Indoor Localization Based on Infrared Angle of Arrival Sensor Network



Abstract
1. Introduction
1.1. Related Work: Indoor Localization Methods and Solutions
1.1.1. Systems Using RF Signal
1.1.2. Systems Using Light Sources
1.1.3. Infrastructure-Free Systems
1.2. The Overview of the Proposed Solution
- Novel IR AoA sensor, made of inexpensive off-the-shelf components, enabling AoA estimation with an error around 1°,
- Wireless sensor network, based on the proposed IR AoA sensor, which provides infrastructural support for real-time navigation,
- Localization strategy/method/algorithm, utilizing the proposed WSN and a spatial context (aisle graph), with suitable localization accuracy,
- Supermarket navigation model based on shelves graph and aisles graph,
- Server, API, and client applications suite, demonstrating both the features and the look-and-feel of the proposed system.
2. Materials and Methods
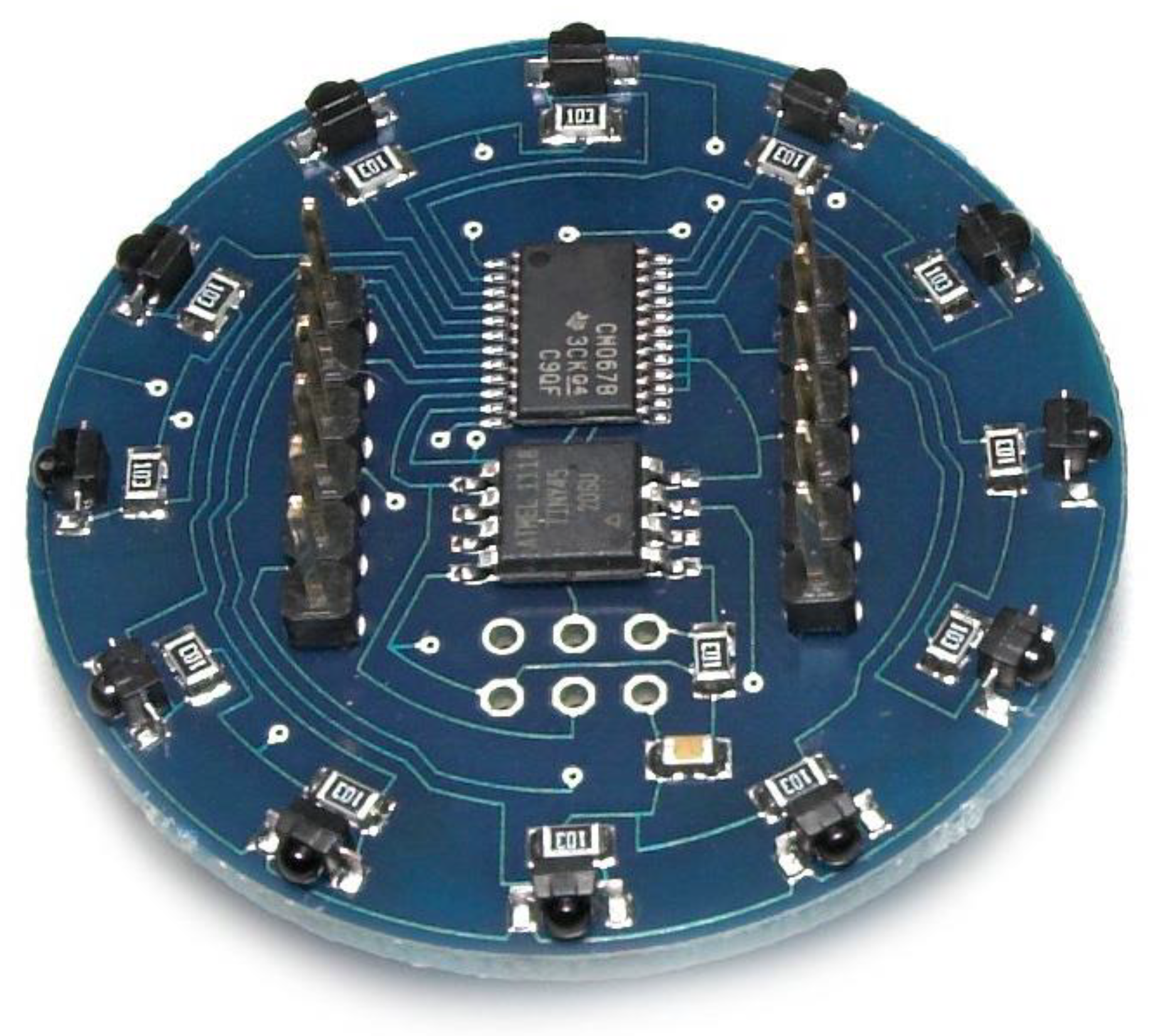
2.1. Angle-of-Arrival Sensor
2.1.1. Design
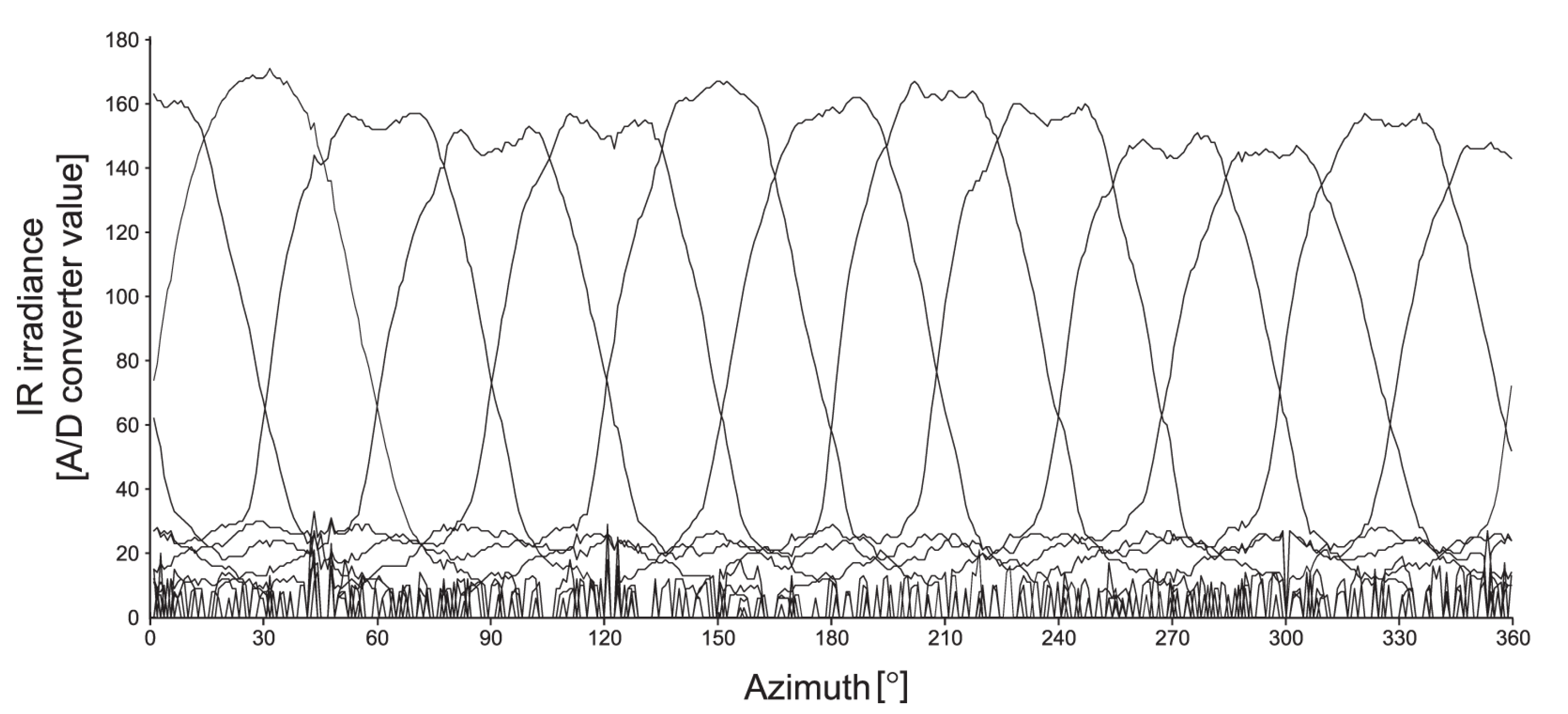
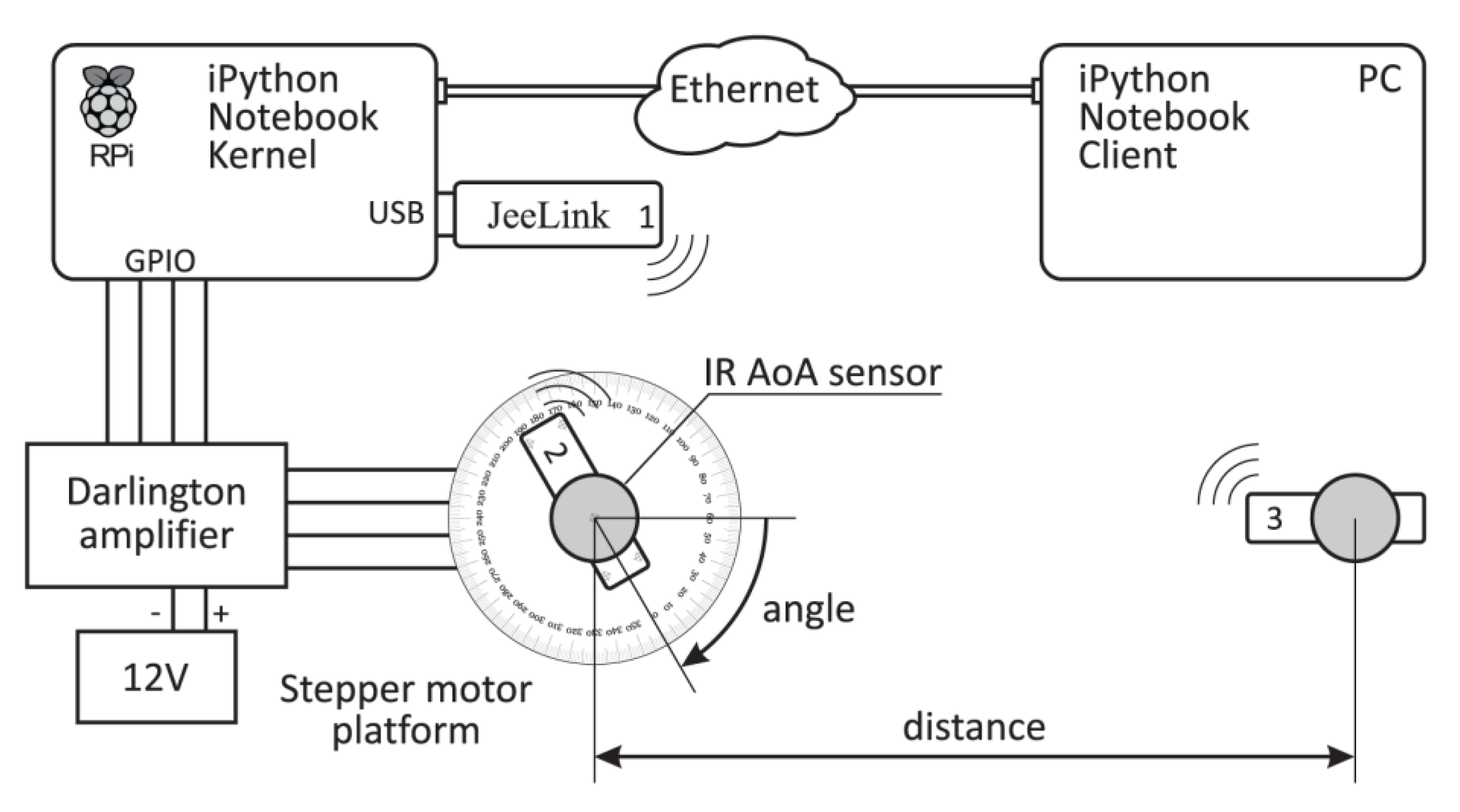
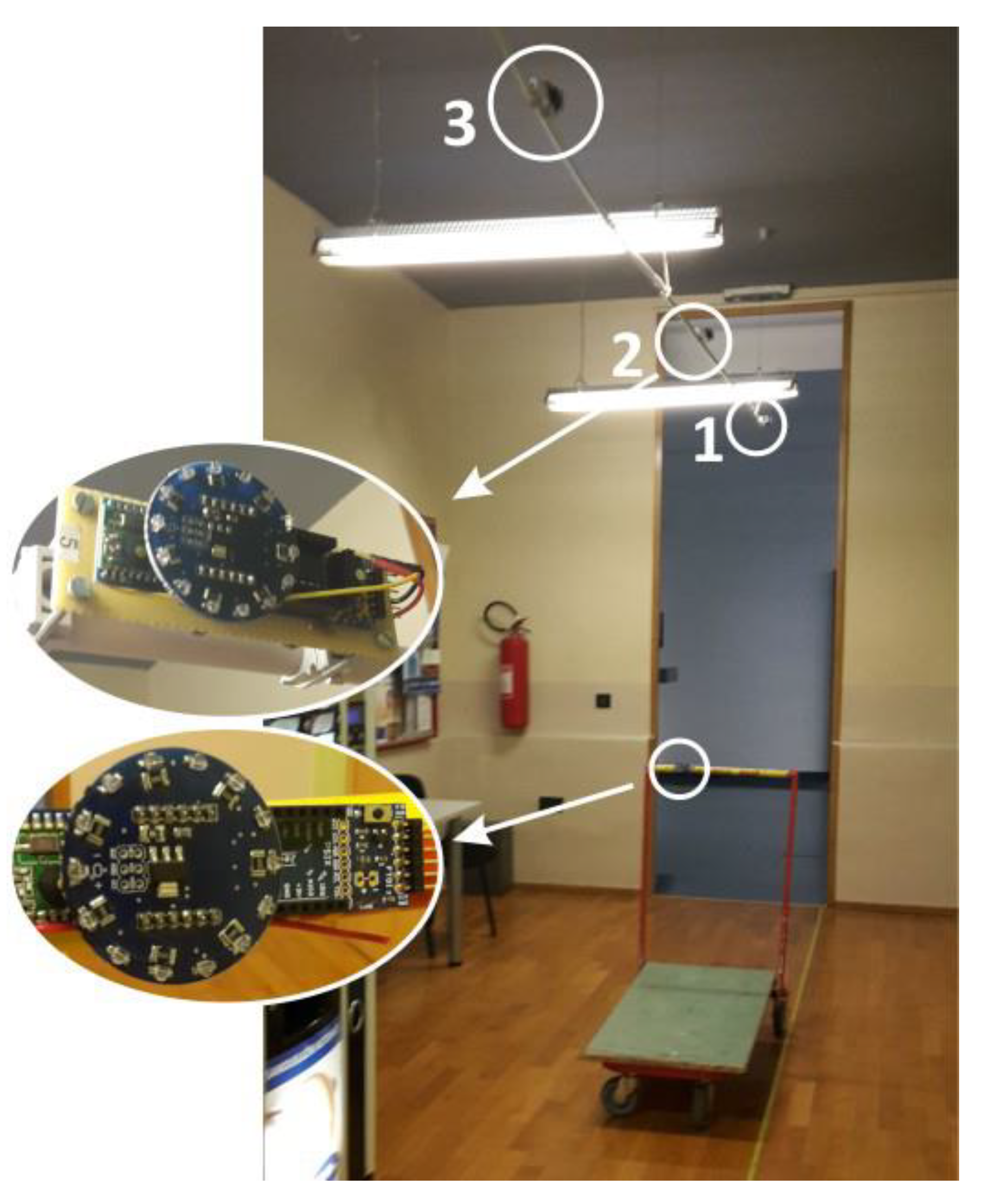
2.1.2. Calibration
- The JeeLink node, in the scheme labeled as node 1, serves as a gateway: to send commands to nodes 2 and 3, and to receive measured data from node 2.
- Node 2 is mounted on a rotating platform and attached to the sensor being calibrated.
- Node 3 is an infrared transmitter, i.e., it serves as a controlled IR radiation source with known distance and AoA relative to node 2.
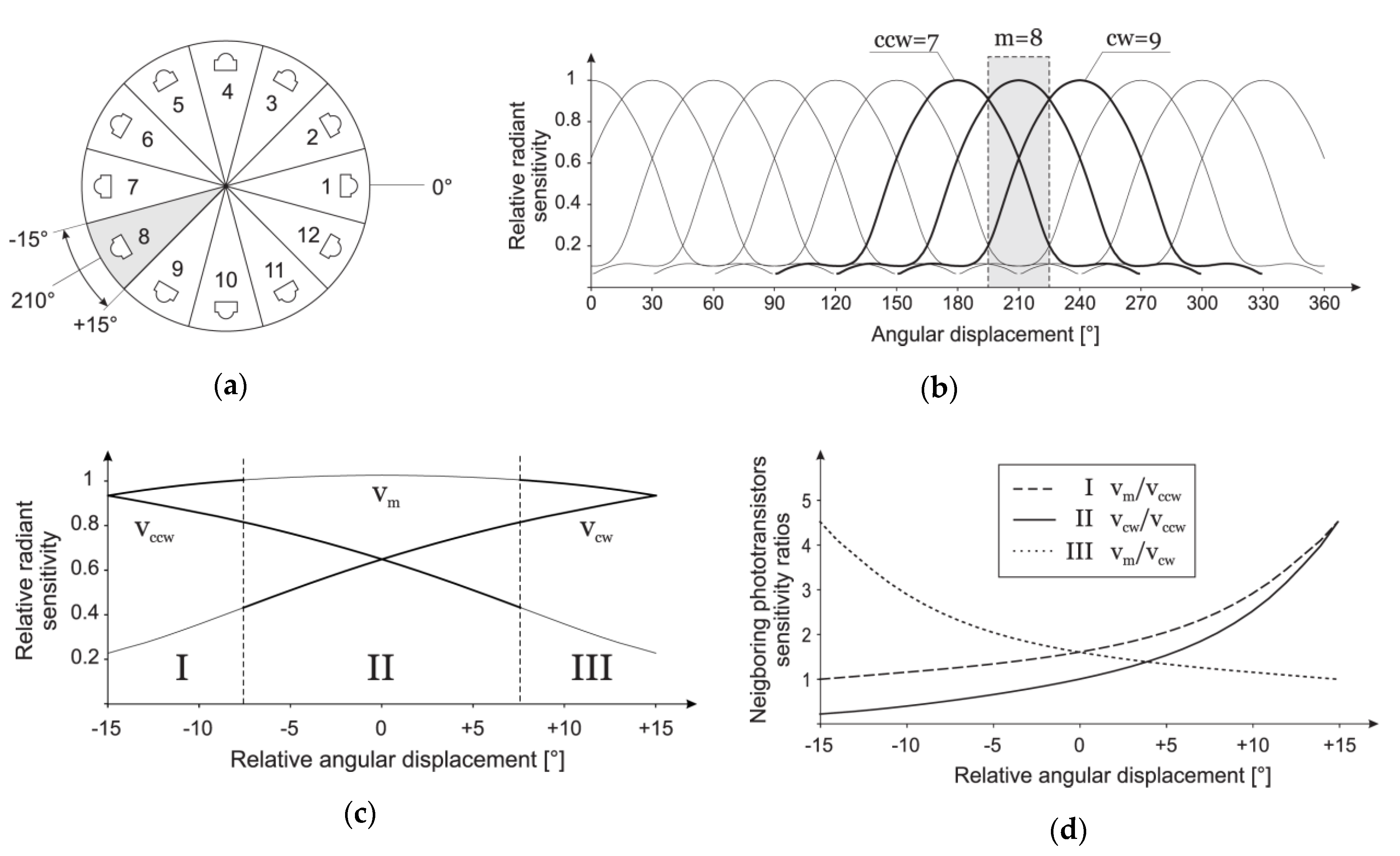
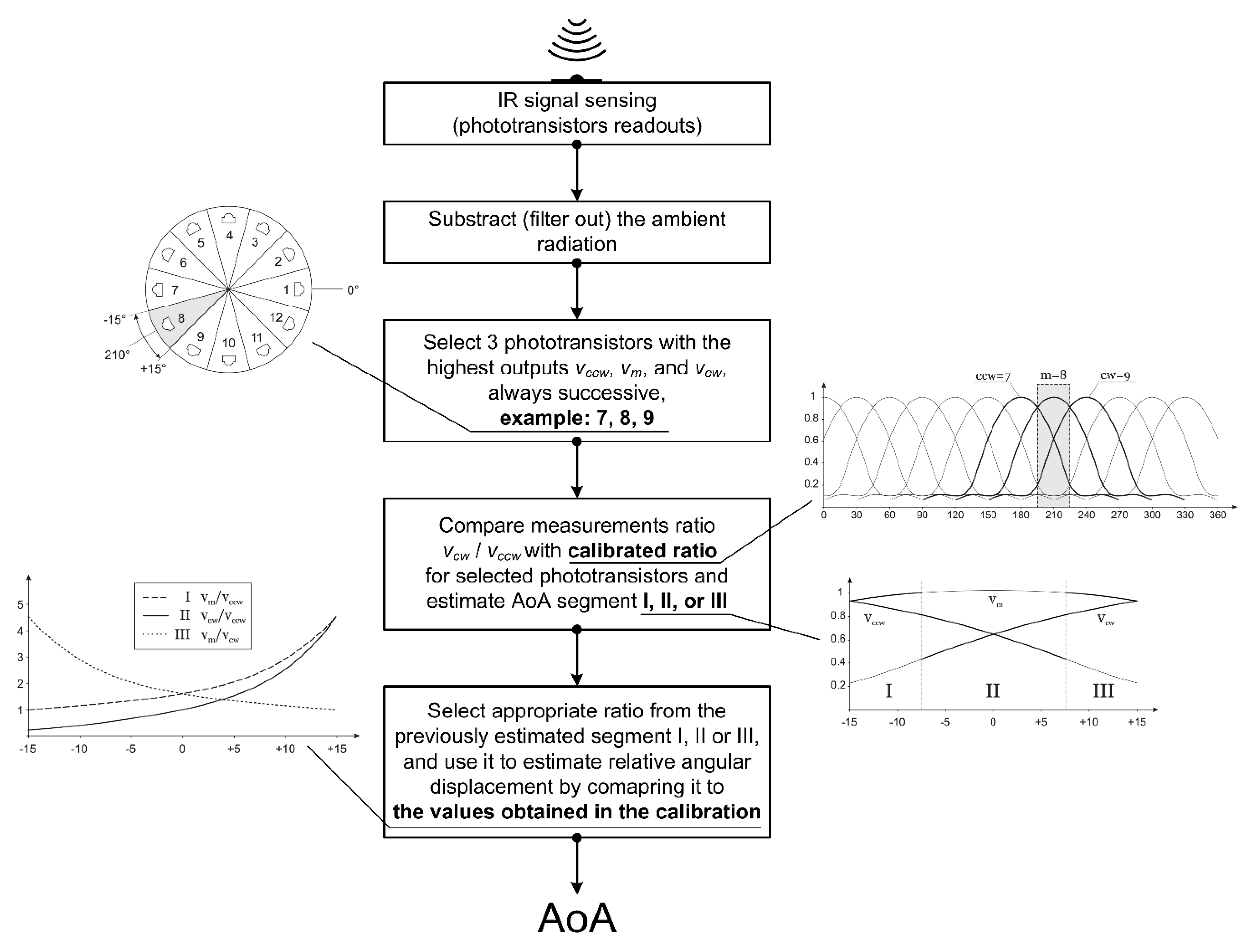
2.1.3. Estimation Algorithm
2.2. Showcase Application: Supermarket Navigation
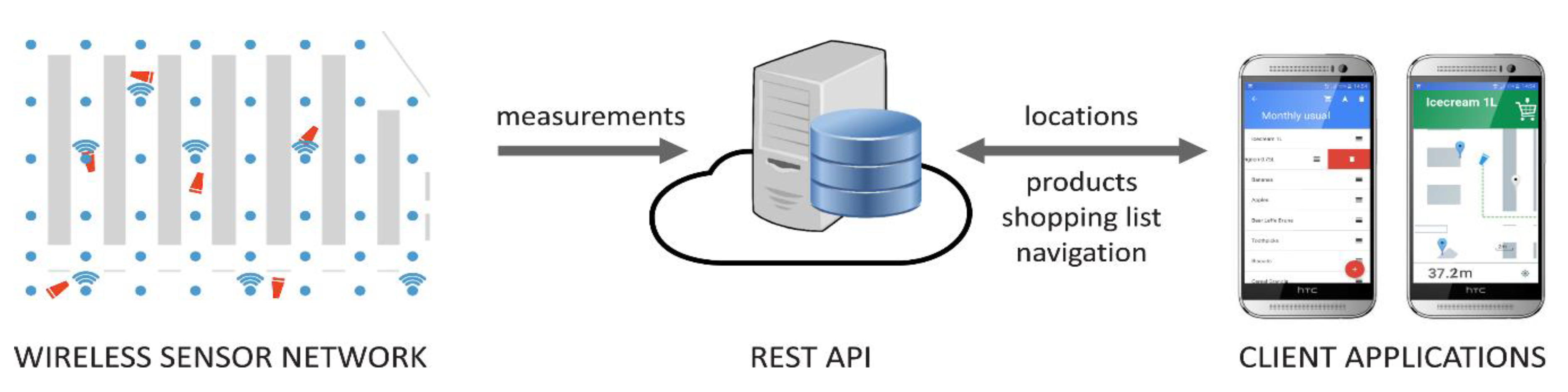
2.2.1. Wireless Sensor Network
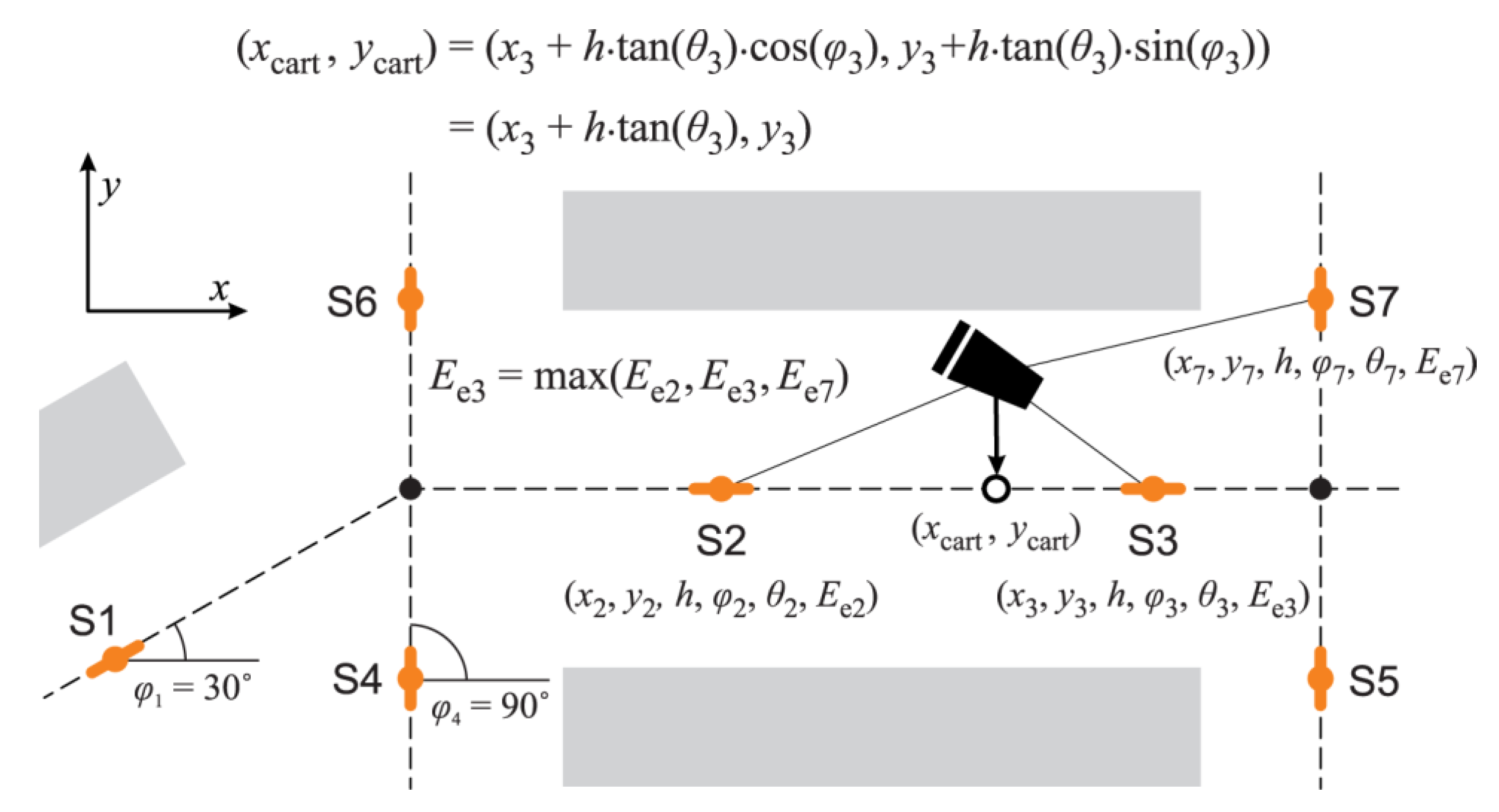
- Select measurement → from all measurements in the set, pick the one with the highest maximum measured irradiance Eei. This step is based on the simple heuristic assuming that the highest irradiance measurement correlates with the lowest distance between the transmitter and the sensor, and, more importantly, with the lowest geometric dilution of precision (GDOP).
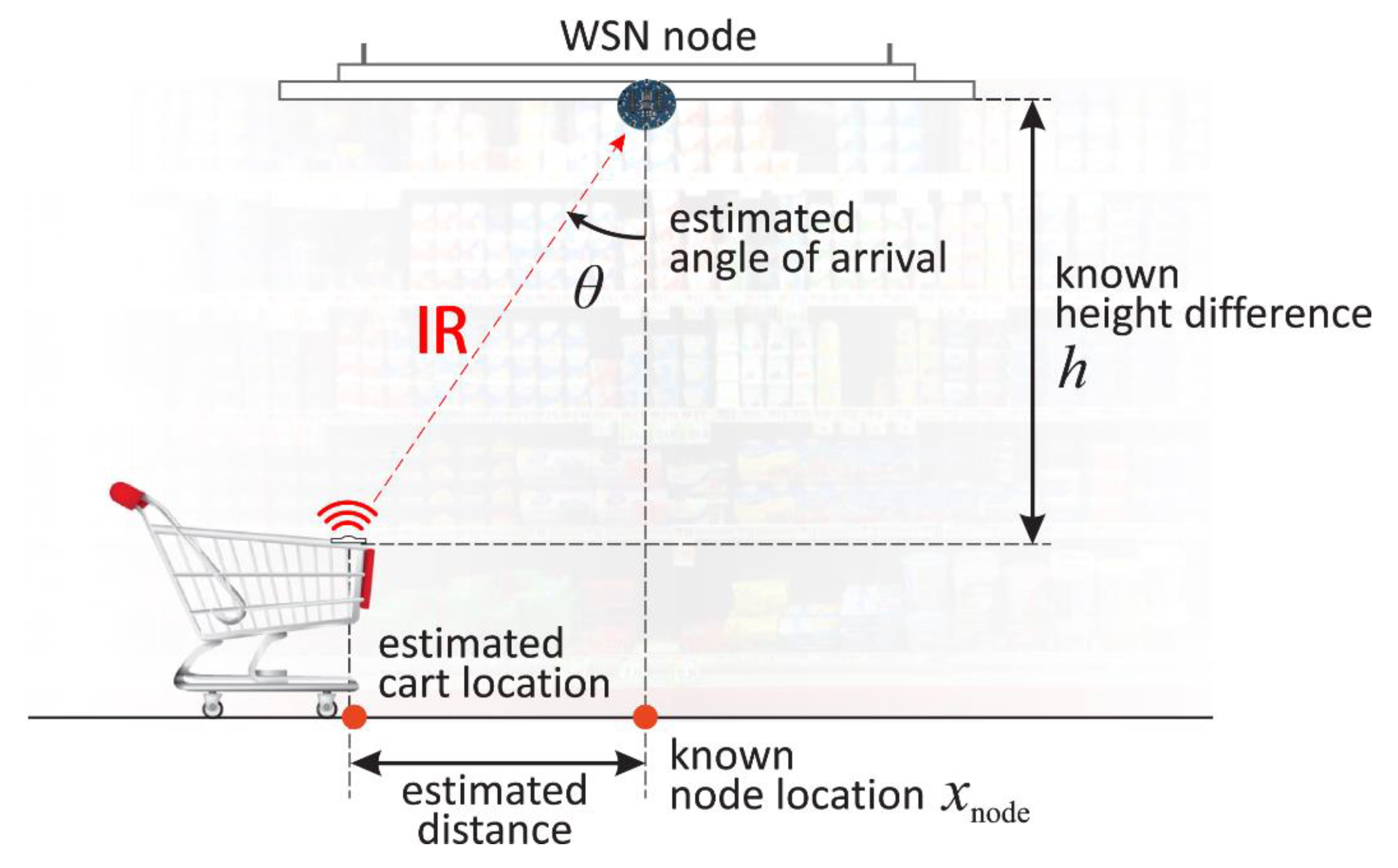
- Estimate location from selected measurement → selected measurement, along with the position of the corresponding sensing node, is used in the simple equation to estimate cart location:where d is the Euclidean distance of the estimated projection of the cart position onto the line passing through the sensing node in the direction of its orientation φi:
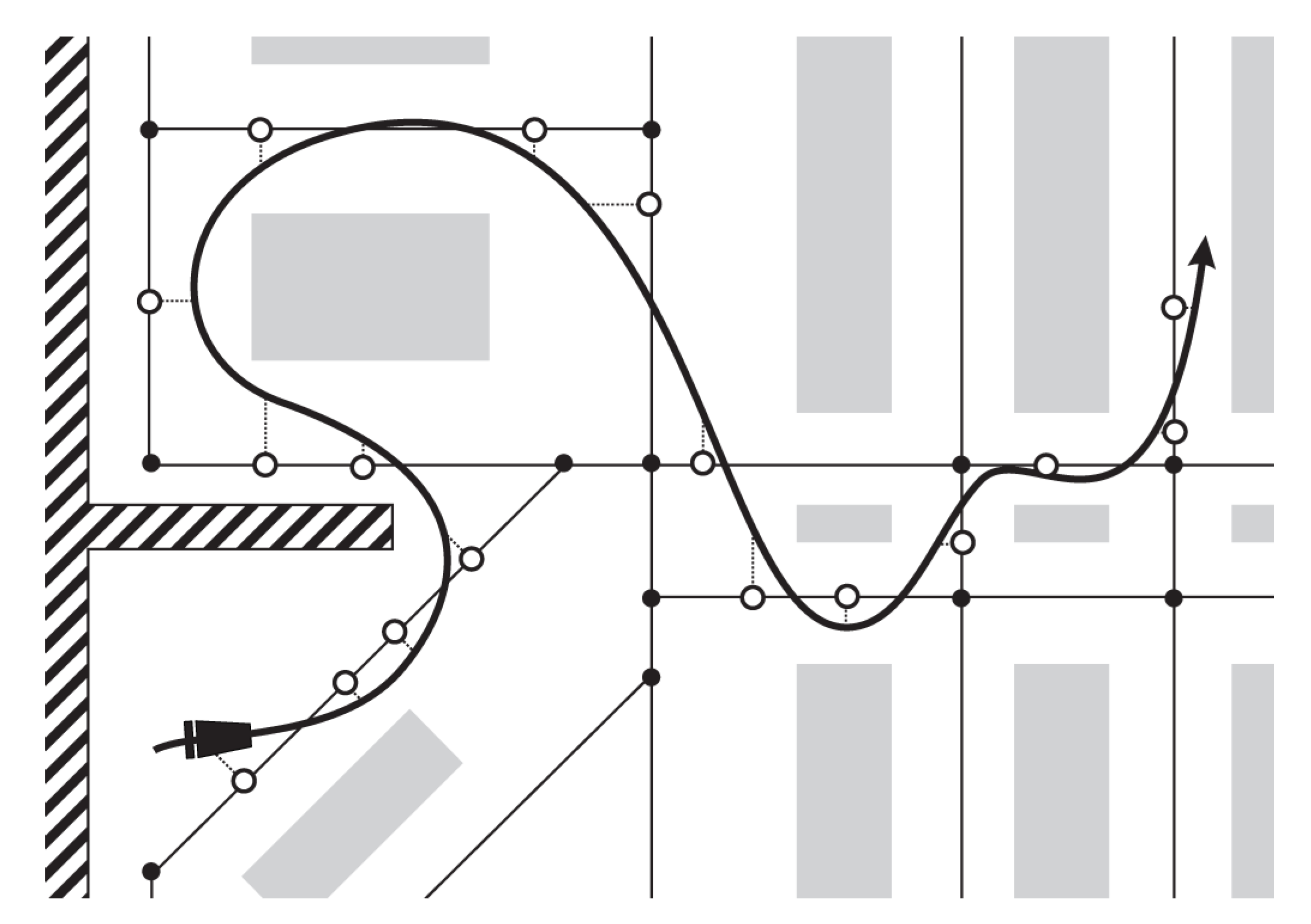
- Estimate the location on the aisles graph → find the nearest point on the aisles graph edge from the estimated location. This step is usually straightforward since the aisles graph itself is constructed according to the positions of the sensors; thus, the distance of the estimated location from the graph tends to be zero. As will be described later, this mapping of the location to the aisles graph edges is important for the shortest path navigation to the products on the shelves.
2.2.2. Server and API
- WSN measurements retrieval and storage,
- WSN node layout management,
- Cart location estimation and update,
- Product locations management,
- Store layout management,
- User signup and login,
- Token-based authentication,
- User cart registration,
- Shopping lists management,
- Shopping list based shortest path navigation (directions).
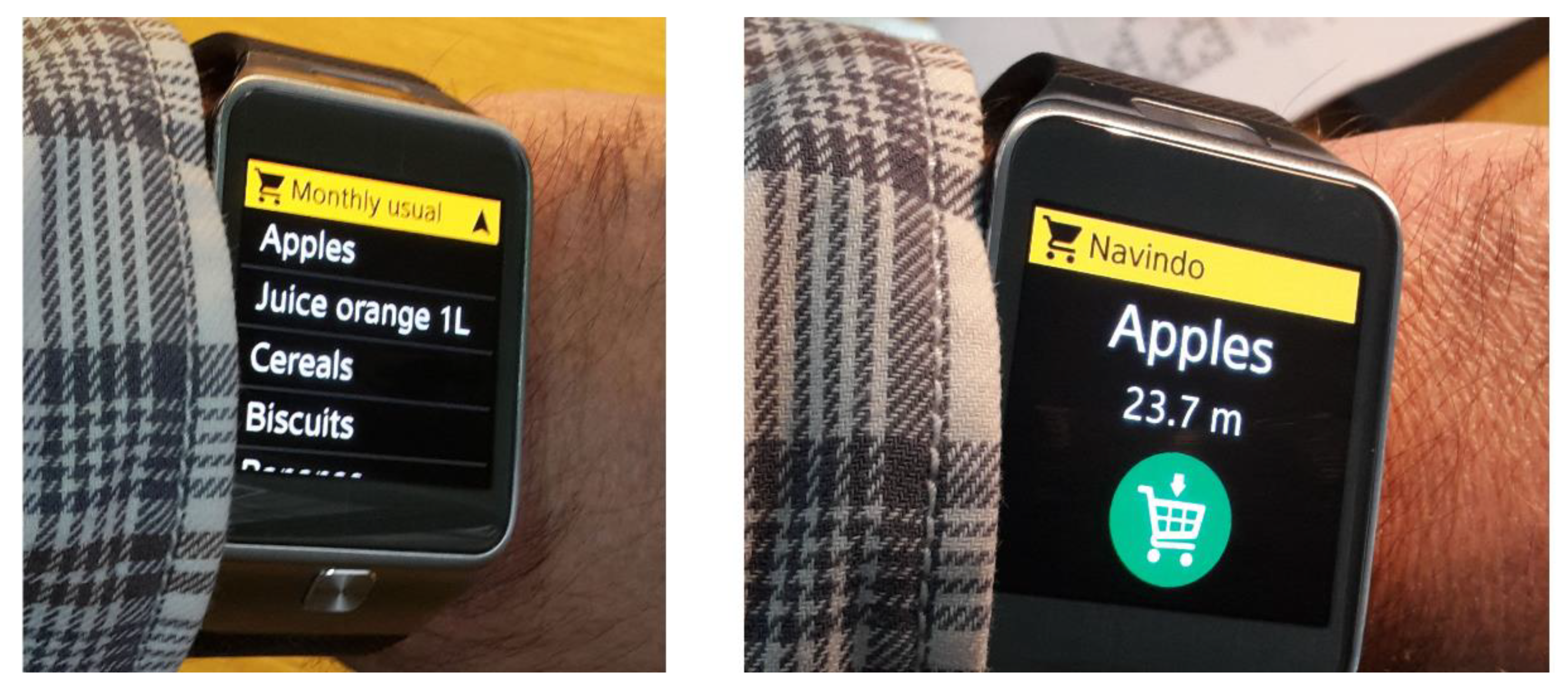
2.2.3. Client Applications
2.2.4. Prospective IoT Services
3. Results
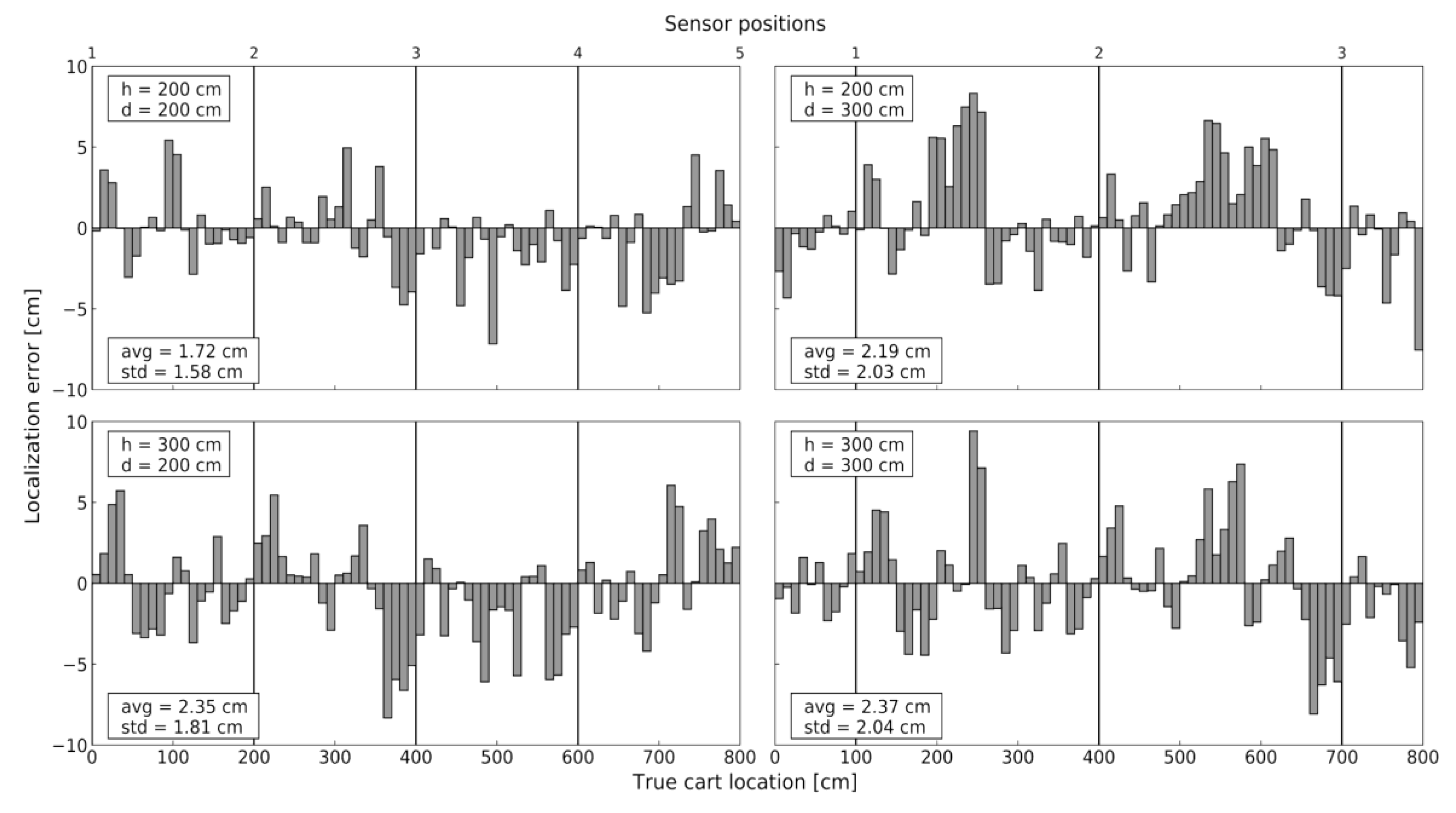
- E1: Static-1D (empirical, laboratory settings),
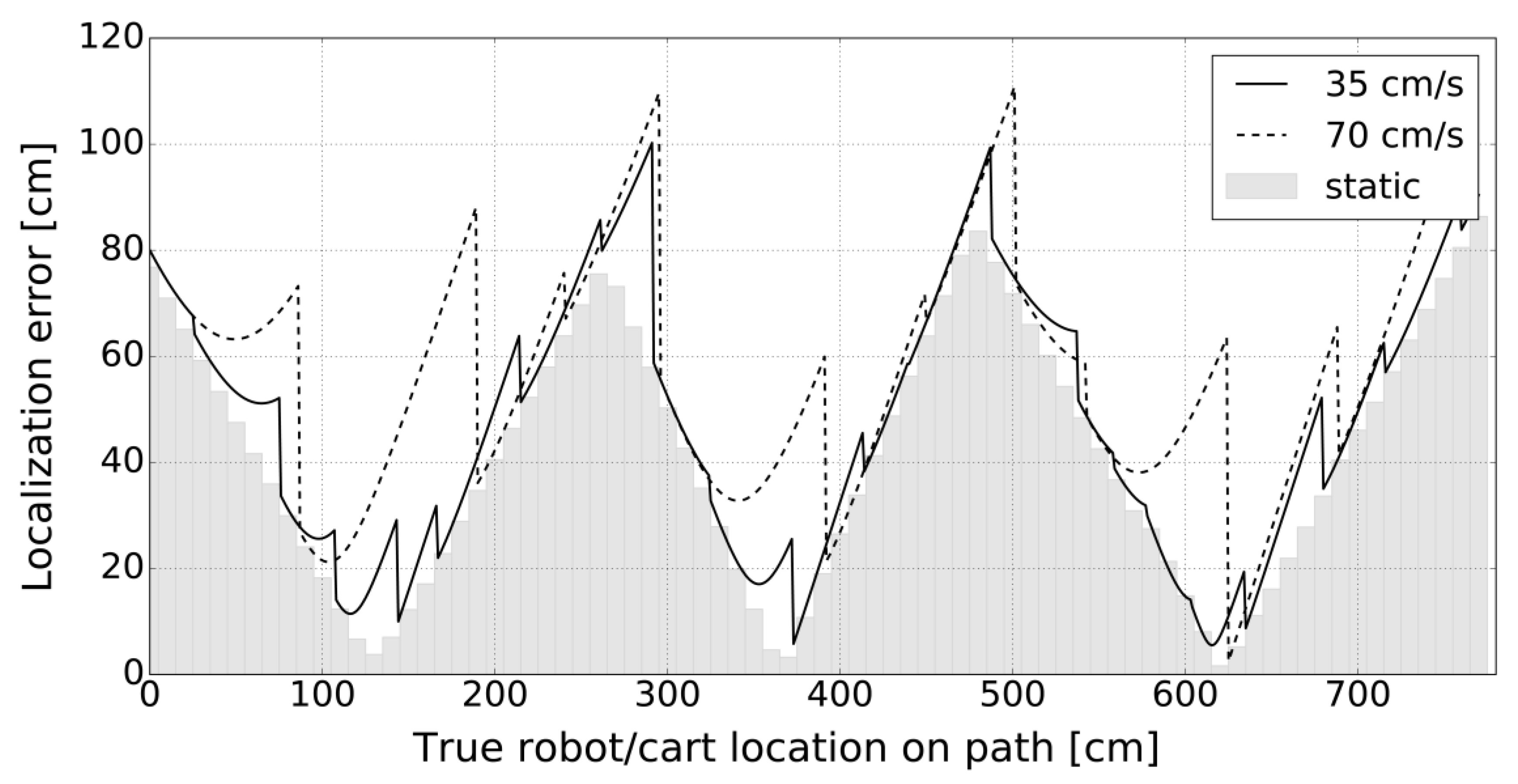
- E2: Mobile-1D (empirical, laboratory settings),
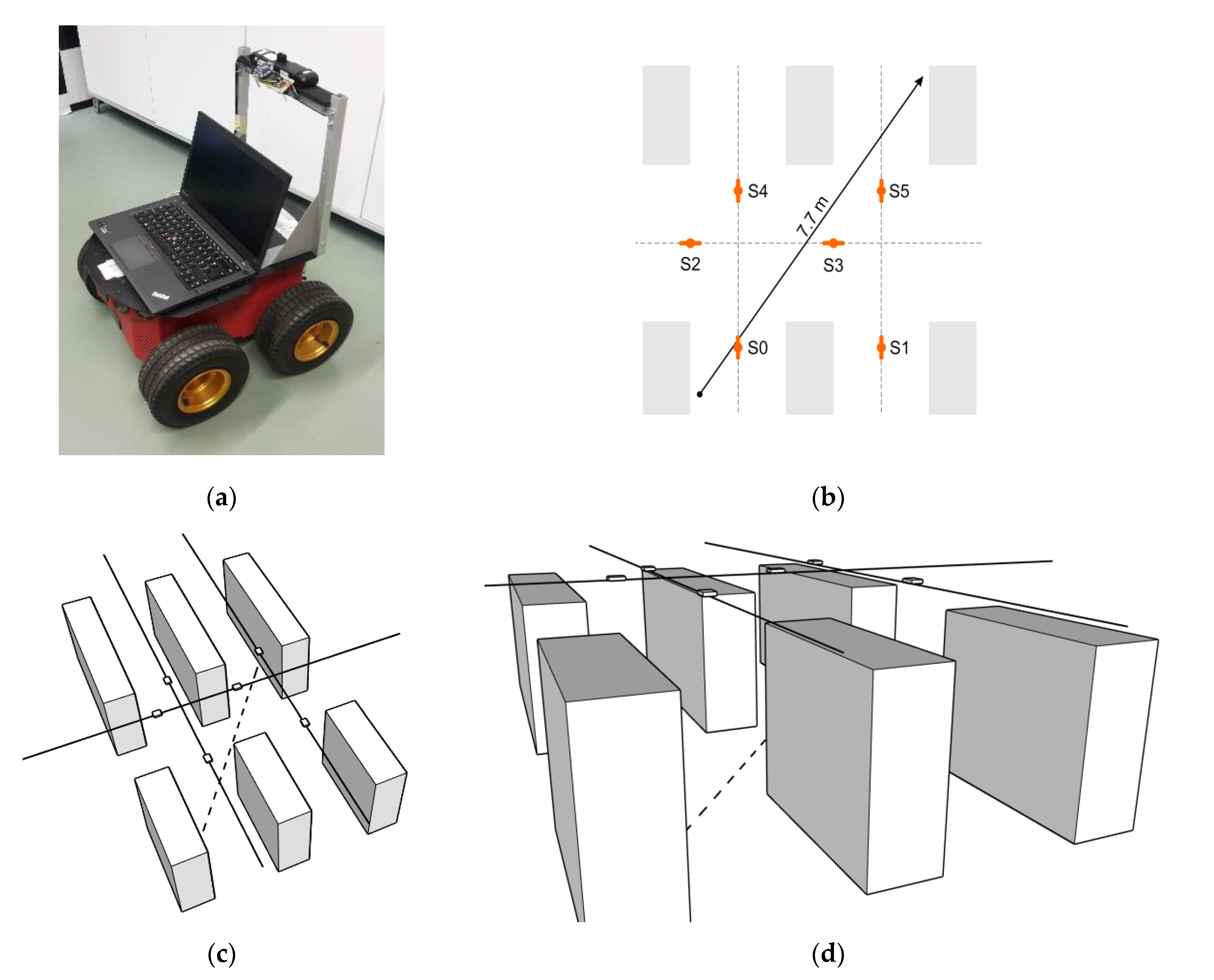
- E3: Static/Mobile-2D (empirical, laboratory settings),
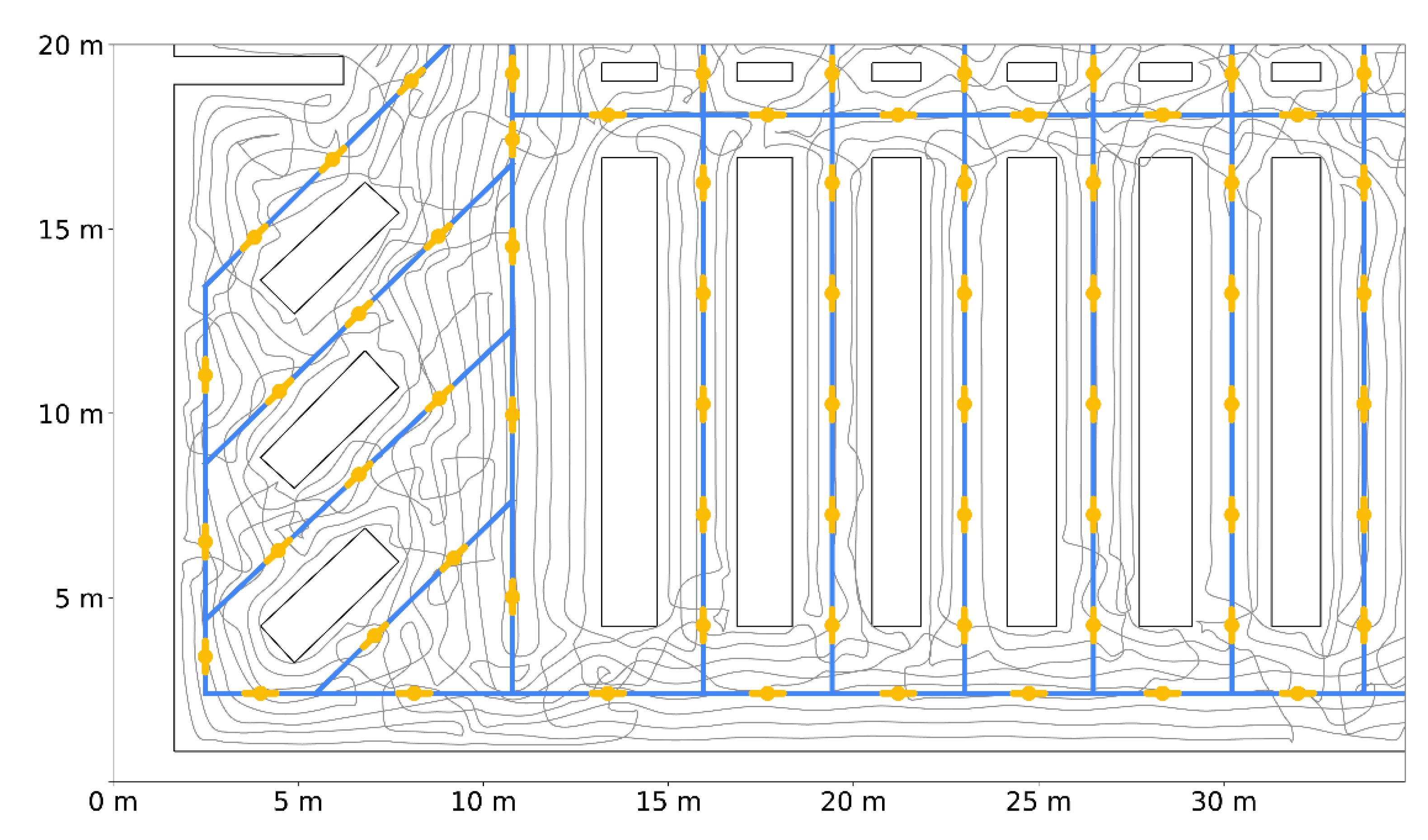
- E4: Large-scale Mobile-2D (simulation).
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Belloni, F.; Ranki, V.; Kainulainen, A.; Richter, A. Angle-based indoor positioning system for open indoor environments. In Proceedings of the 2009 6th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 19 March 2009; pp. 261–265. [Google Scholar] [CrossRef]
- Brena, R.F.; García-Vázquez, J.P.; Galván-Tejada, C.E.; Muñoz-Rodriguez, D.; Vargas-Rosales, C.; Fangmeyer, J. Evolution of Indoor Positioning Technologies: A Survey. J. Sens. 2017, 2017, 1–21. [Google Scholar] [CrossRef]
- Shang, J.; Hu, X.; Gu, F.; Wang, D.; Yu, S. Improvement Schemes for Indoor Mobile Location Estimation: A Survey. Math. Probl. Eng. 2015, 2015, 1–32. [Google Scholar] [CrossRef]
- Sen, S.; Choudhury, R.R.; Radunovic, B.; Minka, T. Precise indoor localization using PHY layer information. In Proceedings of the 10th ACM Workshop on Hot Topics in Networks—HotNets ’11, Cambridge, MA, USA, 14–15 November 2011; Association for Computing Machinery (ACM): New York, NY, USA, 2011; pp. 1–6. [Google Scholar]
- Shin, B.; Lee, J.H.; Lee, T.; Kim, H.S. Enhanced weighted K-nearest neighbor algorithm for indoor Wi-Fi positioning systems. In Proceedings of the 8th International Conference on Computing Technology and Information Management (NCM and ICNIT), Seoul, Korea, 24–26 April 2012; pp. 574–577. [Google Scholar]
- Hu, X.; Shang, J.; Gu, F.; Han, Q. Improving Wi-Fi Indoor Positioning via AP Sets Similarity and Semi-Supervised Affinity Propagation Clustering. Int. J. Distrib. Sens. Netw. 2015, 11. [Google Scholar] [CrossRef]
- Huang, J.; Millman, D.; Quigley, M.; Stavens, D.; Thrun, S.; Aggarwal, A. Efficient, generalized indoor WiFi GraphSLAM. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1038–1043. [Google Scholar]
- Yang, C.; Shao, H.-R. WiFi-based indoor positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Joshi, K.; Bharadia, D.; Kotaru, M.; Katti, S. WiDeo: Fine-grained device-free motion tracing using RF backscatter. In Proceedings of the 12th USENIX Conference on Networked Systems Design and Implementation (NSDI’15), Oakland, CA, USA, 4–6 May 2015; USENIX Association: Berkeley, CA, USA, 2015; pp. 189–204. [Google Scholar]
- Faragher, R.; Harle, R. Location Fingerprinting With Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Kriz, P.; Maly, F.; Kozel, T. Improving Indoor Localization Using Bluetooth Low Energy Beacons. Mob. Inf. Syst. 2016, 2016, 1–11. [Google Scholar] [CrossRef]
- Gezici, S.; Tian, Z.; Giannakis, G.B.; Kobayashi, H.; Molisch, A.F.; Poor, H.V.; Sahinoglu, Z. Localization via ultra-wideband radios: A look at positioning aspects for future sensor networks. IEEE Signal Process. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]
- Song, L.; Zou, H.; Zhang, T. A Low Complexity Asynchronous UWB TDOA Localization Method. Int. J. Distrib. Sens. Netw. 2015, 2015, 1–9. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor Location Sensing Using Active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Ryoo, J.; Das, S.R. Phase-based Ranging of RFID Tags with Applications to Shopping Cart Localization. In Proceedings of the 18th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems-MSWiM ’15, Cancun, Mexico, 2–6 November 2015; Association for Computing Machinery (ACM): New York, NY, USA, 2015; pp. 245–249. [Google Scholar]
- Armstrong, J.; Sekercioglu, Y.A.; Neild, A. Visible light positioning: A roadmap for international standardization. IEEE Commun. Mag. 2013, 51, 68–73. [Google Scholar] [CrossRef]
- Kuo, Y.-S.; Pannuto, P.; Hsiao, K.-J.; Dutta, P. Luxapose. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking-MobiCom ’14, Maui, HI, USA, 7–11 September 2014; Association for Computing Machinery (ACM): New York, NY, USA, 2014; pp. 447–458. [Google Scholar]
- Qiu, K.; Zhang, F.; Liu, M. Visible Light Communication-based indoor localization using Gaussian Process. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 3125–3130. [Google Scholar] [CrossRef]
- Wright, M. Philips Lighting Deploys LED-based Indoor Positioning in Carrefour Hypermarket. In LEDs Magazine. 21 May 2015. Available online: https://www.ledsmagazine.com/architectural-lighting/retail-hospitality/article/16696804/philips-lighting-deploys-ledbased-indoor-positioning-in-carrefour-hypermarket (accessed on 31 October 2020).
- Want, R.; Hopper, A.; Falcão, V.; Gibbons, J. The active badge location system. ACM Trans. Inf. Syst. 1992, 10, 91–102. [Google Scholar] [CrossRef]
- Hijikata, S.; Terabayashi, K.; Umeda, K. A simple indoor self-localization system using infrared LEDs. In Proceedings of the 2009 Sixth International Conference on Networked Sensing Systems (INSS) 2009, Pittsburgh, PA, USA, 17–19 June 2009; Volume 17, pp. 1–7. [Google Scholar] [CrossRef]
- De-La-Llana-Calvo, Á.; Galilea, J.L.L.; Gardel, A.; Rodríguez-Navarro, D.; Bravo, I.; Tsirigotis, G.; Iglesias-Miguel, J. Modeling Infrared Signal Reflections to Characterize Indoor Multipath Propagation. Sensors 2017, 17, 847. [Google Scholar] [CrossRef] [PubMed]
- De-La-Llana-Calvo, Á.; Galilea, J.L.L.; Gardel, A.; Rodríguez-Navarro, D.; Bravo, I.; Tsirigotis, G.; Iglesias-Miguel, J. Modeling the Effect of Optical Signal Multipath. Sensors 2017, 17, 2038. [Google Scholar] [CrossRef] [PubMed]
- De-La-Llana-Calvo, Á.; Galilea, J.L.L.; Gardel, A.; Rodríguez-Navarro, D.; Bravo, I.; Zapata, F.E. Characterization of Multipath Effects in Indoor Positioning Systems by AoA and PoA Based on Optical Signals. Sensors 2019, 19, 917. [Google Scholar] [CrossRef] [PubMed]
- Chung, J.; Donahoe, M.; Schmandt, C.; Kim, I.-J.; Razavai, P.; Wiseman, M. Indoor location sensing using geo-magnetism. In Proceedings of the 9th International Conference on Mobile systems, Applications, and Services (MobiSys’11), Washington, DC, USA, 28 June–1 July 2011; pp. 141–154. [Google Scholar]
- Shu, Y.; Bo, C.; Shen, G.; Zhao, C.; Li, L.; Zhao, F. Magicol: Indoor Localization Using Pervasive Magnetic Field and Opportunistic WiFi Sensing. IEEE J. Sel. Areas Commun. 2015, 33, 1443–1457. [Google Scholar] [CrossRef]
- Wang, S.; Fidler, S.; Urtasun, R. Lost Shopping! Monocular Localization in Large Indoor Spaces. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2695–2703. [Google Scholar]
- Priyantha, N.B. The Cricket Indoor Location System. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2005. [Google Scholar]
- Tragas, P.; Kalis, A. A Printed ESPAR Antenna for Mobile Computing Applications. In Proceedings of the 12th European Wireless Conference—Enabling Technologies for Wireless Multimedia Communications, Athens, Greece, 2–5 April 2006; pp. 1–4. [Google Scholar]
- Nasipuri, A.; El Najjar, R. Experimental Evaluation of an Angle Based Indoor Localization System. In Proceedings of the 2006 4th International Symposium on Modeling and Optimization in Mobile, Ad Hoc and Wireless Networks, Boston, MA, USA, 3–7 April 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1–8. [Google Scholar]
- Rodríguez-Navarro, D.; Galilea, J.L.L.; De-La-Llana-Calvo, Á.; Bravo, I.; Gardel, A.; Tsirigotis, G.; Iglesias-Miguel, J. Indoor Positioning System Based on a PSD Detector, Precise Positioning of Agents in Motion Using AoA Techniques. Sensors 2017, 17, 2124. [Google Scholar] [CrossRef] [PubMed]
- Aparicio-Esteve, E.; Hernandez, A.; Urena, J.; Villadangos, J.M.; Ciudad, F. Estimation of the Polar Angle in a 3D Infrared Indoor Positioning System based on a QADA receiver. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Song, Y.M.; Xie, Y.; Malyarchuk, V.; Xiao, J.; Jung, I.; Choi, K.-J.; Liu, Z.; Park, H.; Lu, C.; Kim, R.-H.; et al. Digital cameras with designs inspired by the arthropod eye. Nat. Cell Biol. 2013, 497, 95–99. [Google Scholar] [CrossRef] [PubMed]
- Hsu, J. Insect-Eye Camera Offers Wide-Angle Vision for Tiny Drones. In IEEE Spectrum. 1 May 2013. Available online: https://spectrum.ieee.org/robotics/robotics-hardware/insecteye-camera-offers-wideangle-vision-for-tiny-drones (accessed on 31 October 2020).
- Vishay Semiconductors. VEMT2023SLX01 IR phototransistor, NPN, SMD, Technical Data Sheet. 2013. Available online: https://www.vishay.com/docs/84166/vemt2023slx01.pdf (accessed on 31 October 2020).
- Arbula, D. Distributed algorithm for node localization in anchor free wireless sensor network. Ph.D. Thesis, Faculty of Electrical Engineering and Computing, University of Zagreb, Zagreb, Croatia, 2014. [Google Scholar]
- Li, R.; Song, T.; Capurso, N.; Yu, J.; Couture, J.; Cheng, X. IoT Applications on Secure Smart Shopping System. IEEE Internet Things J. 2017, 4, 1945–1954. [Google Scholar] [CrossRef]
- ECE Market Research. At Your Service: Die Bedeutung von Services in Shopping-Centern. Technical Report. 2016. Available online: https://www.ece.com/fileadmin/media/E1_Presse/Publikationen/ECE_At_Your_Service_deu.pdf (accessed on 31 October 2020).
- Halper, M. Carrefour Guides Shoppers to in-store Discounts via the Ceiling Lights. In LUX Review. 21 May 2015. Available online: www.luxreview.com/2015/05/21/carrefour-guides-shoppers-to-in-store-discounts-via-the-ceiling-lights (accessed on 31 October 2020).
- Halper, M. Target’s IoT Trial Expands to 100 Stores. In LUX Review. 17 November 2015. Available online: https://www.luxreview.com/2015/11/17/target-s-spy-lights-trial-expands-to-100-stores/ (accessed on 31 October 2020).
- Wippler, J.-C. JeeLib Library. Available online: https://github.com/jeelabs/jeelib (accessed on 31 October 2020).
- Hwangbo, H.; Kim, J.; Lee, Z.; Kim, S. Store layout optimization using indoor positioning system. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef]
- Ivic, S.; Crnkovic, B.; Mezic, I. Ergodicity-Based Cooperative Multiagent Area Coverage via a Potential Field. IEEE Trans. Cybern. 2016, 47, 1983–1993. [Google Scholar] [CrossRef] [PubMed]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Infrastructure | RF | WiFi, Bluetooth Low Energy (BLE), Ultra-wideband (UWB), Radio-frequency identification (RFID) |
| Light | Visible Light Positioning (VLP), Infrared (IR) | |
| Infrastructure-free | Magnetic, Sensor fusion, OCR |
| Method | Commercial Example | Typical Accuracy | Install. Costs | Energy Cons. | Main Drawbacks |
|---|---|---|---|---|---|
| VLP | ByteLight, Philips | 50 cm | high | high | high computational requirements (real-time image processing) and installation costs |
| BLE | iBeacon (Apple) | >2 m | medium | low | low signal range, hard to achieve sub-meter precision |
| UWB | Sewio | 30 cm | high | low | the need for precise time synchronization of anchor nodes, low range, specialized high-priced hardware design |
| WiFi | WiFiSLAM (Apple) | 1–2 m | low | medium | site survey fingerprinting, high sensitivity to changes in the environment |
| Magnetic | IndoorAtlas | 1–2 m | no | medium | magnetic field mapping, error increases with the size of the fingerprinting map |
| Sensor fusion | Project Tango | N/A | no | high | R&D phase, limited availability |
| IR AoA | proposed solution | 3 cm (static 1D) 20–50 cm (mobile 1D) 40 cm (static 2D) <1 m (mobile 2D) | low | low | low range, IR collision |
| Cart Speed | Mean Error [cm] | STD [cm] |
|---|---|---|
| 35 cm/s | 63.4 | 39.8 |
| 70 cm/s | 73.6 | 40.2 |
| 140 cm/s | 99.5 | 50.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arbula, D.; Ljubic, S. Indoor Localization Based on Infrared Angle of Arrival Sensor Network. Sensors 2020, 20, 6278. https://doi.org/10.3390/s20216278
Arbula D, Ljubic S. Indoor Localization Based on Infrared Angle of Arrival Sensor Network. Sensors. 2020; 20(21):6278. https://doi.org/10.3390/s20216278
Chicago/Turabian StyleArbula, Damir, and Sandi Ljubic. 2020. "Indoor Localization Based on Infrared Angle of Arrival Sensor Network" Sensors 20, no. 21: 6278. https://doi.org/10.3390/s20216278
APA StyleArbula, D., & Ljubic, S. (2020). Indoor Localization Based on Infrared Angle of Arrival Sensor Network. Sensors, 20(21), 6278. https://doi.org/10.3390/s20216278