Figure 1.
The wooden building of the passive standard located in the Faculty of Civil Engineering, VSB—TU Ostrava with selected smart home (SH) rooms R204, R203, and R104 [
15].
Figure 1.
The wooden building of the passive standard located in the Faculty of Civil Engineering, VSB—TU Ostrava with selected smart home (SH) rooms R204, R203, and R104 [
15].
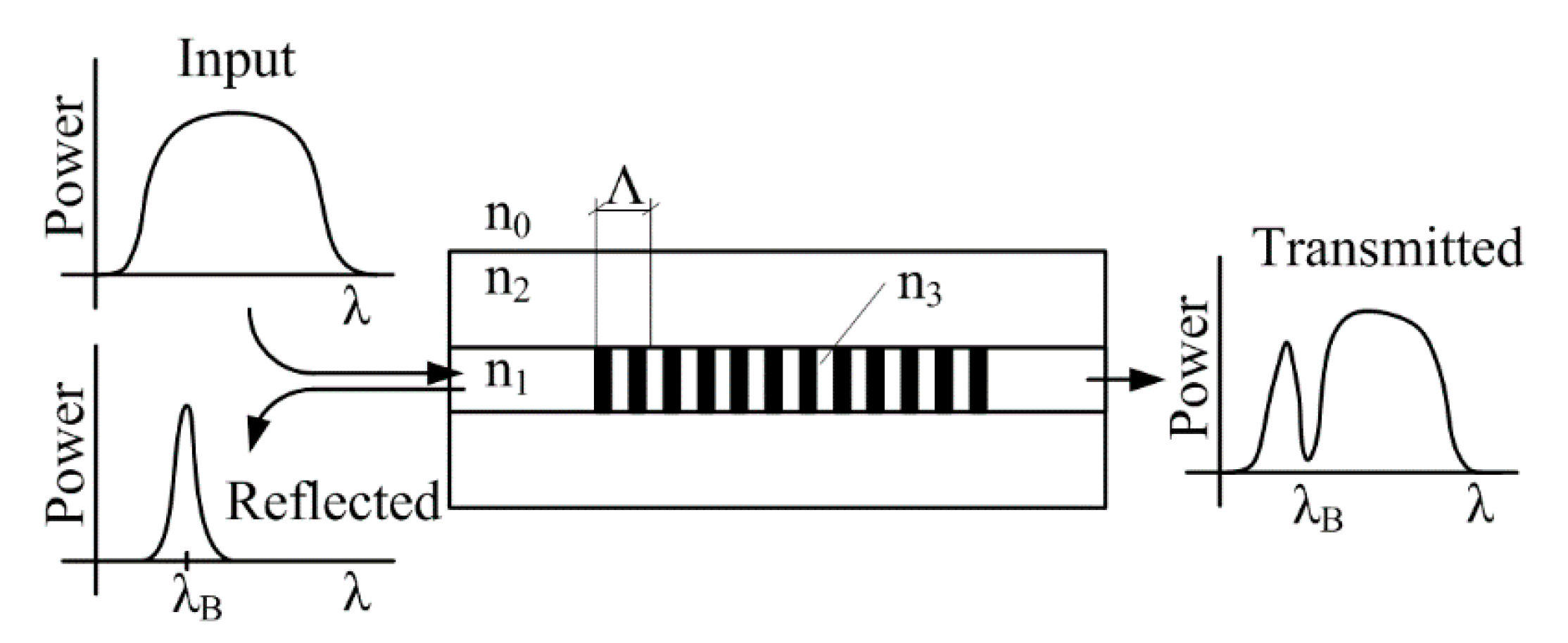
Figure 2.
The Bragg grating principle.
Figure 2.
The Bragg grating principle.
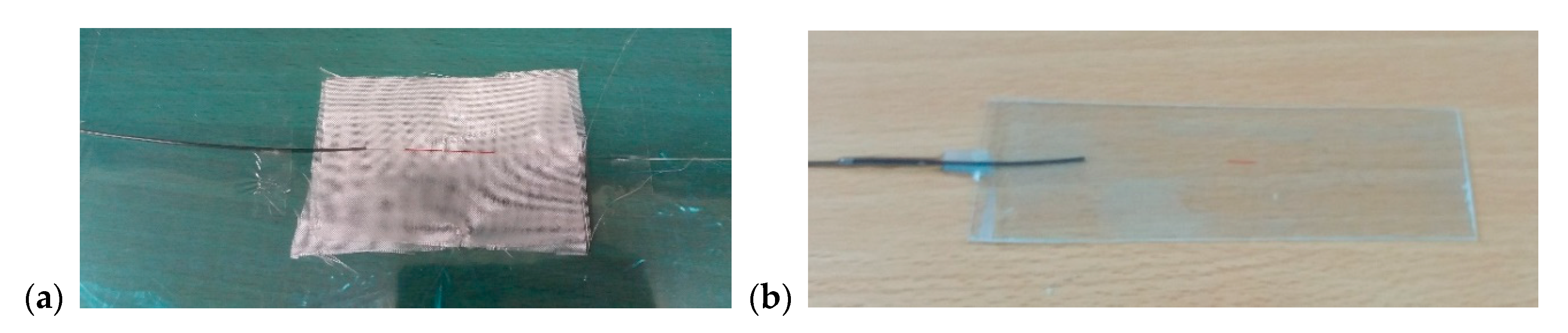
Figure 3.
Implementation of the sensor by encapsulating the Bragg grating in fibreglass (a); the resulting fibre Bragg grating (FBG) fibreglass sensor (b).
Figure 3.
Implementation of the sensor by encapsulating the Bragg grating in fibreglass (a); the resulting fibre Bragg grating (FBG) fibreglass sensor (b).
Figure 4.
Placement of FBG sensors on the staircase in the smart home (SH), room R104.
Figure 4.
Placement of FBG sensors on the staircase in the smart home (SH), room R104.
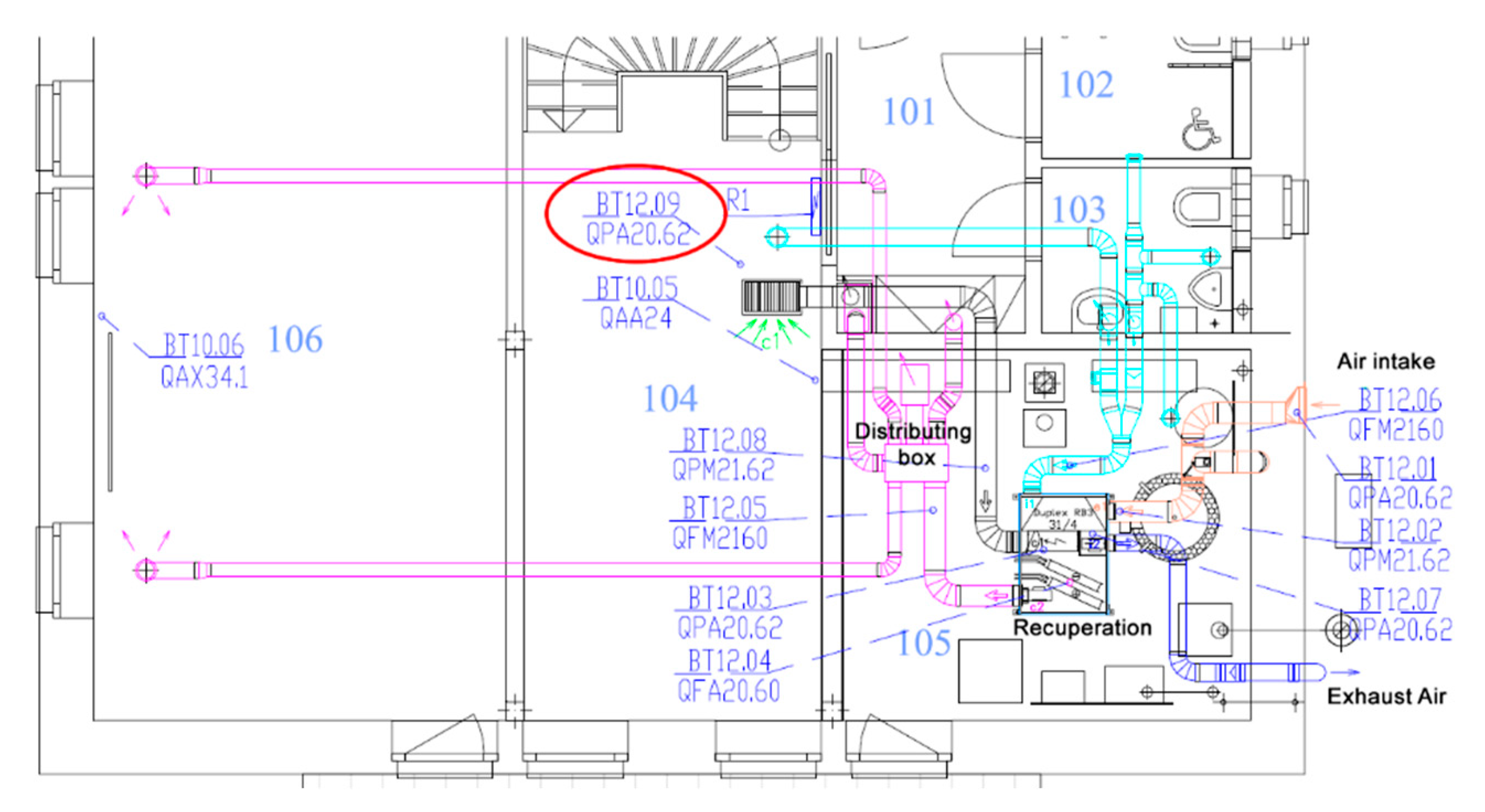
Figure 5.
The ground plan of the ground floor of the SH with the location of the sensors for CO2 measurement.
Figure 5.
The ground plan of the ground floor of the SH with the location of the sensors for CO2 measurement.
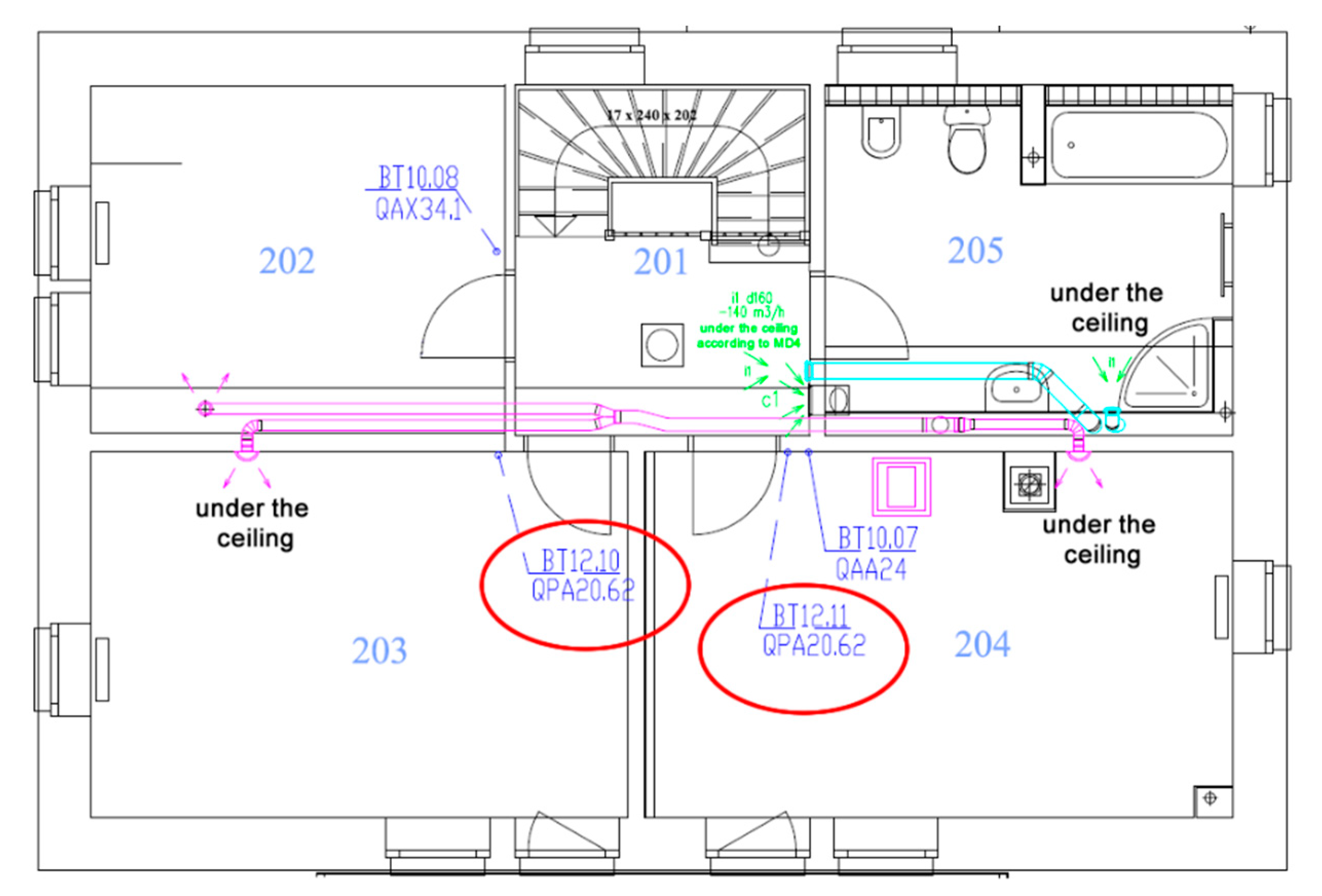
Figure 6.
The ground plan of the first floor of the SH with the location of the sensors for CO2 measurement.
Figure 6.
The ground plan of the first floor of the SH with the location of the sensors for CO2 measurement.
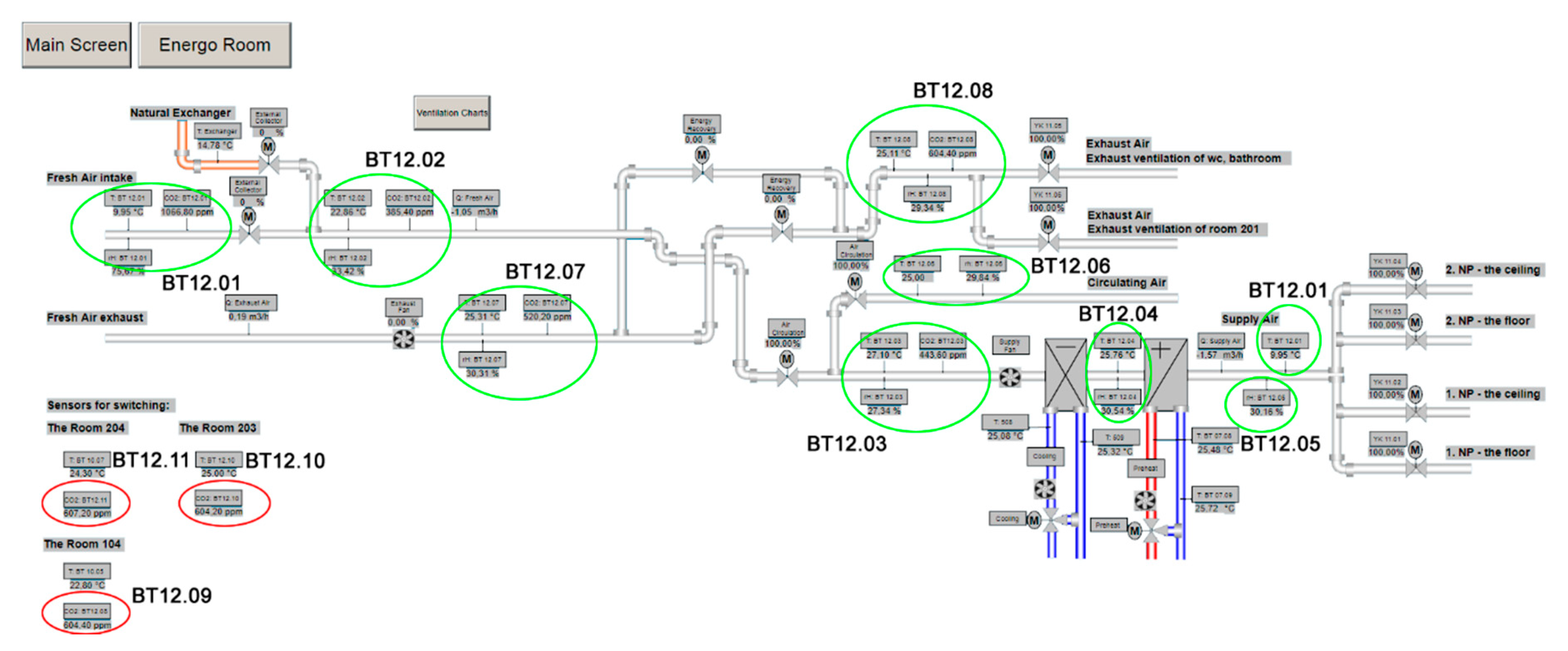
Figure 7.
The ventilation distribution technology with the location of the individual sensors for CO2 measurement in an SH.
Figure 7.
The ventilation distribution technology with the location of the individual sensors for CO2 measurement in an SH.
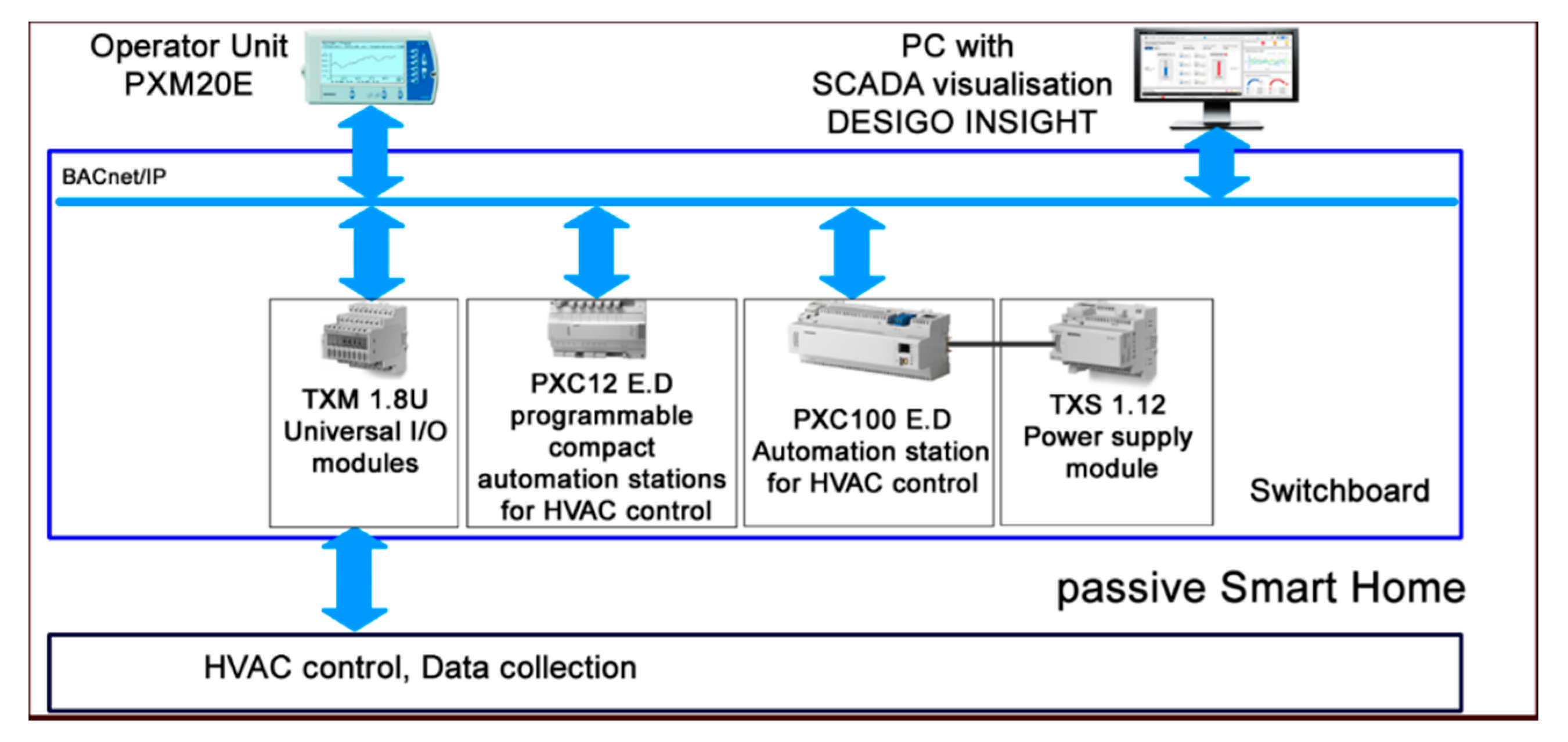
Figure 8.
Block diagram of the BACnet technology used in an SH for HVAC control.
Figure 8.
Block diagram of the BACnet technology used in an SH for HVAC control.
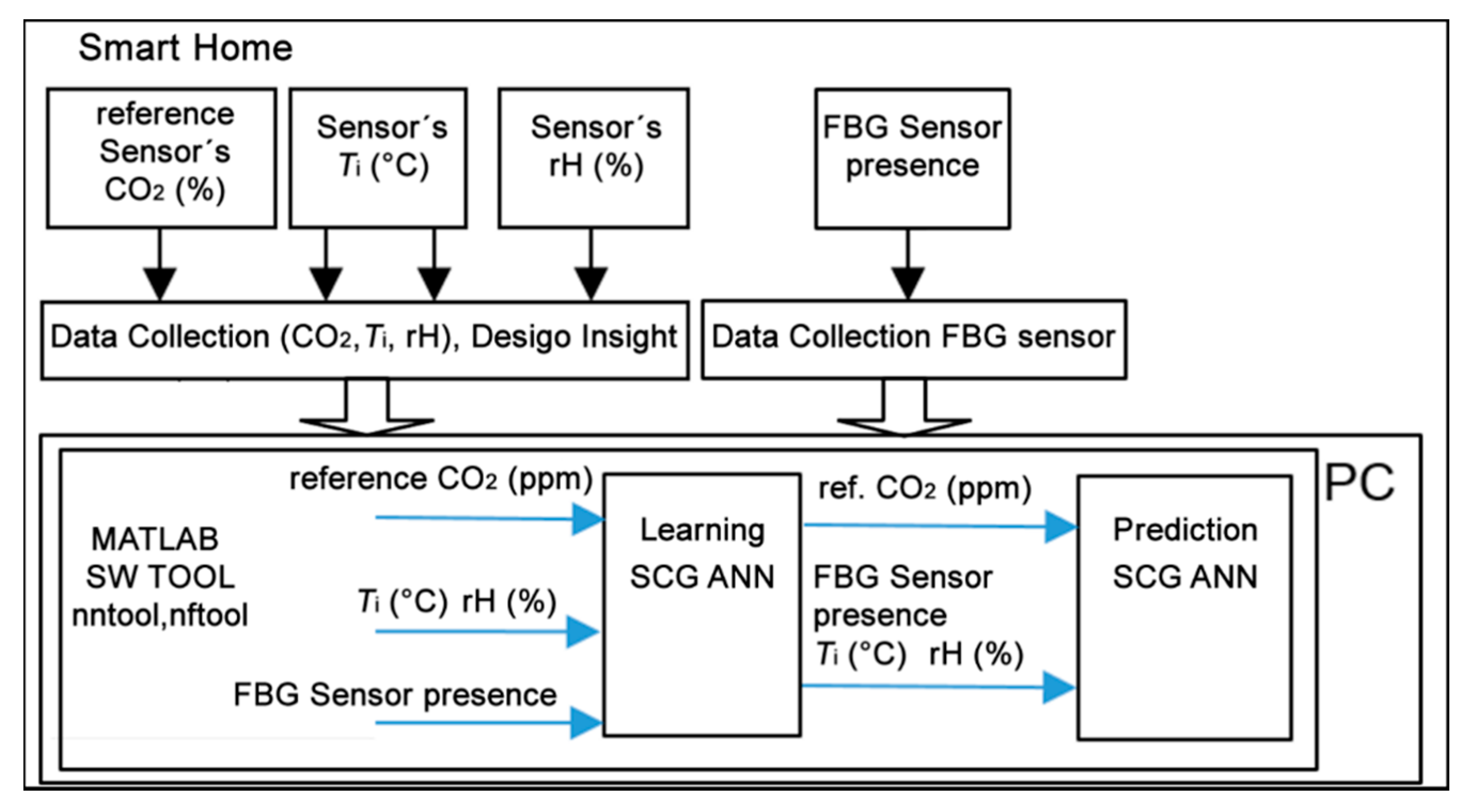
Figure 9.
Block diagram describing processing of the data measured by means of a scaled conjugate gradient artificial neural network (ANN SCG) within the method devised for CO2 prediction.
Figure 9.
Block diagram describing processing of the data measured by means of a scaled conjugate gradient artificial neural network (ANN SCG) within the method devised for CO2 prediction.
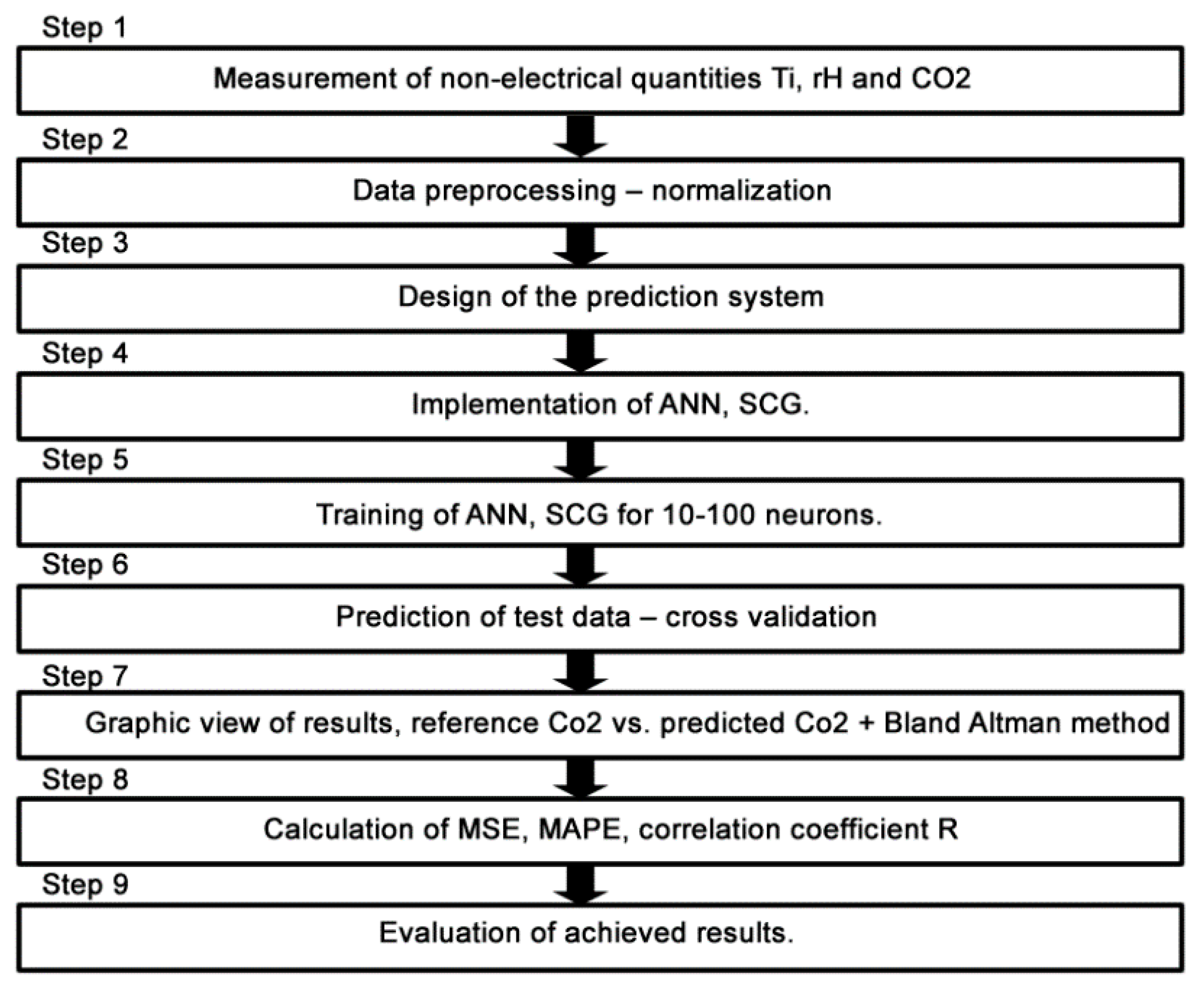
Figure 10.
Block scheme summarizing the experiment steps.
Figure 10.
Block scheme summarizing the experiment steps.
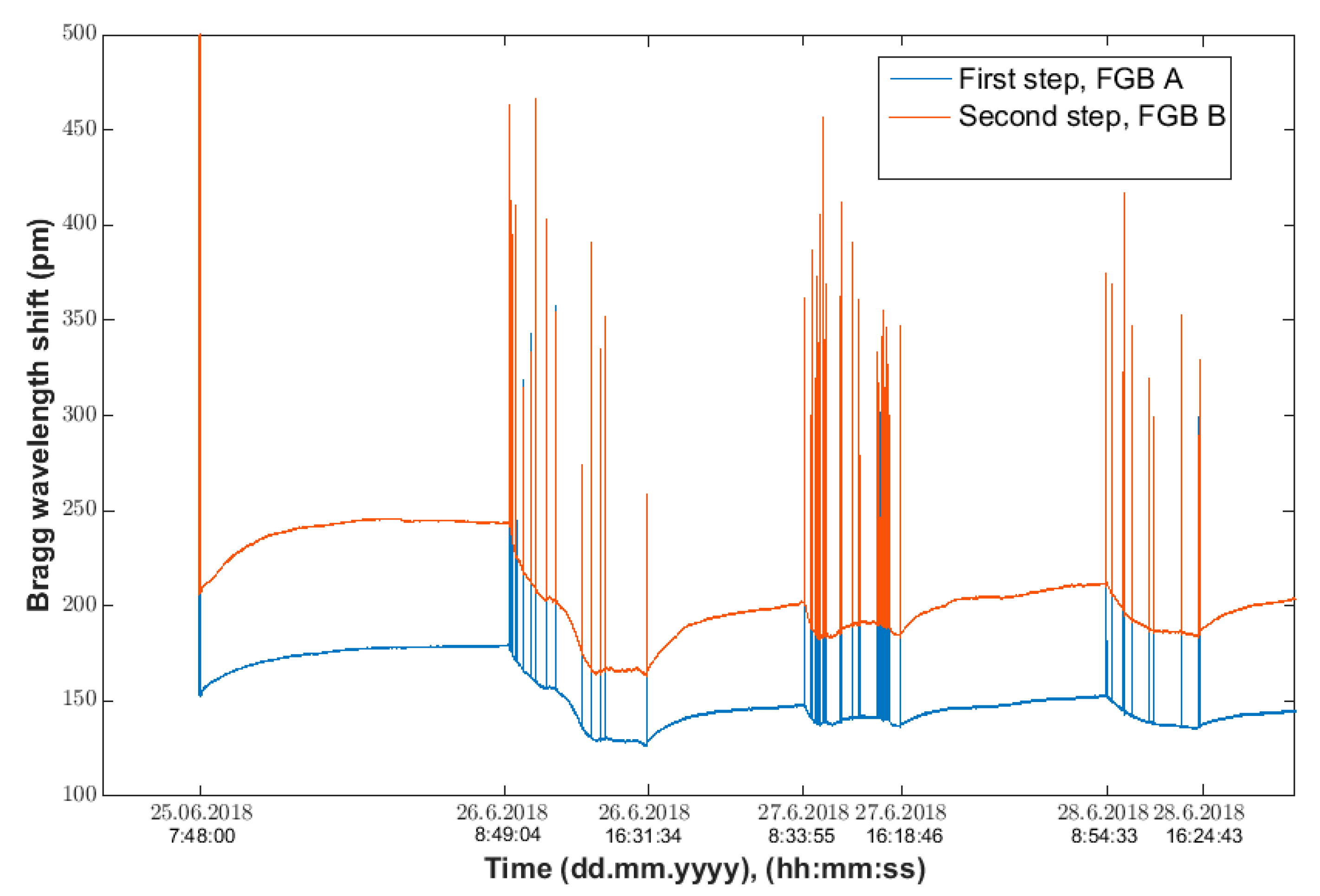
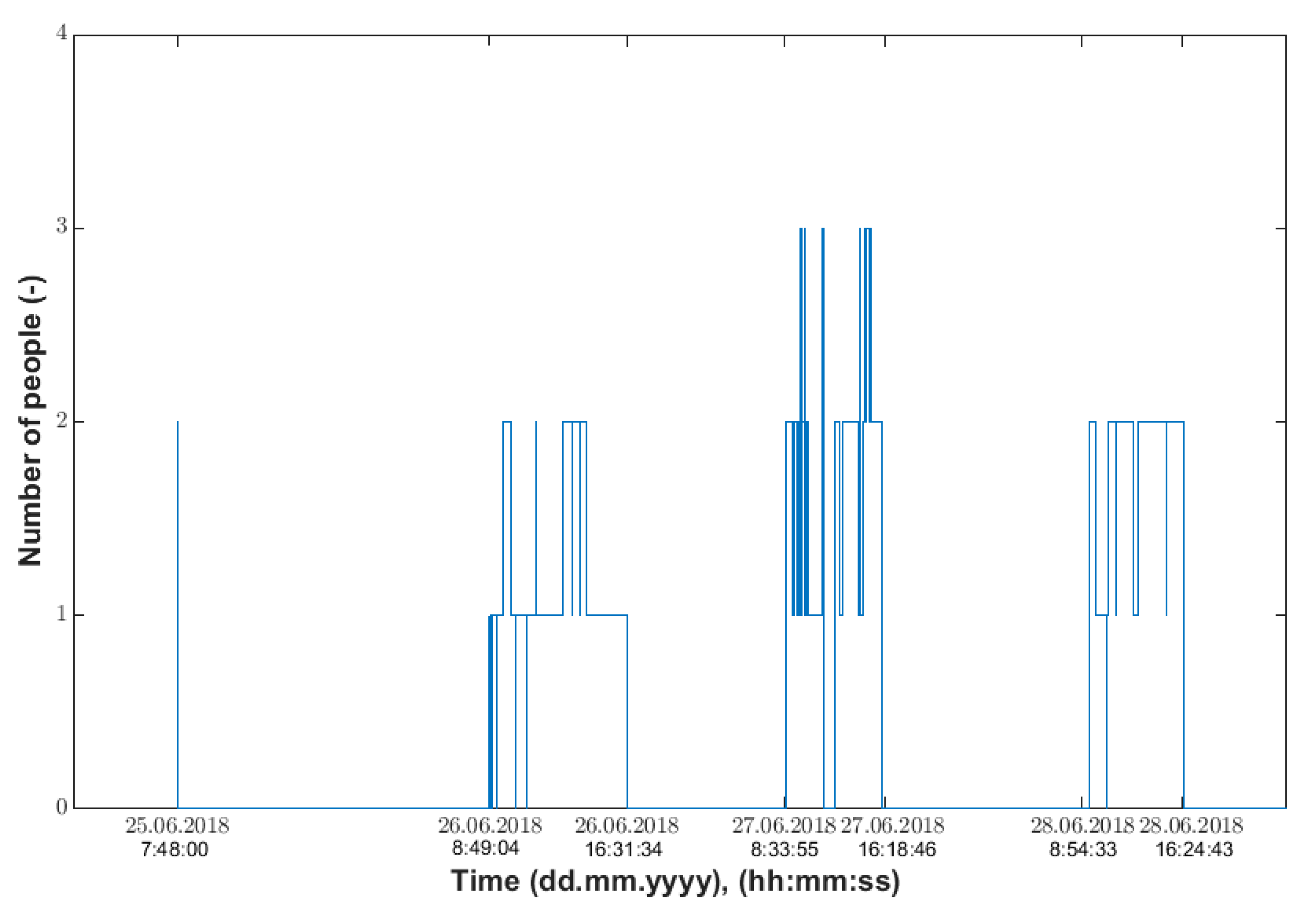
Figure 11.
The waveform of signals from FBG A and FBG B sensors during the 24-h measurement of recognition of the number occupants in room R104 in the period from 25 June 2018 (7:48:00), to 28 June 2018 (23:59:00).
Figure 11.
The waveform of signals from FBG A and FBG B sensors during the 24-h measurement of recognition of the number occupants in room R104 in the period from 25 June 2018 (7:48:00), to 28 June 2018 (23:59:00).
Figure 12.
First floor of the recognition of the number occupants obtained from the measurement conducted in the period from 25 June 2018 (7:48:00), to 28 June 2018 (23:59:00).
Figure 12.
First floor of the recognition of the number occupants obtained from the measurement conducted in the period from 25 June 2018 (7:48:00), to 28 June 2018 (23:59:00).
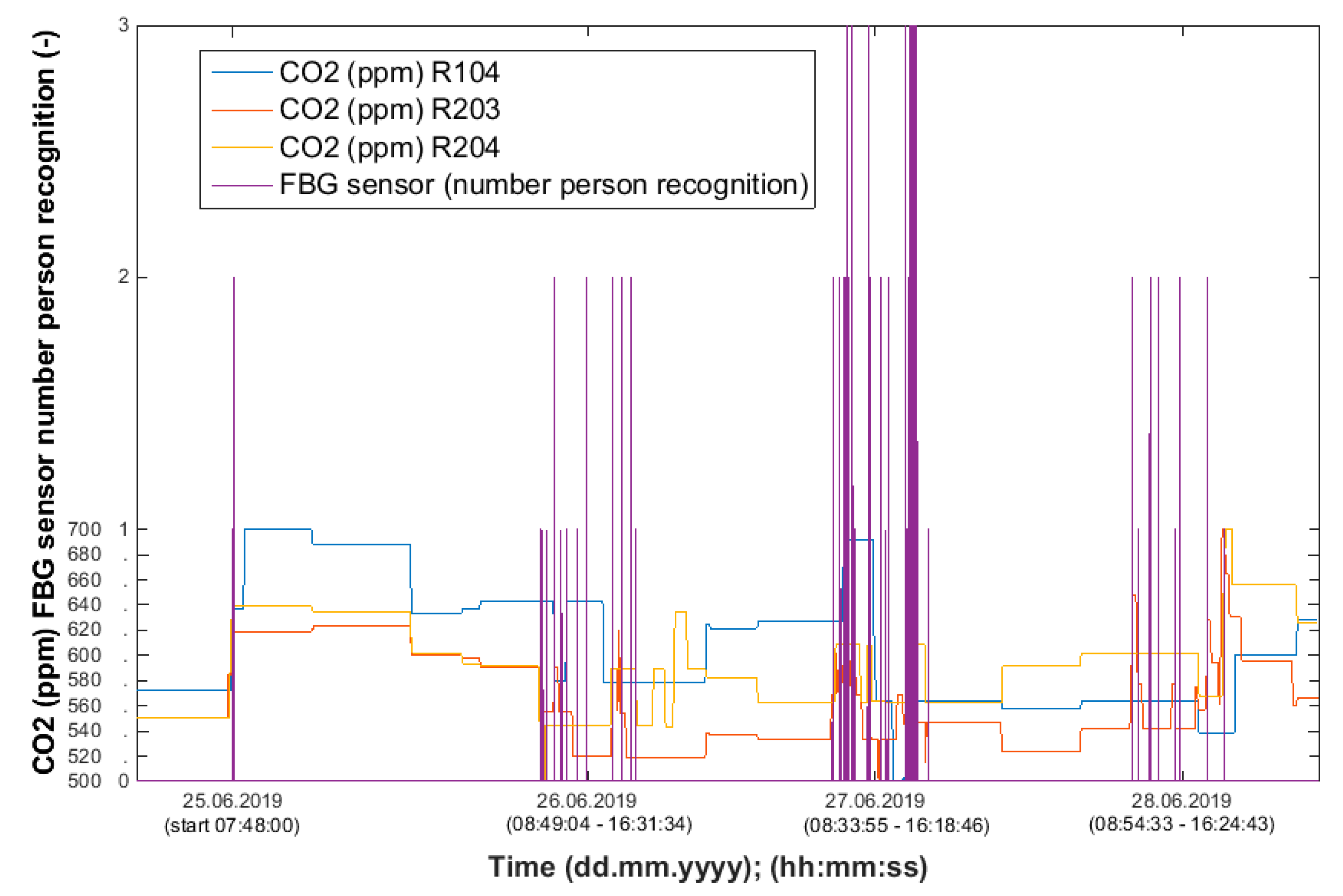
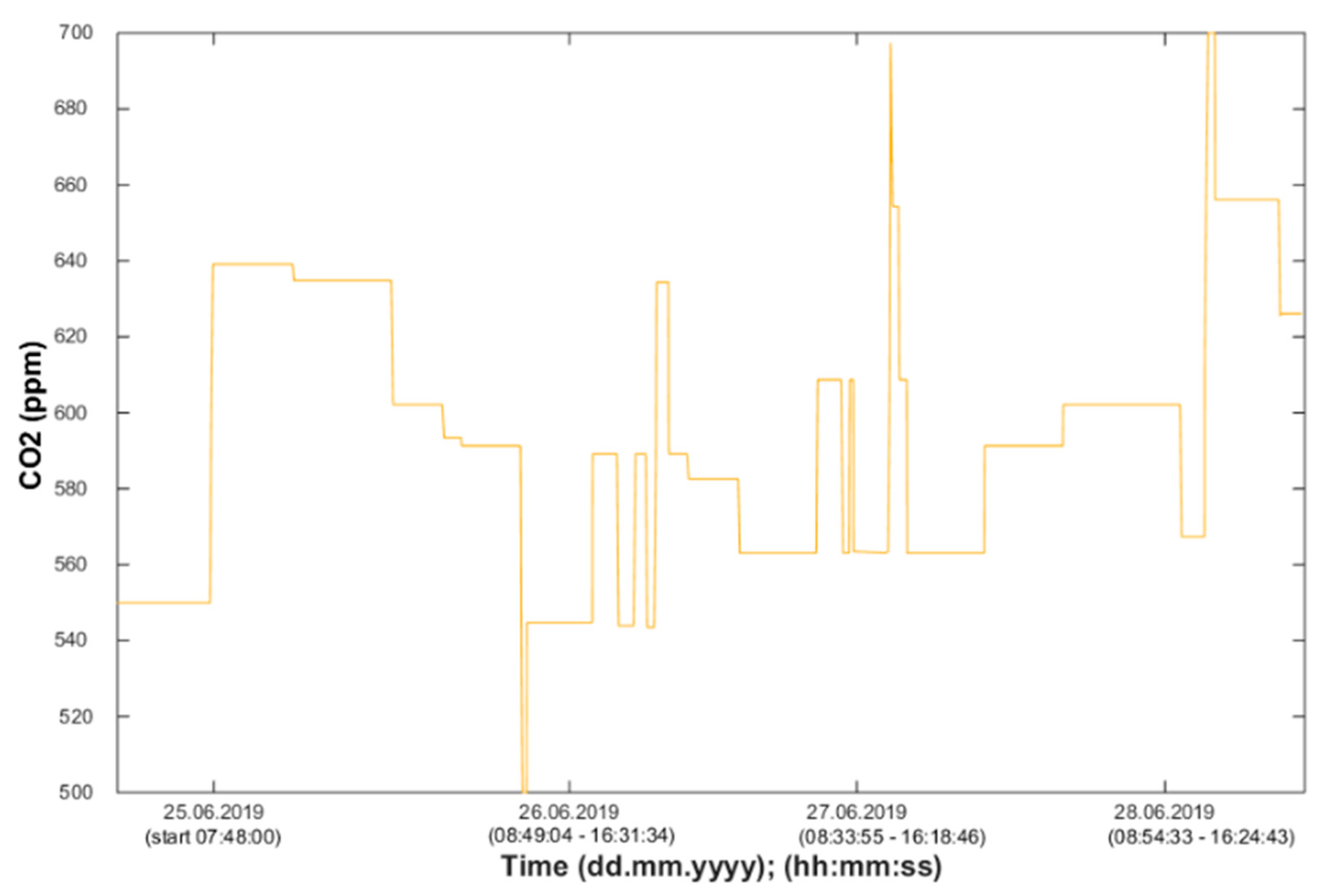
Figure 13.
Waveforms of the CO2 concentration values measured in SH rooms R104 (BT 12.09), R203 (BT 12.10), R204 (BT 12.11) in order to detect the occupancy of the monitored spaces with the representation of the recognition of the number of occupants in room R104 using the FBG sensor.
Figure 13.
Waveforms of the CO2 concentration values measured in SH rooms R104 (BT 12.09), R203 (BT 12.10), R204 (BT 12.11) in order to detect the occupancy of the monitored spaces with the representation of the recognition of the number of occupants in room R104 using the FBG sensor.
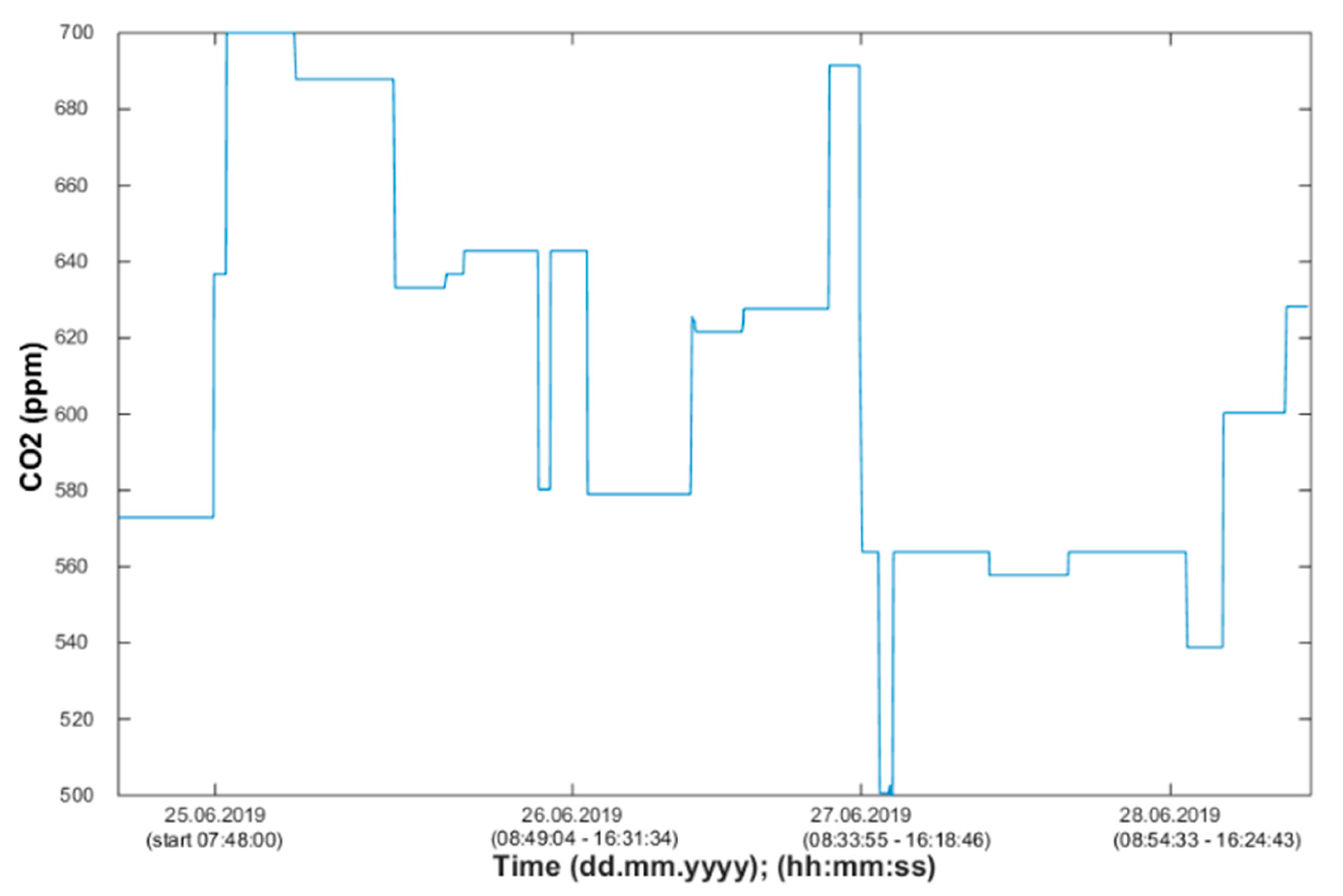
Figure 14.
Waveforms of the CO2 concentration values measured in SH room R104 (BT 12.09).
Figure 14.
Waveforms of the CO2 concentration values measured in SH room R104 (BT 12.09).
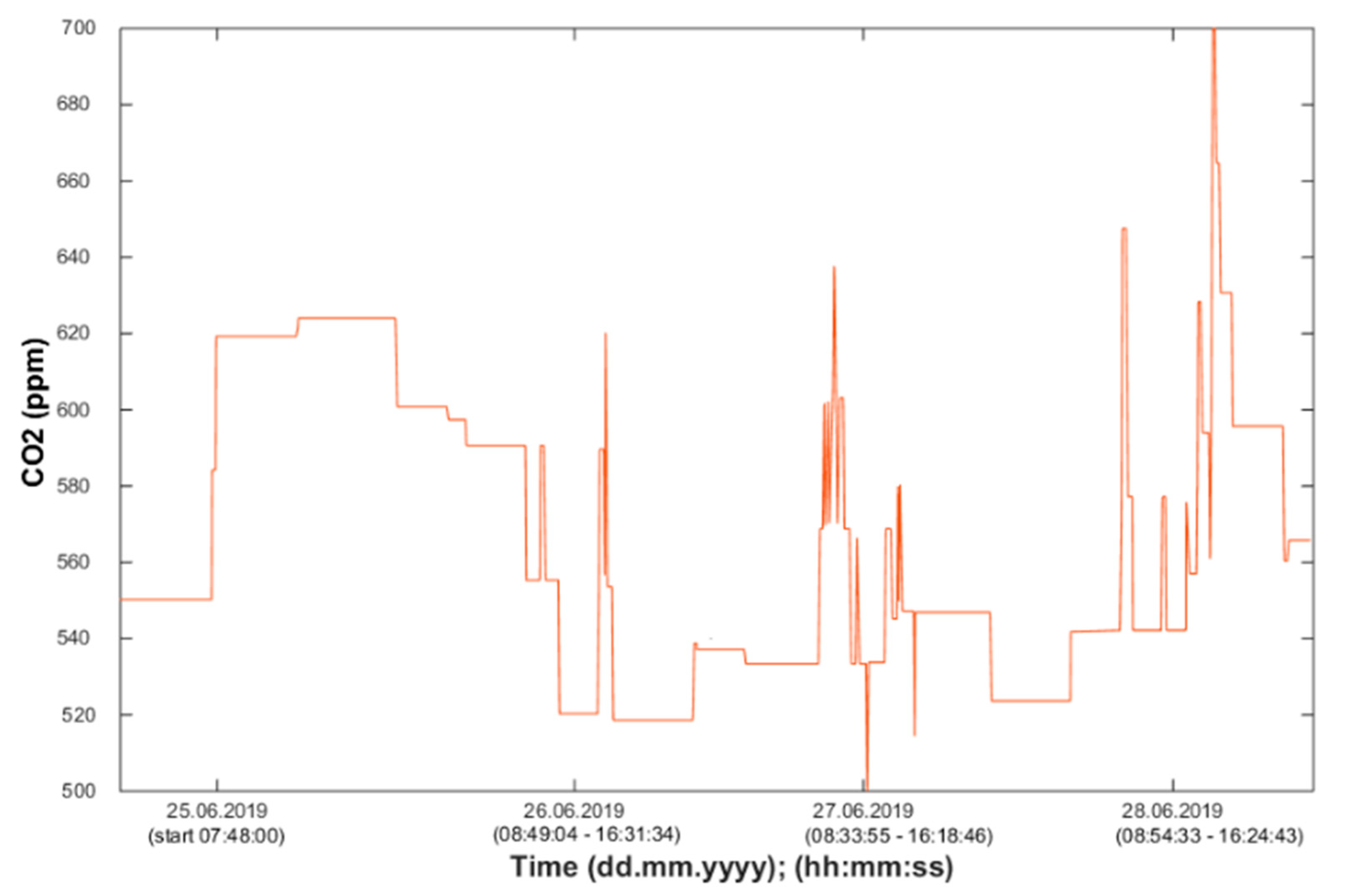
Figure 15.
Waveforms of the CO2 concentration values measured in SH room R203 (BT 12.10).
Figure 15.
Waveforms of the CO2 concentration values measured in SH room R203 (BT 12.10).
Figure 16.
Waveforms of the CO2 concentration values measured in SH room R204 (BT 12.11).
Figure 16.
Waveforms of the CO2 concentration values measured in SH room R204 (BT 12.11).
Figure 17.
The waveform of the experiments performed on 26 June 2018, 27 June 2018, and 28 June 2018 for rooms R104, R203 and R204.
Figure 17.
The waveform of the experiments performed on 26 June 2018, 27 June 2018, and 28 June 2018 for rooms R104, R203 and R204.
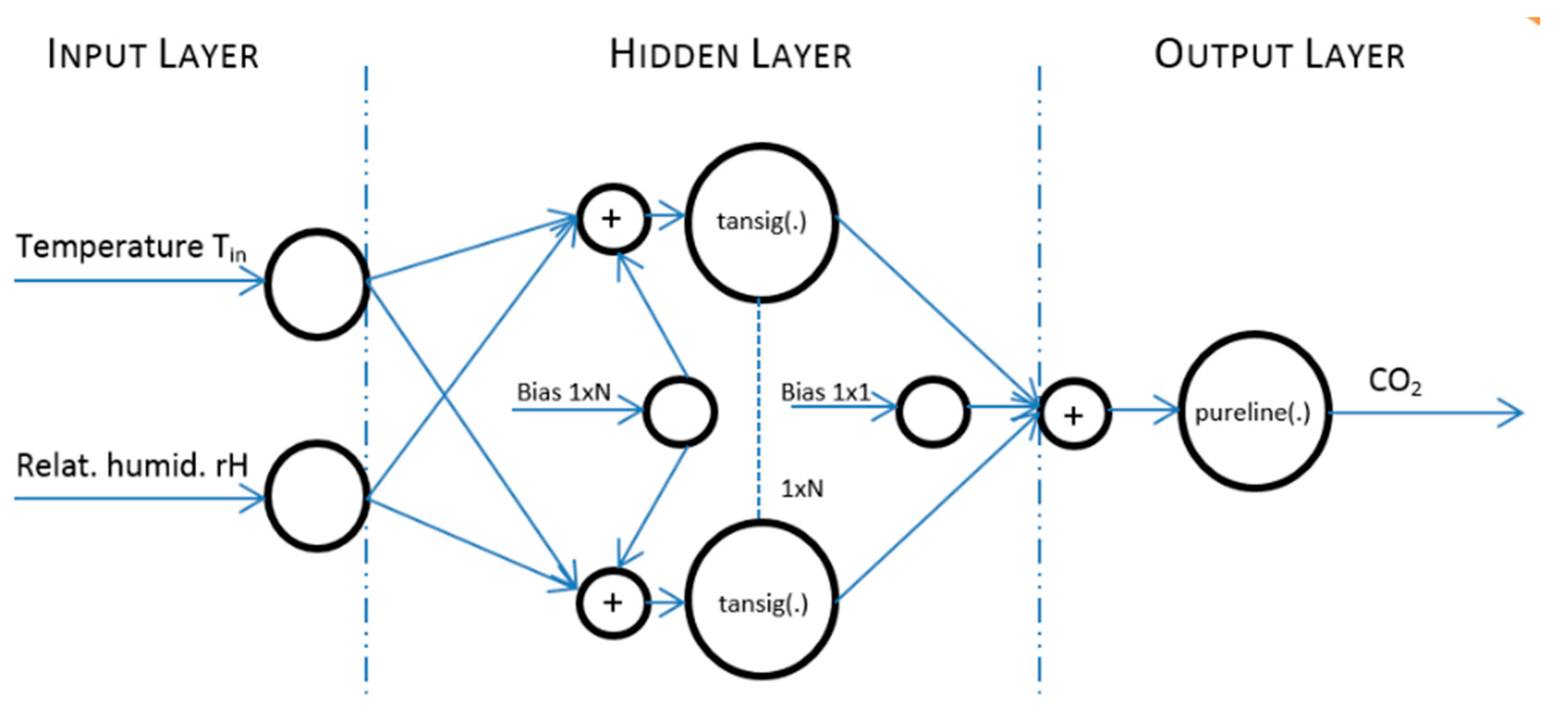
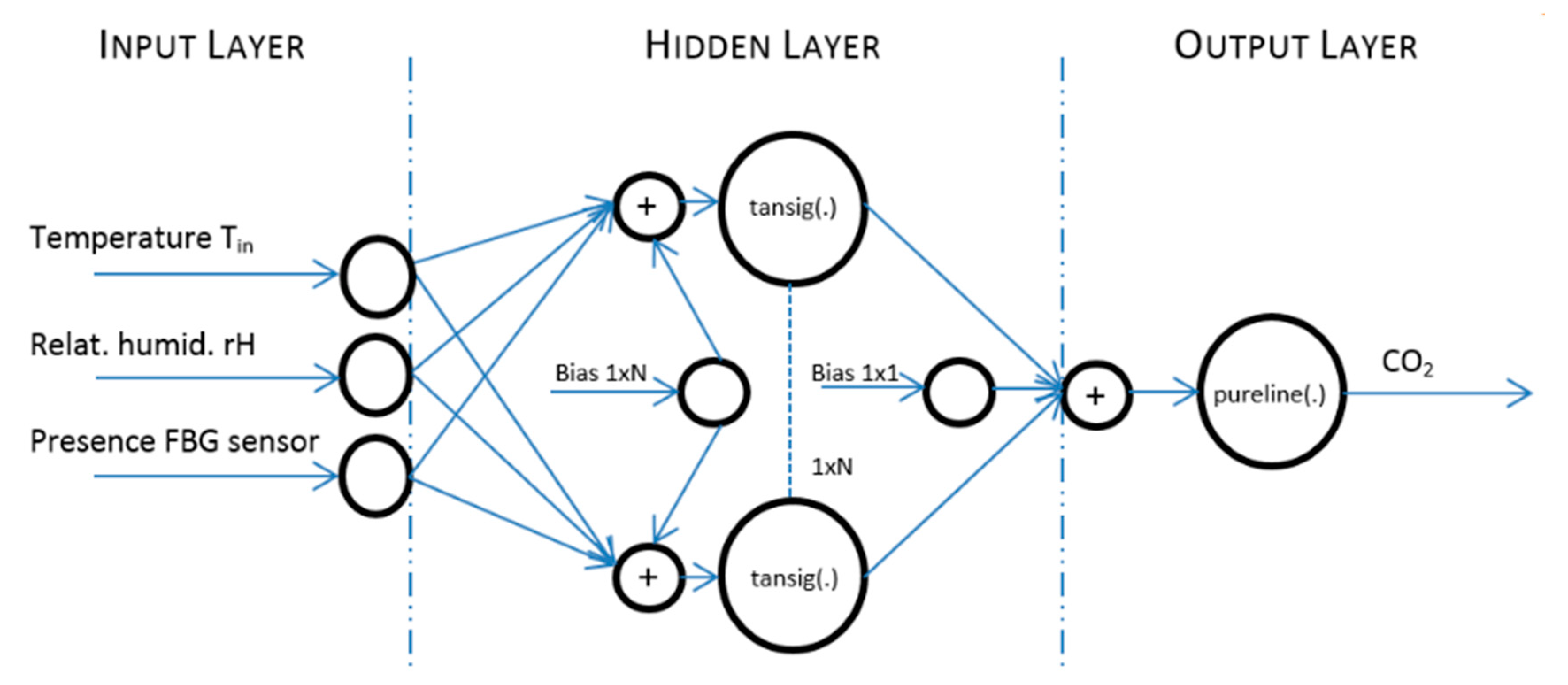
Figure 18.
The architecture of the designed ANN SCG on test data measured in R203 from 25 June 2018 for two inputs Tin and rHin without and FBG sensor for person presence measuring (PPM).
Figure 18.
The architecture of the designed ANN SCG on test data measured in R203 from 25 June 2018 for two inputs Tin and rHin without and FBG sensor for person presence measuring (PPM).
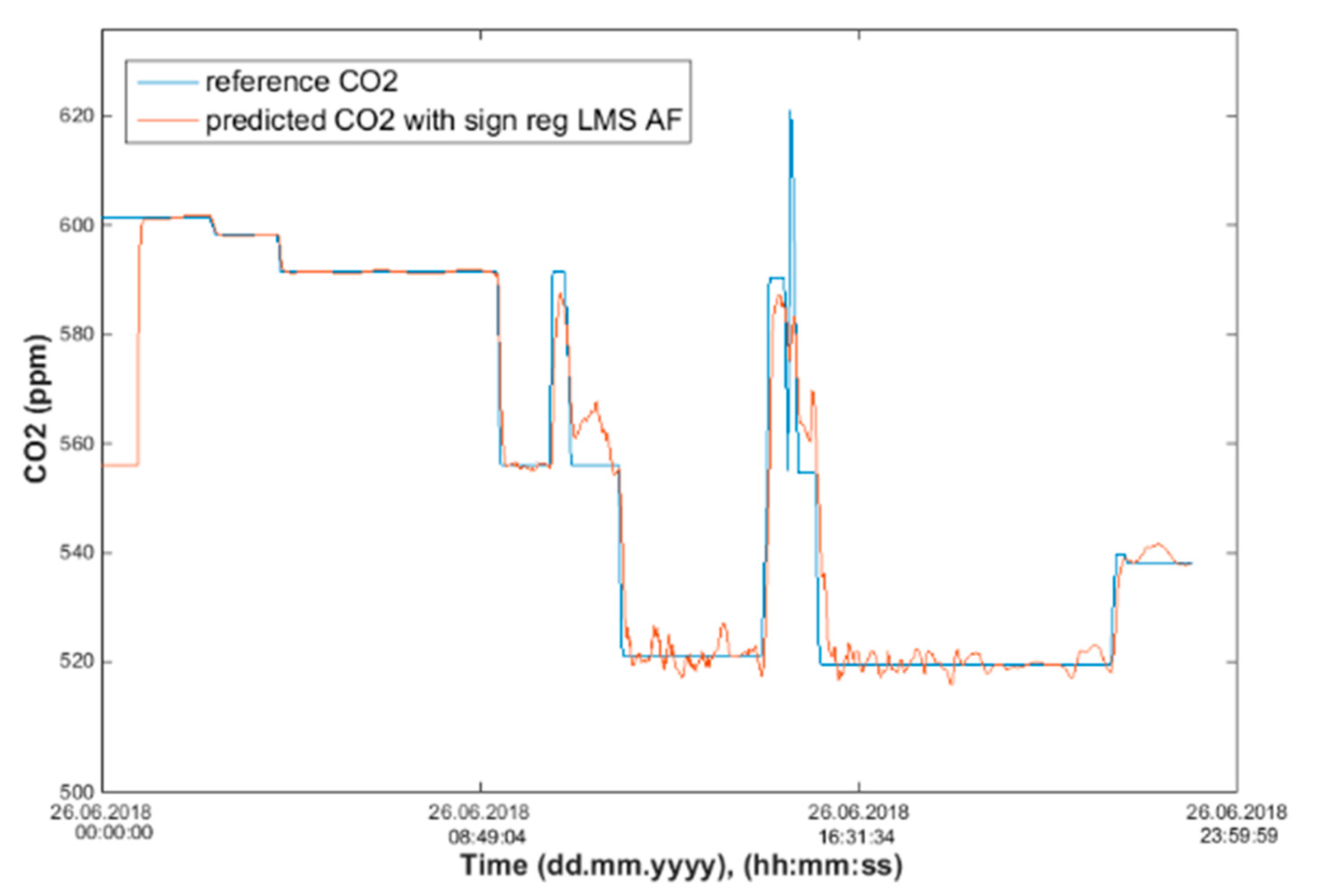
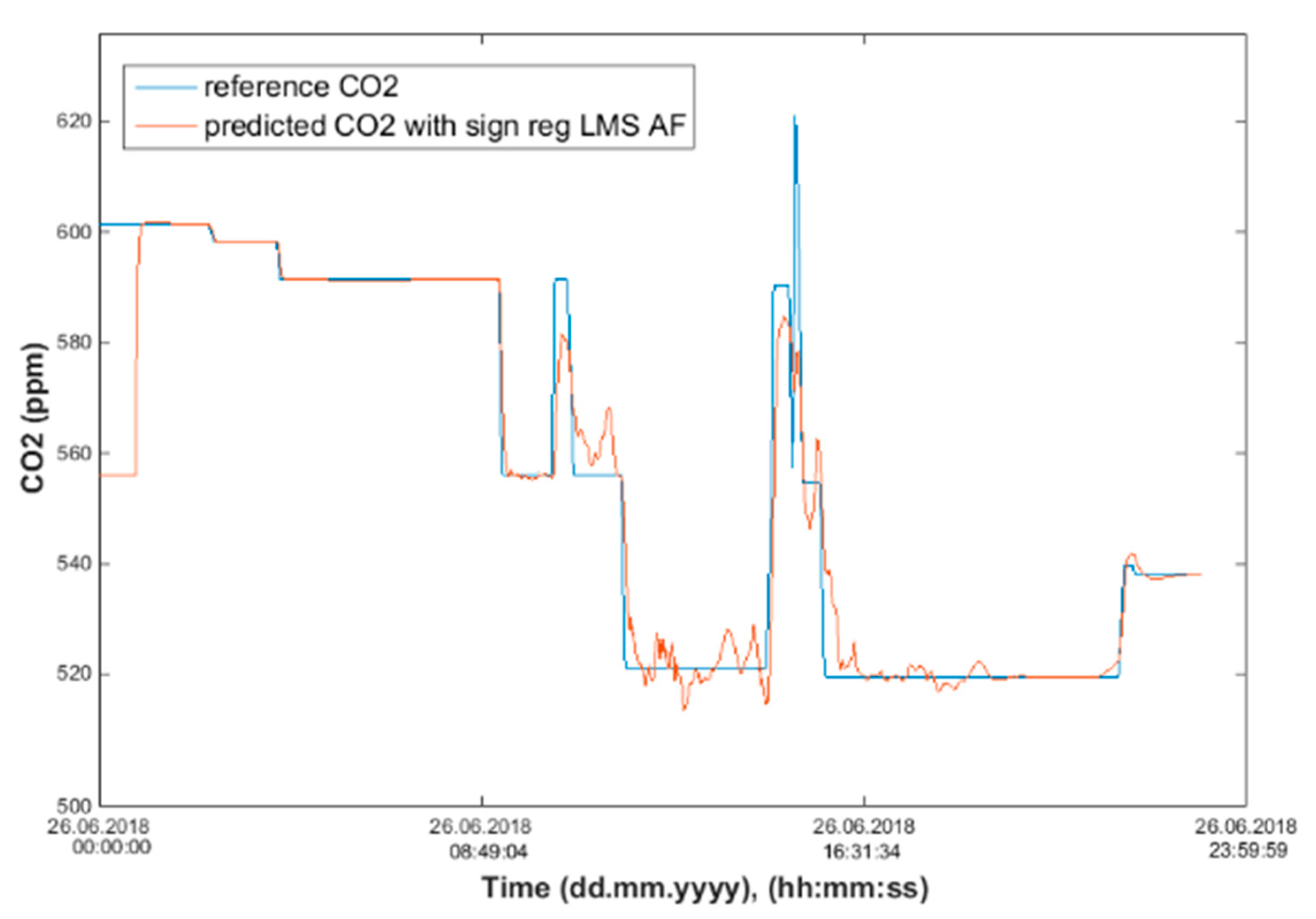
Figure 19.
Comparison of the reference CO2 concentration waveform and predicted CO2 waveforms (SRLMS AF) from 26 June 2018 in R203 with an ANN with 100 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 19.
Comparison of the reference CO2 concentration waveform and predicted CO2 waveforms (SRLMS AF) from 26 June 2018 in R203 with an ANN with 100 neurons and SCG method trained with data from 25 June 2018 in R203.
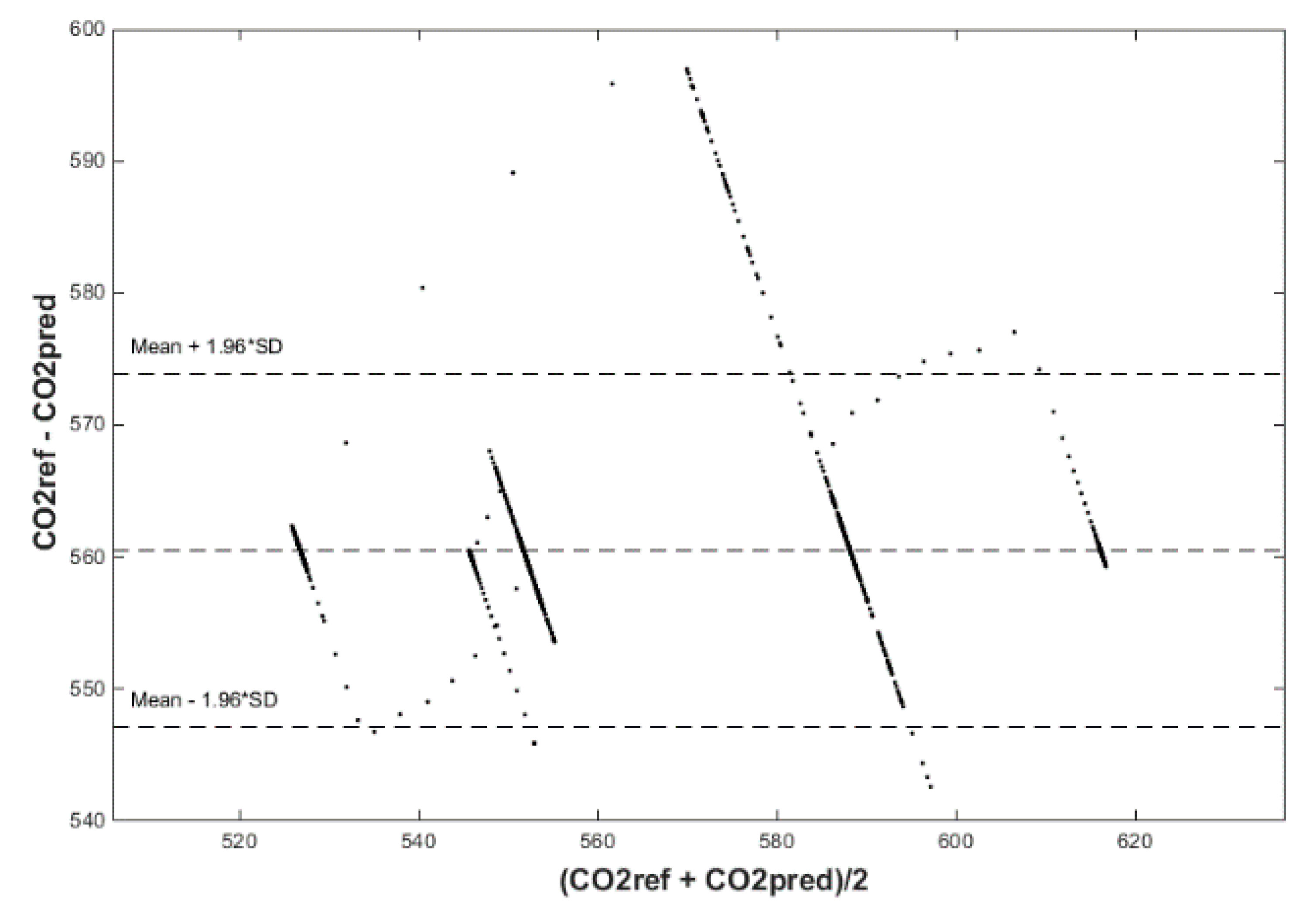
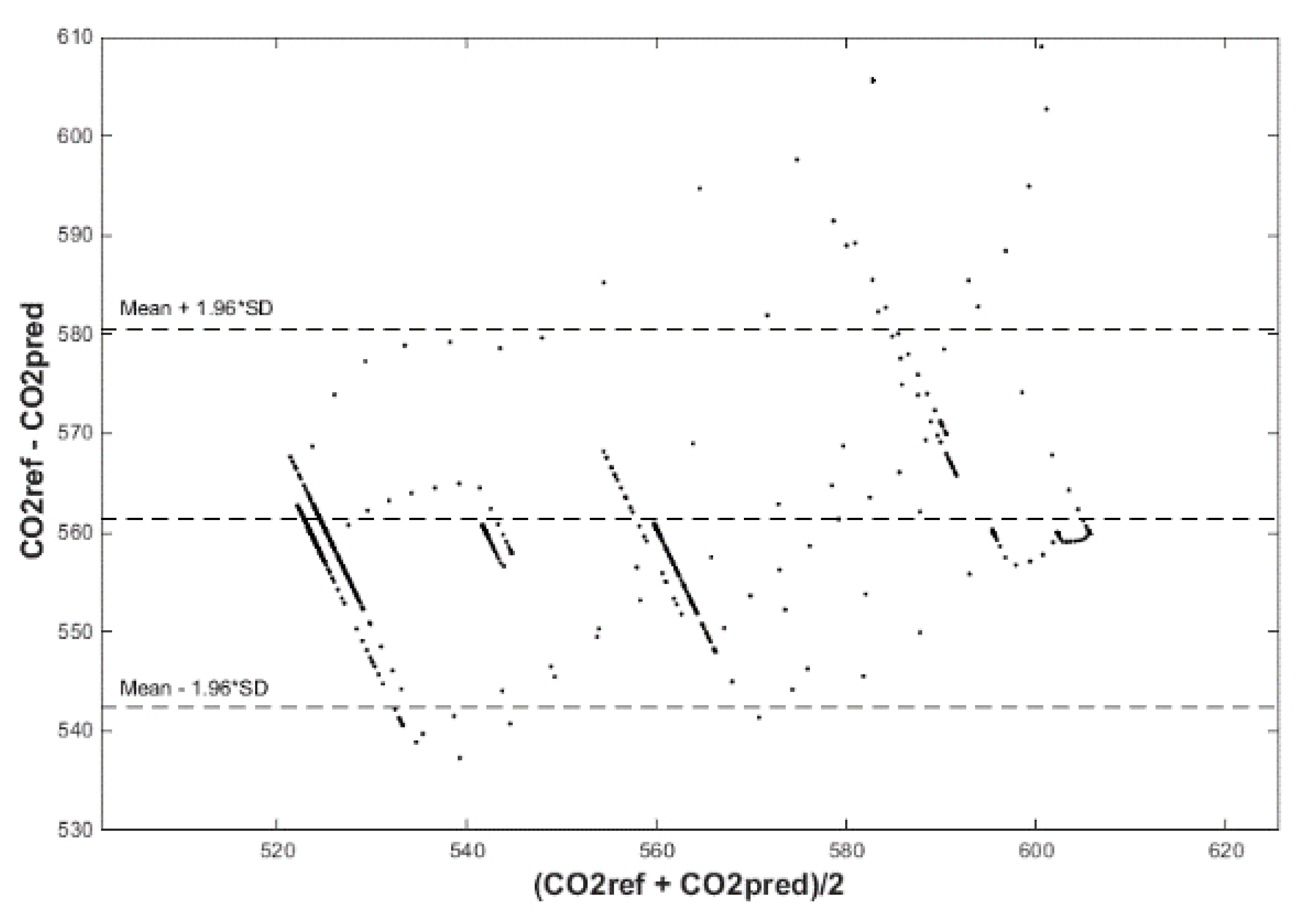
Figure 20.
Bland–Altman plot for the reference and predicted CO2 waveforms (SRLMS AF) from 26 June 2018 in R203 with an ANN with 100 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 20.
Bland–Altman plot for the reference and predicted CO2 waveforms (SRLMS AF) from 26 June 2018 in R203 with an ANN with 100 neurons and SCG method trained with data from 25 June 2018 in R203.
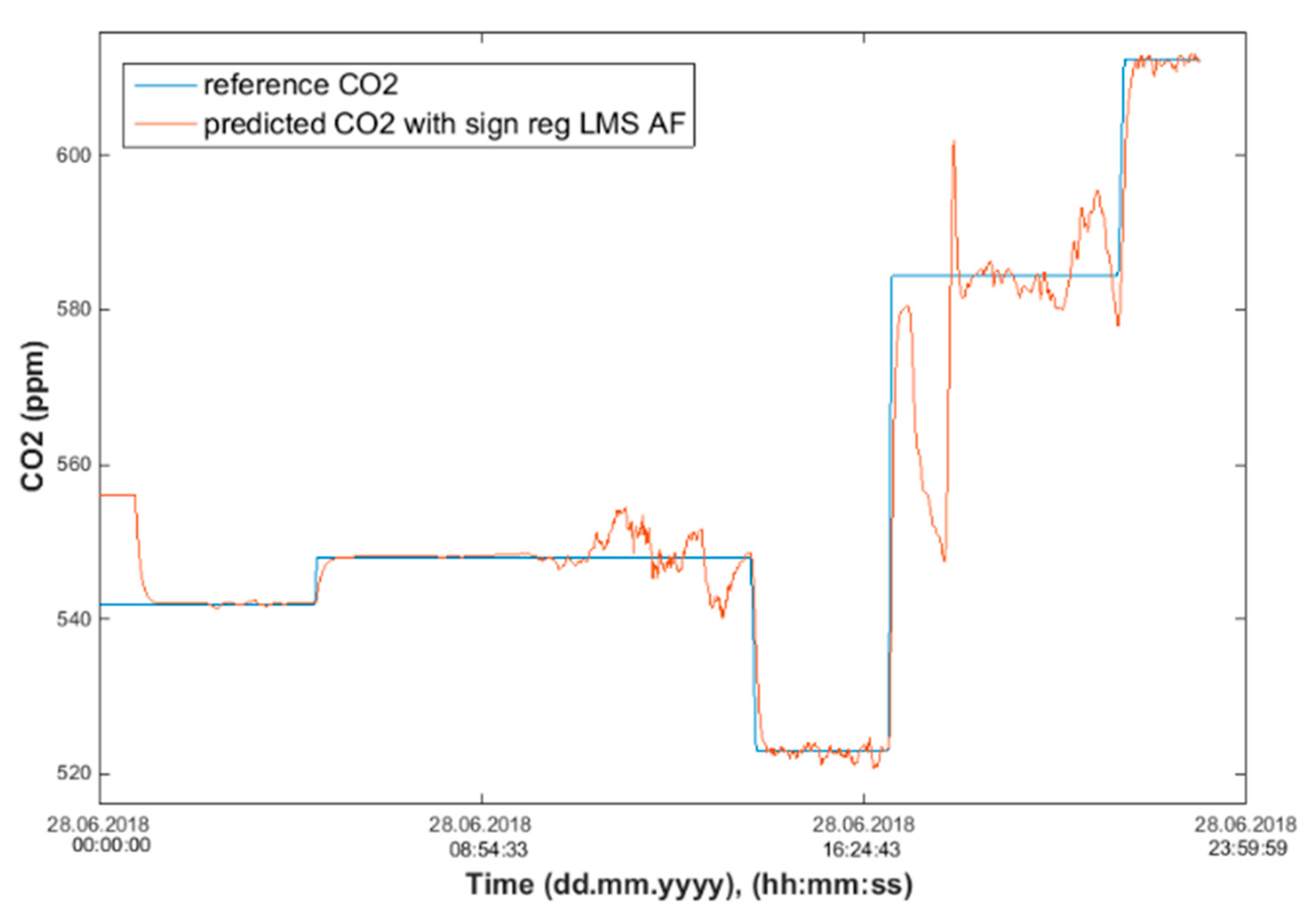
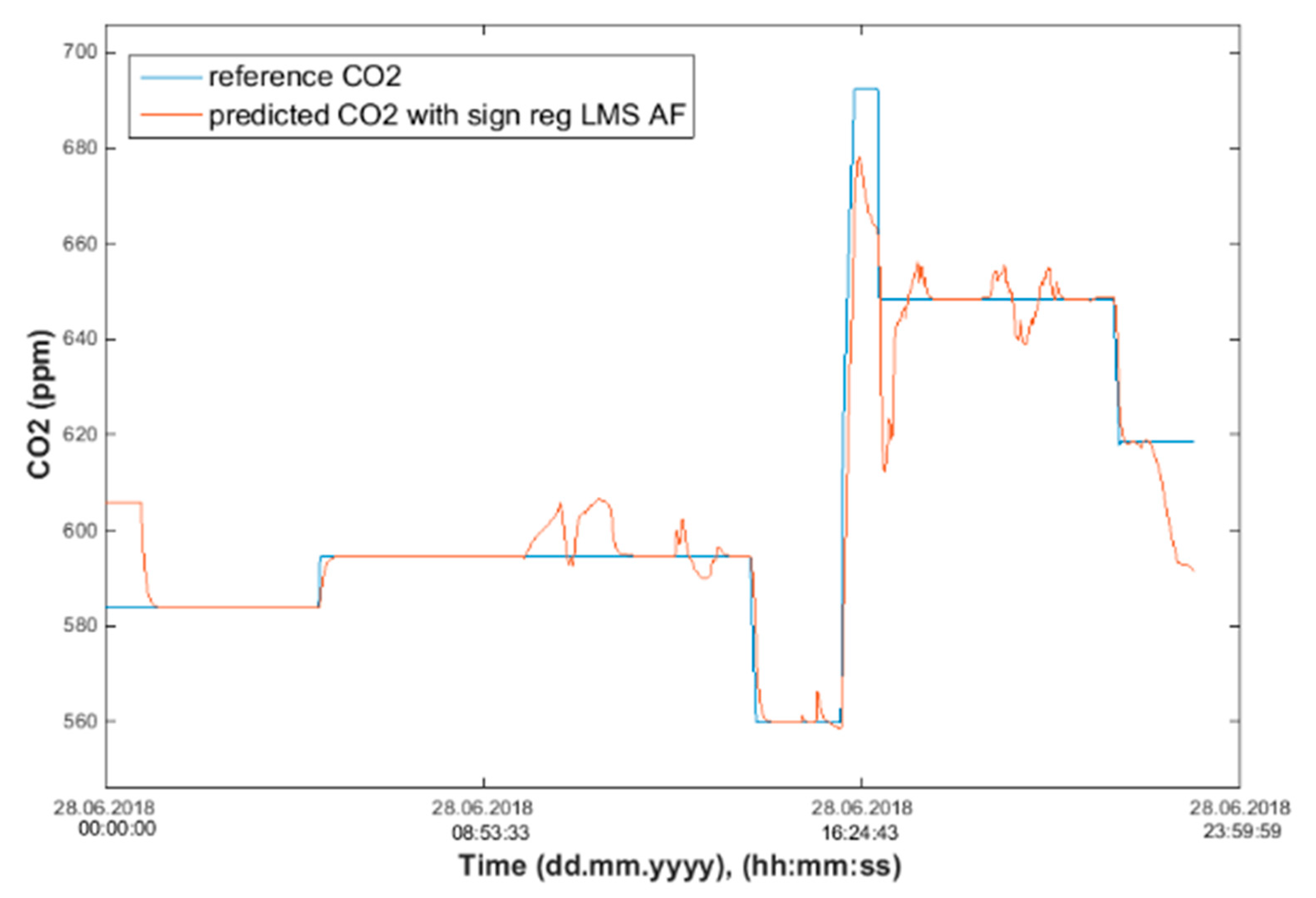
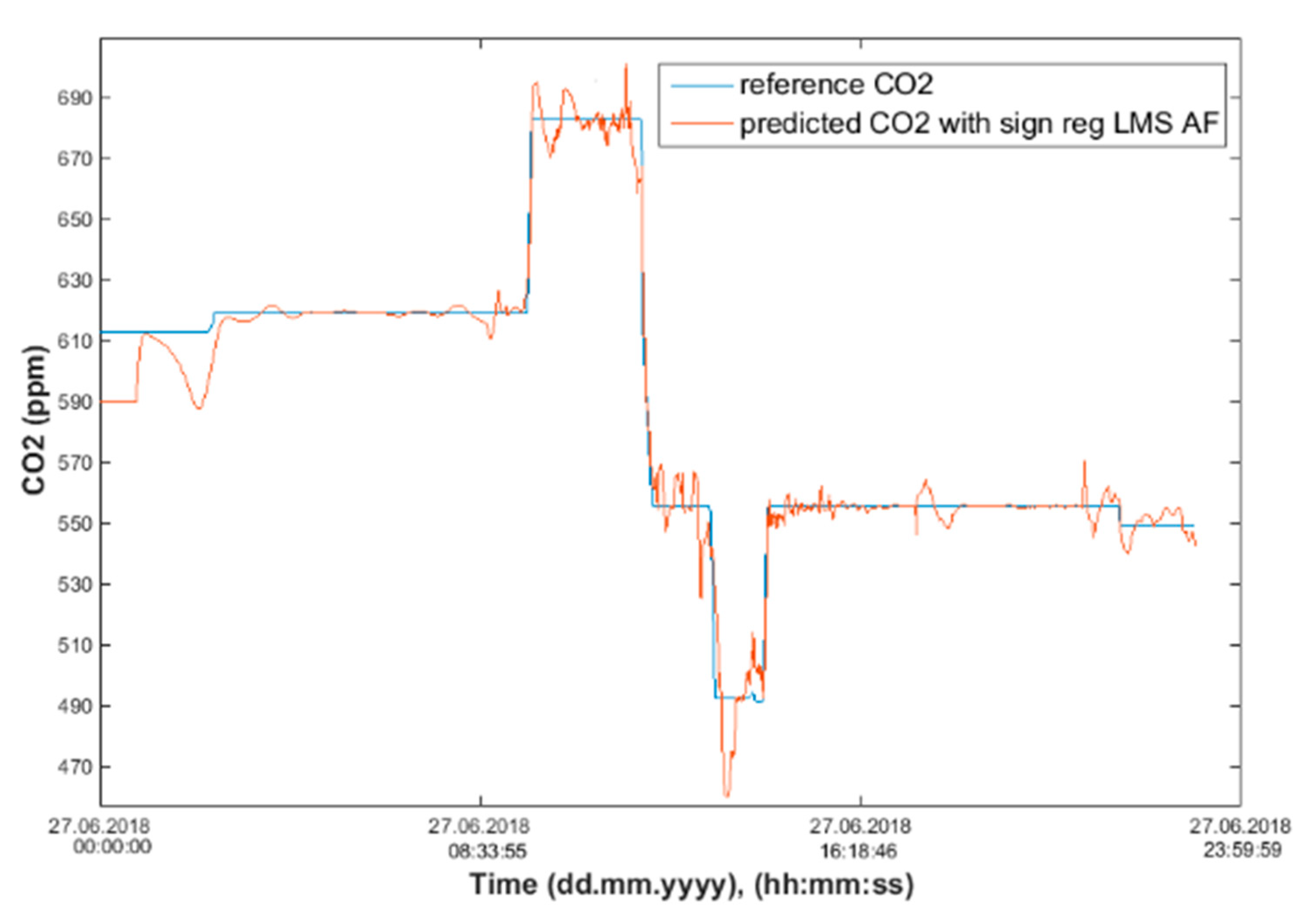
Figure 21.
Comparison of the reference and predicted CO2 waveforms (SRLMS AF) from 28 June 2018 in R204 with an ANN with 40 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 21.
Comparison of the reference and predicted CO2 waveforms (SRLMS AF) from 28 June 2018 in R204 with an ANN with 40 neurons and SCG method trained with data from 25 June 2018 in R203.
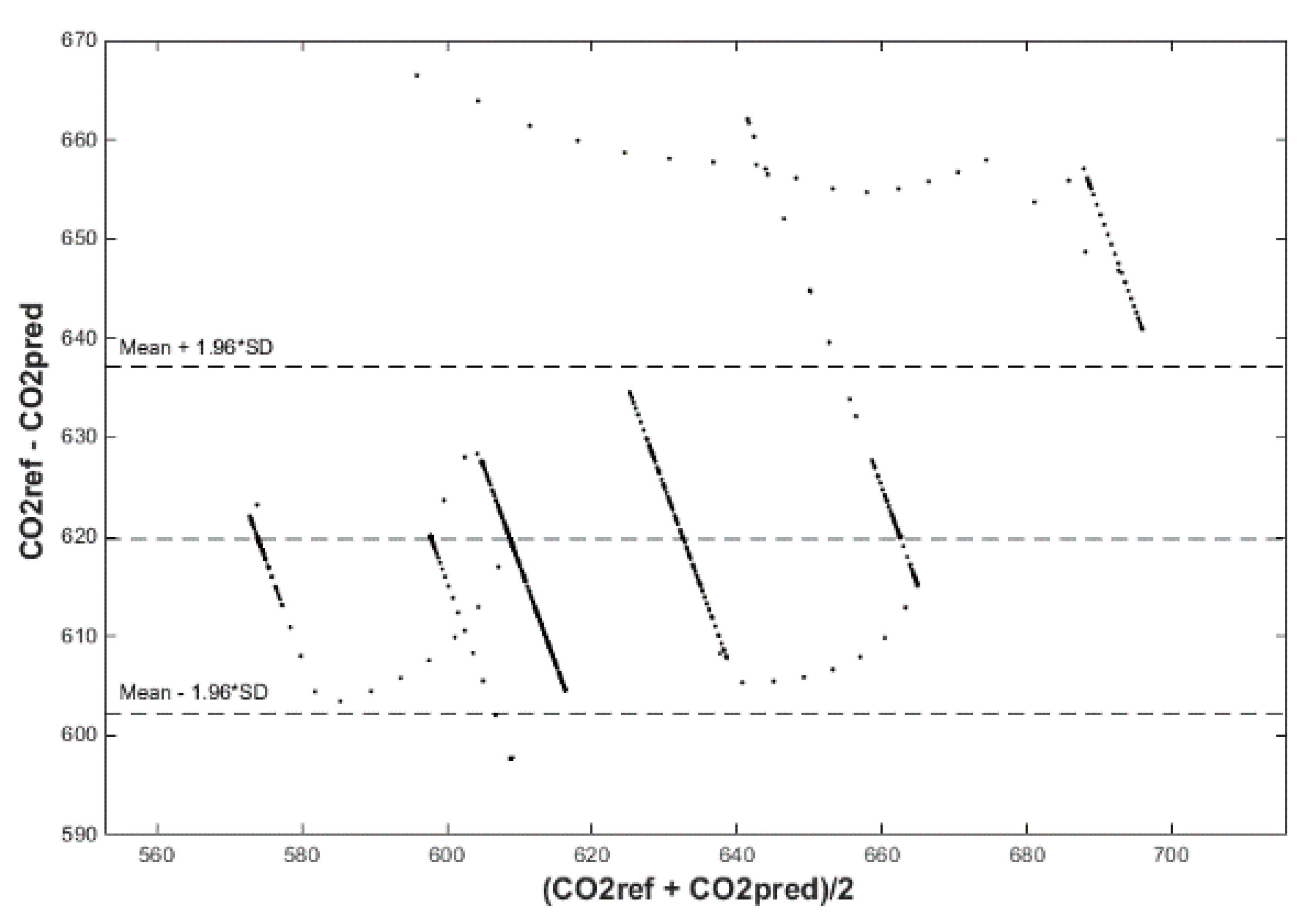
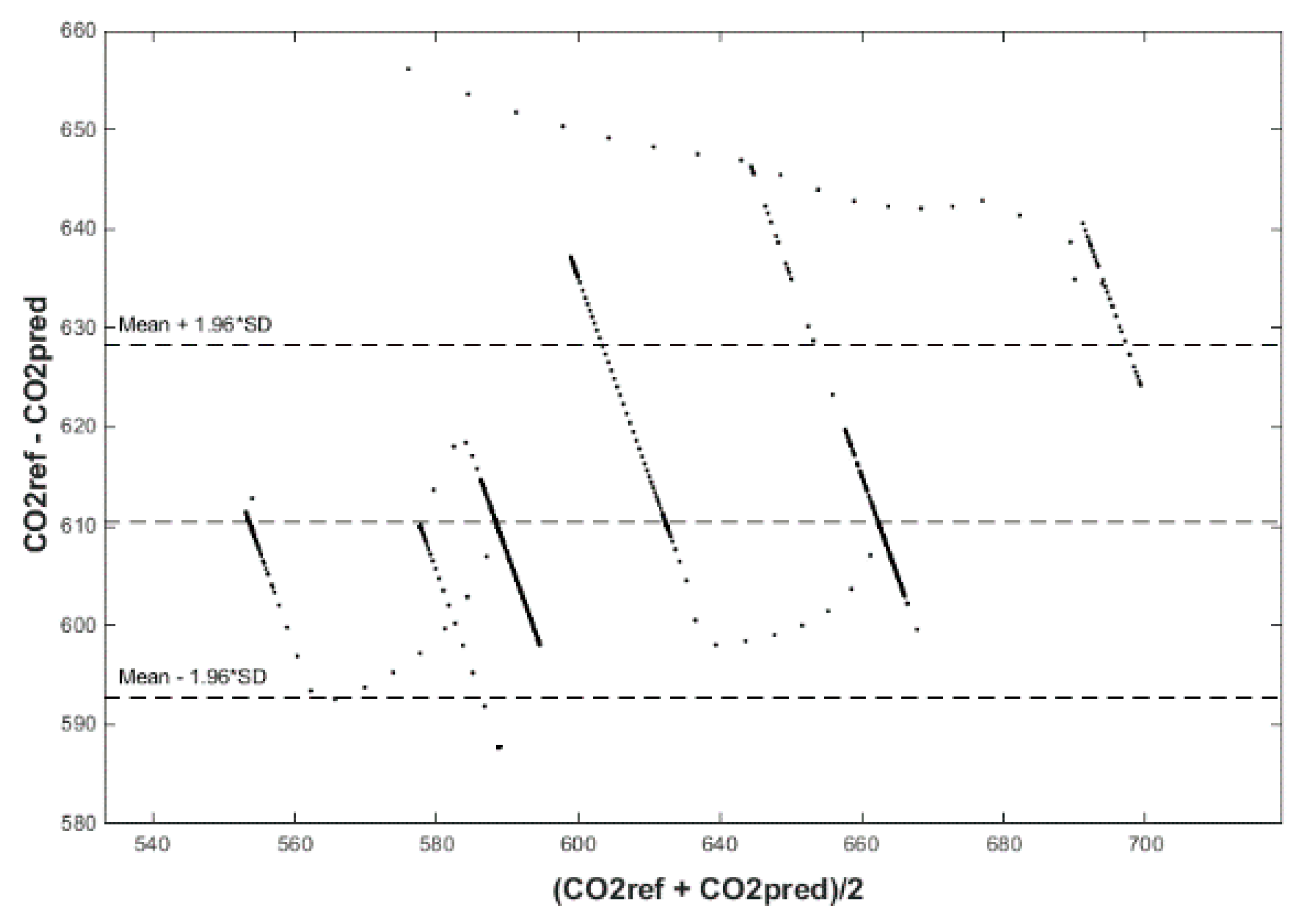
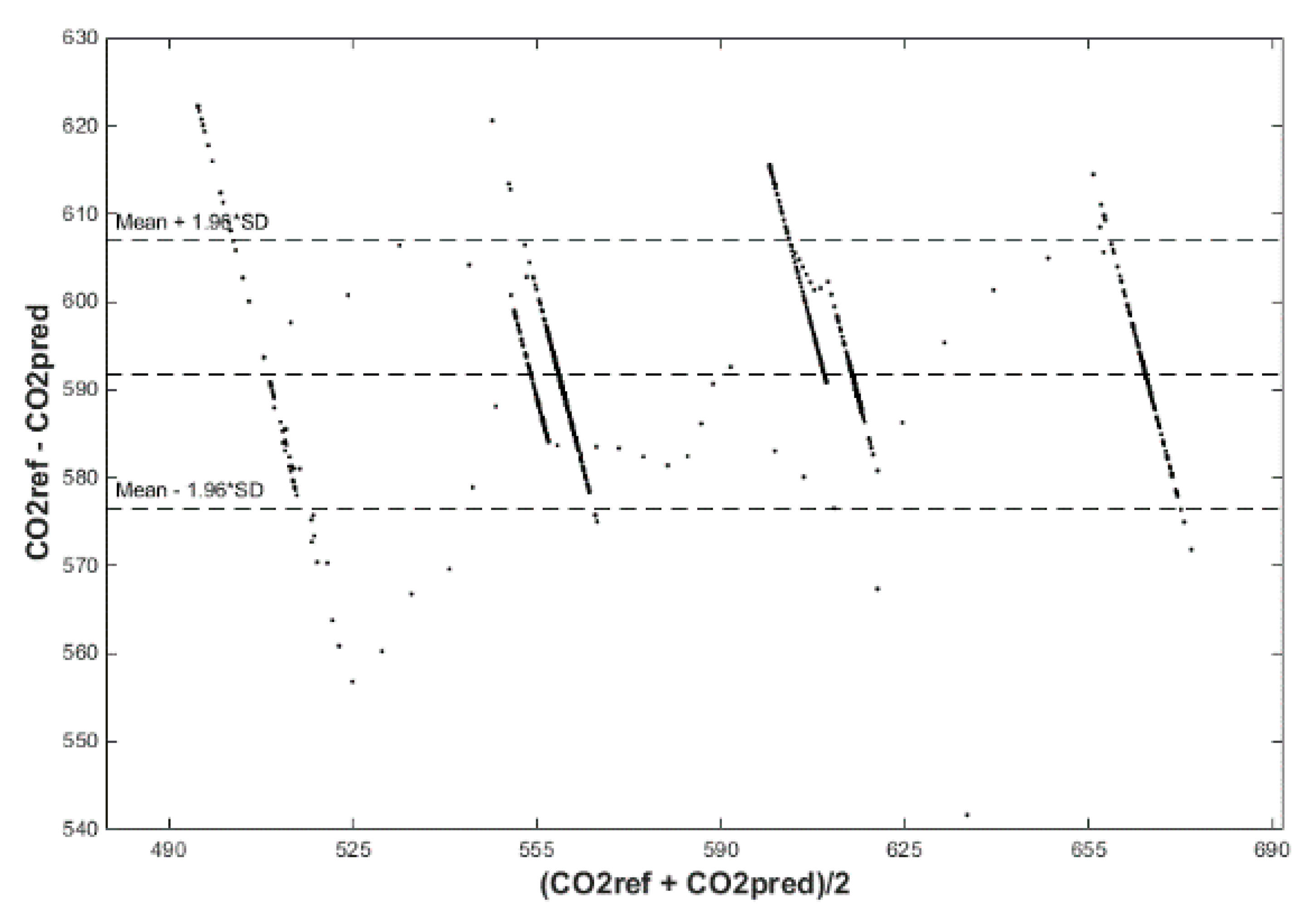
Figure 22.
Bland–Altman plot for the reference and predicted CO2 waveforms (SRLMS AF) from 28 June 2018 in R204 with an ANN with 40 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 22.
Bland–Altman plot for the reference and predicted CO2 waveforms (SRLMS AF) from 28 June 2018 in R204 with an ANN with 40 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 23.
Comparison of the reference and predicted CO2 waveforms (SRLMS AF) from 28 June 2018 in R104 with an ANN with 60 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 23.
Comparison of the reference and predicted CO2 waveforms (SRLMS AF) from 28 June 2018 in R104 with an ANN with 60 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 24.
Bland–Altman plot for the reference and predicted CO2 waveforms (SRLMS AF) from 28 June 2018 in R104 with an ANN with 60 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 24.
Bland–Altman plot for the reference and predicted CO2 waveforms (SRLMS AF) from 28 June 2018 in R104 with an ANN with 60 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 25.
The architecture of designed ANN SCG on test data measured in R203 from 25 June 2018 for three inputs Tin, rHin and those of an FBG sensor for PPM.
Figure 25.
The architecture of designed ANN SCG on test data measured in R203 from 25 June 2018 for three inputs Tin, rHin and those of an FBG sensor for PPM.
Figure 26.
Comparison of the reference and predicted CO2 waveforms (SRLMS AF) from 26 June 2018 in R203 with an ANN with 60 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 26.
Comparison of the reference and predicted CO2 waveforms (SRLMS AF) from 26 June 2018 in R203 with an ANN with 60 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 27.
Bland–Altman for the reference and predicted CO2 waveforms (SRLMS AF) from 26 June 2018 in R203 with an ANN with 60 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 27.
Bland–Altman for the reference and predicted CO2 waveforms (SRLMS AF) from 26 June 2018 in R203 with an ANN with 60 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 28.
Comparison of the reference and predicted CO2 waveforms (SRLMS AF) from 28 June 2018 in R204 with an ANN with 90 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 28.
Comparison of the reference and predicted CO2 waveforms (SRLMS AF) from 28 June 2018 in R204 with an ANN with 90 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 29.
Bland–Altman for the reference and predicted CO2 waveforms (SRLMS AF) from 28 June 2018 in R204 with an ANN with 90 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 29.
Bland–Altman for the reference and predicted CO2 waveforms (SRLMS AF) from 28 June 2018 in R204 with an ANN with 90 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 30.
Comparison of the reference and predicted CO2 waveforms (SRLMS AF) from 27 June 2018 in R104 with an ANN with 60 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 30.
Comparison of the reference and predicted CO2 waveforms (SRLMS AF) from 27 June 2018 in R104 with an ANN with 60 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 31.
Bland–Altman for the reference and predicted CO2 waveforms (SRLMS AF) from 27 June 2018 in R104 with an ANN with 60 neurons and SCG method trained with data from 25 June 2018 in R203.
Figure 31.
Bland–Altman for the reference and predicted CO2 waveforms (SRLMS AF) from 27 June 2018 in R104 with an ANN with 60 neurons and SCG method trained with data from 25 June 2018 in R203.
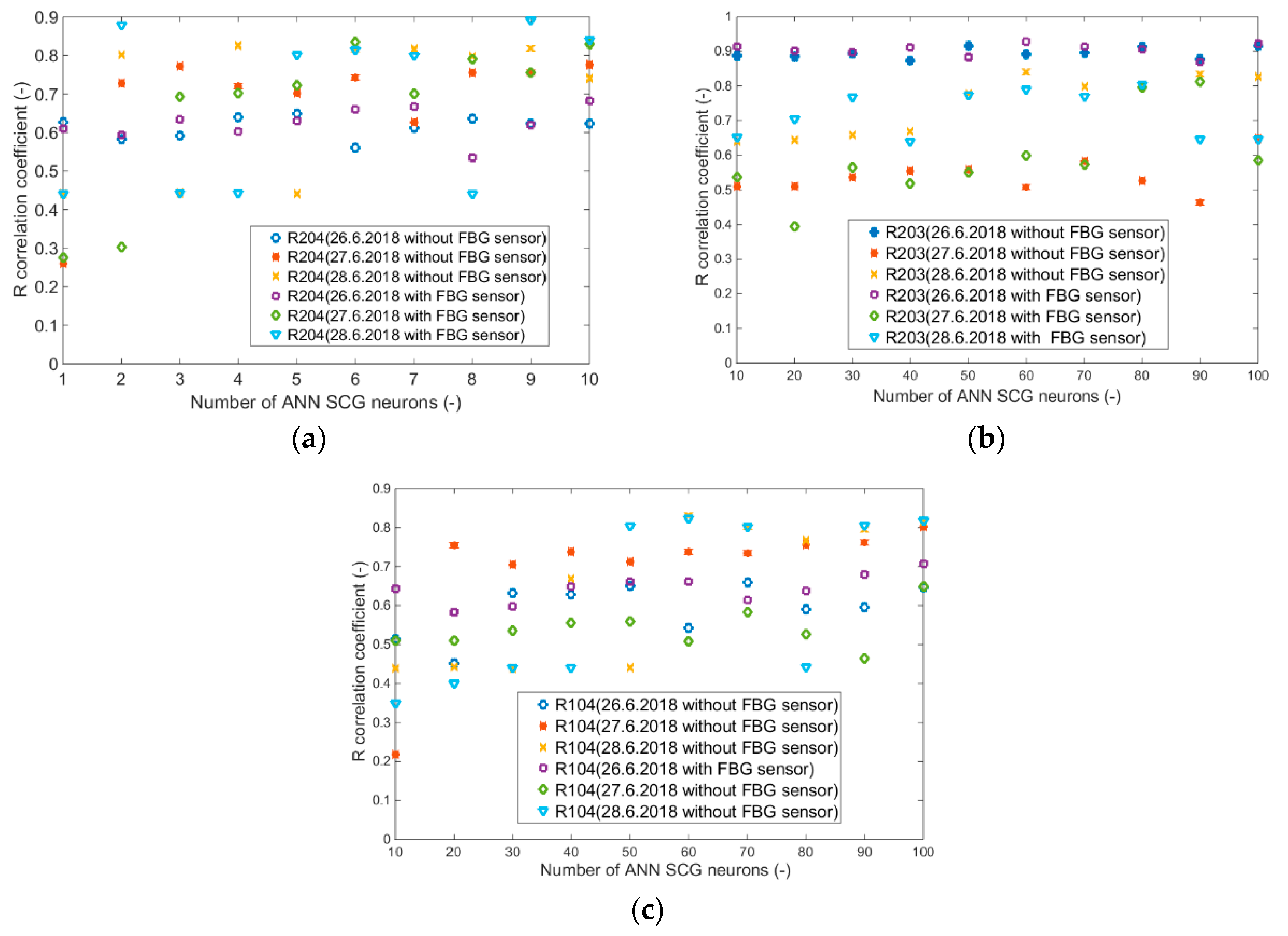
Figure 32.
R-correlation coefficients for (a) room R203 with and without FBG, (b) room R204 with and without FBG, (c) room R104 with and without FBG.
Figure 32.
R-correlation coefficients for (a) room R203 with and without FBG, (b) room R204 with and without FBG, (c) room R104 with and without FBG.
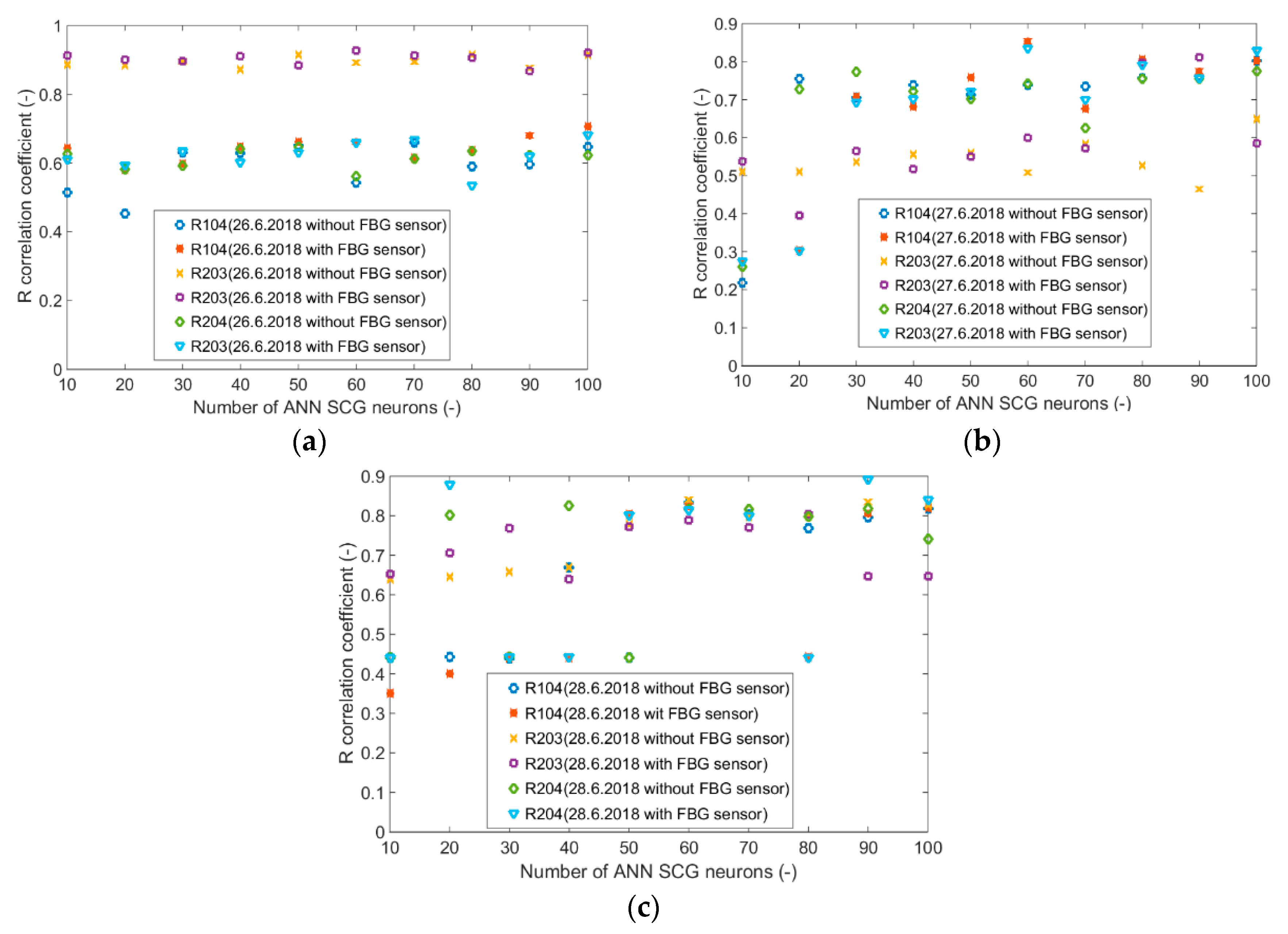
Figure 33.
R-correlation coefficients for rooms R104, R203, R204 with and without FBG (a) 26 June 2018, (b) 27 June 2018, (c) 28 June 2018.
Figure 33.
R-correlation coefficients for rooms R104, R203, R204 with and without FBG (a) 26 June 2018, (b) 27 June 2018, (c) 28 June 2018.
Table 1.
Unambiguous determination of the number of occupants on the staircase in room R104 in the SH.
Table 1.
Unambiguous determination of the number of occupants on the staircase in room R104 in the SH.
| Date | Time | Number of Occupants | Date | Time | Number of Occupants | Date | Time | Number of Occupants |
|---|
| (dd.mm.yyyy) | (hh:mm:ss) | | (dd.mm.yyyy) | (hh:mm:ss) | | (dd.mm.yyyy) | (hh:mm:ss) | |
|---|
| 25 June 2018 | 7:48:07 | 1 | 27 June 2018 | 9:40:24 | 2 | 27 June 2018 | 14:52:53 | 2 |
| 25 June 2018 | 7:53:11 | 1 | 27 June 2018 | 9:44:09 | 3 | 27 June 2018 | 14:53:13 | 3 |
| 25 June 2018 | 7:53:13 | 2 | 27 June 2018 | 9:47:55 | 2 | 27 June 2018 | 14:56:13 | 2 |
| 25 June 2018 | 7:53:23 | 1 | 27 June 2018 | 9:51:23 | 1 | 27 June 2018 | 14:56:49 | 3 |
| 26 June 2018 | 8:49:04 | 1 | 27 June 2018 | 9:52:31 | 2 | 27 June 2018 | 15:01:32 | 2 |
| 26 June 2018 | 8:59:39 | 1 | 27 June 2018 | 10:04:16 | 3 | 27 June 2018 | 15:02:11 | 3 |
| 26 June 2018 | 9:21:15 | 1 | 27 June 2018 | 10:06:44 | 2 | 27 June 2018 | 15:12:12 | 2 |
| 26 June 2018 | 9:55:43 | 2 | 27 June 2018 | 10:08:47 | 1 | 27 June 2018 | 15:13:37 | 2 |
| 26 June 2018 | 10:29:44 | 1 | 27 June 2018 | 10:09:10 | 2 | 27 June 2018 | 15:13:41 | 3 |
| 26 June 2018 | 10:54:16 | 1 | 27 June 2018 | 10:21:31 | 1 | 27 June 2018 | 15:14:28 | 2 |
| 26 June 2018 | 11:49:18 | 1 | 27 June 2018 | 11:25:30 | 2 | 27 June 2018 | 15:14:50 | 3 |
| 26 June 2018 | 12:34:02 | 2 | 27 June 2018 | 11:29:22 | 3 | 27 June 2018 | 15:15:49 | 2 |
| 26 June 2018 | 12:35:40 | 1 | 27 June 2018 | 11:33:34 | 2 | 27 June 2018 | 15:22:19 | 3 |
| 26 June 2018 | 14:38:27 | 2 | 27 June 2018 | 11:36:08 | 1 | 27 June 2018 | 15:23:10 | 2 |
| 26 June 2018 | 15:24:31 | 1 | 27 June 2018 | 11:36:48 | 0 | 27 June 2018 | 16:18:22 | 1 |
| 26 June 2018 | 15:24:52 | 2 | 27 June 2018 | 12:28:48 | 1 | 27 June 2018 | 16:18:46 | 0 |
| 26 June 2018 | 16:07:57 | 1 | 27 June 2018 | 12:28:57 | 2 | 28 June 2018 | 8:54:33 | 1 |
| 26 June 2018 | 16:08:25 | 2 | 27 June 2018 | 12:53:14 | 1 | 28 June 2018 | 8:54:35 | 2 |
| 26 June 2018 | 16:31:34 | 1 | 27 June 2018 | 13:03:53 | 2 | 28 June 2018 | 9:22:11 | 1 |
| 27 June 2018 | 8:33:55 | 1 | 27 June 2018 | 14:25:57 | 1 | 28 June 2018 | 10:19:19 | 1 |
| 27 June 2018 | 8:35:22 | 2 | 27 June 2018 | 14:26:27 | 2 | 28 June 2018 | 10:20:05 | 2 |
| 27 June 2018 | 9:07:51 | 1 | 27 June 2018 | 14:29:00 | 3 | 28 June 2018 | 10:59:54 | 1 |
| 27 June 2018 | 9:09:36 | 2 | 27 June 2018 | 14:30:04 | 2 | 28 June 2018 | 11:00:07 | 2 |
| 27 June 2018 | 9:26:26 | 1 | 27 June 2018 | 14:33:03 | 1 | 28 June 2018 | 12:23:23 | 1 |
| 27 June 2018 | 9:30:32 | 2 | 27 June 2018 | 14:44:50 | 2 | 28 June 2018 | 12:45:23 | 2 |
| 27 June 2018 | 9:34:57 | 1 | 27 June 2018 | 14:45:09 | 1 | 28 June 2018 | 15:01:41 | 1 |
| 27 June 2018 | 9:35:50 | 2 | 27 June 2018 | 14:46:08 | 2 | 28 June 2018 | 15:01:57 | 2 |
| 27 June 2018 | 9:39:48 | 1 | 27 June 2018 | 14:51:29 | 3 | 28 June 2018 | 16:22:41 | 1 |
Table 2.
Learned ANN SCG from 25 June 2018 in R203 (with Tin and rHin) and prediction with cross-validation for 26 June 2018 in R203 (with Tin and rHin), 27 June 2018 in R203 (with Tin and rHin), 28 June 2018 in R203 (with Tin and rHin).
Table 2.
Learned ANN SCG from 25 June 2018 in R203 (with Tin and rHin) and prediction with cross-validation for 26 June 2018 in R203 (with Tin and rHin), 27 June 2018 in R203 (with Tin and rHin), 28 June 2018 in R203 (with Tin and rHin).
| | 26 June 2018 in R203 | 27 June 2018 in R203 | 28 June 2018 in R203 |
|---|
| Number of Neurons ANN SCG | MSE | R | MAPE | MSE | R | MAPE | MSE | R | MAPE |
|---|
| (-) | (-) | (-) | (-) | (-) | (-) | (-) | (-) | (-) |
|---|
| 10 | 0.0062 | 0.8867 | 0.2858 | 0.006 | 0.5094 | 0.198 | 0.0206 | 0.6398 | 0.3275 |
| 20 | 0.0063 | 0.8846 | 0.289 | 0.006 | 0.5098 | 0.1992 | 0.0204 | 0.6449 | 0.3238 |
| 30 | 0.0058 | 0.8943 | 0.2872 | 0.0058 | 0.5355 | 0.1794 | 0.0198 | 0.6586 | 0.3265 |
| 40 | 0.0071 | 0.8728 | 0.3237 | 0.0056 | 0.5555 | 0.2036 | 0.0193 | 0.6687 | 0.3186 |
| 50 | 0.0047 | 0.9151 | 0.2171 | 0.0056 | 0.5591 | 0.1633 | 0.0138 | 0.7784 | 0.212 |
| 60 | 0.006 | 0.8918 | 0.3298 | 0.0061 | 0.5084 | 0.1906 | 0.0103 | 0.8401 | 0.1818 |
| 70 | 0.0059 | 0.8957 | 0.3025 | 0.0054 | 0.5824 | 0.1861 | 0.0127 | 0.7983 | 0.2091 |
| 80 | 0.0048 | 0.9145 | 0.2475 | 0.0059 | 0.5261 | 0.1845 | 0.0127 | 0.7988 | 0.2558 |
| 90 | 0.0069 | 0.877 | 0.1623 | 0.0065 | 0.4645 | 0.2097 | 0.0106 | 0.8346 | 0.2221 |
| 100 | 0.0047 | 0.916 | 0.2559 | 0.0047 | 0.6489 | 0.1614 | 0.0111 | 0.8266 | 0.1884 |
Table 3.
Learned ANN SCG from 25 June 2018 in R203 (with Tin and rHin) and prediction with cross-validation for 26 June 2018 in R204 (with Tin and rHin), 27 June 2018 in R204 (with Tin and rHin), and 28 June 2018 in R204 (with Tin and rHin).
Table 3.
Learned ANN SCG from 25 June 2018 in R203 (with Tin and rHin) and prediction with cross-validation for 26 June 2018 in R204 (with Tin and rHin), 27 June 2018 in R204 (with Tin and rHin), and 28 June 2018 in R204 (with Tin and rHin).
| | 26 June 2018 in R204 | 27 June 2018 in R204 | 28 June 2018 in R204 |
|---|
| Number of Neurons ANN SCG | MSE | R | MAPE | MSE | R | MAPE | MSE | R | MAPE |
|---|
| (-) | (-) | (-) | (-) | (-) | (-) | (-) | (-) | (-) |
|---|
| 10 | 0.0107 | 0.6276 | 0.2117 | 0.0112 | 0.2603 | 0.209 | 0.0187 | 0.4399 | 0.1699 |
| 20 | 0.0117 | 0.5816 | 0.2634 | 0.0057 | 0.7272 | 0.156 | 0.0087 | 0.8007 | 0.1154 |
| 30 | 0.0116 | 0.5914 | 0.2917 | 0.0049 | 0.7726 | 0.1232 | 0.0186 | 0.4429 | 0.1678 |
| 40 | 0.0104 | 0.6402 | 0.2231 | 0.0058 | 0.7213 | 0.1535 | 0.0074 | 0.825 | 0.1015 |
| 50 | 0.0103 | 0.6482 | 0.2425 | 0.0061 | 0.7017 | 0.1387 | 0.0186 | 0.4407 | 0.1692 |
| 60 | 0.0122 | 0.5606 | 0.2589 | 0.0054 | 0.7425 | 0.1463 | 0.0077 | 0.817 | 0.11 |
| 70 | 0.0111 | 0.6125 | 0.2503 | 0.0073 | 0.6261 | 0.1668 | 0.0077 | 0.8159 | 0.1065 |
| 80 | 0.0106 | 0.6354 | 0.2188 | 0.0052 | 0.7551 | 0.1133 | 0.0085 | 0.7971 | 0.1174 |
| 90 | 0.0111 | 0.6228 | 0.1671 | 0.0052 | 0.7555 | 0.1458 | 0.0077 | 0.8178 | 0.1078 |
| 100 | 0.0109 | 0.6232 | 0.2742 | 0.0048 | 0.7755 | 0.1404 | 0.0104 | 0.7416 | 0.1202 |
Table 4.
Learned ANN SCG from 25 June 2018 in R203 (with Tin and rHin) and prediction with cross-validation for 26 June 2018 in R104 (with Tin and rHin), 27 June 2018 in R104 (with Tin and rHin), and 28 June 2018 in R104 (with Tin and rHin).
Table 4.
Learned ANN SCG from 25 June 2018 in R203 (with Tin and rHin) and prediction with cross-validation for 26 June 2018 in R104 (with Tin and rHin), 27 June 2018 in R104 (with Tin and rHin), and 28 June 2018 in R104 (with Tin and rHin).
| | 26 June 2018 in R104 | 27 June 2018 in R104 | 28 June 2018 in R104 |
|---|
| Number of Neurons ANN SCG | MSE | R | MAPE | MSE | R | MAPE | MSE | R | MAPE |
|---|
| (-) | (-) | (-) | (-) | (-) | (-) | (-) | (-) | (-) |
|---|
| 10 | 0.0097 | 0.6714 | 0.3365 | 0.0121 | 0.2188 | 0.2147 | 0.0187 | 0.4399 | 0.1694 |
| 20 | 0.0102 | 0.6516 | 0.2259 | 0.0052 | 0.7541 | 0.1466 | 0.0186 | 0.4418 | 0.1713 |
| 30 | 0.0105 | 0.6398 | 0.2233 | 0.0061 | 0.7052 | 0.1395 | 0.0187 | 0.4396 | 0.1699 |
| 40 | 0.0099 | 0.6643 | 0.2074 | 0.0055 | 0.7389 | 0.144 | 0.0128 | 0.6684 | 0.1197 |
| 50 | 0.0098 | 0.6685 | 0.2099 | 0.0059 | 0.7136 | 0.1319 | 0.0186 | 0.4411 | 0.1692 |
| 60 | 0.0098 | 0.6697 | 0.2044 | 0.0055 | 0.7387 | 0.1544 | 0.0025 | 0.9135 | 0.0905 |
| 70 | 0.0099 | 0.6626 | 0.1937 | 0.0056 | 0.7345 | 0.1464 | 0.0082 | 0.8031 | 0.1089 |
| 80 | 0.0101 | 0.6542 | 0.2063 | 0.0051 | 0.7567 | 0.1134 | 0.0096 | 0.7676 | 0.1121 |
| 90 | 0.0095 | 0.6822 | 0.1859 | 0.0051 | 0.7613 | 0.1429 | 0.0085 | 0.7959 | 0.1216 |
| 100 | 0.01 | 0.6587 | 0.2005 | 0.0043 | 0.8027 | 0.1202 | 0.0077 | 0.8175 | 0.1041 |
Table 5.
Learned ANN SCG from 25 June 2018 in R203 (with Tin, rHin and an FBG sensor for PPM) and prediction with cross-validation for 26 June 2018 in R203 (with Tin, rHin and an FBG sensor for PPM), 27 June 2018 in R203 (with Tin, rHin and an FBG sensor for PPM), 28 June 2018 in R203 (with Tin, rHin and an FBG sensor for PPM).
Table 5.
Learned ANN SCG from 25 June 2018 in R203 (with Tin, rHin and an FBG sensor for PPM) and prediction with cross-validation for 26 June 2018 in R203 (with Tin, rHin and an FBG sensor for PPM), 27 June 2018 in R203 (with Tin, rHin and an FBG sensor for PPM), 28 June 2018 in R203 (with Tin, rHin and an FBG sensor for PPM).
| | 26 June 2018 in R203 | 27 June 2018 in R203 | 28 June 2018 in R203 |
|---|
| Number of Neurons ANN SCG | MSE | R | MAPE | MSE | R | MAPE | MSE | R | MAPE |
|---|
| (-) | (-) | (-) | (-) | (-) | (-) | (-) | (-) | (-) |
|---|
| 10 | 0.0048 | 0.9139 | 0.2285 | 0.006 | 0.5094 | 0.198 | 0.0201 | 0.6521 | 0.2644 |
| 20 | 0.0055 | 0.9013 | 0.2814 | 0.006 | 0.5098 | 0.1992 | 0.0176 | 0.7052 | 0.2928 |
| 30 | 0.0057 | 0.8976 | 0.301 | 0.0058 | 0.5355 | 0.1794 | 0.0144 | 0.7684 | 0.2296 |
| 40 | 0.0049 | 0.9117 | 0.2189 | 0.0056 | 0.5555 | 0.2036 | 0.0206 | 0.64 | 0.3237 |
| 50 | 0.0064 | 0.8835 | 0.2802 | 0.0056 | 0.5591 | 0.1633 | 0.0141 | 0.7729 | 0.2079 |
| 60 | 0.004 | 0.9281 | 0.2255 | 0.0061 | 0.5084 | 0.1906 | 0.0132 | 0.7894 | 0.2 |
| 70 | 0.0048 | 0.9135 | 0.2377 | 0.0054 | 0.5824 | 0.1861 | 0.0142 | 0.7704 | 0.2353 |
| 80 | 0.0052 | 0.906 | 0.2541 | 0.0059 | 0.5261 | 0.1845 | 0.0124 | 0.8038 | 0.2117 |
| 90 | 0.0074 | 0.8684 | 0.2987 | 0.0065 | 0.4645 | 0.2097 | 0.0203 | 0.6467 | 0.3084 |
| 100 | 0.0044 | 0.9218 | 0.1693 | 0.0047 | 0.6489 | 0.1614 | 0.0203 | 0.6465 | 0.3002 |
Table 6.
Learned ANN SCG from 25 June 2018 in R203 (with Tin, rHin and an FBG sensor for PPM) and prediction with cross-validation for 26 June 2018 in R204 (with Tin, rHin and an FBG sensor for PPM), 27 June 2018 in R204 (with Tin, rHin and an FBG sensor for PPM), 28 June 2018 in R204 (with Tin, rHin and an FBG sensor for PPM).
Table 6.
Learned ANN SCG from 25 June 2018 in R203 (with Tin, rHin and an FBG sensor for PPM) and prediction with cross-validation for 26 June 2018 in R204 (with Tin, rHin and an FBG sensor for PPM), 27 June 2018 in R204 (with Tin, rHin and an FBG sensor for PPM), 28 June 2018 in R204 (with Tin, rHin and an FBG sensor for PPM).
| | 26 June 2018 in R204 | 27 June 2018 in R204 | 28 June 2018 in R204 |
|---|
| Number of Neurons ANN SCG | MSE | R | MAPE | MSE | R | MAPE | MSE | R | MAPE |
|---|
| (-) | (-) | (-) | (-) | (-) | (-) | (-) | (-) | (-) |
|---|
| 10 | 0.0111 | 0.6096 | 0.0312 | 0.0111 | 0.2745 | 0.2039 | 0.0187 | 0.4407 | 0.172 |
| 20 | 0.0115 | 0.5939 | 0.2684 | 0.0111 | 0.302 | 0.2044 | 0.0053 | 0.8785 | 0.1011 |
| 30 | 0.0106 | 0.6343 | 0.2093 | 0.0063 | 0.6936 | 0.1521 | 0.0186 | 0.4421 | 0.1699 |
| 40 | 0.0113 | 0.6022 | 0.2116 | 0.0061 | 0.702 | 0.1549 | 0.0186 | 0.4422 | 0.1709 |
| 50 | 0.0107 | 0.6311 | 0.2047 | 0.0058 | 0.7221 | 0.1323 | 0.0082 | 0.8024 | 0.1139 |
| 60 | 0.01 | 0.6595 | 0.1621 | 0.0037 | 0.8352 | 0.1111 | 0.0078 | 0.8139 | 0.101 |
| 70 | 0.0098 | 0.6679 | 0.2093 | 0.0062 | 0.6994 | 0.1459 | 0.0084 | 0.7997 | 0.109 |
| 80 | 0.013 | 0.5346 | 0.2705 | 0.0045 | 0.7912 | 0.1289 | 0.0186 | 0.4409 | 0.1695 |
| 90 | 0.0109 | 0.6201 | 0.2235 | 0.0052 | 0.756 | 0.1452 | 0.0048 | 0.8912 | 0.0891 |
| 100 | 0.0095 | 0.6812 | 0.1807 | 0.0038 | 0.8289 | 0.1018 | 0.0068 | 0.8397 | 0.0948 |
Table 7.
Learned ANN SCG from 25 June 2018 in R203 (with Tin, rHin and an FBG sensor for PPM) and prediction with cross-validation for 26 June 2018 in R104 (with Tin, rHin and an FBG sensor for PPM), 27 June 2018 in R104 (with Tin, rHin and an FBG sensor for PPM), 28 June 2018 in R104 (with Tin, rHin and an FBG sensor for PPM).
Table 7.
Learned ANN SCG from 25 June 2018 in R203 (with Tin, rHin and an FBG sensor for PPM) and prediction with cross-validation for 26 June 2018 in R104 (with Tin, rHin and an FBG sensor for PPM), 27 June 2018 in R104 (with Tin, rHin and an FBG sensor for PPM), 28 June 2018 in R104 (with Tin, rHin and an FBG sensor for PPM).
| | 26 June 2018 in R104 | 27 June 2018 in R104 | 28 June 2018 in R104 |
|---|
| Number of Neurons ANN SCG | MSE | R | MAPE | MSE | R | MAPE | MSE | R | MAPE |
|---|
| (-) | (-) | (-) | (-) | (-) | (-) | (-) | (-) | (-) |
|---|
| 10 | 0.0104 | 0.6432 | 0.2095 | 0.0112 | 0.2735 | 0.2028 | 0.0231 | 0.3505 | 0.2229 |
| 20 | 0.0117 | 0.5828 | 0.0638 | 0.0109 | 0.3042 | 0.2001 | 0.0195 | 0.4006 | 0.2088 |
| 30 | 0.0115 | 0.5987 | 0.2458 | 0.006 | 0.7079 | 0.151 | 0.0187 | 0.4416 | 0.1723 |
| 40 | 0.0103 | 0.6482 | 0.2155 | 0.0065 | 0.6818 | 0.1532 | 0.0187 | 0.4404 | 0.173 |
| 50 | 0.01 | 0.6612 | 0.2053 | 0.0051 | 0.7592 | 0.1147 | 0.0082 | 0.8034 | 0.1133 |
| 60 | 0.01 | 0.6613 | 0.2 | 0.0033 | 0.8534 | 0.0968 | 0.0074 | 0.8245 | 0.0953 |
| 70 | 0.0114 | 0.6135 | 0.2786 | 0.0066 | 0.6759 | 0.1525 | 0.0083 | 0.8015 | 0.108 |
| 80 | 0.0105 | 0.6379 | 0.2151 | 0.0042 | 0.8063 | 0.0555 | 0.0186 | 0.443 | 0.1678 |
| 90 | 0.0095 | 0.6799 | 0.1926 | 0.0048 | 0.7748 | 0.1293 | 0.0082 | 0.8052 | 0.1112 |
| 100 | 0.0089 | 0.7067 | 0.1906 | 0.0043 | 0.8026 | 0.103 | 0.0076 | 0.8194 | 0.1059 |





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}