Measuring Transverse Displacements Using Unmanned Aerial Systems Laser Doppler Vibrometer (UAS-LDV): Development and Field Validation


 ,
,  and
and 
Abstract
1. Introduction
2. Equipment Selection
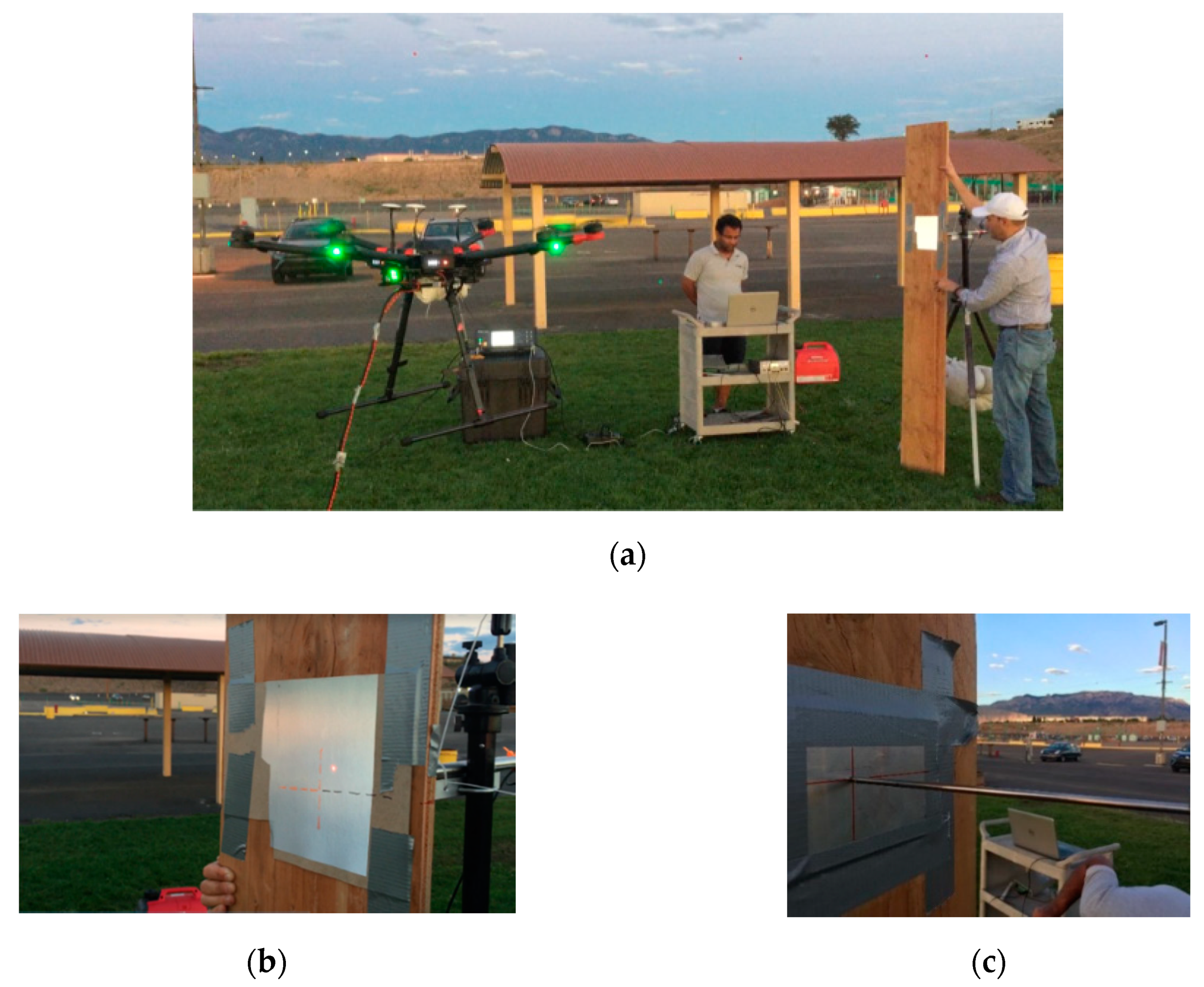
3. Field Testing
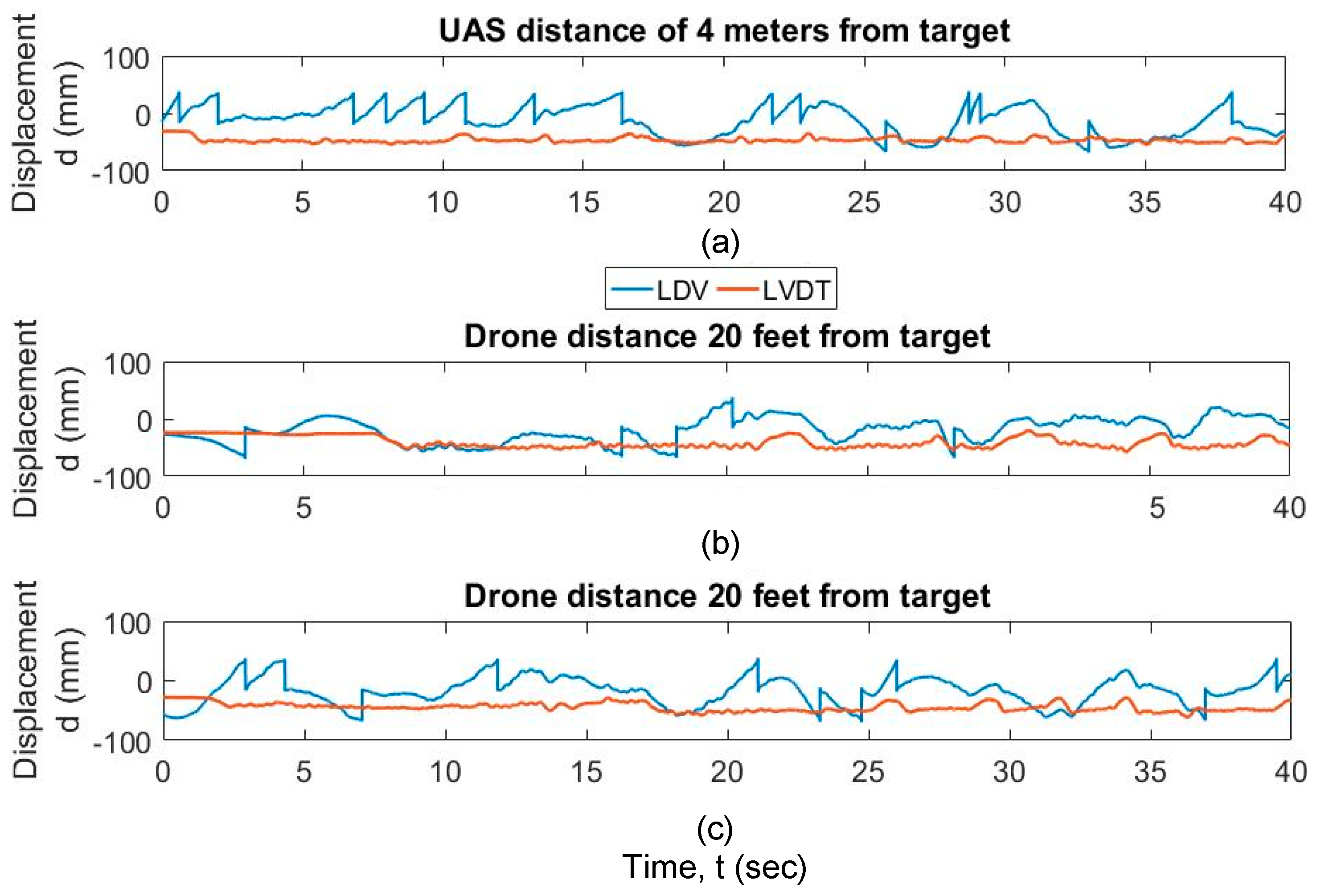
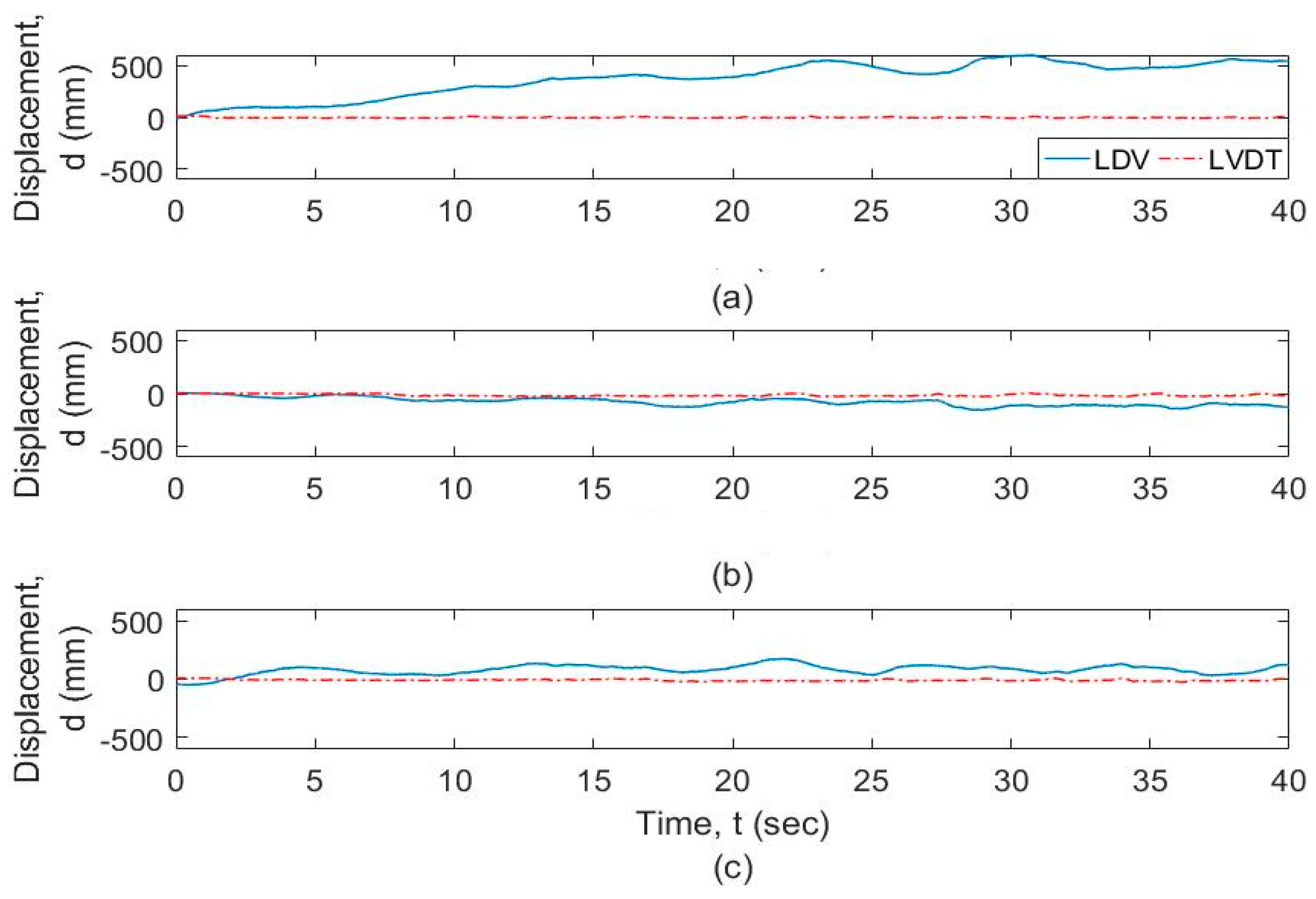
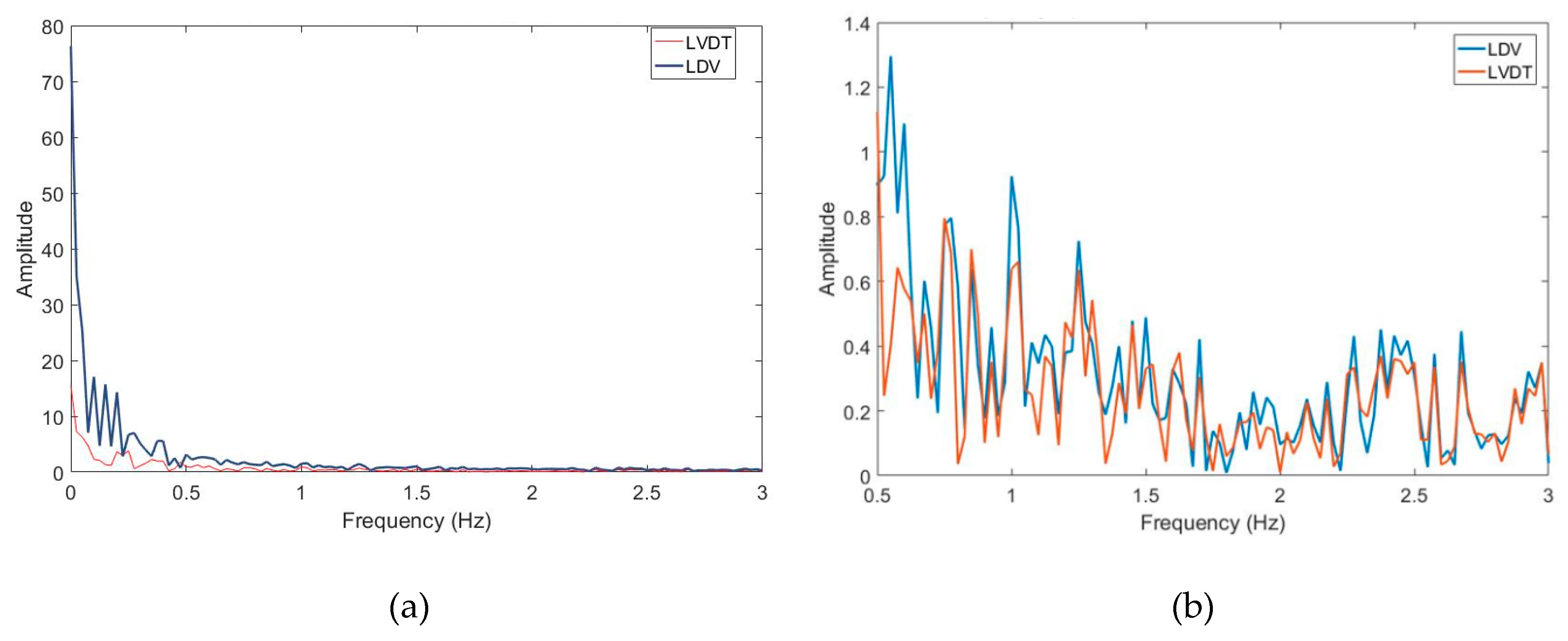
4. Results and Discussion
5. Potential and Barriers for Field Implementation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Federal Railroad Administration. Freight Railroads Background. 2015. Available online: https://www.fra.dot.gov/eLib/Details/L03011 (accessed on 22 May 2018).
- Federal Railroad Administration. Bridge Safety Standards. 2010. Available online: http://www.fra.dot.gov/eLib/details/L03212 (accessed on 22 May 2018).
- Infrastructure Report Card. Conditions and Capacity. 2017. Available online: https://www.infrastructurereportcard.org/cat-item/rail/ (accessed on 22 May 2018).
- Association of American Railroads. Railroads & States. 2018. Available online: https://www.aar.org/data-center/railroads-states/ (accessed on 22 May 2018).
- Moreu, F. Framework for Risk-Based Management and Safety of Railroad Bridge Infrastructure Using Wireless Smart Sensors (WSS). Ph.D. Thesis, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 15 May 2015. [Google Scholar]
- American Railway Engineering and Maintenance-Of-Way Association. Practical Guide to Railway Engineering, 2nd ed.; American Railway Engineering and Maintenance-Of-Way Association: Lanham, MD, USA, 2003; p. 405. [Google Scholar]
- Association of American Railroads. Bridging America: Maintaining Our Rail Bridges, Freight Rail Works. 2016. Available online: http://archive.freightrailworks.org/videos/bridging-america/ (accessed on 22 May 2018).
- Agdas, D.; Rice, J.A.; Martinez, J.R.; Lasa, I.R. Comparison of visual inspection and structural-health monitoring as bridge condition assessment methods. J. Perform. Constr. Facil. 2015, 30, 04015049-10. [Google Scholar] [CrossRef]
- Moreu, F.; LaFave, J.M. Current Research Topics: Railroad Bridges and Structural Engineering; Newmark Structural Engineering Laboratory, University of Illinois at Urbana-Champaign: Champaign, IL, USA, 16 October 2012. [Google Scholar]
- Moreu, F.; Jo, H.; Li, J.; Kim, R.E.; Cho, S.; Kimmle, A.; LaFave, J.M. Dynamic assessment of timber railroad bridges using displacements. J. Bridge Eng. 2014, 20, 04014114-12. [Google Scholar] [CrossRef]
- Yang, J.; Li, J.B.; Lin, G. A simple approach to integration of acceleration data for dynamic soil–structure interaction analysis. Soil Dyn. Earthq. Eng. 2005, 26, 725–773. [Google Scholar] [CrossRef]
- Nagayama, T.; Spencer, B.F., Jr. Structural Health Monitoring Using Smart Sensors; Newmark Structural Engineering Laboratory, University of Illinois at Urbana-Champaign: Champaign, IL, USA, 10 September 2007. [Google Scholar]
- Ozdagli, A.I.; Moreu, F.; Gomez, J.A.; Garp, P.; Vemuganti, S. Data Fusion of Accelerometers with Inclinometers for Reference-free High Fidelity Displacement Estimation. In Proceedings of the 8th European Workshop on Structural Health Monitoring (EWSHM 2016), Bilbao, Spain, 5–8 July 2016; pp. 5–8. [Google Scholar]
- Wang, T.; Garg, V.; Chu, K. Railway Bridge/Vehicle Interaction Studies with New Vehicle Model. J. Struct. Eng. 1991, 117, 2099–2116. [Google Scholar] [CrossRef]
- Meng, X.; Dodson, A.H.; Roberts, G.W. Detecting bridge dynamics with GPS and triaxial accelerometers. Eng. Struct. 2007, 29, 3178–3184. [Google Scholar] [CrossRef]
- Yi, T.; Li, H.; Gu, M. Experimental assessment of high-rate GPS receivers for deformation monitoring of bridge. Measurement 2013, 46, 420–432. [Google Scholar] [CrossRef]
- Psimoulis, P.A.; Stiros, S.C. Measurement of deflections and of oscillation frequencies of engineering structures using Robotic Theodolites (RTS). Eng. Struct. 2007, 29, 3312–3324. [Google Scholar] [CrossRef]
- Lee, J.J.; Shinozuka, M. A vision-based system for remote sensing of bridge displacement. NDT E Int. 2006, 39, 425–431. [Google Scholar] [CrossRef]
- Fukuda, Y.; Feng, M.Q.; Shinozuka, M. Cost-effective vision-based system for monitoring dynamic response of civil engineering structures. Struct. Control Health Monit. 2010, 17, 918–936. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q.; Ozer, E.; Fukuda, Y. A vision-based sensor for noncontact structural displacement measurement. Sensors 2015, 15, 16557–16575. [Google Scholar] [CrossRef]
- Nasimi, R.; Mascarenas, D.; Moreu, F. 3D Displacement Monitoring of Railroad Bridges Using Unmanned Aerial Vehicles (UAVs). Struct. Health Monit. 2019, 2019. [Google Scholar] [CrossRef]
- Blanks, M. UAS Applications. In Introduction to Unmanned Aircraft Systems; Marshall, D.M., Barnhart, R.K., Shappee, E., Most, M.T., Eds.; CRC Press: Boca Raton, FL, USA, 2016; pp. 19–42. [Google Scholar]
- Cummings, A.R.; McKee, A.; Kulkarni, K.; Markandey, N. The Rise of UAVs. Photogramm. Eng. Remote Sens. 2017, 83, 317–325. [Google Scholar] [CrossRef]
- Restas, A. Drone applications for supporting disaster management. World J. Eng. Technol. 2015, 3, 316. [Google Scholar] [CrossRef]
- Allen, J.; Walsh, B. Enhanced oil spill surveillance, detection and monitoring through the applied technology of unmanned air systems. In International Oil Spill Conference; American Petroleum Institute: Washington, DC, USA, 2008; Volume 2008, pp. 113–120. [Google Scholar]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.D.; Ries, J.B. Unmanned aerial vehicle (UAV) for monitoring soil erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef]
- Getzin, S.; Nuske, R.S.; Wiegand, K. Using unmanned aerial vehicles (UAV) to quantify spatial gap patterns in forests. Remote Sens. 2014, 6, 6988–7004. [Google Scholar] [CrossRef]
- Paneque-Gálvez, J.; McCall, M.K.; Napoletano, B.M.; Wich, S.A.; Koh, L.P. Small drones for community-based forest monitoring: An assessment of their feasibility and potential in tropical areas. Forests 2014, 5, 1481–1507. [Google Scholar] [CrossRef]
- Ham, Y.; Han, K.K.; Lin, J.J.; Golparvar-Fard, M. Visual monitoring of civil infrastructure systems via camera-equipped Unmanned Aerial Vehicles (UAVs): A review of related works. Vis. Eng. 2016, 4, 1–8. [Google Scholar] [CrossRef]
- Hawken, R.; Nguyen, T.; Ivanyi, J. Bridge condition inspections using unmanned aerial vehicles: A trial project. In Proceedings of the 10th Austroads Bridge Conference, Melbourne, Victoria, Australia, 2–6 April 2017. [Google Scholar]
- Ellenberg, A.J. Structural Health Monitoring Using Unmanned Aerial Systems. Ph.D. Thesis, Drexel University, Philadelphia, PA, USA, 13 June 2017. [Google Scholar]
- Otero, L.D. Proof of Concept for Using Unmanned Aerial Vehicles for High Mast Pole and Bridge Inspections; No. BDV28-977-02; Florida. Dept. of Transportation. Research Center: Tallahassee, FL, USA, 1 June 2015.
- Mascareñas, D.; Liao, A.; Morales, J.; Berl, F.; Hailey, S.; Milligan, J.; Vigil, D.; Smith, A.; Van Wrinkle, R. Unmanned vehicles for lightning protection system inspection and maintenance. Struct. Health Monit. 2019, 2019. [Google Scholar] [CrossRef]
- Mason, J.D.; Ayorinde, E.T.; Mascarenas, D.D.; Moreu, F. Tap Testing Hammer Using Unmanned Aerial Systems (UASs); No. LA-UR-16-26204; Los Alamos National Laboratory (LANL): Los Alamos, NM, USA, 11 August 2016.
- Ellenberg, A.; Kontsos, A.; Moon, F.; Bartoli, I. Bridge related damage quantification using unmanned aerial vehicle imagery. Struct. Control Health Monit. 2016, 23, 1168–1179. [Google Scholar] [CrossRef]
- Yoon, H.; Elanwar, H.; Choi, H.; Golparvar-Fard, M.; Spencer, B.F. Target-free approach for vision-based structural system identification using consumer-grade cameras. Struct. Control Health Monit. 2016, 23, 1405–1416. [Google Scholar] [CrossRef]
- Reagan, D.; Sabato, A.; Niezrecki, C. Unmanned aerial vehicle acquisition of three-dimensional digital image correlation measurements for structural health monitoring of bridges. In Nondestructive Characterization and Monitoring of Advanced Materials, Aerospace, and Civil Infrastructure 2017; International Society for Optics and Photonics: Bellingham, WA, USA, 2017; Volume 10169, p. 1016909-10. [Google Scholar]
- Chan, B.; Anstice, D.; Pettigrew, T.; Saul, I. Photogrammetric modelling and drones for the effective inspection and management of major steel truss bridges: Case study. In Proceedings of the 10th Austroads Bridge Conference, Melbourne, Victoria, Australia, 2–6 April 2017. [Google Scholar]
- Mohammadi, M.E.; Watson, D.P.; Wood, R.L. Deep Learning-Based Damage Detection from Aerial SfM Point Clouds. Drones 2019, 3, 68. [Google Scholar] [CrossRef]
- Javadnejad, F.; Simpson, C.H.; Gillins, D.T.; Claxton, T.; Olsen, M.J. An assessment of UAS-based photogrammetry for civil integrated management (CIM) modeling of pipes. In Proceedings of the Pipelines 2017 Conference, Phoenix, AZ, USA, 6–9 August 2017; pp. 112–123. [Google Scholar]
- Chen, S.E.; Hauser, E.W.; Boyle, C.G. Spatially Integrated Aerial Photography for Bridge, Structure, and Environmental Monitoring. U.S. Patent No. 9,014,415, 21 April 2015. [Google Scholar]
- National Oceanic and Atmospheric Administration. What Is Lidar? 2017. Available online: https://oceanservice.noaa.gov/facts/lidar.html (accessed on 22 May 2018).
- Zhang, S.; Bogus, S.M. Use of low-cost remote sensing for infrastructure management. In Proceedings of the Construction Research Congress 2014: Construction in a Global Network, Atlanta, Georgia, 19–21 May 2014; pp. 1299–1308. [Google Scholar]
- Verma, V.; Kumar, R.; Hsu, S. 3D building detection and modeling from aerial LIDAR data. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; Volume 2, pp. 2213–2220. [Google Scholar]
- Siebert, S.; Teizer, J. Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- Liu, C.; Li, W.; Lei, W.; Liu, L.; Hu, H. Architecture planning and geo-disasters assessment mapping of landslide by using airborne LiDAR data and UAV images. Proc. SPIE 2011, 8286-7, 82861Q. [Google Scholar]
- Chen, L.C.; Lin, L.J. Detection of building changes from aerial images and light detection and ranging (LIDAR) data. J. Appl. Remote Sens. 2010, 4, 041870. [Google Scholar]
- Woolard, J.W.; Colby, J.D. Spatial characterization, resolution, and volumetric change of coastal dunes using airborne LIDAR: Cape Hatteras, North Carolina. Geomorphology 2002, 48, 269–287. [Google Scholar] [CrossRef]
- Kim, K.; Sohn, H. Dynamic displacement estimation by fusing LDV and LiDAR measurements via smoothing based Kalman filtering. Mech. Syst. Signal Process. 2017, 82, 339–355. [Google Scholar] [CrossRef]
- Nassif, H.H.; Gindy, M.; Davis, J. Comparison of laser Doppler vibrometer with contact sensors for monitoring bridge deflection and vibration. NDT E Int. 2005, 38, 213–218. [Google Scholar] [CrossRef]
- Garg, P.; Moreu, F.; Ozdagli, A.; Taha, M.R.; Mascareñas, D. Noncontact dynamic displacement measurement of structures using a moving laser Doppler vibrometer. J. Bridge Eng. 2019, 24, 04019089-13. [Google Scholar] [CrossRef]
- Polytec Inc. Laser Doppler Vibrometry. 2018. Available online: http://www.polytec.com/us/solutions/vibration-measurement/basic-principles-of-vibrometry/ (accessed on 22 May 2018).
- Popular Mechanics. Is Bigger Better? ‘Monster’ Trains vs Freight Trains. 2010. Available online: http://www.popularmechanics.com/technology/infrastructure/a5314/4345689/ (accessed on 22 May 2018).
- FRA Rail Program Delivery Meeting. 2016. Available online: https://railroads.dot.gov/training-guidance/meetings/2016-fra-rail-program-delivery-meeting (accessed on 23 October 2020).
- DJI. Matrice 600 PRO, DJI. 2017. Available online: https://www.dji.com/matrice600-pro/info#specs (accessed on 30 August 2020).
- Ozdagli, A.I.; Liu, B.; Moreu, F. Measuring total transverse reference-free displacements for condition assessment of timber railroad bridges: Experimental validation. J. Struct. Eng. 2018, 144, 04018047-11. [Google Scholar] [CrossRef]
- Keyence Inc. Distance Sensors. Available online: https://www.keyence.com/landing/marker/lp_lmt_yvo4.jsp?aw=bing-kaenMD189101eebr&k_clickid=c38506af-1f85-4155-9496e7969309c6c7&utm_source=bing&utm_medium=cpc&utm_id=bing_141476790_3023370269_80745397660295_kwd-80745450038263_c&msclkid=f98c07c1961217c66f425a543362cbdf (accessed on 4 July 2020).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Barrier | Component | Proposed Solution |
|---|---|---|
| Expensive | LDV | For UAS applications, the UAS does not need to be hundreds of meters away from the moving object. Explore alternative lasers with fewer requirements. |
| Heavy | LDV | For lasers with a shorter range, the weight drops considerably. Explore lasers with shorter ranges (1 or 2 m, instead of hundreds of meters) |
| Tethered | UAS | Study integration of a wireless laser in the UAS, by designing and developing a light DAQ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garg, P.; Nasimi, R.; Ozdagli, A.; Zhang, S.; Mascarenas, D.D.L.; Reda Taha, M.; Moreu, F. Measuring Transverse Displacements Using Unmanned Aerial Systems Laser Doppler Vibrometer (UAS-LDV): Development and Field Validation. Sensors 2020, 20, 6051. https://doi.org/10.3390/s20216051
Garg P, Nasimi R, Ozdagli A, Zhang S, Mascarenas DDL, Reda Taha M, Moreu F. Measuring Transverse Displacements Using Unmanned Aerial Systems Laser Doppler Vibrometer (UAS-LDV): Development and Field Validation. Sensors. 2020; 20(21):6051. https://doi.org/10.3390/s20216051
Chicago/Turabian StyleGarg, Piyush, Roya Nasimi, Ali Ozdagli, Su Zhang, David Dennis Lee Mascarenas, Mahmoud Reda Taha, and Fernando Moreu. 2020. "Measuring Transverse Displacements Using Unmanned Aerial Systems Laser Doppler Vibrometer (UAS-LDV): Development and Field Validation" Sensors 20, no. 21: 6051. https://doi.org/10.3390/s20216051
APA StyleGarg, P., Nasimi, R., Ozdagli, A., Zhang, S., Mascarenas, D. D. L., Reda Taha, M., & Moreu, F. (2020). Measuring Transverse Displacements Using Unmanned Aerial Systems Laser Doppler Vibrometer (UAS-LDV): Development and Field Validation. Sensors, 20(21), 6051. https://doi.org/10.3390/s20216051