A Data Fusion Orientation Algorithm Based on the Weighted Histogram Statistics for Vector Hydrophone Vertical Array



Abstract
1. Introduction
2. Basic Theory
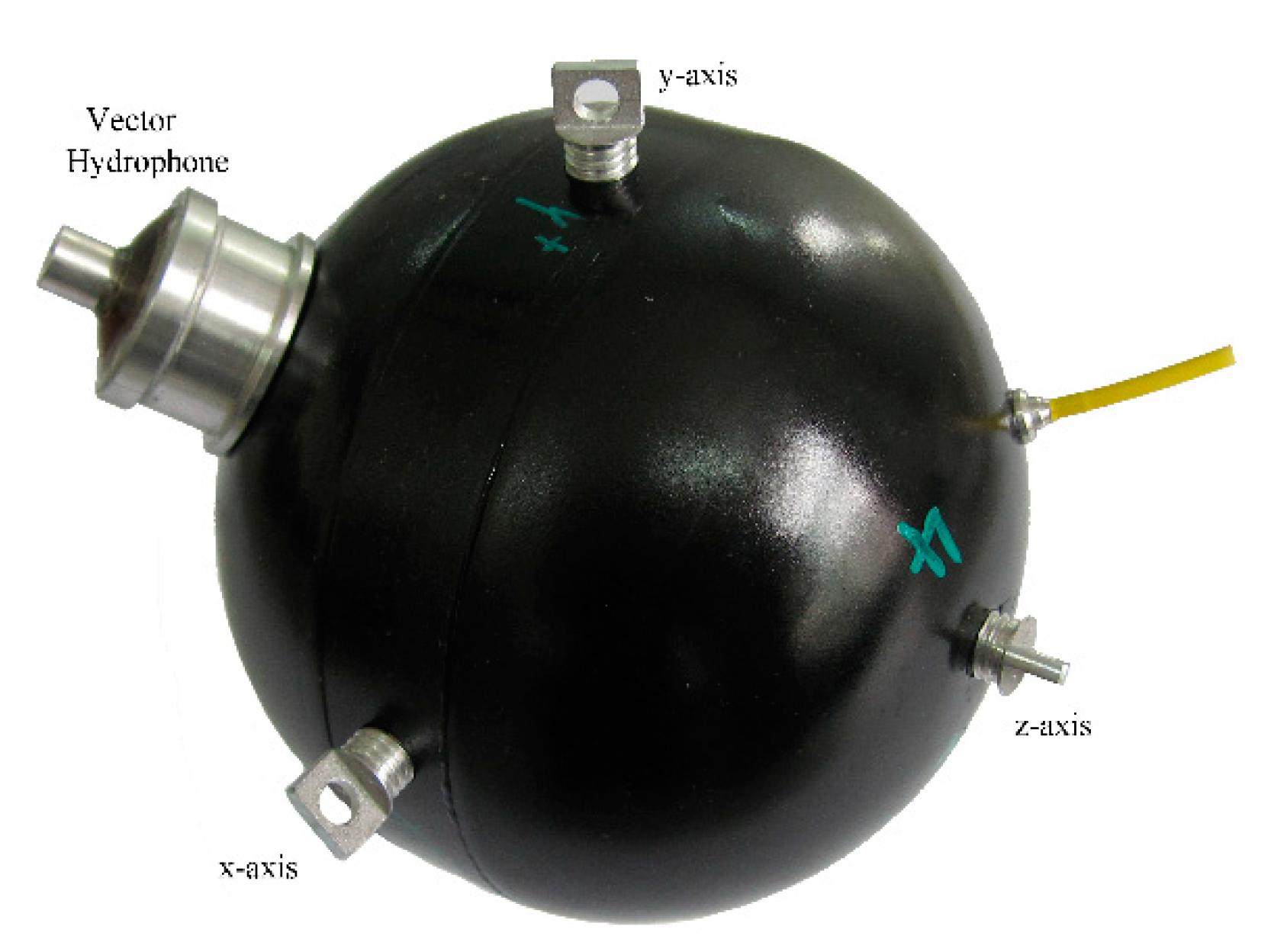
2.1. Principle of the Vector Hydrophone
2.2. Receiving Model of a Single Vector Hydrophone
2.3. Horizontal Directivity Index of the Vector Hydrophone Vertical Array
2.4. Cross-Spectrum Sound Intensity Method
2.5. MUSIC Algorithm of a Single Vector Hydrophone
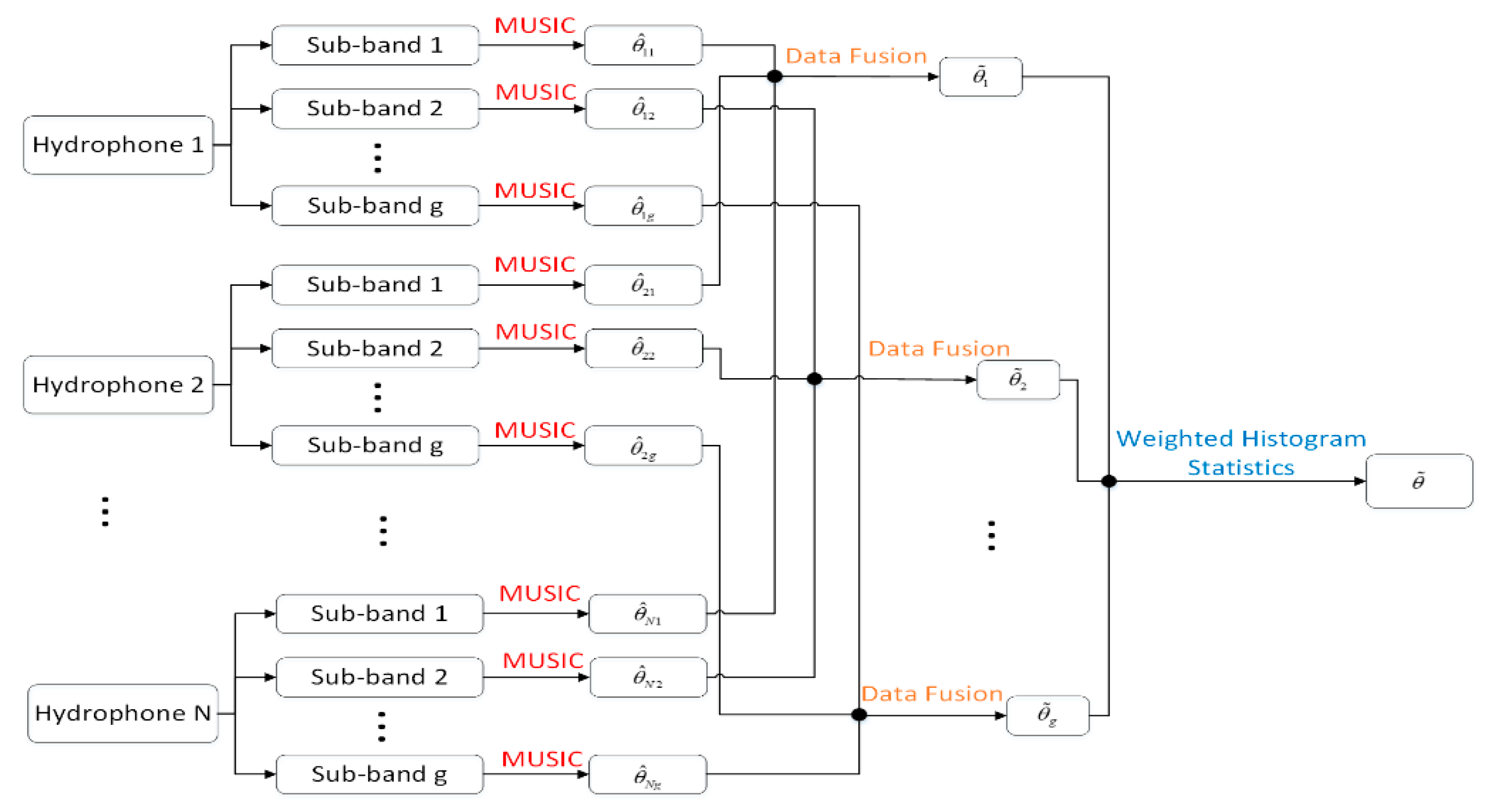
2.6. Data Fusion Orientation Algorithm Based on Weighted Histogram Statistics
3. Simulation
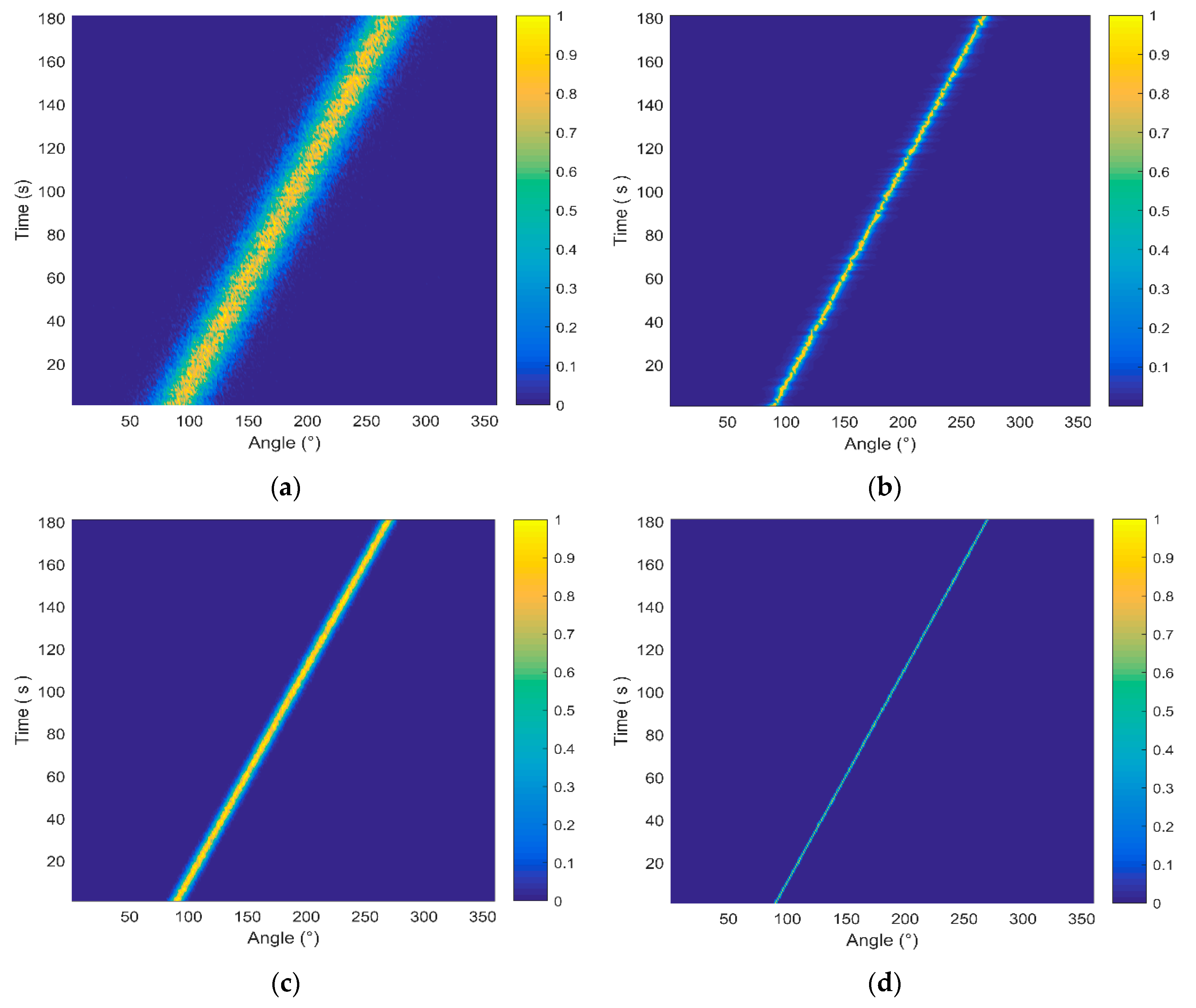
3.1. High SNR Condition
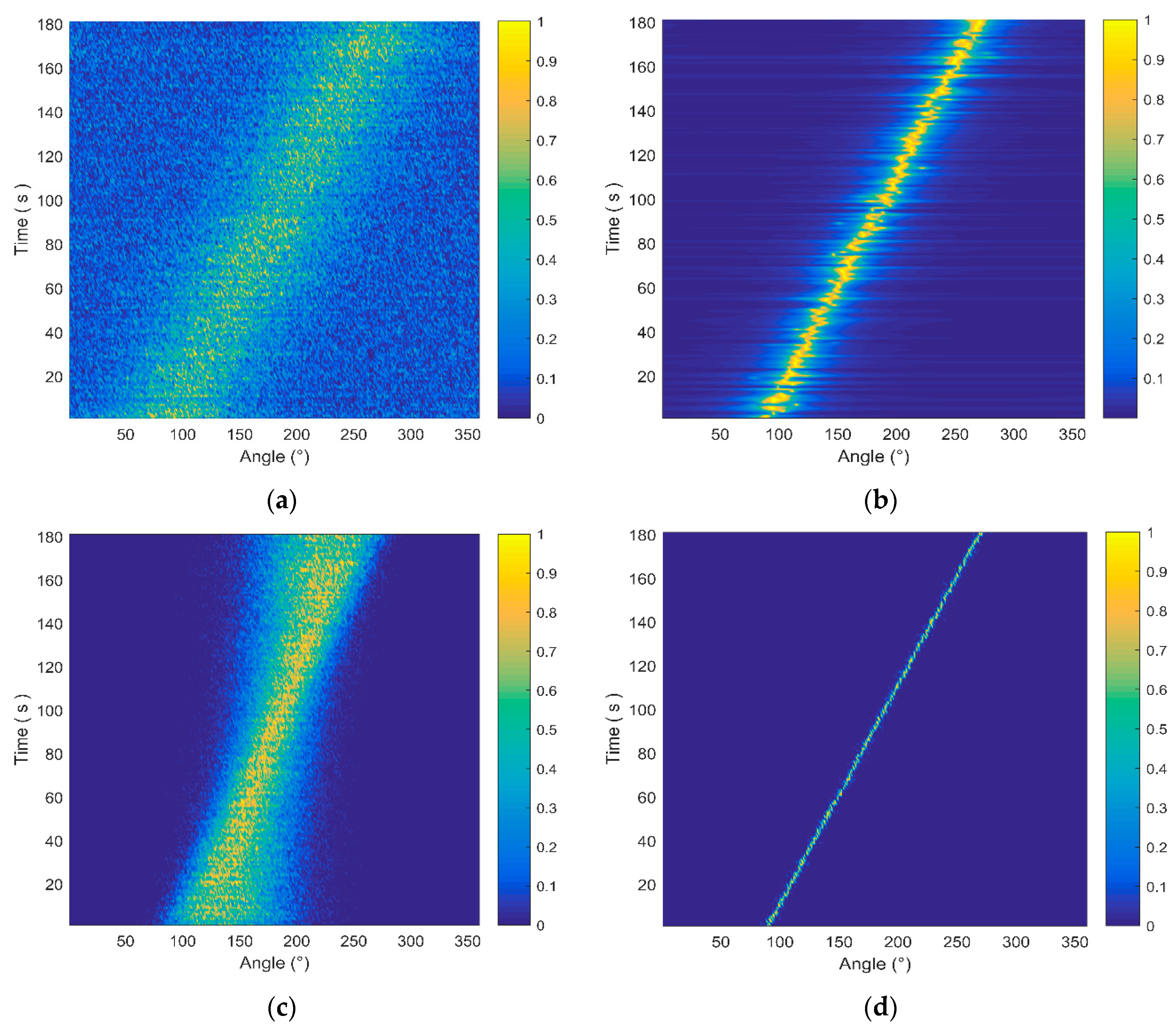
3.2. Influence of the Noise-Dominated Sub-Bands
4. Experimental Analysis
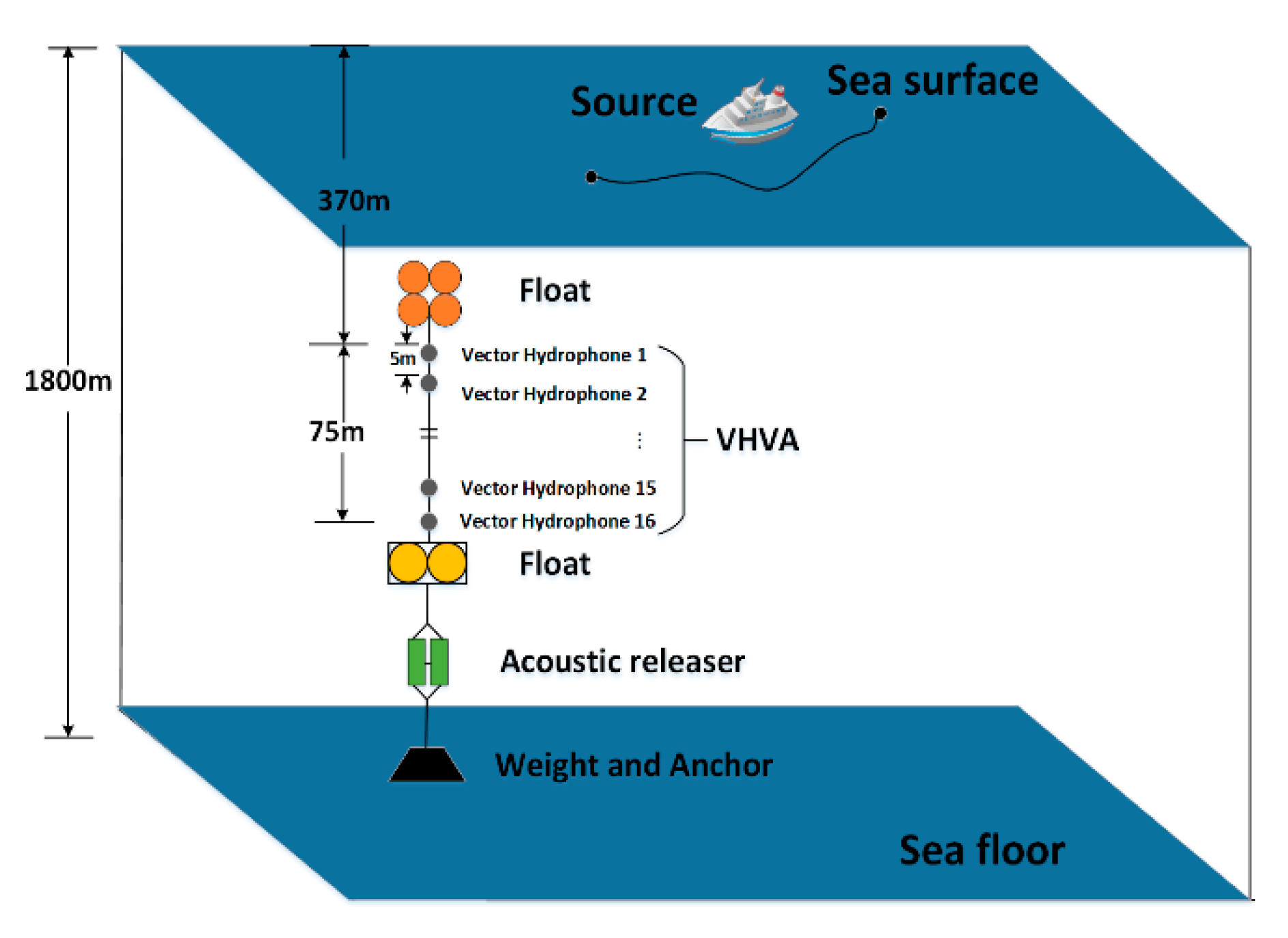
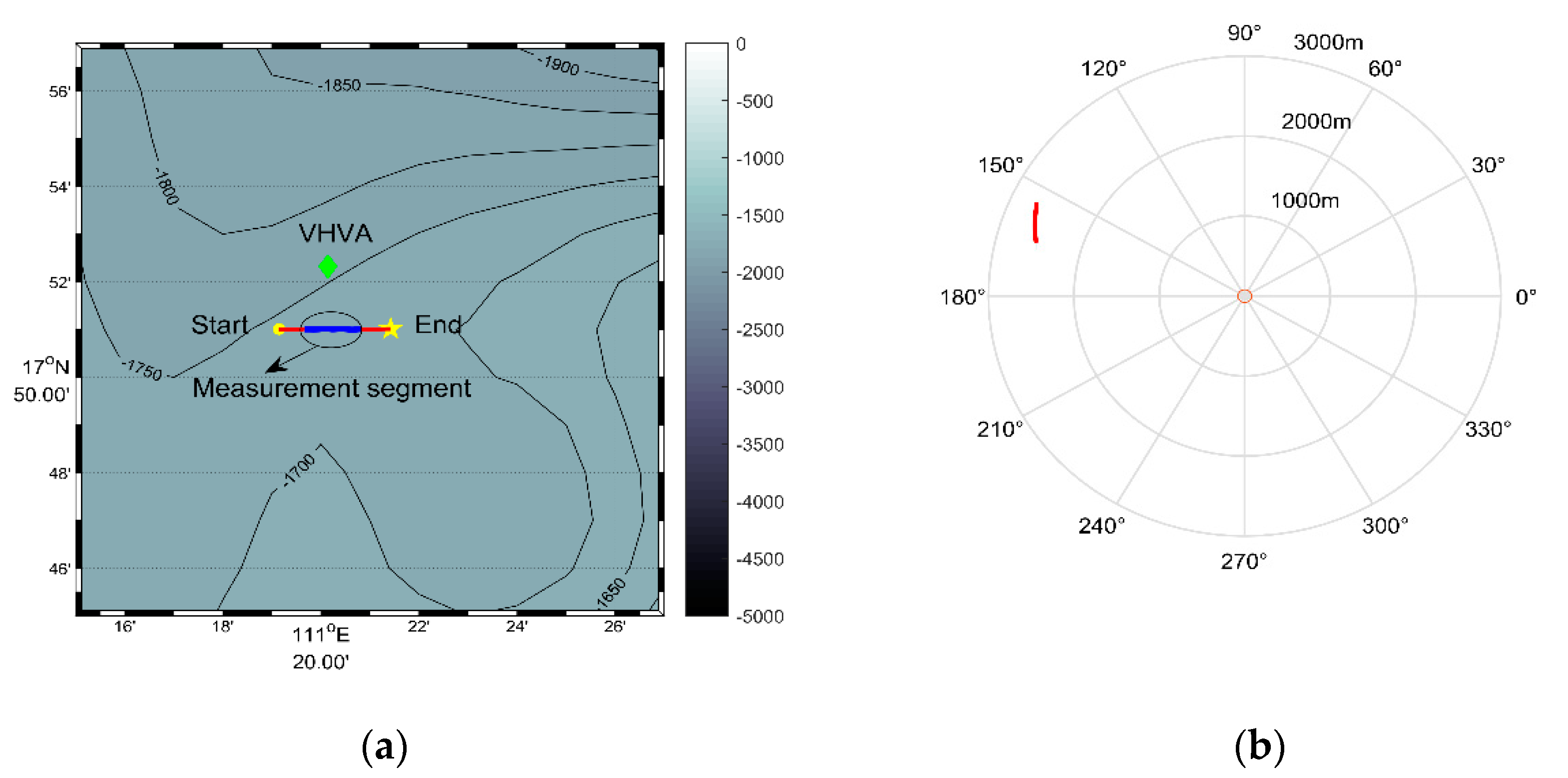
4.1. Experiment Introduction
- The vector hydrophone vertical array was composed of 16 elements with an interval of 5 m. The top hydrophone was placed at a depth of 370 m, and the bottom hydrophone was at about 445 m. The water depth of the experimental area was about 1800 m.
- The vector hydrophone is composed of a pressure hydrophone and a three-dimensional accelerometer, which collect the pressure and acceleration of ship noise, respectively. Then, the acceleration is converted into velocity by integration.
- The vector hydrophone had a sound pressure sensitivity of –144.3 dB per and acceleration sensitivity of 32.6 dB per .
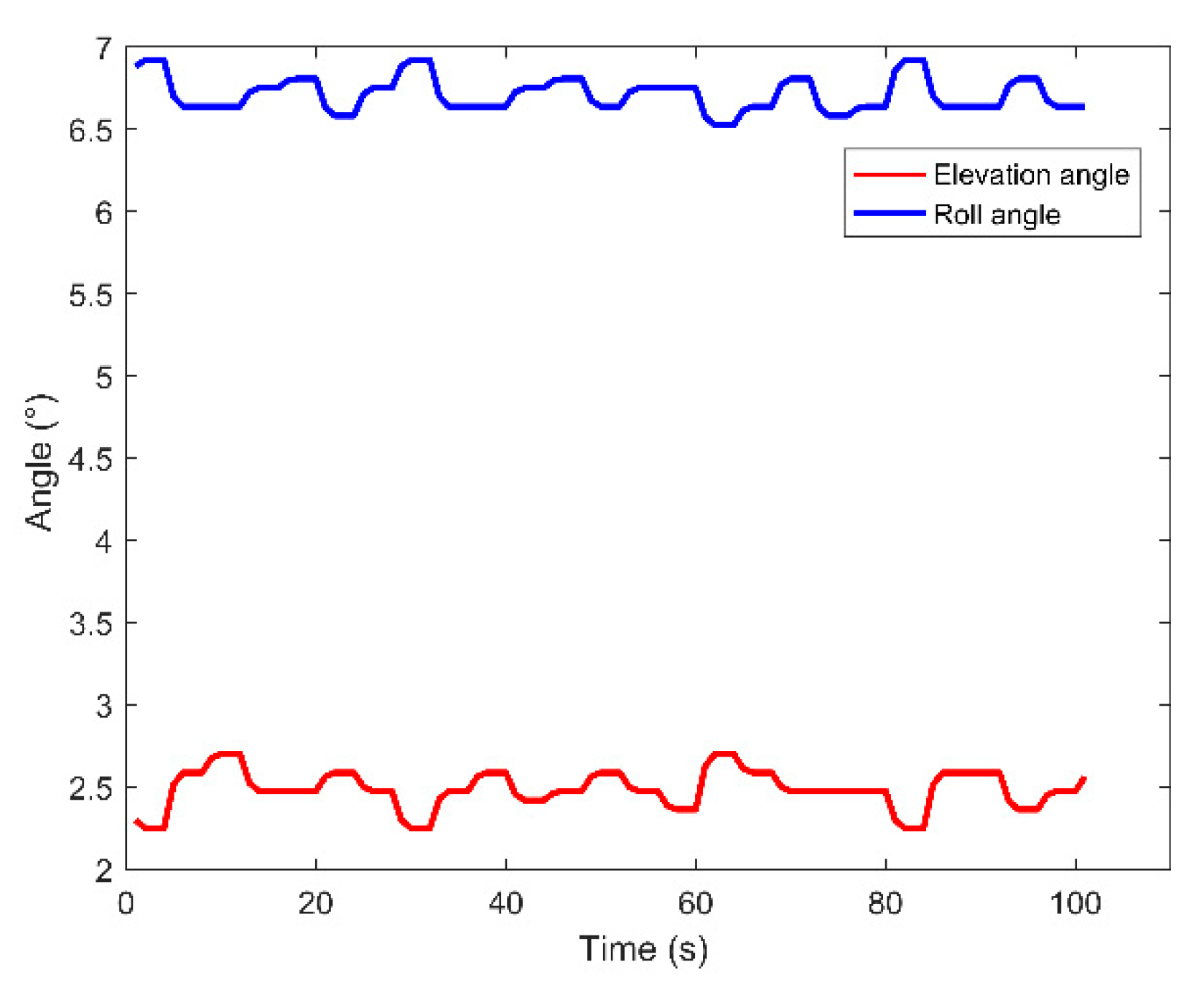
- A 100 s signal was chosen from the whole measurement as the processing data. The array tilted due to the disturbance of ocean currents. The tilt degree of the elevation angle and roll angle during the 100 s processing time is presented in Figure 11. The attitude of each vector hydrophone was modified according to the electronic compass data when processing the received data.
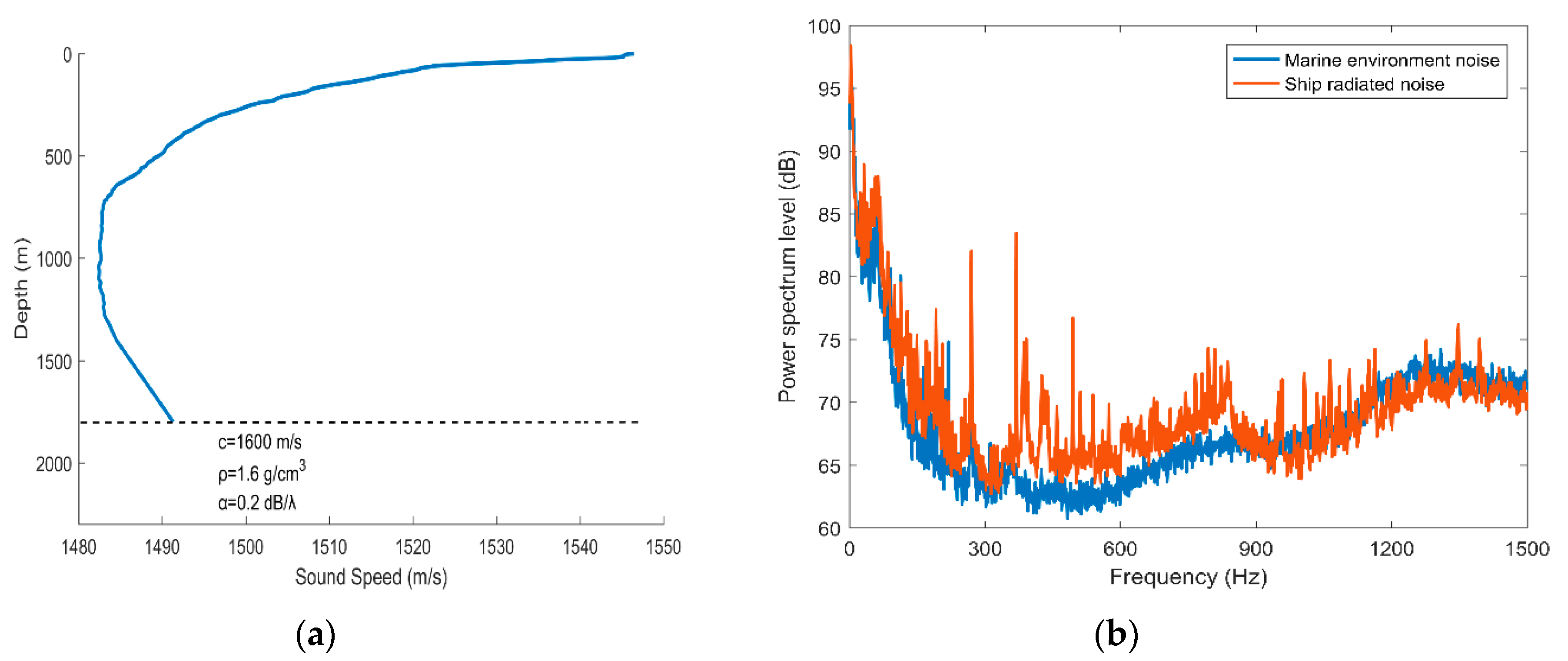
- The sound velocity profiler (SVP) was used to measure the sound speed profile (SSP) at the beginning of the experiments. The measured SSP is shown in Figure 13a.
- The sampling rate was 16 kHz. The sea condition was level 3, and no other vessels passed during the test time.
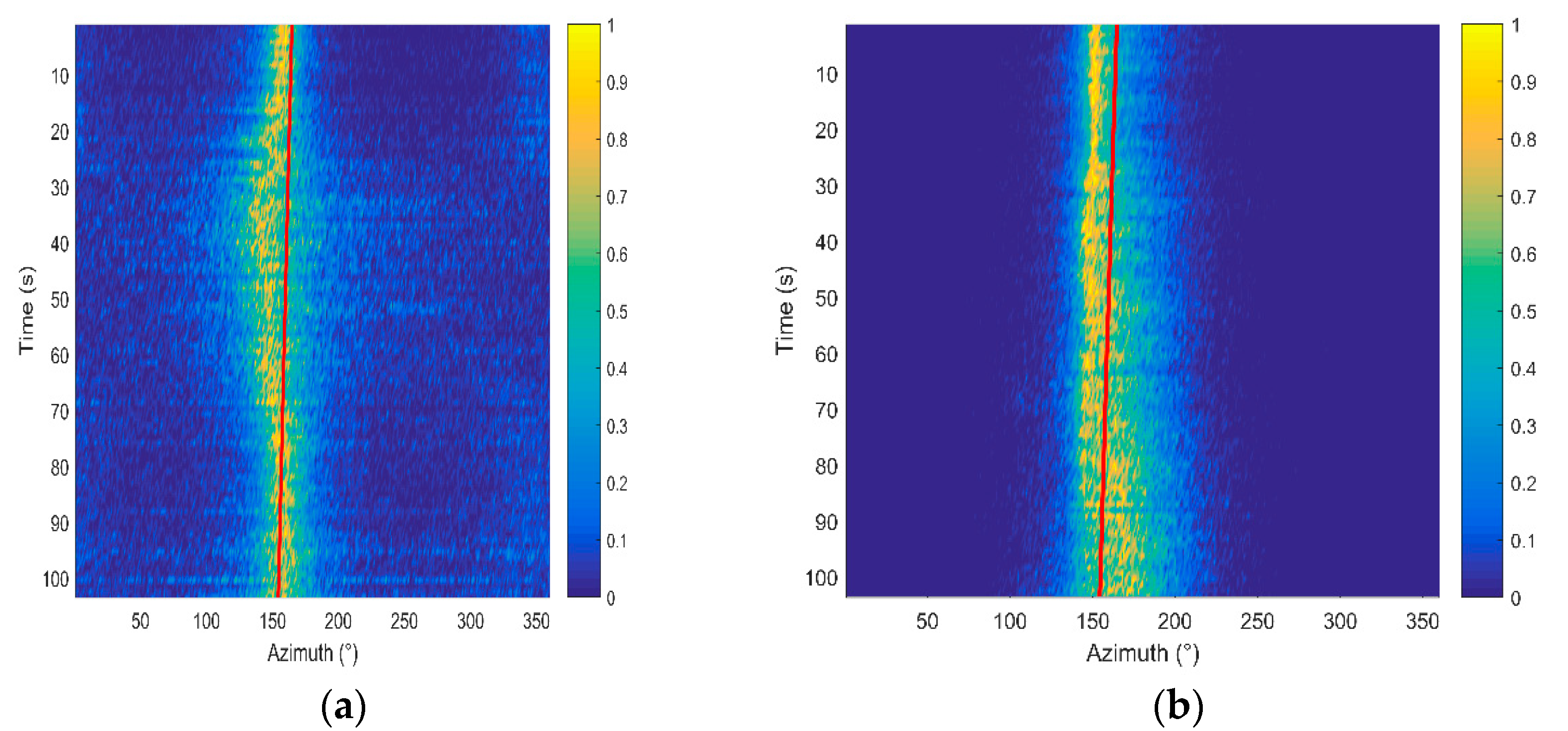
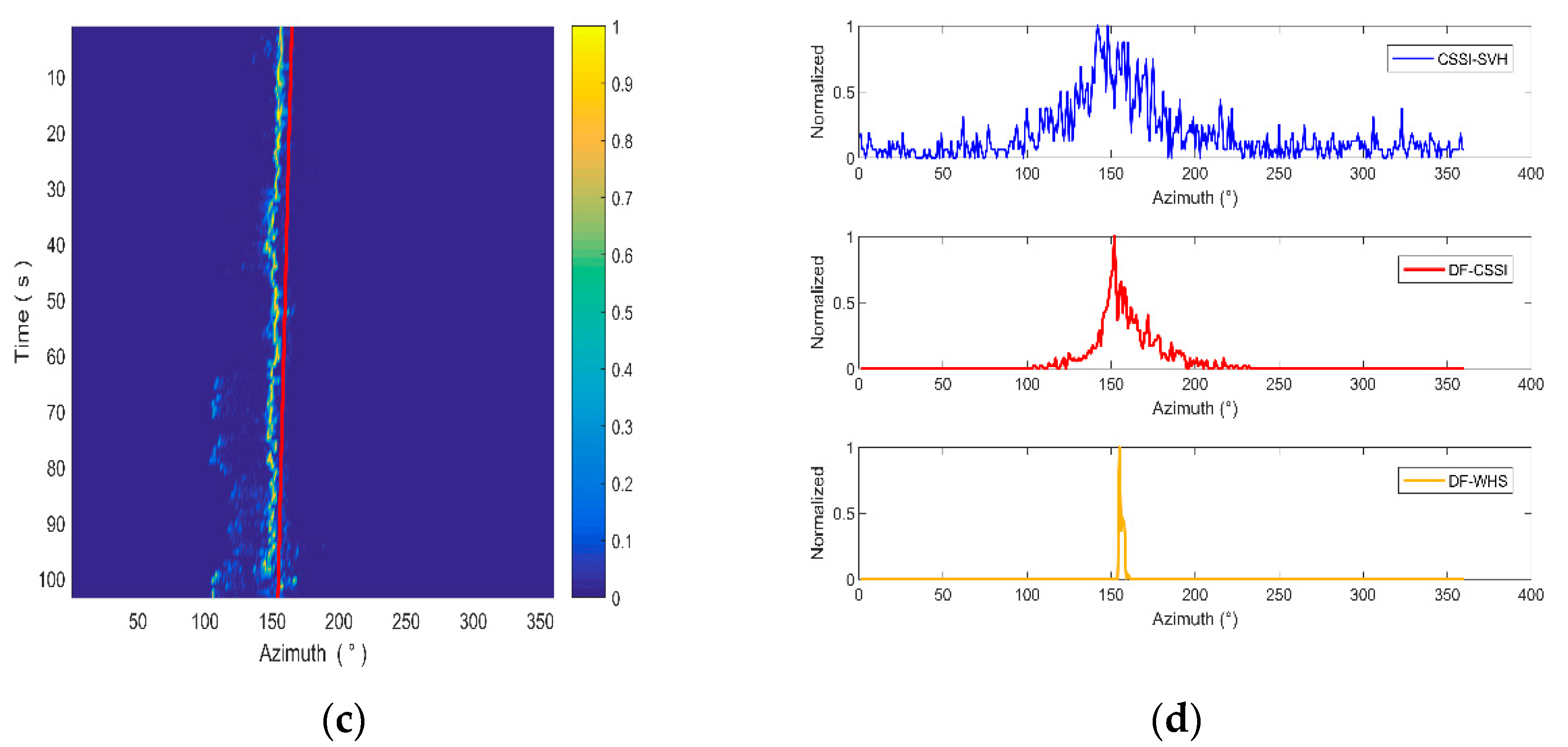
4.2. Processing Frequency Band of 200–900 Hz
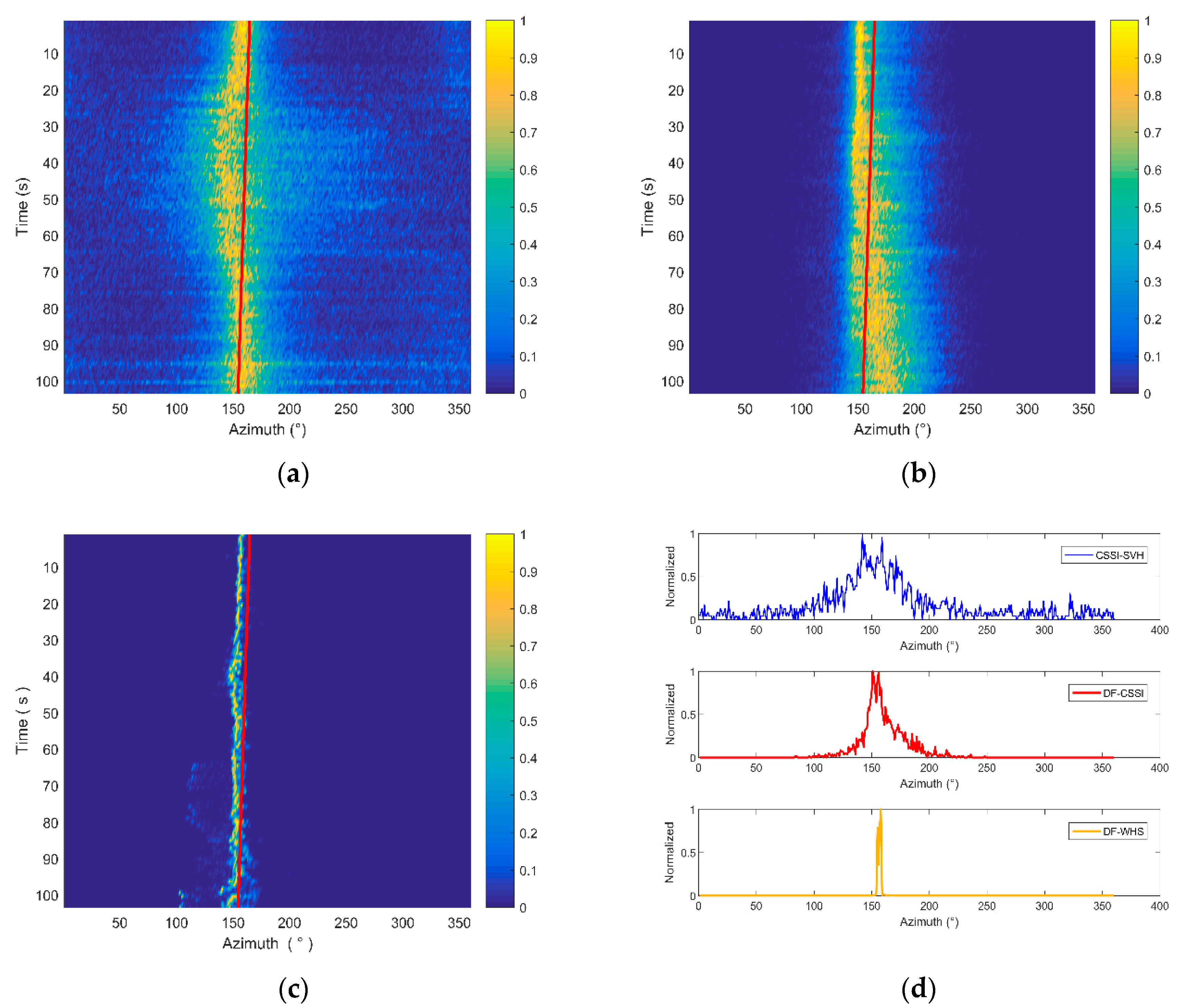
4.3. Processing Frequency Band of 100–1500 Hz
- 1.
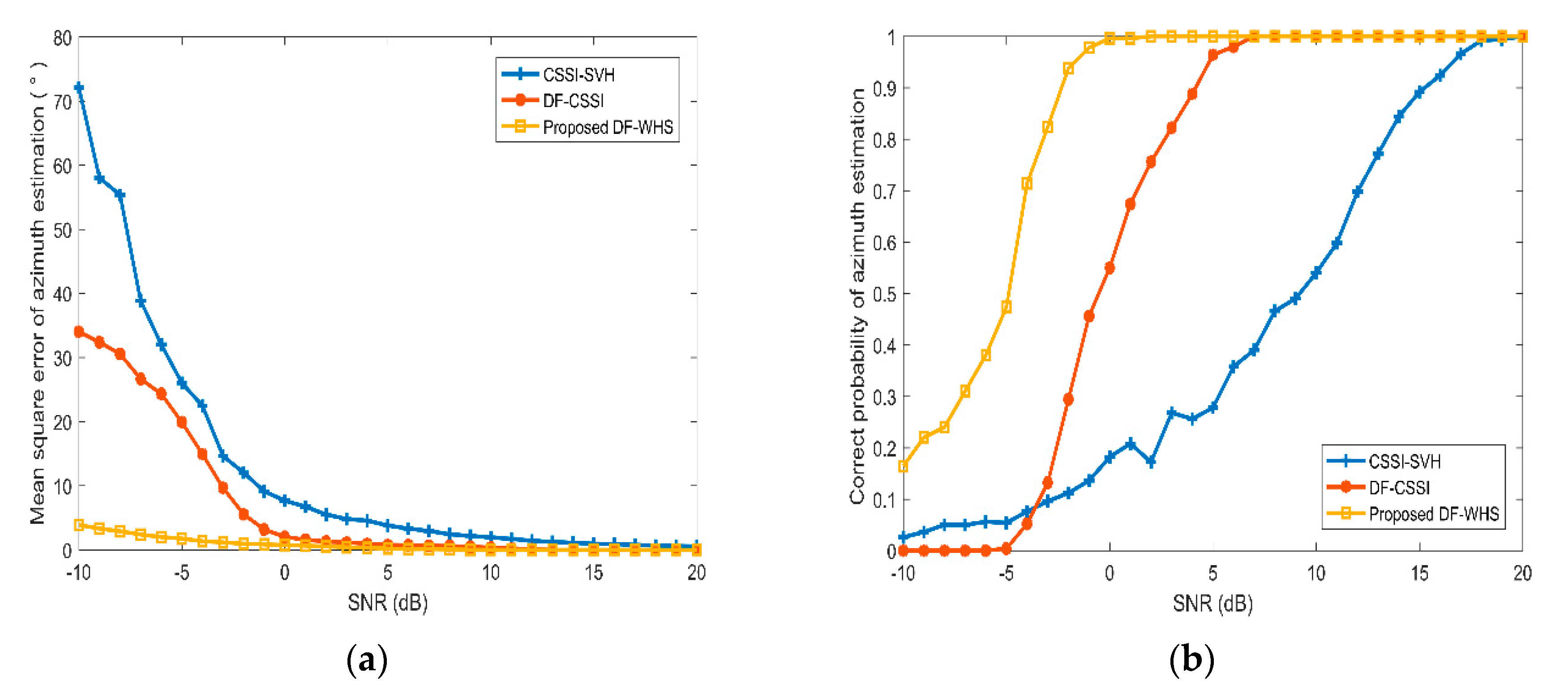
- The SNR of the signal received cannot be too low, and most hydrophone elements of the array need to have a good orientation result.The music high-resolution algorithm is greatly affected by SNR. As shown in Figure 8b, when the SNR is less than –4 dB, the correct probability for the DF-WHS method is less than 0.7. Especially when the SNR is –10 dB, the correct probability is as low as 0.16 (the yellow line), because in the case of a low SNR of each sub-band, the orientation performances of all elements are poor. The fusion result of the DF-WHS method is also very poor. Therefore, this method depends on the element orientation result, and most hydrophone elements of the array need to have a good orientation result.
- 2.
- This method is more suitable for a moving target with a low azimuth change rate.We applied the approach of segmentation in this paper, and the time length of each segment was set to be 1s. If the azimuth of the moving target changes quickly, the estimated azimuth within 1 s is much closer to the intermediate value of the azimuth change range, and the correct probability will decrease accordingly. Therefore, the moving speed of the target is suggested to be low enough, or the target is far from the vertical array. According to the proposed algorithm, we aspire for the azimuth change rate of the target to be less than 1°.
- 3.
- The target and array should avoid being located in the shadow zone.In the shadow zone, the sound field is mainly dominated by bottom-reflected rays rather than direct rays. The arrival angle does not truly reflect the target azimuth angle. Thus, the orientation performance may be inaccurate.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gordienko, V.A.; II’ichev, V.I.; Zakharov, L.N. Vector-Phase Methods in Acoustics; National Defense Industry Press: Beijing, China, 2014. [Google Scholar]
- Nehorai, A.; Paldi, E. Acoustic vector-sensor array processing. IEEE Trans. Signal Process. 1994, 42, 2481–2491. [Google Scholar] [CrossRef]
- Nehorai, A.; Paldi, E. Vector-sensor array processing for electromagnetic source localization. IEEE Trans. Signal Process. 1994, 42, 376–398. [Google Scholar] [CrossRef]
- Felisberto, P.; Santos, P.; Jesus, S.M. Tracking source azimuth using a single vector sensor. In Proceedings of the 2010 Fourth International Conference on Sensor Technologies and Applications, Venice, Italy, 18–25 July 2010; pp. 416–421. [Google Scholar]
- Hawkes, M.; Nehorai, A. Acoustic vector-sensor beamforming and Capon direction estimation. IEEE Trans. Signal Process. 1998, 46, 2291–2304. [Google Scholar] [CrossRef]
- Lai, H.; Bell, K.; Cox, H. DOA estimation using vector sensor arrays. In Proceedings of the 2008 42nd Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 26–29 October 2008; pp. 293–297. [Google Scholar]
- Wong, K.T.; Zoltowski, M. Root-MUSIC-based azimuth-elevation angle-of-arrival estimation with uniformly spaced but arbitrarily oriented velocity hydrophones. IEEE Trans. Signal Process. 1999, 47, 3250–3260. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M. Self-initiating MUSIC-based direction finding in underwater acoustic particle velocity-field beamspace. IEEE J. Ocean. Eng. 2000, 25, 262–273. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M. Uni-vector-sensor ESPRIT for multisource azimuth, elevation, and polarization estimation. IEEE Trans. Antennas Propag. 1997, 45, 1467–1474. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M. Extended-aperture underwater acoustic multisource azimuth/elevation direction-finding using uniformly but sparsely spaced vector hydrophones. IEEE J. Ocean. Eng. 1997, 22, 659–672. [Google Scholar] [CrossRef]
- Wong, K.T. Blind beamforming/geolocation for wideband-FFHs with unknown hop-sequences. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 65–76. [Google Scholar] [CrossRef]
- Ao, Y.; Xu, K.; Wan, J.; Chen, Y. A modified uni-vector-hydrophone ESPRIT algorithm for multisource joint DOA-frequency estimation. In Proceedings of the 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 13–16 December 2017; pp. 1381–1385. [Google Scholar]
- Sun, F.; Gao, B.; Chen, L.; Lan, P. A Low-Complexity ESPRIT-Based DOA Estimation Method for Co-Prime Linear Arrays. Sensors 2016, 16, 1367. [Google Scholar] [CrossRef]
- Zhang, D.; Zhang, Y.; Zheng, G.; Feng, C.; Tang, J. ESPRIT-Like Two-Dimensional DOA Estimation for Monostatic MIMO Radar with Electromagnetic Vector Received Sensors under the Condition of Gain and Phase Uncertainties and Mutual Coupling. Sensors 2017, 17, 2457. [Google Scholar] [CrossRef]
- Cao, M.-Y.; Mao, X.; Long, X.; Huang, L. Tensor Approach to DOA Estimation of Coherent Signals with Electromagnetic Vector-Sensor Array. Sensors 2018, 18, 4320. [Google Scholar] [CrossRef]
- Li, J.; Li, Z.; Zhang, X. Partial Angular Sparse Representation Based DOA Estimation Using Sparse Separate Nested Acoustic Vector Sensor Array. Sensors 2018, 18, 4465. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Kong, Y.; He, X.; Zhang, M.; Tan, X. An Improved Squirrel Search Algorithm for Maximum Likelihood DOA Estimation and Application for MEMS Vector Hydrophone Array. IEEE Access 2019, 7, 118343–118358. [Google Scholar] [CrossRef]
- Najeem, S.; Kiran, K.; Malarkodi, A.; Latha, G. Open lake experiment for direction of arrival estimation using acoustic vector sensor array. Appl. Acoust. 2017, 119, 94–100. [Google Scholar] [CrossRef]
- Sun, G.Q.; Li, Q.H.; Zhang, B. Acoustic vector sensor signal processing. Chin. J. Acoust. 2006, 1, 1–15. [Google Scholar]
- Cray, B.A.; Nuttall, A.H. Directivity factors for linear arrays of velocity sensors. J. Acoust. Soc. Am. 2001, 110, 324–331. [Google Scholar] [CrossRef]
- Hall, D.L. Mathematical Techniques in Multisensor Data Fusion; Artech House: Boston, MA, USA, 1992. [Google Scholar]
- Klein, L.A. Sensor and Data Fusion Concepts and Applications; Society of Photo-Optical Instrumentation Engineers (SPIE) Press: Bellingham, WA, USA, 1999. [Google Scholar]
- Hall, D.; Llinas, J. An introduction to multisensor data fusion. Proc. IEEE 1997, 85, 6–23. [Google Scholar] [CrossRef]
- Majumder, S.; Scheding, S.J.; Durrant-Whyte, H.F. Multisensor data fusion for underwater navigation. Robot. Auton. Syst. 2001, 35, 97–108. [Google Scholar] [CrossRef]
- Zhang, Y.Y.; Du, L.B.; Sun, J.C.; Zhang, Y.; Hou, G.L. Simulation of Bearing Fusion Algorithm for Vector Hydrophone. J. Data Acq. Process. 2010, 3, 107–111. [Google Scholar]
- Li, X.; Ma, X. Underwater data fusion of multiple arrays in a mono-platform for low SNR. In Proceedings of the 2017 IEEE International Conference on Signal Processing, Xiamen, China, 22–25 October 2017; pp. 1–4. [Google Scholar]
- Dos Santos, M.M.; De Giacomo, G.G.; Drews, P.L.J.; Botelho, S.S.C. Underwater Sonar and Aerial Images Data Fusion for Robot Localization. In Proceedings of the 2019 19th International Conference on Advanced Robotics (ICAR), Belo Horizonte, Brazil, 2–6 December 2019; pp. 578–583. [Google Scholar]
- Tollefsen, D.; Dosso, S.E. Matched-field source localization with multiple small-aperture arrays. J. Acoust. Soc. Am. 2015, 138, 1754. [Google Scholar] [CrossRef]
- Tollefsen, D.; Dosso, S.E. Source Localization with Multiple Hydrophone Arrays via Matched-Field Processing. IEEE J. Ocean. Eng. 2016, 42, 654–662. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, J.F.; Luo, H.; Meng, Z. Analysis of the natural frequency and phase sensitivity of an optical fiber accelerometer coated with a rigid package. Opt. Eng. 2013, 52, 126104. [Google Scholar] [CrossRef]
- Wang, J.F.; Luo, H.; Meng, Z.; Hu, Y.M. Experimental research of an all-polarization-maintaining optical fiber vector hydrophone. J. Light. Technol. 2011, 30, 1178–1184. [Google Scholar] [CrossRef]
- Stutzman, W.L.; Thiele, G.A. Antenna Theory and Design, 3rd ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2012; p. 46. [Google Scholar]
- Sun, G.Q.; Yang, D.S.; Zhang, L.Y.; Shi, S.G. Maximum likelihood ratio detection and maximum likelihood DOA estimation based on the vector hydrophone. Acta Acust. 2003, 1, 66–72. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Name | Estimated MSE When SNR = −10 dB | Minimum SNR Required When the Correct Probability Reaches 1 |
|---|---|---|
| CSSI-SVH | 72.1° | 20 dB |
| DF-CSSI | 34.0° | 7 dB |
| DF-WHS | 3.9° | 0 dB |
| Algorithm Name | Beam Width |
|---|---|
| CSSI-SVH | 35° |
| DF-CSSI | 25° |
| DF-WHS | 4° |
| Algorithm Name | Beam Width |
|---|---|
| CSSI-SVH | 40° |
| DF-CSSI | 35° |
| DF-WHS | 6° |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, Y.; Meng, Z.; Chen, Y.; Zhang, Y.; Wang, M.; Zhou, X. A Data Fusion Orientation Algorithm Based on the Weighted Histogram Statistics for Vector Hydrophone Vertical Array. Sensors 2020, 20, 5619. https://doi.org/10.3390/s20195619
Liang Y, Meng Z, Chen Y, Zhang Y, Wang M, Zhou X. A Data Fusion Orientation Algorithm Based on the Weighted Histogram Statistics for Vector Hydrophone Vertical Array. Sensors. 2020; 20(19):5619. https://doi.org/10.3390/s20195619
Chicago/Turabian StyleLiang, Yan, Zhou Meng, Yu Chen, Yichi Zhang, Mingyang Wang, and Xin Zhou. 2020. "A Data Fusion Orientation Algorithm Based on the Weighted Histogram Statistics for Vector Hydrophone Vertical Array" Sensors 20, no. 19: 5619. https://doi.org/10.3390/s20195619
APA StyleLiang, Y., Meng, Z., Chen, Y., Zhang, Y., Wang, M., & Zhou, X. (2020). A Data Fusion Orientation Algorithm Based on the Weighted Histogram Statistics for Vector Hydrophone Vertical Array. Sensors, 20(19), 5619. https://doi.org/10.3390/s20195619