Pollution Weather Prediction System: Smart Outdoor Pollution Monitoring and Prediction for Healthy Breathing and Living

 ,
, 
 , ,
, ,  ,
,  ,
, 
Abstract
1. Introduction and Related Works
2. The Necessity of the PWP System
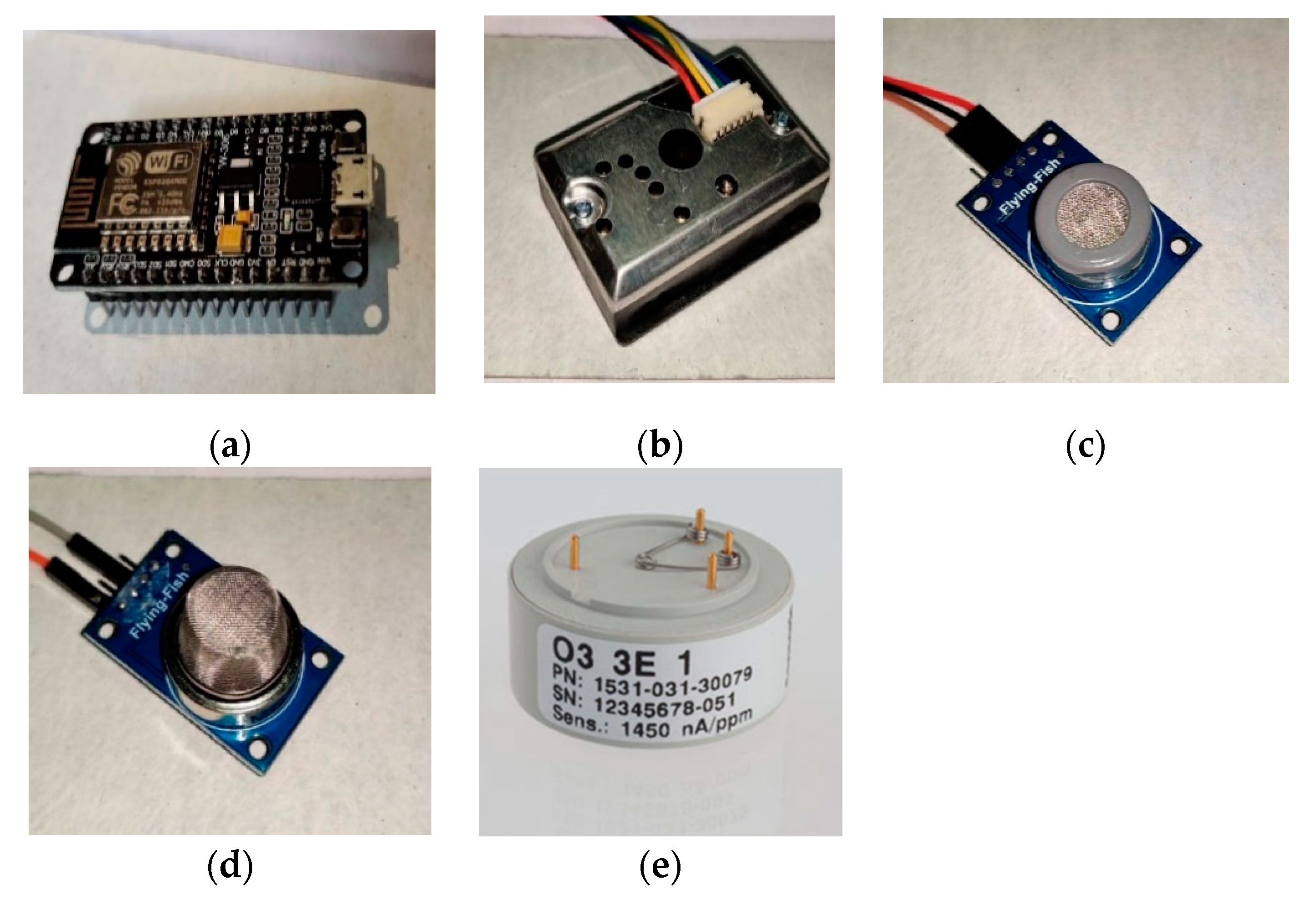
2.1. Details of the Controller and Sensors
2.1.1. ESP8266 12E/NodeMCU Controller
2.1.2. SDS021 Particulate Matter Sensing Unit
2.1.3. MQ07-CO Carbon Monoxide (CO) Sensing Unit
2.1.4. NO2-B43F Nitrogen Dioxide Sensing Unit
2.1.5. Aeroqual Ozone (O3) Sensing Unit
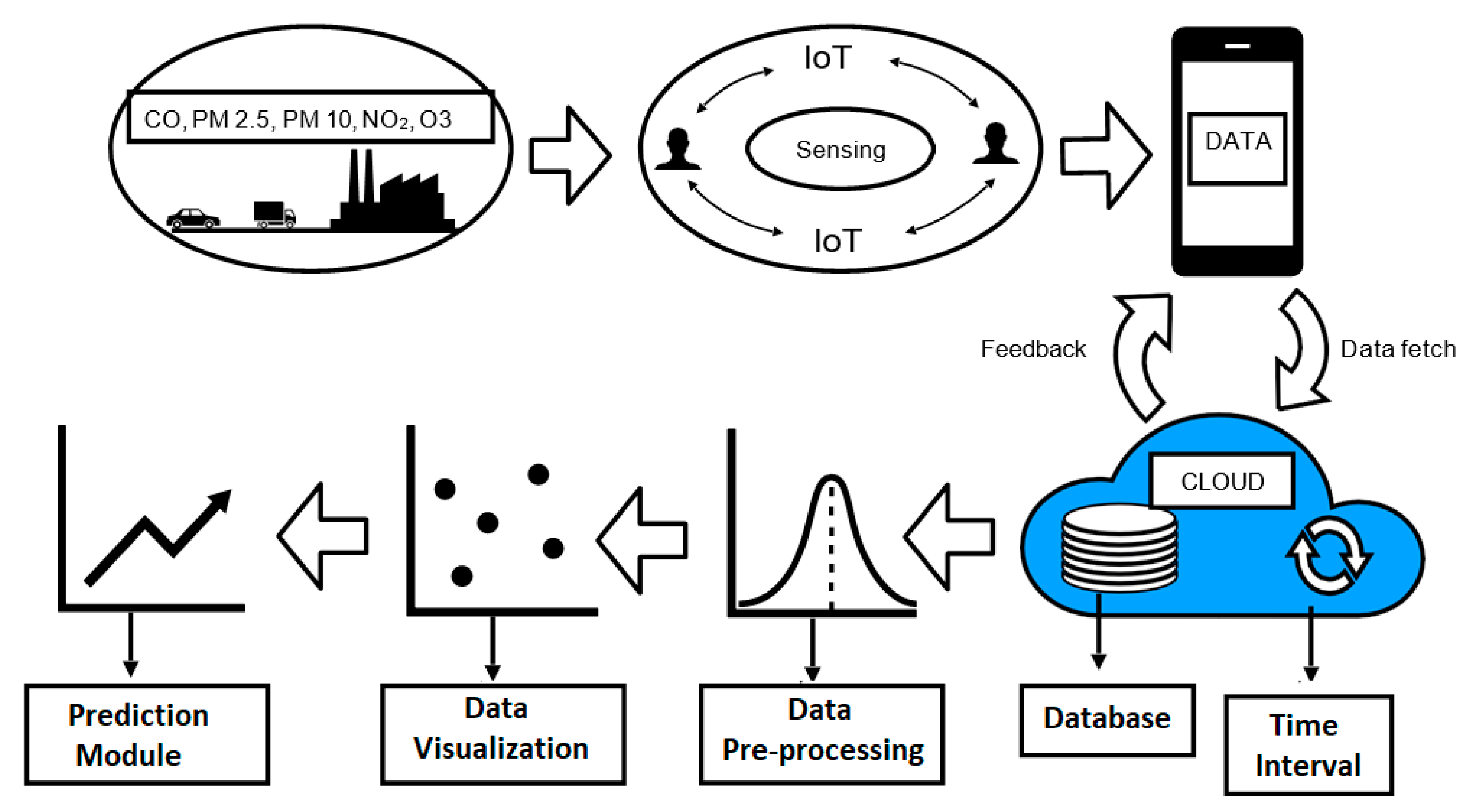
2.2. Layered Architecture of an IoT-Based Air Quality Monitoring System
2.2.1. Physical Sensing Layer
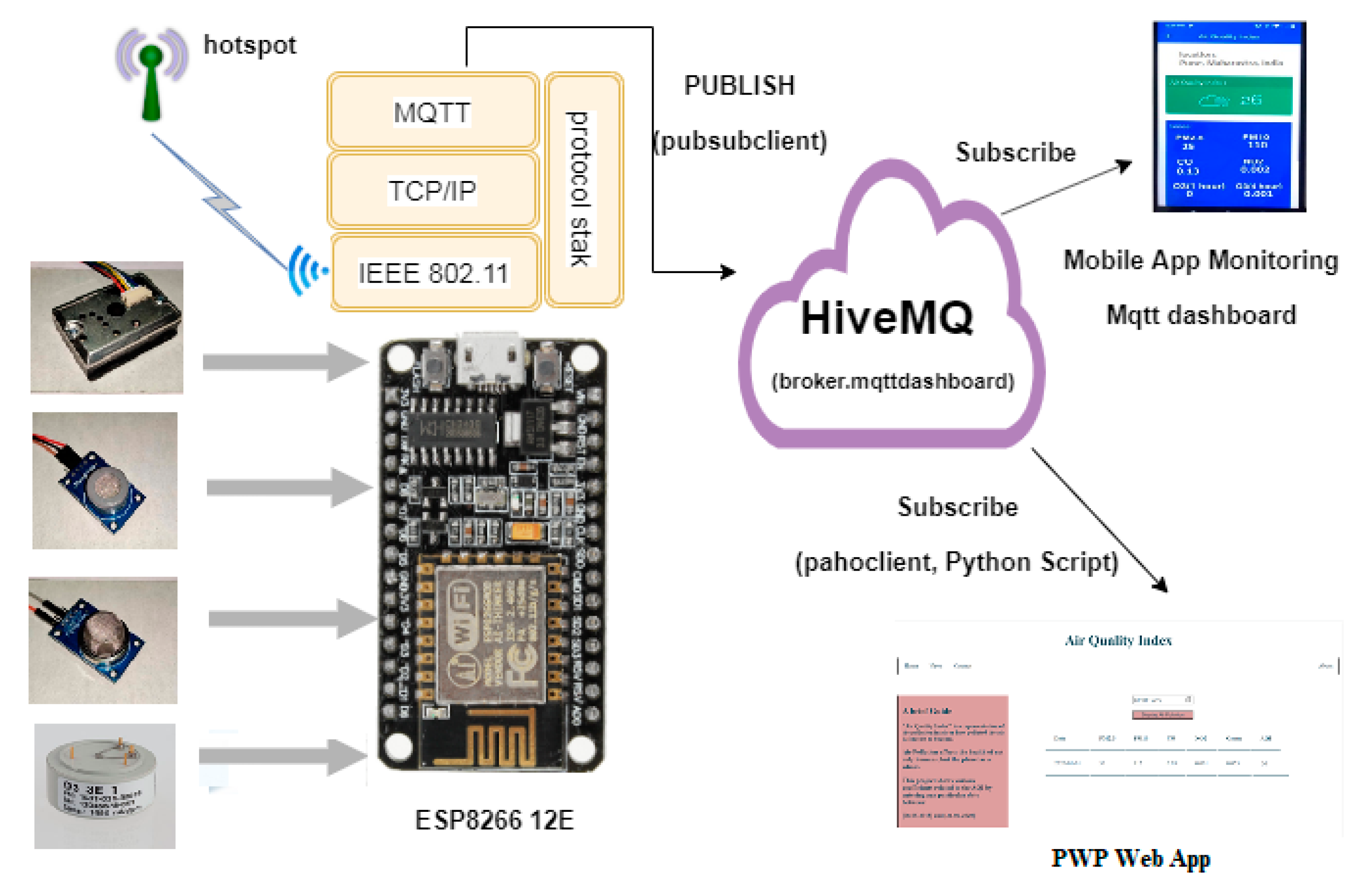
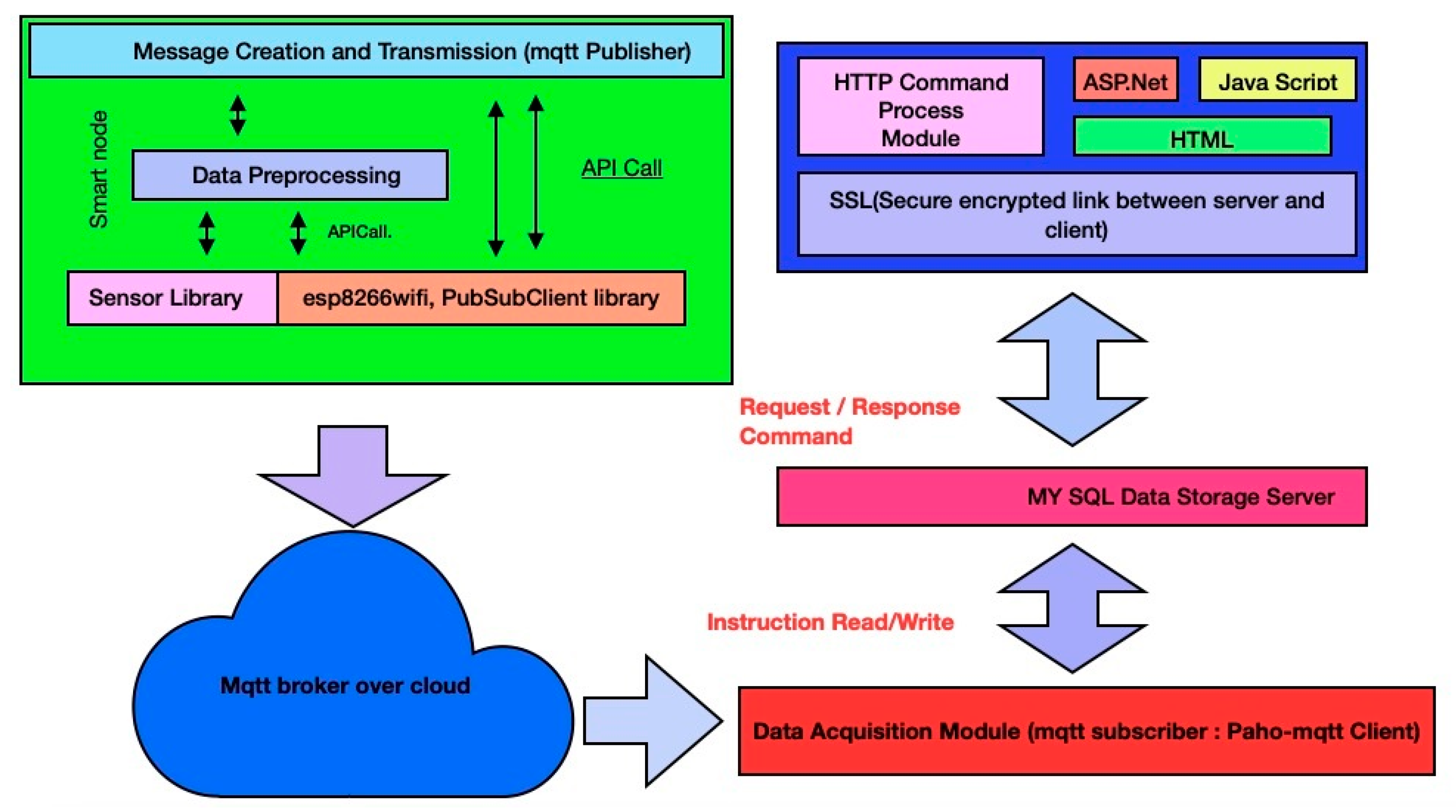
2.2.2. Communication and Networking Layer
2.2.3. Data Analysis Layer
Data Preprocessing
2.2.4. Data Prediction Layer
- Select the type of machine-learning network for the kind of regression problem to be resolved, such as identifying a PWP system for an air pollutant gas estimator. One of the best solutions for that purpose is to use a multilayered machine-learning perceptron network.
- Data preprocessing: The data gathered for this study consists of a set of 189,648 training sample instances; each instance being composed of six variables. All variables were initially expressed in ppm, such as NO2, PM2.5, PM10, CO, O2, and O3. The sample data was later normalized into [0.1, 0.9] the interval, which streamlined the ANN model’s learning.
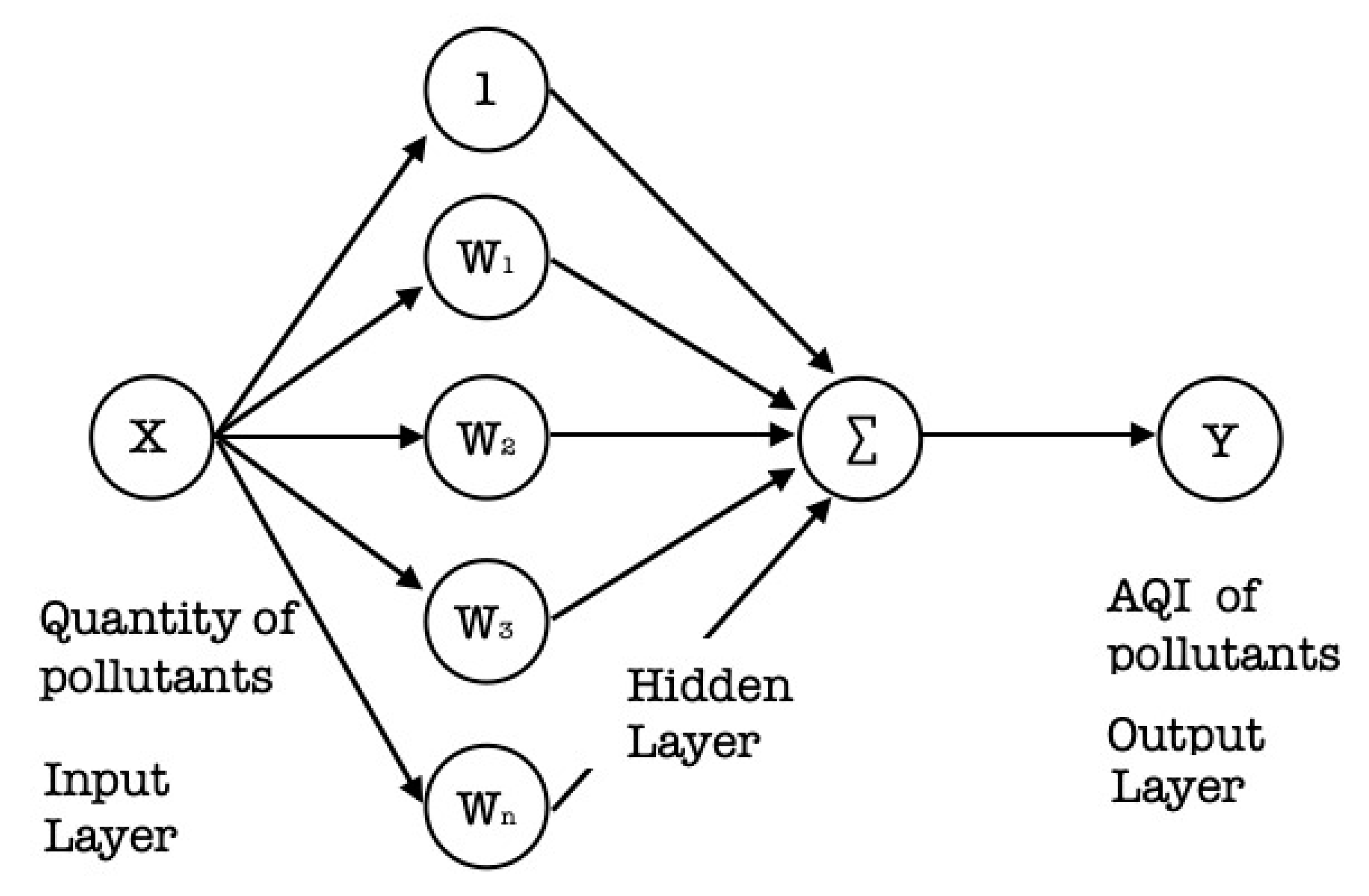
- ANN Model design: There are numbers of machine-learning architectures to select from, each having its particular parameters and compensations for its specific problem. One of the most widespread machine-learning models is the feed-forward multilayered perceptron. In this network, the ANN model consists of 7 layers: an input layer, five hidden layers, and an output layer. The hidden layers contain 512, 512, 256, 128, and 64 neurons, respectively. The final layer includes a single output neuron. The hidden layers consist of all the probable networks between the input to the output layer and allow for a combined impact of multiple independent variables on the output layer. The first input layer relates to the independent variables (NO2, PM2.5, PM10, CO, O2, and O3), while the final output layer corresponds to the dependent variable score of the PWP system for air pollutant gases. To achieve the final architecture mixture, such as setting the size and number of the hidden layers, we were accompanied by a cross-validation method. The architecture used in the undertaken study is a customized multilayered ANN model, as shown in Figure 8. To build a customized ANN model to predict the AQI values of various pollutants, various parameters such as the activation function, error functions, and optimizers must be configured. In the undertaken study, the rectilinear unit (ReLU) was used as an activation function; a mean absolute and mean squared error was chosen as the error function. Furthermore, adam was chosen as an optimizer. In the end, the number of neurons and hidden layers were selected based on the size and features of the dataset, as represented in Table 7. To set the weights for all the nodes in the ANN, a backpropagation technique was employed. The learning rate was set to 0.2, and the momentum term was 0.3. The ANN training was stopped when the mean squared errors (MSE) reached below 0.001.
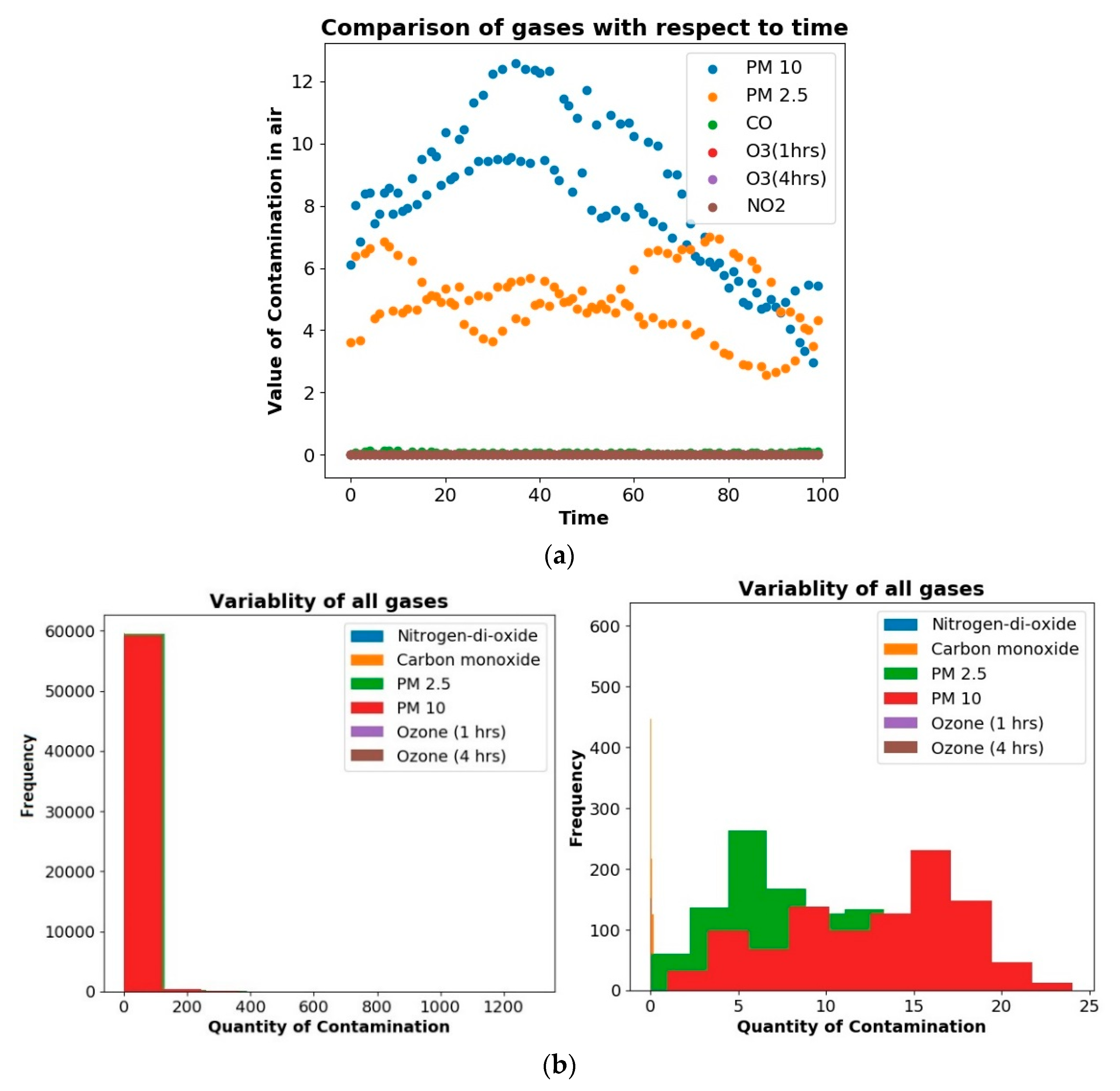
3. Results and Discussion
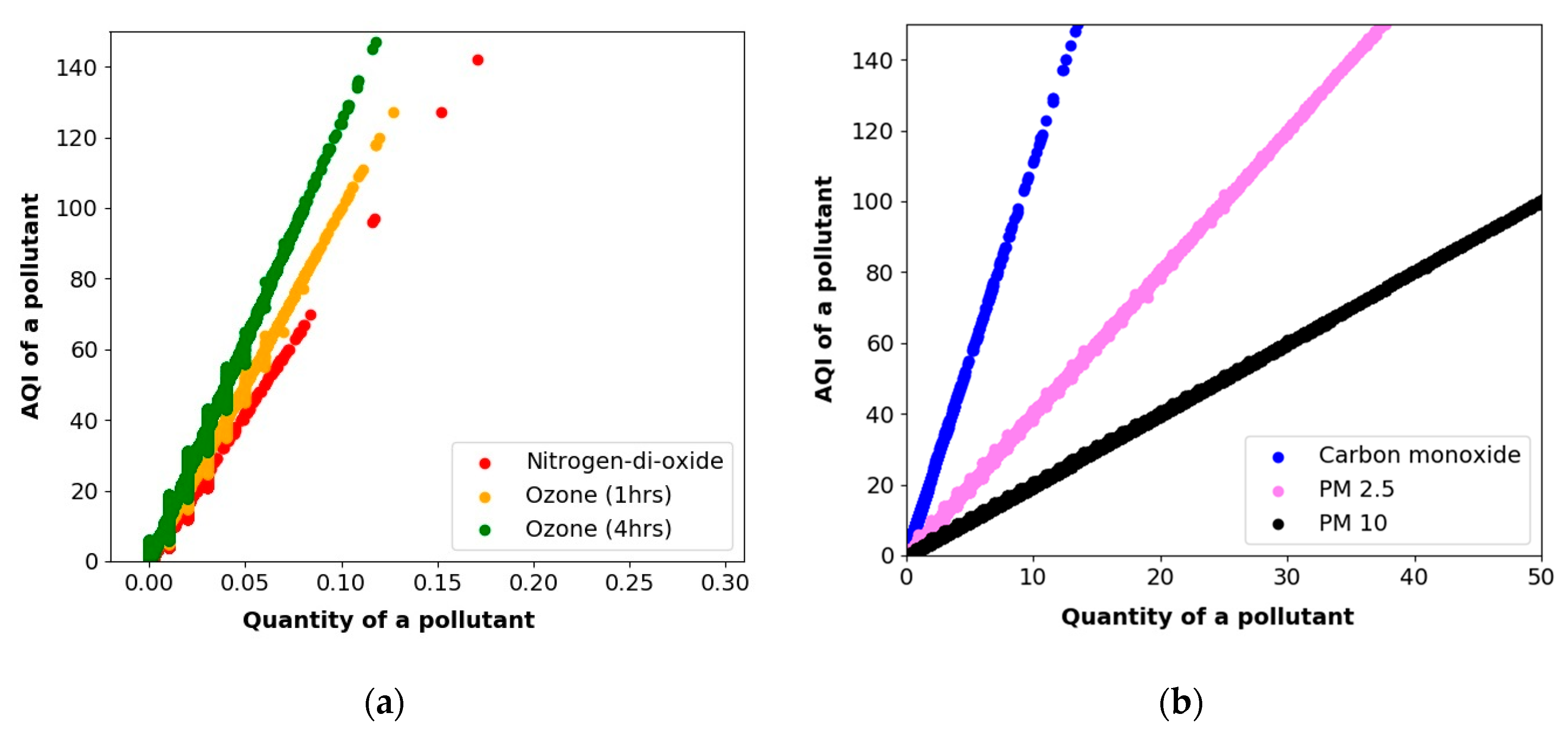
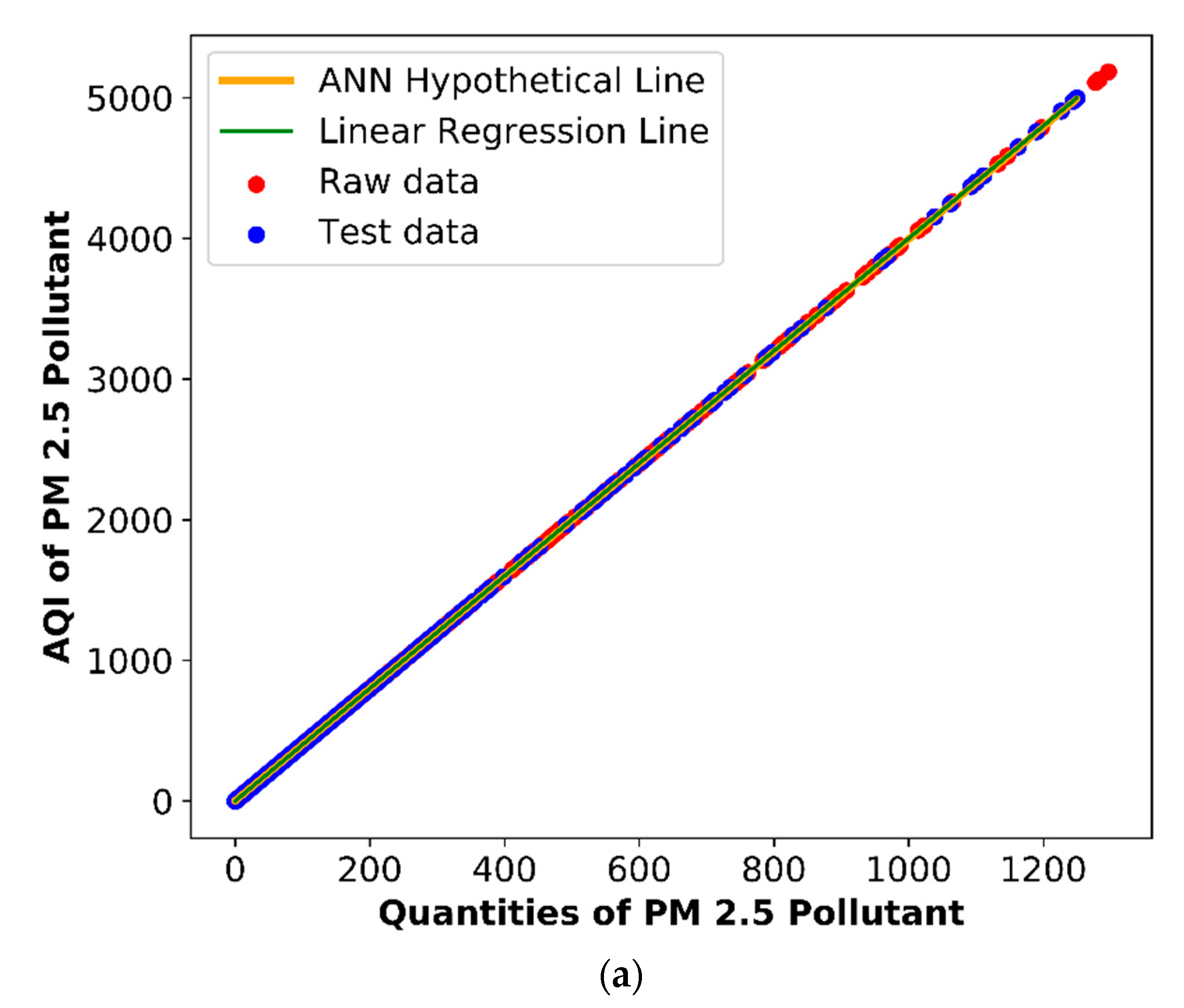
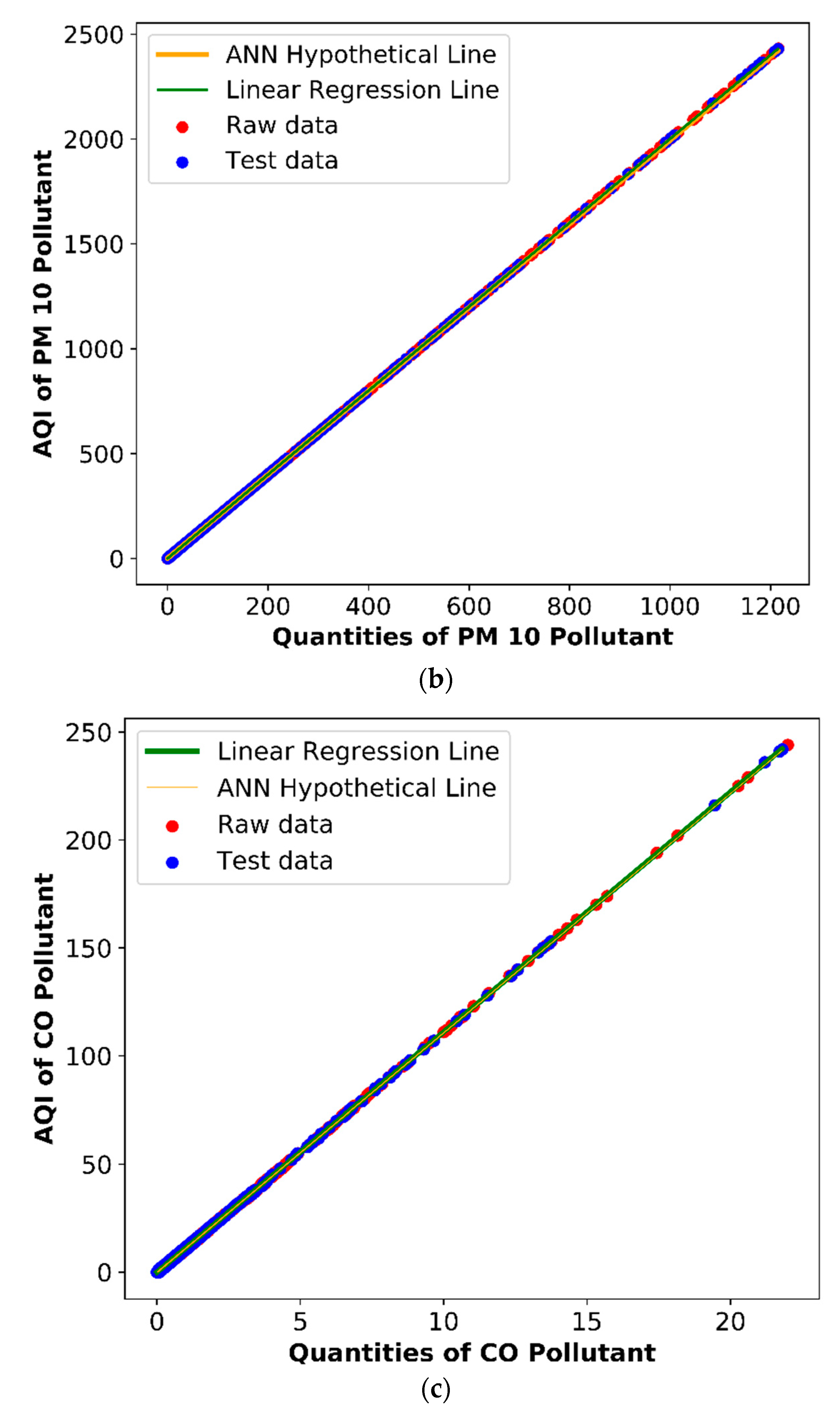
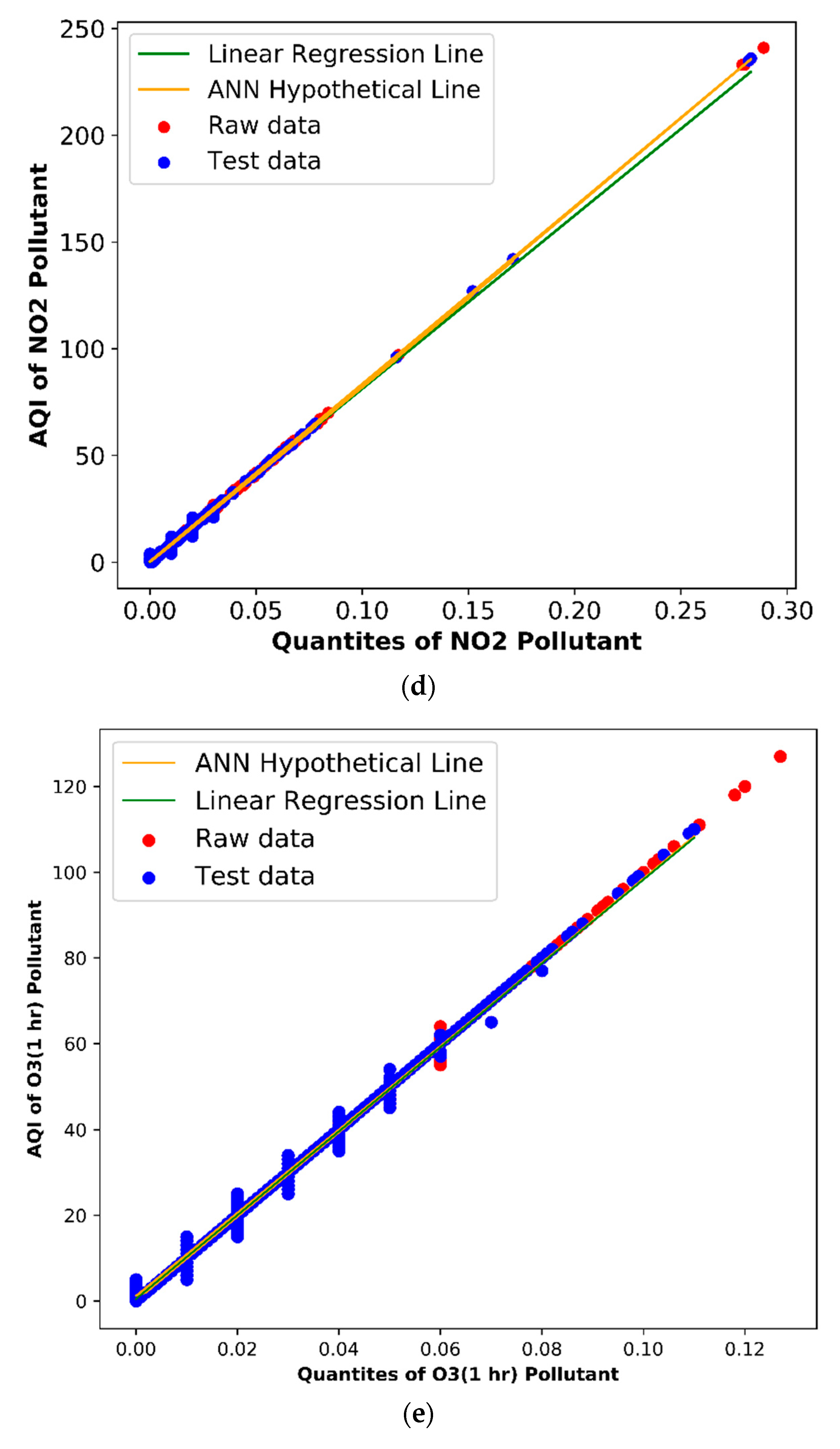
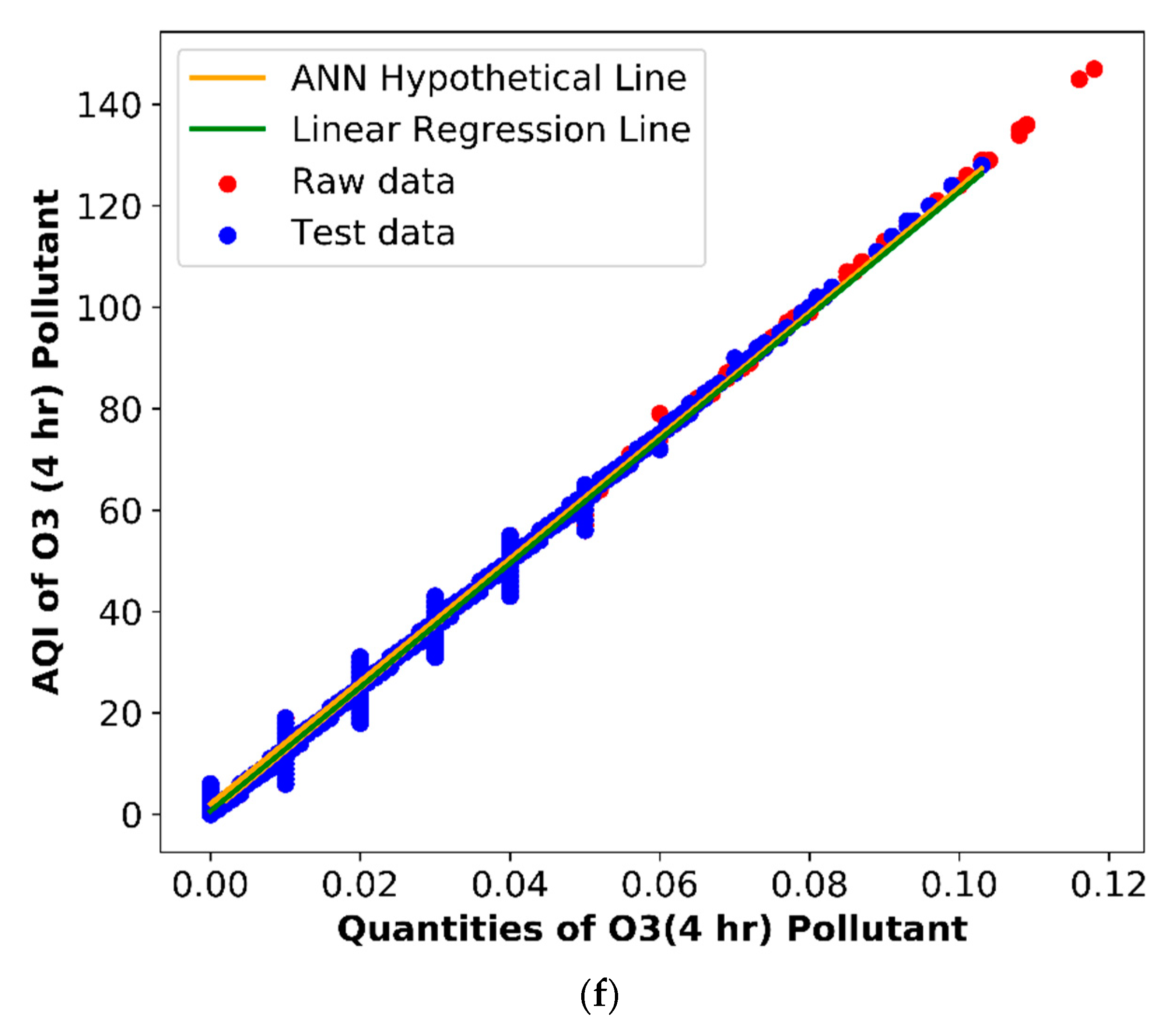
3.1. Air Pollution Prediction Using a Linear Regression Methodology
3.2. Air Pollution Prediction Using Artificial Neural Networks
3.3. PWPS Web and Mobile Interface
4. Conclusions and Future Work Discussion
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix A1. Air Quality Monitoring
Appendix A2. Air Quality Index
Appendix A3. Air Monitoring Stations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Terminologies | Description |
|---|---|
| K | In Kelvin degrees |
| Ppb | Parts per billion |
| AQI | Air Quality Index |
| mg/m3 | one milligram per cubic meter |
| ug/m3 | one microgram per cubic meter |
| SGD | Stochastic Gradient Descent |
| MQTT | Message Queuing Telemetry Transport |
| ANN | Artificial Neural Network |
| PM | Particulate Matter |
| PWP | Pollution Weather Prediction System |
| AQHI | Air Quality Health Index |
| hPA | Atmospheric Pressure |
| LR | Linear Regression |
| RR | Ridge Regression |
| Lasso | Lasso Regression |
| Bayes | Bayesian Linear Regression |
| Huber | Huber Regression |
| Lars | Least-Angle Regression |
| Lasso-lars | Lasso and Least-Angle Regression |
| SGD | Stochastic Gradient Descent |
| ElasticNet | Elastic Net Regression |
| QoS | Quality of Service |
| IoT | Internet of Things |
| GUSTO | Generic Ultraviolet Sensors Technologies and Observations |
References
- The Lancet—Global, Regional, and National Comparative Risk Assessment of 84 Behavioral, Environmental and Occupational, and Metabolic Risks or Clusters of Risks for 195 Countries and Territories, 1990–2017: A Systematic Analysis for the Global Burden of Disease Study. Available online: https://www.thelancet.com/action/showPdf?pii=S0140-6736%2818%2932225-6 (accessed on 31 August 2020).
- Health Effects Institute—State of Global Air 2019; Special Report; Health Effects Institute: Boston, MA, USA, 2019; Available online: https://www.stateofglobalair.org/report (accessed on 31 August 2020).
- World Health Organization—How Air Pollution is Destroying Our Health. Available online: https://www.who.int/airpollution/news-and-events/how-air-pollution-is-destroying-our-health (accessed on 12 March 2020).
- World Health Organization—Air Pollution. Available online: https://www.who.int/health-topics/air-pollution#tab=tab_1 (accessed on 11 March 2020).
- Mamta, P.; Bassin, J.K. Analysis of ambient air quality using air quality index. Int. J. Adv. Eng. Technol. 2010, 1, 106–114. [Google Scholar]
- Kyrkilis, G.; Chaloulakou, A.; Kassomenos, P.A. Development of an aggregate Air Quality Index for an urban Mediterranean agglomeration: Relation to potential health effects. Environ. Int. 2007, 33, 670–676. [Google Scholar] [CrossRef]
- Kumar, A.; Goyal, P. Forecasting of daily air quality index in Delhi. Sci. Total Environ. 2011, 409, 5517–5523. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, F. Fine particulate matter (PM2.5) in China at a city level. Sci. Rep. 2015, 5, 14884. [Google Scholar] [CrossRef] [PubMed]
- Reche, C.; Querol, X.; Alastuey, A.; Viana, M.; Pey, J.; Moreno, T.; Rodríguez, S.; González, Y.; Fernández-Camacho, R.; Rosa, J.; et al. New considerations for PM, Black Carbon and particle number concentration for air quality monitoring across different European cities. Atmos. Chem. Phys. 2011, 11, 6207–6227. [Google Scholar] [CrossRef]
- Anenberg, S.C.; Schwartz, J.; Shindell, D.; Amann, M.; Faluvegi, G.; Klimont, Z.; Janssens-Maenhout, G.; Pozzoli, L.; Van Dingenen, R.; Vignati, E.; et al. Global air quality and health Co-benefits of mitigating near-term climate change through methane and black carbon emission controls. Environ. Health Perspect. 2012, 120, 6. [Google Scholar] [CrossRef] [PubMed]
- Xu, W.; Cheng, C.; Guo, D.; Chen, X.; Yuan, H.; Yang, R.; Liu, Y. PM2.5 Air Quality Index Prediction Using an Ensemble Learning Model. In International Conference on Web-Age Information Management; Springer: Cham, Switzerland, 2014; pp. 119–129. [Google Scholar]
- Vicente, A.B.; Sanfeliu, T.; Jordan, M.M. Assessment of PM10 pollution episodes in a ceramic cluster (NE Spain): Proposal of a new quality index for PM10, As, Cd, Ni, and Pb. J. Environ. Manag. 2012, 108, 92–101. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Sowlat, M.H.; Gharibi, H.; Yunesian, M.; Mahmoudi, M.T.; Lotfi, S. A novel, fuzzy-based air quality index (FAQI) for air quality assessment. Atmos. Environ. 2011, 45, 2050–2059. [Google Scholar] [CrossRef]
- Chen, P. Visualization of real-time monitoring datagraphic of urban environmental quality. J. Image Video Proc. 2019, 2019, 42. [Google Scholar] [CrossRef]
- Gurjar, B.R.; Butler, T.M.; Lawrence, M.G.; Lelieveld, J. Evaluation of emissions and air quality in megacities. Atmos. Environ. 2008, 42, 1593–1606. [Google Scholar] [CrossRef]
- Jiang, W.; Wang, Y.; Tsou, M.H.; Fu, X. Using Social Media to Detect Outdoor Air Pollution and Monitor Air Quality Index (AQI): A Geo-Targeted Spatiotemporal Analysis Framework with Sina Weibo (Chinese Twitter). PLoS ONE 2015, 10, e0141185. [Google Scholar] [CrossRef] [PubMed]
- Chen, R.; Wang, X.; Meng, X.; Hua, J.; Zhou, Z.; Chen, B.; Kan, H. Communicating air pollution-related health risks to the public: An application of the Air Quality Health Index in Shanghai, China. Environ. Int. 2013, 51, 168–173. [Google Scholar] [CrossRef] [PubMed]
- Xi, X.; Wei, Z.; Rui, X.G.; Wang, Y.J.; Bai, X.X.; Yin, W.J.; Dong, J. A Comprehensive Evaluation of Air Pollution Prediction Improvement by a Machine Learning Method. In Proceedings of the 2015 IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI), Hammamet, Tunisia, 15–17 November 2015; pp. 176–181. [Google Scholar]
- Dragomir, E.G. Air quality index prediction using K-nearest neighbor technique. In Bulletin of PG University of Ploiesti; Series Mathematics, Informatics, Physics, LXII; 2011; pp. 103–108. Available online: http://bmif.unde.ro/docs/20101/pdf_final_12%20EDragomir.pdf (accessed on 31 August 2020).
- Suo, C.; Li, Y.P.; Sun, J.; Yin, S. An air quality index-based multistage type-2-fuzzy interval-stochastic programming model for energy and environmental systems management under multiple uncertainties. Environ. Res. 2018, 167, 98–114. [Google Scholar] [CrossRef] [PubMed]
- Shen, F.; XinleiGe, J.; Hu, J.; Dongyang, N.; Tian, L.; Chen, M. Air pollution characteristics and health risks in Henan Province, China. Environ. Res. 2017, 156, 625–634. [Google Scholar] [CrossRef]
- Al-Ali, R.; Zualkernan, I.; Aloul, F. A Mobile GPRS-Sensors Array for Air Pollution Monitoring. IEEE Sens. J. 2010, 10, 1666–1671. [Google Scholar] [CrossRef]
- Devarakonda, S.; ParveenSevusu, H.; Liu, R.; Liu, L.; Iftode, L. Real-time Air Quality Monitoring through Mobile Sensing in Metropolitan Areas. In Proceedings of the 2nd ACM SIGKDD International Workshop on Urban Computing, Chicago, IL, USA, 11 August 2013. [Google Scholar]
- Arfire, M.A.; Martinoli, A. High resolution air pollution maps in urban environments using mobile sensor networks. In Proceedings of the 2015 International Conference on Distributed Computing in Sensor Systems, Fortaleza, Brazil, 10–12 June 2015; pp. 11–20. [Google Scholar]
- Abraham, S.; Xinrong, L. A Cost-Effective Wireless Sensor Network System for Indoor Air Quality Monitoring Applications. Procedia Comput. Sci. 2014, 34, 165–171. [Google Scholar] [CrossRef]
- Antonić, A.; Marjanović, M.; Pripužić, K.; Žarko, I.P. Amobilecrowd sensing ecosystem enabled by cupus: Cloud-based publish/subscribe middleware for the internet of things. Future Gener. Comput. Syst. 2016, 56, 607–622. [Google Scholar] [CrossRef]
- Kumar, U.; Jain, V. Arima forecasting of ambient air pollutants (O3, NO, No2 and CO). Stoch. Environ. Res. Risk Assess. 2010, 24, 751–760. [Google Scholar] [CrossRef]
- Al-Haija, A.; Al-Qadeeb, H.; Al-Lwaimi, A. 2013.Case Study: Monitoring of AIR quality in King Faisal University using a microcontroller and WSN. Procedia Comput. Sci. 2013, 21, 517–521. [Google Scholar] [CrossRef]
- Shi, X.; Zhao, C.; Qin, K.; Yang, Y.; Zhang, K.; Fan, H. A case study of pollution process in north china region using reanalysis meteorology. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 3. [Google Scholar] [CrossRef]
- Atlan, Tracking Air Pollution in Delhi. 2014. Available online: https://blog.socialcops.com/engineering/tracking-air-pollution-in-delhi (accessed on 12 June 2020).
- Egondi, T.; Muindi, K.; Kyobutungi, C.; Gatari, M.; Rocklöv, J. Measuring exposure levels of inhalable airborne particles (PM2. 5) in two socially deprived areas of Nairobi, Kenya. Environ. Res. 2016, 148, 500–506. [Google Scholar] [CrossRef] [PubMed]
- Shi, X.; Zhao, C.; Jiang, J.H.; Wang, C.; Yang, X.; Yung, Y.L. Spatial representativeness of PM2.5 concentrations obtained using observations from network stations. J. Geophys. Res. Atmos. 2018, 123, 3145–3158. [Google Scholar] [CrossRef]
- Zhang, K.; Zhao, C.; Fan, H.; Yang, Y.; Sun, Y. Toward understanding the differences of pm 2.5 characteristics among five china urban cities. Asia-Pac. J. Atmos. Sci. 2019, 56, 493–502. [Google Scholar] [CrossRef]
- Marques, G.; Pires, I.M.; Miranda, N.; Pitarma, R. Air quality monitoring using assistive robots for ambient assisted living and enhanced living environments through Internet of things. Electronics 2019, 8, 1375. [Google Scholar] [CrossRef]
- Kim, D.; Kim, J.; Jeong, J. Estimation of health benefits from air quality improvement using the MODIS AOD dataset in Seoul, Korea. Environ. Res. 2019, 173, 452–461. [Google Scholar] [CrossRef]
- Chew, R.; Thornburg, J.; Jack, D.; Smith, C.; Yang, Q.; Chillrud, S. Identification of bicycling periods using the MicroPEM personal exposure monitor. Sensors 2019, 19, 4613. [Google Scholar] [CrossRef] [PubMed]
- Setiono, A.; Bertke, M.; Nyang’au, W.O.; Xu, J.; Fahrbach, M.; Kirsch, I.; Uhde, E.; Deutschinger, A.; Fantner, E.J.; Schwalb, C.H.; et al. In-Plane and Out-of-Plane MEMS piezoresistive cantilever sensors for nanoparticle mass detection. Sensors 2020, 20, 618. [Google Scholar] [CrossRef]
- Li, M.; Wang, W.L.; Wang, Z.Y.; Xue, Y. Prediction of PM2.5 concentration based on the similarity in air quality monitoring network. Build. Environ. 2018, 137, 11–17. [Google Scholar]
- Richards, M.; Ghanem, M.; Osmond, M.; Guo, Y. Grid-based analysis of air pollution data. Ecol. Mod. 2006, 194, 274–286. [Google Scholar] [CrossRef]
- Reisinger, A.R.; Fraser, G.J.; Johnston, P.V.; McKenzie, R.L.; Matthews, W.A. Slow-Scanning DOAS System for Urban Air Pollution Monitoring. In Proceedings of the XVIII Quadrennial Ozone Symposium, L’Aquila, Italy, 12–21 September 1966; pp. 12–21. [Google Scholar]
- Tiwari, A.; Sadistap, S.; Mahajan, S.K. Development of Environment Monitoring System Using Internet of Things—Ambient Communications and Computer Systems. AISC 2018, 696, 403–412. [Google Scholar]
- Dhingra, S.; Madda, R.B.; Gandomi, A.H.; Patan, R.; Daneshmand, M. Internet of Things Mobile–Air Pollution Monitoring System (IoT-Mobair). Internet Things J. 2019, 6, 5577–5584. [Google Scholar] [CrossRef]
- Li, S.-T.; Chou, S.-W.; Pan, J.-J. Multi-Resolution Spatio-Temporal Data Mining for the Study of Air Pollutant Regionalization. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 7 January 2000; p. 7. [Google Scholar]
- Kumar, A.; Hancke, G.P. Energy efficient environment monitoring system based on the IEEE 802.15.4 standard for low cost requirements. IEEE Sens. J. 2014, 14, 2557–2566. [Google Scholar] [CrossRef]
- Ferdoush, S.; Li, X. Wireless sensor network system design using raspberry Pi and arduino for environmental monitoring applications. Procedia Comput. Sci. 2014, 34, 103–110. [Google Scholar] [CrossRef]
- Bacco, M.; Delmastro, F.; Ferro, E.; Gotta, A. Environmental Monitoring for Smart Cities. IEEE Sens. J. 2017, 17, 7767–7774. [Google Scholar] [CrossRef]
- Morawska, L.; Thai, P.K.; Liu, X.; Asumadu-Sakyi, A.; Ayoko, G.; Bartonova, A.; Bedini, A.; Chai, F.; Christensen, B.; Dunbabin, M.; et al. Applications of low-cost sensing technologies for air quality monitoring and exposure assessment: How far have they gone? Environ. Int. 2018, 116, 286–299. [Google Scholar] [CrossRef]
- Sharma, D.K.; Rajput, M.S.; Akbar, A.; Kumar, A. Development of Embedded System for Carbon Nano Tube (CNT) Based Ammonia (NH3) Gas Sensor. In Proceedings of the Annual IEEE India Conference (INDICON), New Delhi, India, 17–20 December 2015; pp. 1–4. [Google Scholar]
- Pandya, S.; Barot, V.; Kapadia, V. QoS Enabled IoT Based Low Cost Air Quality Monitoring System with Power Consumption Optimization. Cybern. Inf. Technol. 2020, 20, 2020. [Google Scholar]
- Pandya, S.; Sur, A.; Kotecha, K. Smart epidemic tunnel: IoT-based sensor-fusion assistive technology for COVID-19 disinfection. Int. J. Pervasive Comput. Commun. 2020. [Google Scholar] [CrossRef]
- Kularatna, N.; Sudantha, B.H. An Environmental Air Pollution Monitoring System Based on the IEEE 1451 Standard for Low-Cost Requirements. IEEE Sens. J. 2008, 8, 415–422. [Google Scholar] [CrossRef]
- CPCB. National Air Quality Monitoring Programme. 2019. Available online: https://cpcb.nic.in/about-namp/ (accessed on 12 December 2019).
- AQI India. Available online: https://www.aqi.in/dashboard (accessed on 12 November 2019).
- Qiu, J.; Wu, Q.; Ding, G.; Xu, Y.; Feng, S. A survey of machine learning for big data processing. EURASIP J. Adv. Signal Process. 2016, 2016, 67. [Google Scholar] [CrossRef]
- Kim, H.; Jung, H.Y. Ridge fuzzy regression modelling for solving multicollinearity. Mathematics 2020, 8, 1572. [Google Scholar] [CrossRef]
- Zhang, G.; Lu, H.; Dong, J.; Poslad, S.; Li, R.; Zhang, X.; Rui, X. A framework to predict high-resolution spatiotemporal PM2.5 distributions using a deep-learning model: A case study of Shijiazhuang, China. Remote Sens. 2020, 12, 2825. [Google Scholar] [CrossRef]
- Carlin, B.P.; Louis, T.A. Bayes and Empirical Bayes Methods for Data Analysis; Chapman and Hall/CRC: London, UK, 2010. [Google Scholar]
- Kyriakides, E.; Suryanarayanan, S.; Heydt, G.T. State estimation in power engineering using the Huber robust regression technique. IEEE Trans. Power Syst. 2005, 20, 1183–1184. [Google Scholar] [CrossRef]
- Yang, X.; Wen, W. Ridge and lasso regression models for cross-version Defect Prediction. IEEE Trans. Reliab. 2018, 67, 885–896. [Google Scholar] [CrossRef]
- Keerthi, S.S.; Shevade, S. A fast tracking algorithm for generalized LARS/LASSO. IEEE Trans. Neural Netw. 2007, 18, 1826–1830. [Google Scholar] [CrossRef]
- Shang, F.; Zhou, K.; Liu, H.; Cheng, J.; Tsang, I.W.; Zhang, L.; Tao, D.; Jiao, L. VR-SGD: A simple stochastic variance reduction method for machine learning. IEEE Trans. Knowl. Data Eng. 2020, 32, 188–202. [Google Scholar] [CrossRef]
- Zhang, S.; Xing, W. Object Tracking with Adaptive Elastic Net Regression. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 2597–2601. [Google Scholar]
- MQTT v5.0 Now an Official OASIS Standard. Available online: http://mqtt.org/ (accessed on 12 November 2019).
- Air Quality Index (AQI). Air Quality Communication Workshop San Salvador, El Salvado. Available online: https://www.epa.gov/sites/production/files/2014-05/documents/zell-aqi.pdf (accessed on 31 August 2020).
- AQI Basics. Available online: https://www.airnow.gov/aqi/aqi-basics/ (accessed on 7 September 2020).













| Name | CPU Configurations | Price (Rs.) | Analog I/O Pins | Digital I/O Pins |
|---|---|---|---|---|
| Raspberry Pi 3 | Quad Core1.2 GHz Broadcom BCM2837 64-bit Processor (1 GB, 42 g) | 3200 | 0 | 14 |
| Node MCU | Tensilica XtensaLX106 32-bit controller Wi-Fi SOC integrated (4 MB, 8 g) | 400 | 1 | 17 |
| BeagleBone Black | AM335x,1GHz ARM Cortex A8 Processor (512 MB, 40 g) | 6000 | 6 | 14 |
| Udoo (Quad) | Freescale MX6 Quad, 4 x Cortex™ A9 Core@ 1GHz processor With Atmel 32-bit cortex controller (1 GB, 150 g) | 9000 | 14 | 62 + 14 |
| Intel Galileo | Quark ™ X1000 32-bit 400 MHz (256 B, 370 g) | 7000 | 6 | 14 |
| Features | Technical Specifications |
|---|---|
| Pollutants Measuring Capability | PM2.5 and PM10 levels |
| Sensitivity | 0.001 mg/m3 |
| Measurement range | 0–100 mg/m3 |
| Response time | N.A. |
| Zero drift | Auto (zero every hour) |
| Power backup | 5 V |
| Related current | 60 mA |
| Sleep Current | <4 mA |
| Temperature Range | −20 to +60 degrees |
| Threshold (minimum resolution of particles) | 0.3 μm |
| Air Pressure | 86 KPa to 110 KPa |
| Protocol | UART |
| Features | Technical Specifications |
|---|---|
| Pollutants Measuring Capability | CO levels |
| Sensitivity | −400 to −650 nA/ppm at 2 ppm |
| Measurement range | 0–1000 ppm |
| Response time | <15 s |
| Zero drift | <0.1 ppm/year |
| Power backup | 5 V |
| Related current | 60 mA |
| Sleep Current | <4 mA |
| Temperature Range | −20 to +50 degrees |
| Relative humidity | <95% |
| Heating Consumption | 350 mW |
| Protocol | UART |
| Features | Technical Specifications |
|---|---|
| Pollutants Measuring Capability | NO2 levels |
| Sensitivity | −250 to −600 nA/ppm at 2 ppm |
| Response time | <25 s |
| Power backup | 5 V |
| Measurement Range | 0.001 to 0.02 ppm |
| Zero drift | 0 to 0.02 ppm/year |
| Weight | <13 g |
| Temperature Range | 3 to 20 degrees |
| Storage Period | 6 months |
| Load resistor | 33 to 100 Ω |
| Noise | ±2 standard deviations (ppm equivalent) |
| Features | Technical Specifications |
|---|---|
| Pollutants Measuring Capability | Ozone levels |
| Sensitivity | 0.002 ppm |
| Power backup | 3.3 V |
| Response Time | 20 s |
| Measurement range | 0.002 to 0.01 ppm |
| Temperature Range | −20 to +60 degrees |
| Zero drift | <0.02 ppm/day |
| AQI Values | Classification of Risk |
|---|---|
| 0–50 | Good |
| 51–100 | Moderate |
| 101–150 | Unhealthy for sensitive groups |
| 151–200 | Unhealthy |
| 201–300 | Very unhealthy |
| 300 and above | Hazardous |
| Data Type | Number of Rows | Number of Columns | Status |
|---|---|---|---|
| Raw data | 189,648 | 18 | Raw data |
| Processed data | 600,00 | 13 | Feature selection (dimensionality reduction) |
| Missing data (1 value/row) | 129,648 | 13 | Removing Missing values |
| Training data | 400,00 | 13 | Data extraction for Training the model |
| Testing data | 200,00 | 13 | Data extraction for Testing the model |
| Pollutants | Weight Parameter(W) | Prediction Accuracy (%) |
|---|---|---|
| PM2.5 | 734.33 | 99.01 |
| PM10 | 11.08 | 98.12 |
| CO | 943.78 | 97.79 |
| NO2 | 1176.20 | 91 |
| O3 (1 h) | 4.00 | 96.21 |
| O3 (4 h) | 2.00 | 96.59 |
| Pollutants | Prediction Accuracy (%) |
|---|---|
| PM2.5 | 90 |
| PM10 | 84 |
| CO | 83 |
| NO2 | 84.79 |
| O3 (1 h) | 79 |
| O3 (4 h) | 77 |
| Methodologies | PM2.5 (%) | PM10 (%) | CO (%) | NO2 (%) | O3 (1 h (%)) | O3 (1 h (%)) |
|---|---|---|---|---|---|---|
| Linear Regression | 99.01 | 98.12 | 97.79 | 91 | 96.21 | 96.59 |
| Ridge Regression | 98.11 | 97.68 | 97.45 | 89 | 94.34 | 93.21 |
| Lasso Regression | 97.23 | 97.11 | 97.33 | 87.78 | 93.98 | 93.12 |
| Bayes Regression | 97.32 | 96.59 | 97.08 | 86.78 | 92.79 | 93.02 |
| Huber Regression | 96.88 | 96.45 | 96.67 | 85.04 | 90.12 | 91.11 |
| Lars Regression | 96.67 | 96.55 | 96.01 | 84.49 | 89.98 | 90.34 |
| Lasso-Lars Regression | 95.56 | 95.54 | 94.99 | 80.76 | 88.77 | 90.11 |
| SGD Regression | 94.86 | 94.33 | 93.79 | 80.03 | 87.79 | 90.01 |
| ElasticNet | 94.78 | 94.13 | 93.54 | 79.76 | 87.16 | 89.78 |
| ANN Regression | 90 | 84 | 83 | 84.79 | 79 | 77 |
| Methodologies | Mean Absolute Error (%) | Mean Squared Error (%) |
|---|---|---|
| Linear Regression | 1.12 | 3.22 |
| Ridge Regression | 1.23 | 3.23 |
| Lasso Regression | 1.40 | 4.20 |
| Bayes Regression | 1.77 | 4.23 |
| Huber Regression | 2.67 | 4.67 |
| Lars Regression | 3.33 | 5.23 |
| Lasso-Lars Regression | 4.06 | 6.63 |
| SGD Regression | 5.12 | 9.23 |
| ElasticNet | 6.02 | 10.20 |
| ANN Regression | 11.23 | 21.63 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pandya, S.; Ghayvat, H.; Sur, A.; Awais, M.; Kotecha, K.; Saxena, S.; Jassal, N.; Pingale, G. Pollution Weather Prediction System: Smart Outdoor Pollution Monitoring and Prediction for Healthy Breathing and Living. Sensors 2020, 20, 5448. https://doi.org/10.3390/s20185448
Pandya S, Ghayvat H, Sur A, Awais M, Kotecha K, Saxena S, Jassal N, Pingale G. Pollution Weather Prediction System: Smart Outdoor Pollution Monitoring and Prediction for Healthy Breathing and Living. Sensors. 2020; 20(18):5448. https://doi.org/10.3390/s20185448
Chicago/Turabian StylePandya, Sharnil, Hemant Ghayvat, Anirban Sur, Muhammad Awais, Ketan Kotecha, Santosh Saxena, Nandita Jassal, and Gayatri Pingale. 2020. "Pollution Weather Prediction System: Smart Outdoor Pollution Monitoring and Prediction for Healthy Breathing and Living" Sensors 20, no. 18: 5448. https://doi.org/10.3390/s20185448
APA StylePandya, S., Ghayvat, H., Sur, A., Awais, M., Kotecha, K., Saxena, S., Jassal, N., & Pingale, G. (2020). Pollution Weather Prediction System: Smart Outdoor Pollution Monitoring and Prediction for Healthy Breathing and Living. Sensors, 20(18), 5448. https://doi.org/10.3390/s20185448