Nonuniformly-Rotating Ship Refocusing in SAR Imagery Based on the Bilinear Extended Fractional Fourier Transform


Abstract
1. Introduction
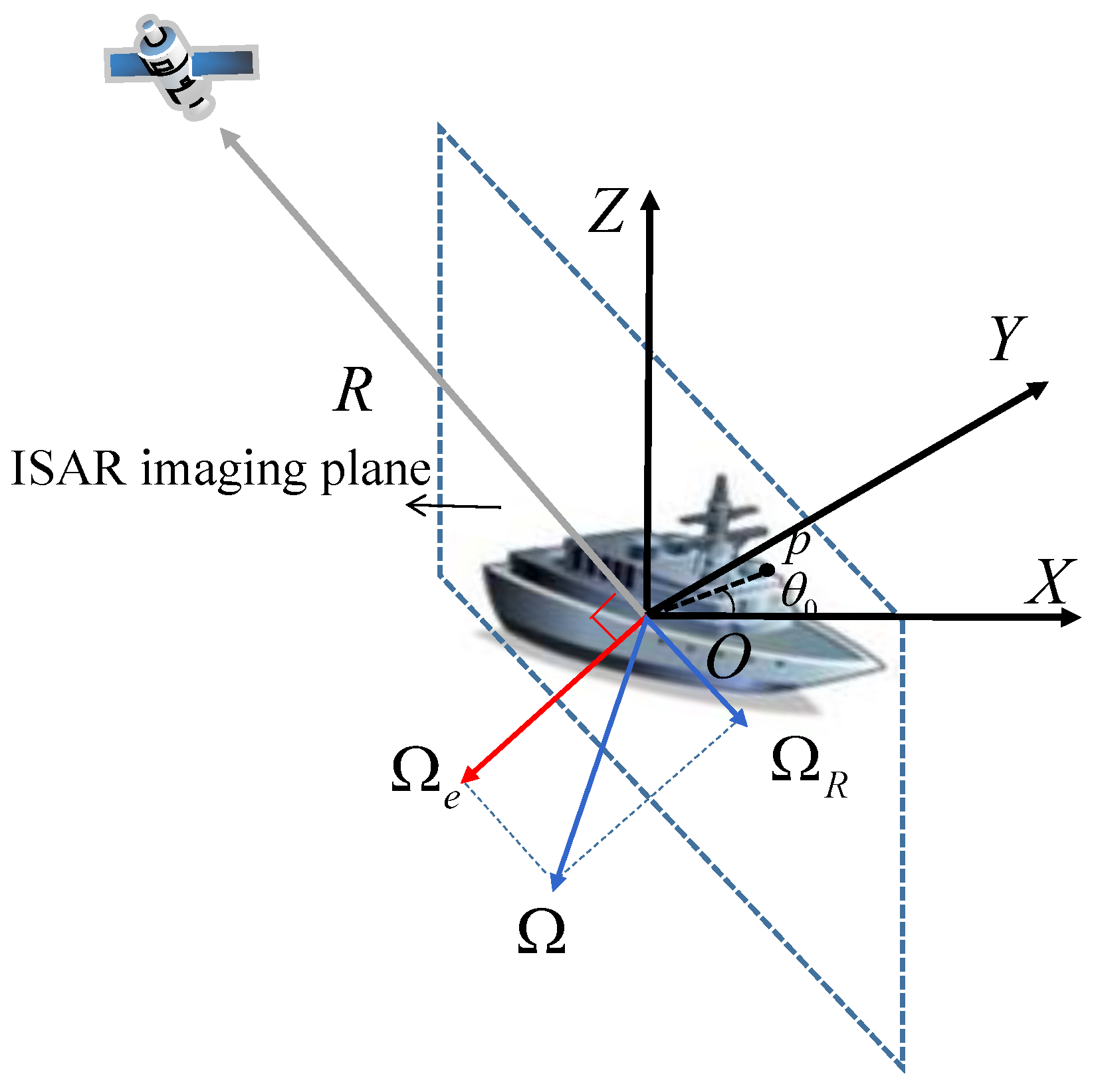
2. ISAR Imaging Model of the Nonuniformly Rotating Ship
3. Bilinear Extended Fractional Fourier Transform
3.1. Principle of BEFRFT
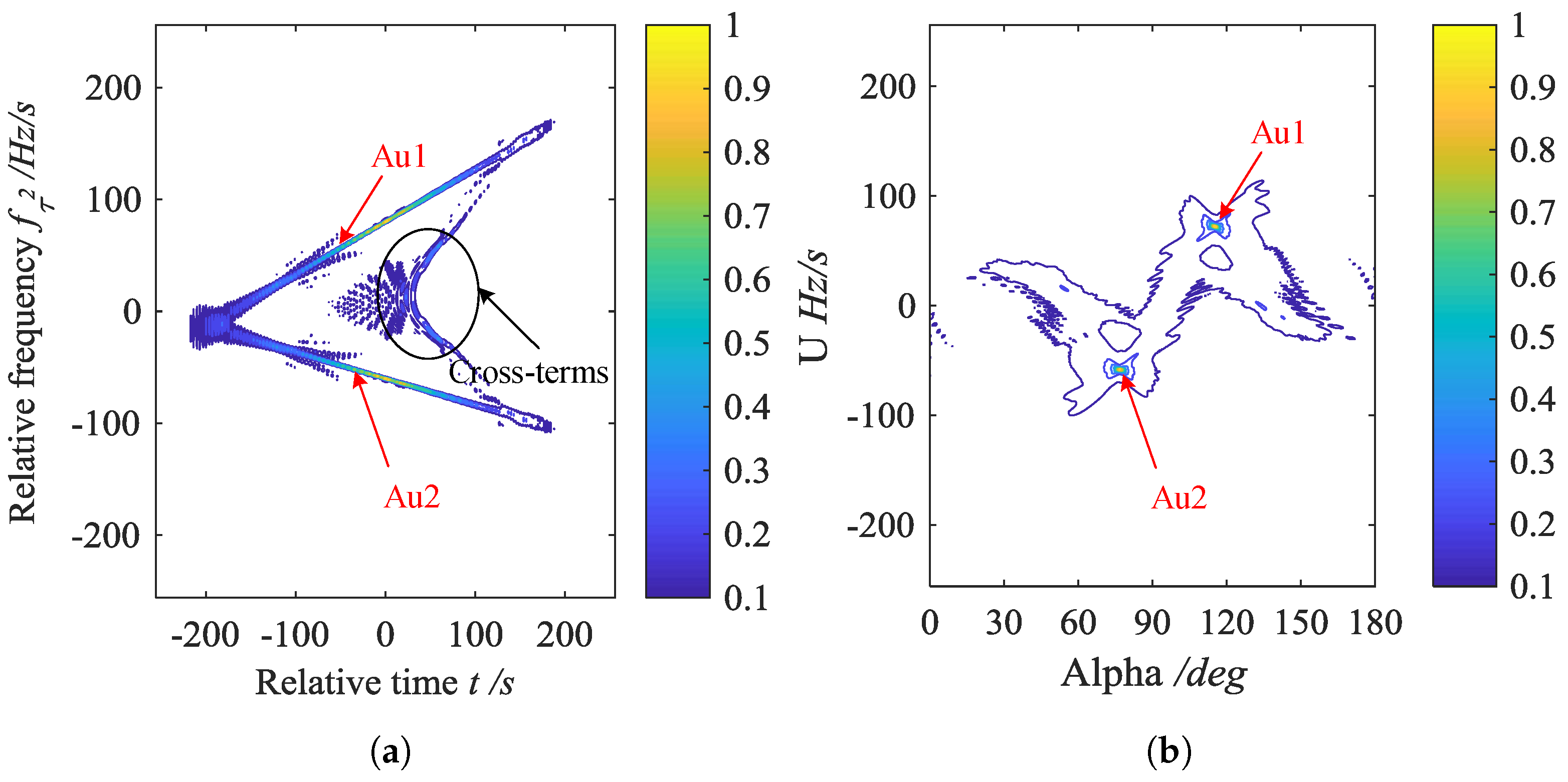
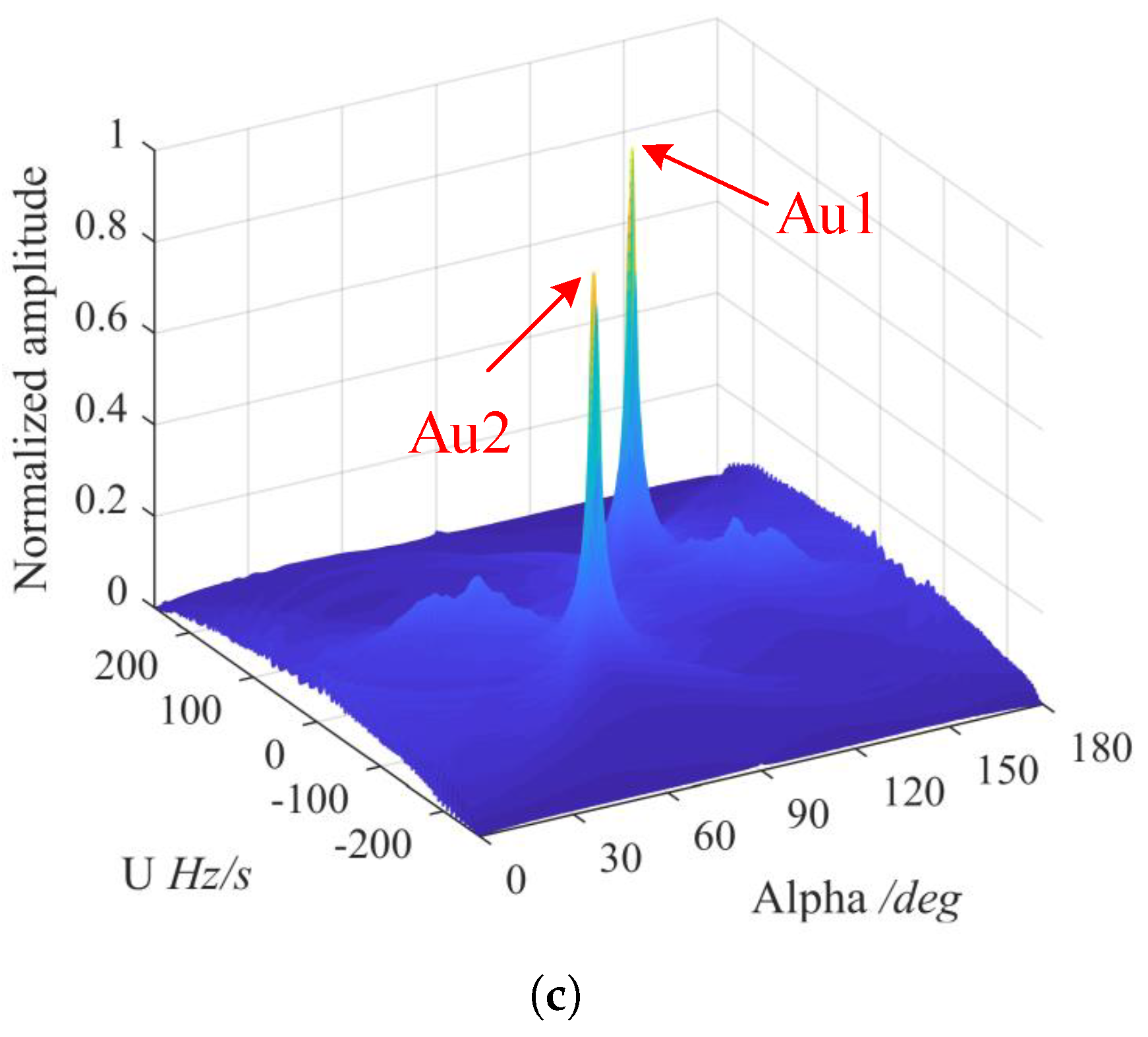
3.2. Cross-Term Characteristic
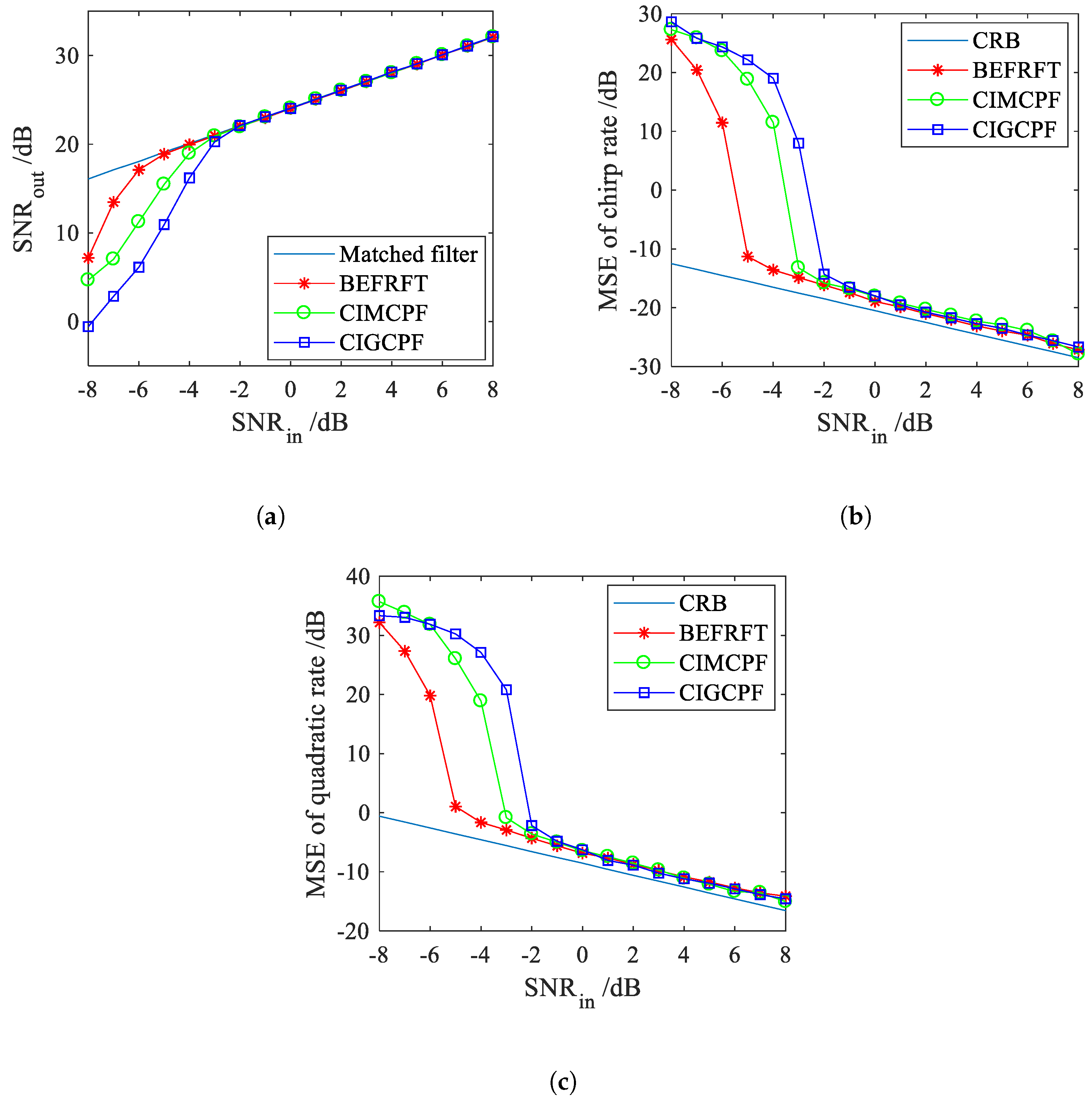
3.3. Antinoise Performance
4. Nonuniformly Rotating Ship Refocusing Based on BEFRFT
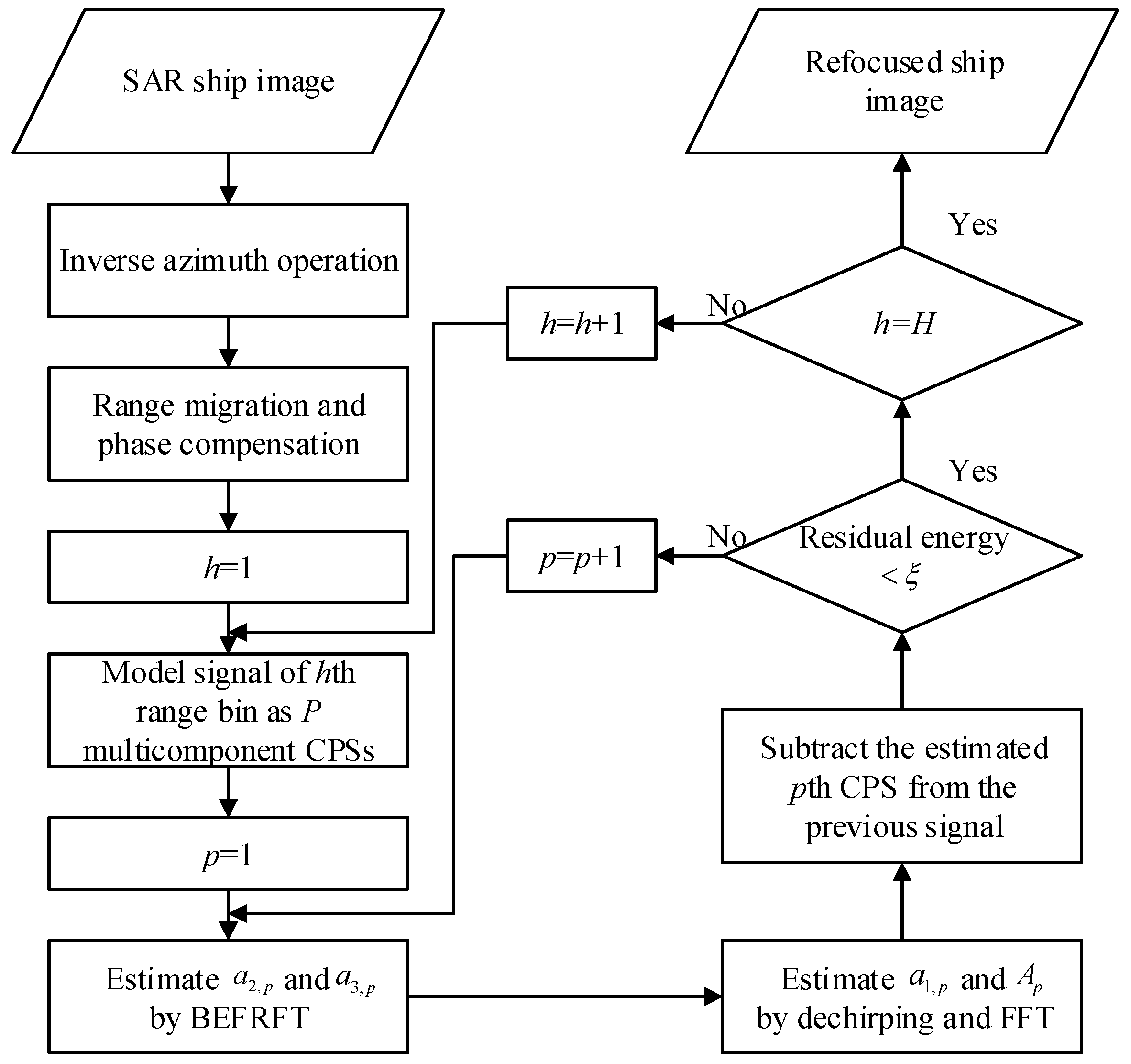
- Step 1
- Perform the inverse azimuth operation to the original ship image, as mentioned in Section 2. Apply the range migration and phase compensation to turn the received signals into the turntable form.
- Step 2
- Get the received signal of the hth range bin, where and H is the number of range bins.
- Step 3
- Apply BEFRFT to estimate the chirp rate and quadratic rate .
- Step 4
- Dechirp with and and utilize FFT to estimate the center frequency and amplitude .where D and denote the amplitude and the frequency of the peak after FFT, respectively.
- Step 5
- Step 6
- Step 7
- Repeat steps 2–6 until the received signals of H range bins are estimated. Combining RID algorithm, the refocused ship image can be obtained.
5. Expeimental Results of Nonuniformly Rotating Ship Refocusing
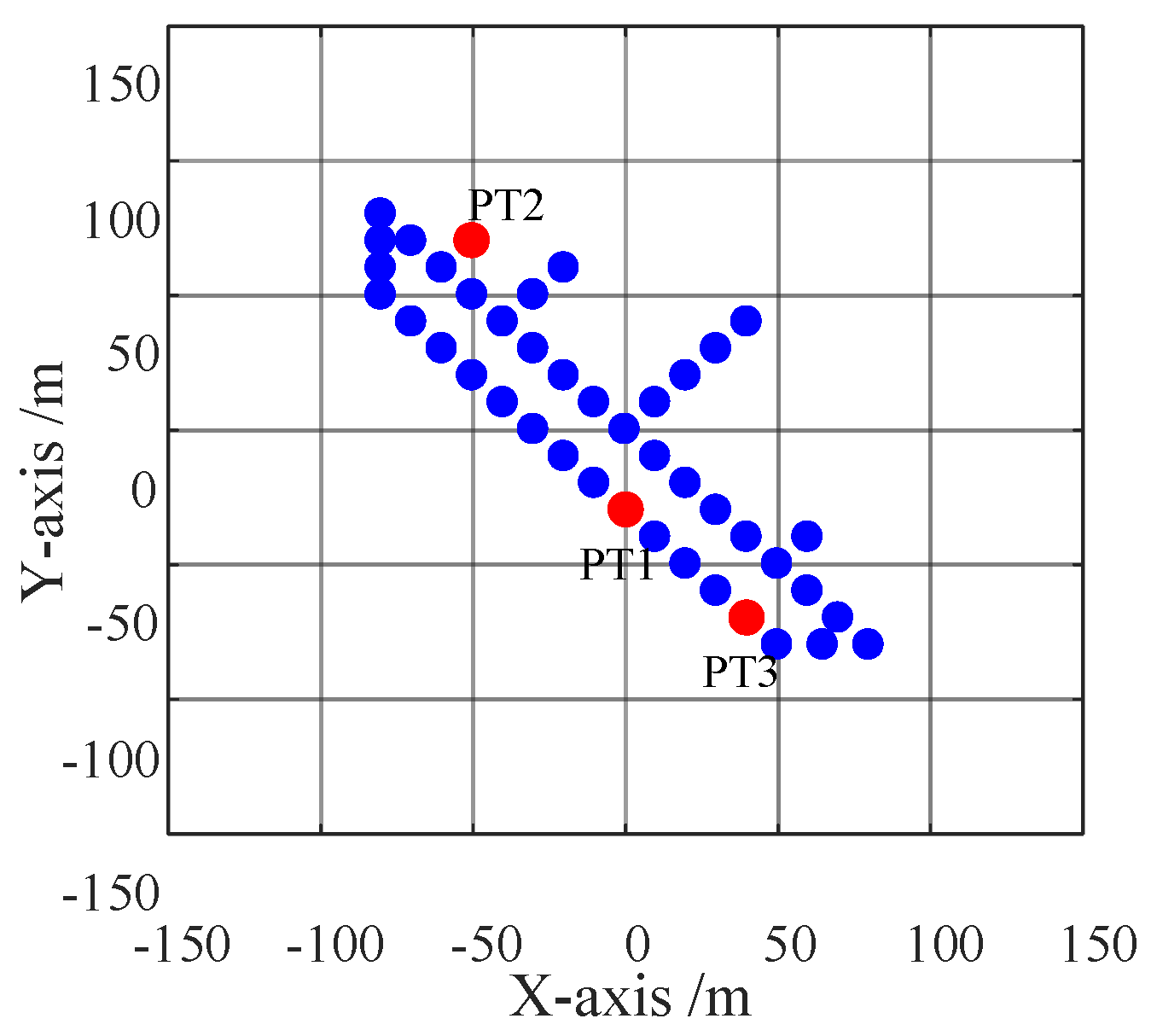
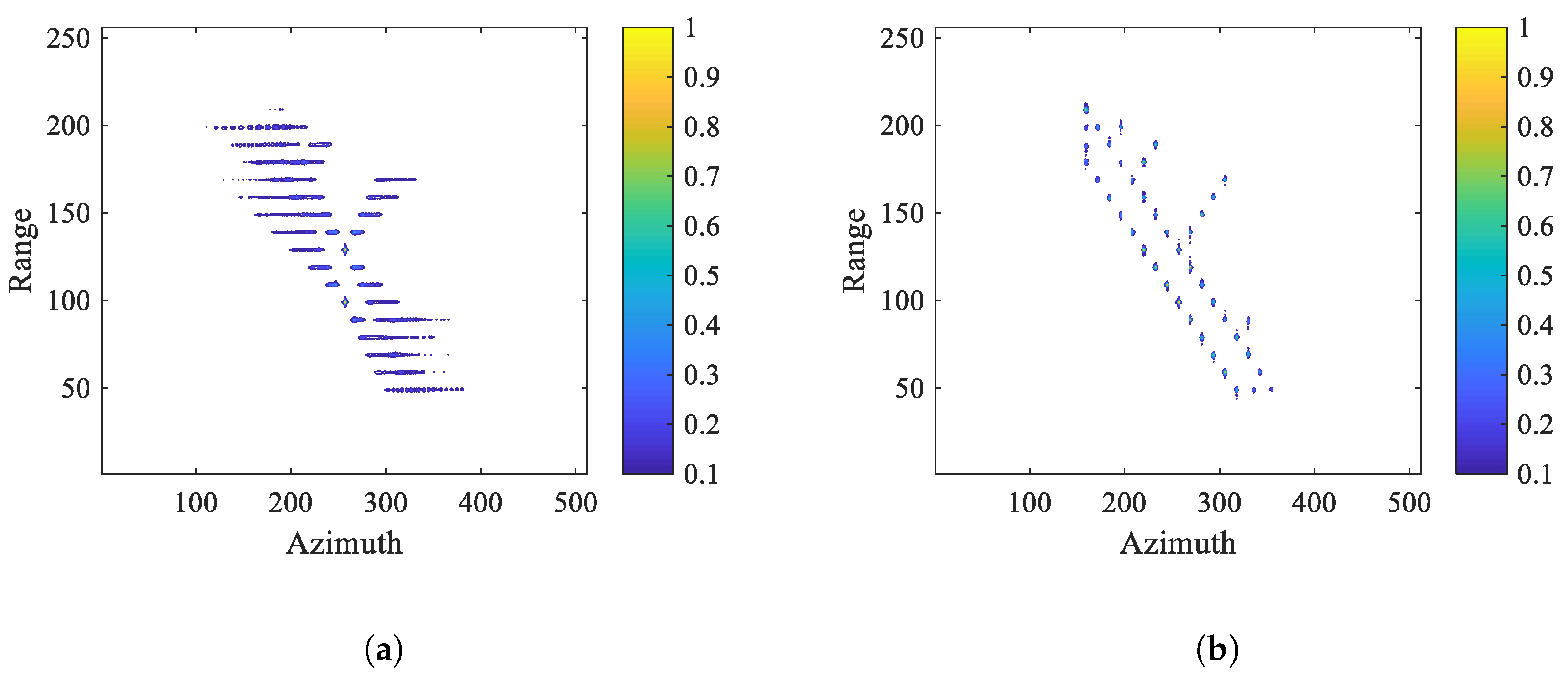
5.1. Nonuniformly Rotating Ship Refocusing With Simulated Data
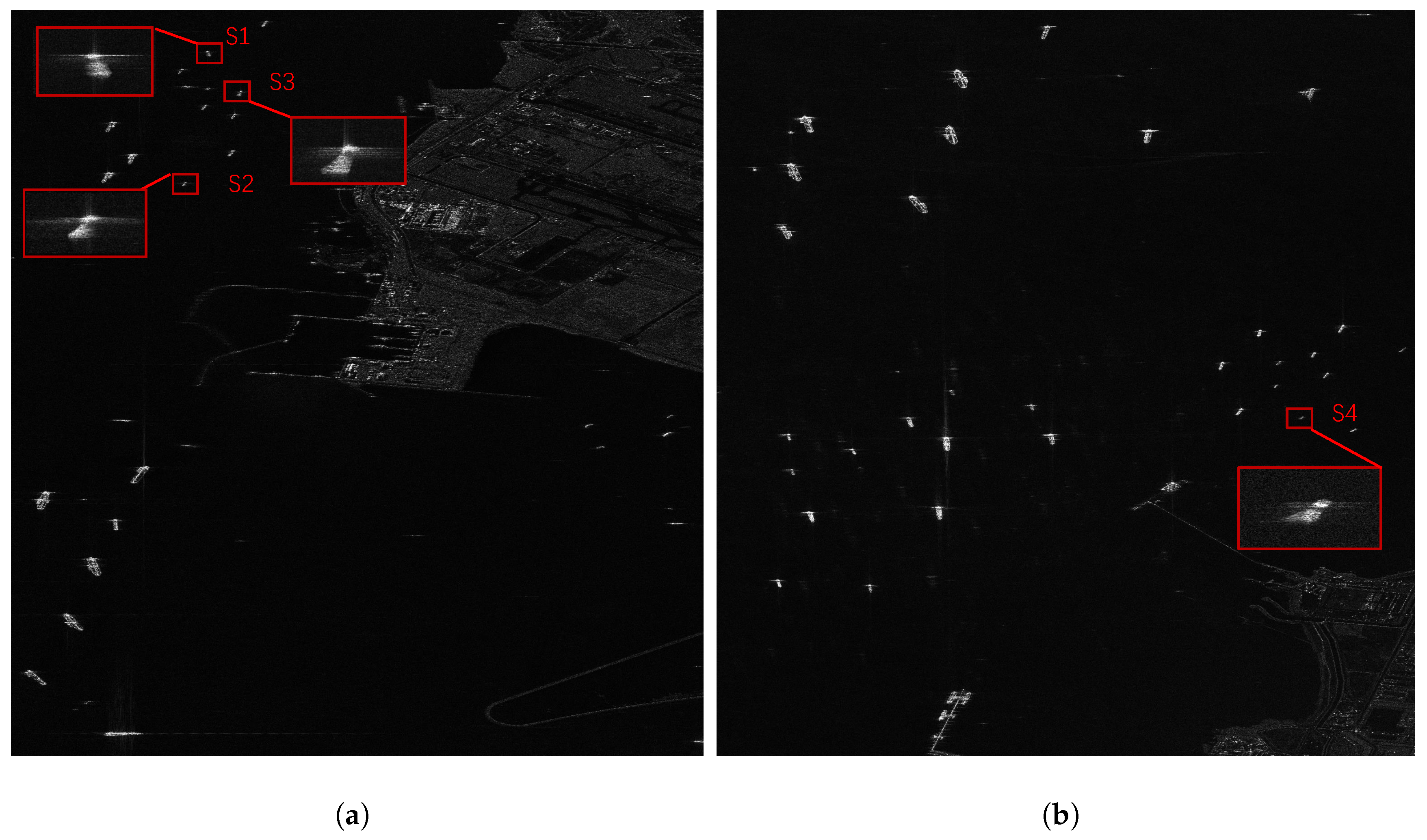
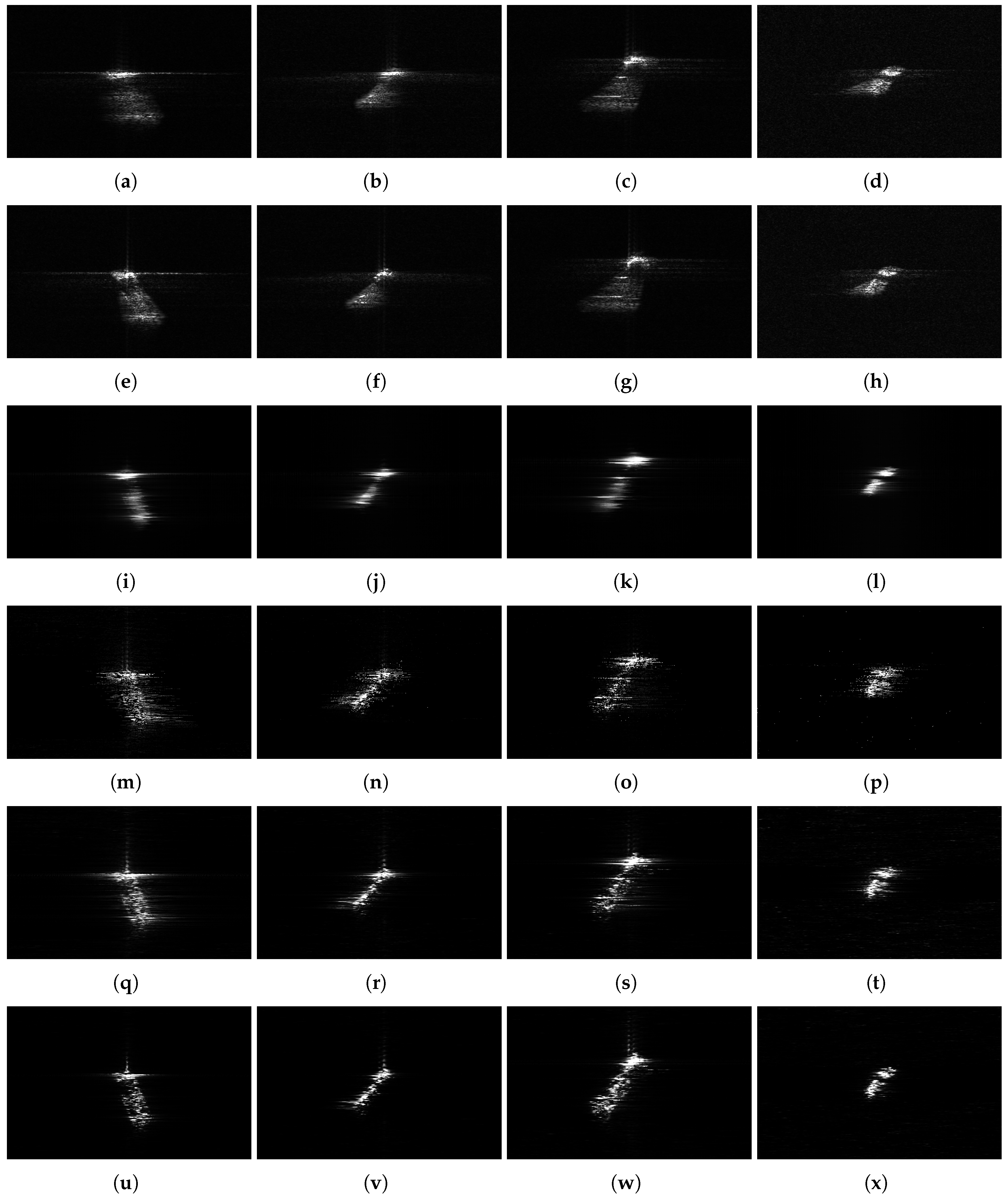
5.2. Nonuniformly Rotating Ship Refocusing with the Gaofen-3 Data
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jin, G.; Dong, Z.; He, F.; Yu, A. SAR Ground Moving Target Imaging Based on a New Range Model Using a Modified Keystone Transform. IEEE Trans. Geosci. Remote Sens. 2018, 57, 3283–3295. [Google Scholar] [CrossRef]
- Casalini, E.; Frioud, M.; Small, D.; Henke, D. Refocusing FMCW SAR Moving Target Data in the Wavenumber Domain. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3436–3449. [Google Scholar] [CrossRef]
- Li, Z.; Wu, J.; Liu, Z.; Huang, Y.; Yang, H.; Yang, J. An optimal 2-D spectrum matching method for SAR ground moving target imaging. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5961–5974. [Google Scholar] [CrossRef]
- Garren, D.A. SAR focus theory of complicated range migration signatures due to moving targets. IEEE Trans. Geosci. Remote Sens. Lett. 2018, 15, 557–561. [Google Scholar] [CrossRef]
- Pelich, R.; Longépé, N.; Mercier, G.; Hajduch, G.; Garello, R. Vessel refocusing and velocity estimation on SAR imagery using the fractional Fourier transform. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1670–1684. [Google Scholar] [CrossRef]
- Huang, P.; Xia, X.-G.; Gao, Y.; Liu, X.; Liao, G.; Jiang, X. Ground Moving Target Refocusing in SAR Imagery Based on RFRT-FrFT. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5476–5492. [Google Scholar] [CrossRef]
- Chen, V.C.; Qian, S. Joint time-frequency transform for radar range-Doppler imaging. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 486–499. [Google Scholar] [CrossRef]
- Barbarossa, S. Analysis of multicomponent LFM signals by a combined Wigner-Hough transform. IEEE Trans. Signal Process. 1995, 43, 1511–1515. [Google Scholar] [CrossRef]
- Wood, J.C.; Barry, D.T. Radon transformation of time-frequency distributions for analysis of multicomponent signals. IEEE Trans. Signal Process. 1994, 42, 3166–3177. [Google Scholar] [CrossRef]
- Wang, M.; Chan, A.K.; Chui, C.K. Linear frequency-modulated signal detection using Radon-ambiguity transform. IEEE Trans. Signal Process. 1998, 46, 571–586. [Google Scholar] [CrossRef]
- Lv, X.; Bi, G.; Wan, C.; Xing, M. Lv’s distribution: principle, implementation, properties, and performance. IEEE Trans. Signal Process. 2011, 59, 3576–3591. [Google Scholar] [CrossRef]
- Wang, P.; Li, H.; Djurovic, I.; Himed, B. Integrated cubic phase function for linear FM signal analysis. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 963–977. [Google Scholar] [CrossRef]
- Almeida, L.B. The fractional Fourier transform and time-frequency representations. IEEE Trans. Signal Process. 1994, 42, 3084–3091. [Google Scholar] [CrossRef]
- Zheng, J.; Su, T.; Zhang, L.; Zhu, W.; Liu, Q.H. ISAR imaging of targets with complex motion based on the chirp rate–quadratic chirp rate distribution. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 52, 7276–7289. [Google Scholar] [CrossRef]
- Bai, X.; Tao, R.; Wang, Z.; Wang, Y. ISAR imaging of a ship target based on parameter estimation of multicomponent quadratic frequency-modulated signals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 52, 1418–1429. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, Y. Inverse synthetic aperture radar imaging of maneuvering target based on the product generalized cubic phase function. IEEE Geosci. Remote Sens. Lett. 2011, 8, 958–962. [Google Scholar] [CrossRef]
- Wang, Y.; Kang, J.; Jiang, Y. ISAR imaging of maneuvering target based on the local polynomial Wigner distribution and integrated high-order ambiguity function for cubic phase signal model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2971–2991. [Google Scholar] [CrossRef]
- Qu, Z.; Qu, F.; Hou, C.; Jing, F. Quadratic Frequency Modulation Signals Parameter Estimation Based on Two-Dimensional Product Modified Parameterized Chirp Rate-Quadratic Chirp Rate Distribution. Sensors 2018, 18, 1624. [Google Scholar] [CrossRef]
- Li, D.; Gui, X.; Liu, H.; Su, J.; Xiong, H. An ISAR imaging algorithm for maneuvering targets with low SNR based on parameter estimation of multicomponent quadratic FM signals and nonuniform FFT. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5688–5702. [Google Scholar] [CrossRef]
- Li, D.; Zhan, M.; Zhang, X.; Fang, Z.; Liu, H. ISAR imaging of nonuniformly rotating target based on the multicomponent CPS model under low SNR environment. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 142–149. [Google Scholar] [CrossRef]
- Zhu, L. Quadratic Frequency Modulation Signals Parameter Estimation Based on Product High Order Ambiguity Function-Modified Integrated Cubic Phase Function. Information 2019, 10, 140. [Google Scholar] [CrossRef]
- Zuo, L.; Li, M.; Liu, Z.; Ma, L. A high-resolution time-frequency rate representation and the cross-term suppression. IEEE Trans. Geosci. Remote Sens. 2016, 64, 2463–2474. [Google Scholar] [CrossRef]
- Zhu, D.; Li, Y.; Zhu, Z. A keystone transform without interpolation for SAR ground moving-target imaging. IEEE Geosci. Remote Sens. Lett. 2007, 4, 18–22. [Google Scholar] [CrossRef]
- Liu, Q.; Nguyen, N. An accurate algorithm for nonuniform fast Fourier transforms (NUFFT’s). IEEE Microw. Guided Wave Lett. 1998, 8, 18–20. [Google Scholar] [CrossRef]
- Ristic, B.; Boashash, B. Comments on “The Cramer-Rao lower bounds for signals with constant amplitude and polynomial phase”. IEEE Trans. Signal Process. 1998, 46, 1708–1709. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| 99825Carrier frequency | 10 GHz |
| Bandwidth | 120 MHz |
| Sampling frequency | 150 MHz |
| Pulse repetition frequency | 420 Hz |
| Range of scene center | 5 km |
| Echo pulses | 1024 |
| Translational velocity | 40 m/s |
| Translational acceleration | 2 |
| Translational acceleration rate | 1 |
| Rotational velocity | 0.01 rad/s |
| Rotational acceleration | 0.01 |
| Rotational acceleration rate | 0.01 |
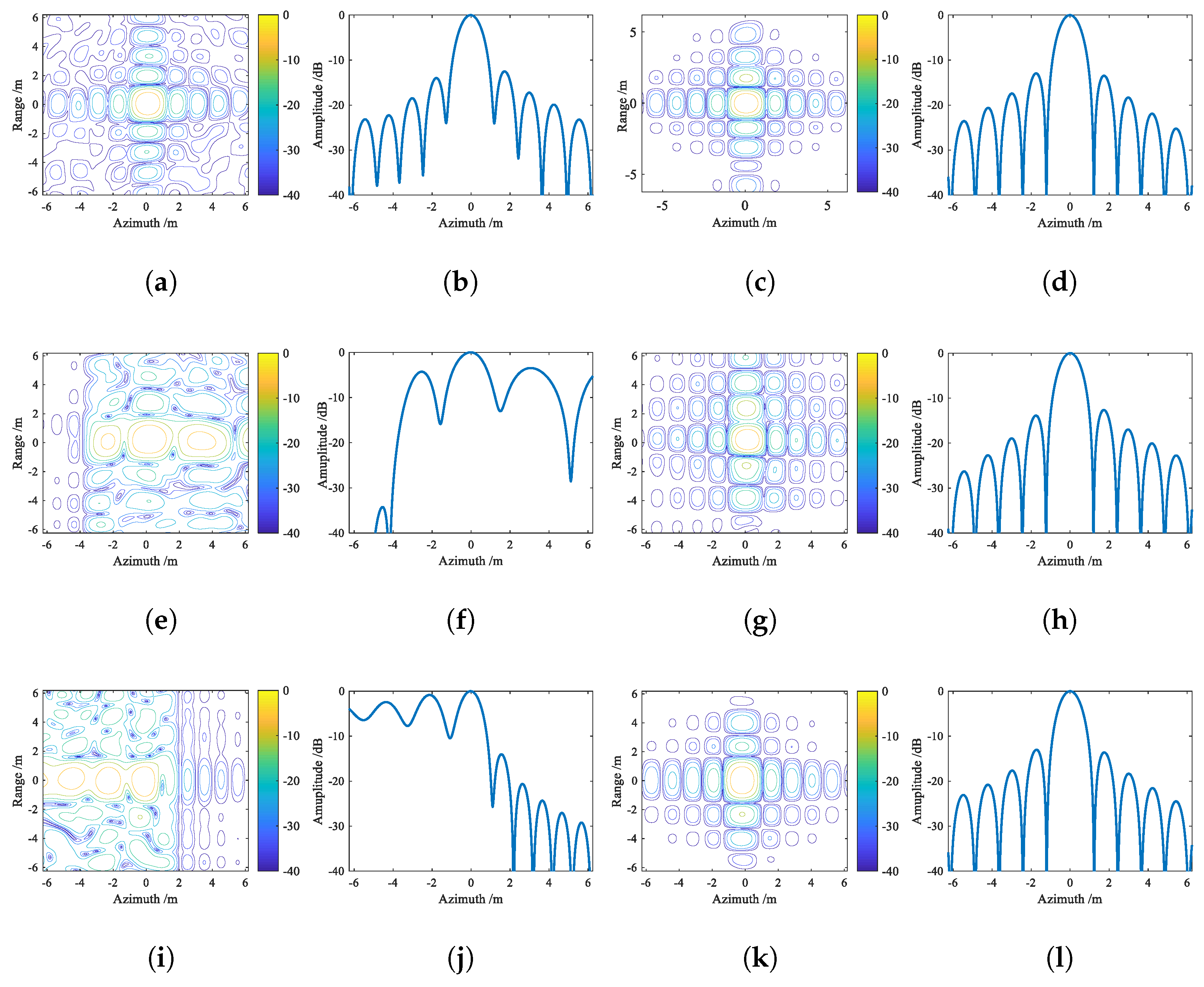
| Target | PSLR (dB) | ISLR (dB) | |
|---|---|---|---|
| ISAR algorithm | PT1 | −12.51 | −10.62 |
| PT2 | −3.48 | −0.42 | |
| PT3 | −0.84 | 2.98 | |
| BEFRFT | PT1 | −12.95 | −10.80 |
| PT2 | −12.64 | −10.79 | |
| PT3 | −13.82 | −10.82 |
| Original | ISAR Algorithm | RWT | CIGCPF | CIMCPF | BEFRFT | ||
|---|---|---|---|---|---|---|---|
| Entropy | S1 | 6.4257 | 5.2922 | 6.1753 | 5.2798 | 4.0857 | 3.5972 |
| S2 | 7.8618 | 7.3830 | 7.1361 | 6.7992 | 5.9165 | 5.5283 | |
| S3 | 8.1299 | 8.5094 | 7.3393 | 7.0753 | 6.5629 | 6.0525 | |
| S4 | 8.0640 | 8.0056 | 7.2224 | 6.7422 | 6.4991 | 6.1282 | |
| Contrast | S1 | 8.8720 | 9.9634 | 12.8649 | 13.5705 | 13.6443 | 15.4737 |
| S2 | 9.0490 | 10.0178 | 13.2321 | 14.6903 | 14.8947 | 16.3034 | |
| S3 | 9.8960 | 9.7195 | 12.4923 | 14.3366 | 14.2703 | 15.7992 | |
| S4 | 8.5627 | 9.1625 | 13.8116 | 16.6948 | 16.1005 | 18.3155 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, Z.; Fan, H.; Zhang, Z. Nonuniformly-Rotating Ship Refocusing in SAR Imagery Based on the Bilinear Extended Fractional Fourier Transform. Sensors 2020, 20, 550. https://doi.org/10.3390/s20020550
Pan Z, Fan H, Zhang Z. Nonuniformly-Rotating Ship Refocusing in SAR Imagery Based on the Bilinear Extended Fractional Fourier Transform. Sensors. 2020; 20(2):550. https://doi.org/10.3390/s20020550
Chicago/Turabian StylePan, Zhenru, Huaitao Fan, and Zhimin Zhang. 2020. "Nonuniformly-Rotating Ship Refocusing in SAR Imagery Based on the Bilinear Extended Fractional Fourier Transform" Sensors 20, no. 2: 550. https://doi.org/10.3390/s20020550
APA StylePan, Z., Fan, H., & Zhang, Z. (2020). Nonuniformly-Rotating Ship Refocusing in SAR Imagery Based on the Bilinear Extended Fractional Fourier Transform. Sensors, 20(2), 550. https://doi.org/10.3390/s20020550