1. Introduction
Gait disabilities are mainly caused by stroke, affecting the quality of life of 13 million people per year worldwide [
1,
2]. The ankle-foot deformity is the most detrimental abnormality for gait ability post-stroke, with an incidence of 10–20% [
3]. As a consequence, post-stroke patients adopt compensatory, energetically inefficient gait patterns, leading to professional and social exclusion and increased risk of falling [
1,
3].
Stroke survivors may recover their motor ability through gait rehabilitation. Gait rehabilitation driven by exoskeletons allows intensive, user-adaptive, and repetitive gait training; thus, increasing effectiveness and accelerating long-term recovery [
4]. This gait rehabilitation follows a bottom-up rehabilitative approach, aiming to influence the central nervous system (top)—neuroplasticity—through actuation on the lower limbs (bottom) [
5].
Biofeedback systems (BSs) are robotic devices that measure gait-related unconscious parameters through sensors and feedback this information to users in real-time through visual, auditory, and/or haptic cues, using appropriate actuators [
6]. Through the BSs, patients may be aware of their abnormal motor behavior and they are intensively and repetitively encouraged to self-control it towards recovery [
6]. Complementary to exoskeletons, BSs support a top-down rehabilitative approach, exerting direct action on the central nervous system to recover peripheral functions [
5]. The adjunctive use of BSs during gait rehabilitation driven by exoskeletons can accelerate post-stroke long-term motor recovery once the BSs potentiate neuroplasticity by encouraging patients’ active motor relearning and preventing patient’s motor dependence on the exoskeleton [
5].
Physiotherapist-oriented control strategies can be coupled to BSs so physiotherapists can assess patient’s performance easily and objectively during the therapy. This is particularly important during gait rehabilitation driven by exoskeletons once physiotherapists cannot have the traditional physical contact with the patient’s limbs [
7]. Physiotherapists’ involvement during therapy allows additional support to patients, assuring safe and effective use of the robotic devices, and fostering patient’s motivation [
8].
Some studies are reporting the promising use of biofeedback during post-stroke gait rehabilitation driven by exoskeletons. Most of them include gait training driven by hip and/or knee exoskeletons (EMG feedback in [
9] and human-robot interaction torque feedback in [
10]). EMG feedback is provided through a non-wearable display of colored stripes (one stripe per muscle) portioned into 16 stages within the gait cycle [
9]. The stripes’ color represents over-activation, under-activation, or optimal muscle contraction according to a reference dataset [
9]. Muscle contraction is measured through electromyographic sensors that require a time-consuming preparation. The human-robot interaction torque feedback is given by a non-wearable display of a smiley character with a mouth’s length and shape modulated according to the averaged human-robot interaction torque and a pre-defined threshold, respectively [
10]. Human-robot interaction torque is measured by force sensors embedded in the exoskeleton’s structure and it does not require any preparation. Moreover, human-robot interaction torque feedback was showed to be more effective to improve patient-exoskeleton compliance than EMG feedback [
9].
Additionally, the study [
10] proposed control strategies to foster the physiotherapist’s involvement during gait rehabilitation driven by exoskeletons through a physiotherapist-oriented, non-wearable display of the patient-exoskeleton interaction torque. The display includes technical graphs for hip and knee joints, and swing and stance phases [
10].
Only one study reported the use of biofeedback with an ankle-foot exoskeleton, using a game based on measured ankle angle to encourage patients to perform simple dorsiflexion and/or plantar flexion movements while sitting (which is not functional gait training) [
11]. A gyrocopter character is displayed on a non-wearable screen and moves upwards/downwards according to the user’s dorsiflexion/plantar flexion movements that should follow the trajectory delineated through gas bottle characters [
11].
Based on actual literature advances, it is still needed to develop (i) biofeedback control strategies for functional gait training driven by ankle–foot exoskeletons to accelerate motor recovery of post-stroke patients with an ankle-foot deformity; (ii) control strategies to foster physiotherapist involvement for additional patient support; and (iii) fully wearable biofeedback solutions to enable ambulatory use and daily practice.
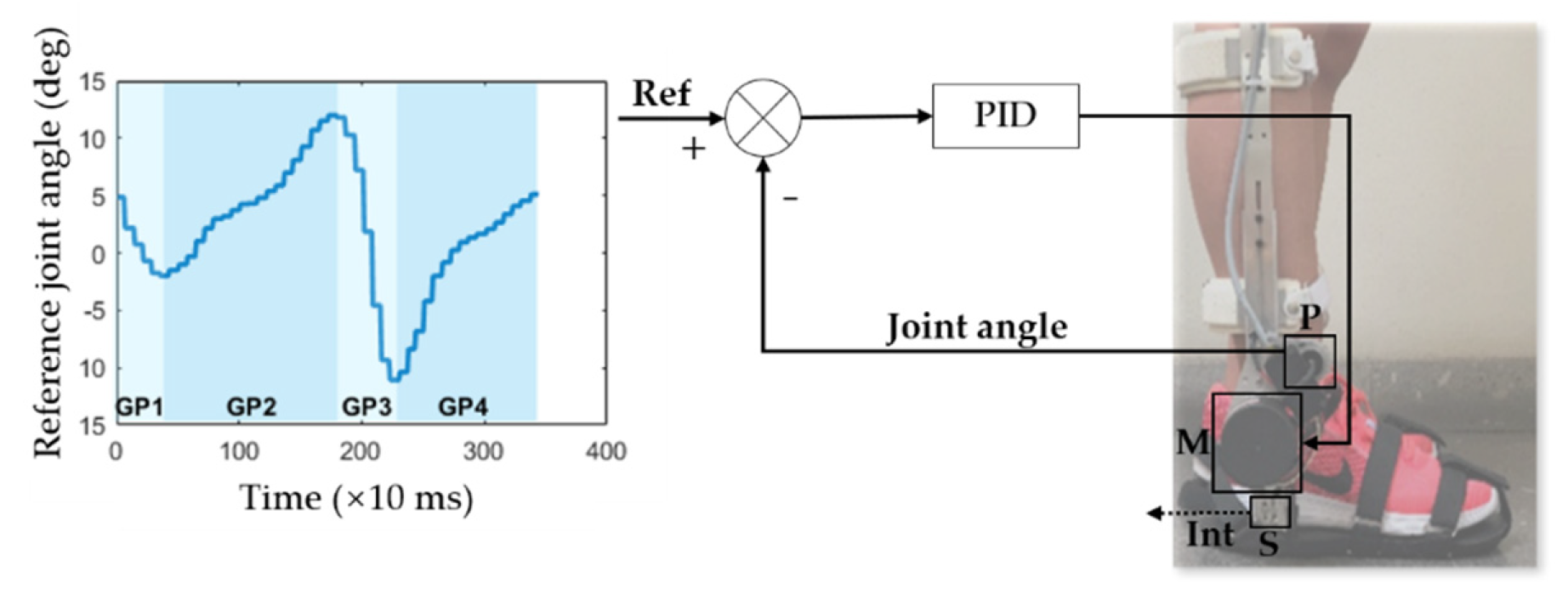
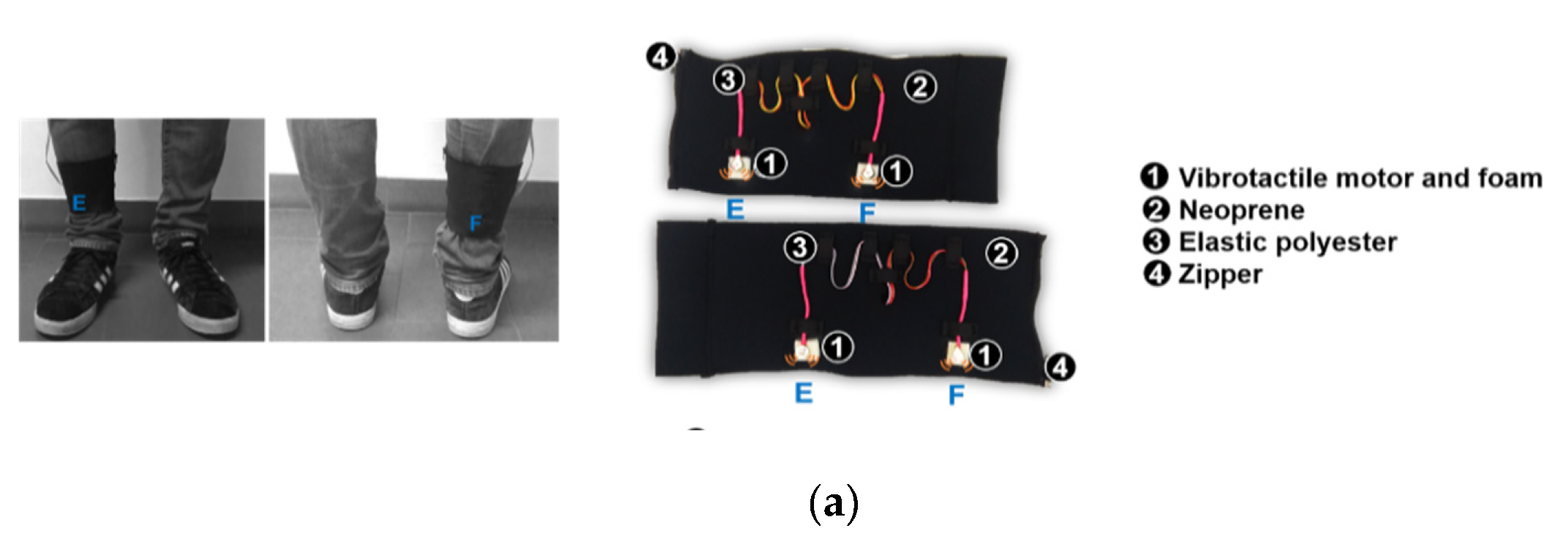
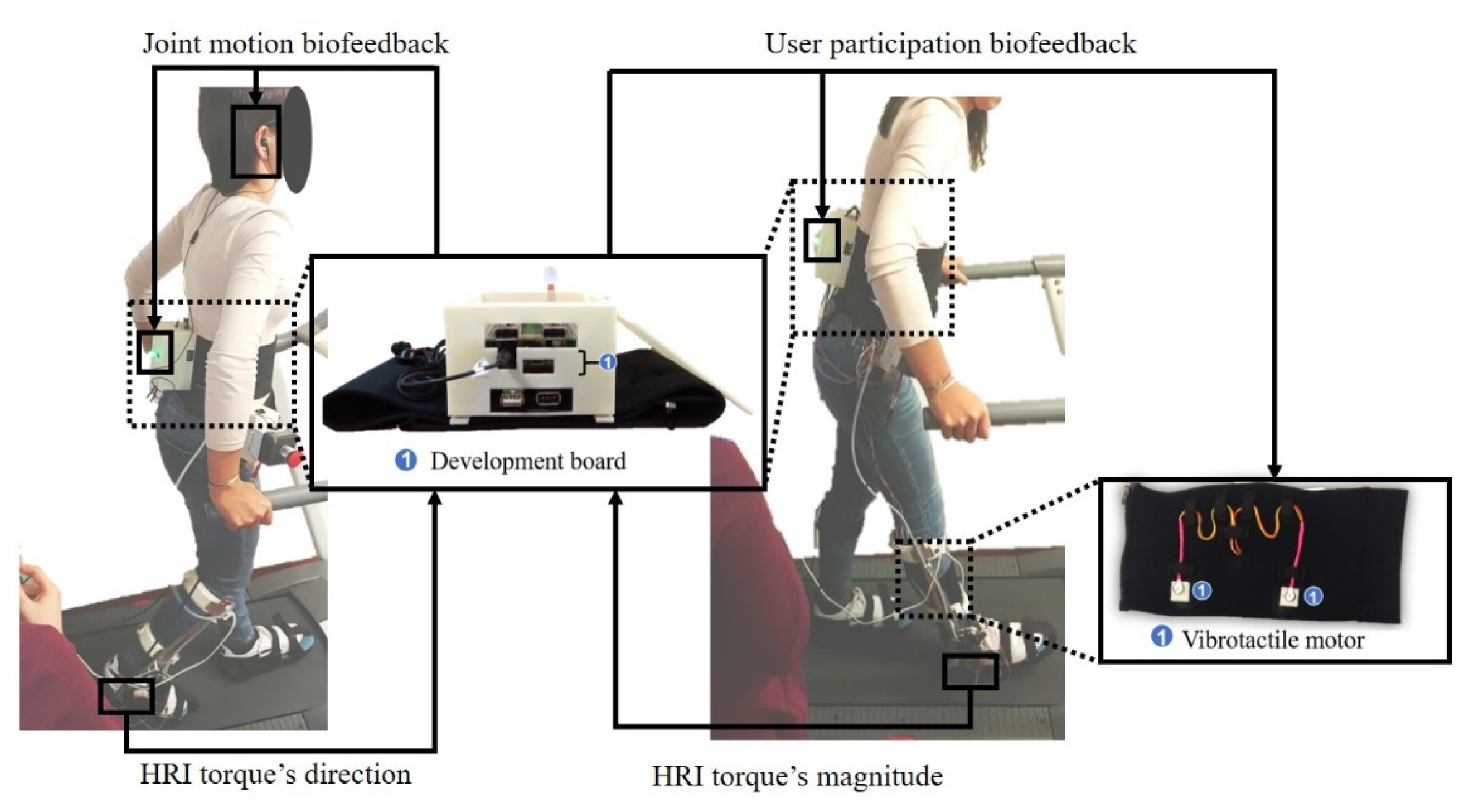
This work proposes two novel biofeedback control strategies—joint motion and user participation strategies—to complement gait rehabilitation driven by ankle-foot exoskeletons by improving patient–exoskeleton compliance; this so that patients can relearn to perform a healthy gait pattern, regaining their quality of life. Wearable auditory and vibrotactile cues are provided every time that the user interacts with the exoskeleton in the opposite direction to (joint motion strategy) and following (user participation strategy) the exoskeleton’s direction of movement, respectively. The joint motion strategy aims to encourage users to not interact with the exoskeleton in the opposite direction to the exoskeleton’s direction of movement. The user participation strategy encourages users to reduce the magnitude of the interaction torque. Parallel strategies are additionally proposed so a physiotherapist can follow in real-time the patient’s gait training through wearable visual cues. The biofeedback is supplied by a wearable system, able to be used with different exoskeletons due to its open-architecture and to provide multimodal cues. It includes visual cues from a Light-Emitting Diode oriented to the physiotherapists, and auditory and vibrotactile cues from an earphone and elastic vibrotactile shank bands, respectively, both oriented to the patients. Detailed information about the design of the used BS can be found in [
12].
A preliminary pre-post study design was performed to prove the concept with healthy subjects, using a fully wearable BS and a unilateral (right side) ankle-foot exoskeleton. This experimental evaluation allowed to pursue the following research question: “Are BSs able to improve human-robot compliance during gait training driven by ankle-foot exoskeletons?”. This study contributes by innovatively providing research evidence concerning the promising use of BSs during gait training driven by ankle-foot exoskeletons through human-robot interaction-based control strategies involving patient and physiotherapist-oriented wearable cues.
3. Results
Table 2 shows the training gait phases for both biofeedback strategies (modal training gait phase: 3 for joint motion and 1 for user participation strategies) and the training threshold module (4 ± 1 Nm) for user participation strategy.
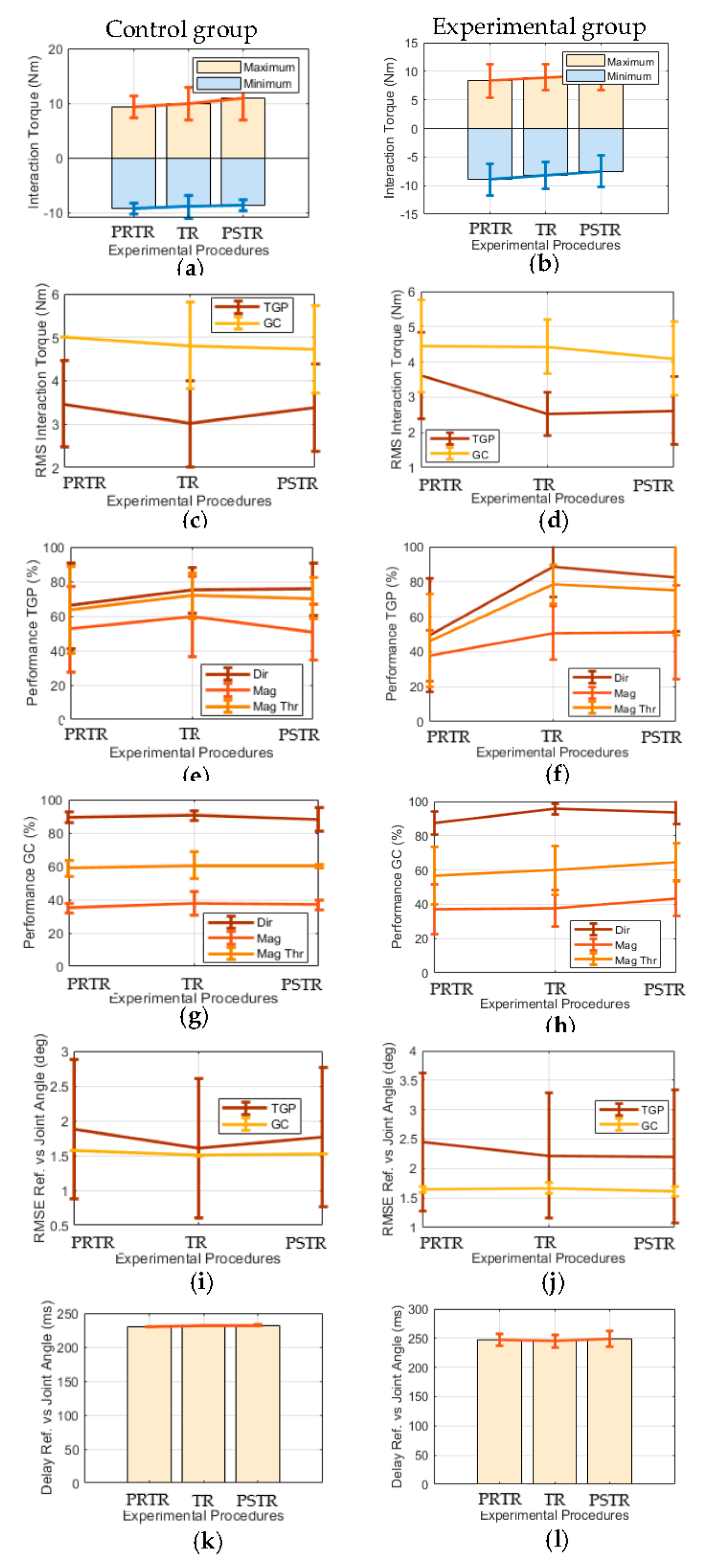
Figure 4 illustrates the mean and standard deviation of the acquired metrics (M1–M5) per experimental procedure for both the experimental and control groups (
Figure S1 and
Table S1 present complementary results individualized by each participant) regarding the joint motion biofeedback strategy.
Table 3 complements these results by presenting the
p-values of the statistical tests for each metric and group between PRTR and TR and PRTR and PSTR. As can be seen in
Table 3, there were no statistically significant results for both groups regarding the joint motion biofeedback strategy. However, the most representative results (
p-value < 0.10) of the experimental group indicate greater improvements than the control group in the following metrics: (i)
Performance Dir increased for training gait phase between PRTR and TR (
p-value = 0.07 vs.
p-value = 0.27) and between PRTR and PSTR (
p-value = 0.07 vs.
p-value = 0.26), and for gait cycle between PRTR and TR (
p-value = 0.07 vs.
p-value = 0.31); (ii)
Performance Mag increased for gait cycle between PRTR and PSTR (
p-value = 5.9 × 10
−2 vs.
p-value = 0.34); and (iii)
Performance Mag Thr increased for the training gait phase between PRTR and TR (
p-value = 0.09 vs.
p-value = 0.30) and between PRTR and PSTR (
p-value = 0.07 vs.
p-value = 0.39).
Figure 5 shows the mean and standard deviation of the computed metrics (M1–M5) per procedure in user participation biofeedback strategy for the experimental and control groups (
Figure S1 and
Table S2 present complementary results individualized by each participant).
Table 4 complements these results presenting the
p-values of the statistical tests for each metric and group between PRTR and TR and PRTR and PSTR. Regarding the user participation biofeedback strategy,
Table 4 demonstrates that the experimental group increased significantly and the control group non-significantly: (i) the minimum interaction torque between PRTR and PSTR (
p-value = 0.04 vs.
p-value = 0.14); (ii) the
Performance Mag Thr for training gait phase between PRTR and TR (
p-value = 0.03 vs.
p-value = 0.53); and (iii) the
Performance Mag for training gait phase between PRTR and PSTR (
p-value = 4.56 × 10
−4 vs.
p-value = 0.08). Moreover, the experimental group increased more significantly than the control group the
Performance Mag Thr for the training gait phase between PRTR and PSTR (
p-value = 8.59 × 10
−3 vs.
p-value = 0.01).
Additionally, the most representative results (p-value < 0.10) of the experimental group also include greater improvements than the control group in the following metrics: (i) minimum interaction torque increased between PRTR and TR (p-value = 0.07 vs. p-value = 0.46); (ii) the RMS of the interaction torque decreased for the training gait phase between PRTR and TR (p-value = 0.07 vs. p-value = 0.32) and for the gait cycle between PRTR and PSTR (p-value = 0.08 vs. p-value = 0.19); (iii) Performance Mag increased for the training gait phase between PRTR and TR (p-value = 5.57 × 10−2 vs. p-value = 0.77); and (iv) Performance Mag Thr increased for the gait cycle between PRTR and TR (p-value = 5.50 × 10−2 vs. p-value = 0.65) and between PRTR and PSTR (p-value = 0.08 vs. p-value = 0.68). On the other hand, the Performance Dir decreased and increased for the training gait phase between PRTR and TR of experimental and control groups, respectively (p-value = 0.07, p-value = 0.20).
As can be perceived by analyzing
Figure 2 and
Figure 3, the control group presents similar results to the experimental group concerning the PT procedure for all metrics and both biofeedback strategies.
Table 5 presents the comments of the participants from the experimental group regarding the biofeedback training with joint motion and user participation strategies, and comments of the technical person who followed the participants during the experimental protocol related to physiotherapist-oriented control strategies. In general, the participants referred to that (i) the biofeedback (joint motion and user participation biofeedback strategies) increased their motivation to perform the gait training; (ii) they felt more compliant with the exoskeleton after the use of the biofeedback; (iii) they demonstrated a positive appreciation concerning the auditory and vibrotactile cues; and (iv) they felt confident to achieve a better performance with longer biofeedback training. The technical person commented on the promising use of physiotherapist-oriented control strategies once (i) it is very difficult to perceive the human-robot compliance through visual inspection; and (ii) the visual cues from the BS are intuitive, enabling timely instructions for guiding the user’s motor performance.
Table 6 displays the answers of the experimental group concerning the usability questionnaire (Q1–Q5) about both biofeedback strategies. Most of the participants strongly agreed/agreed with the sentence “I think that I can walk more compliantly with the exoskeleton after using the BS”, agreed that “I need more time to learn how the BS works before I can get going with it”, disagreed with the sentence “I need to learn other things before I can get going with the BS”, and agreed with the sentence “After understanding how the BS works, I think that I need the support of a physiotherapist along with gait training”. However, there is no consensus concerning the timing needed to learn how to use the BS, as the participants equally reported that they agreed and disagreed with the sentence “I imagine that most people will learn to use the BS very quickly”.
4. Discussion
This work proposes two novel human-robot interaction-based biofeedback strategies to complement gait rehabilitation driven by ankle–foot exoskeletons following the hypothesis that human-robot interaction-based biofeedback can improve patient compliance with the exoskeleton; thus, relearning to perform a healthy gait pattern. Therefore, the timing for motor recovery of post-stroke patients with ankle-foot deformities is accelerated, and they more quickly regain quality of life. This hypothesis is also followed by [
10] with hip and knee exoskeletons, and it is reinforced by [
9], concluding that human-robot interaction-based biofeedback is more effective than EMG-based biofeedback to improve patient’s compliance with the robot movement. Contrarily to [
9,
10,
11], the proposed strategies followed a user-centered design, allowing to personalize the biofeedback (namely, the training gait phase and training threshold) according to the user’s imminent needs; thus, aiming for low cognitive effort and user satisfaction. Moreover, contrarily to [
9,
10,
11], the proposed biofeedback strategies and physiotherapist-oriented control strategies are implemented in a fully wearable BS and ankle-foot exoskeleton, allowing ambulatory use and daily practice.
A pre-post controlled study was performed with healthy participants to conclude about the potential of the proposed biofeedback strategies to foster human-robot compliance during gait training driven by an ankle-foot exoskeleton. Thus, contrarily to [
10], this study controls the exoskeleton’s effects on human-robot interaction torque by comparing human-robot interaction torque-based metrics during walking trials with biofeedback and the exoskeleton’s assistance (experimental group) versus walking trials with the exoskeleton’s assistance but without biofeedback (control group). The similar results of all acquired metrics for the PRTR procedure between the experimental and control groups (
Figure 4 and
Figure 5) prove the balancing between the groups before the use of biofeedback regarding the outcomes of the study, fortifying the control of the exoskeleton’s effects on these outcomes.
This study determined the effects of the proposed biofeedback strategies on healthy participants as in [
11]. The healthy participants were challenged to reduce their interaction with the ankle–-oot exoskeleton through active walking, aiming to improve human-robot compliance. It is hypothesized that human-robot compliance improvement will foster motor recovery in post-stroke patients. The conclusions of this study are reinforced by statistical analysis contrarily to [
10]. Two-sided statistical tests were performed to conclude about the statistically significant effects of the proposed biofeedback strategies. This approach evaluated the statistically significant results in both directions (greater than or less than), preventing to exclude statistically significant results in the non-expected direction.
According to the modal training gait phase, most participants had difficulties to be compliant with the exoskeleton’s movement during plantar-flexion gait phases: between the heel-off and toe-off events, and between the heel-strike and flat-foot events, respectively. The training thresholds (
Table 2) show that all healthy participants had difficulties to be compliant with the exoskeleton movement because all are in module above the baseline interaction torque of the used ankle-foot exoskeleton (baseline interaction varies between −2 Nm and 2 Nm). The non-statistically significant results regarding RMSE and delay between the reference joint angle and real joint angle (
Table 3 and
Table 4,
p-value < 0.05) are expectable once the exoskeleton is assisting the user through the trajectory tracking control. These results prove that the low-level controller properly acted for the real joint angle to follow the reference joint angle, compensating possible deviations due to human-robot interaction.
Relatively to joint motion biofeedback strategy, between PRTR and TR, the experimental group increased
Performance Dir for the training gait phase and gait cycle (
Table 3,
p-value: 0.07), and the
Performance Mag Thr for the training gait phase (
Table 3,
p-value: 0.09). As expected, the
Performance Dir is more affected by the joint motion biofeedback training than other metrics once this metric is directly related to the goal of this strategy that aims to encourage the users to self-control their compliance with the exoskeleton’s direction of movement. The improvements regarding
Performance Dir and
Performance Mag Thr suggest that the joint motion biofeedback training improved the participant–exoskeleton compliance, as mentioned by the participants, by enhancing the human-robot interaction. Between PRTR and PSTR, the experimental group increased
Performance Dir (
Table 3,
p-value: 0.07) and
Performance Mag Thr (
Table 3,
p-value: 0.07) for the training gait phase similarly between PRTR and PSTR. These findings suggest that motor learning related to these metrics occurred once the participants were able to maintain the increase in performance during post-training. All these results were not statistically significant; however, the related
p-values are particularly close to the level of significance of 0.05 in comparison with the equivalent results of the control group (
Table 3,
p-value: 0.27–0.39), suggesting that the promising results reported in the experimental group were potentially caused by the biofeedback. It is hypothesized that the
p-values will possibly reach the level of significance with longer training (more than 3 min), as commented by the participants (
Table 5 and
Table 6 in Q2), once the metrics did not achieve their highest values (100% for Performance, 2 Nm or below for RMS and maximum interaction torque, and −2 Nm or above for minimum interaction torque).
For the user participation biofeedback strategy, between PRTR and TR, the results of the experimental group suggest that the user participation biofeedback training significantly improved participant-exoskeleton compliance, as mentioned by the participants (
Table 5 and
Table 6 in Q1), by enhancing the human-robot interaction (
Performance Mag Thr for the training gait phase significantly increased and for the gait cycle increased (
Table 4,
p-value: 0.03–5.5 × 10
−2); minimum interaction torque (
Table 4,
p-value: 0.07); and
Performance Mag for the training gait phase (
Table 4,
p-value: 5.57 × 10
−2) increased). Improvements in human-robot interaction-related metrics were also verified between PRTR and PSTR (
Table 4,
p-value: 8.59 × 10
−3–0.08), suggesting that motor learning occurred by these metrics. Therefore, 3 min training was enough to achieve motor learning with significant improvements in human-robot interaction, demonstrating the efficiency of the user participation biofeedback. On the other hand, non-significant results or large
p-values were obtained for these metrics in the control group when compared to the experimental group (
Table 4,
p-value: 0.01–0.77). Overall, there is evidence that the promising results achieved in the experimental group were potentially caused by biofeedback.
As expected, the user participation biofeedback training affected more magnitude-related metrics, namely the
Performance Mag Thr,
Performance Mag, and extremes of the interaction torque than the joint motion biofeedback training. On the other hand, the joint motion biofeedback training affected more the
Performance Dir than the user participation biofeedback training. These findings show the complementarity of both strategies, highlighting the need for sequencing both. For a low cognitive effort and effective gait training, the joint motion biofeedback training firstly may be performed and then both biofeedback strategies may be provided simultaneously to ensure that the previous motor learning remains, avoiding a decrease in
Performance Dir between PRTR and PSTR in user participation strategy. Moreover, the participants may perform biofeedback training for the remaining gait phases (from the gait phase with the lowest performance to the gait phase with the highest performance) to achieve significant improvements regarding human-robot interaction considering all gait cycle (
Table 3 and
Table 4).
Contrarily to the findings of this study, the human-robot interaction torque feedback from [
10] was not able to detect the motor progress of the users. On the other hand, the findings from [
9,
11] suggest improved motor learning upon biofeedback training, similarly to this study. However, both studies [
9,
11] include non-wearable BSs while the proposed biofeedback is provided through a fully wearable BS allowing ambulatory use and daily practice, which accelerates motor learning [
4]. Moreover, the study [
11] only addressed dorsiflexion/plantar flexion movements while sitting. Contrarily to [
11], our findings show the promising impact of biofeedback for functional motor learning of gait, which is a motor task indispensable for a healthy daily living.
Furthermore, the participants demonstrated a positive appreciation concerning the auditory and vibrotactile cues and motivation to perform gait training with biofeedback, suggesting promising usability of the proposed biofeedback strategies. However, the lack of consensus concerning the timing needed to learn how to use the BS shows the need to perform a new pre-post controlled study with more participants and longer training. Regarding the usability questionnaire, most of the participants agreed with the need for physiotherapist support along with the gait training, highlighting the importance of the physiotherapist-oriented control strategies, not evaluated in [
10]. This importance was reinforced by the technical person who effectively followed the participants during the experimental protocol. Studies [
9,
11] assessed user’s satisfaction using different questionnaires (a Likert-scale questionnaire in [
11] and the Quebec User Evaluation of Satisfaction with Assistive Technology 2.0 in [
9]). Similar to this study, the participants from [
11] were shown to be satisfied with the experimental procedure involving biofeedback and, in [
9], the acceptability of the biofeedback was rated as very high. However, the proposed wearable biofeedback solution allows the users to move freely in a space without visual reliance (contrarily to [
9,
11]) and the need for a treadmill (in opposition to [
9]). Moreover, the proposed biofeedback does not require complex and time-consuming preparation for EMG feedback, as in [
9]. Overall, this study proposes a wearable BS with promising usability and applicability for any-place gait rehabilitation.
Limitations and Future Work
The main limitations of this work are the low number of participants and the short gait training. Furthermore, the study of the BS’s effects was limited to healthy participants and the gait phase with the lowest performance. Future work will address these limitations performing a pre-post controlled study with post-stroke patients (target end-users) and a longer gait training driven by trajectory tracking and impedance control. The quantitative effects of the physiotherapist-oriented control strategies on human-robot compliance need to be further investigated, comparing the human-robot interaction torque-based metrics between walking trials with biofeedback, the exoskeleton’s assistance, and a physiotherapist’s instructions (experimental group) versus walking trials with biofeedback and the exoskeleton’s assistance but without a physiotherapist’s instructions (control group). Moreover, further studies will include walking trials at higher walking speeds to verify the influence of walking speed on the efficacy of the biofeedback.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}