A Modified Kalman Filter for Integrating the Different Rate Data of Gyros and Accelerometers Retrieved from Android Smartphones in the GNSS/IMU Coupled Navigation



Abstract
1. Introduction
2. The Kalman Filter for the GNSS/IMU Coupled Navigation
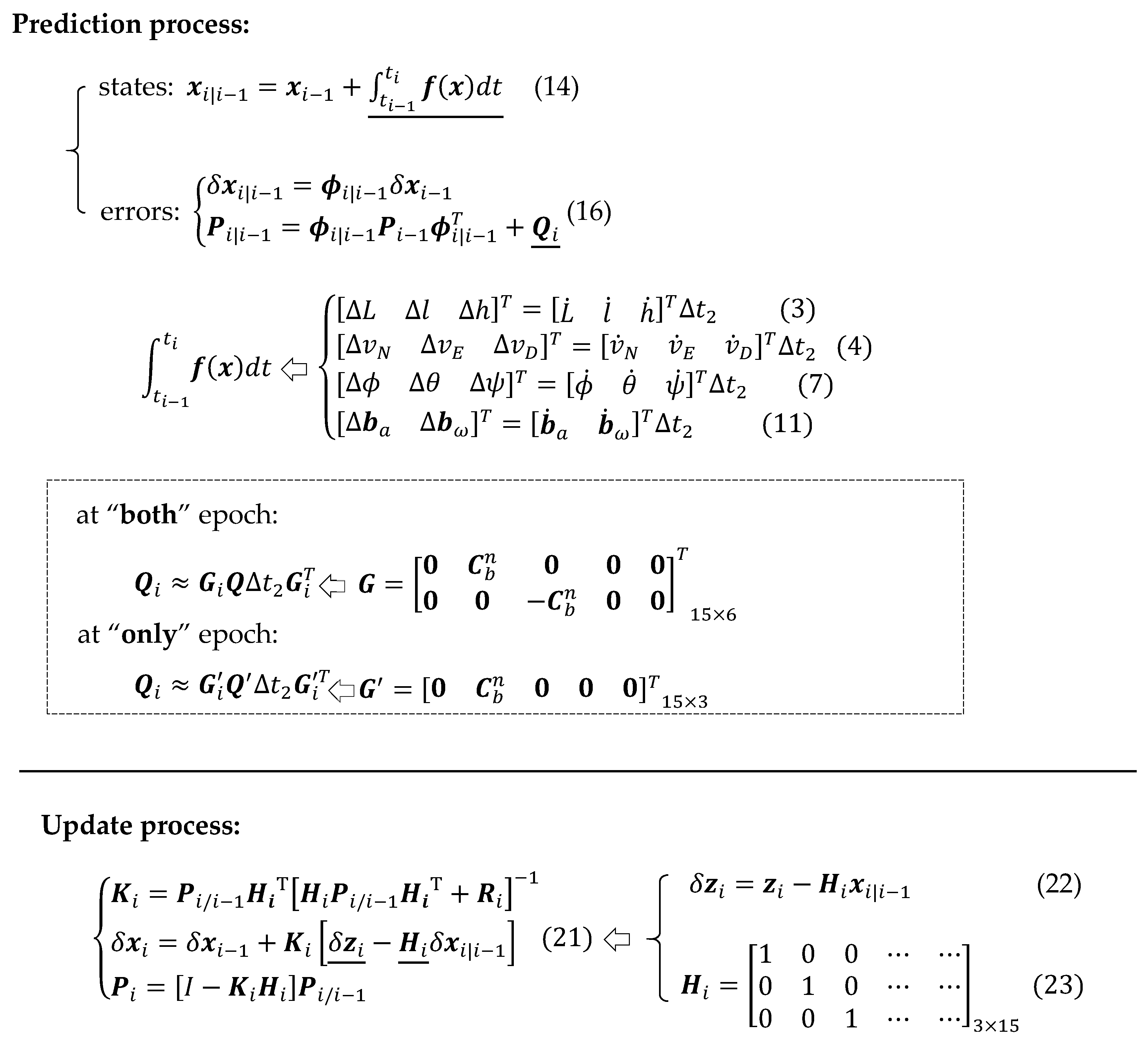
2.1. The Prediction Process of the Kalman Filter
2.2. The Update Process of the Kalman Filter
2.3. Advanced Developments of the Kalman Filter in the GNSS/IMU Coupled Navigation
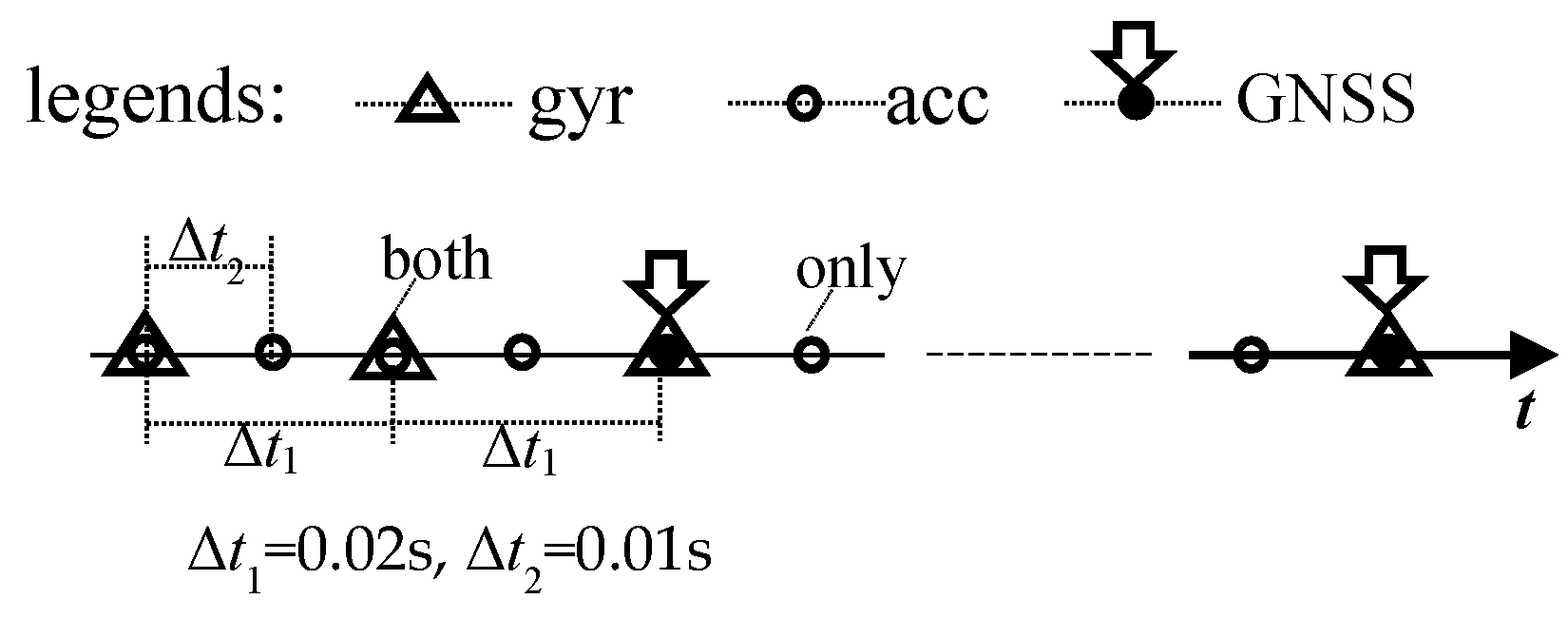
3. The Modified Kalman Filter for Integrating the Different Rate Data of Gyros and Accelerometers
4. Test and Results
4.1. The Reference Solutions of the GNSS/KVH Coupled Navigations
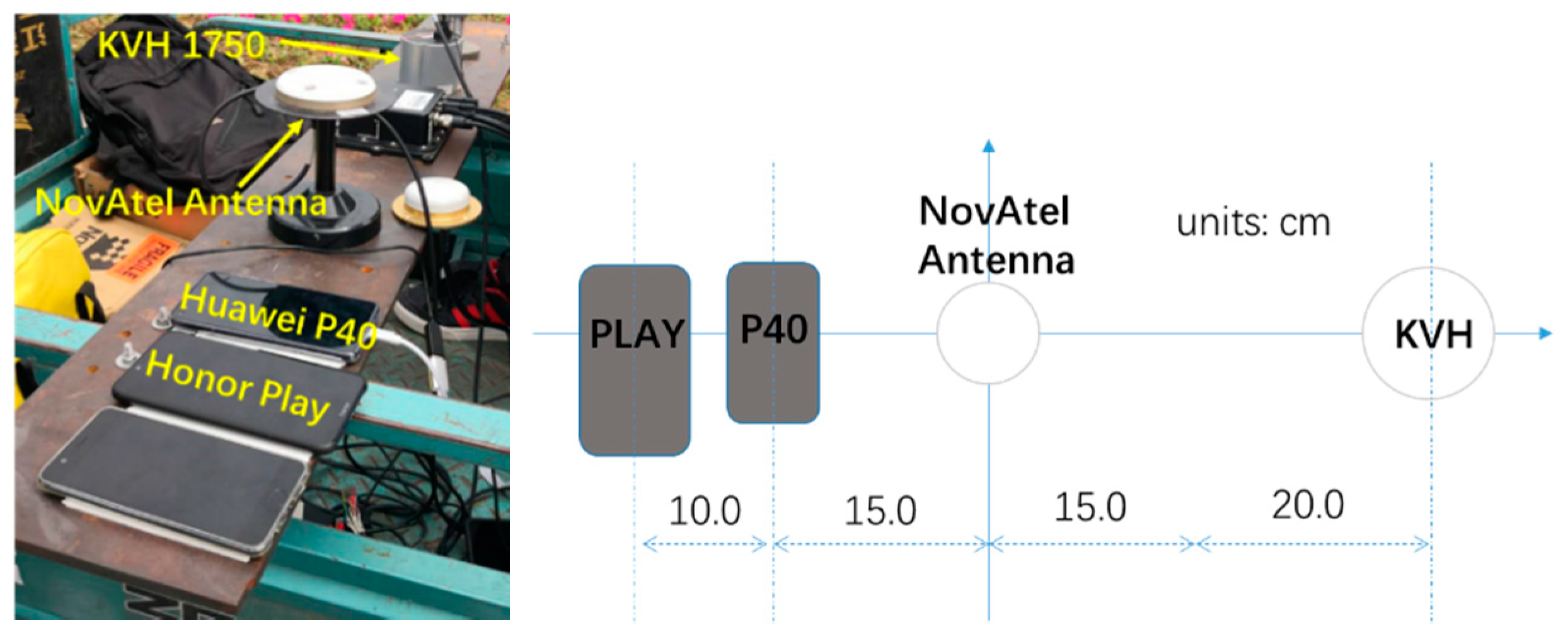
4.2. The GNSS/IMU-Smartphone Coupled Navigation
- “SENSOR_DELAY_FASTEST” -> obtain sensor data as fast as possible;
- “SENSOR_DELAY_GAME”-> rate suitable for games;
- “SENSOR_DELAY_UI”-> rate suitable for the user interface;
- “SENSOR_DELAY_NORMAL”-> rate suitable for screen orientation changes.
- “Honor Play” 100 Hz gyros and 100 Hz accelerometers in GNSS open-sky condition.
- “Huawei P40” 50 Hz gyros and 50 Hz accelerometers in GNSS open-sky condition.
- “Huawei P40” 50 Hz gyros and 100 Hz accelerometers in GNSS open-sky condition.
- “Huawei P40” 50 Hz gyros and 50 Hz accelerometers in a 50 s GNSS denying condition (straight line).
- “Huawei P40” 50 Hz gyros and 100 Hz accelerometers in a 50 s GNSS denying condition (straight line).
- “Huawei P40” 50 Hz gyros and 50 Hz accelerometers in a 30 s GNSS denying condition (turning).
- “Huawei P40” 50 Hz gyros and 100 Hz accelerometers in a 30 s GNSS denying condition (turning).
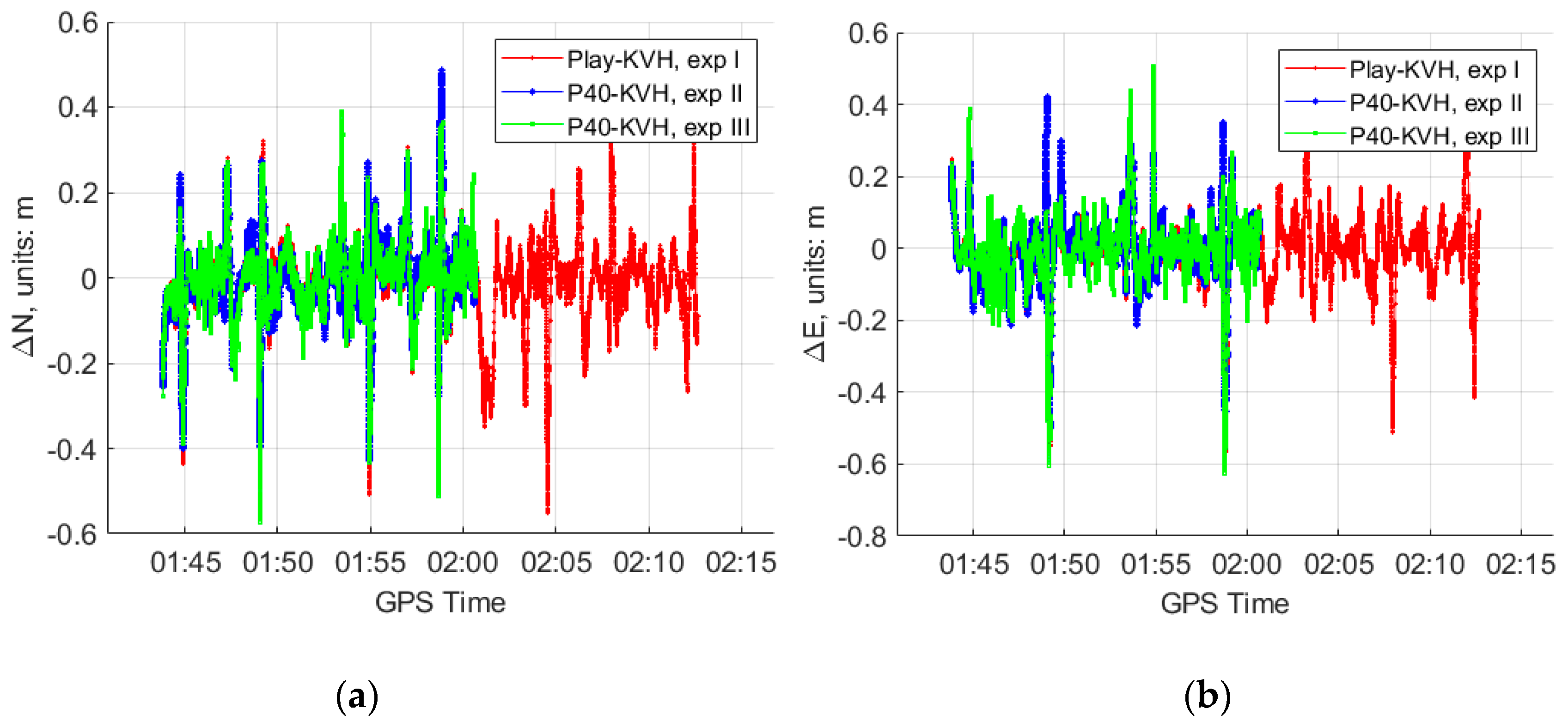
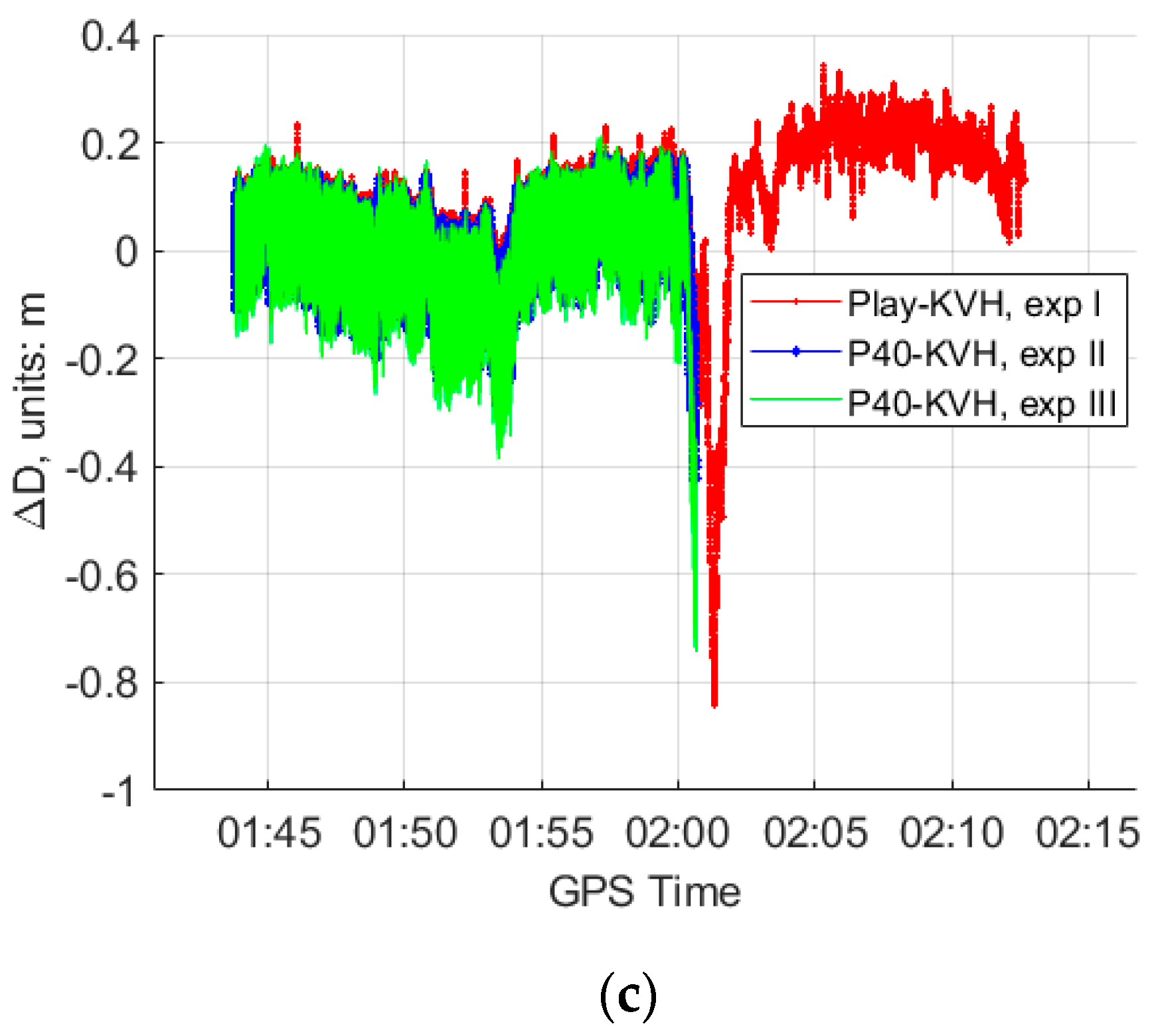
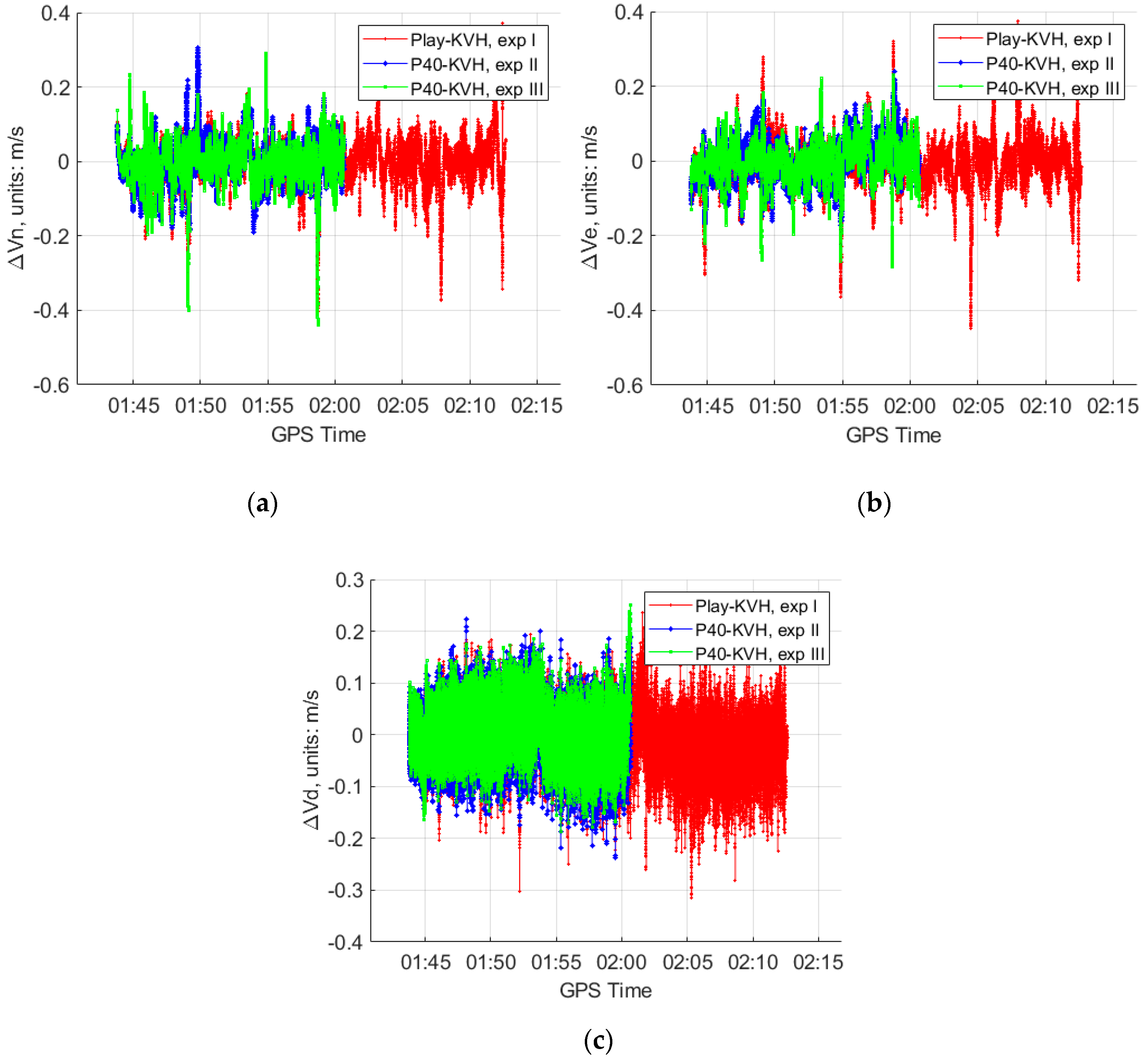
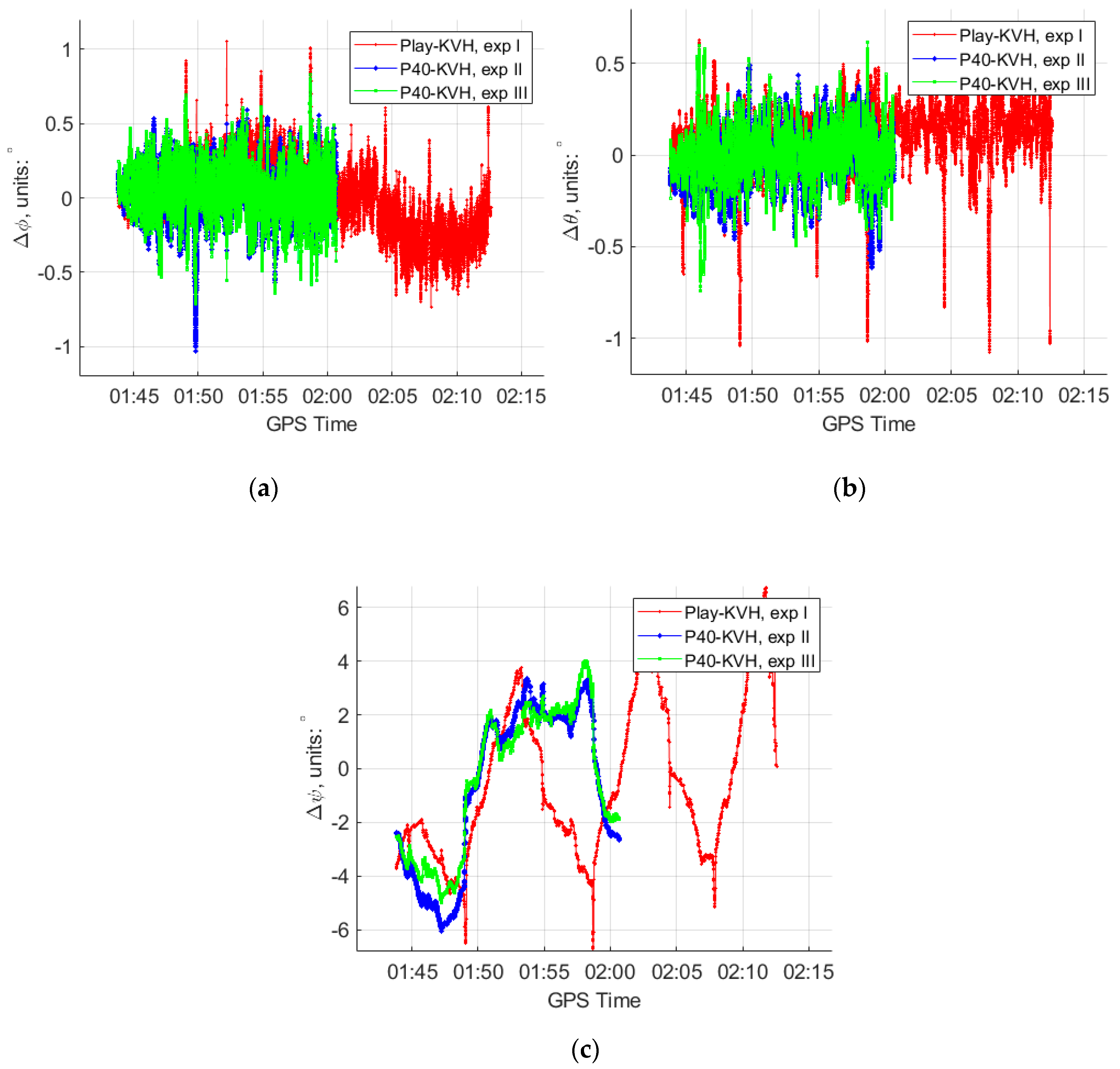
4.2.1. The Navigation Performance under the Open-Sky Conditions
- The GNSS/IMU-smartphones coupled navigation can obtain reasonable solutions, for instance, the position differences with respect to the reference are around 0.1 m, the velocity differences are around 0.05 m/s, the roll and pith differences are around 0.2°, and the yaw differences are around 3°.
- After introducing the high rate data of the accelerometers to the modified Kalman filter, the GNSS/IMU-P40 coupled navigation does not show the obvious improvements at the position and velocity solutions. However, slight improvements can be witnessed at the attitude solutions in the experiment III, as shown in Table 2.
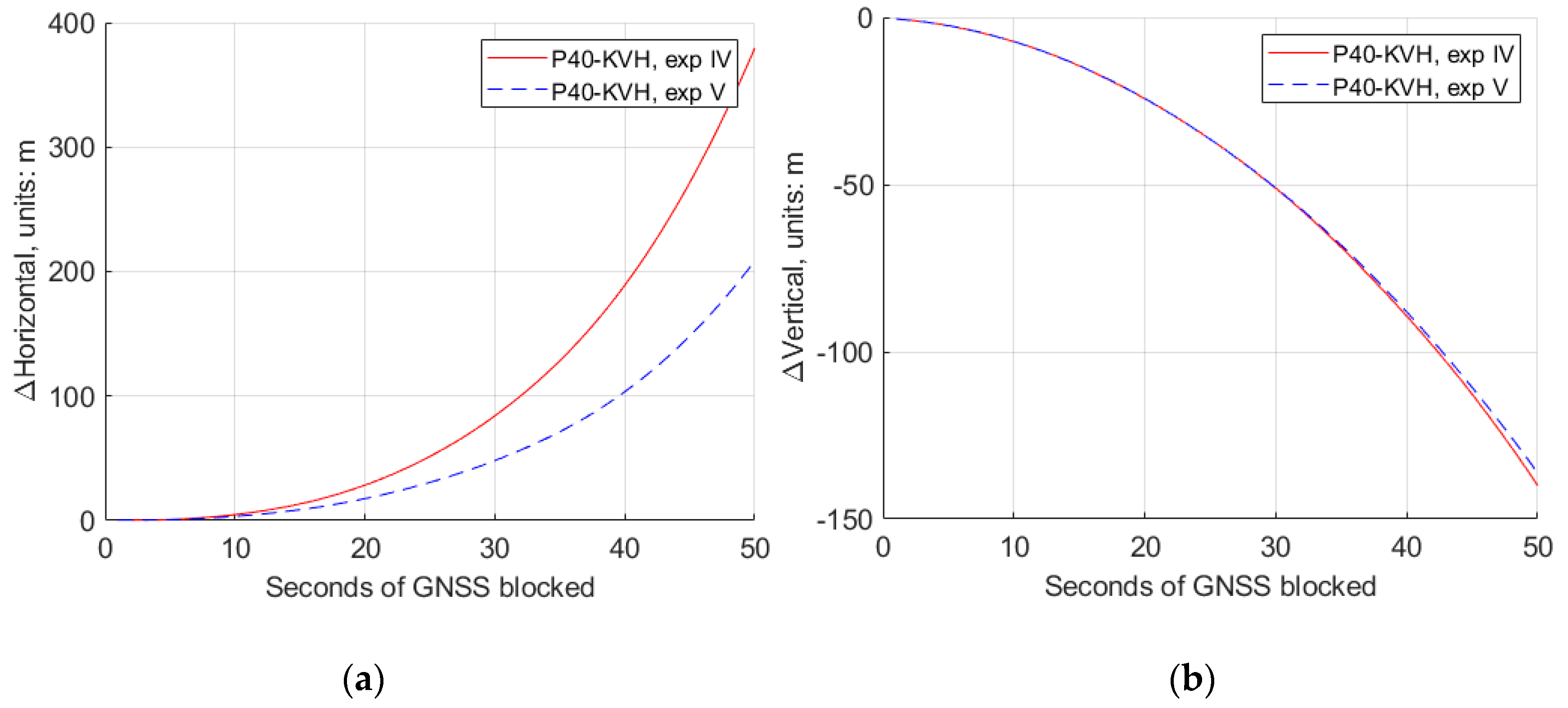
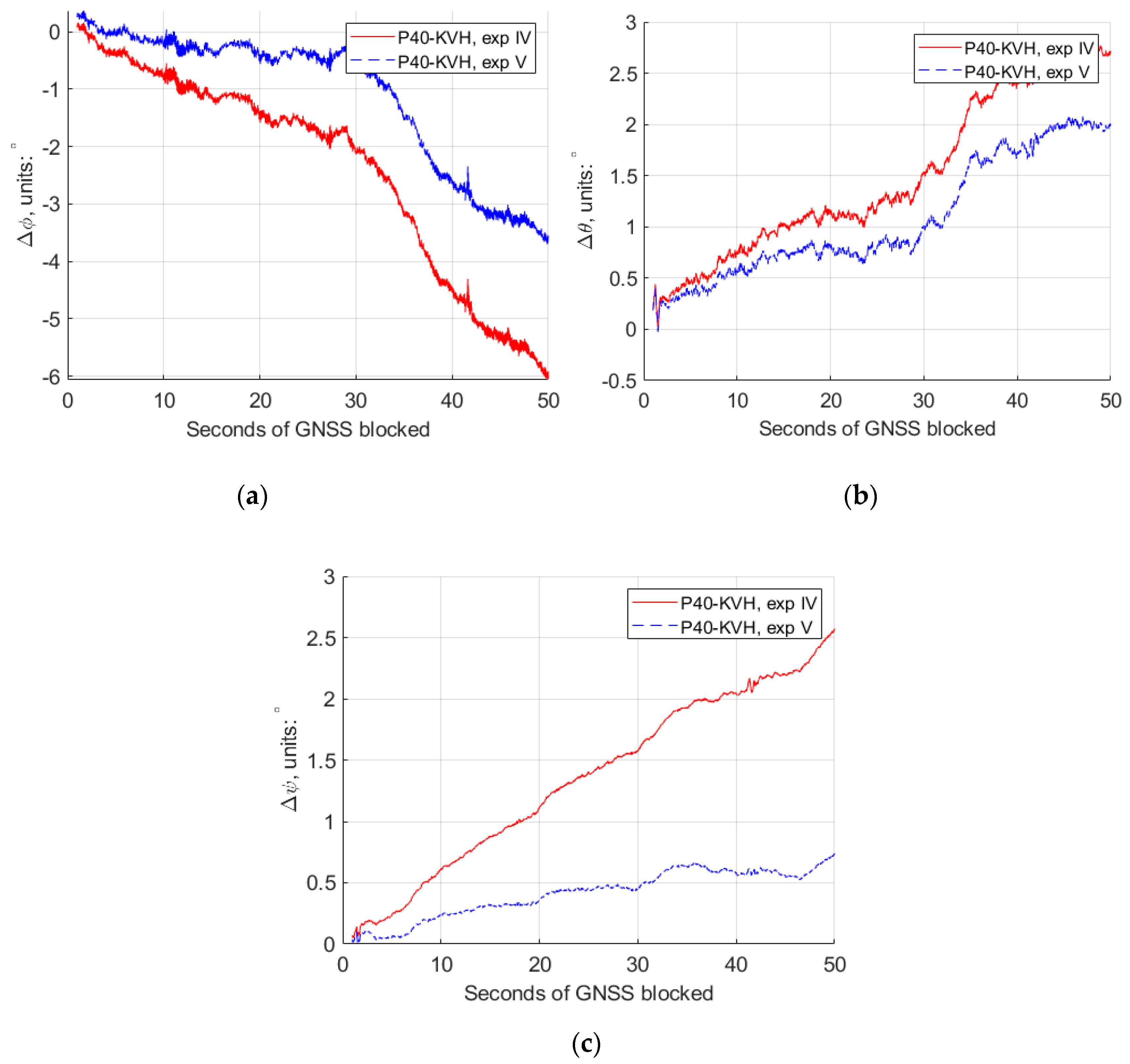
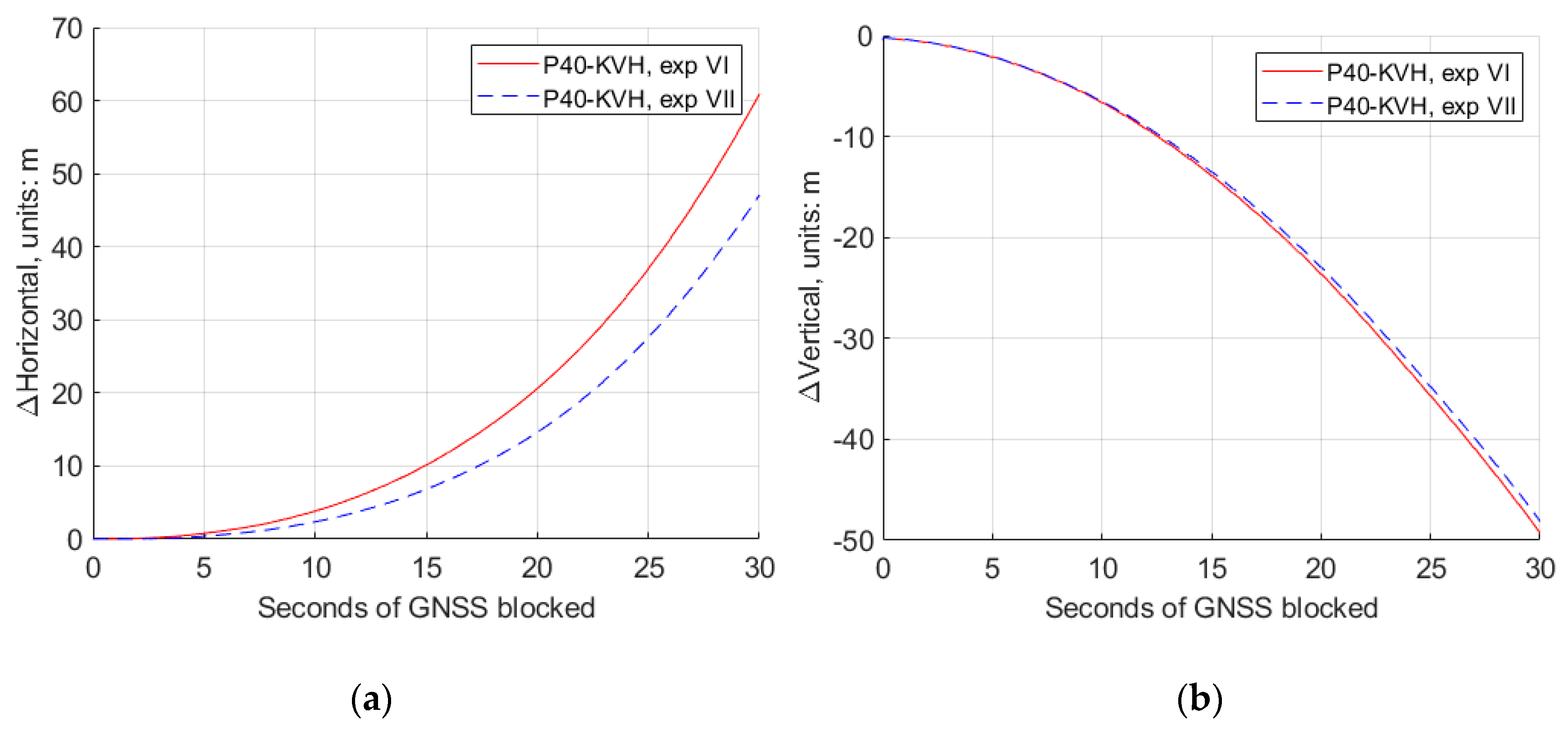
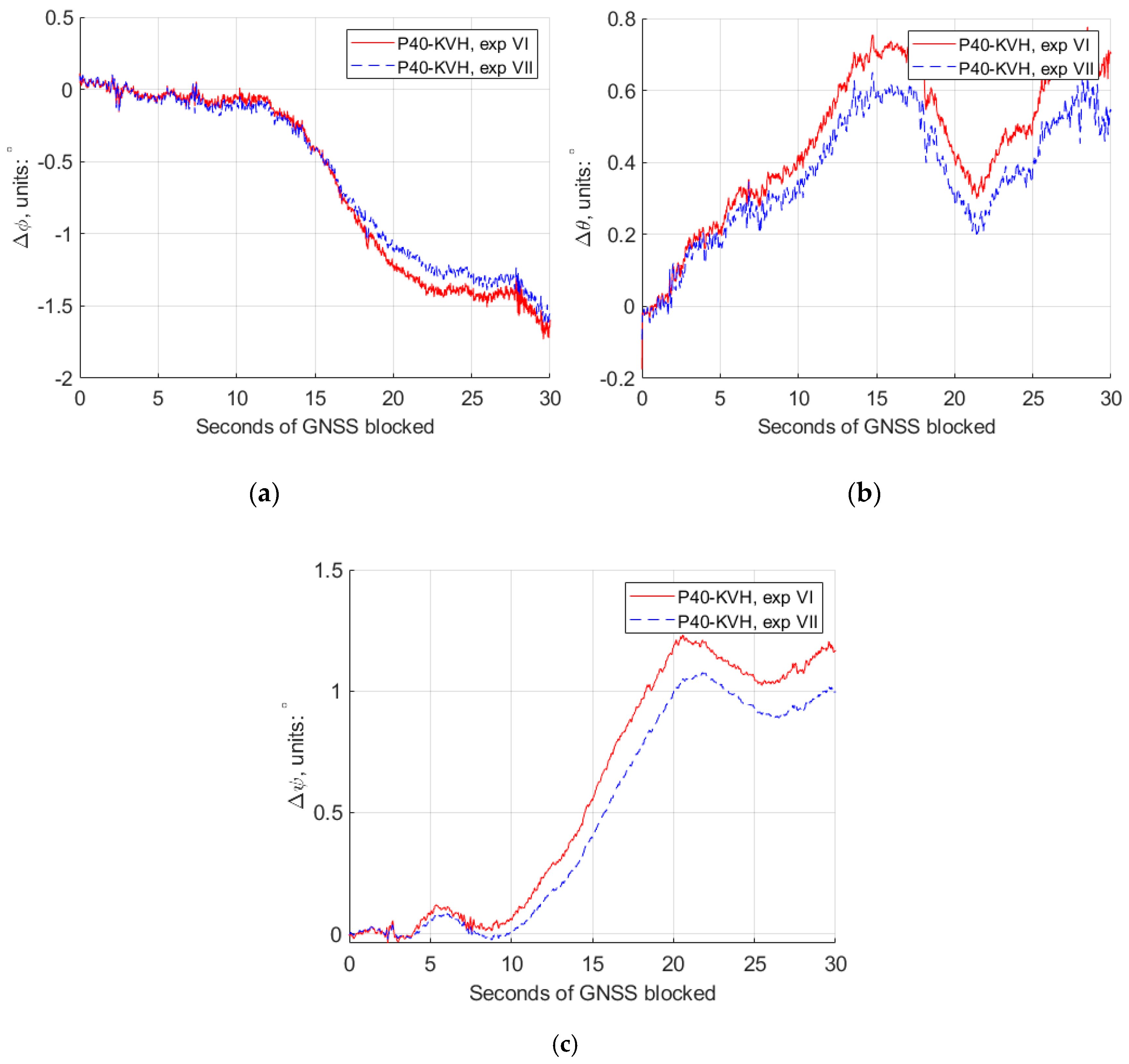
4.2.2. The Navigation Performance in the Simulated GNSS-Denied Environment
5. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Castropalacio, J.C.; Velazquez, L.; Gomeztejedor, J.A.; Manjon, F.J.; Monsoriu, J.A. Using a smartphone acceleration sensor to study uniform and uniformly accelerated circular motions. Rev. Bras. De Ensino De Fis. 2014, 36, 1–5. [Google Scholar]
- Mourcou, Q.; Fleury, A.; Franco, C.; Klopcic, F.; Vuillerme, N. Performance evaluation of smartphone inertial sensors measurement for range of motion. Sensors 2015, 15, 23168–23187. [Google Scholar] [CrossRef] [PubMed]
- Masiero, A.; Vettore, A. Improved feature matching for mobile devices with IMU. Sensors 2016, 16, 1243. [Google Scholar] [CrossRef] [PubMed]
- Hakim, A.; Huq, M.S.; Shanta, S.; Ibrahim, B.S.K.K. Smartphone based data mining for fall detection: Analysis and Design. Proced. Comput. Sci. 2017, 105, 46–51. [Google Scholar] [CrossRef]
- Andriamandroso, A.; Lebeau, F.; Beckers, Y.; Froidmont, E.; Dufrasne, I.; Heinesch, B.; Dumortier, P.; Blanchy, G.; Blaise, Y.; Bindelle, J. Development of an open-source algorithm based on inertial measurement units (IMU) of a smartphone to detect cattle grass intake and ruminating behaviors. Comput. Electron. Agric. 2017, 139, 126–137. [Google Scholar] [CrossRef]
- Sun, R.; Cheng, Q.; Xie, F.; Zhang, W.; Ochieng, W.Y. Combining machine learning and dynamic time wrapping for vehicle driving event detection using smartphones. IEEE Trans. Intelligent Transp. Syst. 2019. Available online: https://ieeexplore.ieee.org/abstract/document/8924950 (accessed on 31 July 2020). [CrossRef]
- Mostafa, M.Z.; Khater, H.A.; Rizk, M.R.; Bahasan, A.M. A novel GPS/ RAVO /MEMS-INS smartphone sensors integrated method to enhance USV navigation system during GPS outages. Meas. Sci. Technol. 2019, 30, 1–14. [Google Scholar] [CrossRef]
- Yan, W.; Bastos, L.; Magalhães, A. Performance assessment of the android smartphone’s IMU in a GNSS/INS coupled navigation model. IEEE Access 2019, 7, 171073–171083. [Google Scholar] [CrossRef]
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Techonology, 2nd ed.; The Institution of Electrical Engineers: Stevenage, UK, 2004; pp. 24–53. [Google Scholar]
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering; John Willey & Sons: New York, NY, USA, 1997; pp. 289–306. [Google Scholar]
- Shin, E.H. Accuracy Improvement of Low Cost INS/GPS for Land Application. Master’s Thesis, The University of Calgary, Calgary, AL, Canada, 2001. [Google Scholar]
- Deurloo, R.A. Development of a Kalman Filter Integrating System and Measurement Models for a Low-cost Strapdown Airborne Gravimetry System. Ph.D. Thesis, University of Porto, Porto, Spain, 2011. [Google Scholar]
- 1750 IMU Fiber Optic Gyro Inertial Measurement Unit. Available online: https://www.kvh.com/admin/products/gyros-imus-inss/imus/1750-imu/commercial-1750-imu (accessed on 31 July 2020).
- ICM20602 High Performance 6-Axis MEMS MotionTracking Device. Available online: https://invensense.tdk.com/wp-content/uploads/2016/10/DS-000178-ICM-20690-v1.0.pdf (accessed on 31 July 2020).
- BMI160 Small, Low Power Inertial Measurement Unit. Available online: https://www.boschsensortec.com/media/boschse-nsortec/downloads/datasheets/bst-bmi160-ds000.pdf (accessed on 31 July 2020).
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Paziewski, J. Recent advances and perspectives for positioning and applications with smartphone GNSS observations. Meas. Ence Technol. 2020, in press. [Google Scholar] [CrossRef]
- Yan, W.; Bastos, L.; Magalhães, A.; Zhang, Y.; Wang, A. Assessing Android Smartphone Based GNSS Positioning Accuracy, Proceedings of the China Satellite Navigation Conference (CSNC) 2020 Proceeding, Chengdu, China, 2020; Springer: Singapore, 2020; pp. 144–153. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMUs | Accelerometers | Gyros | ||||
|---|---|---|---|---|---|---|
| Bias Stability mg | Noise Density μg/sqrt (Hz) | Range g | Bias Stability °/s | Noise Density °/sqrt (hr) | Range °/sec | |
| KVH 1750 | 0.05 | 12 | ±10 | 1.38 × 10−5 | 0.012 | ±490 |
| ICM-20690 (P40) | 40 | 100 | ±4 | 1 | 0.24 | ±250 |
| Bosch-bmi160 (Play) | 150 | 180 | ±4 | 3 | 0.42 | ±250 |
| Phone-KVH | ΔN m | ΔE m | ΔD m | ΔVn m/s | ΔVe m/s | ΔVd m/s | Δφ ° | Δθ ° | Δψ ° |
|---|---|---|---|---|---|---|---|---|---|
| exp I (Play) | 0.0921 | 0.0894 | 0.1209 | 0.0526 | 0.0559 | 0.0518 | 0.2222 | 0.1767 | 2.8137 |
| exp II (P40) | 0.0895 | 0.0941 | 0.1113 | 0.0605 | 0.0529 | 0.0567 | 0.1770 | 0.1700 | 3.4536 |
| exp III (P40) | 0.0906 | 0.0945 | 0.1104 | 0.0586 | 0.0523 | 0.0508 | 0.1658 | 0.1388 | 2.6432 |
| P40-KVH | ΔHorizontal/m | ΔVertical/m | Δφ/° | Δθ/° | Δψ/° | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| exp IV | exp V | exp IV | exp V | exp IV | exp V | exp IV | exp V | exp IV | exp V | |
| 5 s | 0.737 | 0.799 | 2.550 | 2.533 | 0.368 | 0.007 | 0.458 | 0.342 | 0.237 | 0.054 |
| 10 s | 4.765 | 3.389 | 7.297 | 7.319 | 0.767 | 0.172 | 0.745 | 0.579 | 0.601 | 0.240 |
| 20 s | 28.44 | 17.64 | 24.38 | 24.34 | 1.370 | 0.381 | 1.153 | 0.812 | 1.106 | 0.370 |
| 30 s | 84.26 | 47.99 | 51.19 | 51.08 | 2.089 | 0.595 | 1.529 | 1.009 | 1.573 | 0.453 |
| 40 s | 189.6 | 102.8 | 89.41 | 88.16 | 4.536 | 2.628 | 2.400 | 1.726 | 2.050 | 0.587 |
| 50 s | 379.0 | 206.8 | 140.0 | 136.3 | 6.047 | 3.610 | 2.706 | 1.986 | 2.562 | 0.733 |
| P40−KVH | ΔHorizontal/m | ΔVertical/m | Δφ/° | Δθ/° | Δψ/° | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| exp VI | exp VII | exp VI | exp VII | exp VI | exp VII | exp VI | exp VII | exp VI | exp VII | |
| 5 s | 0.788 | 0.395 | −2.171 | −2.144 | −0.062 | −0.072 | 0.206 | 0.174 | 0.086 | 0.049 |
| 10 s | 3.796 | 2.391 | −6.668 | −6.567 | −0.043 | −0.076 | 0.403 | 0.337 | 0.061 | 0.001 |
| 20 s | 20.56 | 14.58 | 23.65 | −22.99 | −1.223 | −1.113 | 0.405 | 0.297 | 1.177 | 0.999 |
| 30 s | 60.89 | 46.73 | −49.29 | −48.05 | −1.550 | −1.649 | 0.701 | 0.538 | 1.164 | 0.994 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, W.; Zhang, Q.; Wang, L.; Mao, Y.; Wang, A.; Zhao, C. A Modified Kalman Filter for Integrating the Different Rate Data of Gyros and Accelerometers Retrieved from Android Smartphones in the GNSS/IMU Coupled Navigation. Sensors 2020, 20, 5208. https://doi.org/10.3390/s20185208
Yan W, Zhang Q, Wang L, Mao Y, Wang A, Zhao C. A Modified Kalman Filter for Integrating the Different Rate Data of Gyros and Accelerometers Retrieved from Android Smartphones in the GNSS/IMU Coupled Navigation. Sensors. 2020; 20(18):5208. https://doi.org/10.3390/s20185208
Chicago/Turabian StyleYan, Wenlin, Qiuzhao Zhang, Lijuan Wang, Ying Mao, Aisheng Wang, and Changsheng Zhao. 2020. "A Modified Kalman Filter for Integrating the Different Rate Data of Gyros and Accelerometers Retrieved from Android Smartphones in the GNSS/IMU Coupled Navigation" Sensors 20, no. 18: 5208. https://doi.org/10.3390/s20185208
APA StyleYan, W., Zhang, Q., Wang, L., Mao, Y., Wang, A., & Zhao, C. (2020). A Modified Kalman Filter for Integrating the Different Rate Data of Gyros and Accelerometers Retrieved from Android Smartphones in the GNSS/IMU Coupled Navigation. Sensors, 20(18), 5208. https://doi.org/10.3390/s20185208