A Low-Cost Visible Light Positioning System for Indoor Positioning


 ,
,  , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. System Design and Protocol
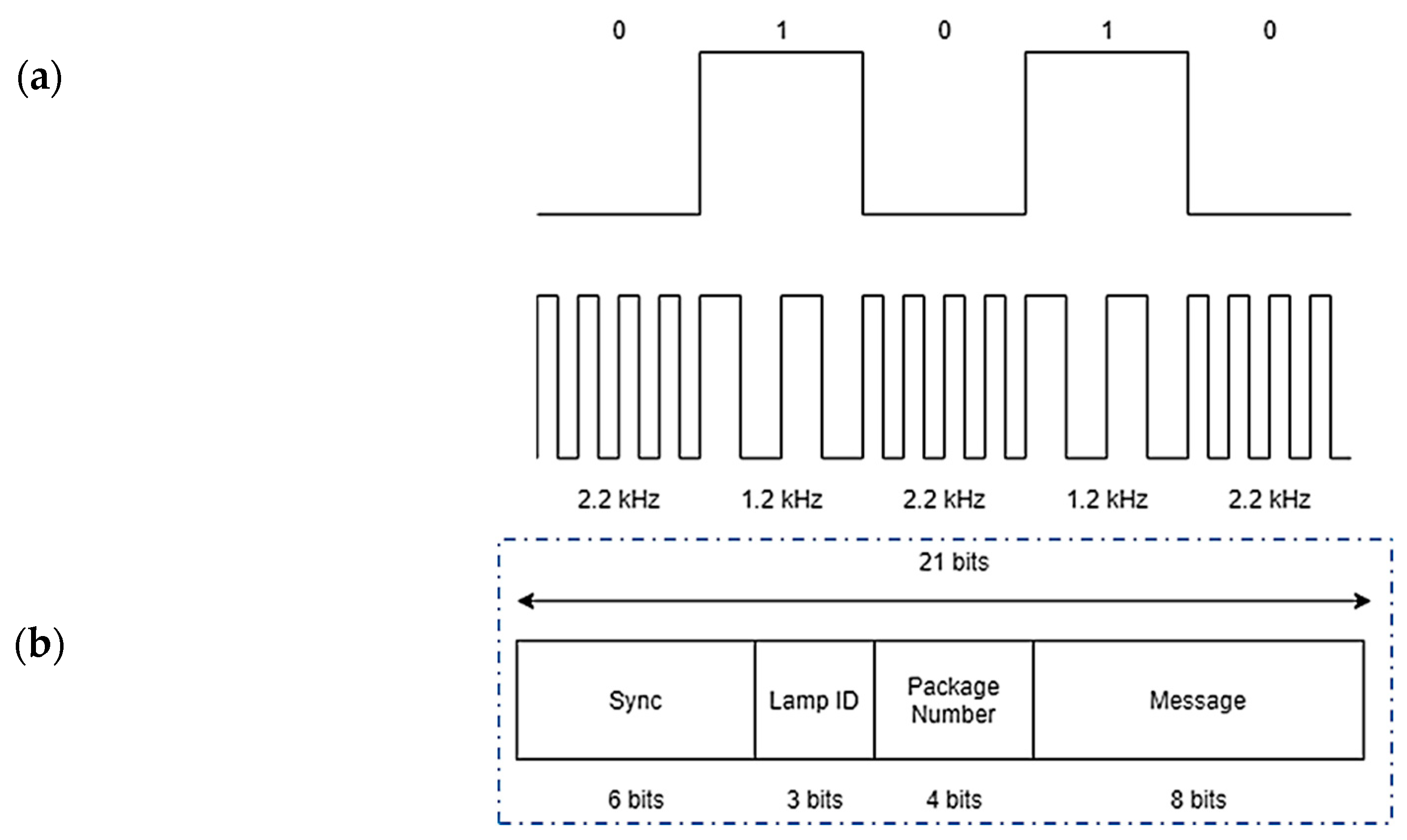
2.1.1. Transmission Protocol
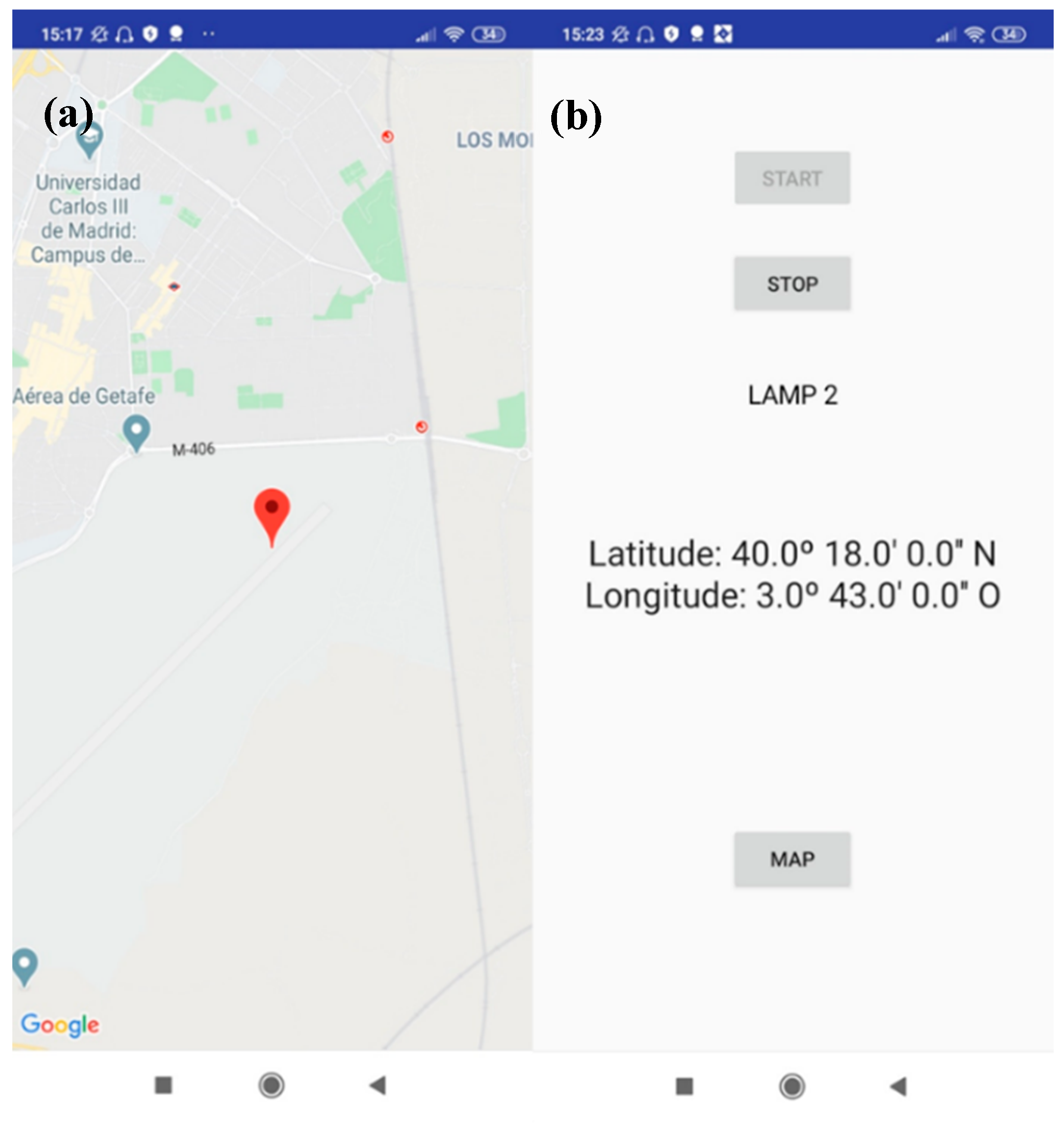
Longitude: 03° 43′ 00′’ W
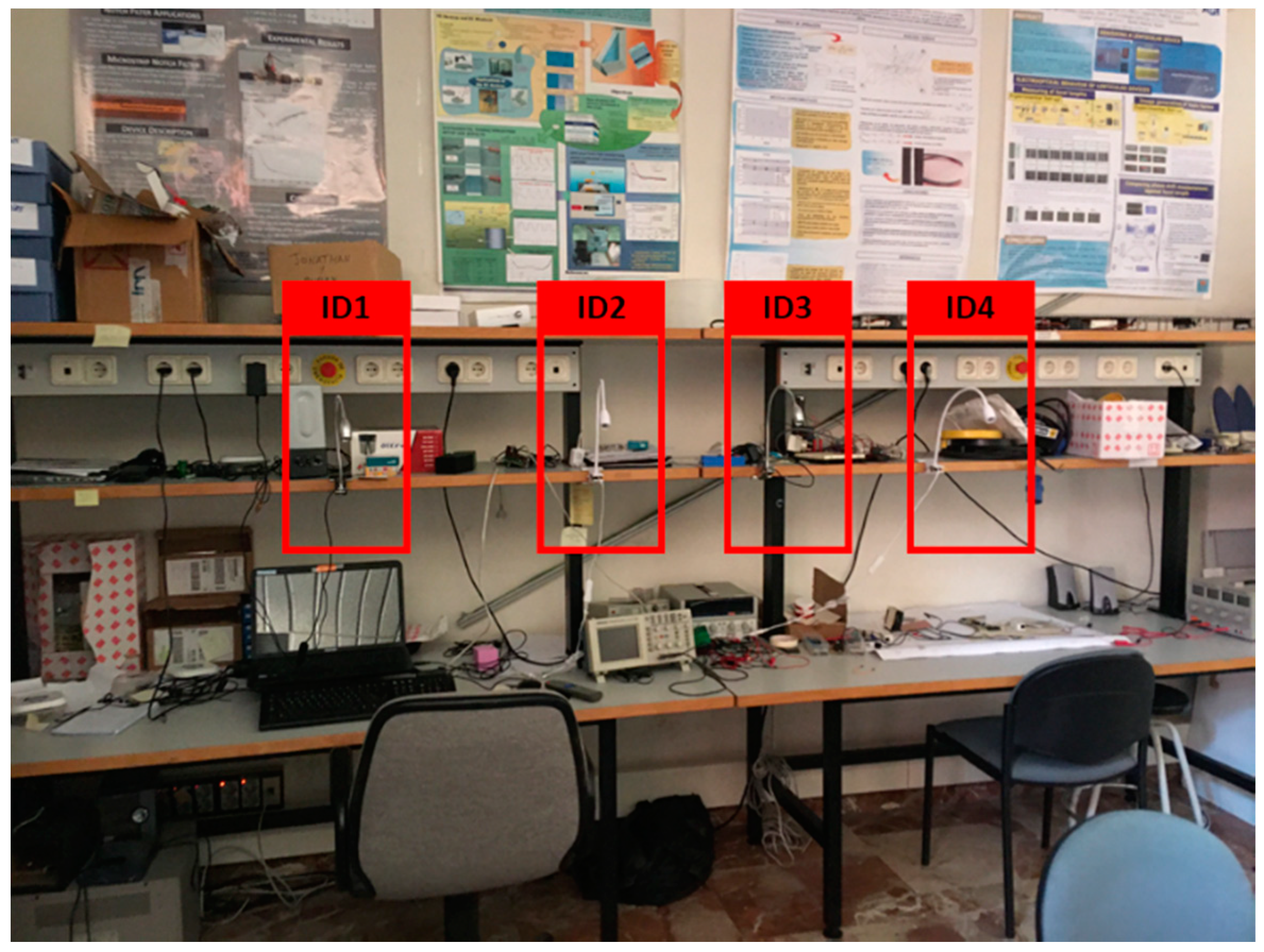
2.1.2. LED Beacon
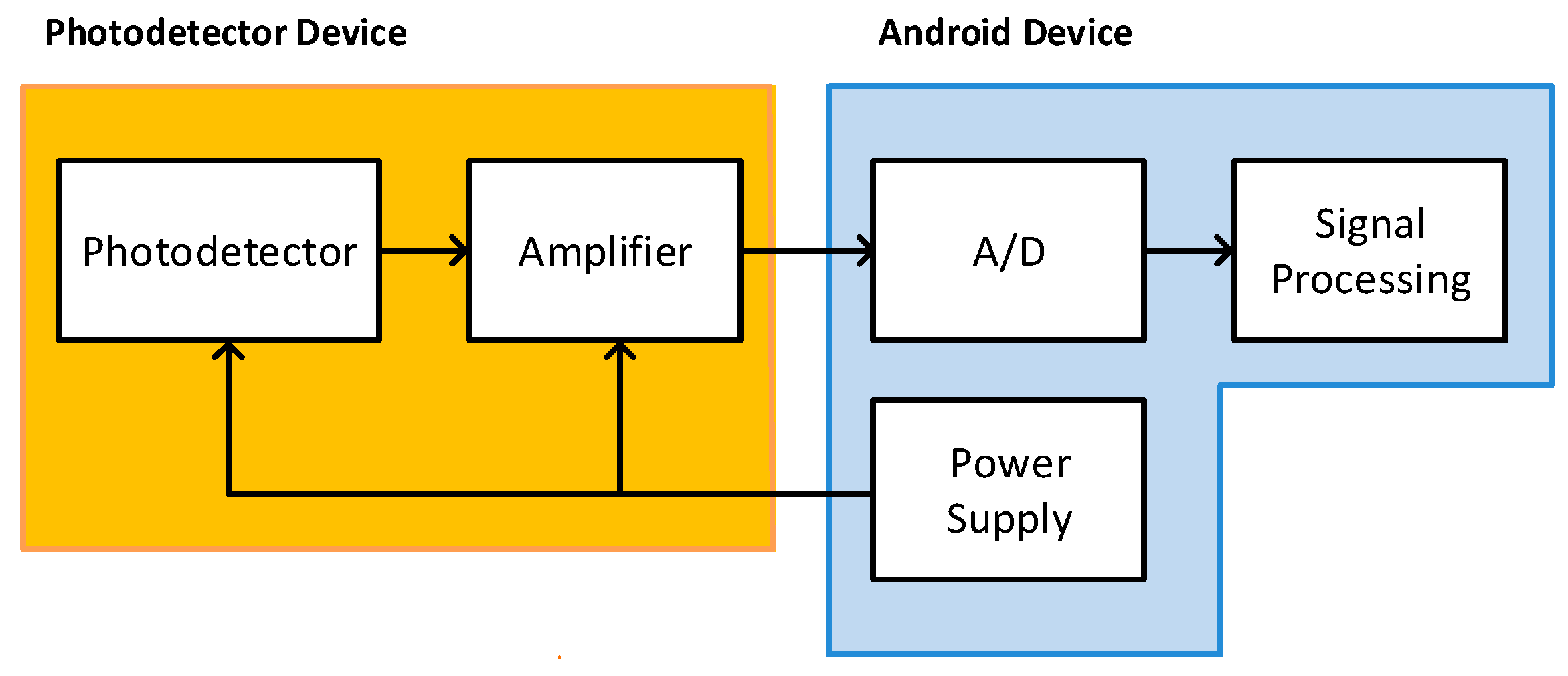
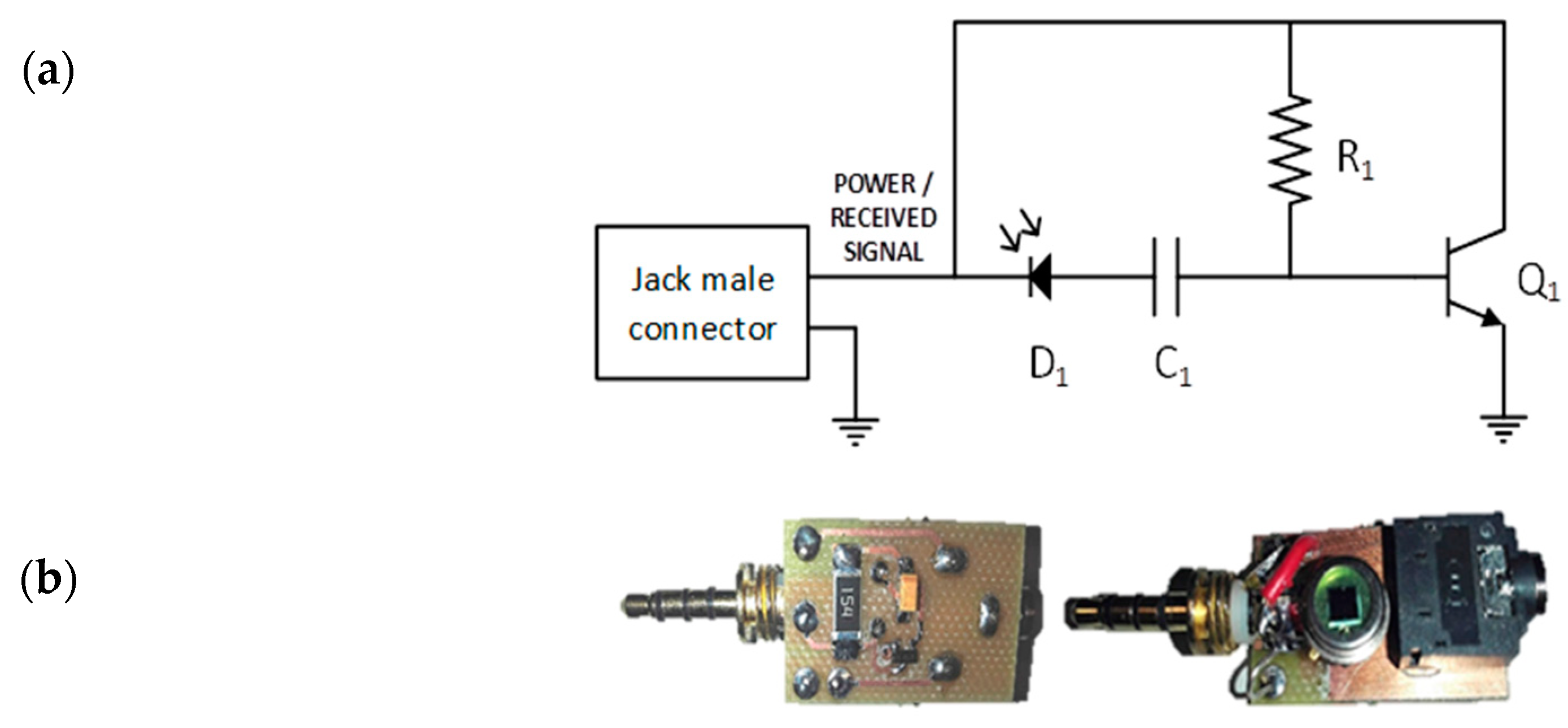
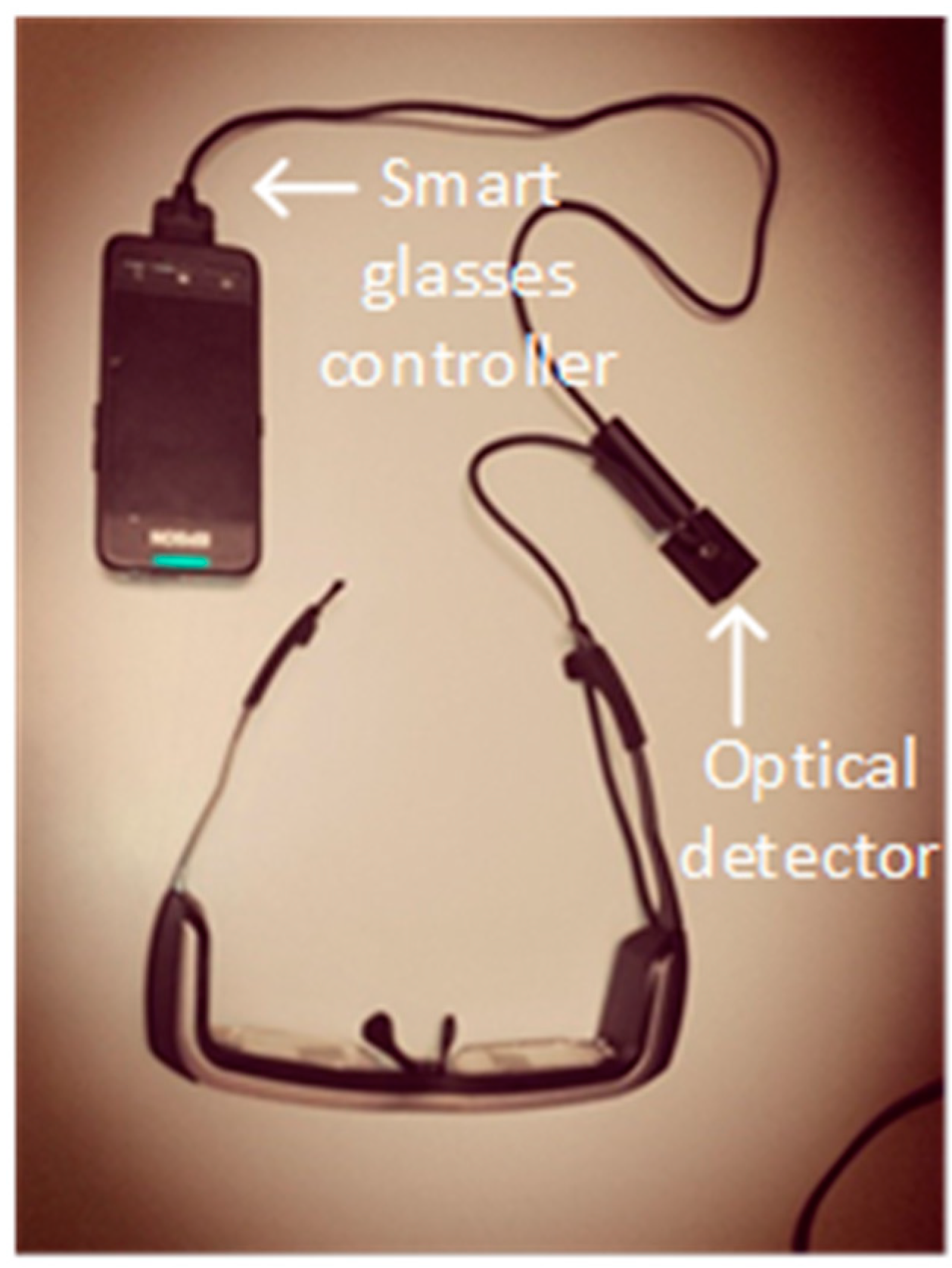
2.1.3. Optical Detector and Conditioning Electronics
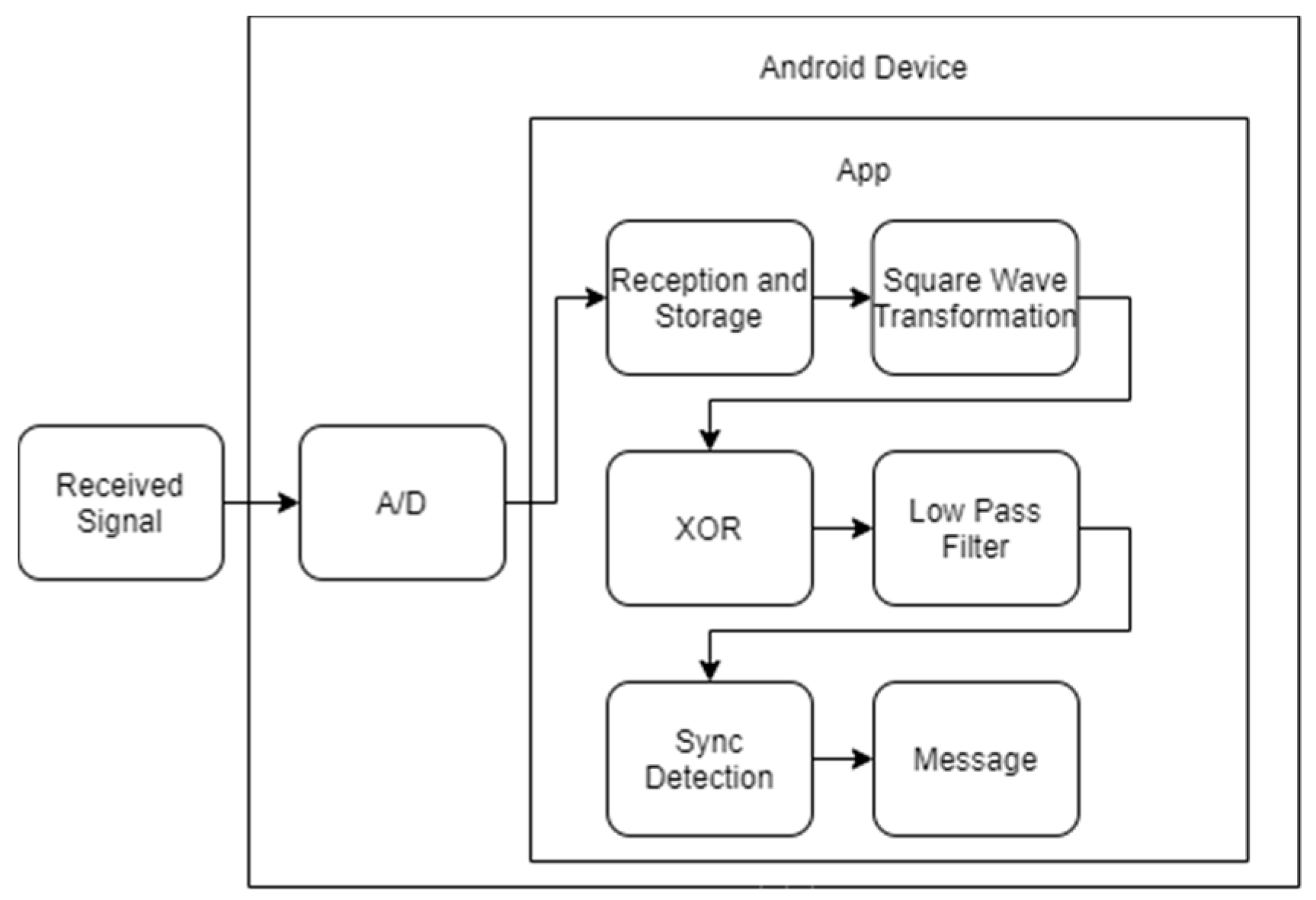
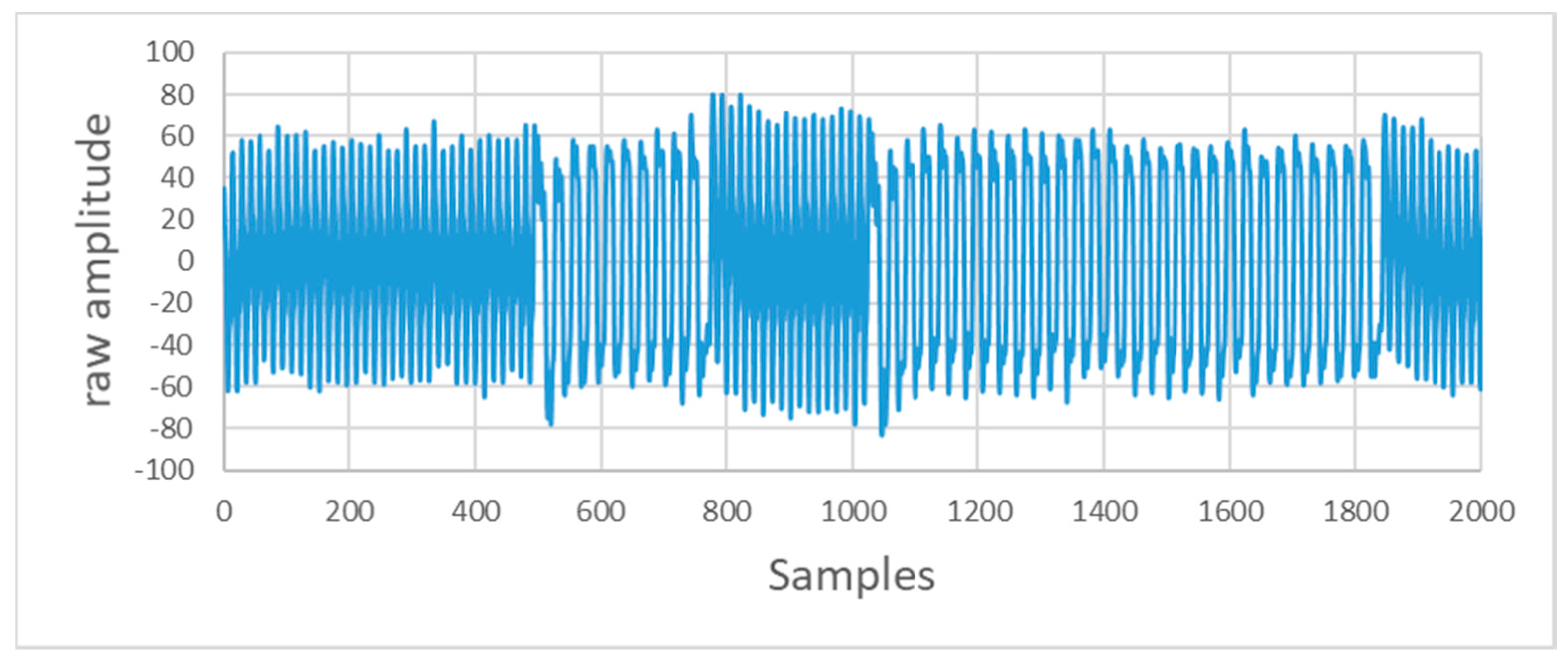
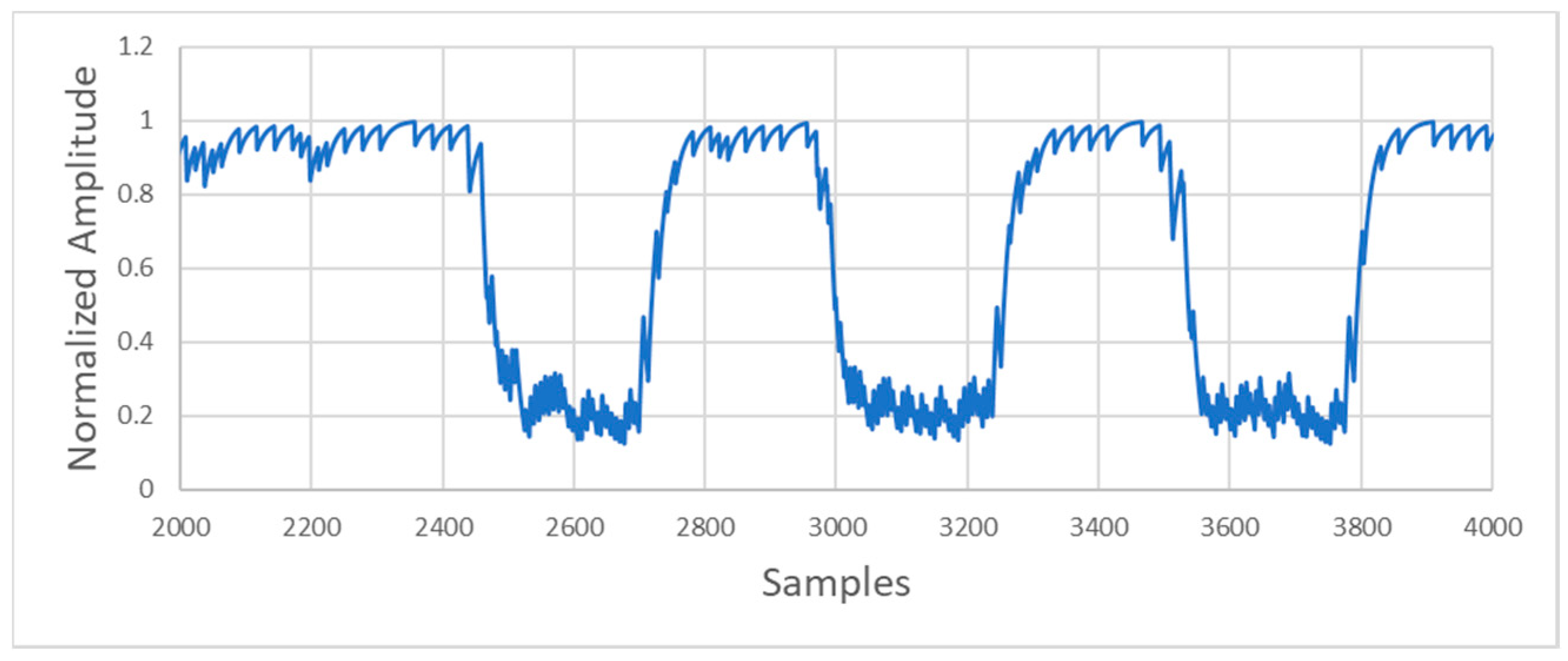
2.1.4. Signal Processing
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cross, B. How Location Technology and IoT Data Are Transforming Business, Forbes. Available online: https://www.forbes.com/sites/esri/2018/01/09/how-location-technology-and-iot-data-are-transforming-business/ (accessed on 5 March 2020).
- Bahl, P.; Padmanabhan, V.N. Radar: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000, Conference on Computer Communications, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No.00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar] [CrossRef]
- Afzalan, M.; Jazizadeh, F. Indoor positioning based on visible light communication: A performance-based survey of real-world prototypes. ACM Comput. Surv. (CSUR) 2019, 52, 1–36. [Google Scholar] [CrossRef]
- He, W.; Ho, P.-H.; Tapolcai, J. Beacon deployment for unambiguous positioning. IEEE Internet Things J. 2017, 4, 1370–1379. [Google Scholar] [CrossRef]
- Sakpere, W.; Oshin, M.A.; Mlitwa, N.B. A state-of-the-art survey of indoor positioning and navigation systems and technologies. S. Afr. Comput. J. 2017, 29, 145–197. [Google Scholar] [CrossRef]
- Del Campo-Jimenez, G.; Perandones, J.M.; Lopez-Hernandez, F.J. A VLC-based beacon location system for mobile applications. In Proceedings of the 2013 International Conference on Localization and GNSS (ICL-GNSS), Turin, Italy, 25–27 June 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Luo, J.; Fan, L.; Li, H. Indoor Positioning Systems Based on Visible Light Communication: State of the Art. IEEE Commun. Surv. Tutorial. 2017, 19, 2871–2893. [Google Scholar] [CrossRef]
- Lee, Y.U.; Kavehrad, M. Long-range indoor hybrid localization system design with visible light communications and wireless network. In Proceedings of the 2012 IEEE Photonics Society Summer Topical Meeting Series, Seattle, WA, USA, 9–11 July 2012; pp. 82–83. [Google Scholar] [CrossRef]
- Lee, Y.U.; Kavehrad, M. ‘Two hybrid positioning system design techniques with lighting LEDs and ad-hoc wireless network’. IEEE Trans. Consum. Electron. 2012, 58, 1176–1184. [Google Scholar] [CrossRef]
- Sertthin, C.; Tsuji, E.; Nakagawa, M.; Kuwano, S.; Watanabe, K. A switching estimated receiver position scheme for visible light based indoor positioning system. In Proceedings of the 2009 4th International Symposium on Wireless Pervasive Computing, Melbourne, Australia, 11–13 February 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Yang, S.-H.; Jeong, E.-M.; Kim, D.-R.; Kim, H.-S.; Son, Y.-H.; Han, S.-K. Indoor three-dimensional location estimation based on LED visible light communication. Electron. Lett. 2013, 49, 54–56. [Google Scholar] [CrossRef]
- See, Y.C.; Noor, N.M.; Calvin, T.Y.M. Investigation of indoor positioning system using visible light communication. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 186–189. [Google Scholar] [CrossRef]
- Vongkulbhisal, J.; Chantaramolee, B.; Zhao, Y.; Mohammed, W.S. A fingerprinting-based indoor localization system using intensity modulation of light emitting diodes. Microw. Opt. Technol. Lett. 2012, 54, 1218–1227. [Google Scholar] [CrossRef]
- Jung, S.-Y.; Hann, S.; Park, S.; Park, C.-S. Optical wireless indoor positioning system using light emitting diode ceiling lights. Microw. Opt. Technol. Lett. 2012, 54, 1622–1626. [Google Scholar] [CrossRef]
- Kail, G.; Maechler, P.; Preyss, N.; Burg, A. Robust asynchronous indoor localization using LED lighting. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 1866–1870. [Google Scholar] [CrossRef]
- Lim, J. Ubiquitous 3D positioning systems by led-based visible light communications. IEEE Wirel. Commun. 2015, 22, 80–85. [Google Scholar] [CrossRef]
- Nadeem, U.; Hassan, N.U.; Pasha, M.A.; Yuen, C. Indoor positioning system designs using visible LED lights: Performance comparison of TDM and FDM protocols. Electron. Lett. 2015, 51, 72–74. [Google Scholar] [CrossRef]
- Sciarrone, A.; Fiandrino, C.; Bisio, I.; Lavagetto, F.; Kliazovich, D.; Bouvry, P. Smart probabilistic fingerprinting for indoor localization over fog computing platforms. In Proceedings of the 2016 5th IEEE International Conference on Cloud Networking (Cloudnet), Pisa, Italy, 3–5 October 2016; pp. 39–44. [Google Scholar] [CrossRef]
- González, J.L.S.; Morillo, L.M.S.; Álvarez-García, J.A.; Ros, F.E.D.S.; Ruiz, A.R.J. Energy-efficient indoor localization WiFi-fingerprint system: An experimental study. IEEE Access 2019, 7, 162664–162682. [Google Scholar] [CrossRef]
- Seguine, D. FSK Detection Using PSoC. Cypress Semiconductor Corporation. Available online: https://www.cypress.com/file/73096/download (accessed on 5 March 2020).


















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torres, J.C.; Montes, A.; Mendoza, S.L.; Fernández, P.R.; Betancourt, J.S.; Escandell, L.; del Valle, C.I.; Sánchez-Pena, J.M. A Low-Cost Visible Light Positioning System for Indoor Positioning. Sensors 2020, 20, 5145. https://doi.org/10.3390/s20185145
Torres JC, Montes A, Mendoza SL, Fernández PR, Betancourt JS, Escandell L, del Valle CI, Sánchez-Pena JM. A Low-Cost Visible Light Positioning System for Indoor Positioning. Sensors. 2020; 20(18):5145. https://doi.org/10.3390/s20185145
Chicago/Turabian StyleTorres, Juan Carlos, Aitor Montes, Sandra L. Mendoza, Pedro R. Fernández, Juan S. Betancourt, Lorena Escandell, Carlos I. del Valle, and José Manuel Sánchez-Pena. 2020. "A Low-Cost Visible Light Positioning System for Indoor Positioning" Sensors 20, no. 18: 5145. https://doi.org/10.3390/s20185145
APA StyleTorres, J. C., Montes, A., Mendoza, S. L., Fernández, P. R., Betancourt, J. S., Escandell, L., del Valle, C. I., & Sánchez-Pena, J. M. (2020). A Low-Cost Visible Light Positioning System for Indoor Positioning. Sensors, 20(18), 5145. https://doi.org/10.3390/s20185145