1. Introduction
Inertial Navigation System (INS), as an entirely self-contained system, can obtain attitude, velocity and position of the vehicle by resolving the data sampled by its Inertial Measurement Unit (IMU) containing tri-axis gyroscopes and accelerometers [
1]. With the characteristics of high reliability and data rate, INS is widely used in airplanes, missiles, automobiles, submarines, ships, and robots [
2,
3,
4,
5]. However, the navigation errors of INS are mainly caused by the gyroscope drifts and accelerometer biases. In order to improve the accuracy of INS without using the high-cost and high-precision IMU, the Rotational Inertial Navigation System (RINS) has been proposed [
6,
7,
8]. In a RINS, the IMU is mounted on a rotary table and forced to rotate along the given axes back and forth to modulate the errors of IMU from constant to periodically varying components, so as to reduce the navigation errors [
9].
The research on RINS can date back to 1968 when Geller proposed a local level inertial platform that continuously rotated in azimuth and concluded that the platform rotation attenuated the system position error [
10]. From then on, RINS based on IMU of various accuracies have been widely studied. In 1980s, with the development of laser gyroscopes, RINSs based on laser gyroscopes were used for marine navigation, with the ability to supply accurate navigation information for several days [
11,
12]. In 2004, Yang and Miao analyzed the single-axis RINS based on the fiber-optic gyroscopes [
13]. In 2013, Sun et al. proposed a MEMS-based RINS in which the significant sensor biases were compensated to attenuate the navigation errors [
14].
RINS can be divided into single-axis [
8,
15], dual-axis [
16,
17] and tri-axis [
18,
19] according to the number of rotation axis. Theoretically, at least two rotation axes should be used to reduce the impact of all tri-axis IMU errors. However, the errors of horizontal IMU contribute more to the navigation system [
20]. Hence, the single-axis RINS with its low cost and characteristic of restraining the IMU errors in horizontal axis has been widely used for high-accuracy navigation. Although the rotation modulation can fulfill self-compensation of IMU errors during the alignment and navigation process, the premise is that the IMU errors especially the biases are constant during each rotation cycle. However, the environment temperature and the power heating during the single-axis RINS cold starts affect the IMU performance and make the IMU biases change over time, which cannot be modulated by rotation and will decrease the accuracy of single-axis RINS.
In order to compensate the IMU errors caused by the temperature, plenty of works have been done according to the grade of IMUs, and it has been proved that the thermal calibration process is time-consuming and costly. There are currently two main approaches for thermal calibration: The Soak method and the Ramp method. The Soak method works on the premise of stable sensor temperature while the Ramp method is based on time-varying sensor temperature. Although time-consuming, the Soak method can achieve better accuracy. In 2013, Niu et al. proposed a fast thermal calibration method for low-grade IMU based on the Ramp method and concluded that the compensation accuracy based on the proposed method was close to the Soak method and the calibration time was significantly reduced [
21]. In 2016, Wang et al. proposed a Soak method to calibrate the MEMS IMU’s biases, scale factor errors and non-orthogonalities varying with temperature [
22]. In 2017, Zhang et al. proposed a parameter-interpolation method to calibrate the MEMS gyroscope’s biases and scale factor errors caused by the temperature [
23]. In 2018, Yang et al. utilized the calibration data in 10 temperature points based on the Lagrange interpolation method to calibrate the tri-axial MEMS gyroscope over a full temperature range [
24]. With the development of artificial intelligence, many thermal calibration methods for IMU based on Back Propagation neural network [
25], Elman neural network [
26] and fuzzy neural network [
27] have been proposed, and it is concluded that the compensation results are more accurate than the traditional thermal calibration method.
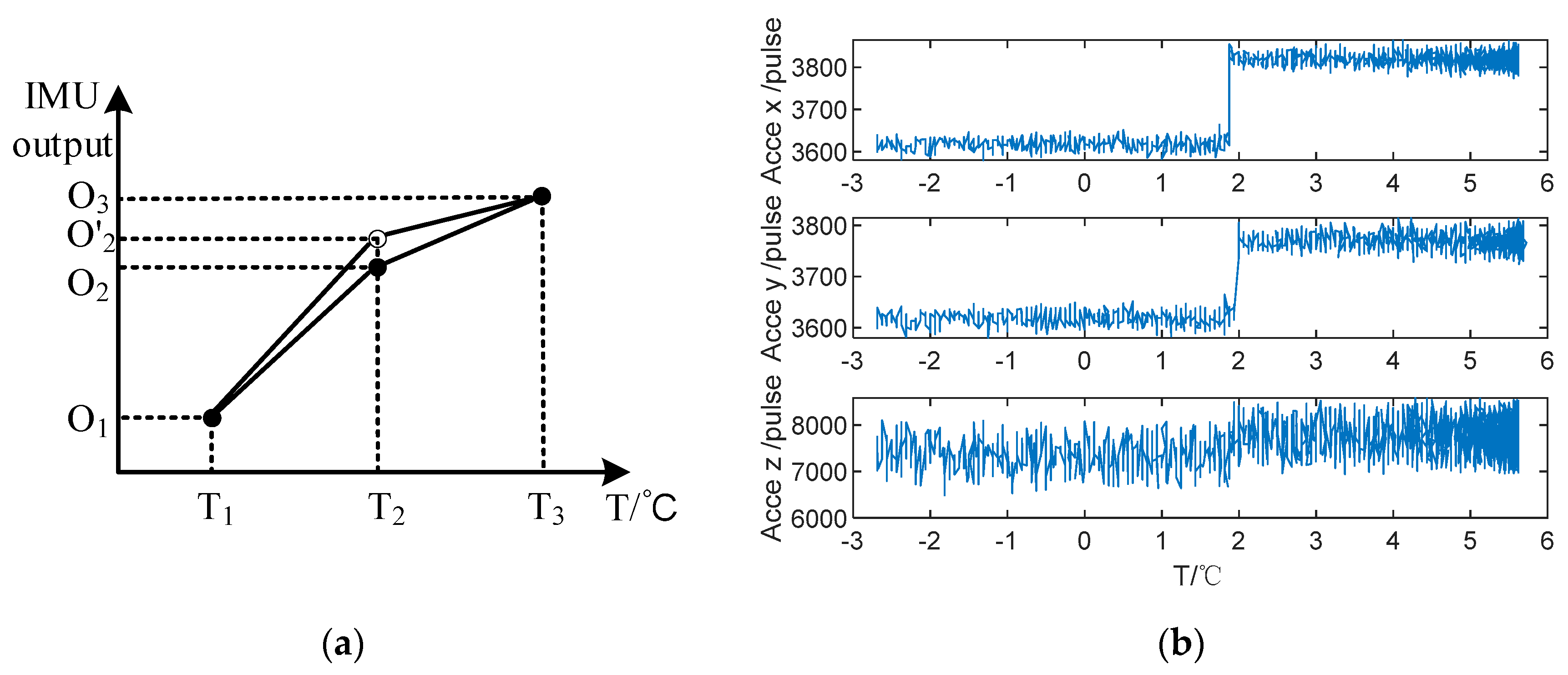
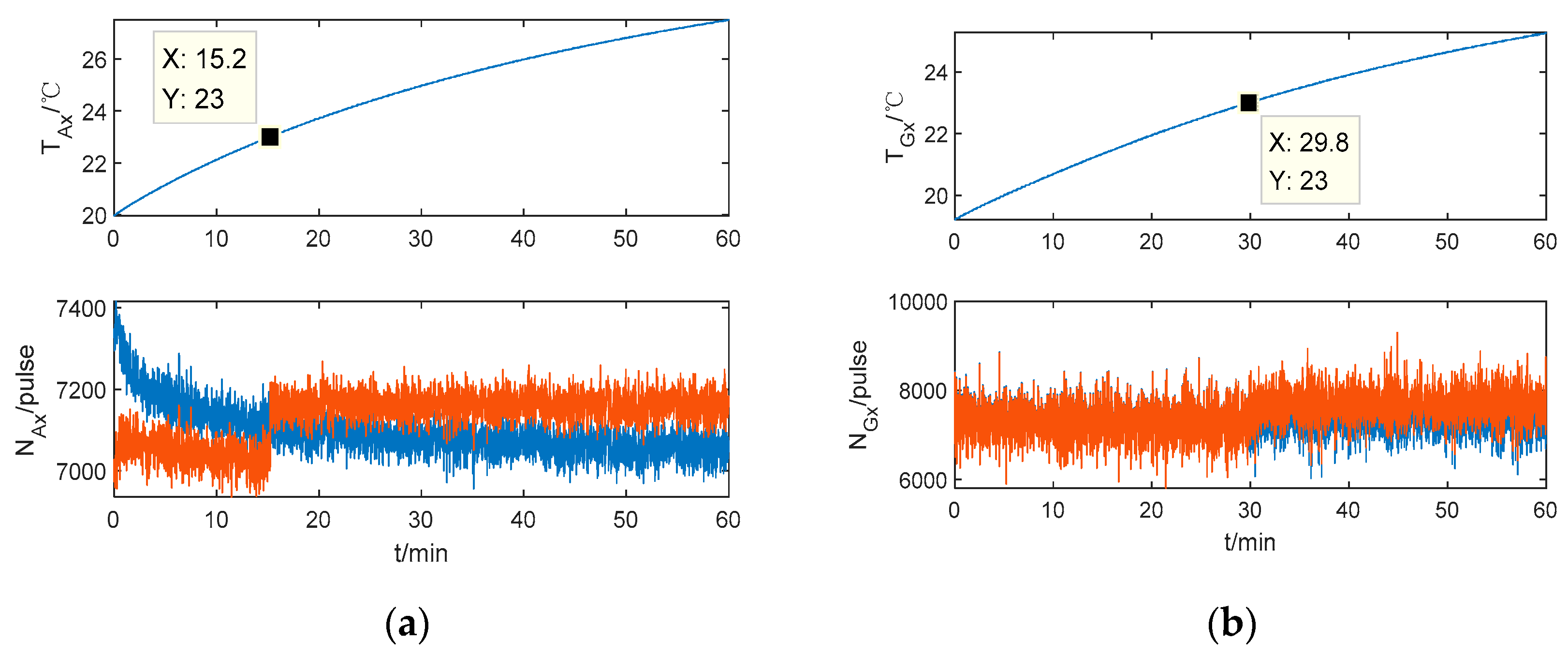
In a word, although the thermal calibration method for IMU has been widely researched, some problems are still not settled. Firstly, the thermal calibration model lacks the reflection for the work environment. There exists a temperature field caused by the power of single-axis RINS heating and the environmental temperature change. What is more, the temperature field is more complicated during the cold start process. Besides, both polynomial and interpolation calibration methods utilize the sectional compensation method among all temperature points. However, the segment points may change because the IMU biases are different due to the repetition priming as shown in
Figure 1a, and it makes the compensated IMU data step-like at the segment points as shown in
Figure 1b, which decrease the position accuracy of single-axis RINS.
Hence, in order to reflect the temperature field change accurately, especially during the cold start process, the sensor temperature, temperature change rate and temperature gradient inside and outside the sensor should be introduced to the thermal calibration model. Besides, an overall compensation method should be proposed to overcome the drawbacks of the sectional compensation method.
The main purpose of this paper is to improve the accuracy of single-axis RINS over a work temperature range by thermal modeling and calibration of IMU. The rest of this paper is organized as follows. The single-axis RINS error analysis with the IMU biases is made in
Section 2. The effects of the temperature on the change of IMU biases are analyzed based on the experiment data in
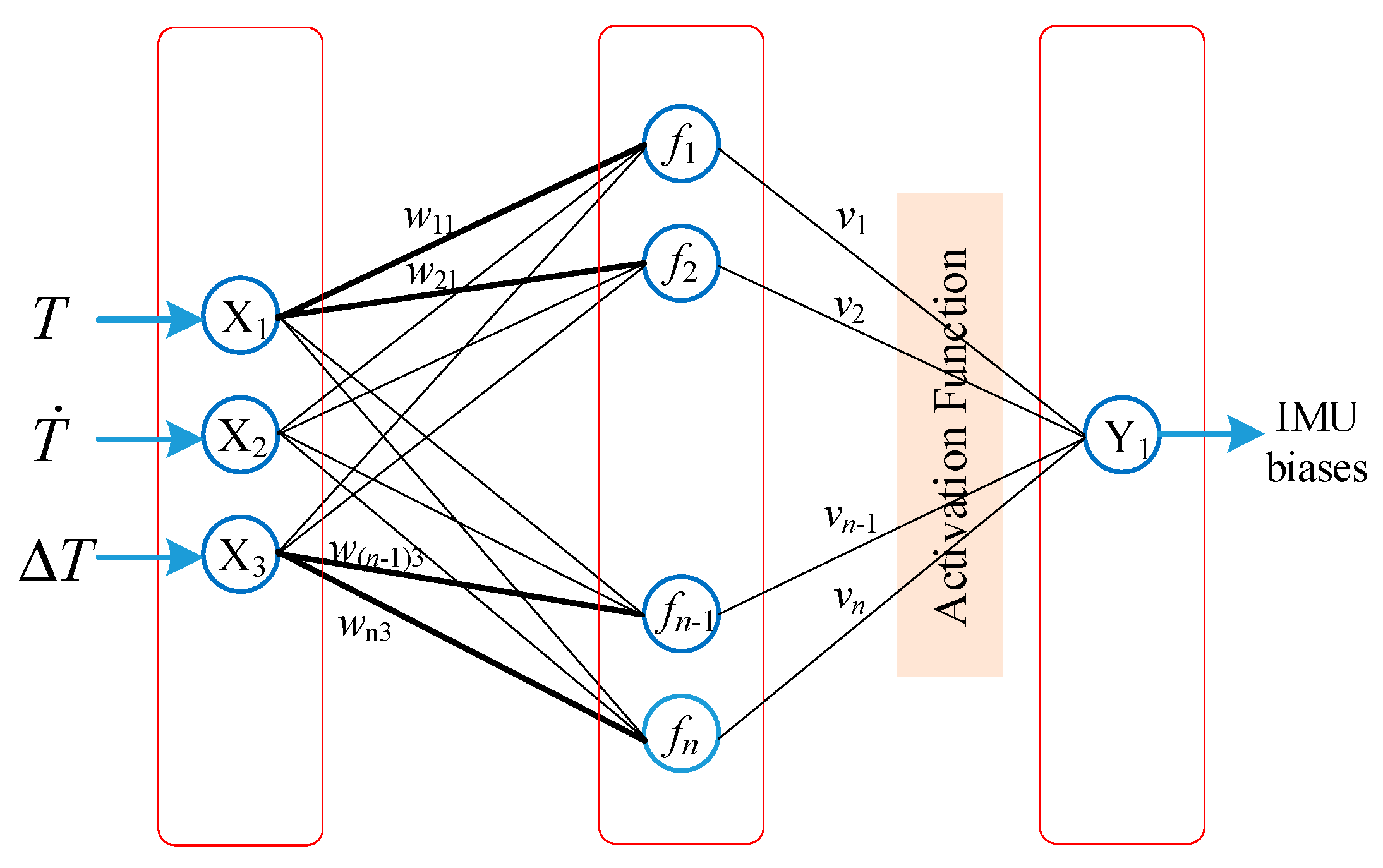
Section 3. The thermal calibration method based on the multiple nonlinear regression method and BP-neural network method are proposed in
Section 4. The analysis of simulation and experiment results are presented in
Section 5. Finally, the conclusions are concluded in
Section 6.
3. The Effects of Temperature on IMU Biases
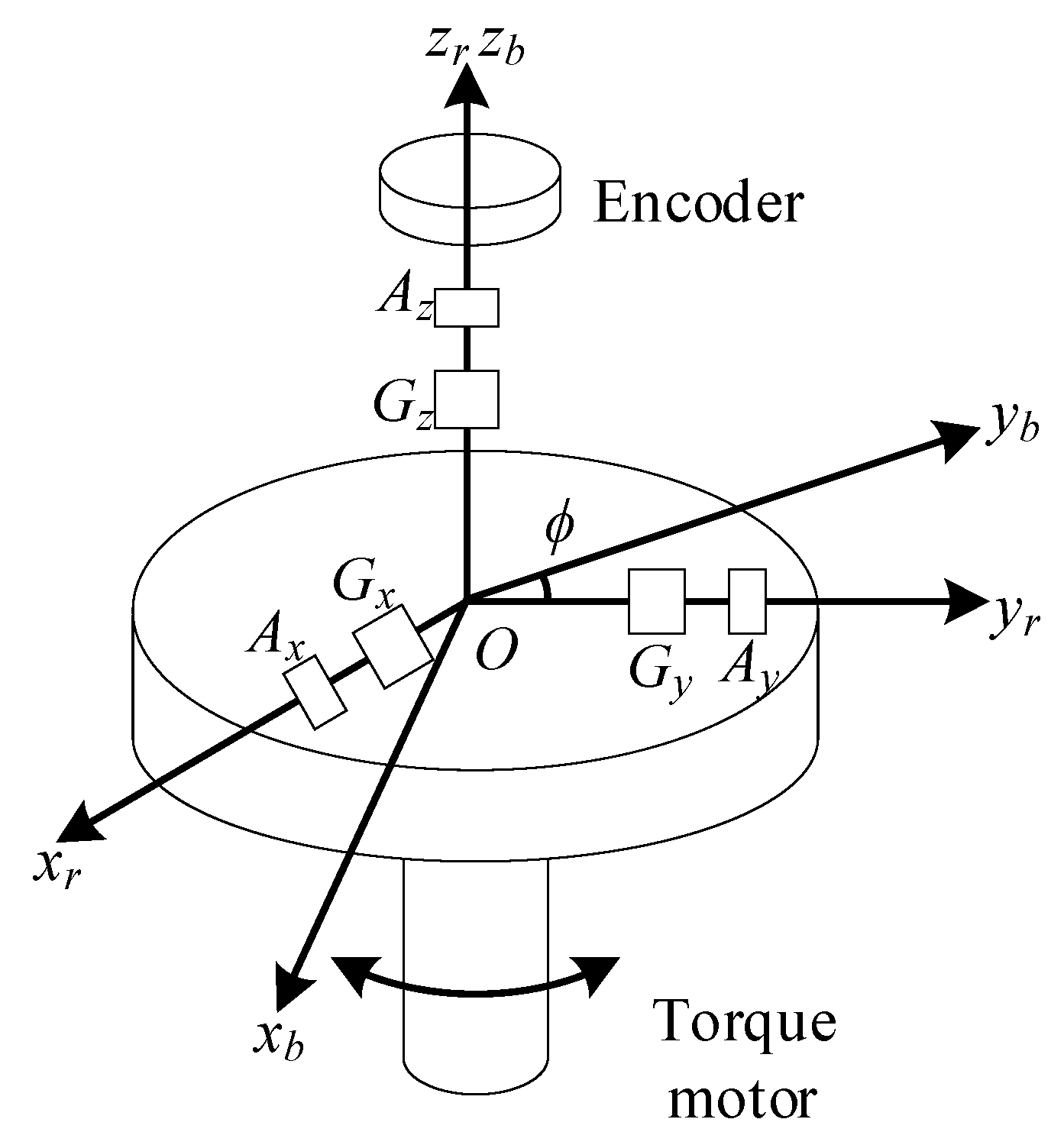
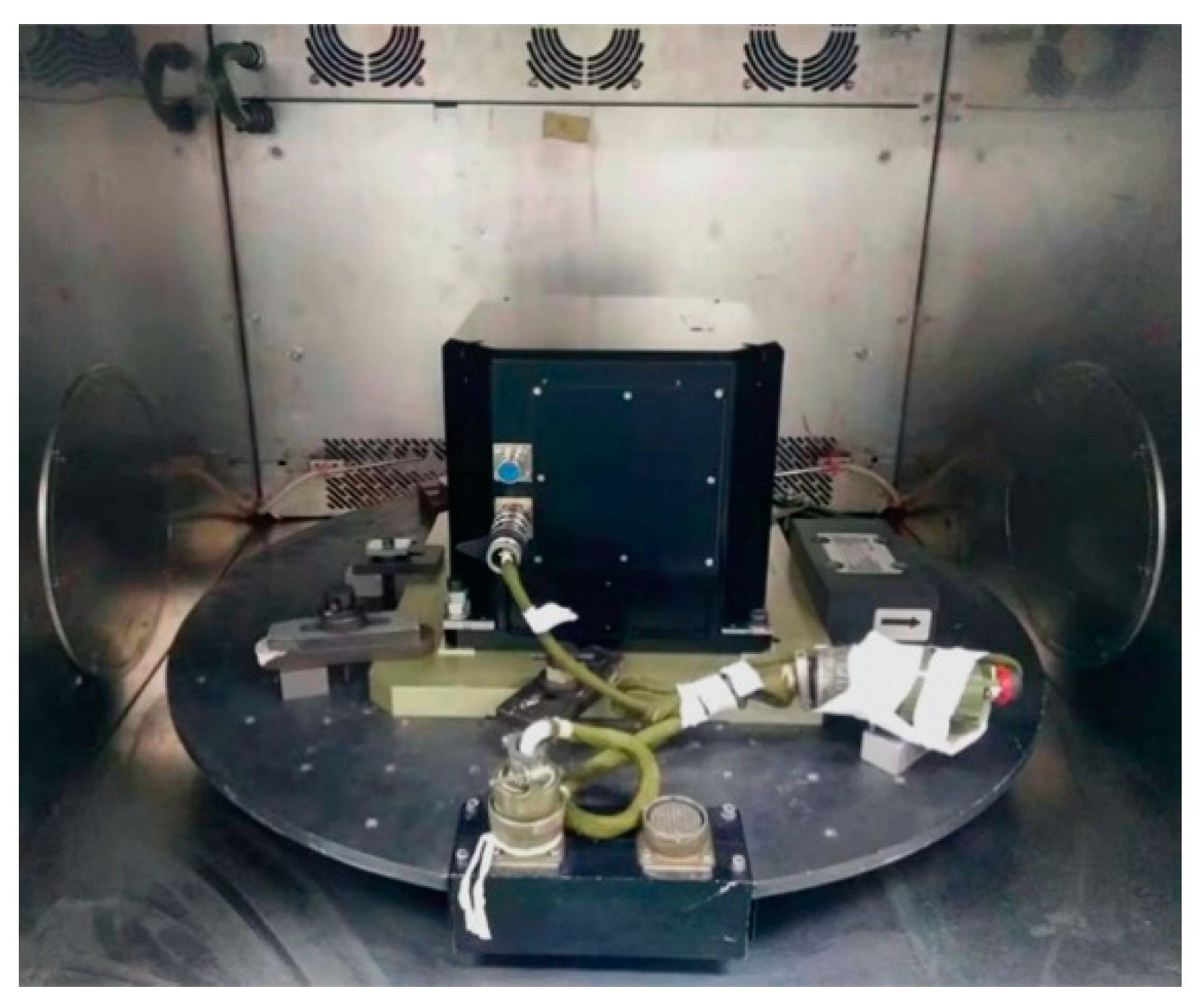
In order to analyze the effects of temperature on IMU biases, there are several equipments: the two-axis turntable with a thermal chamber, and the temperature sensors inside and outside the IMU. The performance of thermal calibration equipment is shown in
Table 2. The thermal chamber is used to simulate the temperature change of the work environment. It should be pointed out that the IMU chip is packaged with the temperature sensor inside, and attached is a temperature sensor in the surface of the package, which is defined as the outside temperature sensor. The inside temperature sensor reflects the sensor heating, while the outside temperature sensor reflects the power heating and the environmental temperature change.
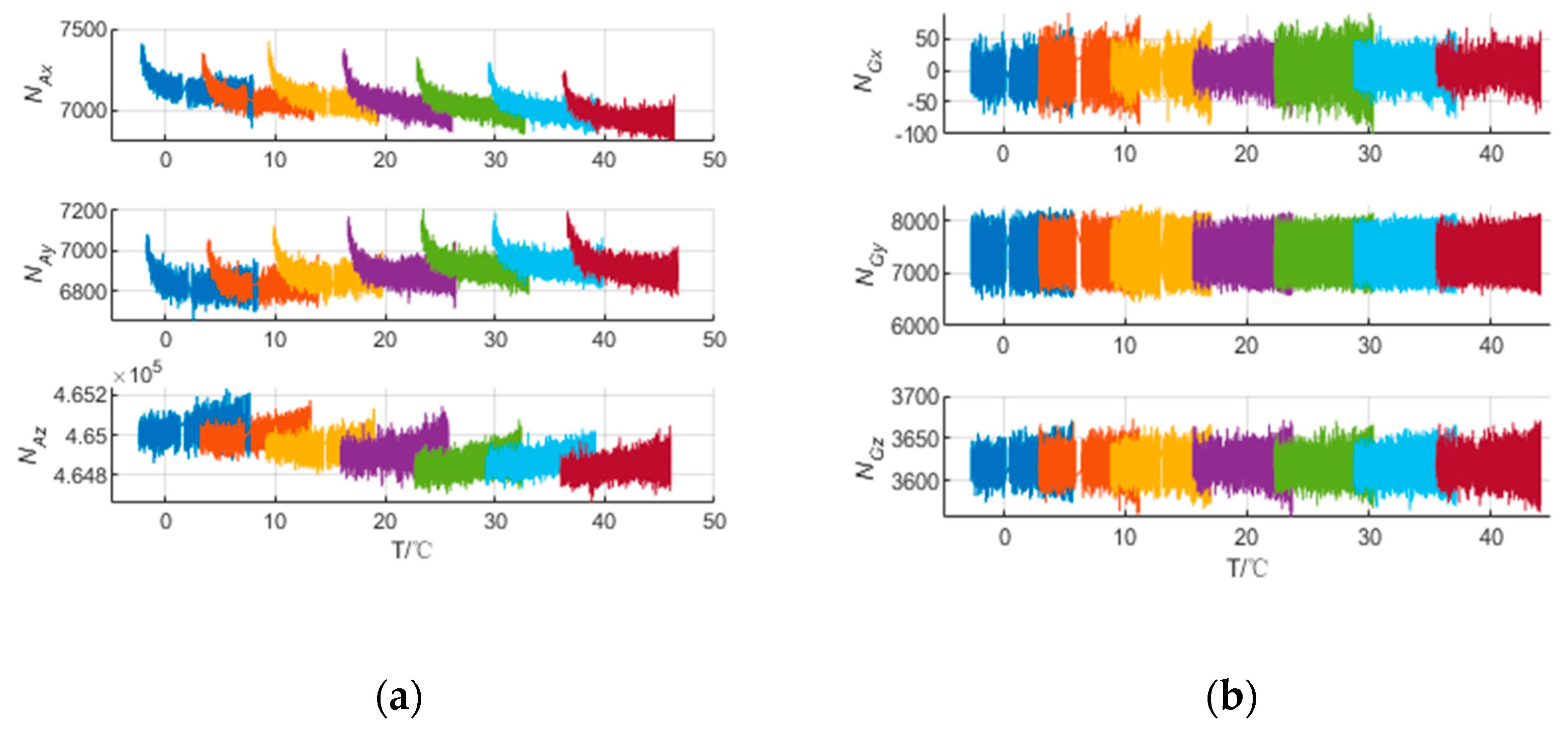
For the high-precision navigation grade IMU, the soak method is more accurate than the ramp method. Hence, we utilize the soak method to analysis the temperature field when the single-axis RINS cold starts at different temperature points. The single-axis RINS was installed on the turntable in the quasi-static state, and the thermal chamber was set at seven temperature points, which is shown in
Table 3. These temperature points have covered the working temperature range of single-axis RINS. The single-axis RINS kept thermal insulation for 3 h before the cold start, and then turned on the single-axis RINS without the torque motor rotation at each temperature point.
The IMU output at different temperature points is shown in
Figure 3. It should be pointed out that the outliers caused by the torque motor vibration were excluded. Obviously, the IMU biases change variously at different temperature points, and the accelerometers of single-axis RINS are more sensitive to temperature field than the gyroscopes. In order to ensure the effects of modulation for single-axis RINS, the IMU biases caused by temperature should be calibrated and compensated. The traditional calibration methods based on the polynomial or interpolation method utilize the sectional calibration and compensation method at different temperature points. However, it results in the IMU output errors shown in
Figure 1b and decreases the position accuracy of single-axis RINS. Besides, the temperature gradient is ignored in the traditional method, hence, the temperature variation between the environment and the single-axis RINS cannot be reflected in the IMU thermal model.
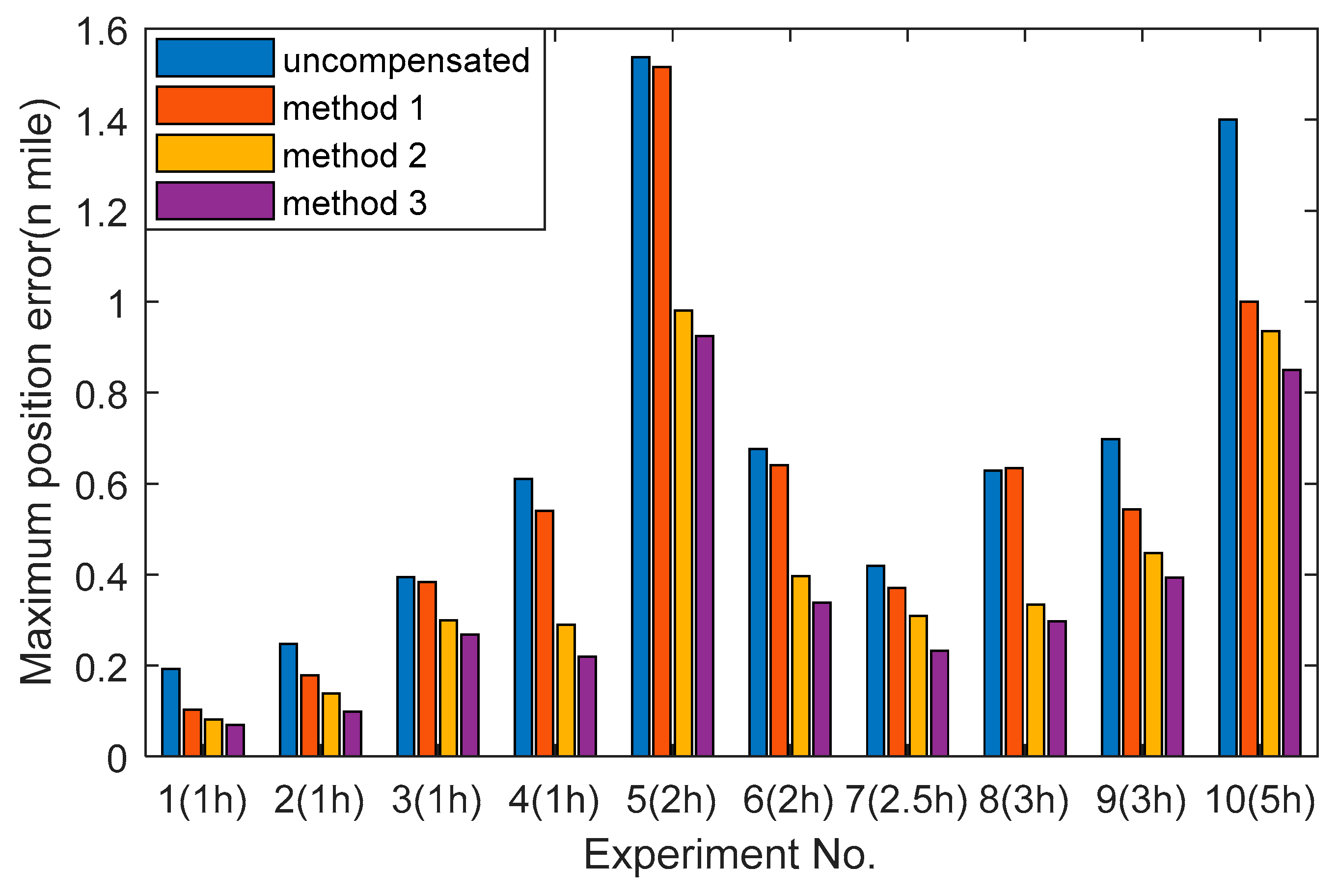
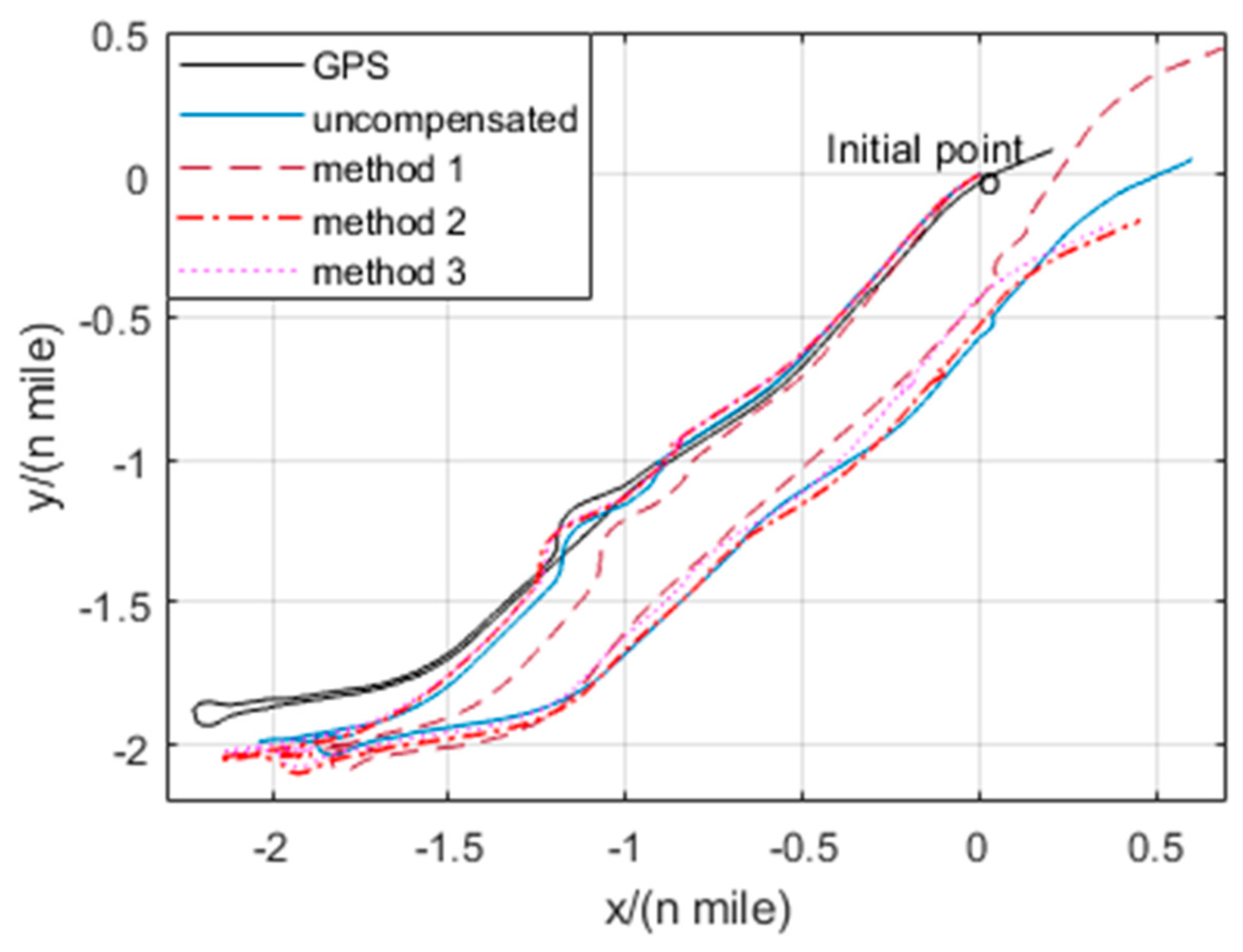
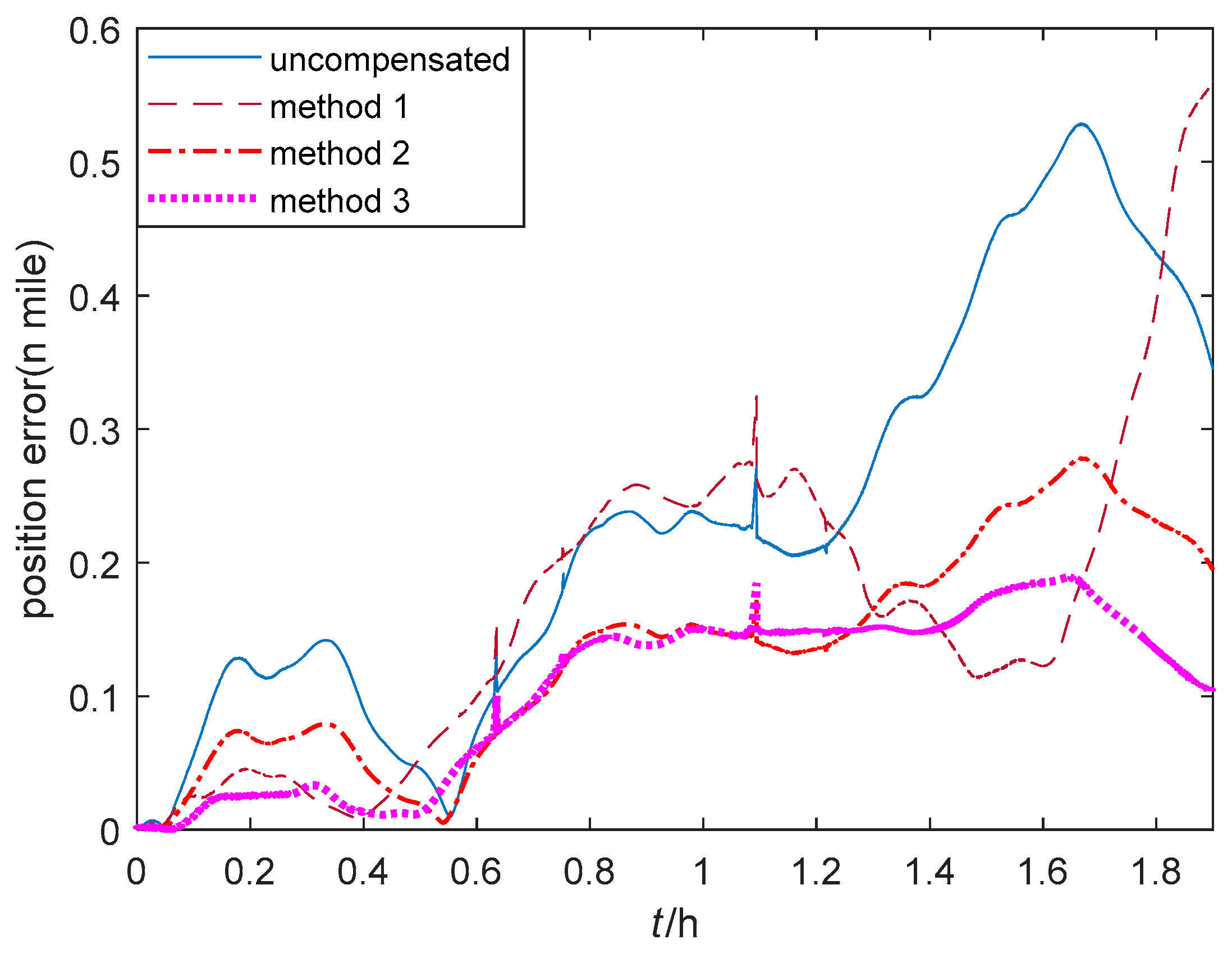
6. Conclusions
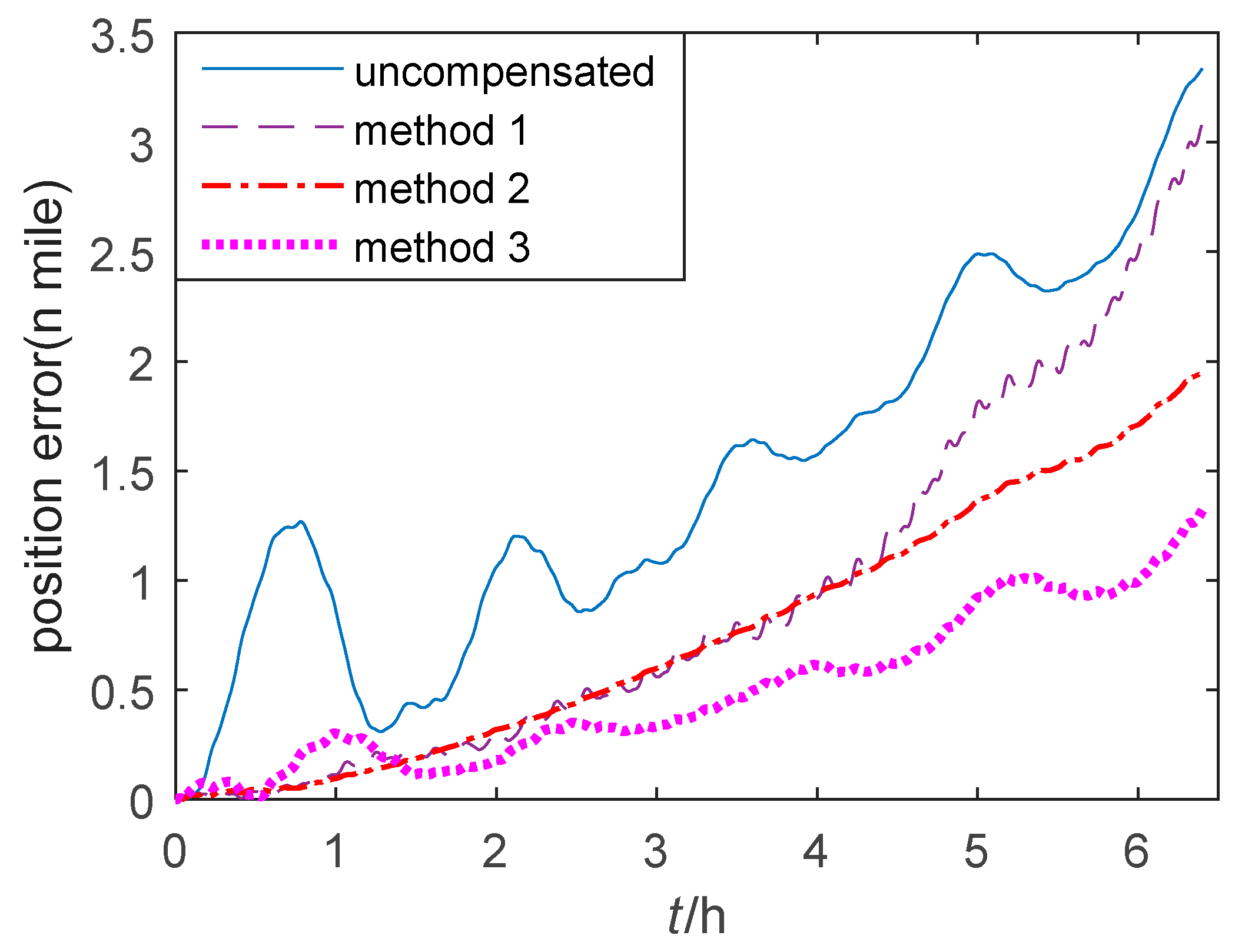
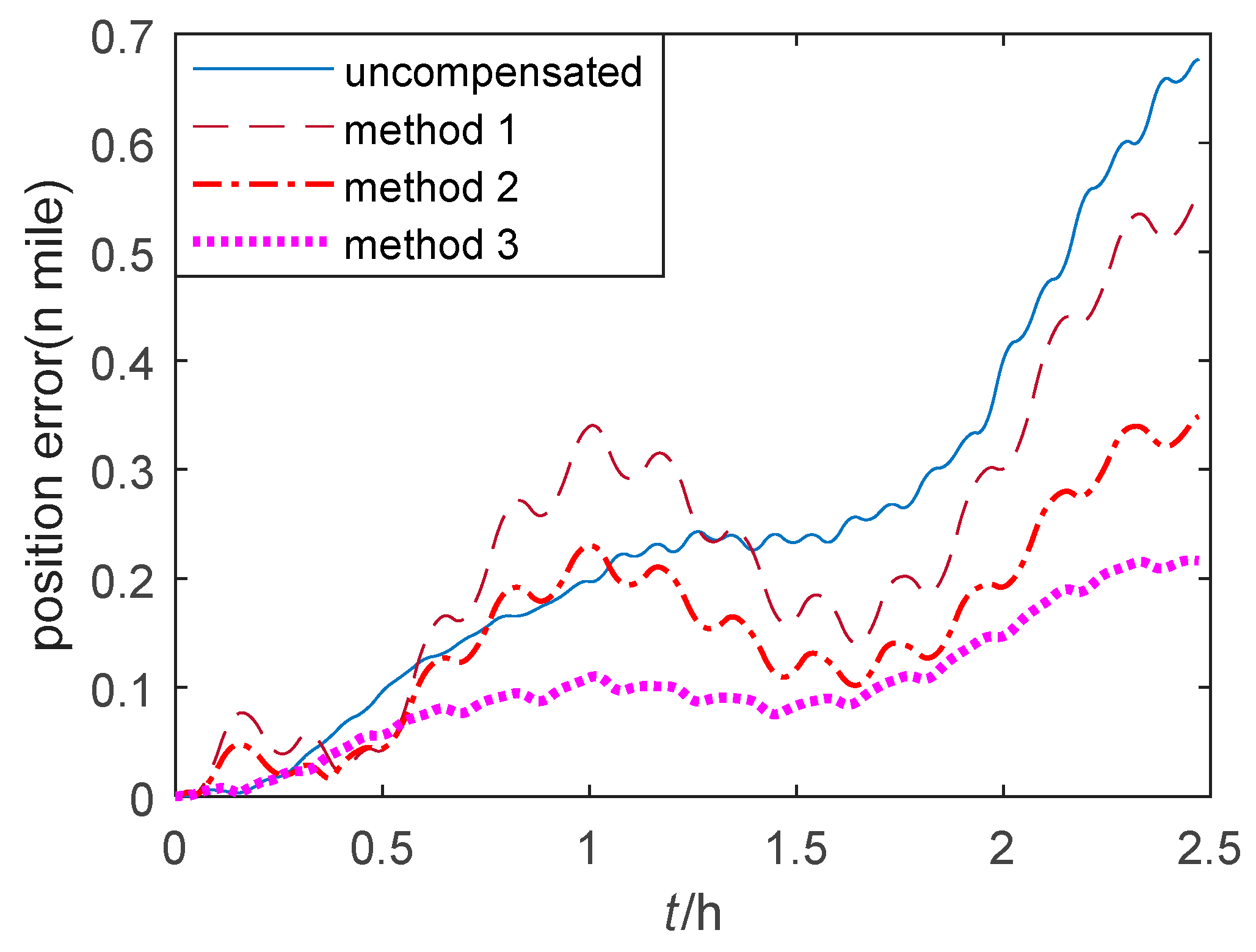
This paper presents a study on the thermal calibration method based on multiple regression and BP neural networks for single-axis RINS. The effects of the change of IMU biases caused by the temperature are analyzed, and it is proven that the change of IMU biases should be considered in order to improve the position accuracy of single-axis RINS. A thermal calibration model is established with the temperature variables including the temperature, the temperature change rate and the temperature gradient, and the regression method is designed based on the relationship between the order of the thermal model and the RMS of calibration errors. To describe the complex temperature field thoroughly, the BP neural network with consideration of the coupled items between the temperature variables are introduced, and in addition, the number of neurons in the hidden layer are analyzed to improve the accuracy of estimation with the least computational complexity. Finally, experiments are conducted to test the performance of the two proposed methods. The results of navigation experiments in lab and field based on the traditional thermal calibration, the multiple regression method and BP neural network are compared. It is shown that the IMU outputs are continued without step-like appearance for the two proposed methods, and the RMS of calibration errors are less than that in the traditional thermal calibration method, because the temperature gradient and the coupled temperature items are considered in the model. It is concluded that the proposed thermal calibration methods can compensate the change of biases caused by temperature, which leads to the improvement in position accuracy of single-axis RINS.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}