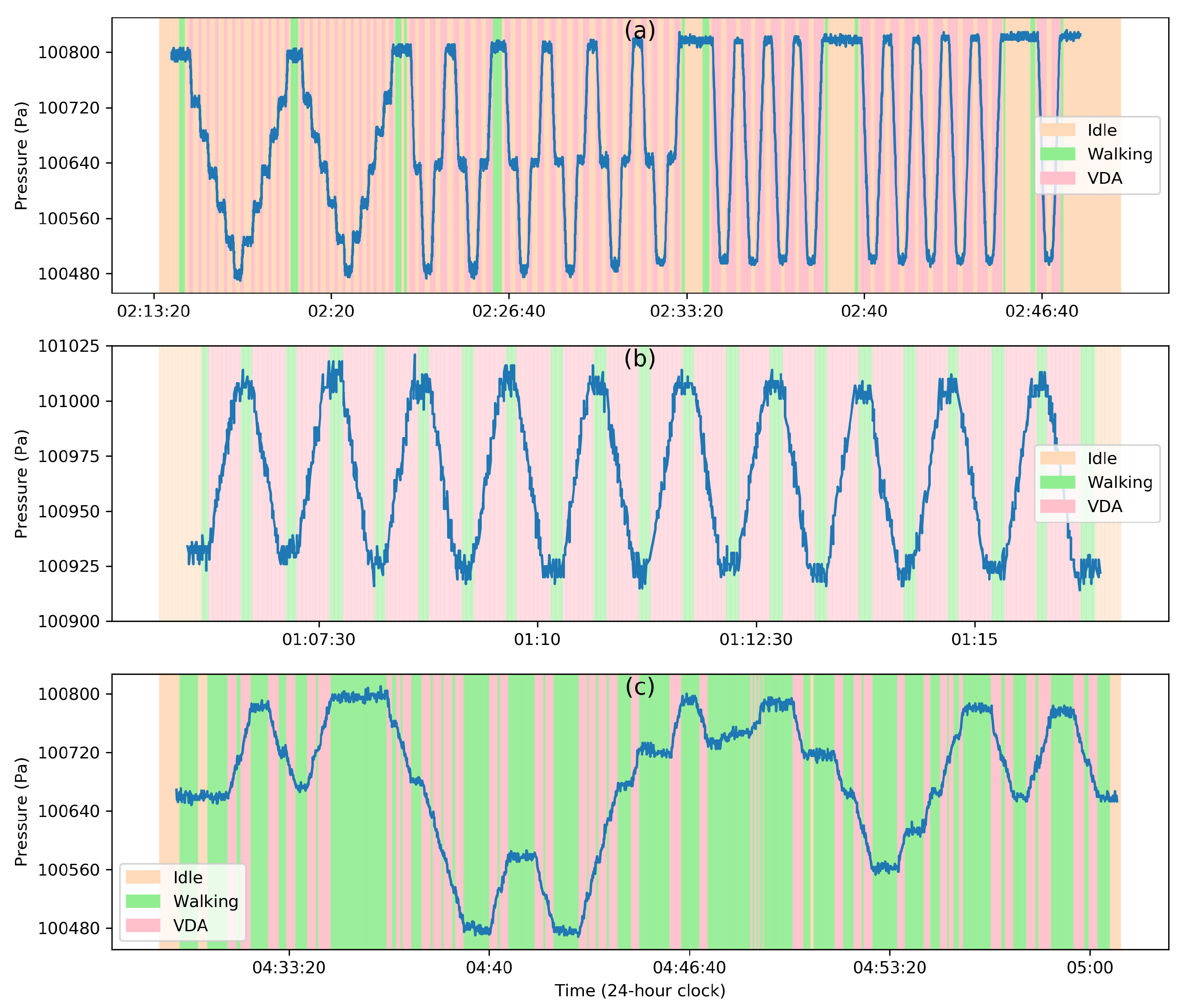
4.4. Altitude
4.5. Sensor Accuracy
5. Discussion
5.1. Key Findings
5.2. Challenges and Future Directions for Different Applications
5.3. Privacy Issues
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| MEMS | Microelectromechanical System |
| GPS | Global Positioning System |
| ADL | Activities of Daily Living |
| UAV | Unmanned Aerial Vehicle |
| IoT | Internet of Things |
| IMU | Inertial Measurement Unit |
| Pa | Pascal (unit) |
| Hz | Hertz (unit) |
| PCA | Principal Component Analysis |
| VDA | Vertical Displacement Activities |
| SMOTE | Synthetic Minority Over-sampling Technique |
| BMI | Body Mass Index |
| ML | Machine Learning |
| RFID | Radio Frequency IDentification |
| FIR | Finite Impulse Response filters |
| IIR | Infinite Impulse Response filters |
| DP | Differential Pressure |
| HAR | Human Activity Recognition |
| SVM | Support Vector Machine |
| LSTM | Long Short Term Memory networks |
| HMM | Hidden Markov Model |
| ANN | Artificial Neural Network |
| RNN | Recurrent Neural Network |
| DTW | Dynamic Time Warping |
| HVAC | Heating, Ventilation, and Air-Conditioning system |
| AC | Air-Conditioning system |
| ADEV | Allen Deviation |
References
- Magie, W.F. A Source Book in Physics; Harvard University Press: Cambridge, MA, USA, 1969. [Google Scholar]
- Pascal, B.; Barry, F.; Spiers, I.H.B.; Spiers, A.G.H.; Stevin, S.; Galilei, G.; Torricelli, E. The Physical Treatises of Pascal: The Equilibrium of Liquids and the Weight of the Mass of the Air; Michigan Publishing, University of Michigan Library: Ann Arbor, MI, USA, 1937. [Google Scholar]
- Middleton, W.E. The History of the Barometer; Baros Books: Trowbridge, UK, 1994. [Google Scholar]
- Figuier, L.; Gautier, É. L’Année Scientifique et Industrielle; Hachette et Cie: Paris, France, 1861; Volume 5. [Google Scholar]
- Five Billion Bosch MEMS Sensors. Available online: https://www.bosch-presse.de/pressportal/de/en/five-billion-bosch-mems-sensors-42857.html (accessed on 15 August 2020).
- Barometric Pressure Sensors: The Design Engineer’s Guide: Avnet Abacus. Available online: https://www.avnet.com/wps/portal/abacus/solutions/technologies/sensors/pressure-sensors/media-types/barometric/ (accessed on 15 August 2020).
- Lara, O.D.; Labrador, M.A. A survey on human activity recognition using wearable sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar]
- Del Rosario, M.B.; Redmond, S.J.; Lovell, N.H. Tracking the evolution of smartphone sensing for monitoring human movement. Sensors 2015, 15, 18901–18933. [Google Scholar]
- Parviainen, J.; Kantola, J.; Collin, J. Differential barometry in personal navigation. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 148–152. [Google Scholar]
- Janidarmian, M.; Fekr, A.R.; Radecka, K.; Zilic, Z. A comprehensive analysis on wearable acceleration sensors in human activity recognition. Sensors 2017, 17, 529. [Google Scholar] [CrossRef]
- Twomey, N.; Diethe, T.; Fafoutis, X.; Elsts, A.; McConville, R.; Flach, P.; Craddock, I. A Comprehensive Study of Activity Recognition Using Accelerometers. Informatics 2018, 5, 27. [Google Scholar] [CrossRef]
- Shoaib, M.; Bosch, S.; Incel, O.D.; Scholten, H.; Havinga, P.J. Fusion of smartphone motion sensors for physical activity recognition. Sensors 2014, 14, 10146–10176. [Google Scholar]
- Chung, S.; Lim, J.; Noh, K.J.; Kim, G.; Jeong, H. Sensor data acquisition and multimodal sensor fusion for human activity recognition using deep learning. Sensors 2019, 19, 1716. [Google Scholar] [CrossRef]
- Willetts, M.; Hollowell, S.; Aslett, L.; Holmes, C.; Doherty, A. Statistical machine learning of sleep and physical activity phenotypes from sensor data in 96,220 UK Biobank participants. Sci. Rep. 2018, 8, 1–10. [Google Scholar] [CrossRef]
- Yang, X.; Stewart, K.; Tang, L.; Xie, Z.; Li, Q. A review of GPS trajectories classification based on transportation mode. Sensors 2018, 18, 3741. [Google Scholar] [CrossRef]
- Huang, H.; Cheng, Y.; Weibel, R. Transport mode detection based on mobile phone network data: A systematic review. Transp. Res. C Emerg. Technol. 2019, 101, 297–312. [Google Scholar] [CrossRef]
- Mun, M.; Estrin, D.; Burke, J. Parsimonious mobility classification using GSM and WiFi traces. In Proceedings of the Fifth Workshop on Embedded Networked Sensors (HotEmNets), Raleigh, NC, USA, 5–7 November 2008; pp. 1–5. [Google Scholar]
- Sapiezynski, P.; Stopczynski, A.; Gatej, R.; Lehmann, S. Tracking human mobility using WiFi signals. PLoS ONE 2015, 10, e0130824. [Google Scholar] [CrossRef]
- Keramat Jahromi, K.; Zignani, M.; Gaito, S.; Rossi, G.P. Simulating human mobility patterns in urban areas. Simul. Model. Pract. Theory 2016, 62, 137–156. [Google Scholar] [CrossRef]
- Jiang, S.; Ferreira, J.; Gonzalez, M.C. Activity-Based Human Mobility Patterns Inferred from Mobile Phone Data: A Case Study of Singapore. IEEE Trans. Big Data 2016, 3, 208–219. [Google Scholar] [CrossRef]
- Prelipcean, A.C.; Gidófalvi, G.; Susilo, Y.O. Transportation mode detection–an in-depth review of applicability and reliability. Transp. Rev. 2017, 37, 442–464. [Google Scholar] [CrossRef]
- Kunze, K.; Lukowicz, P. Sensor placement variations in wearable activity recognition. IEEE Pervasive Comput. 2014, 13, 32–41. [Google Scholar] [CrossRef]
- Ustev, Y.E.; Durmaz Incel, O.; Ersoy, C. User, device and orientation independent human activity recognition on mobile phones: Challenges and a proposal. In Proceedings of the 2013 ACM Conference on Pervasive and Ubiquitous Computing Adjunct Publication, Zurich, Switzerland, 8–12 September 2013; pp. 1427–1436. [Google Scholar]
- Khan, A.M.; Lee, Y.K.; Lee, S.Y.; Kim, T.S. Human activity recognition via an accelerometer-enabled-smartphone using Kernel Discriminant Analysis. In Proceedings of the 2010 5th International Conference on Future Information Technology (FutureTech 2010), Busan, Korea, 21–23 May 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, Z.; Zhu, Q.; Soh, Y.C.; Zhang, L. Robust Human Activity Recognition Using Smartphone Sensors via CT-PCA and Online SVM. IEEE Trans. Ind. Inform. 2017, 13, 3070–3080. [Google Scholar] [CrossRef]
- Pannurat, N.; Thiemjarus, S.; Nantajeewarawat, E.; Anantavrasilp, I. Analysis of optimal sensor positions for activity classification and application on a different data collection scenario. Sensors 2017, 17, 774. [Google Scholar] [CrossRef]
- Maurer, U.; Smailagic, A.; Siewiorek, D.P.; Deisher, M. Activity recognition and monitoring using multiple sensors on different body positions. In Proceedings of the International Workshop on Wearable and Implantable Body Sensor Networks (BSN’06), Cambridge, MA, USA, 3–5 April 2006; p. 4. [Google Scholar]
- Vanini, S.; Faraci, F.; Ferrari, A.; Giordano, S. Using barometric pressure data to recognize vertical displacement activities on smartphones. Comput. Commun. 2016, 87, 37–48. [Google Scholar]
- Jerri, A.J. The Shannon sampling theorem—Its various extensions and applications: A tutorial review. Proc. IEEE 1977, 65, 1565–1596. [Google Scholar]
- Khan, A.; Hammerla, N.; Mellor, S.; Plötz, T. Optimising sampling rates for accelerometer-based human activity recognition. Pattern Recognit. Lett. 2016, 73, 33–40. [Google Scholar] [CrossRef]
- Yan, Z.; Subbaraju, V.; Chakraborty, D.; Misra, A.; Aberer, K. Energy-efficient continuous activity recognition on mobile phones: An activity-adaptive approach. In Proceedings of the International Symposium on Wearable Computers, Newcastle, UK, 18–22 June 2012; pp. 17–24. [Google Scholar] [CrossRef]
- Feng, T.; Timmermans, H.J. Transportation mode recognition using GPS and accelerometer data. Transp. Res. C Emerg. Technol. 2013, 37, 118–130. [Google Scholar] [CrossRef]
- Shen, L.; Stopher, P.R. Should we change the rules for trip identification for GPS travel records? In Proceedings of the 36th Australasian Transport Research Forum ATRF, Brisbane, Australia, 2–4 October 2013; pp. 1–11. [Google Scholar]
- Münzner, S.; Schmidt, P.; Reiss, A.; Hanselmann, M.; Stiefelhagen, R.; Dürichen, R. CNN-based sensor fusion techniques for multimodal human activity recognition. In Proceedings of the 2017 ACM International Symposium on Wearable Computers, Hawaii, HI, USA, 13–15 September 2017; pp. 158–165. [Google Scholar]
- Blanke, U.; Schiele, B. Remember and transfer what you have learned-recognizing composite activities based on activity spotting. In Proceedings of the International Symposium on Wearable Computers (ISWC), Seoul, Korea, 10–13 October 2010; pp. 1–8. [Google Scholar]
- Helaoui, R.; Niepert, M.; Stuckenschmidt, H. Recognizing interleaved and concurrent activities: A statistical-relational approach. In Proceedings of the 2011 IEEE International Conference on Pervasive Computing and Communications (PerCom), Seattle, WA, USA, 21–25 March 2011; pp. 1–9. [Google Scholar]
- Cleland, I.; Donnelly, M.P.; Nugent, C.D.; Hallberg, J.; Espinilla, M.; Garcia-Constantino, M. Collection of a Diverse, Realistic and Annotated Dataset for Wearable Activity Recognition. In Proceedings of the 2018 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops 2018), Athens, Greece, 19–23 March 2018; pp. 555–560. [Google Scholar] [CrossRef]
- Chen, Y.; Shen, C. Performance Analysis of Smartphone-Sensor Behavior for Human Activity Recognition. IEEE Access 2017, 5, 3095–3110. [Google Scholar] [CrossRef]
- Plötz, T.; Hammerla, N.Y.; Olivier, P.L. Feature learning for activity recognition in ubiquitous computing. In Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence, Barcelona, Spain, 16–22 July 2011. [Google Scholar]
- Garcia-Ceja, E.; Galván-Tejada, C.E.; Brena, R. Multi-view stacking for activity recognition with sound and accelerometer data. Inf. Fusion 2018, 40, 45–56. [Google Scholar] [CrossRef]
- Jordao, A.; Nazare Jr, A.C.; Sena, J.; Schwartz, W.R. Human activity recognition based on wearable sensor data: A standardization of the state-of-the-art. arXiv preprint 2018, arXiv:1806.05226. [Google Scholar]
- Murad, A.; Pyun, J.Y. Deep recurrent neural networks for human activity recognition. Sensors 2017, 17, 2556. [Google Scholar] [CrossRef]
- De-La-Hoz-Franco, E.; Ariza-Colpas, P.; Quero, J.M.; Espinilla, M. Sensor-based datasets for human activity recognition–A systematic review of literature. IEEE Access 2018, 6, 59192–59210. [Google Scholar]
- Wang, Z.; Jiang, M.; Hu, Y.; Li, H. An incremental learning method based on probabilistic neural networks and adjustable fuzzy clustering for human activity recognition by using wearable sensors. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 691–699. [Google Scholar] [CrossRef]
- Banos, O.; Damas, M.; Pomares, H.; Prieto, A.; Rojas, I. Daily living activity recognition based on statistical feature quality group selection. Expert Syst. Appl. 2012, 39, 8013–8021. [Google Scholar] [CrossRef]
- Anguita, D.; Ghio, A.; Oneto, L.; Parra, X.; Reyes-Ortiz, J.L. A public domain dataset for human activity recognition using smartphones. Esann 2013, 3, 3. [Google Scholar]
- Nazabal, A.; Garcia-Moreno, P.; Artes-Rodriguez, A.; Ghahramani, Z. Human Activity Recognition by Combining a Small Number of Classifiers. IEEE J. Biomed. Health Inform. 2016, 20, 1342–1351. [Google Scholar] [CrossRef]
- Lara, Ó.D.; Prez, A.J.; Labrador, M.A.; Posada, J.D. Centinela: A human activity recognition system based on acceleration and vital sign data. Pervasive Mob. Comput. 2012, 8, 717–729. [Google Scholar] [CrossRef]
- Bao, L.; Intille, S.S. Activity Recognition from User-Annotated Acceleration Data. In International Conference on Pervasive Computing; Springer: Berlin/Heidelberg, Germany, 2004; Volume 3001, pp. 1–17. [Google Scholar]
- Bota, P.; Silva, J.; Folgado, D.; Gamboa, H. A Semi-Automatic Annotation Approach for Human Activity Recognition. Sensors 2019, 19, 501. [Google Scholar] [CrossRef]
- Inoue, M.; Inoue, S.; Nishida, T. Deep recurrent neural network for mobile human activity recognition with high throughput. Artif. Life Robot. 2018, 23, 173–185. [Google Scholar] [CrossRef]
- Guan, Y.; Plötz, T. Ensembles of deep LSTM learners for activity recognition using wearables. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 1–28. [Google Scholar] [CrossRef]
- Ermes, M.; Pärkkä, J.; Mäntyjärvi, J.; Korhonen, I. Detection of daily activities and sports with wearable sensors in controlled and uncontrolled conditions. IEEE Trans. Inf. Technol. Biomed. 2008. [Google Scholar] [CrossRef]
- Nguyen, K.T.; Portet, F.; Garbay, C. Dealing with Imbalanced data sets for Human Activity Recognition using Mobile Phone sensors. In Proceedings of the 3rd International Workshop on Smart Sensing Systems, Rome, Italy, 25–28 June 2018. [Google Scholar]
- Capela, N.A.; Lemaire, E.D.; Baddour, N.; Rudolf, M.; Goljar, N.; Burger, H. Evaluation of a smartphone human activity recognition application with able-bodied and stroke participants. J. Neuroeng. Rehabil. 2016, 13, 1–10. [Google Scholar] [CrossRef]
- Almaslukh, B.; Artoli, A.M.; Al-Muhtadi, J. A robust deep learning approach for position-independent smartphone-based human activity recognition. Sensors 2018, 18, 3726. [Google Scholar] [CrossRef]
- Nweke, H.F.; Teh, Y.W.; Alo, U.R.; Mujtaba, G. Analysis of multi-sensor fusion for mobile and wearable sensor based human activity recognition. In Proceedings of the International Conference on Data Processing and Applications, Guangdong, China, 12–14 May 2018; pp. 22–26. [Google Scholar]
- Mehrang, S.; Pietilä, J.; Korhonen, I. An activity recognition framework deploying the random forest classifier and a single optical heart rate monitoring and triaxial accelerometer wrist-band. Sensors 2018, 18, 613. [Google Scholar] [CrossRef]
- Stikic, M.; Larlus, D.; Ebert, S.; Schiele, B. Weakly supervised recognition of daily life activities with wearable sensors. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2521–2537. [Google Scholar] [CrossRef]
- Incel, O.D.; Ozgovde, A. ARService: A Smartphone based Crowd-Sourced Data Collection and Activity Recognition Framework. Procedia Comput. Sci. 2018, 130, 1019–1024. [Google Scholar] [CrossRef]
- Anjum, A.; Ilyas, M.U. Activity recognition using smartphone sensors. In Proceedings of the 2013 IEEE 10th Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2013; pp. 914–919. [Google Scholar] [CrossRef]
- Sztyler, T.; Stuckenschmidt, H. On-body localization of wearable devices: An investigation of position-aware activity recognition. In Proceedings of the 2016 IEEE International Conference on Pervasive Computing and Communications, Sydney, Australia, 14–18 March 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Khan, A.M.; Lee, Y.K.; Lee, S.Y.; Kim, T.S. A triaxial accelerometer-based physical-activity recognition via augmented-signal features and a hierarchical recognizer. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 1166–1172. [Google Scholar]
- Huynh, D.T.G. Human Activity Recognition with Wearable Sensors. Ph.D. Thesis, Technische Universität, Berlin, Germany, 2008. [Google Scholar]
- Lang, C.; Kaiser, S. Classifying Elevators and Escalators in 3D Pedestrian Indoor Navigation Using Foot-Mounted Sensors. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–7. [Google Scholar]
- Xia, H.; Wang, X.; Qiao, Y.; Jian, J.; Chang, Y. Using multiple barometers to detect the floor location of smart phones with built-in barometric sensors for indoor positioning. Sensors 2015, 15, 7857–7877. [Google Scholar]
- Kronenwett, N.; Qian, S.; Mueller, K.; Trommer, G.F. Elevator and Escalator Classification for Precise Indoor Localization. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Muralidharan, K.; Khan, A.J.; Misra, A.; Balan, R.K.; Agarwal, S. Barometric phone sensors: More hype than hope! In Proceedings of the 15th Workshop on Mobile Computing Systems and Applications, Santa Barbara, CA, USA, 26–27 February 2014; p. 12. [Google Scholar]
- Liu, M.; Li, H.; Wang, Y.; Li, F.; Chen, X. Double-Windows-Based Motion Recognition in Multi-Floor Buildings Assisted by a Built-In Barometer. Sensors 2018, 18, 1061. [Google Scholar]
- Elhoushi, M.; Georgy, J.; Wahdan, A.; Korenberg, M.; Noureldin, A. Using portable device sensors to recognize height changing modes of motion. In Proceedings of the 2014 IEEE International Instrumentation and Measurement Technology Conference (I2mtc), Montevideo, Uruguay, 12–15 May 2014; pp. 477–481. [Google Scholar]
- Pipelidis, G.; Rad, O.R.M.; Iwaszczuk, D.; Prehofer, C.; Hugentobler, U. A novel approach for dynamic vertical indoor mapping through crowd-sourced smartphone sensor data. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Haque, F.; Dehghanian, V.; Fapojuwo, A.O.; Nielsen, J. A Sensor Fusion-Based Framework for Floor Localization. IEEE Sensors J. 2018, 19, 623–631. [Google Scholar]
- Shen, X.; Chen, Y.; Zhang, J.; Wang, L.; Dai, G.; He, T. BarFi: Barometer-aided Wi-Fi floor localization using crowdsourcing. In Proceedings of the 2015 IEEE 12th International Conference on Mobile Ad Hoc and Sensor Systems, Dallas, TX, USA, 19–22 October 2015; pp. 416–424. [Google Scholar]
- Wu, M.; Pathak, P.H.; Mohapatra, P. Monitoring building door events using barometer sensor in smartphones. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Osaka, Japan, 9–11 September 2015; pp. 319–323. [Google Scholar]
- Leuenberger, K.; Gonzenbach, R.; Wiedmer, E.; Luft, A.; Gassert, R. Classification of stair ascent and descent in stroke patients. In Proceedings of the 2014 11th International Conference on Wearable and Implantable Body Sensor Networks Workshops, Zurich, Switzerland, 16–19 June 2014; pp. 11–16. [Google Scholar]
- Bianchi, F.; Redmond, S.J.; Narayanan, M.R.; Cerutti, S.; Lovell, N.H. Barometric pressure and triaxial accelerometry-based falls event detection. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 619–627. [Google Scholar]
- Dimri, A.; Singh, H.; Aggarwal, N.; Raman, B.; Bansal, D.; Ramakrishnan, K. RoadSphygmo: Using barometer for traffic congestion detection. In Proceedings of the 2016 8th International Conference on Communication Systems and Networks (COMSNETS), Bangalore, India, 5–10 January 2016; pp. 1–8. [Google Scholar]
- Ho, B.J.; Martin, P.; Swaminathan, P.; Srivastava, M. From pressure to path: Barometer-based vehicle tracking. In Proceedings of the 2nd ACM International Conference on Embedded Systems for Energy-Efficient Built Environments, Seoul, Korea, 4–5 November 2015; pp. 65–74. [Google Scholar]
- Sankaran, K.; Zhu, M.; Guo, X.F.; Ananda, A.L.; Chan, M.C.; Peh, L.S. Using mobile phone barometer for low-power transportation context detection. In Proceedings of the 12th ACM Conference on Embedded Network Sensor Systems, Memphis, TN, USA, 3–6 November 2014; pp. 191–205. [Google Scholar]
- Sagawa, K.; Ishihara, T.; Ina, A.; Inooka, H. Classification of human moving patterns using air pressure and acceleration. In Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society (IECON’98 Cat. No. 98CH36200), Aachen, Germany, 31 August–4 September 1998; Volume 2, pp. 1214–1219. [Google Scholar]
- Bolanakis, D.E. Evaluating performance of MEMS barometric sensors in differential altimetry systems. IEEE Aerosp. Electron. Syst. Mag. 2017, 32, 34–39. [Google Scholar]
- Del Rosario, M.B.; Wang, K.; Wang, J.; Liu, Y.; Brodie, M.; Delbaere, K.; Lovell, N.H.; Lord, S.R.; Redmond, S.J. A comparison of activity classification in younger and older cohorts using a smartphone. Physiol. Meas. 2014, 35, 2269. [Google Scholar]
- Wang, C.; Lu, W.; Narayanan, M.R.; Chang, D.C.W.; Lord, S.R.; Redmond, S.J.; Lovell, N.H. Low-power fall detector using triaxial accelerometry and barometric pressure sensing. IEEE Trans. Ind. Inform. 2016, 12, 2302–2311. [Google Scholar]
- Bollmeyer, C.; Esemann, T.; Gehring, H.; Hellbrück, H. Precise indoor altitude estimation based on differential barometric sensing for wireless medical applications. In Proceedings of the 2013 IEEE International Conference on Body Sensor Networks, Cambridge, MA, USA, 6–9 May 2013; pp. 1–6. [Google Scholar]
- Bao, X.; Xiong, Z.; Sheng, S.; Dai, Y.; Bao, S.; Liu, J. Barometer measurement error modeling and correction for UAH altitude tracking. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 3166–3171. [Google Scholar]
- Sabatini, A.; Genovese, V. A sensor fusion method for tracking vertical velocity and height based on inertial and barometric altimeter measurements. Sensors 2014, 14, 13324–13347. [Google Scholar]
- Ghimire, B.; Nickel, C.; Seitz, J. Pedestrian motion state classification using pressure sensors. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcalá de Henares, Spain, 4–7 October 2016; pp. 1–6. [Google Scholar]
- Voleno, M.; Redmond, S.J.; Cerutti, S.; Lovell, N.H. Energy expenditure estimation using triaxial accelerometry and barometric pressure measurement. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 5185–5188. [Google Scholar]
- Moncada-Torres, A.; Leuenberger, K.; Gonzenbach, R.; Luft, A.; Gassert, R. Activity classification based on inertial and barometric pressure sensors at different anatomical locations. Physiol. Meas. 2014, 35, 1245. [Google Scholar]
- Massé, F.; Gonzenbach, R.R.; Arami, A.; Paraschiv-Ionescu, A.; Luft, A.R.; Aminian, K. Improving activity recognition using a wearable barometric pressure sensor in mobility-impaired stroke patients. J. Neuroeng. Rehabil. 2015, 12, 72. [Google Scholar]
- el Achkar, C.M.; Lenoble-Hoskovec, C.; Paraschiv-Ionescu, A.; Major, K.; Büla, C.; Aminian, K. Instrumented shoes for activity classification in the elderly. Gait Posture 2016, 44, 12–17. [Google Scholar]
- Figueira, C.; Matias, R.; Gamboa, H. Body Location Independent Activity Monitoring. In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing, Rome, Italy, 21–23 February 2016; pp. 190–197. [Google Scholar]
- Ejupi, A.; Galang, C.; Aziz, O.; Park, E.J.; Robinovitch, S. Accuracy of a wavelet-based fall detection approach using an accelerometer and a barometric pressure sensor. In Proceedings of the 2017 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Jeju Island, Korea, 11–15 July 2017; pp. 2150–2153. [Google Scholar]
- Monteiro, M.; Martí, A.C. Using smartphone pressure sensors to measure vertical velocities of elevators, stairways, and drones. arXiv preprint 2016, arXiv:1607.00363. [Google Scholar]
- Nam, Y.; Park, J.W. Child activity recognition based on cooperative fusion model of a triaxial accelerometer and a barometric pressure sensor. IEEE J. Biomed. Health Inform. 2013, 17, 420–426. [Google Scholar]
- Loh, D.; Lee, T.J.; Zihajehzadeh, S.; Hoskinson, R.; Park, E.J. Fitness activity classification by using multiclass support vector machines on head-worn sensors. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 502–505. [Google Scholar]
- Anastasopoulou, P.; Tansella, M.; Stumpp, J.; Shammas, L.; Hey, S. Classification of human physical activity and energy expenditure estimation by accelerometry and barometry. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; pp. 6451–6454. [Google Scholar]
- Kim, S.S.; Kim, J.W.; Han, D.S. Floor detection using a barometer sensor in a smartphone. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Ye, H.; Gu, T.; Tao, X.; Lu, J. Scalable floor localization using barometer on smartphone. Wirel. Commun. Mob. Comput. 2016, 16, 2557–2571. [Google Scholar]
- Zhao, F.; Luo, H.; Zhao, X.; Pang, Z.; Park, H. HYFI: Hybrid floor identification based on wireless fingerprinting and barometric pressure. IEEE Trans. Ind. Inform. 2015, 13, 330–341. [Google Scholar]
- Xu, Z.; Wei, J.; Zhu, J.; Yang, W. A robust floor localization method using inertial and barometer measurements. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Kamiya, Y.; Gu, Y.; Kamijo, S. Indoor Positioning in Large Shopping Mall with Context based Map Matching. In Proceedings of the 2019 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 10–12 January 2019; pp. 1–6. [Google Scholar]
- Yi, S.; Mirowski, P.; Ho, T.K.; Pavlovic, V. Pose invariant activity classification for multi-floor indoor localization. In Proceedings of the 2014 22nd International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August 2014; pp. 3505–3510. [Google Scholar]
- Liu, G.; Iwai, M.; Tobe, Y.; Matekenya, D.; Hossain, K.M.A.; Ito, M.; Sezaki, K. Beyond horizontal location context: Measuring elevation using smartphone’s barometer. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing: Adjunct Publication, Seattle, WA, USA, 13–17 September 2014; pp. 459–468. [Google Scholar]
- Kaiser, S.; Lang, C. Detecting elevators and escalators in 3d pedestrian indoor navigation. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcalá de Henares, Spain, 4–7 October 2016; pp. 1–6. [Google Scholar]
- Hyuga, S.; Ito, M.; Iwai, M.; Sezaki, K. Estimate a user’s location using smartphone’s barometer on a subway. In Proceedings of the 5th International Workshop on Mobile Entity Localization and Tracking in GPS-less Environments, Seattle, WA, USA, 3 November 2015; p. 2. [Google Scholar]
- Wannenburg, J.; Malekian, R. Physical activity recognition from smartphone accelerometer data for user context awareness sensing. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 3142–3149. [Google Scholar]
- Li, B.; Harvey, B.; Gallagher, T. Using barometers to determine the height for indoor positioning. In Proceedings of the 2013 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard, France, 28–31 October 2013; pp. 1–7. [Google Scholar]
- Pipelidis, G.; Moslehi Rad, O.; Iwaszczuk, D.; Prehofer, C.; Hugentobler, U. Dynamic Vertical Mapping with Crowdsourced Smartphone Sensor Data. Sensors 2018, 18, 480. [Google Scholar]
- Tachikawa, M.; Maekawa, T.; Matsushita, Y. Predicting location semantics combining active and passive sensing with environment-independent classifier. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; pp. 220–231. [Google Scholar]
- Son, Y.; Oh, S. A barometer-IMU fusion method for vertical velocity and height estimation. In Proceedings of the 2015 IEEE SENSORS, Busan, Korea, 1–4 November 2015; pp. 1–4. [Google Scholar]
- Ohtaki, Y.; Susumago, M.; Suzuki, A.; Sagawa, K.; Nagatomi, R.; Inooka, H. Automatic classification of ambulatory movements and evaluation of energy consumptions utilizing accelerometers and a barometer. Microsyst. Technol. 2005, 11, 1034–1040. [Google Scholar] [CrossRef]
- Ichikari, R.; Ruiz, L.C.M.; Kourogi, M.; Kurata, T.; Kitagawa, T.; Yoshii, S. Indoor floor-level detection by collectively decomposing factors of atmospheric pressure. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–11. [Google Scholar]
- Li, Y.; Gao, Z.; He, Z.; Zhang, P.; Chen, R.; El-Sheimy, N. Multi-sensor multi-floor 3D localization with robust floor detection. IEEE Access 2018, 6, 76689–76699. [Google Scholar]
- Atmospheric Pressure. 2019. Available online: https://www.britannica.com/science/atmospheric-pressure (accessed on 20 November 2019).
- Cenedese, C.; Smith, P.J. Atmospheric Pressure and Wind. 2019. Available online: https://www.britannica.com/science/climate-meteorology/Atmospheric-pressure-and-wind (accessed on 20 January 2020).
- Le Blancq, F. Diurnal pressure variation: The atmospheric tide. Weather 2011, 66, 306–307. [Google Scholar] [CrossRef]
- Giles, B. The atmospheric tide: An historical perspective. Weather 2012, 67, 51–53. [Google Scholar] [CrossRef]
- Trane. Commercial Building Pressurization. 2002. Available online: https://www.airtight.ai/wp-content/uploads/2019/07/Commercial-Building-Pressurization-by-Trane.pdf (accessed on 26 November 2020).
- Hendiger, J.; Chludzińska, M.; Ziętek, P. Influence of the pressure difference and door swing on heavy contaminants migration between rooms. PLoS ONE 2016, 11, e0155159. [Google Scholar]
- Lstiburek, J.; Pressnail, K.; Timusk, J. Air pressure and building envelopes. J. Therm. Envel. Build. Sci. 2002, 26, 53–91. [Google Scholar]
- Zhang, N.; Zhou, D. Numerical Analysis of the Pressure Variation in Subway Tunnel When an On-Fire Train Runs at Different Speed. In Proceedings of the 2016 World Congress on Advances in Civil, Environmental, and Materials Research (ACEM16), Jeju Island, Korea, 28 August–1 September 2016; pp. 1–6. [Google Scholar]
- Reinke, P.; Flueckiger, M.; Wicht, T. Aerodynamics and Ventilation in Rail Tunnels. May 2015. Available online: https://www.tunneltalk.com/TunnelTECH-May2015-Aerodynamics-and-ventilation-in-rail-tunnels-civil-measures.php (accessed on 26 November 2020).
- Barnes, J.D.; Brush, E.R.; Newmark, M.S.; Ungar, E.E. Dynamic Pressures on Tunnel Roofs due to Vehicle Passages. Sound Vib. 2018, 52, 6–8. [Google Scholar]
- Wilhelm, E.; Siby, S.; Zhou, Y.; Ashok, X.J.S.; Jayasuriya, M.; Foong, S.; Kee, J.; Wood, K.L.; Tippenhauer, N.O. Wearable environmental sensors and infrastructure for mobile large-scale urban deployment. IEEE Sens. J. 2016, 16, 8111–8123. [Google Scholar]
- Young, D.F.; Munson, B.R.; Okiishi, T.H.; Huebsch, W.W. A Brief Introduction to Fluid Mechanics; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Why Does Atmospheric Pressure Change with Altitude? Available online: https://www.npl.co.uk/resources/q-a/atmospheric-altitude-pressure-changes (accessed on 20 January 2020).
- Gonzalez, M.C.; Hidalgo, C.A.; Barabasi, A.L. Understanding individual human mobility patterns. Nature 2008, 453, 779–782. [Google Scholar]
- Barbosa, H.; Barthelemy, M.; Ghoshal, G.; James, C.R.; Lenormand, M.; Louail, T.; Menezes, R.; Ramasco, J.J.; Simini, F.; Tomasini, M. Human mobility: Models and applications. Phys. Rep. 2018, 734, 1–74. [Google Scholar]
- De Montjoye, Y.A.; Hidalgo, C.A.; Verleysen, M.; Blondel, V.D. Unique in the Crowd: The privacy bounds of human mobility. Sci. Rep. 2013, 3, 1–5. [Google Scholar] [CrossRef]
- Zang, H.; Bolot, J. Anonymization of location data does not work: A large-scale measurement study. In Proceedings of the 17th Annual International Conference on Mobile Computing and Networking, Las Vegas, NV, USA, 19–23 September 2011; pp. 145–156. [Google Scholar]
- Armstrong, M.P.; Rushton, G.; Zimmerman, D.L. Geographically masking health data to preserve confidentiality. Stat. Med. 1999, 18, 497–525. [Google Scholar]
- Kwan, M.P.; Casas, I.; Schmitz, B. Protection of geoprivacy and accuracy of spatial information: How effective are geographical masks? Cartogr. Int. J. Geogr. Inf. Geovis. 2004, 39, 15–28. [Google Scholar]
- Armstrong, M.P.; Ruggles, A.J. Geographic information technologies and personal privacy. Cartogr. Int. J. Geogr. Inf. Geovis. 2005, 40, 63–73. [Google Scholar]
- Gao, S.; Rao, J.; Liu, X.; Kang, Y.; Huang, Q.; App, J. Exploring the effectiveness of geomasking techniques for protecting the geoprivacy of Twitter users. J. Spat. Inf. Sci. 2019, 2019, 105–129. [Google Scholar]





| Application | Description | Reference |
|---|---|---|
| Human mobility | Tracking movement of people | [28,67,68,69,84,87,101,104] |
| Health monitoring | Tracking elderly, patients, or healthy people for health-related activities. | [44,75,76,83,91,93,95,97,112,112] |
| Vehicle tracking | Tracking movement of people riding vehicles such as cars, buses, trains, etc. | [77,78,79,106] |
| Building monitoring | Monitoring the movement of people through the changes in building environments. | [66,68,71,74,84,99,108,121] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manivannan, A.; Chin, W.C.B.; Barrat, A.; Bouffanais, R. On the Challenges and Potential of Using Barometric Sensors to Track Human Activity. Sensors 2020, 20, 6786. https://doi.org/10.3390/s20236786
Manivannan A, Chin WCB, Barrat A, Bouffanais R. On the Challenges and Potential of Using Barometric Sensors to Track Human Activity. Sensors. 2020; 20(23):6786. https://doi.org/10.3390/s20236786
Chicago/Turabian StyleManivannan, Ajaykumar, Wei Chien Benny Chin, Alain Barrat, and Roland Bouffanais. 2020. "On the Challenges and Potential of Using Barometric Sensors to Track Human Activity" Sensors 20, no. 23: 6786. https://doi.org/10.3390/s20236786
APA StyleManivannan, A., Chin, W. C. B., Barrat, A., & Bouffanais, R. (2020). On the Challenges and Potential of Using Barometric Sensors to Track Human Activity. Sensors, 20(23), 6786. https://doi.org/10.3390/s20236786