Multirate Audio-Integrated Feedback Active Noise Control Systems Using Decimated-Band Adaptive Filters for Reducing Narrowband Noises †



Abstract
1. Introduction
2. Audio-Integrated Feedback Active Noise Control (AFANC) Systems
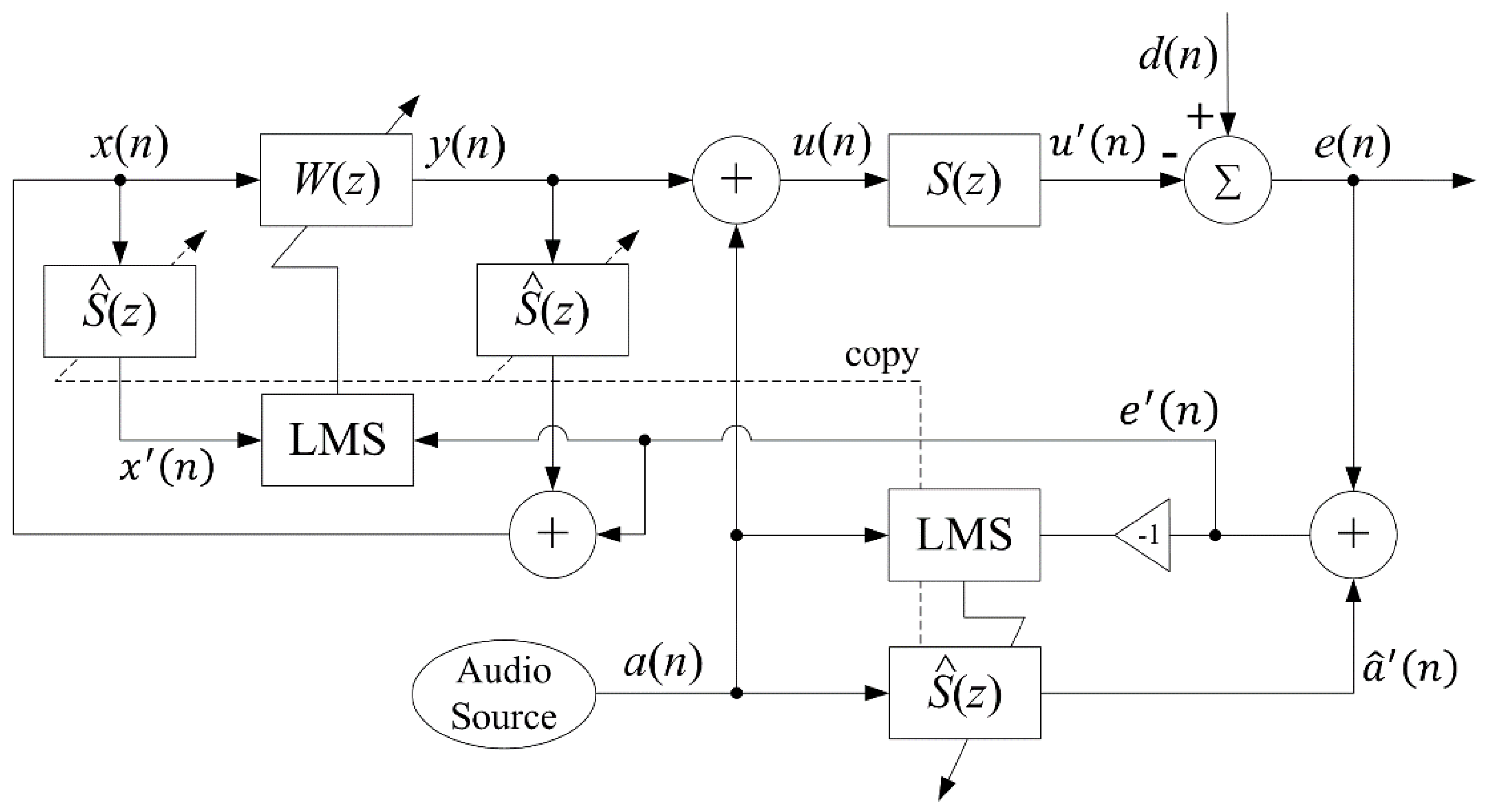
2.1. Conventional Algorithm Using Fullband Adaptive Filters
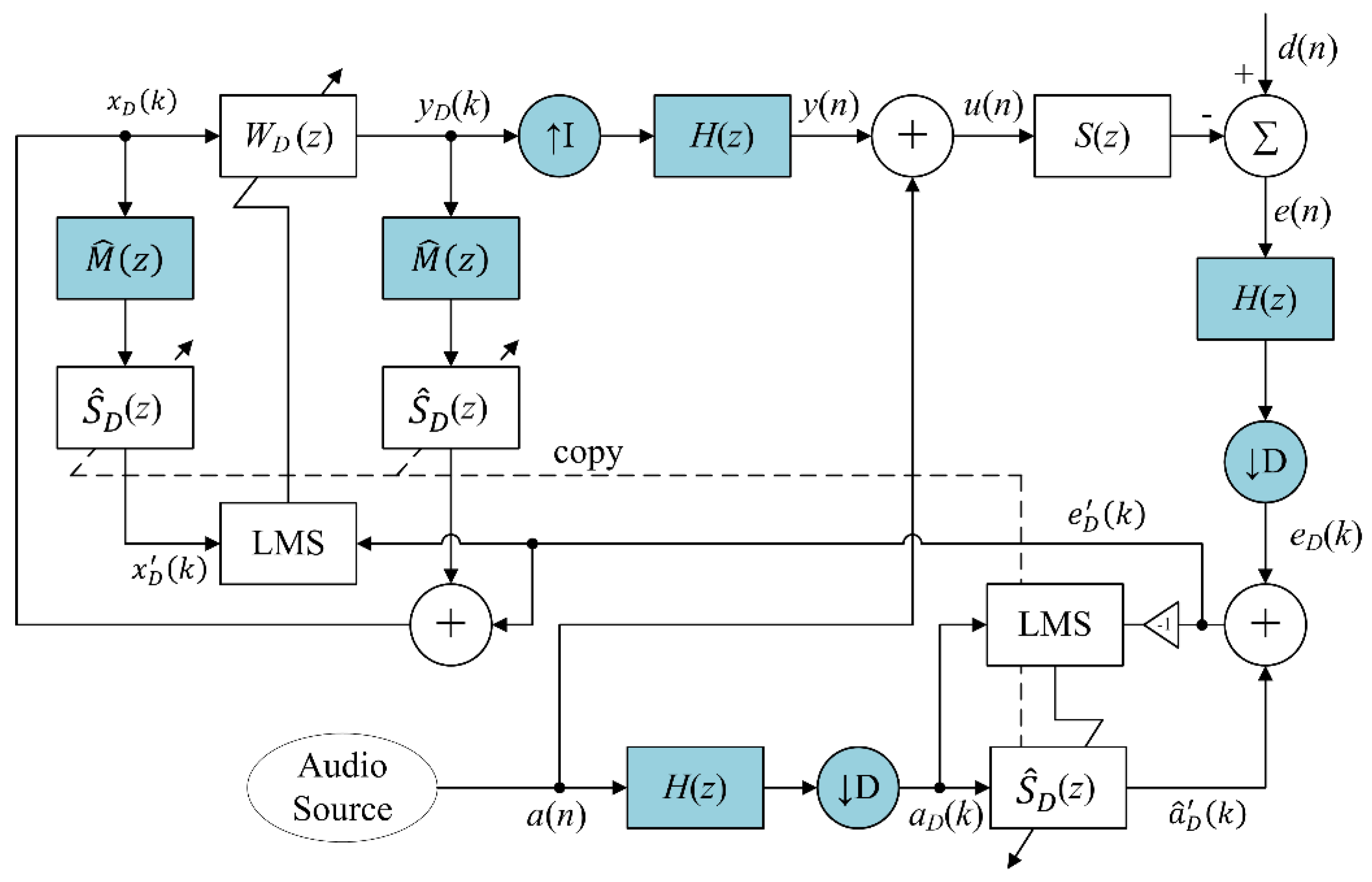
2.2. Proposed Algorithm Using Decimated-band Adaptive Filters (DAFs)
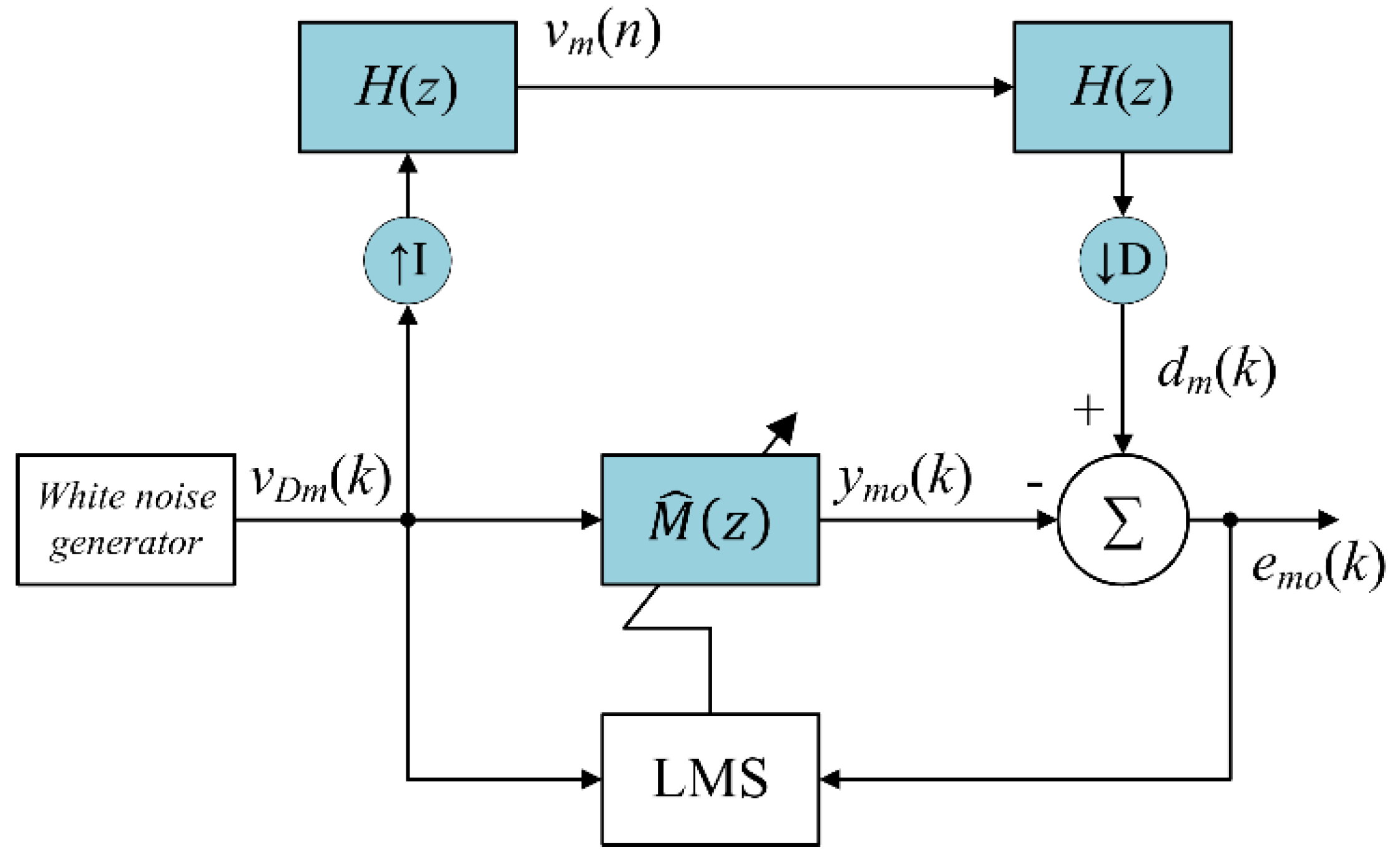
2.2.1. Off-Line Multirate Transfer Function Modeling Algorithm
2.3. Performance Analysis of Conventional and Proposed AFANC Systems
2.3.1. Computational Complexity
2.3.2. Convergence Analysis
3. Results and Discussion
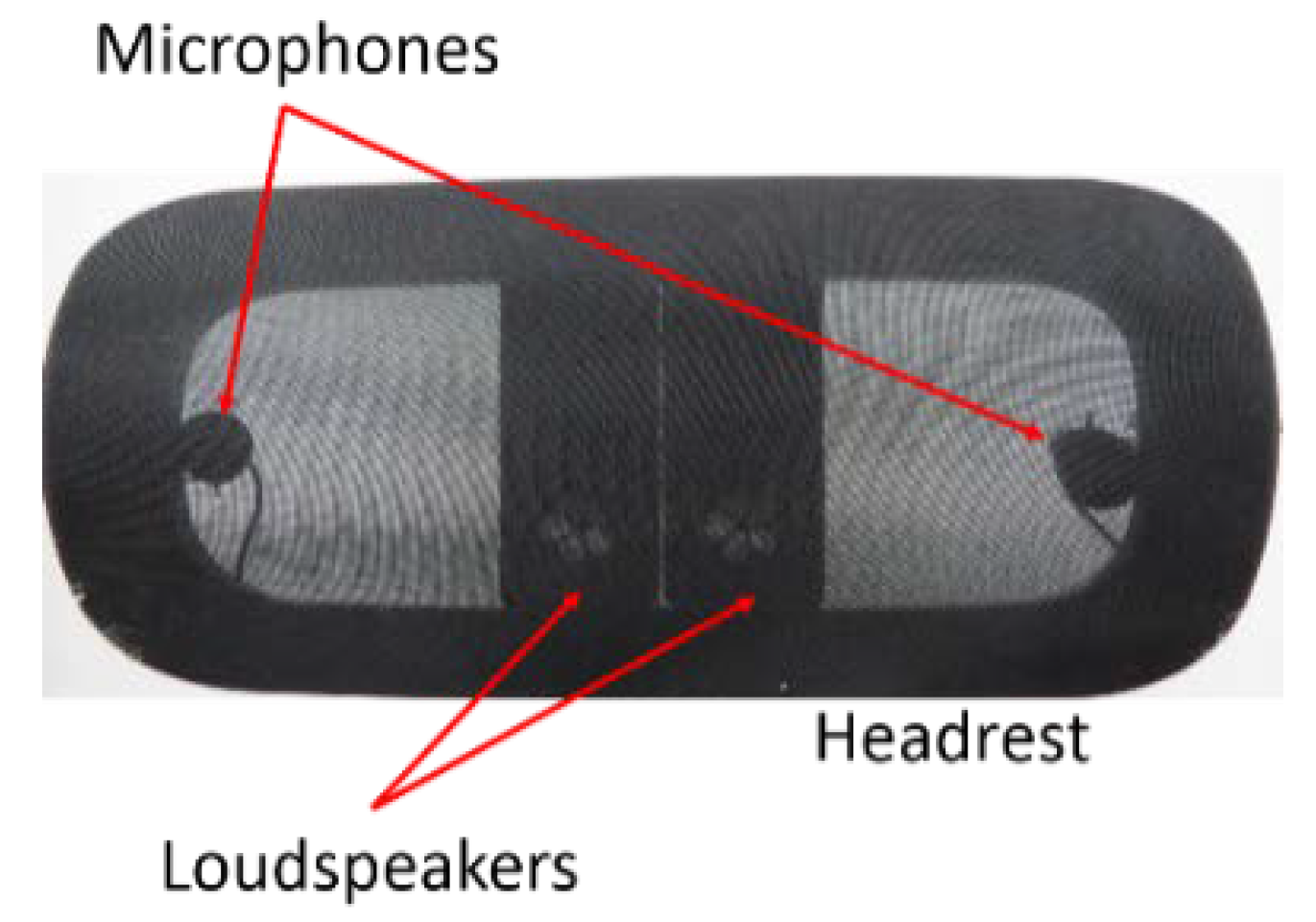
3.1. Experiment Setup
3.2. Computer Simulations
3.2.1. Off-Line Secondary-Path Modeling Results
3.2.2. Off-Line Multirate Transfer Function Modeling Results
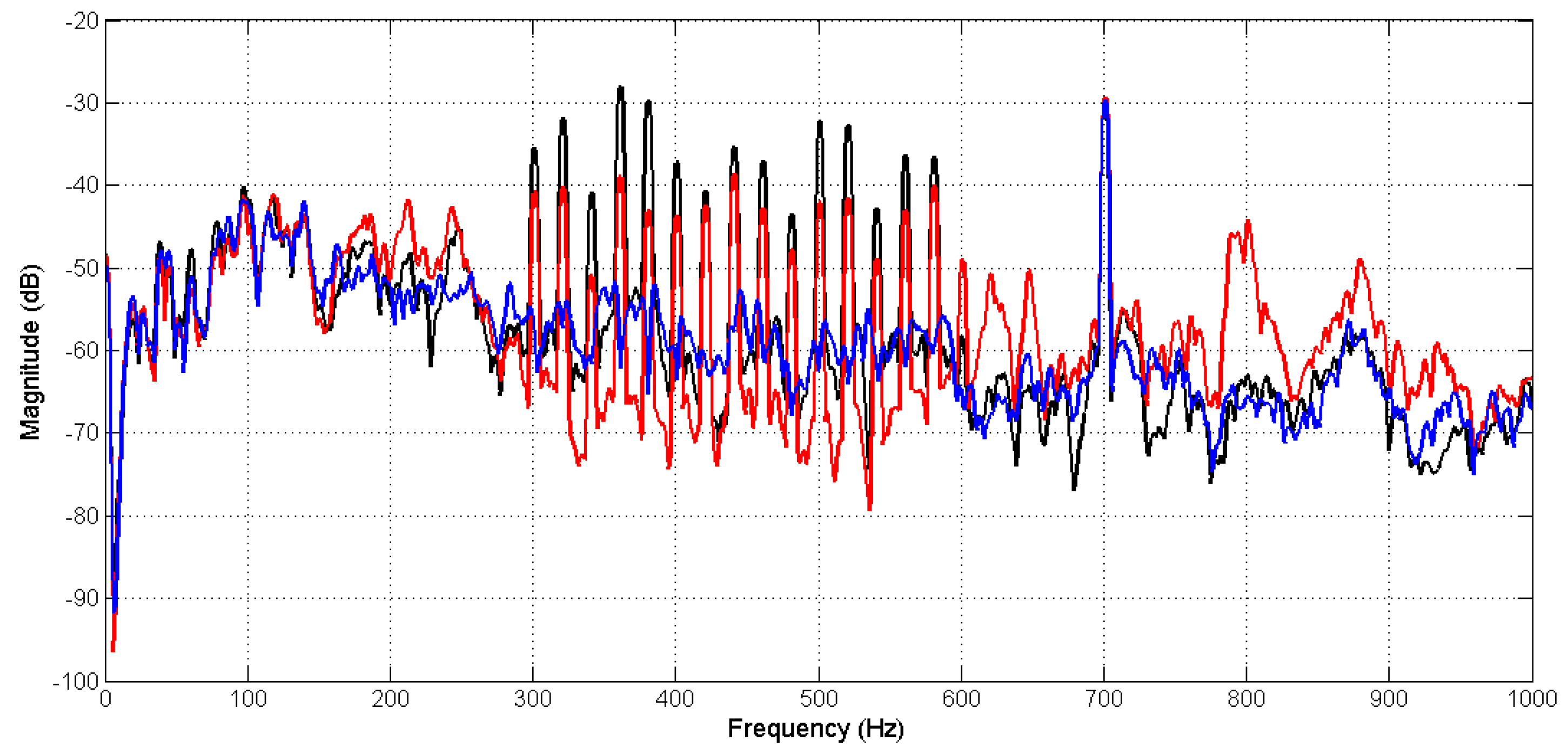
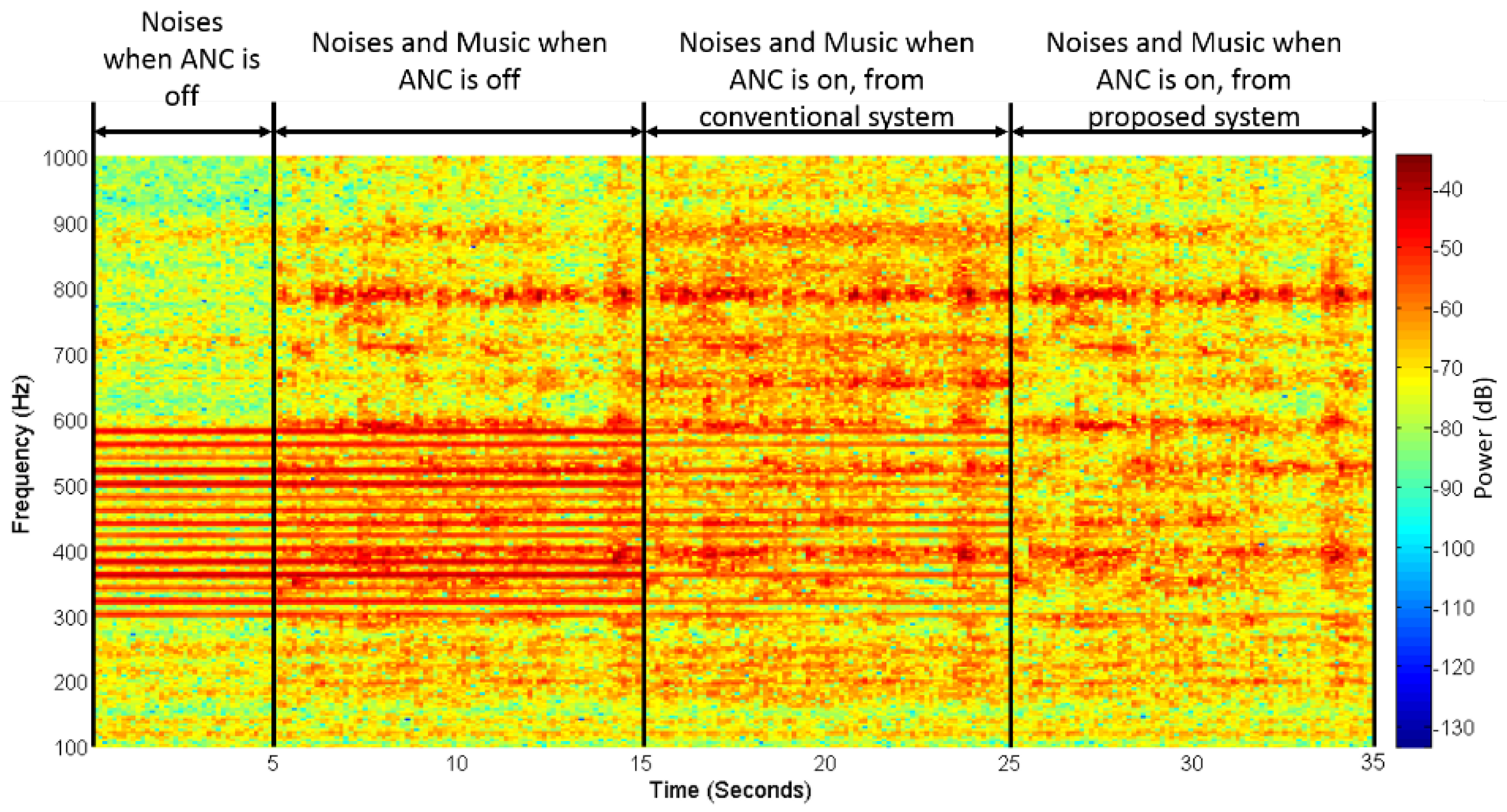
3.2.3. Noise Reduction Results
3.3. Real-Time Experiments
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Decimations and Interpolations
Appendix B. Filter Delay Estimation
References
- World Health Organization. Burden of Disease from Environmental Noise-Quantification of Healthy Life Years Lost in Europe. Available online: https://www.who.int/quantifying_ehimpacts/publications/e94888.pdf (accessed on 9 November 2020).
- Khajenasiri, F.; Zamanian, A.; Zamanian, Z. The Effect of Exposure to High Noise Levels on the Performance and Rate of Error in Manual Activities. Electron. Physician 2016, 8, 2088–2093. [Google Scholar] [CrossRef]
- Department for Environment, Food, & Rural Affairs of United Kingdom. Noise Pollution-Economic Analysis. Available online: https://www.gov.uk/guidance/noise-pollution-economic-analysis (accessed on 10 November 2020).
- Swinburn, T.K.; Hammer, M.S.; Neitzel, R.L. Valuing Quiet: An Economic Assessment of U.S. Environmental Noise as a Cardiovascular Health Hazard. Am. J. Prev. Med. 2015, 49, 345–353. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. Environmental Noise Guidelines for the European Region. Available online: https://www.euro.who.int/__data/assets/pdf_file/0008/383921/noise-guidelines-eng.pdf (accessed on 9 November 2020).
- Cassina, L.; Fredianelli, L.; Menichini, I.; Chiari, C.; Licitra, G. Audio-Visual Preferences and Tranquillity Ratings in Urban Areas. Environments 2018, 5, 1. [Google Scholar] [CrossRef]
- Thompson, M. Beyond Unwanted Sound: Noise, Affect and Aesthetic Moralism; Bloomsbury: New York, NY, USA, 2017. [Google Scholar]
- Nilsson, M.; Alvarsson, J.; Rådsten-Ekman, M.; Bolin, K. Auditory Masking of Wanted and Unwanted Sounds in a City Park. Noise Control. Eng. J. 2010, 58, 524–531. [Google Scholar] [CrossRef]
- Song, E.-S.; Lim, Y.-J.; Lee, J.; Moon, J.-B.; Kim, B. Application of Soundproofing Materials for Noise Reduction in Dental CAD/CAM Milling Machines. Appl. Sci. 2020, 10, 2768. [Google Scholar] [CrossRef]
- Wang, S.; Wang, X. Modeling and Analysis of the Effects of Noise Barrier Shape and Inflow Conditions on Highway Automobiles Emission Dispersion. Fluids 2019, 4, 151. [Google Scholar] [CrossRef]
- Pardo-Quiles, D.; Rodríguez, J.-V.; Molina-García-Pardo, J.-M.; Juan-Llácer, L. Traffic Noise Mitigation Using Single and Double Barrier Caps of Different Shapes for an Extended Frequency Range. Appl. Sci. 2020, 10, 5746. [Google Scholar] [CrossRef]
- Huang, X.; Zou, H.; Qiu, X. Effects of the Top Edge Impedance on Sound Barrier Diffraction. Appl. Sci. 2020, 10, 6042. [Google Scholar] [CrossRef]
- Elliott, S.J.; Nelson, P.A. Active noise control. IEEE Signal. Process. Mag. 1993, 10, 12–35. [Google Scholar] [CrossRef]
- Kuo, S.M.; Morgan, D.R. Active Noise Control Systems: Algorithms and DSP Implementation; Wiley: New York, NY, USA, 1996. [Google Scholar]
- Nelson, P.A.; Elliott, S.J. Active Control of Sound; Academic: New York, NY, USA, 1992. [Google Scholar]
- Liang, K.; Hu, J. An Open-Loop Pole–Zero Placement Method for Active Noise Control Headphones. IEEE Trans. Contr. Syst. Technol. 2007, 25, 1278–1283. [Google Scholar] [CrossRef]
- Pawełczyk, M. Analogue Active Noise Control. Appl. Acoust. 2002, 63, 1193–1213. [Google Scholar] [CrossRef]
- Yu, S.; Hu, J. Controller Design for Active Noise Cancellation Headphones using Experimental Raw Data. IEEE/ASME Trans. Mechatron. 2001, 6, 483–490. [Google Scholar]
- Kim, B.; Yoon, J.-Y. Modified LMS Strategies Using Internal Model Control for Active Noise and Vibration Control Systems. Appl. Sci. 2018, 8, 1007. [Google Scholar] [CrossRef]
- Wu, L.; Qiu, X.; Guo, Y. A Generalized Leaky FxLMS Algorithm for Tuning the Waterbed Effect of Feedback Active Noise Control Systems. Mech. Syst. Signal. Process. 2018, 106, 13–23. [Google Scholar] [CrossRef]
- López, J.M.; Alonso, J.; Asensio, C.; Pavón, I.; Gascó, L.; de Arcas, G. A Digital Signal Processor Based Acoustic Sensor for Outdoor Noise Monitoring in Smart Cities. Sensors 2020, 20, 605. [Google Scholar] [CrossRef] [PubMed]
- Luo, L.; Qin, H.; Song, X.; Wang, M.; Qiu, H.; Zhou, Z. Wireless Sensor Networks for Noise Measurement and Acoustic Event Recognitions in Urban Environments. Sensors 2020, 20, 2093. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.-K.; Lee, S.; Back, J.; Shin, T. A New Method for Active Cancellation of Engine Order Noise in a Passenger Car. Appl. Sci. 2018, 8, 1394. [Google Scholar] [CrossRef]
- Flor, D.; Pena, D.; Pena, L.; de Sousa, V.A., Jr.; Martins, A. Characterization of Noise Level inside a Vehicle under Different Conditions. Sensors 2020, 20, 2471. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Thomas, P.J. Acoustic Improvement of Stator–Rotor Interaction with Nonuniform Trailing Edge Blowing. Appl. Sci. 2018, 8, 994. [Google Scholar] [CrossRef]
- Kuo, S.M.; Chuang, H.; Mallela, P.P. Integrated Automotive Signal Processing and Audio System. Ieee Trans. Consum. Electron. 1993, 39, 522–532. [Google Scholar] [CrossRef]
- Gan, W.S.; Kuo, S.M. An Integrated Audio and Active Noise Control Headset. IEEE Trans. Consum. Electron. 2001, 48, 242–247. [Google Scholar] [CrossRef]
- Kajikawa, Y. Integration of Active Noise Control and Other Acoustic Signal Processing Techniques. In Proceedings of the 2014 IEEE Asia Pacific Conference on Circuits and Systems (APCCAS), Ishigaki, Japan, 17–20 November 2014; pp. 451–454. [Google Scholar]
- Chen, Y.R.; Chang, C.Y.; Kuo, S.M. Active Noise Control and Secondary Path Modeling Algorithms for Earphones. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 246–251. [Google Scholar]
- Antonius, S.; Chang, C.Y.; Sen, M.K. Multirate audio-integrated adaptive feedback ANC systems. In Proceedings of the 2016 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Jeju, Korea, 13–16 December 2016. [Google Scholar]
- Lee, K.; Gan, W.; Kuo, S.M. Subband Adaptive Filtering: Theory and Implementation; Wiley: West Sussex, UK, 2009. [Google Scholar]
- Audio Engineering Society. AES5-2018: AES Recommended Practice for Professional Digital Audio—Preferred Sampling Frequencies for Applications Employing Pulse-Code Modulation (Revision of AES5-2003). Available online: https://www.aes.org/publications/standards/search.cfm?docID=14 (accessed on 14 November 2020).
- Wang, L.V.; Gan, W.; Khong, A.W.H.; Kuo, S.M. Convergence Analysis of Narrowband Feedback Active Noise Control System with Imperfect Secondary Path Estimation. IEEE Trans. Audio Speech Lang. Process. 2013, 21, 2403–2411. [Google Scholar] [CrossRef]
- Ardekani, I.T.; Abdulla, W.H. Theoretical Convergence Analysis of FxLMS Algorithm. Signal. Process. 2010, 90, 3046–3055. [Google Scholar] [CrossRef]
- Siswanto, A.; Chang, C.Y.; Kuo, S.M. Active Noise Control for Headrests. In Proceedings of the 2015 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Hong Kong, China, 16–19 December 2015; pp. 688–692. [Google Scholar]
- Kuo, S.M.; Lee, B.H.; Tian, W. Real-Time Digital Signal Processing: Fundamentals, Implementations and Applications; Wiley: West Sussex, UK, 2013. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AFANC System | Filter | Length | Computation | |
|---|---|---|---|---|
| Multiplications | Additions | |||
| Conventional | ||||
| Proposed | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siswanto, A.; Chang, C.-Y.; Kuo, S.M. Multirate Audio-Integrated Feedback Active Noise Control Systems Using Decimated-Band Adaptive Filters for Reducing Narrowband Noises. Sensors 2020, 20, 6693. https://doi.org/10.3390/s20226693
Siswanto A, Chang C-Y, Kuo SM. Multirate Audio-Integrated Feedback Active Noise Control Systems Using Decimated-Band Adaptive Filters for Reducing Narrowband Noises. Sensors. 2020; 20(22):6693. https://doi.org/10.3390/s20226693
Chicago/Turabian StyleSiswanto, Antonius, Cheng-Yuan Chang, and Sen M. Kuo. 2020. "Multirate Audio-Integrated Feedback Active Noise Control Systems Using Decimated-Band Adaptive Filters for Reducing Narrowband Noises" Sensors 20, no. 22: 6693. https://doi.org/10.3390/s20226693
APA StyleSiswanto, A., Chang, C.-Y., & Kuo, S. M. (2020). Multirate Audio-Integrated Feedback Active Noise Control Systems Using Decimated-Band Adaptive Filters for Reducing Narrowband Noises. Sensors, 20(22), 6693. https://doi.org/10.3390/s20226693