1. Introduction
The cooperative operation among manned and unmanned platforms is becoming increasingly demanding with the development of navigation, communication, and intelligent control technologies, etc. Most robotic platforms or even human are equipped with navigation devices such as Global Navigation Satellite System (GNSS) and inertial measurement unit (IMU) [
1]. However, positioning tasks become difficult in the face of IMU error accumulation, signal occlusion, and environmental interference (smoke, buildings, forests, canyons, etc.). The concept of joint localization begins to gain in popularity [
2,
3]. Unlike positioning platforms with a single node, cooperative localization fully exploits positioning information exchanged in a multi-node ad hoc network. Not only can it lead to more accurate estimates for the position of the target node, but also expand the coverage and enhance the overall stability of the network [
4].
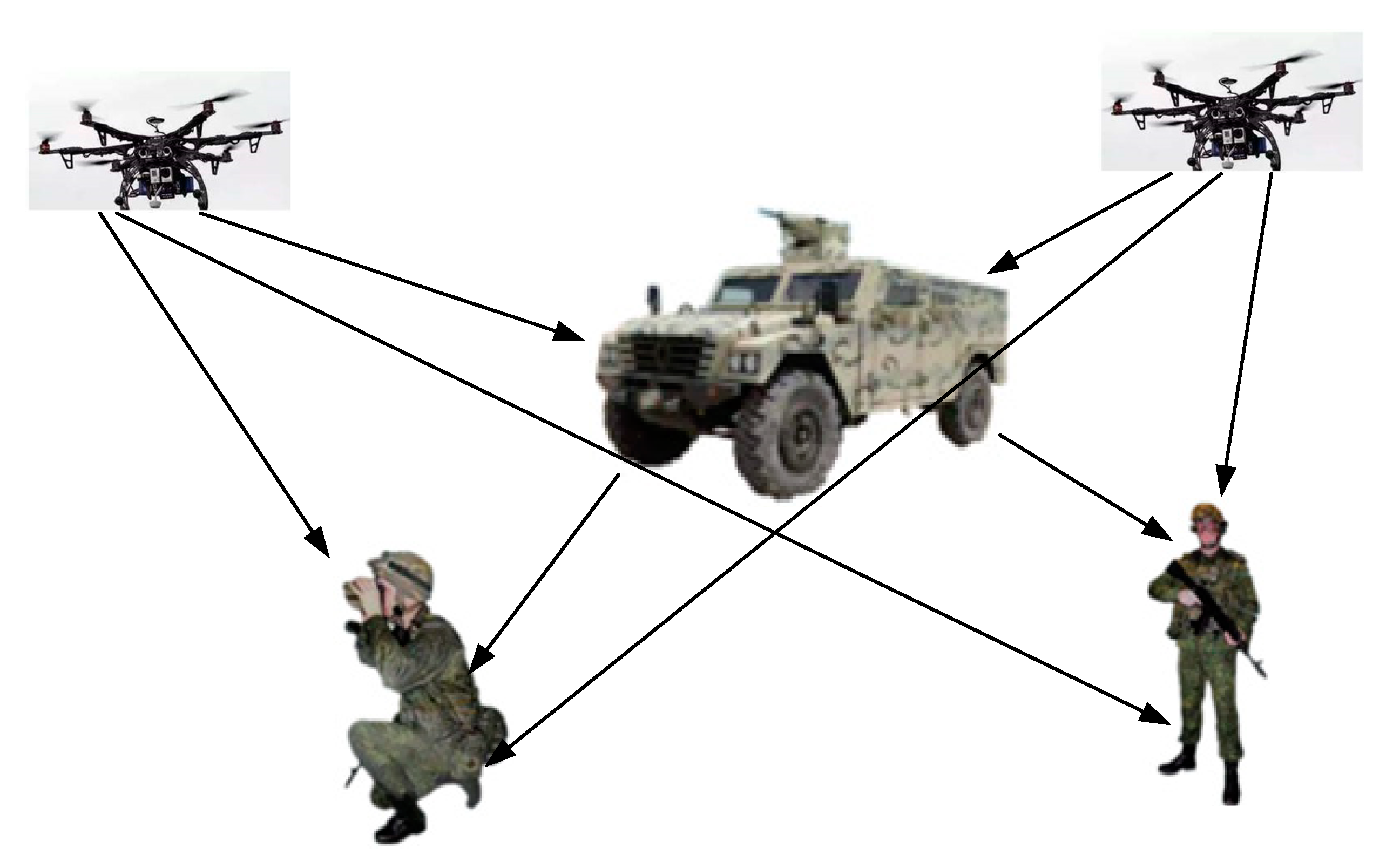
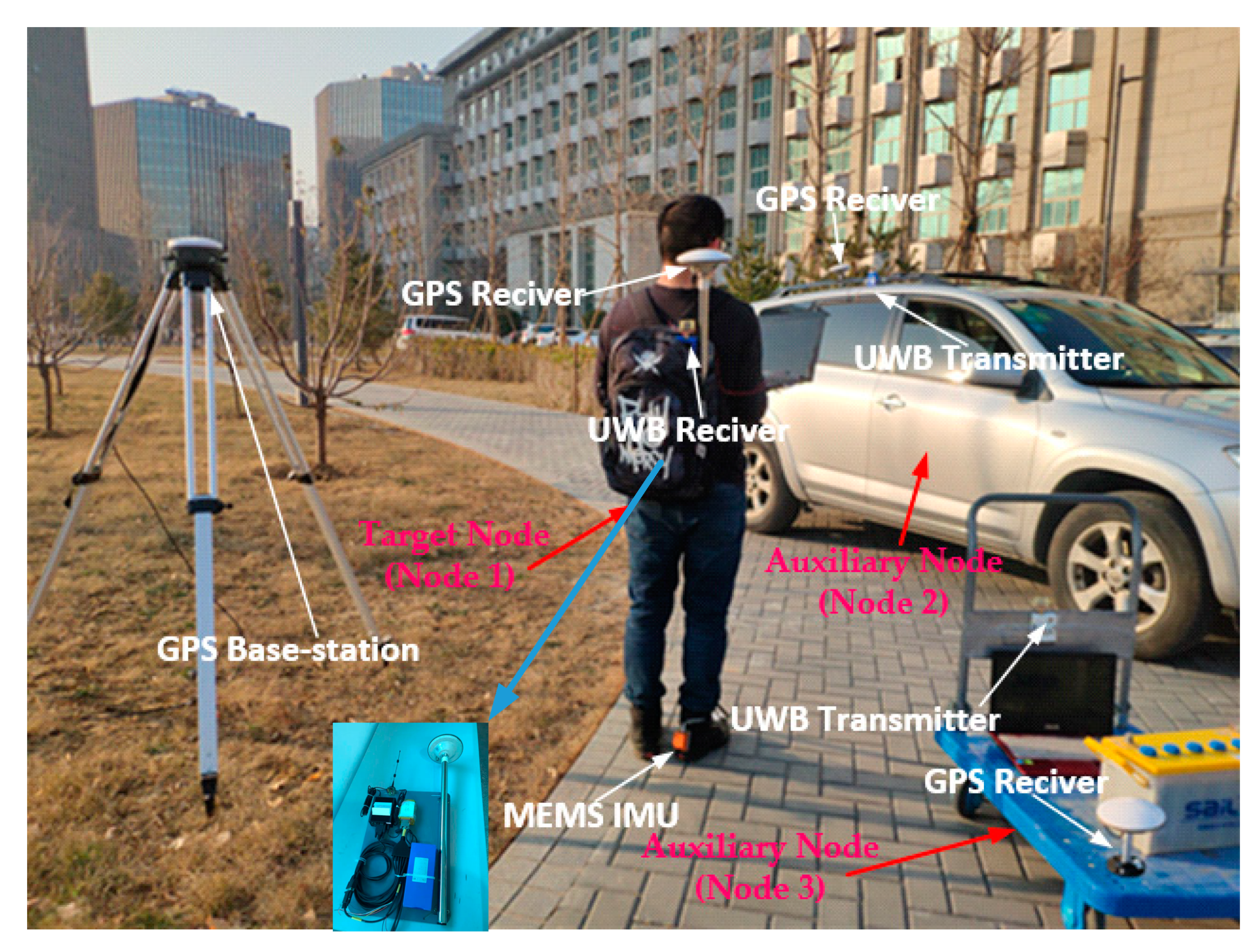
Figure 1 illustrates an application scenario in which soldiers and unmanned vehicles are accurately localized under a collaborative network.
Current mainstream schemes of collaborative localization fall into two categories in generally, one of which employs Bluetooth [
5], Wi-Fi [
6], ZigBee [
7], ultrasonic [
8], infrared [
9], UWB [
10] based on angle of arrival (AOA), time of arrival (TOA), and time difference (TDOA) methods under such models of geometry as trilateration, triangulation, and hyperbolas, which entails at least 3 auxiliary nodes together with range information. Unfortunately, this requirement cannot be met in many cases, and one shortcoming of these schemes is that the localization of the target node is completed only according to the information of the auxiliary node, while the information about the target node is ignored. Reference [
11] can attain centimeter-level positioning accuracy using multiple UWB transceivers to co-locate but with a considerable number of nodes involved, thus incurring high costs. Reference [
12] uses geometric features of translation and rotation to estimate the positioning error in inertial navigation of aircraft. Usually, these commonly employed nodes location methods entail additional auxiliary nodes, causing waste of resources and introducing extra costs, computational load, and communication load of the entire network.
Another type of formulation, rather than relying merely on auxiliary nodes based on geometry, is based on fusion of inertial readings from an IMU deployed on the target node and ranging information from auxiliary nodes. IMU is a self-contained system that measures linear and angular motion usually with gyroscopes and accelerometers independent of external assistance, it is immune to deception and signal jamming [
13]. Therefore, IMU is capable of performing autonomous localization, but integration of inertial measurements is bound to drift. Typical combinations include Wi-Fi/IMUs, cameras/IMUs, UWB/IMUs, etc. In this paper, we focus on IMU/UWB collaborative localization in view of the properties of the UWB signal including low power consumption, immunity to channel fading (such as multipath, non-line-of-sight (NLOS), etc.), powerful signal penetration, and high precision.
Numerous studies of research have been done on UWB/IMU collaborative localization. Most UWB cooperative localization systems assume prior knowledge on the positions of no less than two auxiliary nodes. Reference [
14] proposed a Simultaneous Localization and Mapping (SLAM) solution to localize pedestrians through three UWB auxiliary nodes in the case of unknown prior information with the precision to 0.1 m but it needed three nodes to be arranged in advance. Reference [
15] proposed a framework of indoor autonomous robot localization using a Sage-Husa fuzzy self-adaptive filter to fuse Inertial Navigation System (INS) and UWB signals. With two UWB nodes deployed, it can perform well with high accuracy and robustness. Reference [
16] combines UWB ranging measurements with inertial observations to localize based on Extended Kalman Filter (EKF) with only one auxiliary node but on the assumption of previous knowledge of the position and azimuth of the target node. Fallon et al. proposed a cooperative Autonomous Underwater Vehicle (AUV) navigation method using a single maneuvering surface craft, but it has a direct access to azimuth estimation [
17].
A Gaussian white noise is often the presupposition in approaching the nonlinearity of the problem of fusion of IMU and UWB observations. It is well known that most common solutions to nonlinear filtering problems are based on EKF and Unscented Kalman Filter (UKF). However, EKF often suffers large errors and deviations in its estimates of states and variances of non-linear stochastic systems [
18], while UKF may miscalculate if the posterior probability density of the system states is non-Gaussian [
19]. Compared with EKF and UKF, the main advantage of PF is that they do not place any restrictions on the form of the propagation and measurement models. Owing to the arbitrariness of particle distribution, PF is more suitable for arbitrary non-linear and non-Gaussian stochastic systems, although the computational complexity of PF is relatively large. With the enhancement of computer performance and the development of parallel computing technology, the problem of PF can be overcome [
20].
The standard particle filter algorithm uses the resampling method to prevent particle starvation. The specific method is to eliminate particles with smaller weight and copy particles with larger weight. The advantage of this method is simple operation, but after many iterations it will cause lack of particle diversity. If we use ant colony optimization to make particles with smaller weight move to the optimal position, and keep the position of particles with larger weight unchanged, the particles will have better distribution and keep the diversity of particles [
21].
In this paper, a cooperative localization method with only one auxiliary node is proposed based on the Adaptive Ant Colony Optimization Particle Filter (AACOPF) [
22] and dead reckoning (DR) [
23]. Even if the INS suffers power-down and hot reboot, there is no need for initial positioning information to realign itself. Only one auxiliary node is enough to help estimate the real-time position and azimuth of the target node. In the cooperative localization based on ranging information, communication between target nodes and auxiliary nodes as well as that between target nodes themselves is delivered so that the distances between target nodes and auxiliary nodes can be combined with the positions of auxiliary nodes themselves to localize more effectively. The cooperative localization method can establish single-to-multi, multi-to-single, and multi-to-multi network topologies making full use of the nodes in the network, which means, one auxiliary node can locate multiple target nodes whereas one or multiple target nodes may also be located by multiple auxiliary nodes.
Compared with existing approaches, this work has the following innovative aspects:
This paper proposes a formulation in which collaborative localization is realized with recourse to only one auxiliary node in motion along with its feasibility proof. Allowing for the multipath effects of UWB and NLOS coupled with occlusion by buildings and pedestrians, an AACOPF algorithm is designed which recognizes and eliminates auxiliary nodes with larger errors in ranging. The algorithm can be applied to Gaussian or non-Gaussian nonlinear models, implying a higher degree of positioning accuracy and robustness.
When the topology network containing more than one auxiliary node, the particle filter is able to perform collaborative localization by virtue of adaptive weight adjustment, no extra treatment is needed with the addition of other sensors, thereby permitting a plug and play mechanism, as opposed to traditional schemes bases on the EKF and UKF which, in this situation, necessitate re-linearization or even remodelling.
The system has been verified not only by simulation but through real data garnered in real situation and effects including errors in the monitoring of human gait and measurement errors have been taken into account, all of which demonstrate the feasibility and generality of the system.
To qualitatively and quantitatively analyse the observability of our cooperative localization system, different from the method in Fallon’s paper, we applied a Piece-Wise Constant System (PWCS) method to analyze the observability of the cooperative navigation system, which can not only qualitatively shows the observability based on the rank of Observability Matrix (OM), but also quantitatively presents the degree of observability based on its eigenvalues.
2. Problem Statement
2.1. Adaptive Cooperative Localization Problem
For the problem studied in this paper, we define node that does not have accurate coordinates or azimuth due to various reasons such as GPS failure, system malfunction, hot restart, etc. and need to be relocated as target node, and nodes that have access to localization information accuracy as auxiliary nodes.
To ensure the observability and convergence of the system, quantitative and qualitative analysis of the observability of our cooperative localization system is necessary. For the dynamical multiple auxiliary nodes topology network, we need to consider the measurement disruption caused by multipath or NLOS effects, particle depletion and dynamical multiple auxiliary nodes data fusion. In the complex collaborative network shown in
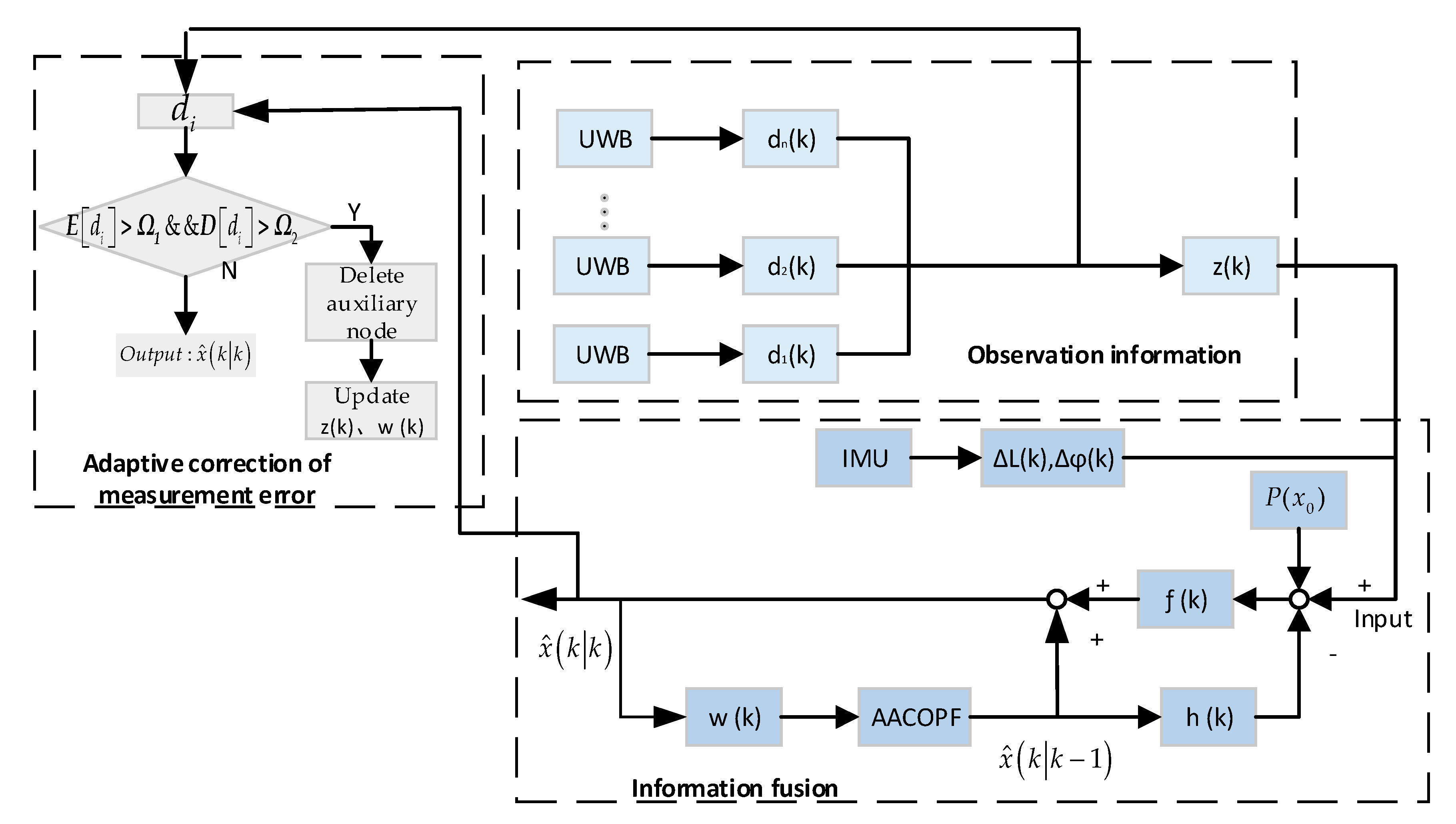
Figure 1, if a node cannot be self-positioned due to low GPS accuracy or IMU power-down restart, the algorithm of
Figure 2 is triggered to detect surrounding auxiliary nodes with UWB information, and combines IMU incremental information from the target node to decide on a co-location algorithm and then achieve coordinated positioning by AACOPF.
There are four presumptions based on which the proposed cooperative navigation algorithm can work properly: (1) Auxiliary node has higher localization accuracy. (2) The target node does not need the initial coordinates or the azimuth, but it is required to have dead reckoning ability. (3) Each node in the network of cooperative localization is capable of ranging with the auxiliary node. (4) Wireless communication is available between nodes to ensure the transmitting of ranging and localization information.
The kinematic model of the cooperative localization system
Let denote the 3D navigation state, comprising the position , azimuth of the robot can be estimated by DR model.
The observation equation of the cooperative localization system
where
represents all the measurements from IMU and UWB up to the current time
t,
i represents the
i-th sensor. In our positioning localization model, the distance
is between the target node and the auxiliary node.
2.2. Kinematic Model
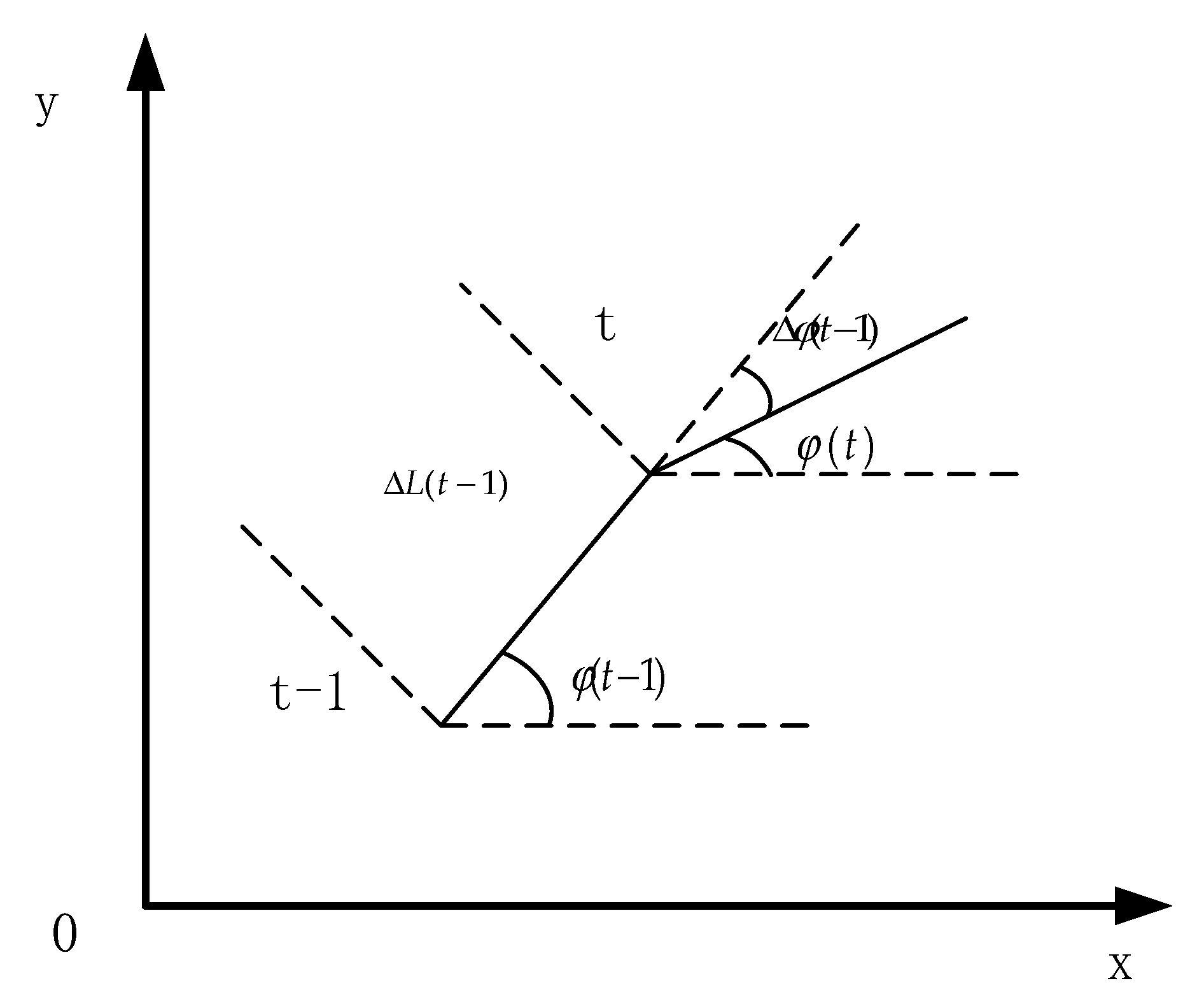
In this paper, we assume that the target node has basic relative dead reckoning capability. The navigation device needs to provide real-time information
and displacement increment
. As shown in
Figure 3, this information is used to estimate the current coordinates of the carrier by DR model [
24]. At time (
t − 1), the current position is
. If the next step is to move a distance of
with an azimuth angle of
to the position of time (
t), the coordinates of time (
t) can be calculated by Equation (3) [
25].
The cooperative localization algorithm proposed is insensitive to platforms, no matter they are manned or unmanned. We consider two major types of DR models in this paper. One is based on land vehicle’s odometer and IMU, and the other is based on the shoe-mounted IMU for pedestrian localization.
(1) DR model based on vehicle’s odometer and the IMU
The azimuth angle and displacement incremental information required for co-location is obtained by the Strapdown Inertial Navigation Solution (SINS). Due to the maturity of the development of the SINS based on odometer and IMU, this article does focus much on it. We recommend readers refer to [
26].
(2) The DR model for pedestrian localization
From our previous work [
27], pedestrian localization is based on the kinematics of the pedestrian, extracting the gait information during pedestrians’ movement, detecting the zero-velocity interval, and triggering the error correction algorithm based on the EKF to achieve the effect of restraining the navigation positioning error. In this paper, velocity information is selected as the observation to establish the current state of the pedestrian, and the EKF is used to suppress the velocity error in the detected zero speed range. Since the observation can only be obtained in the standing period, the EKF only updates the time and measurement information in standing duration (zero speed intervals), and only updates the time in the non-standing period. The state variables of EKF is as follows:
where
are attitude angle errors,
are position errors,
are speed errors. The linearized system state transition matrix is
Taking the actual speed value during standing periods in a pedestrian gait cycle as an observation measurement , the corresponding observation matrix is , the variance matrix of system process noise and observation noise are defined as , , respectively.
When the state error estimate of the filter output is brought into the strapdown inertial navigation system for error compensation, then at time
k, the error-corrected position increment information can be expressed as
Attitude error compensation is accomplished by updating the attitude transformation matrix as follows:
The information of the azimuth angle increment after error correction is expressed as follows:
2.3. Measurement Model Based on UWB
Since the observation model is based on UWB ranging measurements, we analyze the sources of UWB observation errors in order to improve positioning precision. In general, the sources of ranging error are multipath fading
and NLOS propagation
[
28]. References [
29,
30] claimed that the propagation error
is not relevant to
d, but rather the penetration coefficient describing how the LOS path is impeded. The distance ranging error
can be expressed explicitly as a function of the Transport-Receive (TX-RX) separation distance and system bandwidth as follows:
At time (
t), assuming that the position of an auxiliary node in navigation coordinates is
, where
denotes the auxiliary serial number, and
n is the total number of auxiliary node. Then the measurement distance from the
j-th auxiliary node with UWB tag to the target node with UWB is written as:
where the distance
between true target node and
j-th auxiliary node can be measured by ranging sensor,
is the position of the
i-th particle, and the distance
between the particle
and the auxiliary node
can also be obtained. The particle weight updating equation is established by taking the deviation between
and
.
2.4. Algorithm Overview
The cooperative localization method based on AACOPF and dead reckoning is proposed that performs without prior knowledge of the initial location and azimuth of the target node and with only one auxiliary node capable of localization and one ranging sensor measuring the Euclidean distance between a target node and an auxiliary node. The AACOPF algorithm is designed to solve the effects of UWB-related peak offset error and non-Gaussian error caused by UWB multipath and NLOS factor on cooperative localization error in the multiple auxiliary nodes topology network structure. It can realize multi-to-single collaborative localization by adjusting the weight update adaptively. It has the function of plug and play, because the new auxiliary node is only an additional source added to the weight update. Thus, if the auxiliary node cannot be used due to signal loss or sensor failure, the system only needs to avoid adding relevant factors, without special procedures to re-model and re-linearize the system model.
3. Cooperative Localization Algorithm with an Adaptive Ant Colony Optimization Particle Filter
PF is another non-parametric implementation of Bayesian filtering, whose notion is to represent posterior by a series of random state samples obtained from posteriors. In PF principle, let
be a sample of posteriors distribution (particles), defined as
, and each particle
is a possible hypothesis of the state at time
t. The intuitive sense of PF is to approximate confidence
with a series of particles
. Ideally, the probability that state
is included in particles set
is proportional to its posterior
of Bayesian filter:
, where
is the control and
is the observation [
31].
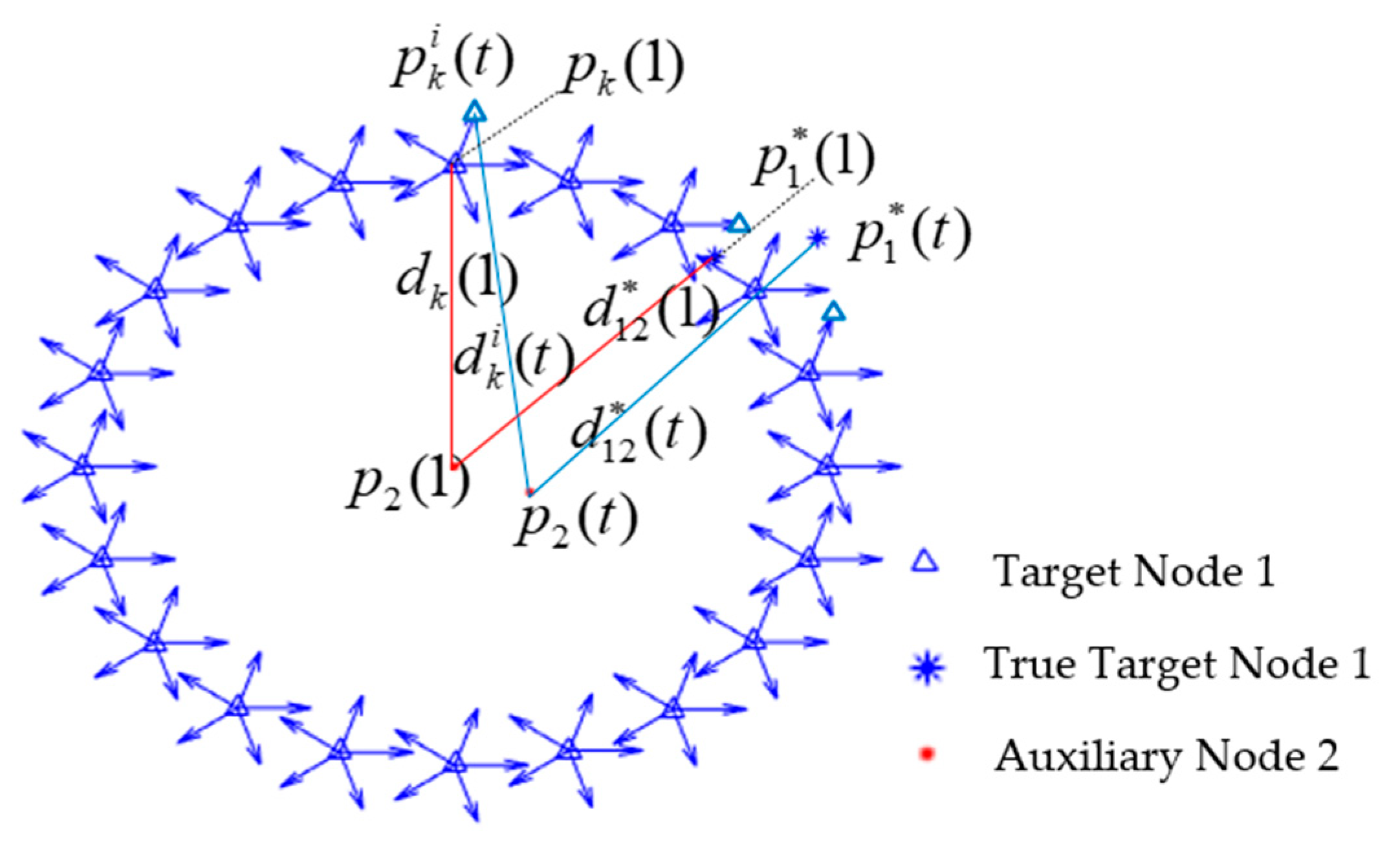
As shown in
Figure 4, at time (1),
represents the position of auxiliary node 2 with normal localization function,
represents the true position of target node 1.
denotes the measured distance between true target node 1 and auxiliary node 2 obtained by ranging sensor. More precisely, with
as the center of the circle and
as the radius. The
particles
of the target node 1 are generated at the time (1) and each particle represents the possible location and initial azimuth of the target node 1. After time (1),
particles are propagated by DR model.
Let be the measured true distance between true target node 1 and auxiliary node 2 at (t) time. The predicted distance between and auxiliary node 2 is denoted as . denotes the difference between the predicted distance and the measured distance of each particle, which is used in the calculation of particle weight. The particle with predicted distance that best matches the measured distance gets the highest weight. Through PF, the particles swarm will gradually converge to the true state. The position of the target node 1 is replaced by the position of cooperative localization to realize the trajectory tracking of the target node 1, and the initial azimuth of the target node 1 is derived from the optimal trajectory.
In this paper, ant colony optimization is used to improve the traditional particle filter algorithm. The steps are as follows.
Step 1: Particles initialization
Through the known prior probability density distribution of the random dynamic system, the initial particles at (t = 0) are obtained by samples and the corresponding initial weight of each particle is .
Step 2: Importance sampling
According to , , the particle set at time (t) is obtained by the Equation (3).
Step 3: Adaptive cooperative localization
The error in ranging observations are modelled as a Gaussian distribution. In view of the multipath and ULOS effects of UWB and occlusion by pedestrians and buildings along with their consequent impacts on UWB peak values. Adaptive ranging recognition is involved to detect and eliminate auxiliary nodes with unacceptable errors. Updating the weights in the Step 4 leads to higher accuracy and robustness.
Let denote the residual between the measured distance and the one calculated with estimated position. If the mean value of ranging error is greater than the threshold value and the variance is greater than threshold , that is , the node will be eliminated followed by weight updating.
Step 4: Update weights
The predicted value of each particle is obtained by Equation (12), and the weight of each particle
is calculated by the following equation according to the current observation
:
In order to get better tracking effect with the ant colony algorithm, it is necessary to eliminate the particles whose estimated values contradict the real value. That is, when , the weight is given ; otherwise, the weight remains unchanged.
Normalized particle weights
Step 5: Ant colony optimization resampling [
32]
The transition probability set of
from the
i-th particle to the
j-th particle at time (
t) is obtained by the Equation (14). In particle selection, a threshold value
is set, when the maximum transfer probability
is less than
, the particle does not change its position. When it is greater than
, let
, the particle set
is updated to maintain particle diversity, and the corresponding weight set of each particle is
. The value of
can be obtained by experiments or experience.
Define the particle transition probability to represent the probability that particle i will shift to j at the time (t) and denote the difference between the weights of particle i and j at the time (t). The greater the difference between weights, the greater the probability that particle i will move to particle j. is the moving distance of the particles. The shorter the distance the particles move, the greater the probability. α and β respectively reflect the weight information and position information of the particles during the transfer process.
Step 6: Output state estimation
According to the steps above, the current state of target node 1 can be estimated by Equation (15), and let
t =
t + 1, return to Step 2.
At time (
t), the particle with the largest weight among all particles is selected and its corresponding particles index
L is calculated by the following equation:
where, in Equation (16), m represents each initial particle have
m directions, and
r is the index of the largest weight particle.
4. Observability Analysis of Cooperative Localization System with One Auxiliary Node
For discrete time-varying linear systems, Goshen-Meskin et al. proposed a Piece-Wise Constant System (PWCS) observability analysis theory [
33]. According to the motion characteristics of the system, the system can be divided into time segments and the observability matrix of each time segment can be calculated, so that the total observability matrix of the system can be obtained. The following introduces an observability analysis method based on singular value decomposition of the observability matrix of the system.
Without considering the process noise and the observation noise, the linearized system model is:
where,
For a set of observations
, based on the observability analysis theory of PWCS, the observability matrix of dynamic system is:
where
is the state transition matrix of the system, and
is the observation matrix.
The singular value decomposition of
is expressed as:
where
is an
dimensional orthogonal matrix;
is a
dimensional orthogonal matrix;
is a
dimensional matrix;
is a diagonal matrix composed of the singular value of
and 0.
. The singular value
of
is greater than 0. The magnitude of the singular value can effectively reflect the observability of the state of the system. The larger the singular value, the better the observability of the corresponding state.
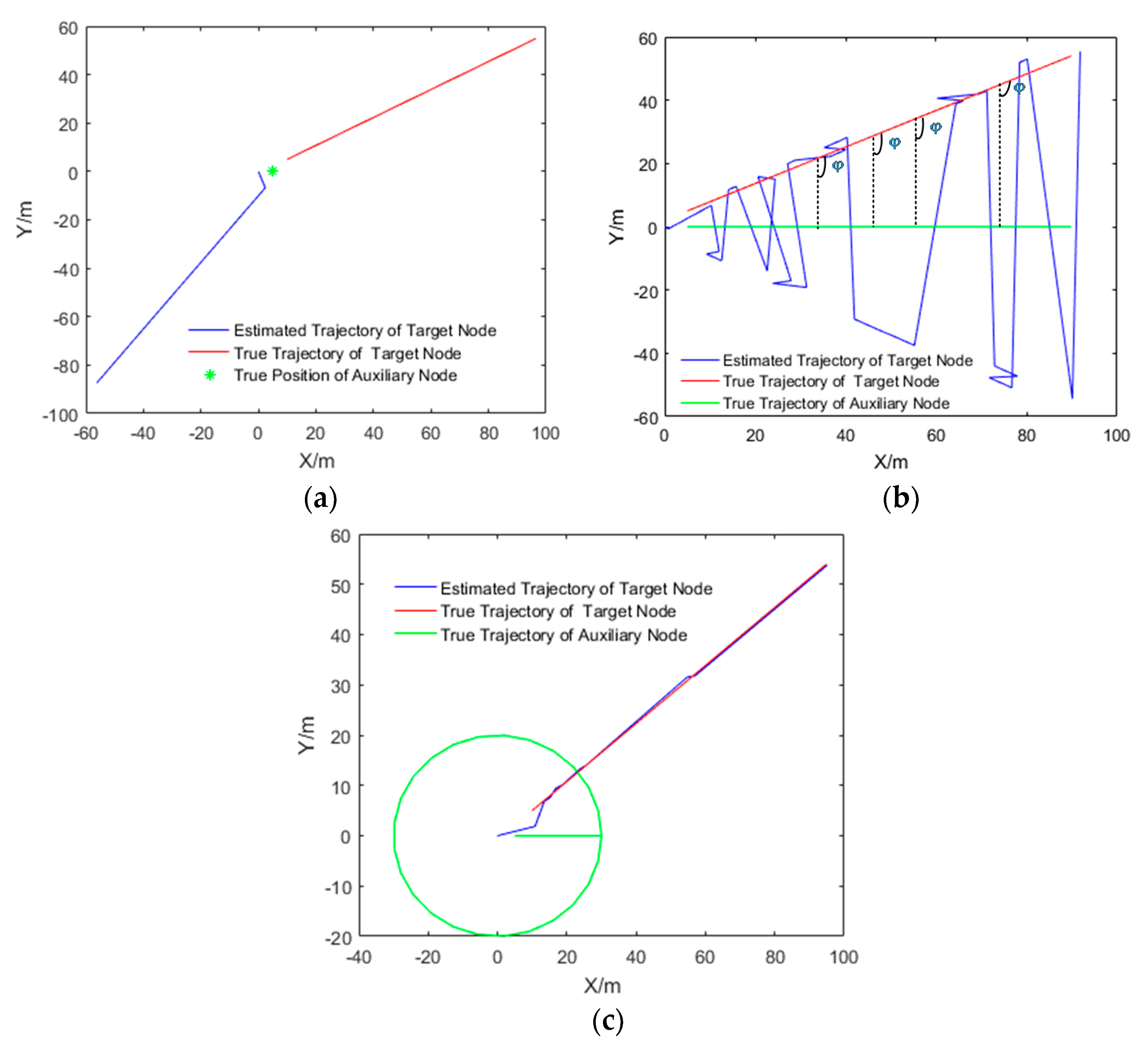
Gadre and Stilwell [
34] proposed that the system is locally unobservable when the auxiliary node is fixed or the range of target node to the auxiliary node located at the same relative direction. According to the observability analysis theory of PWCS, the observability of the system is determined by singular value
which is calculated by
. Suppose the target node (blue line) makes a linear motion with a slope of 0.5, the estimated trajectory of target node is shown in
Figure 5.
As shown in
Table 1, when the auxiliary node is fixed or the range of target node to the auxiliary node located at the same relative direction, there is a singular value of 0, which denotes the system is not observable. When the auxiliary node does not move with respect to the target node, the system is observable for the full rank of observable matrix
. Therefore, to make the system observable, in the process of cooperative localization, the PWCS observability analysis method can be used to optimize the appropriate auxiliary node trajectory.
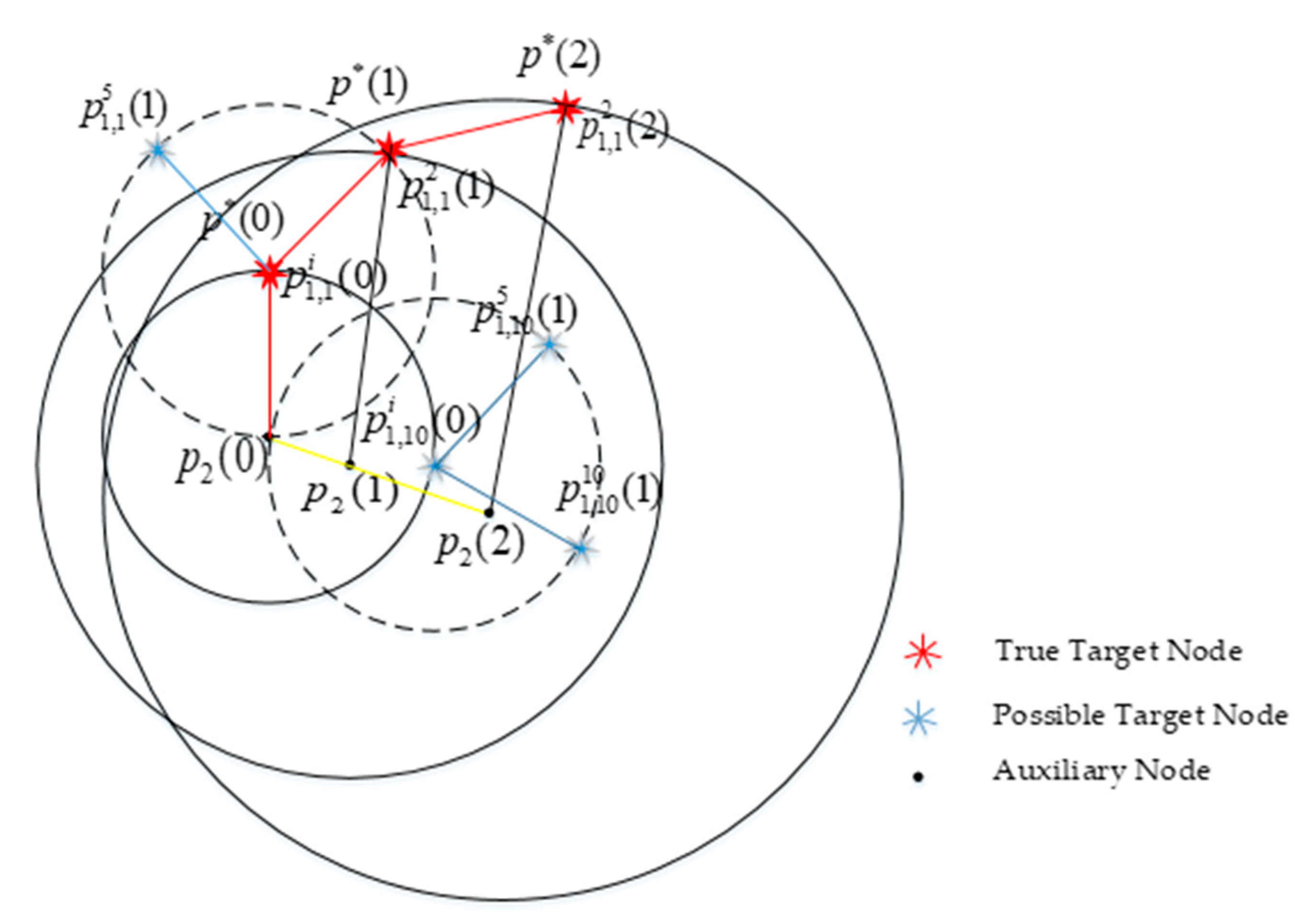
According to PF algorithm and DR model, if auxiliary node 2 is moving, the particles propagation of the AACOPF algorithm is shown in
Figure 6.
(
) are the possible positions of target node 1.
are the true position of target node 1, and
denotes the position of moving auxiliary node 2. At time (0),
particles are generated, and each particle is given m directions, after particles propagate by DR model, we can get
particles at time (1). The red line denotes the true trajectory of target node 1, the blue line is the estimated trajectory, and the yellow line denoted the true trajectory of auxiliary node 2. According to the proof of cooperative positioning algorithm, only when node 2 is in motion, the error converges, thus, the coordinates of the target node 1 can be estimated.
The cooperative localization algorithm is shown in Algorithm 1. By making use of the known information, such as the distance
between target node and auxiliary node, weight information
α, position information
β, threshold value
, displacement increment
, and azimuth increment
of target node, we can get the localization information
and initial azimuth
of the target node. In
Table 1,
denotes the predicted state of particle
k with initial azimuth
i at time (
t).
| Algorithm 1 Cooperative Localization Algorithm of Single Auxiliary Node |
1: Input: Number of initial particles N, Number of initial azimuth M, Euclidean distance , Displacement increment , Azimuth increment
2: Output: Estimation trajectory , azimuth
3: Generated initial particles
4: While localization do
5: for 0 < k < N do
6: for 0 < i < M do
7:
8:
9: end
10: end
11:
12: Particles weight
13: Moving distance
14: Transition probability
15: If
16: end
17: Estimation trajectory
18: Localization error
19: Azimuth
20: end |
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}