Considerations for Determining the Coefficient of Inertia Masses for a Tracked Vehicle


 and
and
Abstract
1. Introduction
2. Background
3. Theoretical Considerations Regarding Mass Moment of Inertia Coefficient δ
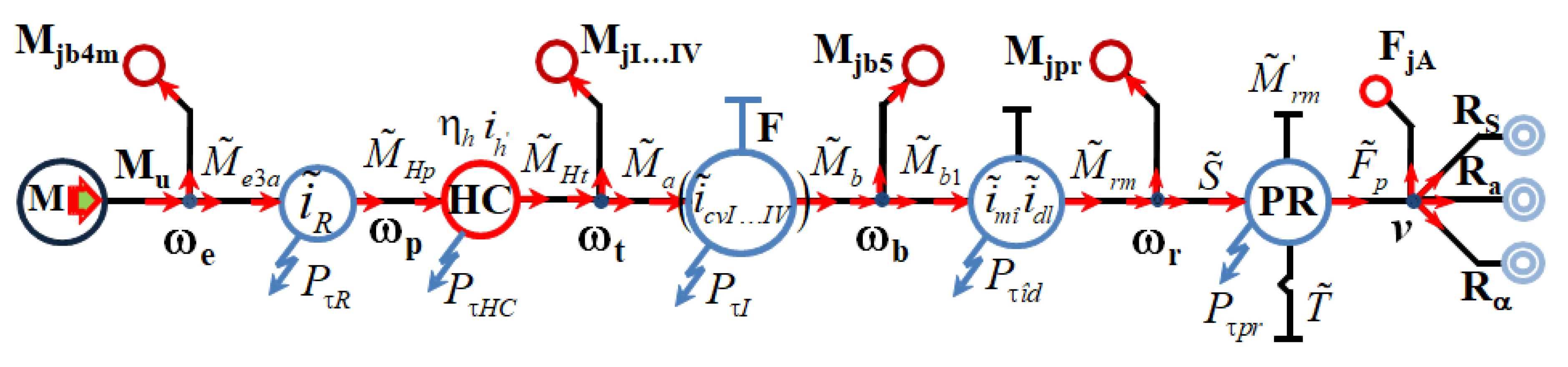
- hydromechanical operation:
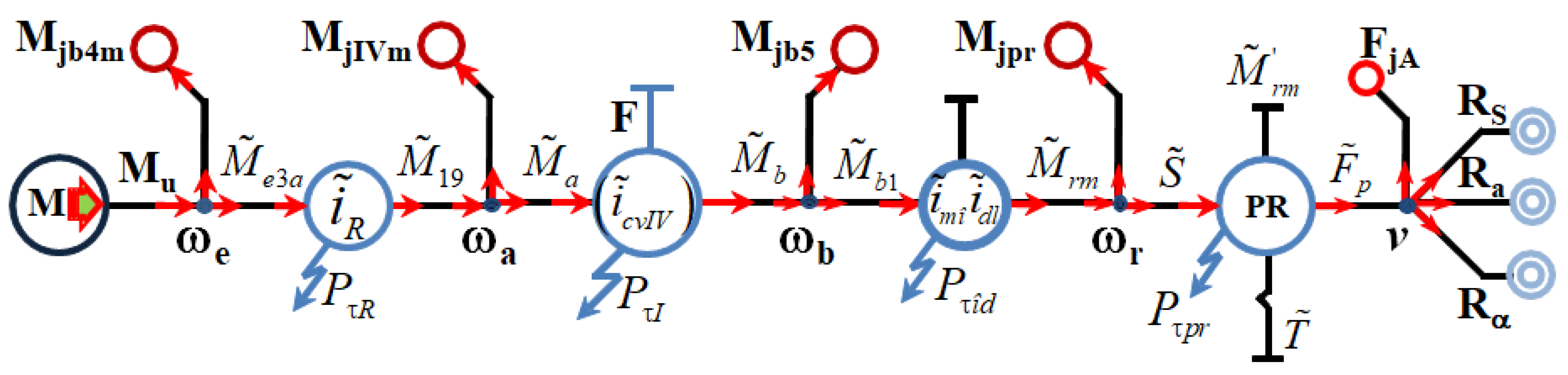
- mechanical operation—HC blocked:
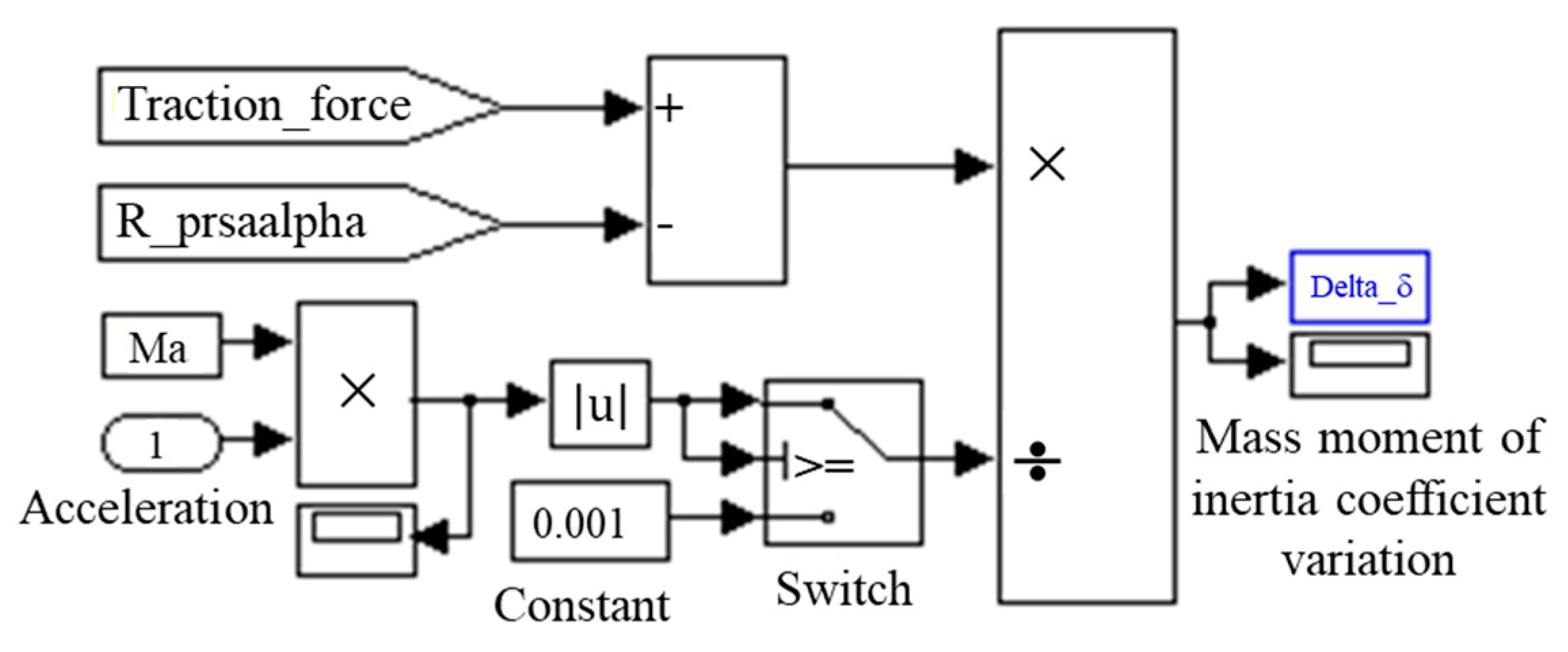
4. Concepts for Simulating the Variation of the Mass Moment of Inertia Coefficient δ
5. Experimental Methods Used to Determine the Mass Moment of Inertia Coefficient δ
5.1. The Gravitational Method
5.1.1. The Classical Gravitational Method
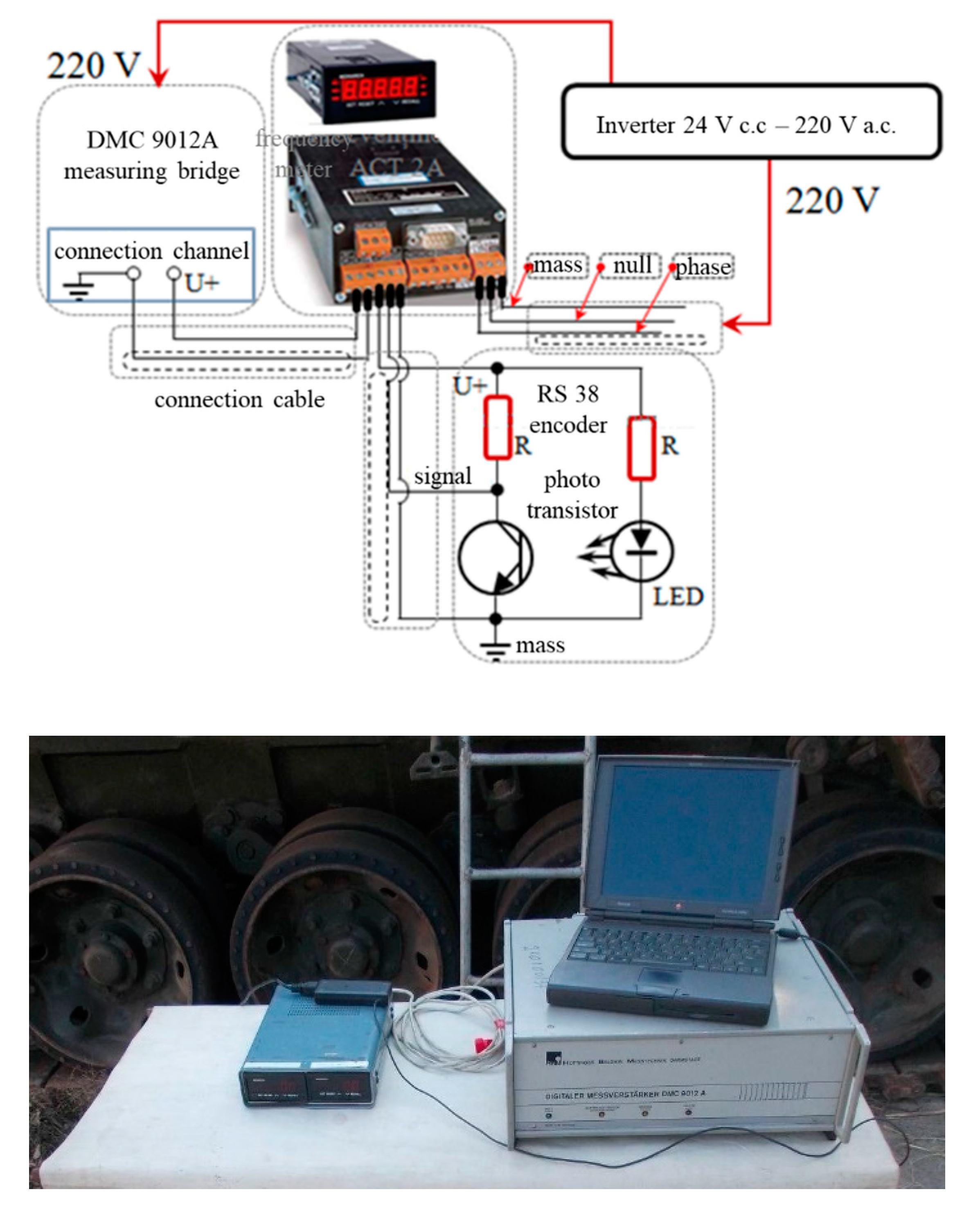
5.1.2. Computer-Assisted Gravitational Method
- acceleration phase—95.72% in I gear, 96.76% in II gear, 97.41% in III gear, 96.73% in IV gear and 98.02% in neutral;
- deceleration phase—93.99% in I gear, 97.95% in II gear, 98.36% in III gear, 98.50% in IV gear and 98.26% in neutral.
- I gear—2.96% acceleration phase and 3.65% deceleration phase;
- II gear—2.71% acceleration phase and 3.55% deceleration phase;
- III gear—2.49% acceleration phase and 3.17% deceleration phase;
- IV gear—5.47% acceleration phase and 4.51% deceleration phase;
- neutral—4.72% acceleration phase and 4.86% deceleration phase.
5.2. Three-Wire Suspension Method
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| longitudinal acceleration of the vehicle | |
| linear correlation coefficient | |
| covariance coefficient | |
| kinetic energy | |
| potential energy | |
| the coefficient of the total advance resistance force | |
| the inertial flow load factor of the vehicle | |
| the inertial forces of the propulsion system | |
| the force of inertia of the track | |
| stationary propulsion force | |
| dynamic propulsion force | |
| stationary traction force | |
| dynamic traction force | |
| gravitational acceleration | |
| vehicle’s weight | |
| HC | torque convertor |
| the total kinematic transmission ratio in the gear (i = I … IV) of the planetary gearbox | |
| the absolute transmission ratio of the mechanical transmission | |
| the kinematic transmission ratio of the final drive | |
| the kinematic transmission ratio of the distribution mechanism | |
| torque convertor kinematic transmission ratio | |
| the inverse of the kinematic transmission ratio of the torque convertor | |
| the kinematic transmission ratio of the planetary summation mechanism | |
| the absolute transmission ratio for the operation of the transmission with the torque convertor blocked | |
| the sum of the moments of inertia of the rotating elements with angular velocity | |
| the sum of the moments of inertia of the rotating elements with angular velocity | |
| the sum of the moments of inertia of the rotating elements with angular velocity | |
| the sum of the moments of inertia of the rotating elements with angular velocity | |
| the sum of the moments of inertia of the rotating elements with angular velocity | |
| the moment of inertia of the satellite plateaus of the planetary summation mechanisms | |
| the moment of inertia of the satellite plateaus of the final drive | |
| equivalent moment of inertia reduced at the crankshaft | |
| equivalent moment of inertia reduced at the output shaft of the planetary gearbox | |
| equivalent moment of inertia reduced at the inlet shaft of the torque convertor pump | |
| moments of inertia of the road wheel | |
| the moments of inertia of the wheels contained in the tracked propulsion system | |
| equivalent reduced moments of inertia at the entry shaft of the planetary gearbox | |
| equivalent reduced moments of inertia at the output shaft of the reversing mechanism | |
| moment of inertia of the propulsion system wheels reduced to the drive sprocket | |
| moments of inertia of the tensioning wheel | |
| moments of inertia of the support roller | |
| equivalent moment of inertia reduced to the drive sprocket axle | |
| equivalent moment of inertia reduced to the axle of the drive sprockets in mechanical mode | |
| torque convertor capacity factor | |
| constant of the planetary mechanism of the final drive | |
| torque convertor transformation ratio | |
| the constant of the planetary summation mechanism | |
| Ma | tank mass |
| armored hull mass | |
| shear moment | |
| the torque that loads the torque convertor pump shaft | |
| the torque that loads the torque convertor turbine shaft | |
| the torque reduced to the drive sprocket of the moments of inertial forces of the propulsion system wheels | |
| propulsion system mass | |
| track mass | |
| torque absorbed by torque convertor pump | |
| stationary drive sprocket torque | |
| dynamic drive sprocket torque | |
| number of oscillations | |
| number of experimental values | |
| the torque convertor pump | |
| angular speed of torque convertor turbine | |
| the radius of the drum on which the metal cable was wound | |
| amplitude of oscillating motion | |
| air resistance force | |
| road wheel radius | |
| propulsion system resistance force | |
| total advance resistance force | |
| drive sprocket radius | |
| tensioning wheel radius | |
| support roller radius | |
| runway resistance force | |
| uphill resistance force | |
| acceleration resistance force | |
| starting distance | |
| standard deviations for the vector time | |
| standard deviations for the angular velocity | |
| times of lowering of mass weights from height | |
| times of lowering of mass weights from height | |
| starting time | |
| the times elapsed during the n oscillations of the circular platform and the platform element i assembly | |
| the period of oscillation of the platform of the experimental device | |
| gear changing time | |
| arithmetic means of experimental values - vectors | |
| vehicle speed | |
| coefficient of inertia masses | |
| the coefficient of the inertial masses of rotation arranged upstream of the torque convertor | |
| the coefficient of inertial masses of rotation of the tracked propulsion system | |
| the coefficient of inertial masses in rotational motion | |
| the coefficient of inertial masses in translational motion | |
| the coefficient of the inertial masses of rotation arranged downstream of the torque convertor. | |
| angular acceleration of torque convertor pump | |
| angular acceleration of drive sprocket | |
| angular acceleration of torque convertor turbine | |
| mechanical transmission efficiency | |
| the efficiency corresponding to the gear (i) of the planetary gearbox | |
| the efficiency of the planetary mechanism of the final drive | |
| efficiency of outer cylindrical | |
| torque convertor efficiency | |
| efficiency of inner cylindrical | |
| efficiency of bevel gears | |
| the efficiency of the planetary summation mechanism and the lateral demultiplexer | |
| efficiency of summation mechanisms and final transmissions | |
| distribution mechanisms efficiency | |
| transmission efficiency with the torque convertor blocked | |
| elongation of the oscillating motion | |
| the angular velocity | |
| the angular velocity of the input shafts of the gearbox | |
| the angular velocity of the output shafts of the gearbox | |
| angular speed at the crankshaft | |
| the value estimated by the approximation model | |
| the torque convertor pump | |
| angular speed of the drive sprocket | |
| angular speed of torque convertor turbine | |
| arithmetic means of experimental values - vectors |
References
- Alexa, O.; Truță, M.; Marinescu, M.; Vilău, R.; Vînturiș, V. Simulating the longitudinal dynamics of a tracked vehicle. Adv. Mater. Res. 2014, 1036, 499–504. [Google Scholar] [CrossRef]
- Ubysz, A. Problems of rotational mass in passenger vehicles. Proc. Probl. Transp. Probl. Int. Sci. J. 2010, 5, 33–40. [Google Scholar]
- Grigore, L.Ș.; Priescu, I.; Grecu, D.L. Cap. 4 Terrestrial Mobile Robots, Applied Artificial Intelligence in Fixed and Mobile Robotic Systems; AGIR: Bucharest, Romania, 2020; p. 703. [Google Scholar]
- Ciobotaru, T.; Alexa, O. Ingineria Autovehiculelor Militare cu Șenile. Vol. III: Transmisia. Frânele. Agregatul Energetic; Publishing House of the Military Technical Academy “Ferdinand I”: Bucharest, Romania, 2019; p. 356. [Google Scholar]
- Abbassi, Y.; Ait-Amirat, Y.; Outbib, R. Global modeling and simulation of vehicle to analyze the inertial parameters effects. Int. J. Model. Simul. Sci. Comput. 2016, 7, 1650032. [Google Scholar] [CrossRef]
- U.S. Army Test and Evaluation Command Test Operations Procedure. Test Operations Procedure (TOP) 01-2-520 Moments of Inertia; Policy and Standardization Division (CSTE-TM); U.S. Army Test and Evaluation Command: Aberdeen Proving Ground, MD, USA, 2017; p. 41. [Google Scholar]
- Zhu, T.; Zhang, F.; Li, J.; Li, F.; Zong, Z. Development Identification Method of Inertia Properties for Heavy Truck Engine Based on MIMS Test Rig. In Proceedings of the 4th International Conference on Mechatronics and Mechanical Engineering (ICMME 2017), MATEC Web of Conference, Kuala-Lumpur, Malaysia, 28–30 November 2018; Volume 153, pp. 373–380. [Google Scholar]
- Dumberry, M.; Bloxham, J. Variations in the Earth’s gravity field caused by torsional oscillations in the core. Geophys. J. Int. 2004, 159, 417–434. [Google Scholar]
- Matsuo, K.; Otsubo, T. Temporal variations in the Earth’s gravity field from multiple SLR satellites: Toward the investigation of polar ice sheet mass balance. In Proceedings of the 18th International Workshop on Laser Ranging, Fujiyoshida, Japan, 11–15 November 2013. [Google Scholar]
- Koralewski, G. Modelling of the system driver—Automation—Autonomous vehicle—Road. Open Eng. 2020, 10, 175–182. [Google Scholar] [CrossRef]
- Truță, M.; Alexa (Fieraru), O.; Vilău, R.; Vînturiș, V.; Marinescu, M. Static and Dynamic Analysis of a Planetary Gearbox Working Process. Period. Eng. Adv. Mater. Res. 2013, 837, 489–494. [Google Scholar]
- Technical Presentation Data of the Tank TR 85 M1, C.N.; ROMARM Bucharest Mechanical Plant Branch S.A.: Bucharest, Romania, 2020.
- Technical Documentation of CHC 420CML Hydroconverter; Hidromecanica: Brasov, Romania, 2004.
- The Measurement Sheets for the Approval of the Manufacturing Process of the 8VSA2T2M Engine Assembly by C.N.; ROMARM S.A.—Bucharest Mechanical Plant Branch: Bucharest, Romania, 2020.
- Goelles, T.; Schlager, B.; Muckenhuber, S. Fault Detection, Isolation, Identification and Recovery (FDIIR) Methods for Automotive Perception Sensors Including a Detailed Literature Survey for Lidar. Sensors 2020, 20, 3662. [Google Scholar] [CrossRef]
- Messina, M.; Njuguna, J.; Palas, C. Mechanical Structural Design of a MEMS-Based Piezoresistive Accelerometer for Head Injuries Monitoring: A Computational Analysis by Increments of the Sensor Mass Moment of Inertia. Sensors 2018, 18, 289. [Google Scholar] [CrossRef]
- Ciobotaru, T.; Frunzeti, D.; Rus, I.; Jäntschi, L. The working regime analysis of a track-type tractor. Int. J. Heavy Veh. Syst. 2012, 19, 172–187. [Google Scholar]
- Korlath, G. Mobility analysis of off-road vehicles: Benefits for development, procurement and operation. J. Terramech. 2007, 44, 383–393. [Google Scholar] [CrossRef]
- Sandu, C.; Freeman, J.S. Military tracked vehicle model. Part II: Case study. Int. J. Veh. Syst. Model. Test. 2005, 1, 216–231. [Google Scholar] [CrossRef]
- Galati, R.; Reina, G. Terrain Awareness Using a Tracked Skid-Steering Vehicle with Passive Independent Suspensions. Robot. AI Robot. Control Syst. 2019, 6, 1–11. [Google Scholar] [CrossRef]
- Özdemir, M.N.; Kiliç, V.; Ünlüsoy, Y.S. A new contact & slip model for tracked vehicle transient dynamics on hard ground. J. Terramech. 2017, 73, 3–23. [Google Scholar]
- Wong, J.Y.; Wei, H. Evaluation of the effects of design features on tracked vehicle mobility using an advanced computer simulation model. Int. J. Heavy Veh. Syst. 2005, 12, 344–365. [Google Scholar] [CrossRef]
- Rubinstein, D.; Hitron, R. A detailed multi-body model for dynamic simulation of off-road tracked vehicles, 14th International Conference of the ISTVS. J. Terramech. 2004, 41, 163–173. [Google Scholar] [CrossRef]
- Kang, O.; Park, Y.; Park, Y. Look-ahead preview control application to the high-mobility tracked vehicle model with trailing arms. J. Mech. Sci. Technol. 2009, 23, 914–917. [Google Scholar] [CrossRef]
- Ordaz, P.; Rodríguez-Guerrero, L.; Santos, O.; Cuvas, C.; Romero, H.; Ordaz-Oliver, M.; López-Pérez, P. Parameter estimation of a second order system via non linear identification algorithm. IOP Publ. Conf. Ser. Mater. Sci. Eng. 2020, 844, 012038. [Google Scholar] [CrossRef]
- Vilău, R.; Marinescu, M.; Alexa, O.; Oloeriu, F.; Truţă, M. Advantages of spectrally analyzed data. Stochastic models for automotive measured parameters. Adv. Mater. Res. 2014, 1036, 493–498. [Google Scholar] [CrossRef]
- Vilău, R.; Marinescu, M.; Alexa, O.; Truţă, M.; Vînturiş, V. Diagnose method based on spectral analysis of measured parameters. Adv. Mater. Res. 2014, 1036, 535–540. [Google Scholar] [CrossRef]
- Grewal, M.S.; Andrews, A.P. Kalman Filtering: Theory and Practice Using Matlab, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015; p. 640. [Google Scholar]
- Grigore, L.Ș.; Popa, D.; Ciobotaru, T.; Vînturiș, V.; Popoviciu, B. Considerations regarding the measuring the performance of a vehicle during braking on a slope extended. Adv. Mater. Res. 2013, 718–720, 490–495. [Google Scholar] [CrossRef]
- Xu, X.; Dong, P.; Liu, Y.; Zhang, H. Progress in Automotive Transmission Technology. Automot. Innov. 2018, 1, 187–210. [Google Scholar] [CrossRef]
- Huang, W.; Wong, J.Y.; Preston-Thomas, J.; Jayakumar, P. Predicting terrain parameters for physics-based vehicle mobility models from cone index data. J. Terramech. 2020, 88, 29–40. [Google Scholar] [CrossRef]
- Lee, S.H.; Lee, J.H.; Goo, S.H.; Cho, Y.C.; Cho, H.Y. An Evaluation of Relative Damage to the Powertrain System in Tracked Vehicles. Sensors 2009, 9, 1845–1859. [Google Scholar] [CrossRef]
- Ma, X.; Wong, P.K.; Zhao, J.; Xie, Z. Multi-Objective Sliding Mode Control on Vehicle Cornering Stability with Variable Gear Ratio Actuator-Based Active Front Steering Systems. Sensors 2017, 17, 49. [Google Scholar] [CrossRef]
- Wi, H.; Park, H.; Hong, D. Model Predictive Longitudinal Control for Heavy-Duty Vehicle Platoon Using Lead Vehicle Pedal Information. Int. J. Automot. Technol. 2020, 21, 563–569. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Execution Elements | |||||
|---|---|---|---|---|---|
| ASS | ASD | ARM | ARm | ||
| Progression | Rectilinear | ||||
| Turn right big radius | |||||
| Turn right small radius | |||||
| Turn left big radius | |||||
| Turn left small radius | |||||
| Reversing | Rectilinear | ||||
| Turn right big radius | |||||
| Turn right small radius | |||||
| Turn left big radius | |||||
| Turn left small radius | |||||
| CVP Gear | Sample Number | Mass (m1) (kg) | Mass (m2) (kg) | Time (t1) (s) | Time (t2) (s) |
|---|---|---|---|---|---|
| I gear | 1a_gr1 | 500 | --- | 160.0 | --- |
| 2a_gr1 | 500 | --- | 160.4 | --- | |
| 3a_gr1 | 500 | --- | 161.1 | --- | |
| 1b_gr1 | --- | 600 | --- | 34.90 | |
| 2b_gr1 | --- | 600 | --- | 34.90 | |
| 3b_gr1 | --- | 600 | --- | 34.65 | |
| II gear | 1a_gr2 | 500 | --- | 144.0 | --- |
| 2a_gr2 | 500 | --- | 143.6 | --- | |
| 3a_gr2 | 500 | --- | 146.2 | --- | |
| 1b_gr2 | --- | 600 | --- | 31.80 | |
| 2b_gr2 | --- | 600 | --- | 28.50 | |
| 3b_gr2 | --- | 600 | --- | 27.85 | |
| III gear | 1a_gr3 | 500 | --- | 124.0 | --- |
| 2a_gr3 | 500 | --- | 114.4 | --- | |
| 3a_gr3 | 500 | --- | 118.7 | --- | |
| 1b_gr3 | --- | 600 | --- | 24.05 | |
| 2b_gr3 | --- | 600 | --- | 24.35 | |
| 3b_gr3 | --- | 600 | --- | 22.15 | |
| IV gear | 1a_gr4 | 500 | --- | 7.460 | --- |
| 2a_gr4 | 500 | --- | 7.798 | --- | |
| 3a_gr4 | 500 | --- | 7.929 | --- | |
| 1b_gr4 | --- | 600 | --- | 4.1 | |
| 2b_gr4 | --- | 600 | --- | 3.6 | |
| 3b_gr4 | --- | 600 | --- | 3.9 | |
| Neutral | 1a_neu | 500 | --- | 6.12 | --- |
| 2a_neu | 500 | --- | 6.78 | --- | |
| 3a_neu | 500 | --- | 6.43 | --- | |
| 1b_neu | --- | 600 | --- | 3.12 | |
| 2b_neu | --- | 600 | --- | 3.00 | |
| 3b_neu | --- | 600 | --- | 3.20 |
| Value of the Equivalent Moment of Inertia Reduced at the Drive Wheel | |||||
|---|---|---|---|---|---|
| (kg·m2) | |||||
| Equivalent moment of inertia | I gear | II gear | III gear | IV gear | Neutral |
| Iechiv_rm_metoda_clasica | 8735 | 6508 | 4122 | 1046 | 678 |
| Gearbox CVP | Weight Testing | Testing | Angular Acceleration (ε1) | Angular Deceleration (ε2) |
|---|---|---|---|---|
| (kg) | (rad/s2) | (rad/s2) | ||
| First gear | m2–600 | Test 1a_et1 | 0.0100 | −0.2445 |
| m2–600 | Test 2a_et1 | 0.0163 | −0.1870 | |
| m2–600 | Test 3a_et1 | 0.0146 | −0.1858 | |
| m2–600 | Test 4a_et1 | 0.0140 | −0.1877 | |
| Second gear | m2–600 | Test 1a_et2 | 0.0190 | −0.2507 |
| m2–600 | Test 2a_et2 | 0.0240 | −0.2479 | |
| m2–600 | Test 3a_et2 | 0.0251 | −0.2475 | |
| Third gear | m2–600 | Test 1a_et3 | 0.0336 | −0.3997 |
| m2–600 | Test 2a_et3 | 0.0343 | −0.4026 | |
| m2–600 | Test 3a_et3 | 0.0395 | −0.3920 | |
| Fourth gear | m2–600 | Test 1a_et4 | 1.1604 | −0.6537 |
| m2–600 | Test 2a_et4 | 1.1614 | −0.6624 | |
| m2–600 | Test 3a_et4 | 1.2037 | −0.6402 | |
| Neutral position | m2–600 | Test 1a_etn | 2.0304 | −0.9135 |
| m2–600 | Test 2a_etn | 1.8918 | −1.1062 |
| Equivalent Reduced Moment of Inertia Value at the Drive Wheel (kg·m2) | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| First Gear | Second Gear | Third Gear | Fourth Gear | Neutral Position | |||||
| Testing | I_echiv | Testing | I_echiv | Testing | I_echiv | Testing | I_echiv | Testing | I_echiv |
| 1a | 7785.2 | 1a | 5866.3 | 1a | 3649.9 | 1a | 846.33 | 1a | 509.42 |
| 2a | 7894.1 | 2a | 5818.1 | 2a | 3620.2 | 2a | 841.77 | 2a | 503.34 |
| 3a | 7845.6 | 3a | 5803 | 3a | 3664.7 | 3a | 831.70 | 3a | ----- |
| Iechiv_as_calc_et1 | Iechiv_as_calc_et2 | Iechiv_as_calc_et3 | Iechiv_as_calc_et4 | Iechiv_as_calc_neutru | |||||
| 7841 | 5829 | 3645 | 840 | 506 | |||||
| Tested Element | Sample Number | Period | Moment of Inertia Ip | |
|---|---|---|---|---|
| Period | Period | or Ip-i (kg·m2) | ||
| Tpj or Tp-ij (s) | Tp or Tp-i (s) | |||
| Three-wire pendulum platform | 1 | 3.2530 | 3.2558 | 0.6959 |
| 2 | 3.2420 | |||
| 3 | 3.2395 | |||
| 4 | 3.2630 | |||
| 5 | 3.2410 | |||
| 6 | 3.2752 | |||
| 7 | 3.2635 | |||
| 8 | 3.2575 | |||
| 9 | 3.2690 | |||
| 10 | 3.2540 | |||
| Platform—tensioning wheel assembly | 1 | 3.0520 | 3.0532 | 5.9727 |
| 2 | 3.0465 | |||
| 3 | 3.0560 | |||
| 4 | 3.0480 | |||
| 5 | 3.0490 | |||
| 6 | 3.0475 | |||
| 7 | 3.0605 | |||
| 8 | 3.0635 | 3.0532 | 5.9727 | |
| 9 | 3.0565 | |||
| 10 | 3.0520 | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alexa, O.; Coropețchi, I.; Vasile, A.; Oncioiu, I.; Grigore, L.Ș. Considerations for Determining the Coefficient of Inertia Masses for a Tracked Vehicle. Sensors 2020, 20, 5587. https://doi.org/10.3390/s20195587
Alexa O, Coropețchi I, Vasile A, Oncioiu I, Grigore LȘ. Considerations for Determining the Coefficient of Inertia Masses for a Tracked Vehicle. Sensors. 2020; 20(19):5587. https://doi.org/10.3390/s20195587
Chicago/Turabian StyleAlexa, Octavian, Iulian Coropețchi, Alexandru Vasile, Ionica Oncioiu, and Lucian Ștefăniță Grigore. 2020. "Considerations for Determining the Coefficient of Inertia Masses for a Tracked Vehicle" Sensors 20, no. 19: 5587. https://doi.org/10.3390/s20195587
APA StyleAlexa, O., Coropețchi, I., Vasile, A., Oncioiu, I., & Grigore, L. Ș. (2020). Considerations for Determining the Coefficient of Inertia Masses for a Tracked Vehicle. Sensors, 20(19), 5587. https://doi.org/10.3390/s20195587