Fatigue Monitoring in Running Using Flexible Textile Wearable Sensors

 , and
, and 
Abstract
1. Introduction
2. Materials and Methods
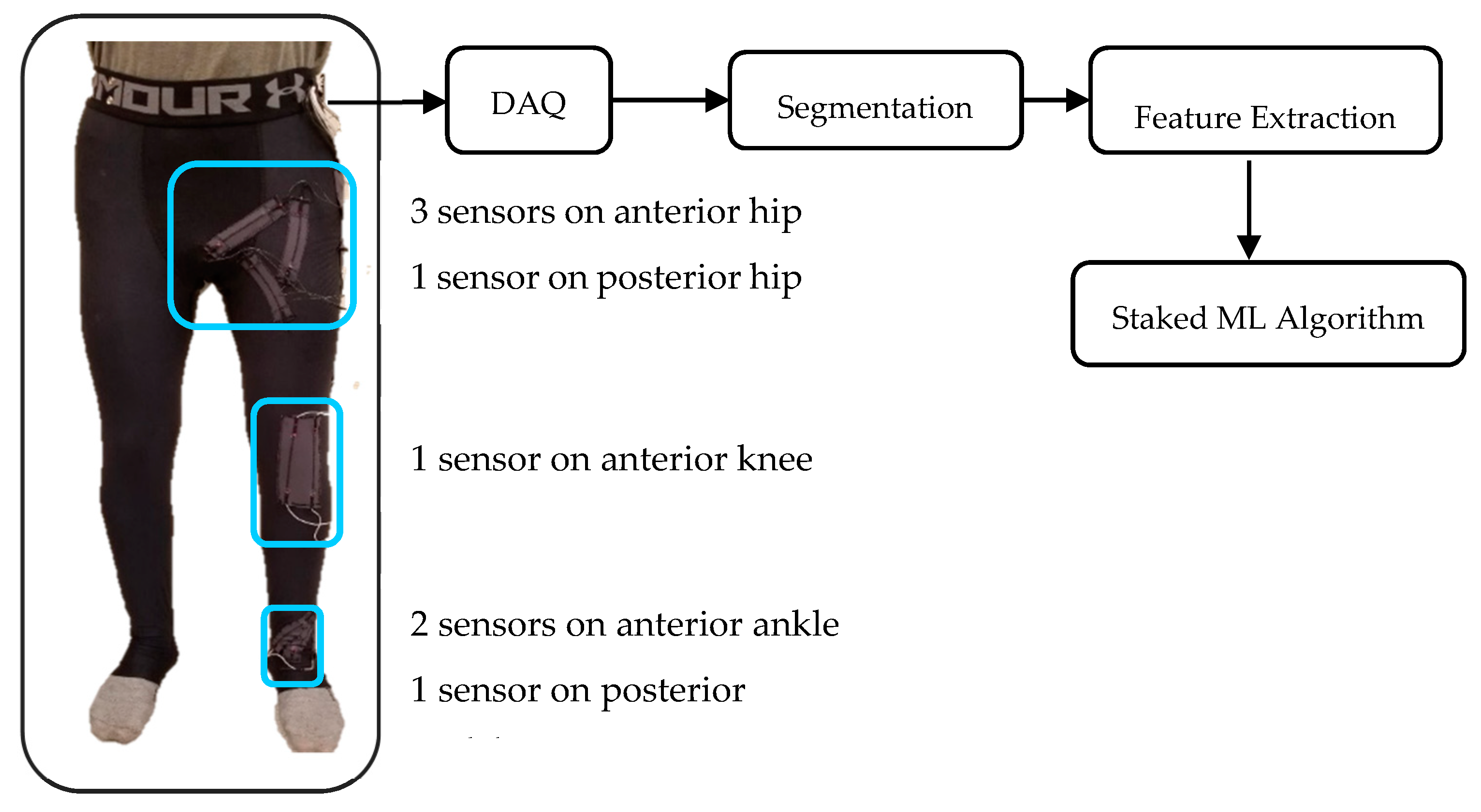
2.1. Experiment Setup
2.2. Data Collection
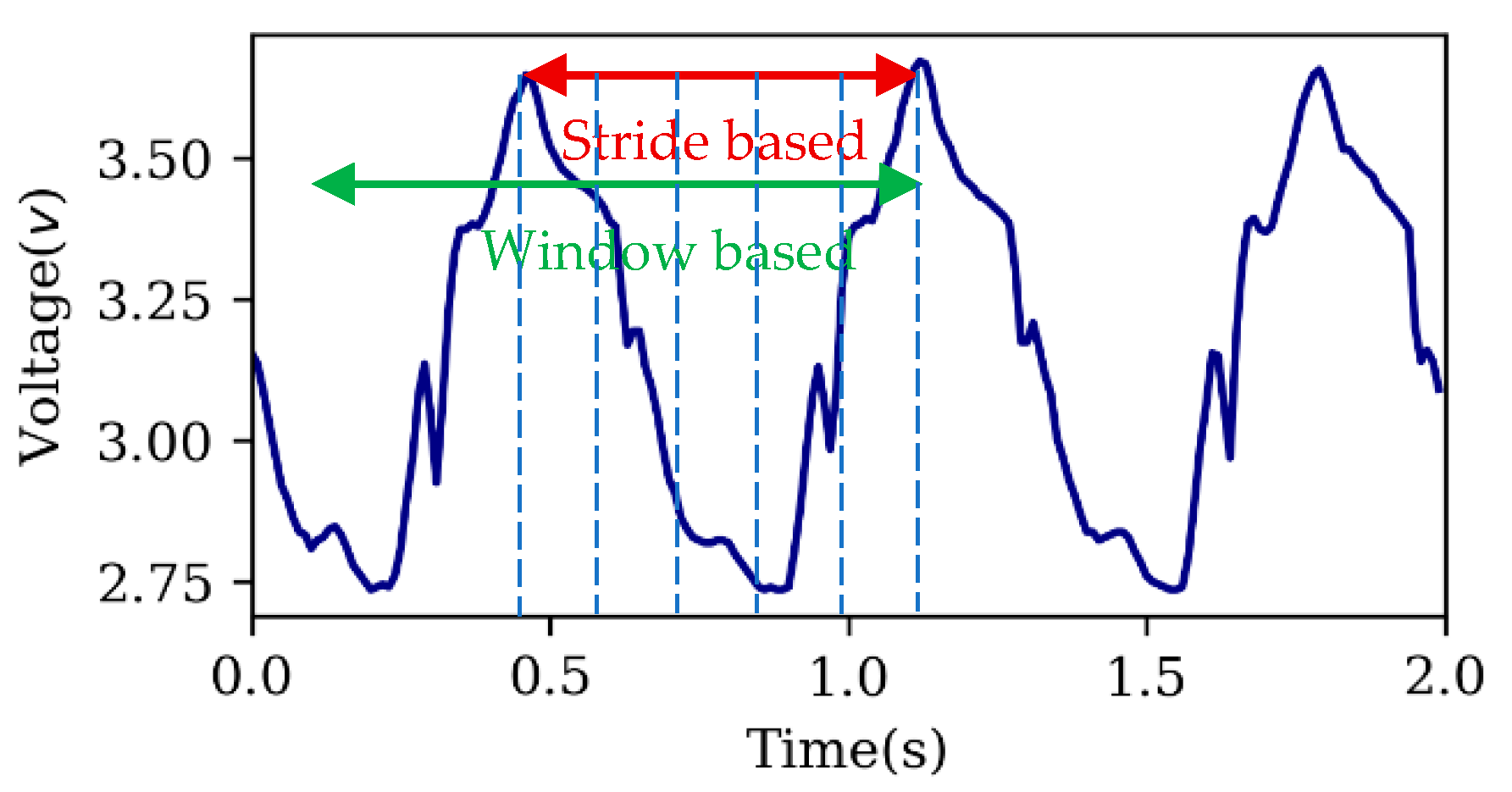
2.3. Data Segmentation
2.4. Feature Extraction
2.5. Machine Learning Algorithm
3. Results
Sensor Location Importance
4. Discussion and Conclusions
5. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- Pedisic, Z.; Shrestha, N.; Kovalchik, S.; Stamatakis, E.; Liangruenrom, N.; Grgic, J.; Titze, S.; Biddle, S.J.; Bauman, A.E.; Oja, P. Is running associated with a lower risk of all-cause, cardiovascular and cancer mortality, and is the more the better? A systematic review and meta-analysis. Br. J. Sports Med. 2019, 54, 898–905. [Google Scholar] [CrossRef] [PubMed]
- Oja, P.; Titze, S.; Kokko, S.; Kujala, U.M.; Heinonen, A.; Kelly, P.; Koski, P.; Foster, C. Health benefits of different sport disciplines for adults: Systematic review of observational and intervention studies with meta-analysis. Br. J. Sports Med. 2015, 49, 434–440. [Google Scholar] [CrossRef] [PubMed]
- Van Gent, R.N.; Siem, D.; Van Middelkoop, M.; Van Os, A.G.; Bierma-Zeinstra, S.M.A.; Koes, B.W. Incidence and determinants of lower extremity running injuries in long distance runners: A systematic review. Br. J. Sports Med. 2007, 41, 469–480. [Google Scholar] [CrossRef] [PubMed]
- Enoka, R.M.; Duchateau, J. Muscle fatigue: What, why and how it influences muscle function. J. Physiol. 2007, 586, 11–23. [Google Scholar] [CrossRef]
- Borg, G.A. Psychophysical bases of perceived exertion. Med. Sci. Sports Exerc. 1982, 14, 377–381. [Google Scholar] [CrossRef]
- Borg, G. Perceived exertion as an indicator of somatic stress. Scand. J. Rehabil. Med. 1970, 2, 92–98. [Google Scholar]
- Noehren, B.; Sanchez, Z.; Cunningham, T.; McKeon, P.O. The effect of pain on hip and knee kinematics during running in females with chronic patellofemoral pain. Gait Post. 2012, 36, 596–599. [Google Scholar] [CrossRef]
- Bazett-Jones, D.M.; Cobb, S.C.; Huddleston, W.E.; O’Connor, K.M.; Armstrong, B.S.R.; Earl-Boehm, J.E. Effect of Patellofemoral Pain on Strength and Mechanics after an Exhaustive Run. Med. Sci. Sports Exerc. 2013, 45, 1331–1339. [Google Scholar] [CrossRef]
- Dierks, T.A.; Manal, K.T.; Hamill, J.; Davis, I. Lower Extremity Kinematics in Runners with Patellofemoral Pain during a Prolonged Run. Med. Sci. Sports Exerc. 2011, 43, 693–700. [Google Scholar] [CrossRef]
- Scherr, J.; Wolfarth, B.; Christle, J.W.; Pressler, A.; Wagenpfeil, S.; Halle, M. Associations between Borg’s rating of perceived exertion and physiological measures of exercise intensity. Eur. J. Appl. Physiol. 2012, 113, 147–155. [Google Scholar] [CrossRef]
- Dantas, J.L.; Doria, C.; Rossi, H.; Rosa, G.; Pietrangelo, T.; Fanò-Illic, G.; Nakamura, F.Y. Determination of Blood Lactate Training Zone Boundaries With Rating of Perceived Exertion in Runners. J. Strength Cond. Res. 2015, 29, 315–320. [Google Scholar] [CrossRef] [PubMed]
- Steed, J.; Gaesser, G.A.; Weltman, A. Rating of perceived exertion and blood lactate concentration during submaximal running. Med. Sci. Sports Exerc. 1994, 26, 797–803. [Google Scholar] [CrossRef] [PubMed]
- Saw, A.E.; Main, L.C.; Gastin, P.B. Monitoring the athlete training response: Subjective self-reported measures trump commonly used objective measures: A systematic review. Br. J. Sports Med. 2015, 50, 281–291. [Google Scholar] [CrossRef] [PubMed]
- Impellizzeri, F.M.; Marcora, S.M.; Coutts, A.J. Internal and External Training Load: 15 Years On. Int. J. Sports Physiol. Perform. 2019, 14, 270–273. [Google Scholar] [CrossRef] [PubMed]
- Paquette, M.R.; Napier, P.C.; Willy, P.R.W.; Stellingwerff, T. Moving Beyond Weekly ‘Distance’: Optimizing Quantification of Training Load in Runners. J. Orthop. Sports Phys. Ther. 2020, 1–20. [Google Scholar] [CrossRef] [PubMed]
- Napier, C.; Ryan, M.; Menon, C.; Paquette, M.R. Session RPE in combination with training volume provides a better estimation of training responses in runners. J. Athl. Train. 2020, in press. [Google Scholar]
- Sanno, M.; Willwacher, S.; Epro, G.; Brüggemann, G.-P. Positive Work Contribution Shifts from Distal to Proximal Joints during a Prolonged Run. Med. Sci. Sports Exerc. 2018, 50, 2507–2517. [Google Scholar] [CrossRef]
- Kyröläinen, H.; Pullinen, T.; Candau, R.; Avela, J.; Huttunen, P.; Komi, P.V. Effects of marathon running on running economy and kinematics. Eur. J. Appl. Physiol. 2000, 82, 297–304. [Google Scholar] [CrossRef]
- Candau, R.; Belli, A.; Millet, G.Y.; Georges, D.; Barbier, B.; Rouillon, J.D. Energy cost and running mechanics during a treadmill run to voluntary exhaustion in humans. Eur. J. Appl. Physiol. Occup. Physiol. 1998, 77, 479–485. [Google Scholar] [CrossRef]
- Derrick, T.R.; Dereu, D.; McLean, S.P. Impacts and kinematic adjustments during an exhaustive run. Med. Sci. Sports Exerc. 2002, 34, 998–1002. [Google Scholar] [CrossRef]
- Mizrahi, J.; Verbitsky, O.; Isakov, E.; Daily, D. Effect of fatigue on leg kinematics and impact acceleration in long distance running. Hum. Mov. Sci. 2000, 19, 139–151. [Google Scholar] [CrossRef]
- Clansey, A.C.; Hanlon, M.; Wallace, E.S.; Lake, M.J. Effects of Fatigue on Running Mechanics Associated with Tibial Stress Fracture Risk. Med. Sci. Sports Exerc. 2012, 44, 1917–1923. [Google Scholar] [CrossRef]
- Derrick, T.R. The Effects of Knee Contact Angle on Impact Forces and Accelerations. Med. Sci. Sports Exerc. 2004, 36, 832–837. [Google Scholar] [CrossRef]
- Coventry, E.; O’Connor, K.M.; Hart, B.A.; Earl, J.E.; Ebersole, K.T. The effect of lower extremity fatigue on shock attenuation during single-leg landing. Clin. Biomech. 2006, 21, 1090–1097. [Google Scholar] [CrossRef] [PubMed]
- Keller, T.; Weisberger, A.; Ray, J.; Hasan, S.; Shiavi, R.; Spengler, D. Relationship between vertical ground reaction force and speed during walking, slow jogging, and running. Clin. Biomech. 1996, 11, 253–259. [Google Scholar] [CrossRef]
- Chetty, R.; Szeidl, A.; Dean, M.; Glimcher, P.W.; Rutledge, R.B.; Caplin, A. Consumption Commitments and Risk Preferences. Q. J. Econ. 2007, 122, 831–877. [Google Scholar] [CrossRef]
- Koblbauer, I.F.; Van Schooten, K.S.; Verhagen, E.A.; Van Dieën, J.H. Kinematic changes during running-induced fatigue and relations with core endurance in novice runners. J. Sci. Med. Sport 2014, 17, 419–424. [Google Scholar] [CrossRef]
- Girard, O.; Millet, G.P.; Micallef, J.P.; Slawinski, J.; Racinais, S. Changes in Running Mechanics and Spring-Mass Behaviour during a 5-km Time Trial. Int. J. Sports Med. 2013, 34, 832–840. [Google Scholar] [CrossRef]
- Gerlach, K.E.; White, S.C.; Burton, H.W.; Dorn, J.M.; Leddy, J.J.; Horvath, P.J. Kinetic Changes with Fatigue and Relationship to Injury in Female Runners. Med. Sci. Sports Exerc. 2005, 37, 657–663. [Google Scholar] [CrossRef]
- Mizrahi, J.; Voloshin, A.; Russek, D.; Verbitsky, O.; Isakov, E. The influence of fatigue on EMG and impact acceleration in running. Basic Appl. Myol. 1997, 7, 111–118. [Google Scholar]
- Jewell, C.; Hamill, J.; Von Tscharner, V.; Boyer, K.A. Altered multi-muscle coordination patterns in habitual forefoot runners during a prolonged, exhaustive run. Eur. J. Sport Sci. 2019, 19, 1062–1071. [Google Scholar] [CrossRef] [PubMed]
- Wakeling, J.M.; Pascual, S.A.; Nigg, B.M.; Tscharner, V. Surface EMG shows distinct populations of muscle activity when measured during sustained sub-maximal exercise. Eur. J. Appl. Physiol. 2001, 86, 40–47. [Google Scholar] [CrossRef] [PubMed]
- Winter, S.C.; Gordon, S.; Watt, K. Effects of fatigue on kinematics and kinetics during overground running: A systematic review. J. Sports Med. Phys. Fit. 2016, 57, 887–899. [Google Scholar]
- Strohrmann, C.; Rossi, M.; Arnrich, B.; Tröster, G. A Data-Driven Approach to Kinematic Analysis in Running Using Wearable Technology. In Proceedings of the 2012 Ninth International Conference on Wearable and Implantable Body Sensor Networks, London, UK, 9–12 May 2012; pp. 118–123. [Google Scholar]
- Buckley, C.; O’Reilly, M.; Whelan, D.; Farrell, A.V.; Clark, L.; Longo, V.; Gilchrist, M.; Caulfield, B.; O’Reilly, M.A. Binary classification of running fatigue using a single inertial measurement unit. In Proceedings of the 2017 IEEE 14th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Eindhoven, The Netherlands, 9–12 May 2017; pp. 197–201. [Google Scholar]
- Baghdadi, A.; Megahed, F.M.; Esfahani, E.T.; Cavuoto, L.A. A machine learning approach to detect changes in gait parameters following a fatiguing occupational task. Ergon 2018, 61, 1116–1129. [Google Scholar] [CrossRef] [PubMed]
- Karg, M.; Venture, G.; Hoey, J.; Kulić, D. Human Movement Analysis as a Measure for Fatigue: A Hidden Markov-Based Approach. IEEE Trans. Neural Syst. Rehab. Eng. 2014, 22, 470–481. [Google Scholar] [CrossRef]
- Gholami, M.; Rezaei, A.; Cuthbert, T.J.; Napier, C.; Menon, C. Lower Body Kinematics Monitoring in Running Using Fabric-Based Wearable Sensors and Deep Convolutional Neural Networks. Sensors 2019, 19, 5325. [Google Scholar] [CrossRef]
- Gholami, M.; Ejupi, A.; Rezaei, A.; Ferrone, A.; Menon, C. Estimation of Knee Joint Angle Using a Fabric-Based Strain Sensor and Machine Learning: A Preliminary Investigation. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 589–594. [Google Scholar]
- Totaro, M.; Poliero, T.; Mondini, A.; Lucarotti, C.; Cairoli, G.; Ortiz, J.; Beccai, L. Soft Smart Garments for Lower Limb Joint Position Analysis. Sensors 2017, 17, 2314. [Google Scholar] [CrossRef]
- Rezaei, A.; Cuthbert, T.J.; Gholami, M.; Menon, C. Application-Based Production and Testing of a Core-Sheath Fiber Strain Sensor for Wearable Electronics: Feasibility Study of Using the Sensors in Measuring Tri-Axial Trunk Motion Angles. Sensors 2019, 19, 4288. [Google Scholar] [CrossRef]
- Mattmann, C.; Amft, O.; Harms, H.; Troster, G.; Clemens, F. Recognizing Upper Body Postures using Textile Strain Sensors. In Proceedings of the 2007 11th IEEE International Symposium on Wearable Computers, Boston, MA, USA, 11–13 October 2007; pp. 29–36. [Google Scholar]
- Ferrone, A.; Jiang, X.; Maiolo, L.; Pecora, A.; Colace, L.; Menon, C. A fabric-based wearable band for hand gesture recognition based on filament strain sensors: A preliminary investigation. In Proceedings of the 2016 IEEE Healthcare Innovation Point-Of-Care Technologies Conference (HI-POCT), Cancun, Mexico, 9–11 November 2016; pp. 113–116. [Google Scholar]
- Amjadi, M.; Kyung, K.-U.; Park, I.; Sitti, M. Stretchable, Skin-Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Almonroeder, T.G.; Benson, L.C. Sex differences in lower extremity kinematics and patellofemoral kinetics during running. J. Sports Sci. 2016, 35, 1–7. [Google Scholar] [CrossRef]
- Harrison, K.D.; Thakkar, B.; Kwon, Y.U.; Crosswell, G.; Morgan, J.; Williams, D.B. Kinematic predictors of loading during running differ by demographic group. Phys. Ther. Sport 2018, 32, 221–226. [Google Scholar] [CrossRef]
- Rezaei, A.; Ejupi, A.; Gholami, M.; Ferrone, A.; Menon, C. Preliminary Investigation of Textile-Based Strain Sensors for the Detection of Human Gait Phases Using Machine Learning. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 563–568. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and regression by randomforest. R News 2002, 2, 18–22. [Google Scholar]
- Khan, T.; Lundgren, L.; Järpe, E.; Olsson, C.; Viberg, P. A Novel Method for Classification of Running Fatigue Using Change-Point Segmentation. Sensors 2019, 19, 4729. [Google Scholar] [CrossRef] [PubMed]
- Napier, C.; Esculier, J.-F.; Hunt, M.A. Gait retraining: Out of the lab and onto the streets with the benefit of wearables. Br. J. Sports Med. 2017, 51, 1642–1643. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Lockhart, T.E.; Soangra, R. Classifying lower extremity muscle fatigue during walking using machine learning and inertial sensors. Ann. Biomed. Eng. 2013, 42, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Staiano, W.; Bosio, A.; de Morree, H.M.; Rampinini, E.; Marcora, S. Chapter 11 The cardinal exercise stopper: Muscle fatigue, muscle pain or perception of effort? In Progress in Brain Research; Marcora, S., Sarkar, M., Eds.; Elsevier: Amsterdam, The Netherlands, 2018; Volume 240, pp. 175–200. [Google Scholar]
- Noakes, T.D. Fatigue is a Brain-Derived Emotion that Regulates the Exercise Behavior to Ensure the Protection of Whole Body Homeostasis. Front. Physiol. 2012, 3, 3. [Google Scholar] [CrossRef]
- Halperin, I.; Emanuel, A. Rating of Perceived Effort: Methodological Concerns and Future Directions. Sports Med. 2019, 50, 679–687. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Condition |
|---|---|
| Linearity | Highly linear < 30% strain |
| Hysteresis | Zero for < 30% strain |
| Frequency response | up to 10 Hz |
| Gauge factor | 5 |
| Signal drift | No drift up to 4 h |
| Participant 1 | Participant 2 | Participant 3 | Participant 4 | Participant 5 | Average | |
|---|---|---|---|---|---|---|
| R2 | 0.97 (0.03) | 0.93 (0.01) | 0.98 (0.01) | 0.98 (0.01) | 0.95 (0.01) | 0.96 (0.02) |
| RMSE | 0.18 (0.22) | 0.02 (0.00) | 0.02 (0.01) | 0.02 (0.01) | 0.06 (0.02) | 0.06 (0.06) |
| Hip Sensors | Knee Sensors | Ankle Sensors | |
|---|---|---|---|
| R2 | 0.95 (0.02) | 0.10 (0.42) | 0.29 (0.81) |
| RMSE | 0.08 (0.08) | 0.44 (0.50) | 0.34 (0.20) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gholami, M.; Napier, C.; Patiño, A.G.; Cuthbert, T.J.; Menon, C. Fatigue Monitoring in Running Using Flexible Textile Wearable Sensors. Sensors 2020, 20, 5573. https://doi.org/10.3390/s20195573
Gholami M, Napier C, Patiño AG, Cuthbert TJ, Menon C. Fatigue Monitoring in Running Using Flexible Textile Wearable Sensors. Sensors. 2020; 20(19):5573. https://doi.org/10.3390/s20195573
Chicago/Turabian StyleGholami, Mohsen, Christopher Napier, Astrid García Patiño, Tyler J. Cuthbert, and Carlo Menon. 2020. "Fatigue Monitoring in Running Using Flexible Textile Wearable Sensors" Sensors 20, no. 19: 5573. https://doi.org/10.3390/s20195573
APA StyleGholami, M., Napier, C., Patiño, A. G., Cuthbert, T. J., & Menon, C. (2020). Fatigue Monitoring in Running Using Flexible Textile Wearable Sensors. Sensors, 20(19), 5573. https://doi.org/10.3390/s20195573