Parametric Electromagnetic Analysis of Radar-Based Advanced Driver Assistant Systems

 , , ,
, , , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
Model Order Reduction
2. Parametric Electromagnetic Fields
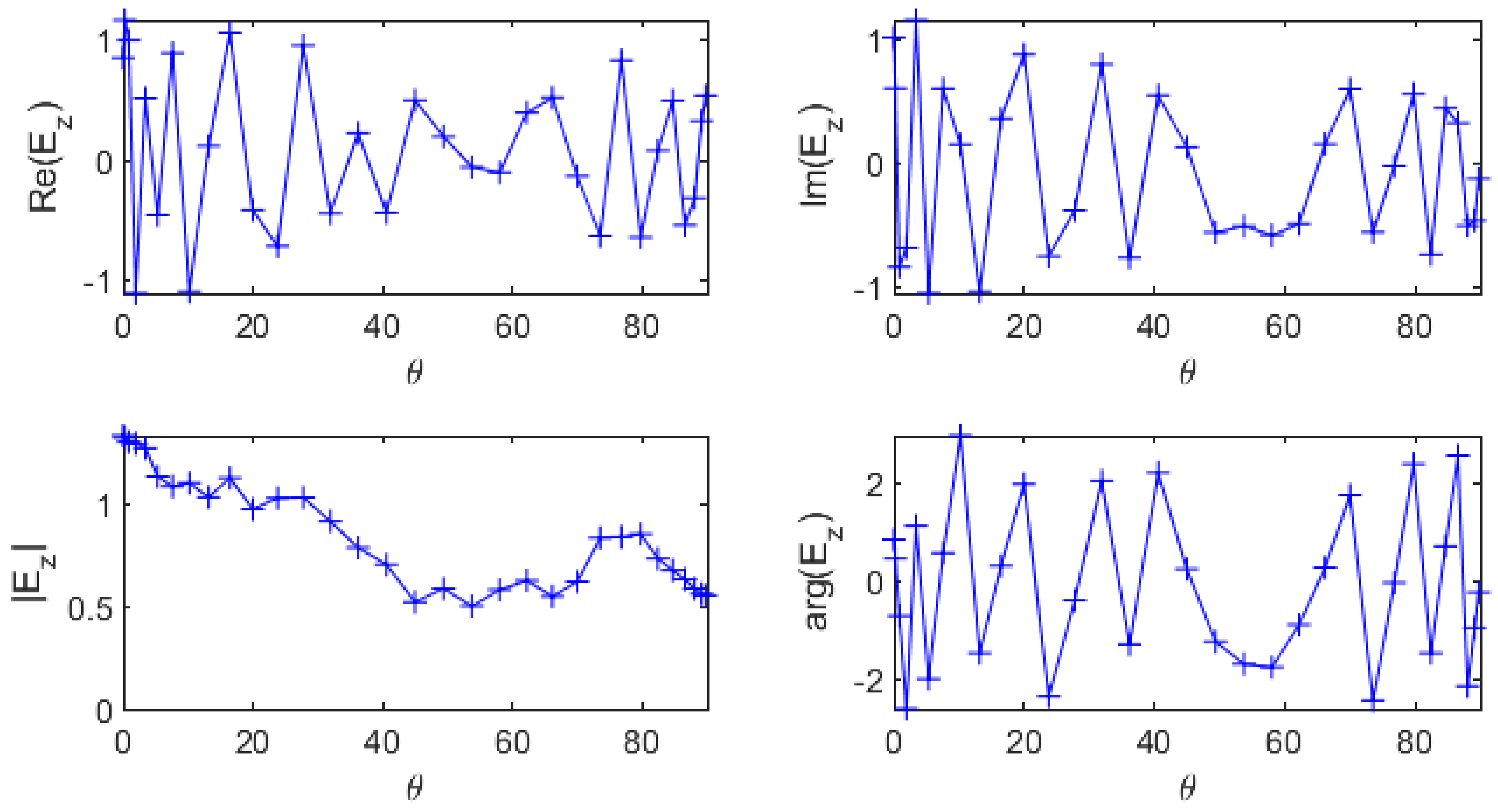
2.1. Real-Imaginary Interpolation Versus Magnitude-Phase Interpolation
2.2. Phase Unwrapping in Smooth Parametric Settings
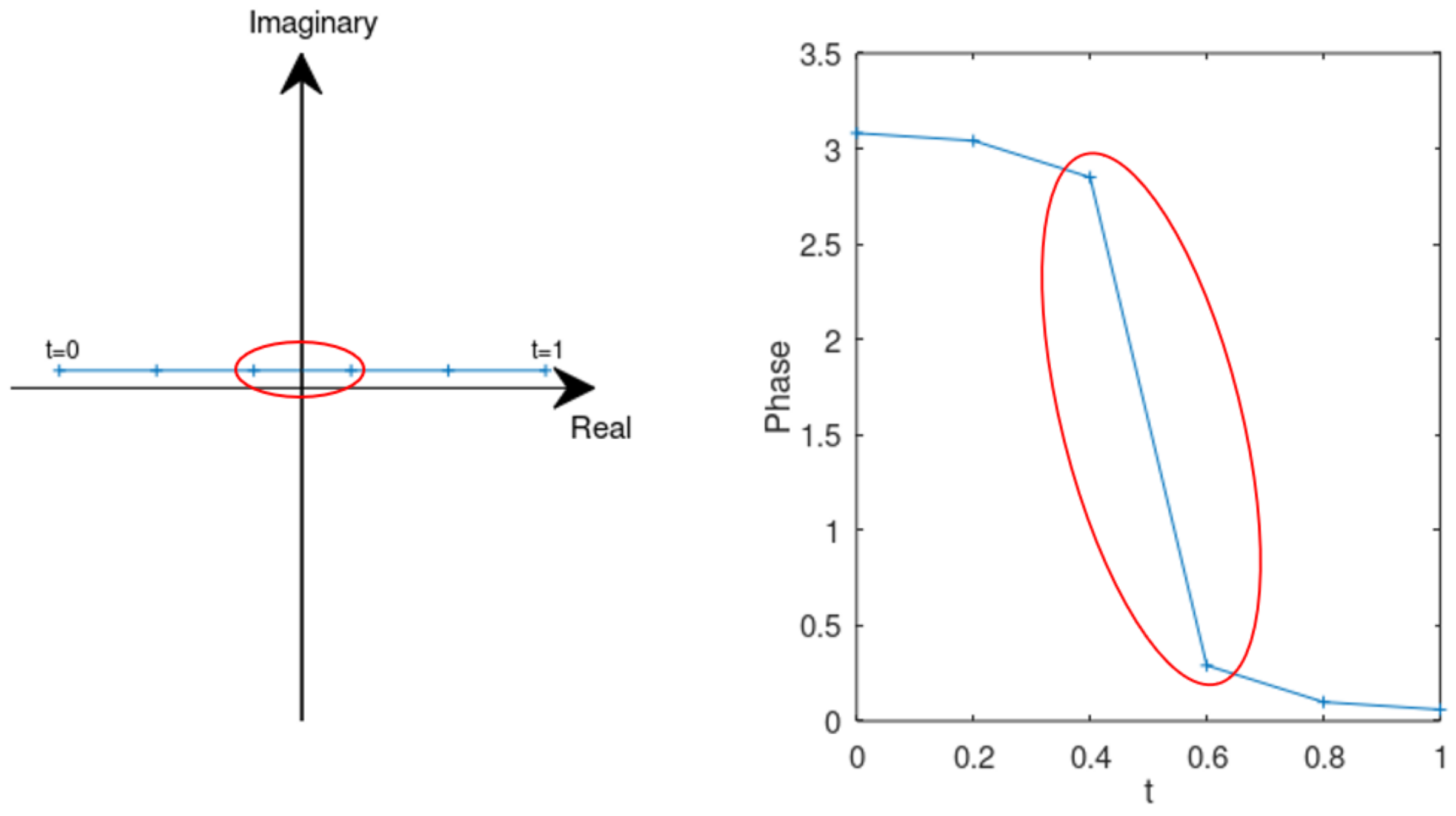
2.3. Robustness Issues
- Even with very regular data, the phase can have a chaotic behavior when the magnitude is close to zero, which means our hypothesis on the regularity of the phase is not valid.
- Since the different phase values are computed sequentially using the previous ones, local irregularities result in high global error.
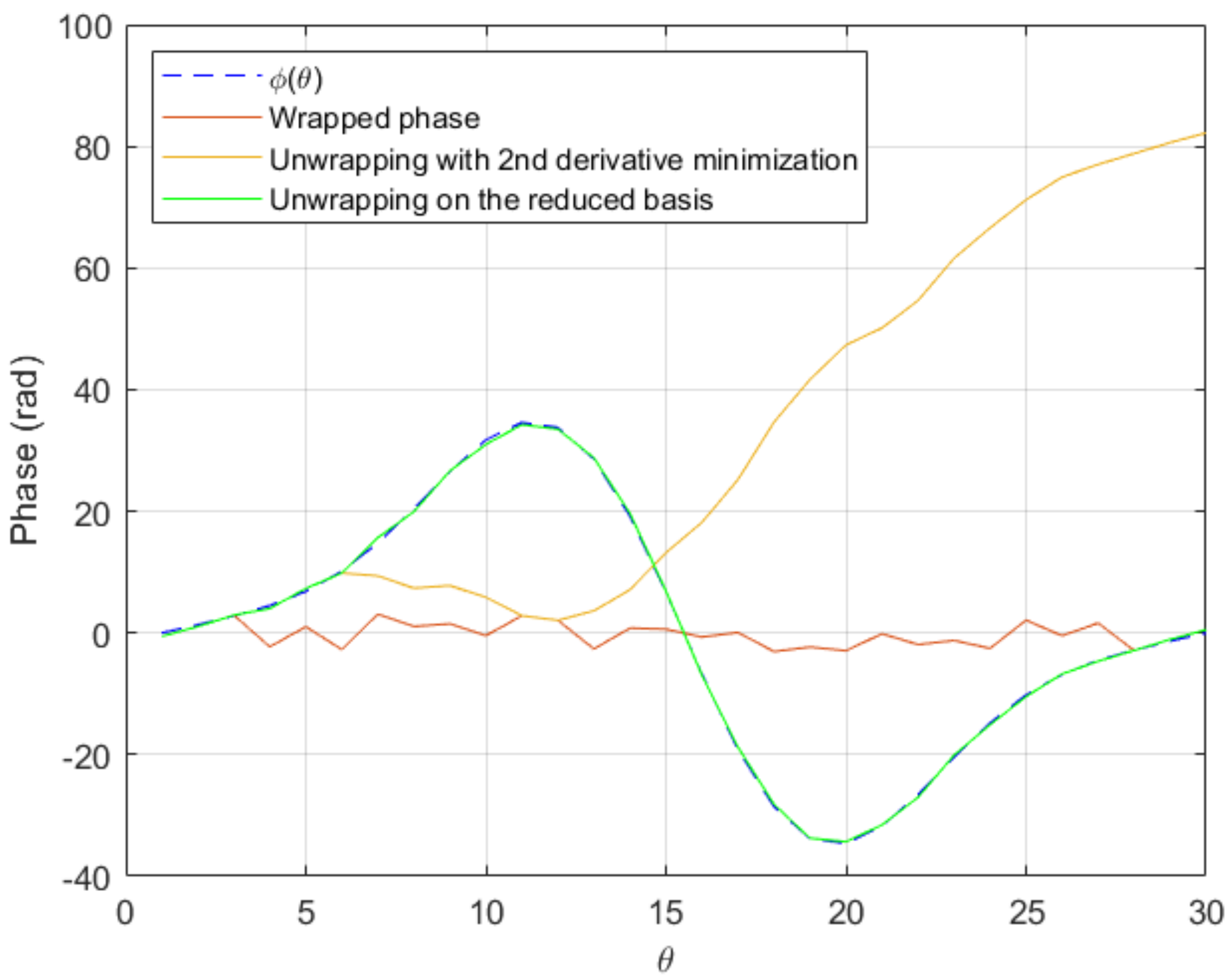
2.4. Comparing the Proposed Algorithm with Traditional Unwrapping
3. Improving the Robustness of Phase Unwrapping
3.1. Reduced Basis of the Search Space
3.2. Phase Unwrapping in the Reduced Search Space
- Using only a few of the raw phase values, generate a discrete subset of the search space which is likely to be close to the optimal solution.
- Fit the rest of the phase values to each curve of this subset by adding or subtracting multiples of .
- Select the configuration which allowed for the best fit.
3.3. Validation of the Optimization Procedure
4. Numerical Results
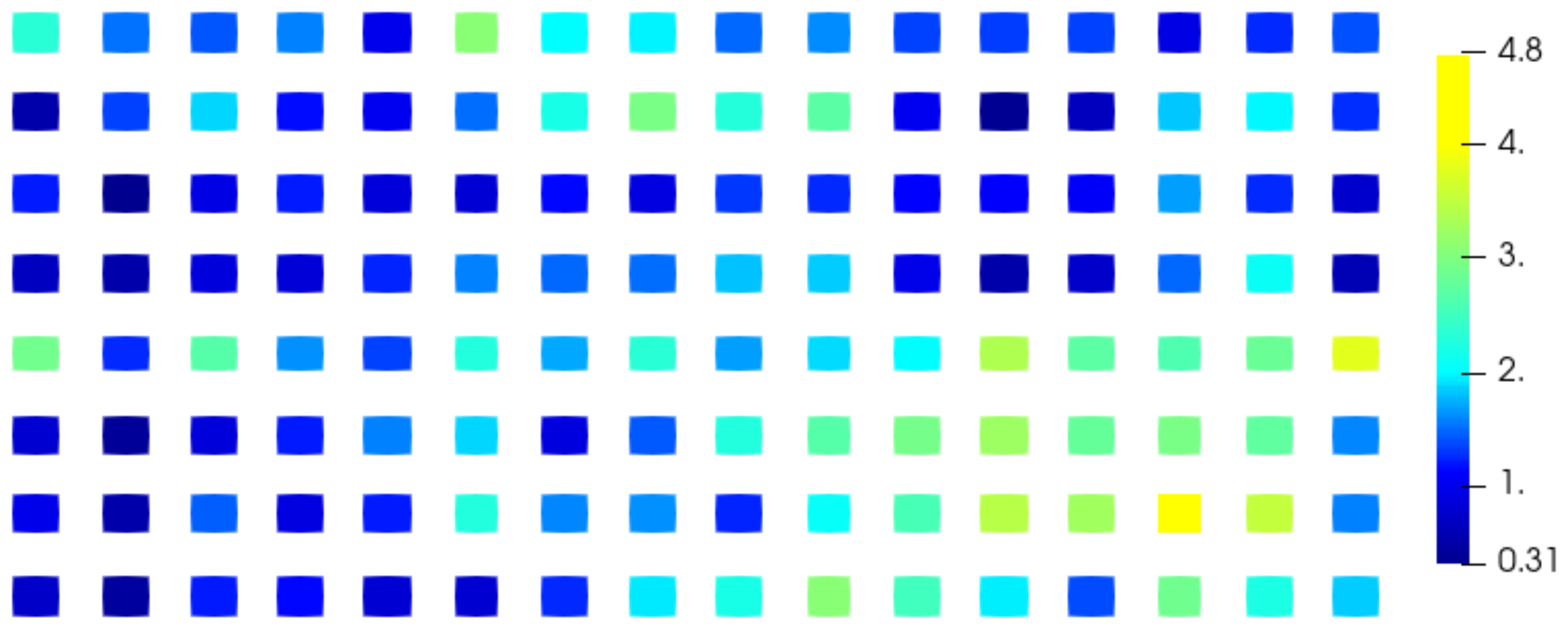
4.1. Convergence Analysis
4.2. Results on the RADAR Problem
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Phase Singularity

Appendix B. Antena Modelling and Simulation

References
- Winner, H. Automotive RADAR. In Handbook of Driver Assistance Systems; Winner, H., Hakuli, S., Lotz, F., Singer, C., Eds.; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Rohling, H. Some radar topics: Waveform design, range cfar and target recognition. In Advances in Sensing with Security Applications; Byrnes, J., Ostheimer, G., Eds.; NATO Security Through Science Series; Springer: Dordrecht, The Netherlands, 2006; Volume 2. [Google Scholar]
- Schnabel, R.; Hellinger, R.; Steinbuch, D.; Selinger, J.; Klar, M.; Lucas, B. Development of a mid range automotive radar sensor for future driver assistance systems. Int. J. Microw. Wirel. Technol. 2013, 5, 15–23. [Google Scholar] [CrossRef]
- Stateczny, A.; Kazimierski, W.; Gronska-Sledz, D.; Motyl, W. The Empirical Application of Automotive 3D Radar Sensor for Target Detection for an Autonomous Surface Vehicles Navigation. Remote Sens. 2019, 11, 1156. [Google Scholar] [CrossRef]
- Steinbaeck, J.; Steger, C.; Holweg, G.; Druml, N. Next generation radar sensors in automotive sensor fusion systems. In Proceedings of the Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 10–12 October 2017; pp. 1–5. [Google Scholar]
- Peng, Z.; Li, C. Portable Microwave Radar Systems for Short-Range Localization and Life Tracking: A Review. Sensors 2019, 19, 1136. [Google Scholar] [CrossRef] [PubMed]
- Cardillo, E.; Caddemi, A. Feasibility Study to Preserve the Health of an Industry 4.0 Worker: A Radar System for Monitoring the Sitting-Time. In Proceedings of the 2019 II Workshop on Metrology for Industry 4.0 and IoT (MetroInd4.0&IoT), Naples, Italy, 4–6 June 2019; pp. 254–258. [Google Scholar] [CrossRef]
- Cardillo, E.; Caddemi, A. Insight on Electronic Travel Aids for Visually Impaired People: A Review on the Electromagnetic Technology. Electronics 2019, 8, 1281. [Google Scholar] [CrossRef]
- Gao, X.; Shahhaidar, E.; Stickley, C.; Boric-Lubecke, O. Respiratory Angle of Thoracic Wall Movement During Lung Ventilation. IEEE Sens. J. 2016, 16, 5195–5201. [Google Scholar] [CrossRef]
- Islam, S.M.M.; Boric-Lubecke, O.; Zheng, Y.; Lubecke, V.M. Radar-Based Non-Contact Continuous Identity Authentication. Remote Sens. 2020, 12, 2279. [Google Scholar] [CrossRef]
- Rodriguez, D.; Li, C. Sensitivity and Distortion Analysis of a 125-GHz Interferometry Radar for Submicrometer Motion Sensing Applications. IEEE Trans. Microw. Theory Tech. 2019, 67, 5384–5395. [Google Scholar] [CrossRef]
- Bloecher, H.L.; Andres, M.; Fischer, C.; Sailer, A.; Goppelt, M.; Dickmann, J. Impact of system parameter selection on radar sensor performance in automotive applications. Adv. Radio Sci. 2012, 10, 33–37. [Google Scholar] [CrossRef]
- Buitrago, S.; Boris, S.B.; Romeu, J. Imaging System for Automotive Radome Characterization. In Proceedings of the 13th European Conference on Antennas and Propagation (EuCAP), Krakow, Poland, 31 March 2019; pp. 1–5. [Google Scholar]
- Harter, M.; Hildebrandt, J.; Ziroff, A.; Zwick, T. Self-Calibration of a 3-D-Digital Beamforming Radar System for Automotive Applications with Installation Behind Automotive Covers. IEEE Trans. Microw. Theory Tech. 2016, 64, 2994–3000. [Google Scholar] [CrossRef]
- Norouzian, F. Signal reduction due to radome contamination in low-THz automotive radar. In Proceedings of the 2016 IEEE Radar Conference, Philadelphia, PA, USA, 2–6 May 2016; pp. 1–4. [Google Scholar]
- Pfeiffer, F.; Biebl, E.M. Inductive Compensation of High-Permittivity Coatings on Automobile Long-Range Radar Radomes. IEEE Trans. Microw. Theory Tech. 2009, 57, 2627–2632. [Google Scholar] [CrossRef]
- Vasanelli, C.; Batra, R.; Waldschmidt, C. Optimization of a MIMO radar antenna system for automotive applications. In Proceedings of the 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017; pp. 1113–1117. [Google Scholar]
- Ladevèze, P. The large time increment method for the analyze of structures with nonlinear constitutive relation described by internal variables. C. R. Acad. Sci. Paris 1989, 309, 1095–1099. [Google Scholar]
- Ladeveze, P.; Arnaud, L.; Rouch, P.; Blanze, C. The variational theory of complex rays for the calculation of medium-frequency vibrations. Eng. Comput. 1999, 18, 193–214. [Google Scholar] [CrossRef]
- Modesto, D.; Zlotnik, S.; Huerta, A. Proper generalized decomposition for parameterized Helmholtz problems in heterogeneous and unbounded domains: Application to harbor agitation. Comput. Methods Appl. Mech. Eng. 2015, 295, 127–149. [Google Scholar] [CrossRef]
- Amsallem, D.; Farhat, C. Interpolation Method for Adapting Reduced-Order Models and Application to Aeroelasticity. AIAA J. 2008, 46, 1803–1813. [Google Scholar] [CrossRef]
- Borzacchiello, D.; Aguado, J.V.; Chinesta, F. Non-intrusive sparse subspace learning for parametrized problems. Arch. Comput. Methods Eng. 2019, 26, 303–326. [Google Scholar] [CrossRef]
- Chkifa, A.; Cohen, A.; Schwab, C. High-Dimensional Adaptive Sparse Polynomial Interpolation and Applications to Parametric PDEs. Found Comput. Math. 2014, 14, 601–633. [Google Scholar] [CrossRef]
- Ibanez, R.; Abisset-Chavanne, E.; Ammar, A.; Gonzalez, D.; Cueto, E.; Huerta, A.; Duval, J.L.; Chinesta, F. A multi-dimensional data-driven sparse identification technique: The sparse Proper Generalized Decomposition. Complexity 2018, 5608286. [Google Scholar] [CrossRef]
- Abdallah, W.B.; Abdelfattah, R. A generalized form of the InSAR phase unwrapping problem based on a compressed sensing technique. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 3225–3229. [Google Scholar]
- Costantini, M.; Malvarosa, F.; Minati, F. A general formulation for redundant integration of finite differences and phase unwrapping on a sparse multidimensional domain. IEEE Trans. Geosci. Remote Sens. 2012, 50, 758–768. [Google Scholar] [CrossRef]
- Shanker, A.P.; Zebker, H. Edgelist phase unwrapping algorithm for time series InSAR analysis. J. Opt. Soc. Am. A 2010, 27, 605–612. [Google Scholar] [CrossRef] [PubMed]
- Chinesta, F.; Huerta, A.; Rozza, G.; Willcox, K. Model Order Reduction. Chapter in the Encyclopedia of Computational Mechanics, 2nd ed.; Stein, E., de Borst, R., Hughes, T., Eds.; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2015. [Google Scholar]
- Chinesta, F.; Leygue, A.; Bordeu, F.; Aguado, J.V.; Cueto, E.; Gonzalez, D.; Alfaro, I.; Ammar, A.; Huerta, A. Parametric PGD based computational vademecum for efficient design, optimization and control. Arch. Comput. Methods Eng. 2013, 20, 31–59. [Google Scholar] [CrossRef]
- unwrap. Shift Phase Angles. Available online: https://fr.mathworks.com/help/matlab/ref/unwrap.html (accessed on 30 September 2020).












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vermiglio, S.; Champaney, V.; Sancarlos, A.; Daim, F.; Kedzia, J.C.; Duval, J.L.; Diez, P.; Chinesta, F. Parametric Electromagnetic Analysis of Radar-Based Advanced Driver Assistant Systems. Sensors 2020, 20, 5686. https://doi.org/10.3390/s20195686
Vermiglio S, Champaney V, Sancarlos A, Daim F, Kedzia JC, Duval JL, Diez P, Chinesta F. Parametric Electromagnetic Analysis of Radar-Based Advanced Driver Assistant Systems. Sensors. 2020; 20(19):5686. https://doi.org/10.3390/s20195686
Chicago/Turabian StyleVermiglio, Simona, Victor Champaney, Abel Sancarlos, Fatima Daim, Jean Claude Kedzia, Jean Louis Duval, Pedro Diez, and Francisco Chinesta. 2020. "Parametric Electromagnetic Analysis of Radar-Based Advanced Driver Assistant Systems" Sensors 20, no. 19: 5686. https://doi.org/10.3390/s20195686
APA StyleVermiglio, S., Champaney, V., Sancarlos, A., Daim, F., Kedzia, J. C., Duval, J. L., Diez, P., & Chinesta, F. (2020). Parametric Electromagnetic Analysis of Radar-Based Advanced Driver Assistant Systems. Sensors, 20(19), 5686. https://doi.org/10.3390/s20195686