Cavity Ring-Down Methane Sensor for Small Unmanned Aerial Systems

Abstract
1. Introduction
2. Methods
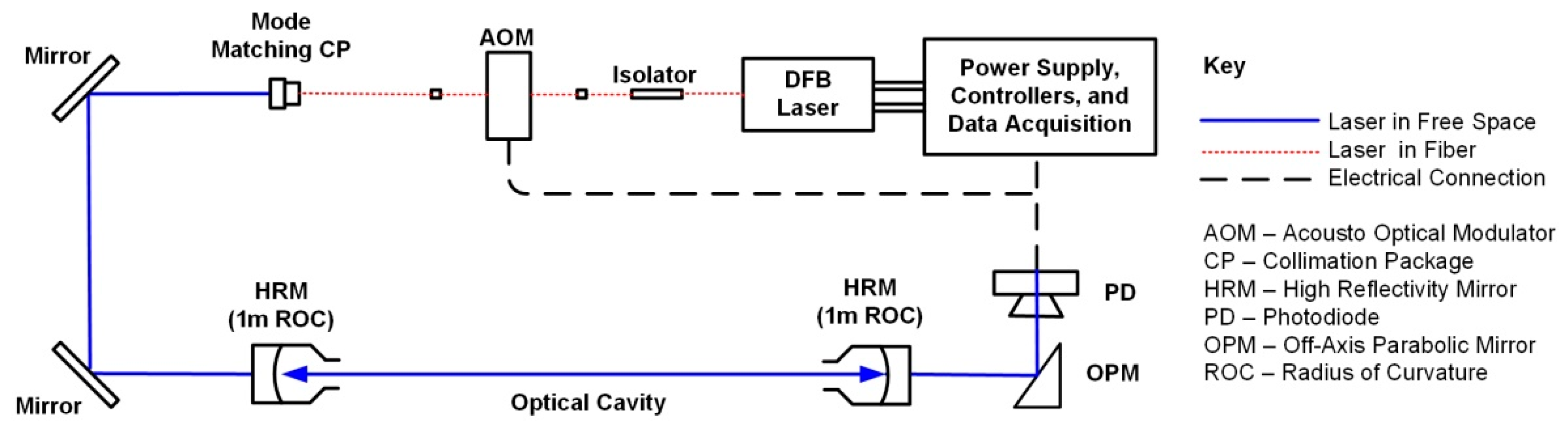
2.1. Open-Path Cavity Ring-Down Sensor
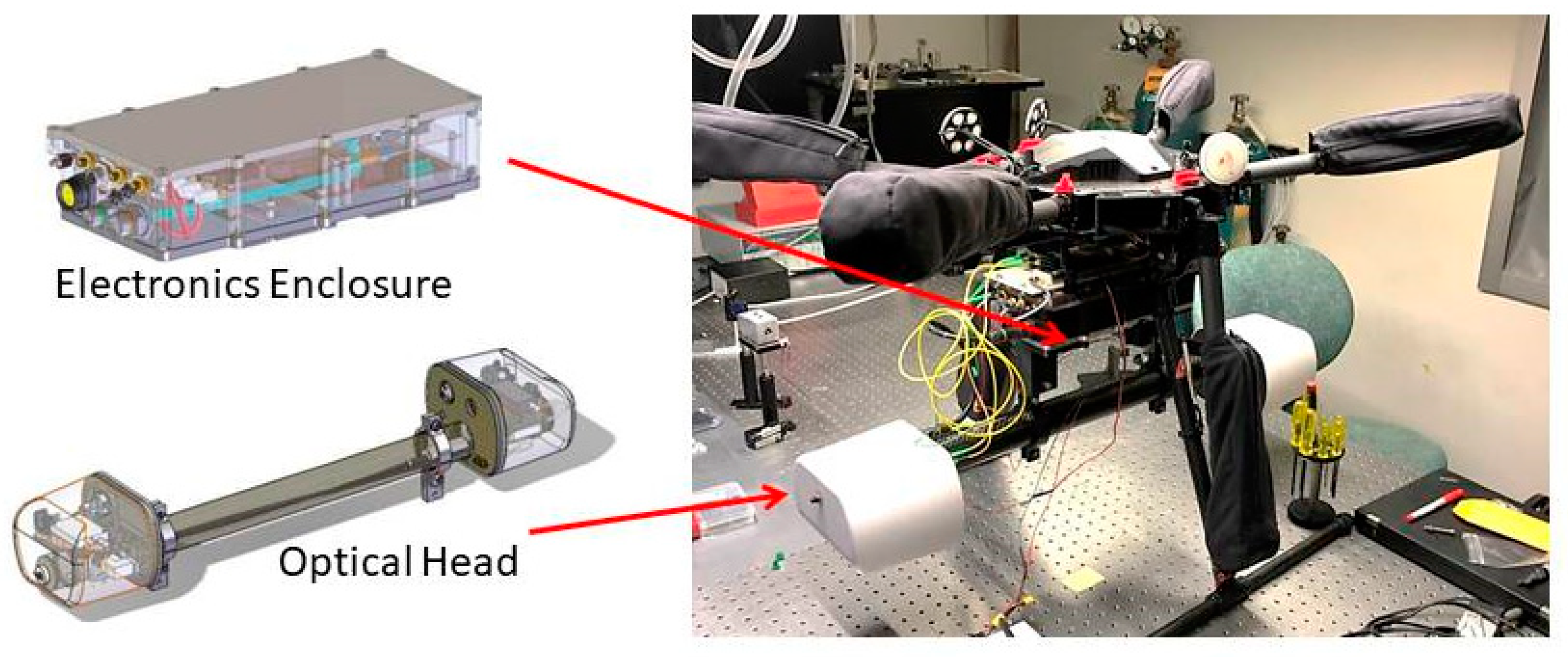
2.2. Hexacopter sUAS and Sensor Integration
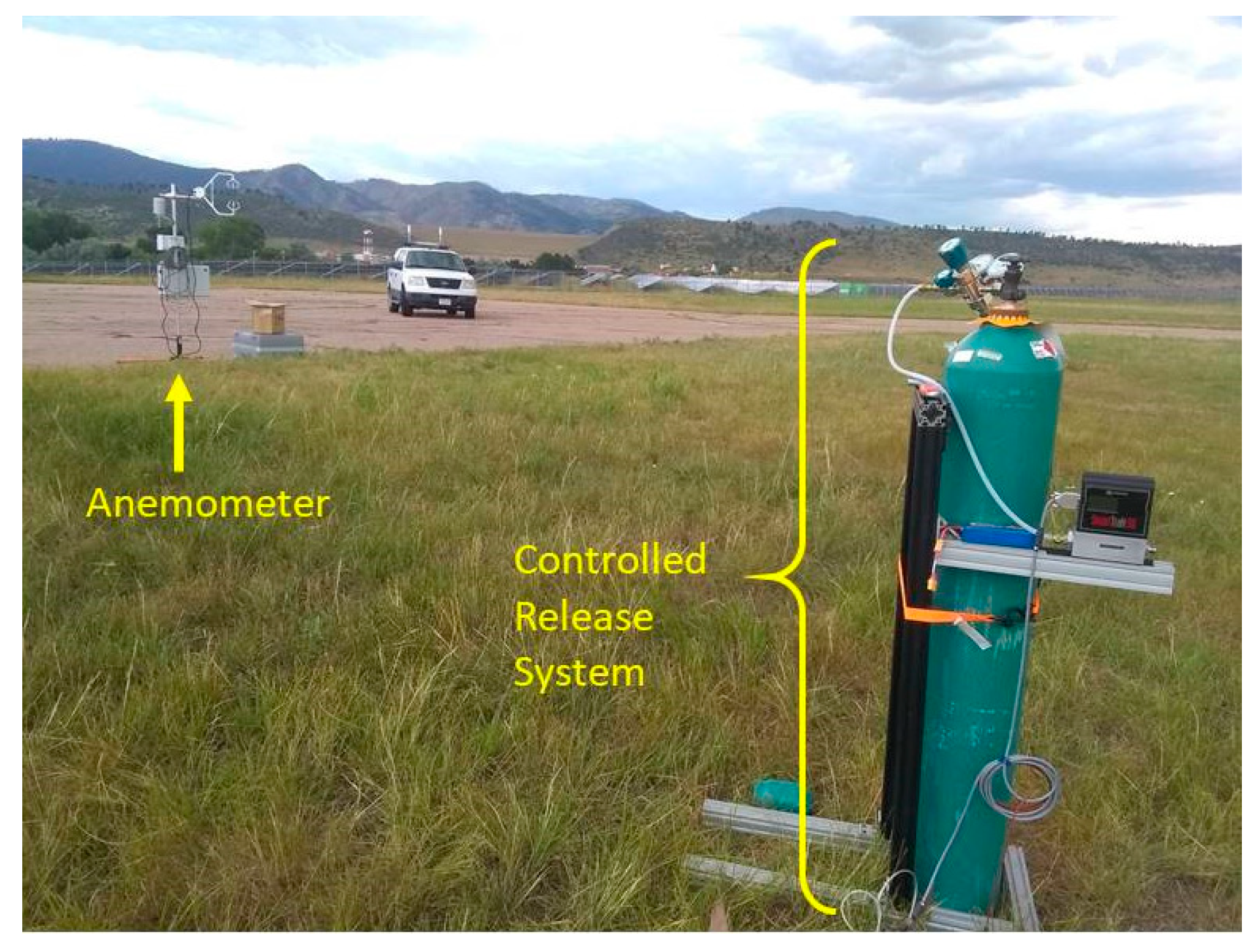
2.3. Controlled Release Setup
3. Results and Discussion
3.1. Flight Performance of sUAS
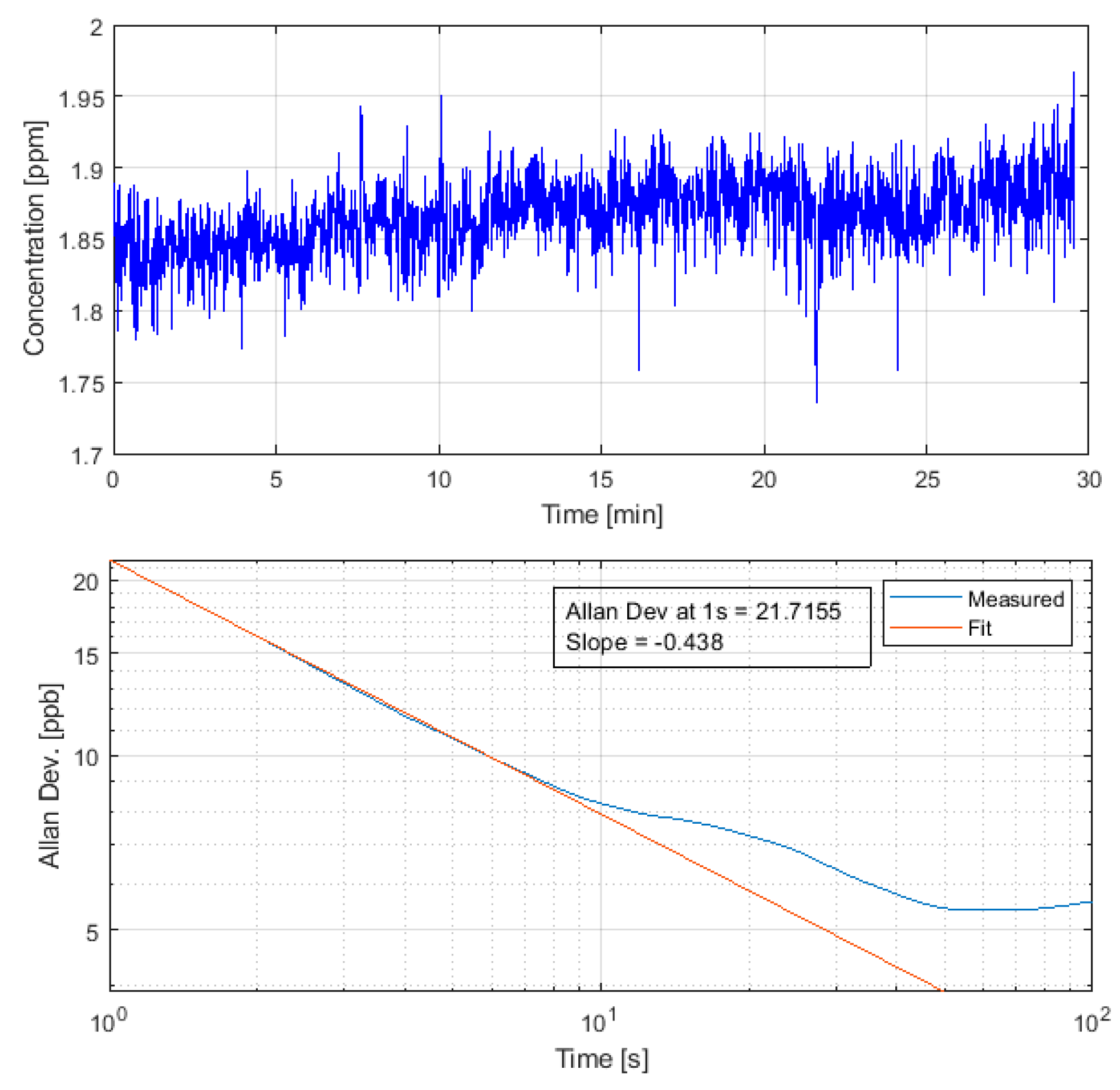
3.2. Methane Detection Sensitivity
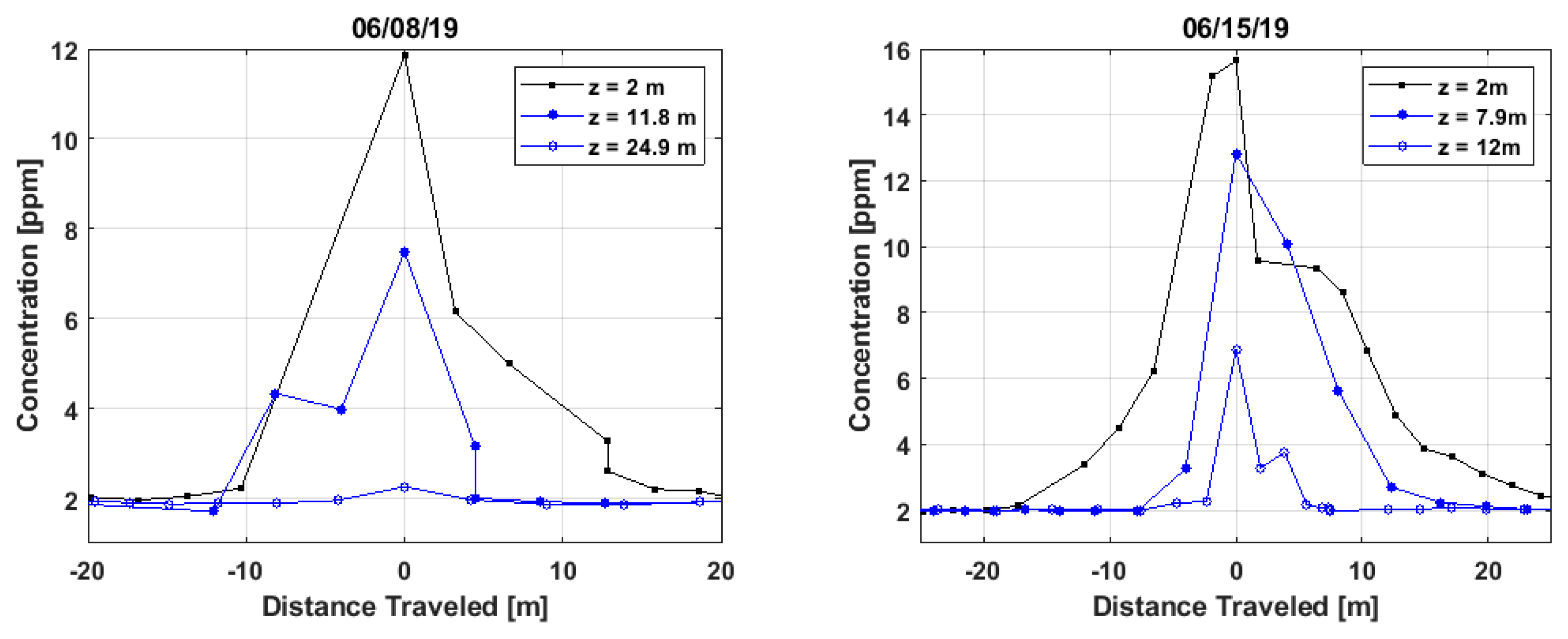
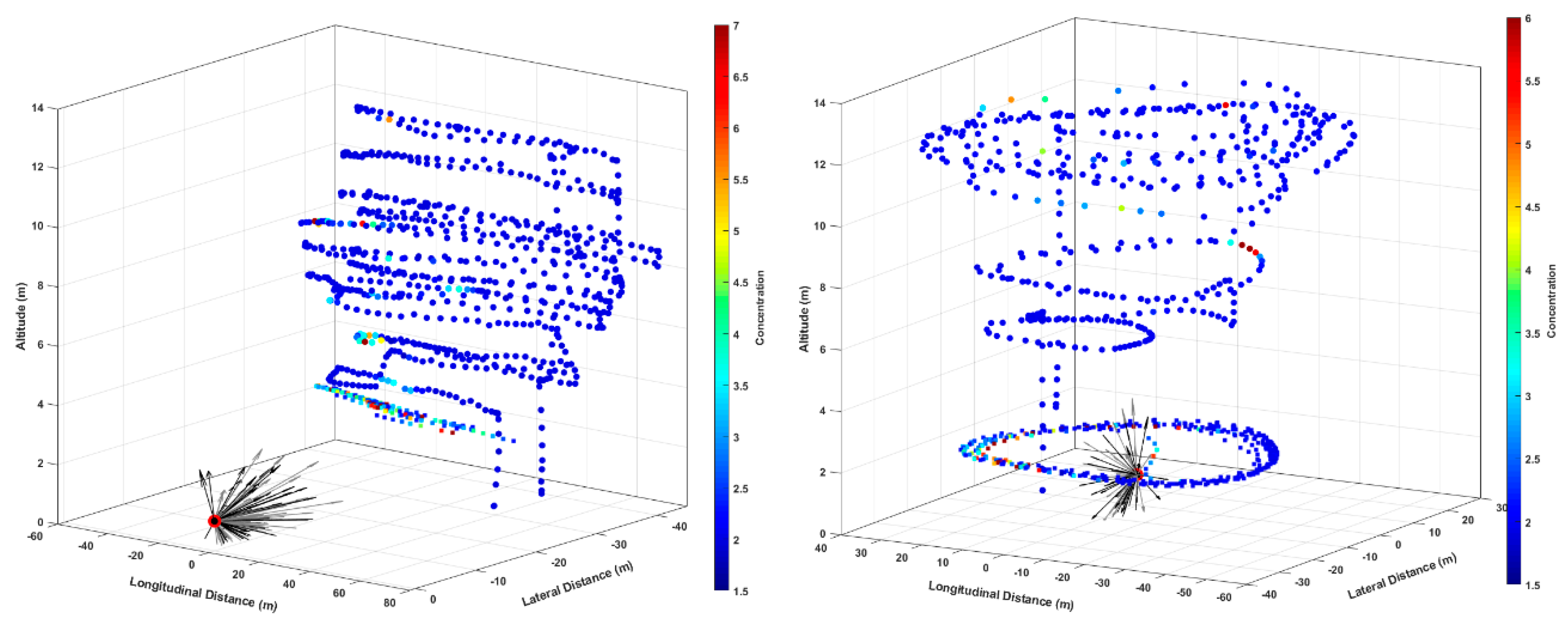
3.3. Methane Plume Detection
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kirschke, S.; Bousquet, P.; Ciais, P.; Saunois, M.; Canadell, J.G.; Dlugokencky, E.J.; Bergamaschi, P.; Bergmann, D.; Blake, D.R.; Bruhwiler, L. Three Decades of Global Methane Sources and Sinks. Nat. Geosci. 2013, 6, 813–823. [Google Scholar] [CrossRef]
- Pachauri, R.K.; Meyer, L. IPCC, 2014: Climate Change 2014: Synthesis Report. In Contribution of Working Groups I, II and III to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; IPCC: Geneva, Switzerland, 2014. [Google Scholar] [CrossRef]
- Derwent, R.G.; Jenkin, M.E.; Saunders, S.M. Photochemical Ozone Creation Potentials for a Large Number of Reactive Hydrocarbons under European Conditions. Atmos. Environ. 1996, 30, 181–199. [Google Scholar] [CrossRef]
- Pinault, J.L. Anthropogenic and Natural Radiative Forcing: Positive Feedbacks. J. Mar. Sci. Eng. 2018, 6, 146. [Google Scholar] [CrossRef]
- Smith, P.; Martino, D.; Cai, Z.; Gwary, D.; Janzen, H.; Kumar, P.; McCarl, B.; Ogle, S.; O’Mara, F.; Rice, C. Greenhouse Gas Mitigation in Agriculture. Philos. Trans. R. Soc. B Biol. Sci. 2008, 363, 789–813. [Google Scholar] [CrossRef]
- Themelis, N.J.; Ulloa, P.A. Methane Generation in Landfills. Renew. Energy 2007, 32, 1243–1257. [Google Scholar] [CrossRef]
- Alvarez, R.A.; Zavala-Araiza, D.; Lyon, D.R.; Allen, D.T.; Barkley, Z.R.; Brandt, A.R.; Davis, K.J.; Herndon, S.C.; Jacob, D.J.; Karion, A. Assessment of Methane Emissions from the U.S. Oil and Gas Supply Chain. Science 2018, 361, 186–188. [Google Scholar] [CrossRef]
- Colorado Oil and Gas Consercation Commission GISOnline. Available online: https://cogccmap.state.co.us/cogcc_gis_online/ (accessed on 6 January 2020).
- Bell, C.S.; Vaughn, T.L.; Zimmerle, D.; Herndon, S.C.; Yacovitch, T.I.; Heath, G.A.; Pétron, G.; Edie, R.; Field, R.A.; Murphy, S.M. Comparison of Methane Emission Estimates from Multiple Measurement Techniques at Natural Gas Production Pads. Elementa 2017, 5, 79. [Google Scholar] [CrossRef]
- Ravikumar, A.P.; Sreedhara, S.; Wang, J.; Englander, J.; Roda-Stuart, D.; Bell, C.; Zimmerle, D.; Lyon, D.; Mogstad, I.; Ratner, B. Single-Blind Inter-Comparison of Methane Detection Technologies—Results from the Stanford/EDF Mobile Monitoring Challenge. Elem. Sci. Anth. 2019, 7, 37. [Google Scholar] [CrossRef]
- Schuyler, T.; Guzman, M. Unmanned Aerial Systems for Monitoring Trace Tropospheric Gases. Atmosphere 2017, 8, 206. [Google Scholar] [CrossRef]
- Shah, A.; Pitt, J.; Kabbabe, K.; Allen, G. Suitability of a Non-Dispersive Infrared Methane Sensor Package for Flux Quantification Using an Unmanned Aerial Vehicle. Sensors 2019, 19, 4705. [Google Scholar] [CrossRef]
- Andersen, T.; Scheeren, B.; Peters, W.; Chen, H. A UAV-Based Active AirCore System for Measurements of Greenhouse Gases. Atmos. Meas. Tech. 2018, 11, 2683–2699. [Google Scholar] [CrossRef]
- Berman, E.S.F.; Fladeland, M.; Liem, J.; Kolyer, R.; Gupta, M. Greenhouse Gas Analyzer for Measurements of Carbon Dioxide, Methane, and Water Vapor Aboard an Unmanned Aerial Vehicle. Sens. Actuators B Chem. 2012, 169, 128–135. [Google Scholar] [CrossRef]
- Shah, A.; Allen, G.; Pitt, J.R.; Ricketts, H.; Williams, P.I.; Helmore, J.; Finlayson, A.; Robinson, R.; Kabbabe, K.; Hollingsworth, P. A Near-Field Gaussian Plume Inversion Flux Quantification Method, Applied to Unmanned Aerial Vehicle Sampling. Atmosphere 2019, 10, 396. [Google Scholar] [CrossRef]
- Allen, G.; Hollingsworth, P.; Kabbabe, K.; Pitt, J.R.; Mead, M.I.; Illingworth, S.; Roberts, G.; Bourn, M.; Shallcross, D.E.; Percival, C.J. The Development and Trial of an Unmanned Aerial System for the Measurement of Methane Flux from Landfill and Greenhouse Gas Emission Hotspots. Waste Manag. 2019, 87, 883–892. [Google Scholar] [CrossRef]
- Golston, L.M.; Tao, L.; Brosy, C.; Schäfer, K.; Wolf, B.; McSpiritt, J.; Buchholz, B.; Caulton, D.R.; Pan, D.; Zondlo, M.A. Lightweight Mid-Infrared Methane Sensor for Unmanned Aerial Systems. Appl. Phys. B Lasers Opt. 2017, 123, 1–9. [Google Scholar] [CrossRef]
- Nathan, B.J.; Golston, L.M.; O’Brien, A.S.; Ross, K.; Harrison, W.A.; Tao, L.; Lary, D.J.; Johnson, D.R.; Covington, A.N.; Clark, N.N. Near-Field Characterization of Methane Emission Variability from a Compressor Station Using a Model Aircraft. Environ. Sci. Technol. 2015, 49, 7896–7903. [Google Scholar] [CrossRef]
- Smith, B.J.; John, G.; Christensen, L.E.; Chen, Y. Fugitive Methane Leak Detection Using SUAS and Miniature Laser Spectrometer Payload: System, Application and Groundtruthing Tests. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; Volume 1, pp. 369–374. [Google Scholar] [CrossRef]
- Barchyn, T.; Hugenholtz, C.H.; Myshak, S.; Bauer, J. A UAV-Based System for Detecting Natural Gas Leaks. J. Unmanned Veh. Syst. 2017, 6, 18–30. [Google Scholar] [CrossRef]
- Barchyn, T.E.; Hugenholtz, C.H.; Fox, T.A. Plume Detection Modeling of a Drone-Based Natural Gas Leak Detection System. Elem. Sci. Anth. 2019, 7, 41. [Google Scholar] [CrossRef]
- Tuzson, B.; Stanicki, B.; Chang, L. A Compact QCL Absorption Spectrometer for Mobile High-Precision Methane Measurements Aboard Drones. In Proceedings of the 21st Eurpoean Geosceinces Union General Assembly, Vienna, Austria, 7–12 April 2019; p. 5250. [Google Scholar]
- Emran, B.J.; Tannant, D.D.; Najjaran, H. Low-Altitude Aerial Methane Concentration Mapping. Remote Sens. 2017, 9, 823. [Google Scholar] [CrossRef]
- Yang, S.; Talbot, R.W.; Frish, M.B.; Golston, L.M.; Aubut, N.F.; Zondlo, M.A.; Gretencord, C.; McSpiritt, J. Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Measurement System Description and Mass Balance Approach. Atmosphere 2018, 9, 383. [Google Scholar] [CrossRef]
- Berden, G.; Peeters, R.; Meijer, G. Cavity Ring-down Spectroscopy: Experimental Schemes and Applications. Int. Rev. Phys. Chem. 2000, 19, 565–607. [Google Scholar] [CrossRef]
- Paldus, B.A.; Kachanov, A.A. An Historical Overview of Cavity-Enhanced Methods. Can. J. Phys. 2005, 83, 975–999. [Google Scholar] [CrossRef]
- McHale, L.E.; Hecobian, A.; Yalin, A.P. Open-Path Cavity Ring-down Spectroscopy for Trace Gas Measurements in Ambient Air. Opt. Express 2016, 24, 5523. [Google Scholar] [CrossRef] [PubMed]
- Mchale, L.E.; Martinez, B.; Miller, T.W.; Yalin, A.P. Open-Path Cavity Ring-down Methane Sensor for Mobile Monitoring of Natural Gas Emissions. Opt. Express 2019, 27, 20084. [Google Scholar] [CrossRef]
- Kogelnik, H.; Li, T. Laser Beams and Resonators. Proc. IEEE 1966, 54, 1312–1329. [Google Scholar] [CrossRef]
- Dudek, J.B.; Tarsa, P.B.; Velasquez, A.; Wladyslawski, M.; Rabinowitz, P.; Lehmann, K.K. Trace Moisture Detection Using Continuous-Wave Cavity Ring-down Spectroscopy. Anal. Chem. 2003, 75, 4599–4605. [Google Scholar] [CrossRef]
- Rothman, L.S.; Gordon, I.E.; Babikov, Y.; Barbe, A.; Chris Benner, D.; Bernath, P.F.; Birk, M.; Bizzocchi, L.; Boudon, V.; Brown, L.R. The HITRAN2012 Molecular Spectroscopic Database. J. Quant. Spectrosc. Radiat. Transf. 2013, 130, 4–50. [Google Scholar] [CrossRef]
- Werle, P.; Miicke, R.; Slemr, F. The Limits of Signal Averaging in Atmopheric Trace-Gas Monitoring by Tunable Diode-Laser Absorption (TDLAS). Appl. Phys. B 1993, 57, 131–139. [Google Scholar] [CrossRef]
- Huang, H.; Lehmann, K.K. Long-Term Stability in Continuous Wave Cavity Ringdown Spectroscopy Experiments. Appl. Opt. 2010, 49, 1378–1387. [Google Scholar] [CrossRef]
- Khan, A.; Schaefer, D.; Tao, L.; Miller, D.J.; Sun, K.; Zondlo, M.A.; Harrison, W.A.; Roscoe, B.; Lary, D.J. Low Power Greenhouse Gas Sensors for Unmanned Aerial Vehicles. Remote Sens. 2012, 4, 1355–1368. [Google Scholar] [CrossRef]
- Zheng, Y.; Yang, S.; Liu, X.; Wang, J.; Norton, T.; Chen, J.; Tan, Y. The Computational Fluid Dynamic Modeling of Downwash Flow Field for a Six-Rotor UAV. Front. Agric. Sci. Eng. 2018, 5, 159–167. [Google Scholar] [CrossRef]
- Yang, F.B.; Xue, X.Y.; Zhang, L.; Sun, Z. Numerical Simulation and Experimental Verification on Downwash Air Flow of Six-Rotor Agricultural Unmanned Aerial Vehicle in Hover. Int. J. Agric. Biol. Eng. 2017, 10, 41–53. [Google Scholar] [CrossRef]
- Albertson, J.D.; Harvey, T.; Foderaro, G.; Zhu, P.; Zhou, X.; Ferrari, S.; Amin, M.S.; Modrak, M.; Brantley, H.; Thoma, E.D. A Mobile Sensing Approach for Regional Surveillance of Fugitive Methane Emissions in Oil and Gas Production. Environ. Sci. Technol. 2016, 50, 2487–2497. [Google Scholar] [CrossRef] [PubMed]
- Brantley, H.L.; Thoma, E.D.; Squier, W.C.; Guven, B.B.; Lyon, D. Assessment of Methane Emissions from Oil and Gas Production Pads Using Mobile Measurements. Environ. Sci. Technol. 2014, 48, 14508–14515. [Google Scholar] [CrossRef]
- Caulton, D.R.; Li, Q.; Bou-Zeid, E.; Fitts, J.P.; Golston, L.M.; Pan, D.; Lu, J.; Lane, H.M.; Buchholz, B.; Guo, X. Quantifying Uncertainties from Mobile-Laboratory-Derived Emissions of Well Pads Using Inverse Gaussian Methods. Atmos. Chem. Phys. 2018, 18, 15145–15168. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| sUAS Platform | DJI Matrice 600 |
|---|---|
| Mass | 13.2 kg |
| Battery | TB47S |
| Max. Duration | ~12 min |
| Typical Speed | 2.7 m/s |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martinez, B.; Miller, T.W.; Yalin, A.P. Cavity Ring-Down Methane Sensor for Small Unmanned Aerial Systems. Sensors 2020, 20, 454. https://doi.org/10.3390/s20020454
Martinez B, Miller TW, Yalin AP. Cavity Ring-Down Methane Sensor for Small Unmanned Aerial Systems. Sensors. 2020; 20(2):454. https://doi.org/10.3390/s20020454
Chicago/Turabian StyleMartinez, Benjamin, Thomas W. Miller, and Azer P. Yalin. 2020. "Cavity Ring-Down Methane Sensor for Small Unmanned Aerial Systems" Sensors 20, no. 2: 454. https://doi.org/10.3390/s20020454
APA StyleMartinez, B., Miller, T. W., & Yalin, A. P. (2020). Cavity Ring-Down Methane Sensor for Small Unmanned Aerial Systems. Sensors, 20(2), 454. https://doi.org/10.3390/s20020454