Analyzing the Performance of a Miniature 3D Wind Sensor for Mars

 , ,
, ,  , ,
, ,
Abstract
:1. Introduction
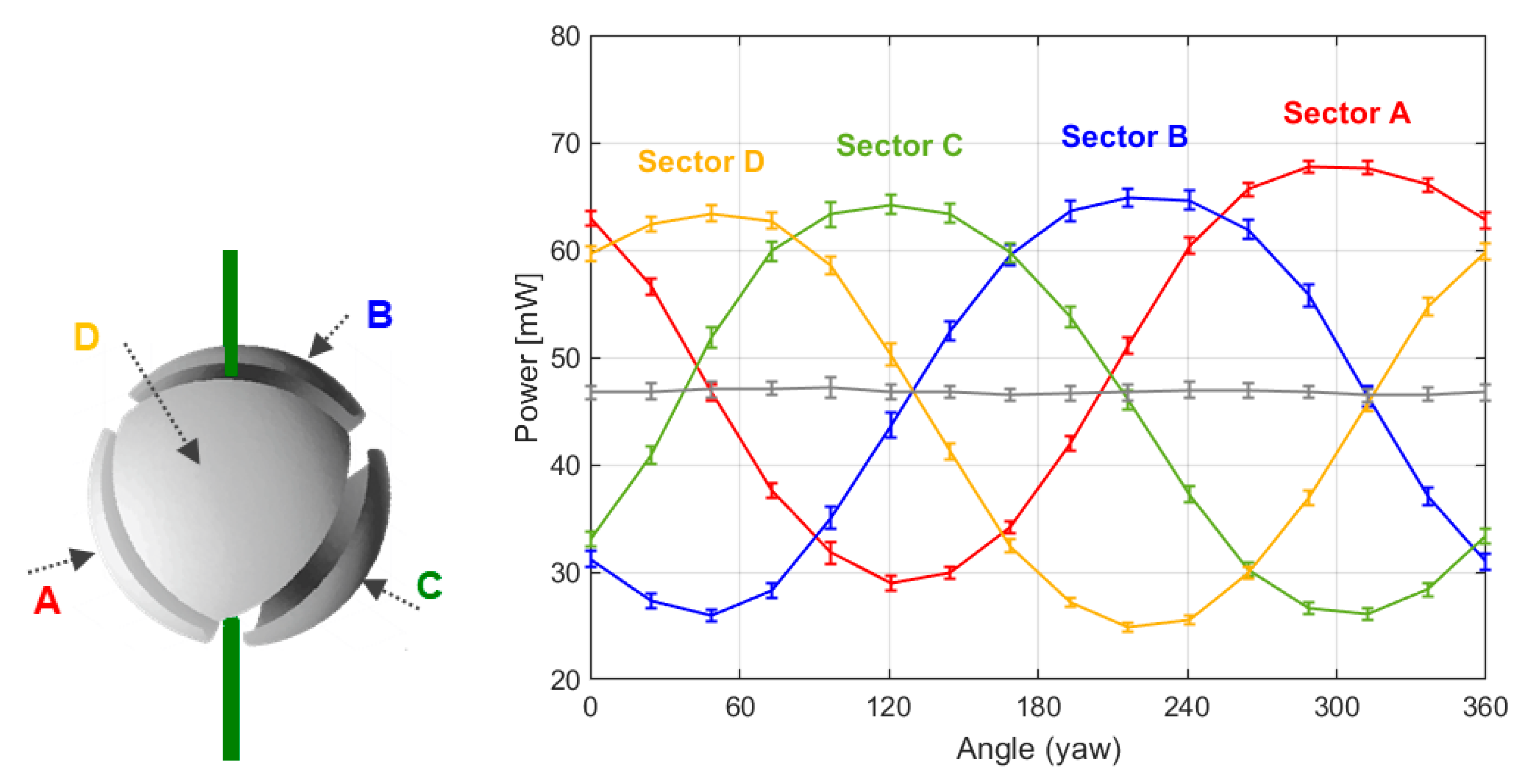
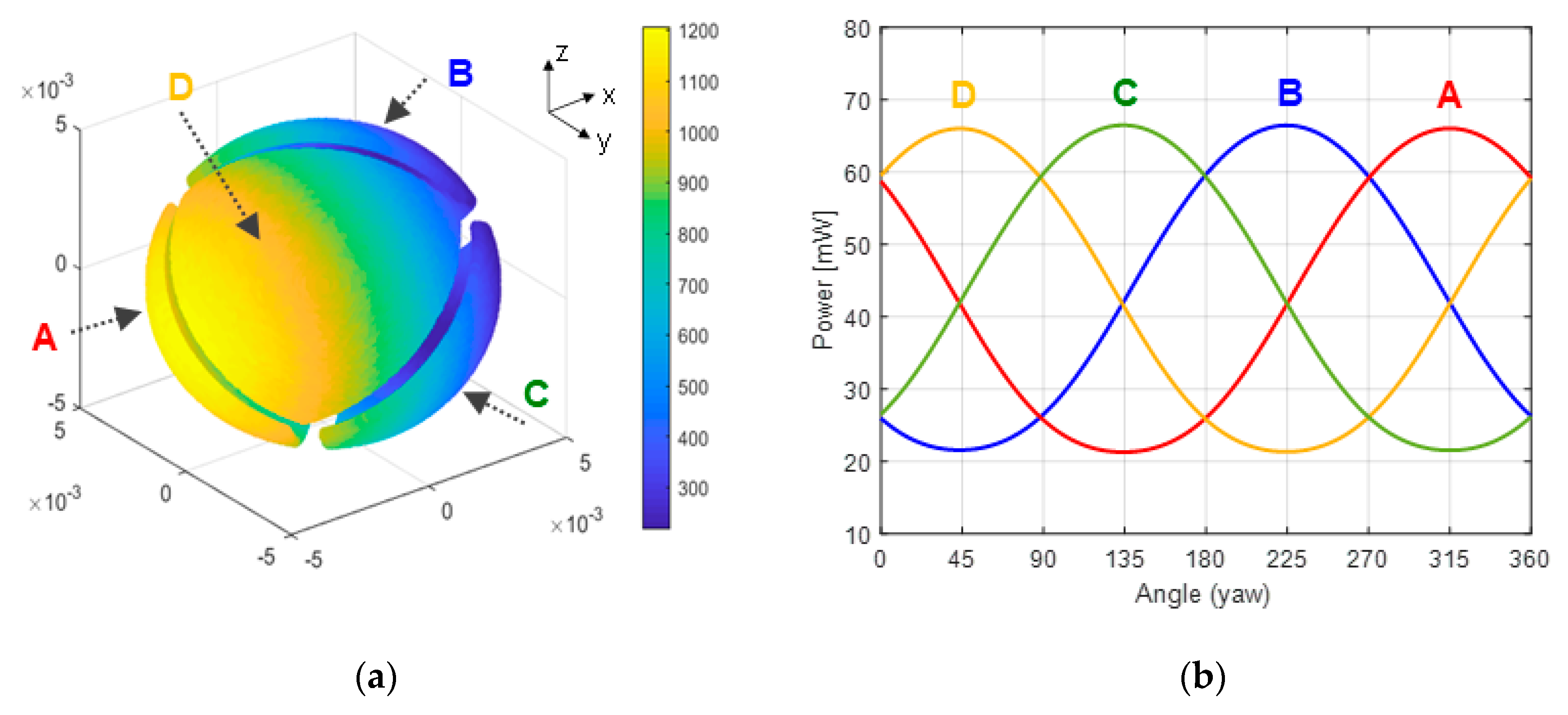
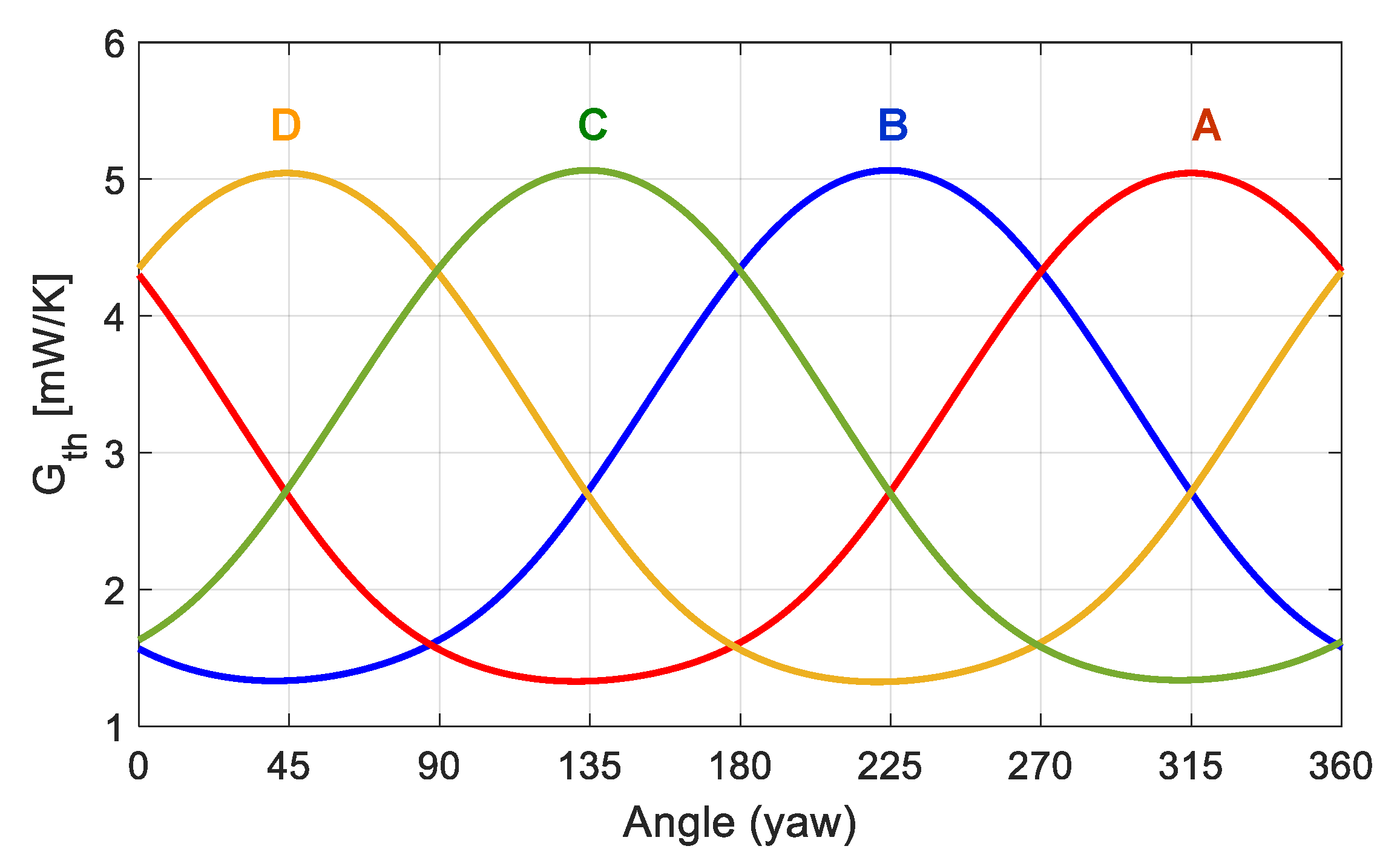
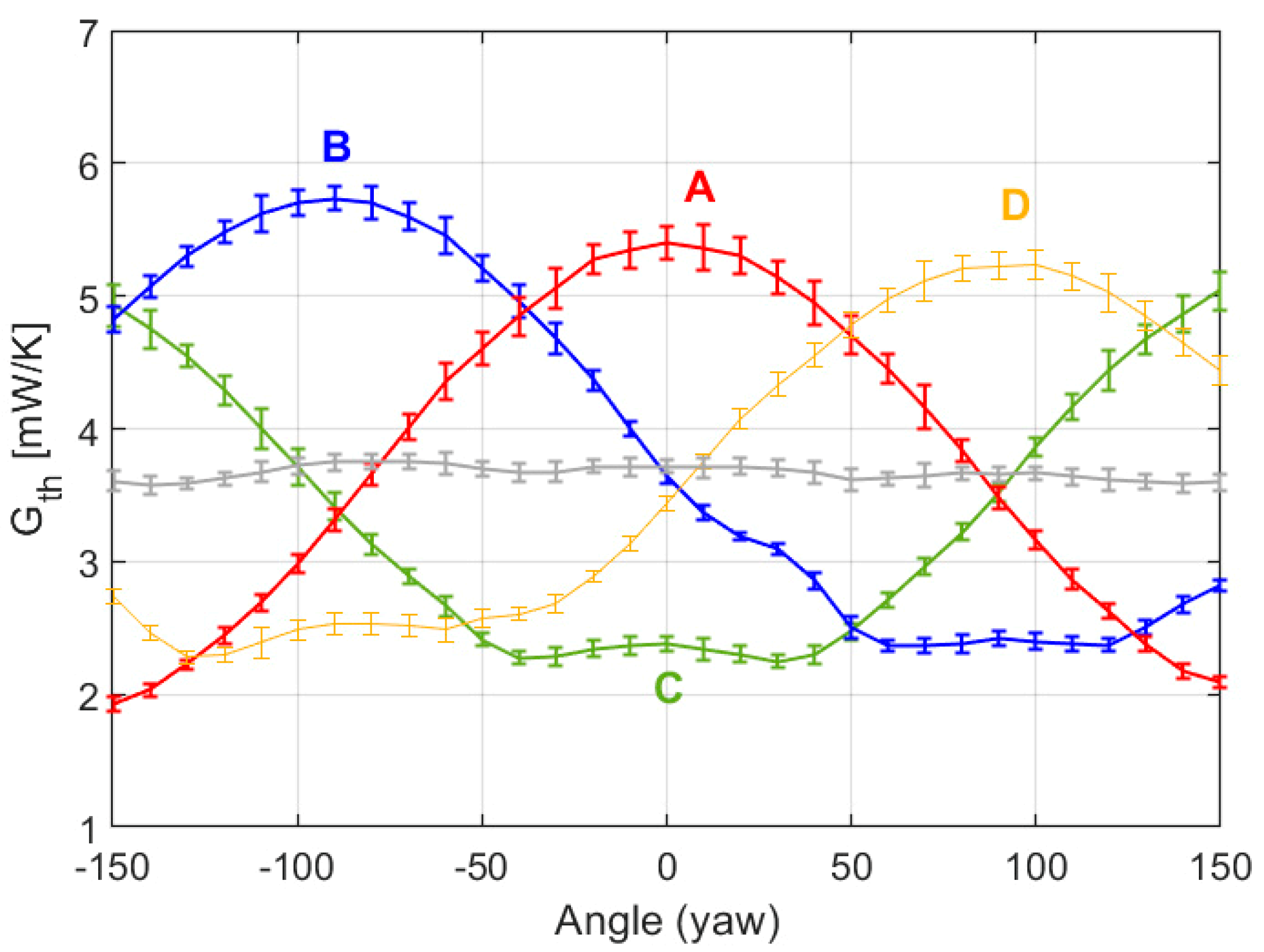
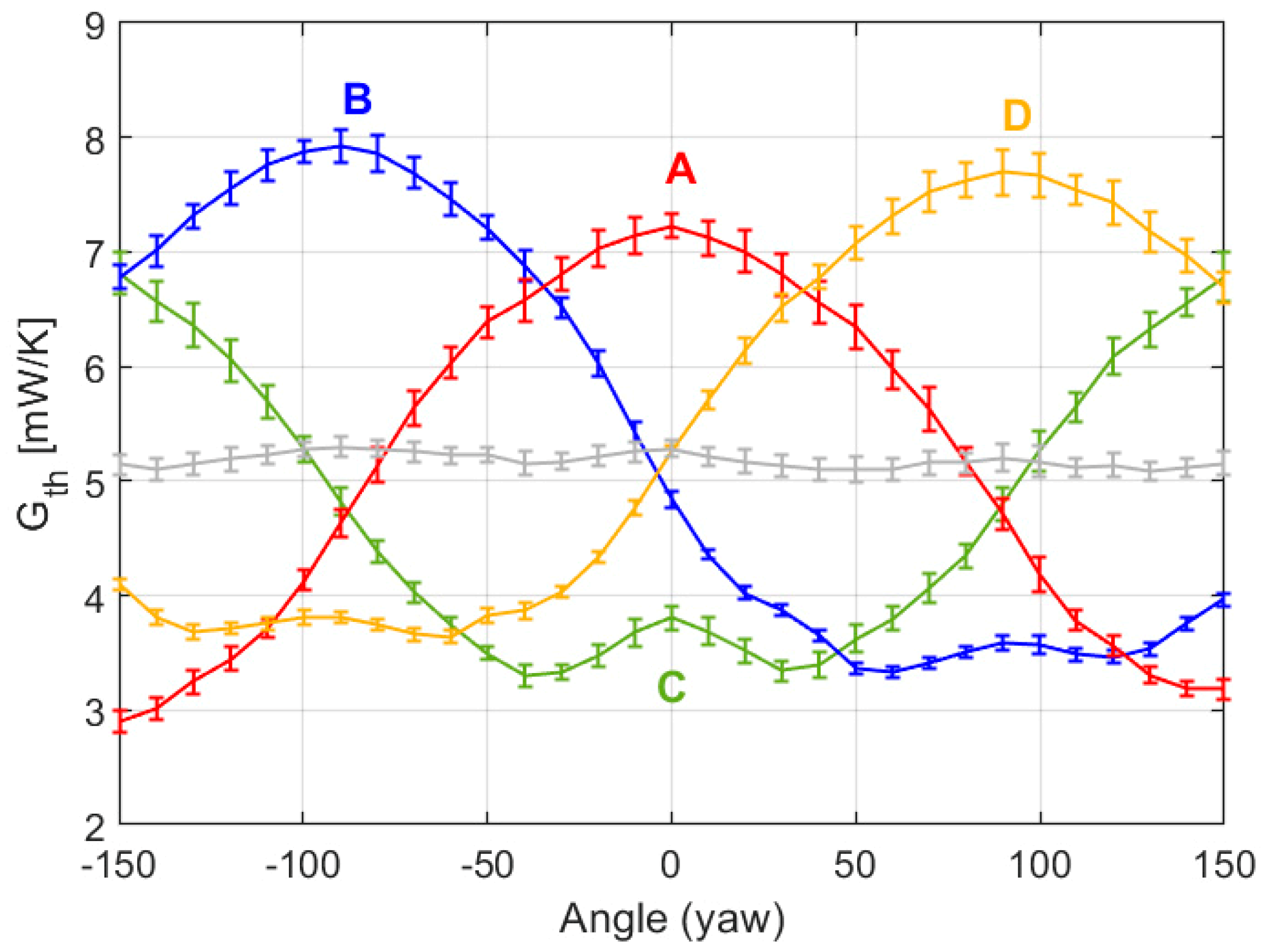
- Simplification of the 3D wind component retrieval. The spherical geometry of the sensor greatly simplifies wind speed and angle retrieval, due to its symmetry. The signals generated in the sectors are sinusoidal-like, and it has been possible to design a simple inverse algorithm that will be presented later in the paper.
- Increase robustness, miniaturization and system simplification (wind speed is inferred only from four signals). The sphere containing the active sectors has a 10 mm diameter.
2. Sensor Operation
2.1. Operation Conditions for the Spherical Sensor
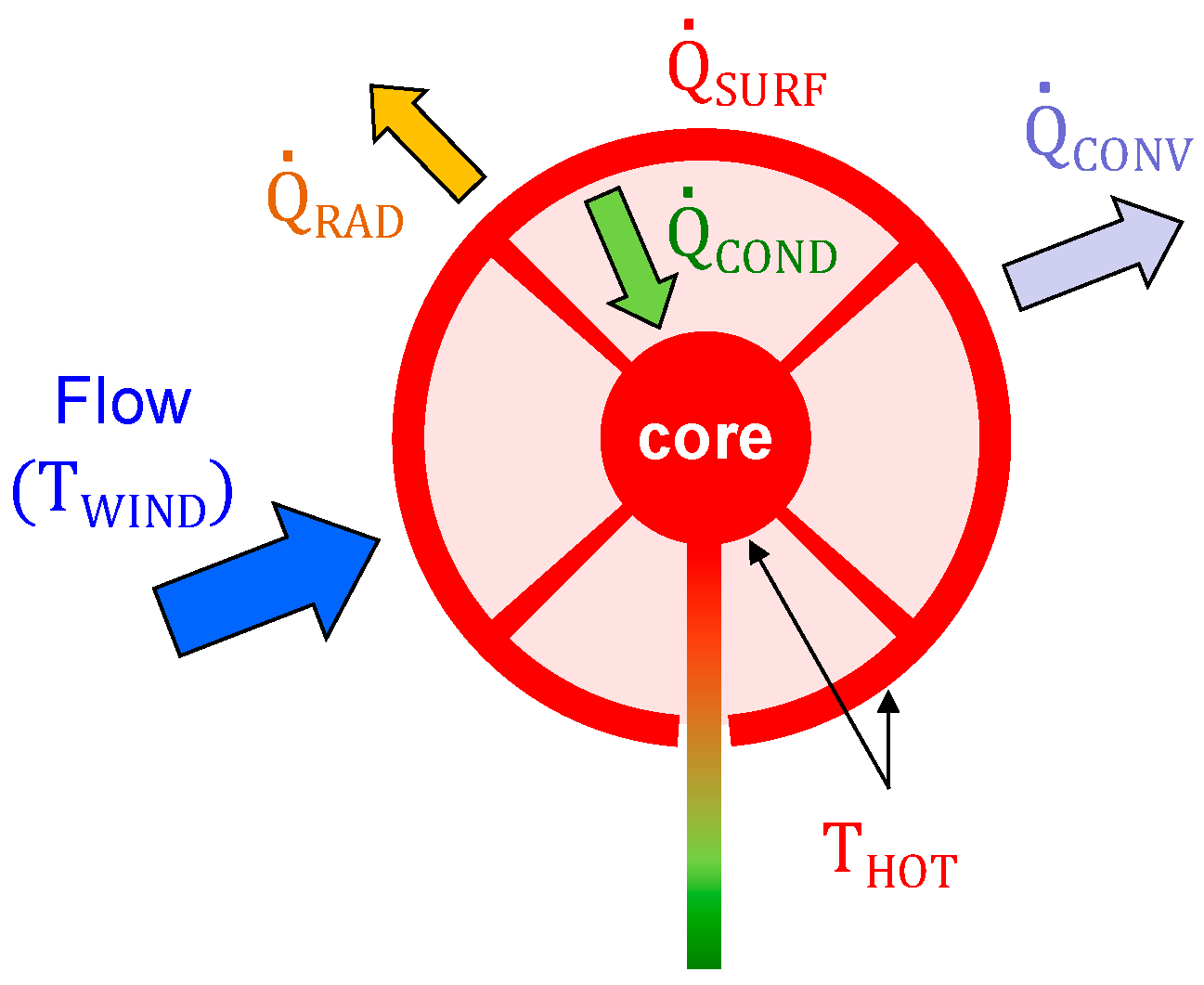
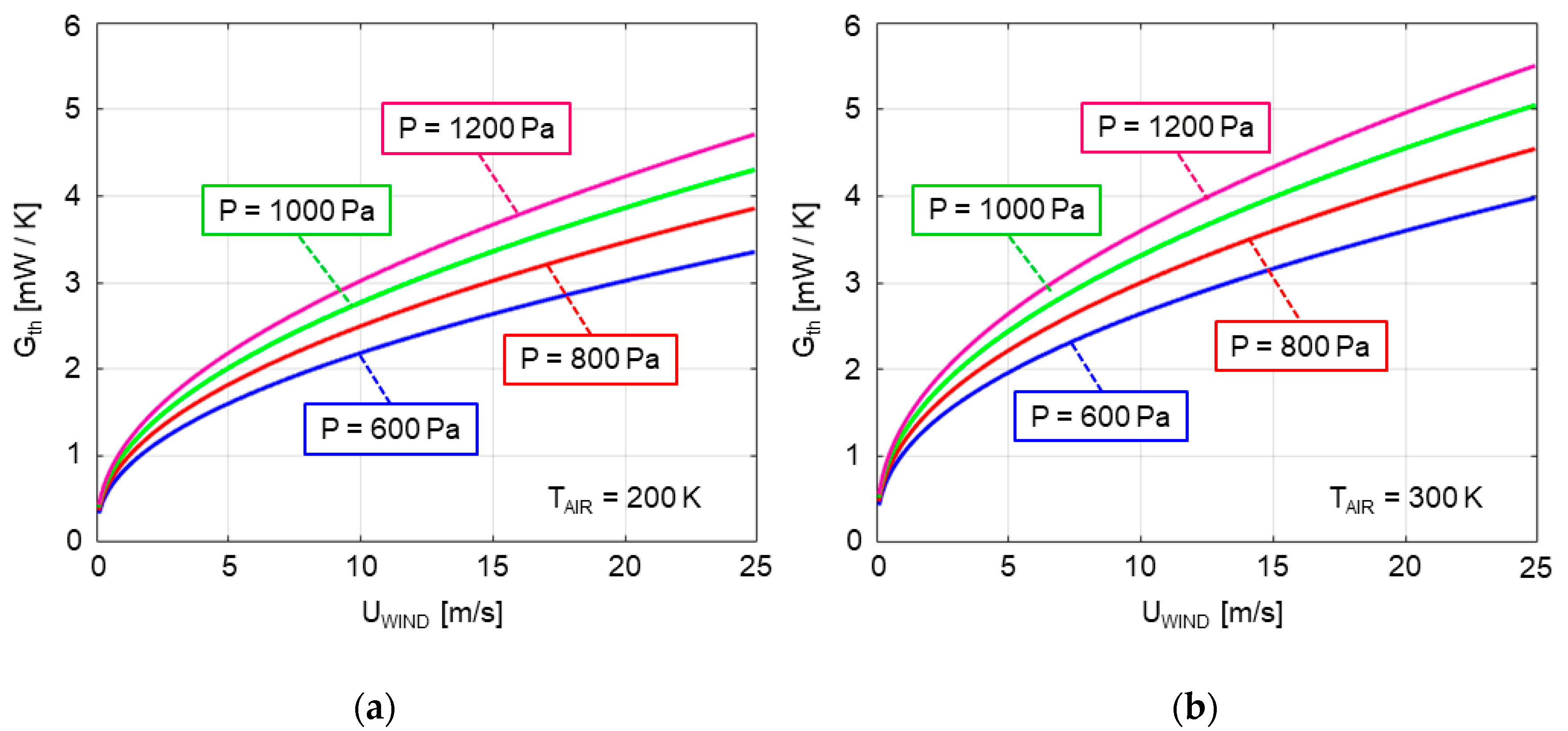
2.2. Modeling the Heat Transfer Response of the Sensor
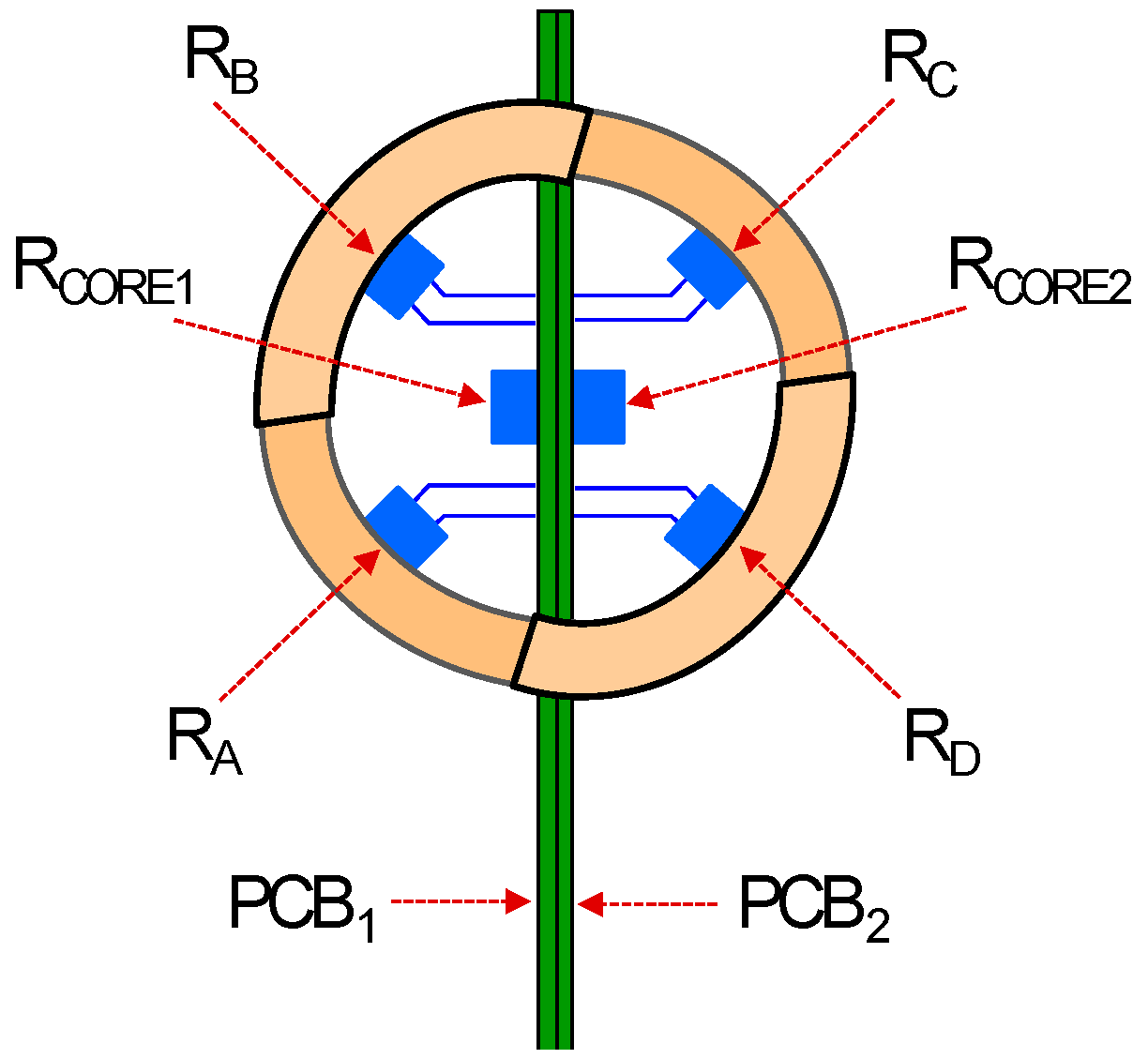
2.3. Structure, Operation, and Basic Features of the Sensor
3. Experiment Set 1: Sensor Performance under Typical Martian Conditions
3.1. Experimental Setup
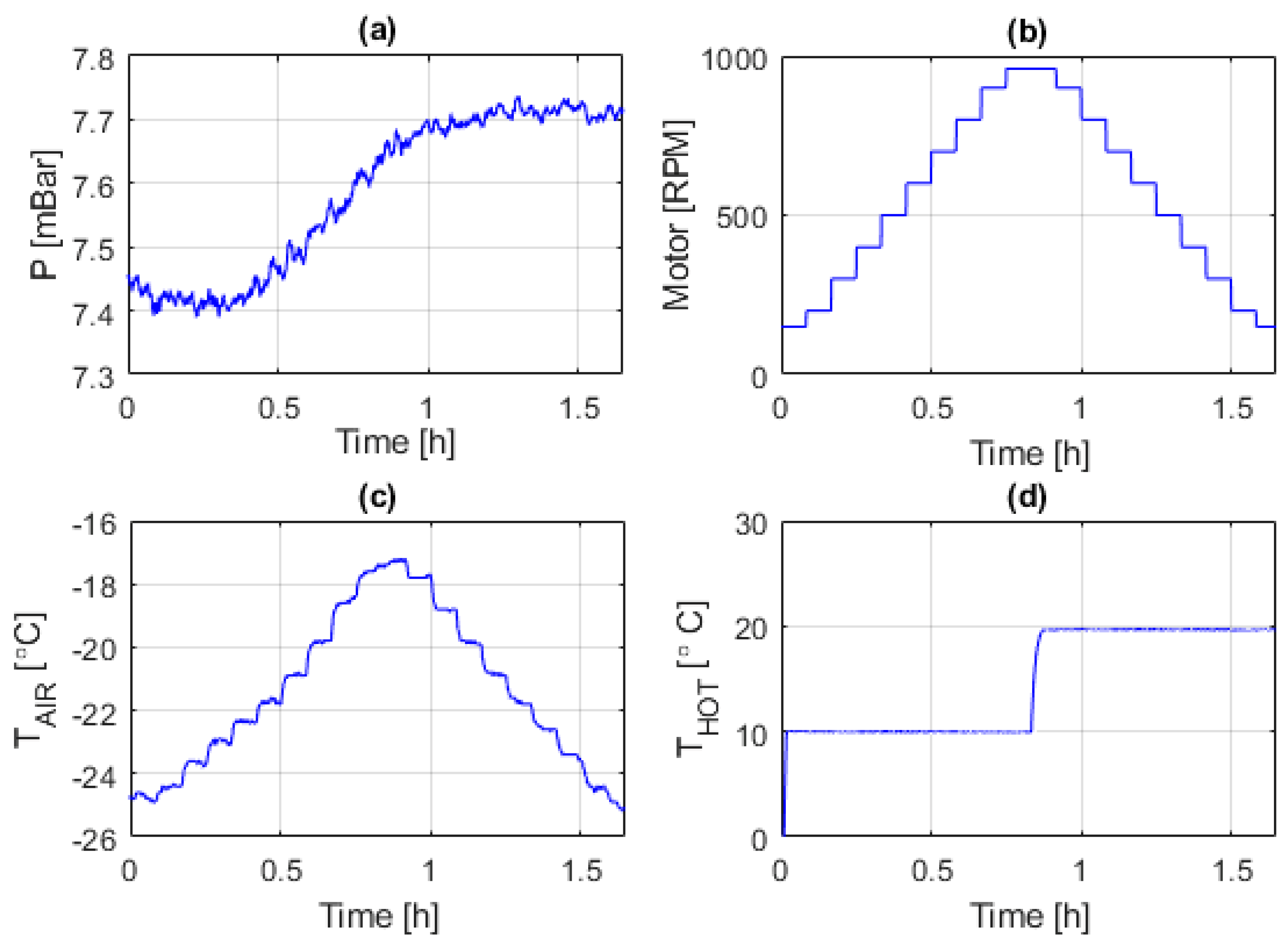
3.2. Results and Discussion
4. Wind Recovery: Inverse Algorithm for Laminar Regimes
5. Experiment Set 2: Sensor Performance under Extreme Martian Conditions
5.1. Experimental Setup
5.2. Towards the Dust Devil Scale: Reynolds Number Re ≤ 1000
5.3. Reaching and Surpassing the Dust Devil Scale: Reynolds Number Re > 1000
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mars Exploration Program Analysis Group. Mars Scientific Goals, Objectives, Investigations, and Priorities: 2020 Version. Available online: Mepag.jpl.nasa.gov/reports/MEPAGGoals_2020_MainText_Final.pdf (accessed on 27 August 2020).
- Millan, R.M.; Von Steiger, R.; Ariel, M.; Bartalev, S.; Borgeaud, M.; Campagnola, S.; Castillo-Rogez, J.C.; Fléron, R.; Gass, V.; Gregorio, A.; et al. Small satellites for space science. Adv. Space Res. 2019, 64, 1466–1517. [Google Scholar] [CrossRef]
- Nelis, J.L.D.; Elliott, C.T.; Campbell, K. “The Smartphone’s Guide to the Galaxy”: In Situ Analysis in Space. Biosensors 2018, 8, 96. [Google Scholar] [CrossRef] [Green Version]
- Sanz, R.; Fernández, A.B.; Dominguez, J.A.; Martin, B.; Díaz-Michelena, M. Gamma Irradiation of Magnetoresistive Sensors for Planetary Exploration. Sensors 2012, 12, 4447–4465. [Google Scholar] [CrossRef] [PubMed]
- Díaz-Michelena, M. Small Magnetic Sensors for Space Applications. Sensors 2009, 9, 2271–2288. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Scudero, S.; Vitale, G. A Review of the Capacitive MEMS for Seismology. Sensors 2019, 19, 3093. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Levchenko, I.; Bazaka, K.; Ding, Y.; Raitses, Y.; Mazouffre, S.; Henning, T.; Klar, P.J.; Shinohara, S.; Schein, J.; Garrigues, L.; et al. Space micropropulsion systems for Cubesats and small satellites: From proximate targets to furthermost frontiers. Appl. Phys. Rev. 2018, 5, 011104. [Google Scholar] [CrossRef]
- Romero-Diez, S.; Hantsche, L.; Pearl, J.M.; Hitt, D.L.; McDevitt, M.R.; Lee, P.C. A Single-Use Microthruster Concept for Small Satellite Attitude Control in Formation-Flying Applications. Aerospace 2018, 5, 119. [Google Scholar] [CrossRef] [Green Version]
- Stesina, F. Validation of a Test Platform to Qualify Miniaturized Electric Propulsion Systems. Aerospace 2019, 6, 99. [Google Scholar] [CrossRef] [Green Version]
- Harri, A.-M.; Pichkadze, K.; Zeleny, L.; Vazquez, L.; Schmidt, W.; Alexashkin, S.; Korablev, O.I.; Guerrero, H.; Heilimo, J.; Uspensky, M.; et al. The MetNet vehicle: A lander to deploy environmental stations for local and global investigations of Mars. Geosci. Instrum. Methods Data Syst. 2017, 6, 103–124. [Google Scholar] [CrossRef] [Green Version]
- Genzer, M.; Hieta, M.; Kestilä, A.; Haukka, H.; Arruego, I.; Apéstigue, V.; Manfredi, J.A.; Ortega, C.; Dominiguez, M.; Espejo, S.; et al. MiniPINS—Miniature Planetary In-situ Sensors. EGU Gen. Assem. Conf. Abstr 2020, 13250. [Google Scholar] [CrossRef]
- Post, M.A.; Li, J.; Quine, B.M. Planetary micro-rover operations on Mars using a Bayesian framework for inference and control. Acta Astronaut. 2016, 120, 295–314. [Google Scholar] [CrossRef] [Green Version]
- Takahashi, R.; Sakagami, R.; Wachi, A.; Kasai, Y.; Nakasuka, S. The conceptual design of a novel, small and simple Mars lander. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018. [Google Scholar] [CrossRef]
- Fantino, E.; Grassi, M.; Pasolini, P.; Causa, F.; Molfese, C.; Aurigemma, R.; Cimminiello, N.; De La Torre, D.; Dell’Aversana, P.; Esposito, F.; et al. The Small Mars System. Acta Astronaut. 2017, 137, 168–181. [Google Scholar] [CrossRef]
- 1Grip, H.F.; Lam, J.; Bayard, D.S.; Conway, D.T.; Singh, G.; Brockers, R.; Delaune, J.H.; Matthies, L.H.; Malpica, C.; Brown, T.L.; et al. Flight Control System for NASA’s Mars Helicopter. AIAA Scitech 2019 Forum 2019. [Google Scholar] [CrossRef] [Green Version]
- Cutts, J.A.; Matthies, L.H.; Thompson, T.W. Venus Aerial Platform Modeling Needs. In Proceedings of the Venus Modeling Workshop, Cleveland, OH, USA, 9–11 May 2017; p. 8014. [Google Scholar]
- Glaze, L.S.; Wilson, C.F.; Zasova, L.V.; Nakamura, M.; Limaye, S. Future of Venus Research and Exploration. Space Sci. Rev. 2018, 214, 89. [Google Scholar] [CrossRef] [Green Version]
- Neish, C.; Lorenz, R.; Turtle, E.P.; Barnes, J.W.; Trainer, M.G.; Stiles, B.; Kirk, R.; Hibbitts, C.A.; Malaska, M.J. Strategies for Detecting Biological Molecules on Titan. Astrobiology 2018, 18, 571–585. [Google Scholar] [CrossRef]
- Kowalski, L.; Atienza, M.T.; Gorreta, S.; Jimenez, V.; Dominguez-Pumar, M.; Silvestre, S.; Castaner, L.M. Spherical Wind Sensor for the Atmosphere of Mars. IEEE Sens. J. 2015, 16, 1887–1897. [Google Scholar] [CrossRef] [Green Version]
- Hess, S.L.; Henry, R.M.; Leovy, C.B.; Ryan, J.A.; Tillman, J.E. Meteorological results from the surface of Mars: Viking 1 and 2. J. Geophys. Res. Space Phys. 1977, 82, 4559–4574. [Google Scholar] [CrossRef]
- Murphy, J.R.; Leovy, C.B.; Tillman, J.E. Observations of Martian surface winds at the Viking Lander 1 Site. J. Geophys. Res. Space Phys. 1990, 95, 14555. [Google Scholar] [CrossRef]
- Ringrose, T.; Towner, M.; Zarnecki, J. Convective vortices on Mars: A reanalysis of Viking Lander 2 meteorological data, sols 1–60. Icarus 2003, 163, 78–87. [Google Scholar] [CrossRef] [Green Version]
- Schofield, J.T.; Barnes, J.R.; Crisp, D.; Haberle, R.M.; Larsen, S.E.; Magalhães, J.A.; Murphy, J.R.; Seiff, A.; Wilson, G. The Mars Pathfinder Atmospheric Structure Investigation/Meteorology (ASI/MET) Experiment. Science 1997, 278, 1752–1758. [Google Scholar] [CrossRef] [Green Version]
- Sullivan, R.; Greeley, R.; Kraft, M.; Wilson, G.; Golombek, M.; Herkenhoff, K.; Murphy, J.; Smith, P. Results of the Imager for Mars Pathfinder windsock experiment. J. Geophys. Res. Space Phys. 2000, 105, 24547–24562. [Google Scholar] [CrossRef]
- Taylor, P.A.; Catling, D.C.; Daly, M.; Dickinson, C.S.; Gunnlaugsson, H.; Harri, A.-M.; Lange, C.F.; Daly, M.G. Temperature, pressure, and wind instrumentation in the Phoenix meteorological package. J. Geophys. Res. Space Phys. 2008, 113, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Holstein-Rathlou, C.; Gunnlaugsson, H.P.; Merrison, J.; Bean, K.M.; Cantor, B.A.; Davis, J.A.; Davy, R.; Drake, N.B.; Ellehoj, M.D.; Goetz, W.; et al. Winds at the Phoenix landing site. J. Geophys. Res. Space Phys. 2010, 115, E00E18. [Google Scholar] [CrossRef]
- Viúdez-Moreiras, D.; Gómez-Elvira, J.; Newman, C.; Navarro, S.; Marin, M.; Torres, J.; De La Torre-Juárez, M. Gale surface wind characterization based on the Mars Science Laboratory REMS dataset. Part I: Wind retrieval and Gale’s wind speeds and directions. Icarus 2019, 319, 909–925. [Google Scholar] [CrossRef]
- Viúdez-Moreiras, D.; Gómez-Elvira, J.; Newman, C.; Navarro, S.; Marin, M.; Torres, J.; De La Torre-Juárez, M. Gale surface wind characterization based on the Mars Science Laboratory REMS dataset. Part II: Wind probability distributions. Icarus 2019, 319, 645–656. [Google Scholar] [CrossRef]
- Newman, C.; Gómez-Elvira, J.; Marin, M.; Navarro, S.; Torres, J.; Richardson, M.I.; Battalio, M.; Guzewich, S.D.; Sullivan, R.; De La Torre, M.; et al. Winds measured by the Rover Environmental Monitoring Station (REMS) during the Mars Science Laboratory (MSL) rover’s Bagnold Dunes Campaign and comparison with numerical modeling using MarsWRF. Icarus 2017, 291, 203–231. [Google Scholar] [CrossRef] [PubMed]
- Banfield, D.; The TWINS Team; Rodriguez-Manfredi, J.A.; Russell, C.T.; Rowe, K.M.; Leneman, D.; Lai, H.R.; Cruce, P.R.; Means, J.D.; Johnson, C.L.; et al. InSight Auxiliary Payload Sensor Suite (APSS). Space Sci. Rev. 2018, 215, 4. [Google Scholar] [CrossRef]
- Day, M.D.; Rebolledo, L. Intermittency in Wind-Driven Surface Alteration on Mars Interpreted from Wind Streaks and Measurements by InSight. Geophys. Res. Lett. 2019, 46, 12747–12755. [Google Scholar] [CrossRef]
- Banfield, D.; Spiga, A.; Newman, C.; Forget, F.; Lemmon, M.T.; Lorenz, R.D.; Murdoch, N.; Viúdez-Moreiras, D.; Pla-Garcia, J.; Garcia, R.F.; et al. The atmosphere of Mars as observed by InSight. Nat. Geosci. 2020, 13, 190–198. [Google Scholar] [CrossRef]
- Seismic and Atmospheric Exploration of Venus (SAEVe). Final Report. June 2018. Available online: www.lpi.usra.edu/vexag/reports/SAEVe-6-25-2018.pdf (accessed on 27 July 2020).
- Wrbanek, J.D.; Fralick, G.C. Thin Film Physical Sensor Instrumentation Research and Development at NASA Glenn Research Center. NASA/TM—2006-214395, ISA# TP06IIS023; September 2006. Available online: Ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20060049130.pdf (accessed on 27 September 2020).
- Banfield, D.; Schindel, D.W.; Tarr, S.; Dissly, R.W. A Martian acoustic anemometer. J. Acoust. Soc. Am. 2016, 140, 1420–1428. [Google Scholar] [CrossRef]
- White, R.D.; Neeson, I.; Schmid, E.S.; Merrison, J.; Iversen, J.J.; Banfield, D. Flow Testing of a Sonic Anemometer for the Martian Environment. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Dominguez-Pumar, M.; Jimenez, V.; Ricart, J.; Kowalski, L.; Torres, J.; Navarro, S.; Romeral, J.; Castañer, L. A hot film anemometer for the Martian atmosphere. Planet. Space Sci. 2008, 56, 1169–1179. [Google Scholar] [CrossRef]
- Gómez-Elvira, J.; Armiens, C.; Castañer, L.; Domínguez, M.; Genzer, M.; Gómez, F.; Haberle, R.; Harri, A.-M.; Jiménez, V.; Kahanpää, H.; et al. REMS: The Environmental Sensor Suite for the Mars Science Laboratory Rover. Space Sci. Rev. 2012, 170, 583–640. [Google Scholar] [CrossRef]
- Dominguez-Pumar, M.; Ricart, J.; Moreno, A.; Contestí, X.; Garriga, S. Low cost PCB thermal sigma–delta air flowmeter with improved thermal isolation. Sens. Actuators A Phys. 2005, 121, 388–394. [Google Scholar] [CrossRef]
- Atienza, M.-T.; Kowalski, L.; Gorreta, S.; Jiménez, V.; Domínguez-Pumar, M. Thermal dynamics modeling of a 3D wind sensor based on hot thin film anemometry. Sens. Actuators A Phys. 2018, 272, 178–186. [Google Scholar] [CrossRef] [Green Version]
- Dominguez-Pumar, M.; Atienza, M.-T.; Kowalski, L.; Novio, S.; Gorreta, S.; Jimenez, V.; Silvestre, S. Heat Flow Dynamics in Thermal Systems Described by Diffusive Representation. IEEE Trans. Ind. Electron. 2016, 64, 664–673. [Google Scholar] [CrossRef] [Green Version]
- Atienza, M.-T.; Kowalski, L.; Gorreta, S.; Jiménez, V.; Castañer, L.M.; Domínguez-Pumar, M. Sliding mode analysis applied to improve the dynamical response of a spherical 3D wind sensor for Mars atmosphere. Sens. Actuators A: Phys. 2017, 267, 342–350. [Google Scholar] [CrossRef] [Green Version]
- Merrison, J. Environmental Wind Tunnels. Available online: https://cdn.intechweb.org/pdfs/13558.pdf (accessed on 2 June 2020).
- Holstein-Rathlou, C.; Merrison, J.; Iversen, J.J.; Jakobsen, A.B.; Nicolajsen, R.; Nørnberg, P.; Rasmussen, K.R.; Merlone, A.; Lopardo, G.; Hudson, T.; et al. An Environmental Wind Tunnel Facility for Testing Meteorological Sensor Systems. J. Atmos. Ocean. Technol. 2014, 31, 447–457. [Google Scholar] [CrossRef]
- Rodriguez, I.; Balcázar, N.; Soria, M.; Gómez, S.; Dominguez-Pumar, M.; Kowalski, L. Fluid dynamics and heat transfer in the wake of a sphere. Int. J. Heat Fluid Flow 2019, 76, 141–153. [Google Scholar] [CrossRef]
- Domínguez Pumar, M.; Kowalski, L.; Jiménez Serres, V.; Rodríguez Pérez, I.M.; Soria Guerrero, M. Exploring the performance of a miniature 3D wind sensor under extreme Martian winds up to the Dust Devil scale. In Proceedings of the IPPW-2019: 16th International Planetary Probe Workshop, Oxford University, Oxford, UK, 8–12 July 2019; pp. 11–12. [Google Scholar]
- Kowalski, L.; Gorreta Mariné, S.; Atienza García, M.T.; Jiménez Serres, V.; Castañer Muñoz, L.M.; Domínguez Pumar, M. Testing campaign of a Martian spherical wind sensor at the AWTSII Wind Tunnel Facility. In Proceedings of the IPPW 2018: International Planetary Probe Workshop, Boulder, CO, USA, 1–15 June 2018; pp. 107–108. [Google Scholar]
- Karniadakis, G.; Beskok, A.; Aluru, N.; Antman, S.S.; Marsden, J.E.; Sirovich, L. Microflows and Nanoflows: Fundamentals and Simulation; Springer: Berlin/Heidelberg, Germany, 2005; ISBN 978-0-387-28676-1. [Google Scholar]
- De Beule, C.; Wurm, G.; Kelling, T.; Küpper, M.; Jankowski, T.; Teiser, J. The martian soil as a planetary gas pump. Nat. Phys. 2013, 10, 17–20. [Google Scholar] [CrossRef] [Green Version]
- Incropera, F.P.; Dewitt, D. Introduction to Heat Transfer, 6th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2011; ISBN 978-047-091-786-2. [Google Scholar]
- Feng, Z.-G.; Michaelides, E.E. A numerical study on the transient heat transfer from a sphere at high Reynolds and Peclet numbers. Int. J. Heat Mass Transf. 2000, 43, 219–229. [Google Scholar] [CrossRef]
- Holstein-Rathlou, C.; Merrison, J.P.; Iversen, J.J.; Nørnberg, P. Quantification of wind flow in the European Mars Simulation Wind Tunnel Facility. Geophys. Res. Abstr. 2012, 14, EGU-4819. [Google Scholar]
- Kowalski, L.; Molina, M.G. Hypobaric chamber for wind sensor testing in Martian conditions. In Proceedings of the 8th Spanish Conference on Electron Devices, CDE’2011, Palma de Mallorca, Spain, 8–11 February 2011; pp. 1–4. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Size | Mass |
|---|---|---|
| Sensor head | Ø 10 mm | 3 g |
| 2 × PCB | 230 × 35 mm | 12 g |
| PCB connector | 55 × 25 × 8 mm | 7 g |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Domínguez-Pumar, M.; Kowalski, L.; Jiménez, V.; Rodríguez, I.; Soria, M.; Bermejo, S.; Pons-Nin, J. Analyzing the Performance of a Miniature 3D Wind Sensor for Mars. Sensors 2020, 20, 5912. https://doi.org/10.3390/s20205912
Domínguez-Pumar M, Kowalski L, Jiménez V, Rodríguez I, Soria M, Bermejo S, Pons-Nin J. Analyzing the Performance of a Miniature 3D Wind Sensor for Mars. Sensors. 2020; 20(20):5912. https://doi.org/10.3390/s20205912
Chicago/Turabian StyleDomínguez-Pumar, Manuel, Lukasz Kowalski, Vicente Jiménez, Ivette Rodríguez, Manel Soria, Sandra Bermejo, and Joan Pons-Nin. 2020. "Analyzing the Performance of a Miniature 3D Wind Sensor for Mars" Sensors 20, no. 20: 5912. https://doi.org/10.3390/s20205912
APA StyleDomínguez-Pumar, M., Kowalski, L., Jiménez, V., Rodríguez, I., Soria, M., Bermejo, S., & Pons-Nin, J. (2020). Analyzing the Performance of a Miniature 3D Wind Sensor for Mars. Sensors, 20(20), 5912. https://doi.org/10.3390/s20205912