An Attitude Prediction Method for Autonomous Recovery Operation of Unmanned Surface Vehicle

Abstract
1. Introduction
2. Launch and Recovery System
2.1. Mechanism
- First, by automatic regulation of the pitching and rotation joints of the stabilized platform mechanism, the launching mechanism is aimed to the mother ship’s deck (Figure 2a).
- After the launching switch was acted, the air projectile was separated from the catapult mechanism and was driven by the high-pressure gas. It drives the guide rope to drop on the mother ship’s deck (Figure 2b).
- Then, the mother ship’s crew passes the guide rope through the hole of the conical butt joint, and the conical butt joint slides along with the guide rope into the docking mechanism (Figure 2c).
- Finally, the docking mechanism locks the conical butt joint, and the USV is lifted from the sea surface by the davit (Figure 2d).
2.2. Launching Angle
3. USV Attitude Prediction
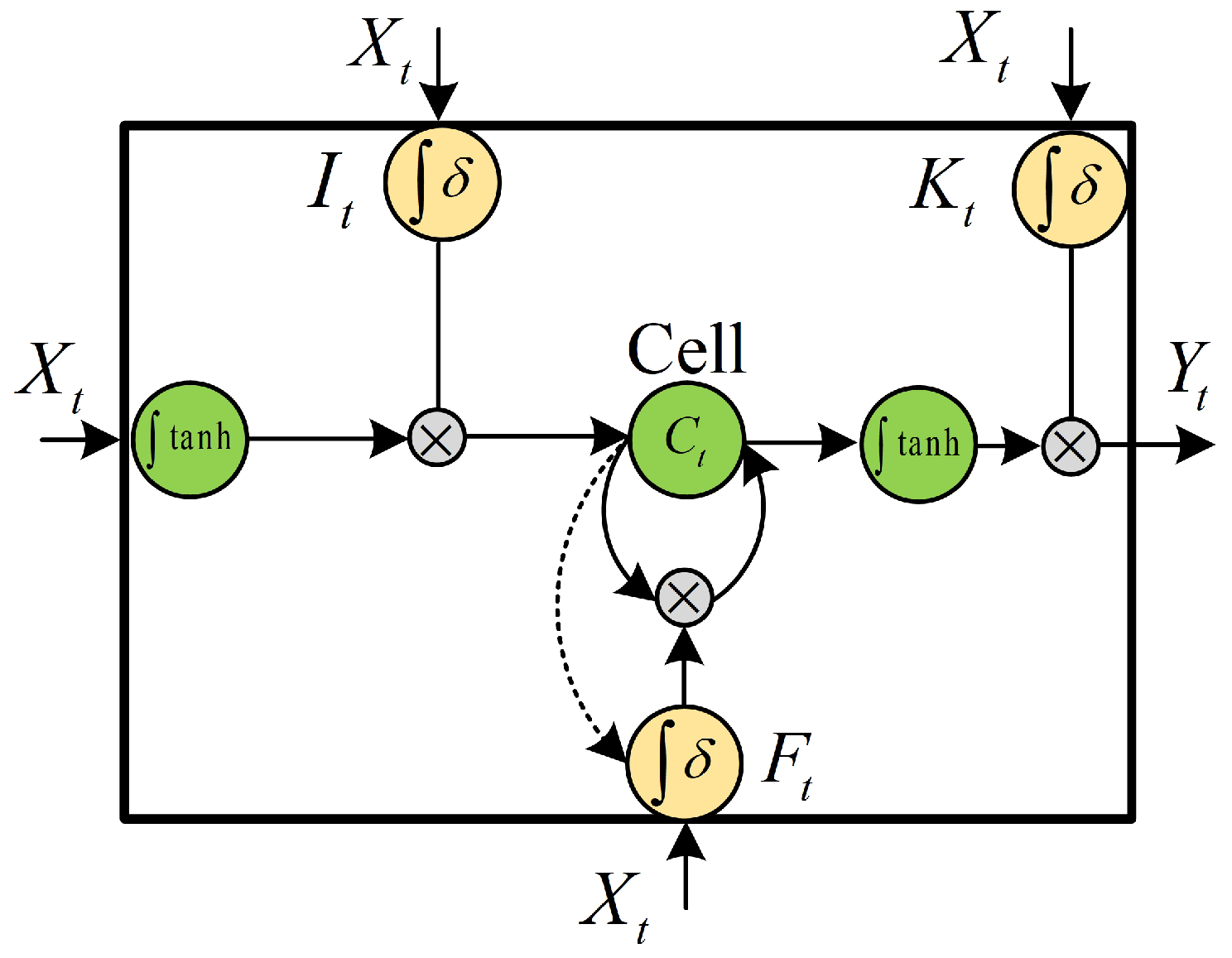
3.1. LSTM Neural Network
3.2. One-Dimensional Convolutional Neural Network
3.3. USV Attitude Data
3.4. Determination of Hyper-Parameters
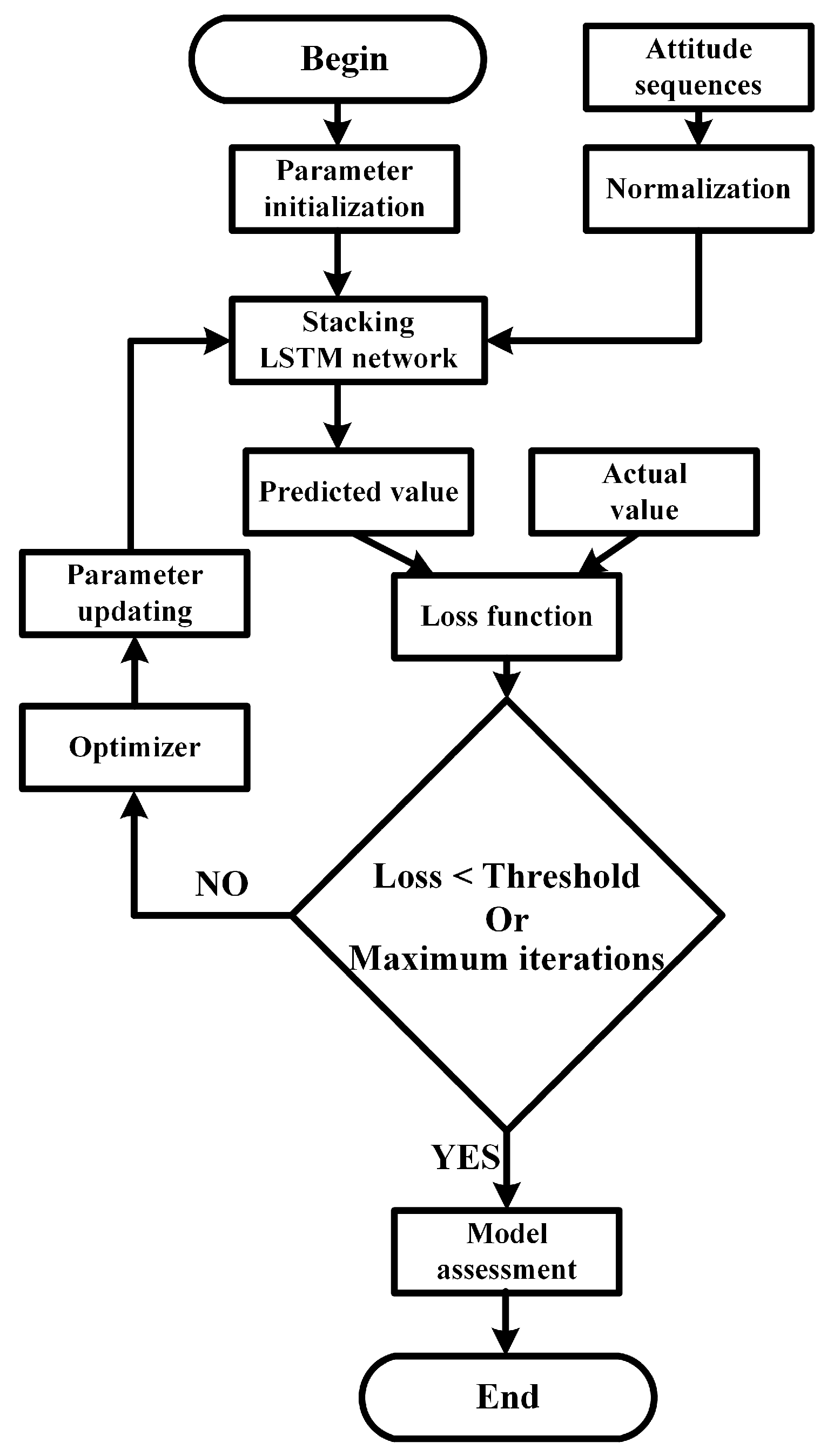
3.5. Training Process
4. Experiments and Discussion
4.1. Experimental Overview
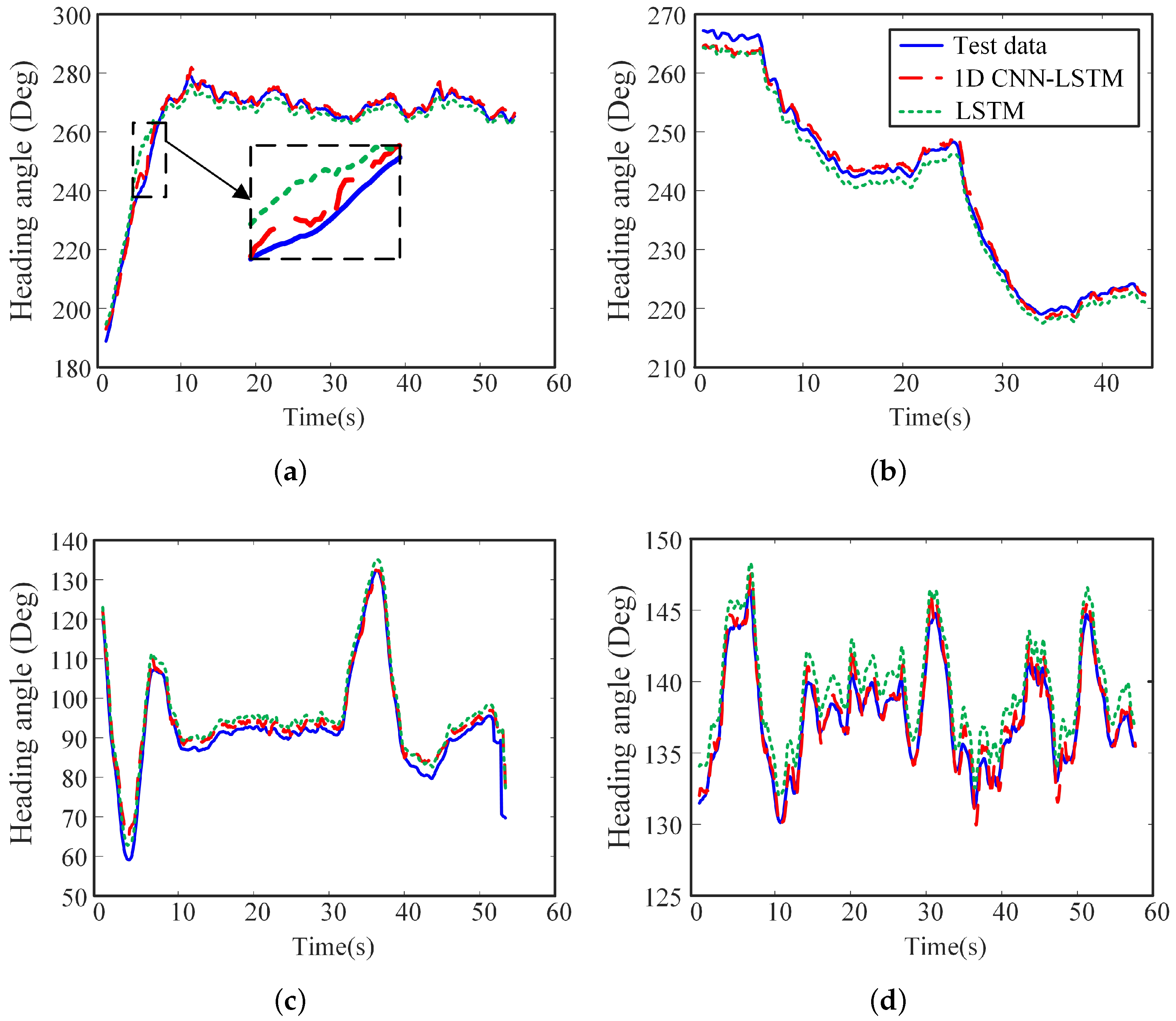
4.2. Results and Discussion
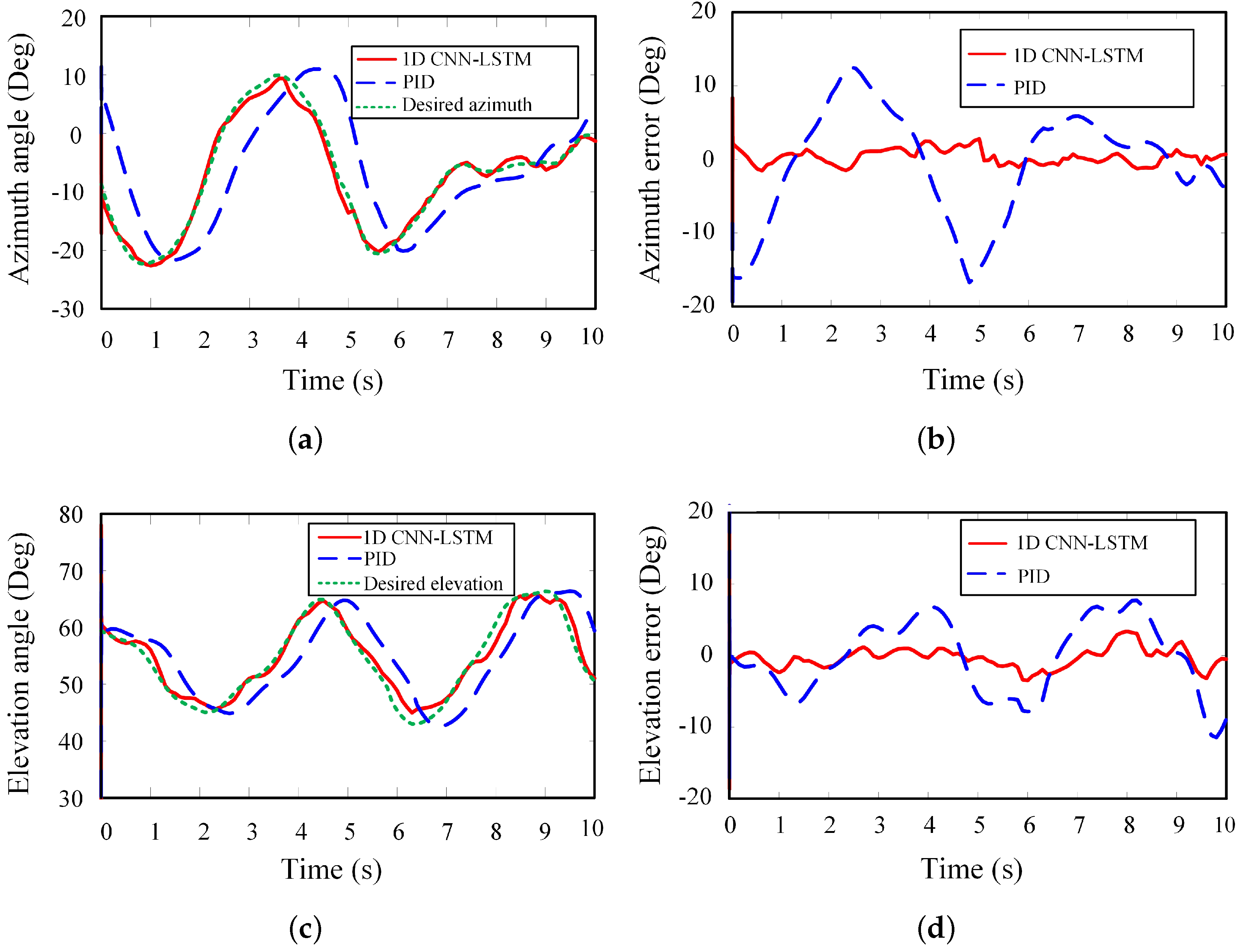
4.3. Field Application
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Furfaro, T.C.; Dusek, J.; Von Ellenrieder, K.D. Design, construction, and initial testing of an autonomous surface vehicle for riverine and coastal reconnaissance. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–6. [Google Scholar]
- Breivik, M.; Hovstein, V.E.; Fossen, T.I. Straight-Line target tracking for unmanned surface vehicles. Model. Identif. Control 2008, 29, 131–149. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Yang, W.; Chen, C.; Hsu, C.; Tseng, C.; Yang, W. Multifunctional inshore survey platform with unmanned surface vehicles. Int. J. Autom. Smart Technol. 2011, 1, 19–25. [Google Scholar] [CrossRef]
- Sonnenburg, C.; Woolsey, C.A. Modeling, identification, and control of an unmanned surface vehicle. J. Field Robot. 2013, 30, 371–398. [Google Scholar] [CrossRef]
- Fisher, N.; Gilbert, G.R. Unmanned systems in support of future medical operations in dense urban environments. J. Article 2016, 4, 48pm. [Google Scholar]
- Kern, F.R. Launch and Recovery Devices for Water Vehicles and Methods of Use. U.S. Patent 7,581,507, 19 February 2009. [Google Scholar]
- Hayashi, E.; Kimura, H.; Tam, C.; Ferguson, J.; Laframboise, J.; Miller, G.; Kaminski, C.; Johnson, A. Customizing an autonomous underwater vehicle and developing a launch and recovery system. In Proceedings of the 2013 IEEE International Underwater Technology Symposium (UT), Tokyo, Japan, 5–8 March 2013; pp. 1–7. [Google Scholar]
- Wu, G.X.; Xie, Y.; Sun, H.b.; Zou, J. Modeling and simulation of capsizing automatic recovery system for unmanned surface vehicle. J. Syst. Simul. 2009, 21. [Google Scholar]
- Bergmann, H.D. Device for a Watercraft for Picking up and Launching Boats. U.S. Patent 7,815,394, 19 October 2010. [Google Scholar]
- Peng, X.; Zhao, X.; Xu, L. Real-time prediction algorithm research of ship attitude motion based on order selection with corner condition. In Proceedings of the 2006 1st International Symposium on Systems and Control in Aerospace and Astronautics, Harbin, China, 19–21 January 2006; IEEE: Piscataway, NJ, USA, 2006; p. 6. [Google Scholar]
- Norbert, W. Interpolation and Smoothing of Stationary Time Series; Wiely: New York, NY, USA, 1949. [Google Scholar]
- Bates, M.R.; Bock, D.; Powell, F. Analog computer applications in predictor design. IRE Trans. Electron. Comput. 1957, EC-6, 143–153. [Google Scholar] [CrossRef]
- Sidar, M.; Doolin, B. On the feasibility of real-time prediction of aircraft carrier motion at sea. IEEE Trans. Autom. Control 1983, 28, 350–356. [Google Scholar] [CrossRef]
- Peng, X.Y.; Zhao, X.R.; Gao, Q.F. Research on real-time prediction algorithm of ship attitude motion. J. Syst. Simul. 2007, 19, 267–271. [Google Scholar]
- Khan, A.; Bil, C.; Marion, K.; Crozier, M. Real time prediction of ship motions and attitudes using advanced prediction techniques. In Proceedings of the Congress of the International Council of the Aeronautical Sciences, International Council of the Aeronautical Sciences, Yokohama, Japan, 29 August–3 September 2004. [Google Scholar]
- Zheng, S.; Yang, Y.; Peng, Y.; Cui, J.; Chen, J.; Jiang, X.; Feng, Y. An automated launch and recovery system for USVs based on the pneumatic ejection mechanism. In Proceedings of the International Conference on Intelligent Robotics and Applications, Shenyang, China, 8–11 August 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 289–300. [Google Scholar]
- Qian, X.; Yin, Y.; Zhang, X.; Li, Y. Influence of irregular disturbance of sea wave on ship motion. J. Traff. Transp. Eng. China 2016, 16, 116–124. [Google Scholar]
- Hu, H.; Zhao, Y.; Guo, Y.; Zheng, M. Analysis of linear resisted projectile motion using the Lambert W function. Acta Mech. 2012, 223, 441–447. [Google Scholar] [CrossRef]
- Ma, C.; Wang, A.; Chen, G.; Xu, C. Hand joints-based gesture recognition for noisy dataset using nested interval unscented Kalman filter with LSTM network. Vis. Comput. 2018, 34, 1053–1063. [Google Scholar] [CrossRef]
- Yang, B.; Sun, S.; Li, J.; Lin, X.; Tian, Y. Traffic flow prediction using LSTM with feature enhancement. Neurocomputing 2019, 332, 320–327. [Google Scholar] [CrossRef]
- Pan, H.; He, X.; Tang, S.; Meng, F. An improved bearing fault diagnosis method using one-dimensional CNN and LSTM. J. Mech. Eng 2018, 64, 443–452. [Google Scholar]
- Nguyen, T.D.; Sørensen, A.J.; Quek, S.T. Design of hybrid controller for dynamic positioning from calm to extreme sea conditions. Automatica 2007, 43, 768–785. [Google Scholar] [CrossRef]
- Price, W.G. Probabilistic Theory of Ship Dynamics; Printed in the United Kingdom; Chapman & Hall Ltd.: London, UK, 1974; ISBN 0 412 12430 0. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Unit |
|---|---|---|
| Length | 8.2 | m |
| Width | 2.45 | m |
| Height | 1.84 | m |
| Mass | 3000 | kg |
| Depth of immersion | 0.5 | m |
| Sea Condition Level | Sea States | Significant Wave Height (m) |
|---|---|---|
| 0 | Calm (glassy) | 0 |
| 1 | Calm (ripples) | 0–0.1 |
| 2 | Smooth (wavelets) | 0.1–0.5 |
| 3 | Slight | 0.5–1.25 |
| 4 | Moderate | 1.25–2.5 |
| 5 | Rough | 2.5–4.0 |
| 6 | Very rough | 4.0–6.0 |
| 7 | High | 6.0–9.0 |
| 8 | Very high | 9.0–14.0 |
| 9 | Phenomenal (Extreme) | Over 14.0 |
| Sea Condition | Network Model | Training Speed (ms/step) | Training Loss | Validation Loss | Test Loss |
|---|---|---|---|---|---|
| Level 1 | LSTM | 22 | 0.1013 | 0.1232 | 0.0511 |
| 1D CNN-LSTM | 12 | 0.0289 | 0.0128 | 0.0212 | |
| NARX | 16 | 0.0301 | 0.0120 | 0.0222 | |
| TDNN | 13 | 0.0247 | 0.0416 | 0.0283 | |
| Level 2 | LSTM | 20 | 0.0402 | 0.0264 | 0.0240 |
| 1D CNN-LSTM | 14 | 0.0284 | 0.0201 | 0.0132 | |
| NARX | 17 | 0.0308 | 0.0244 | 0.0232 | |
| TDNN | 14 | 0.0222 | 0.0188 | 0.0216 | |
| Level 3 | LSTM | 20 | 0.0309 | 0.0107 | 0.0310 |
| 1D CNN-LSTM | 15 | 0.0279 | 0.0211 | 0.0218 | |
| NARX | 18 | 0.0305 | 0.0186 | 0.0261 | |
| TDNN | 14 | 0.0212 | 0.0221 | 0.0308 | |
| Level 4 | LSTM | 21 | 0.0765 | 0.0461 | 0.0381 |
| 1D CNN-LSTM | 15 | 0.0415 | 0.0125 | 0.0133 | |
| NARX | 19 | 0.0377 | 0.0239 | 0.0141 | |
| TDNN | 16 | 0.0286 | 0.0232 | 0.0179 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Pan, P.; Jiang, X.; Zheng, S.; Zhao, Y.; Yang, Y.; Zhong, S.; Peng, Y. An Attitude Prediction Method for Autonomous Recovery Operation of Unmanned Surface Vehicle. Sensors 2020, 20, 5662. https://doi.org/10.3390/s20195662
Yang Y, Pan P, Jiang X, Zheng S, Zhao Y, Yang Y, Zhong S, Peng Y. An Attitude Prediction Method for Autonomous Recovery Operation of Unmanned Surface Vehicle. Sensors. 2020; 20(19):5662. https://doi.org/10.3390/s20195662
Chicago/Turabian StyleYang, Yang, Ping Pan, Xingang Jiang, Shuanghua Zheng, Yongjian Zhao, Yi Yang, Songyi Zhong, and Yan Peng. 2020. "An Attitude Prediction Method for Autonomous Recovery Operation of Unmanned Surface Vehicle" Sensors 20, no. 19: 5662. https://doi.org/10.3390/s20195662
APA StyleYang, Y., Pan, P., Jiang, X., Zheng, S., Zhao, Y., Yang, Y., Zhong, S., & Peng, Y. (2020). An Attitude Prediction Method for Autonomous Recovery Operation of Unmanned Surface Vehicle. Sensors, 20(19), 5662. https://doi.org/10.3390/s20195662