Novel Laser-Based Obstacle Detection for Autonomous Robots on Unstructured Terrain



Abstract
1. Introduction
2. Materials and Methods
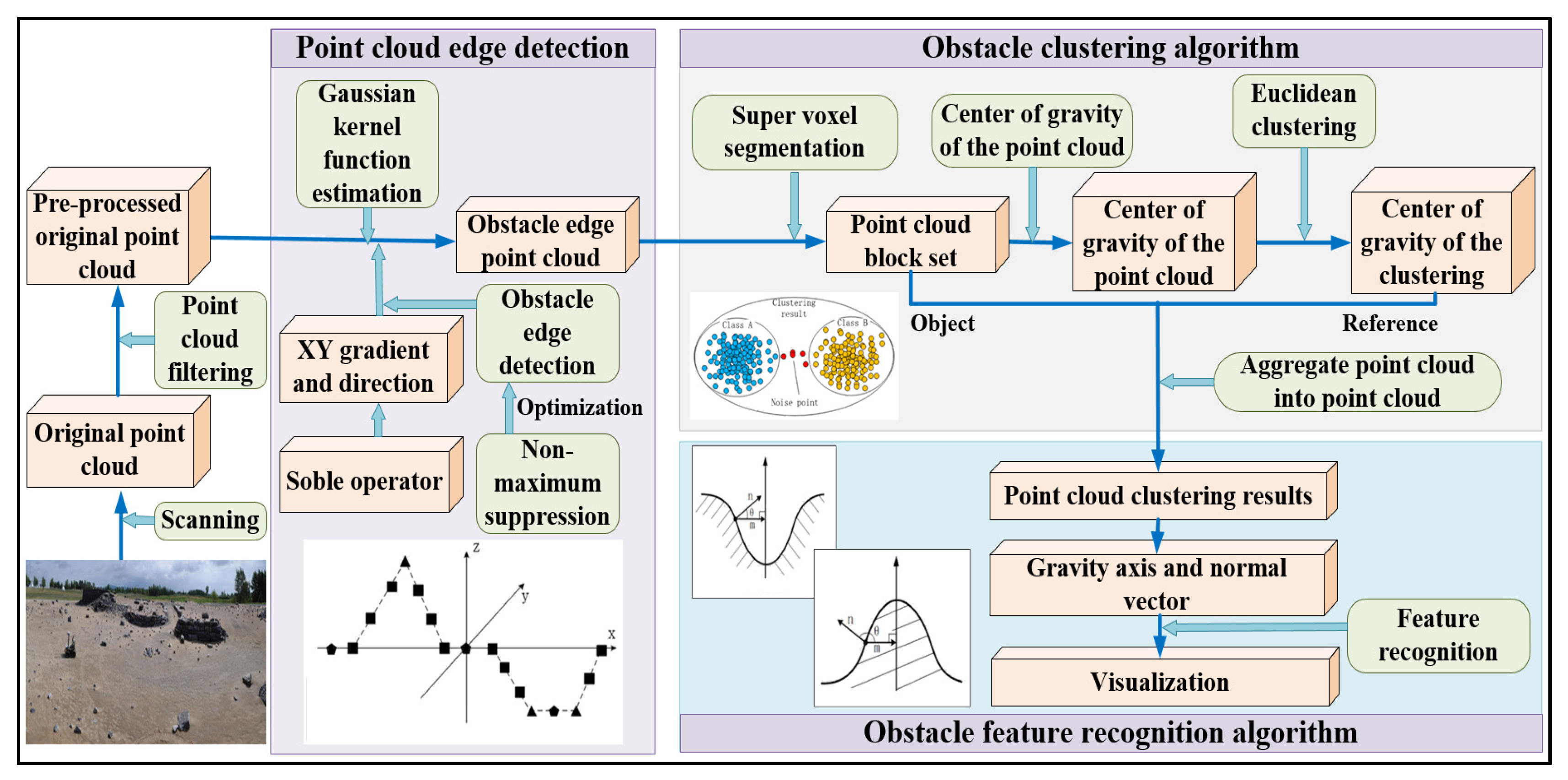
2.1. Introduction
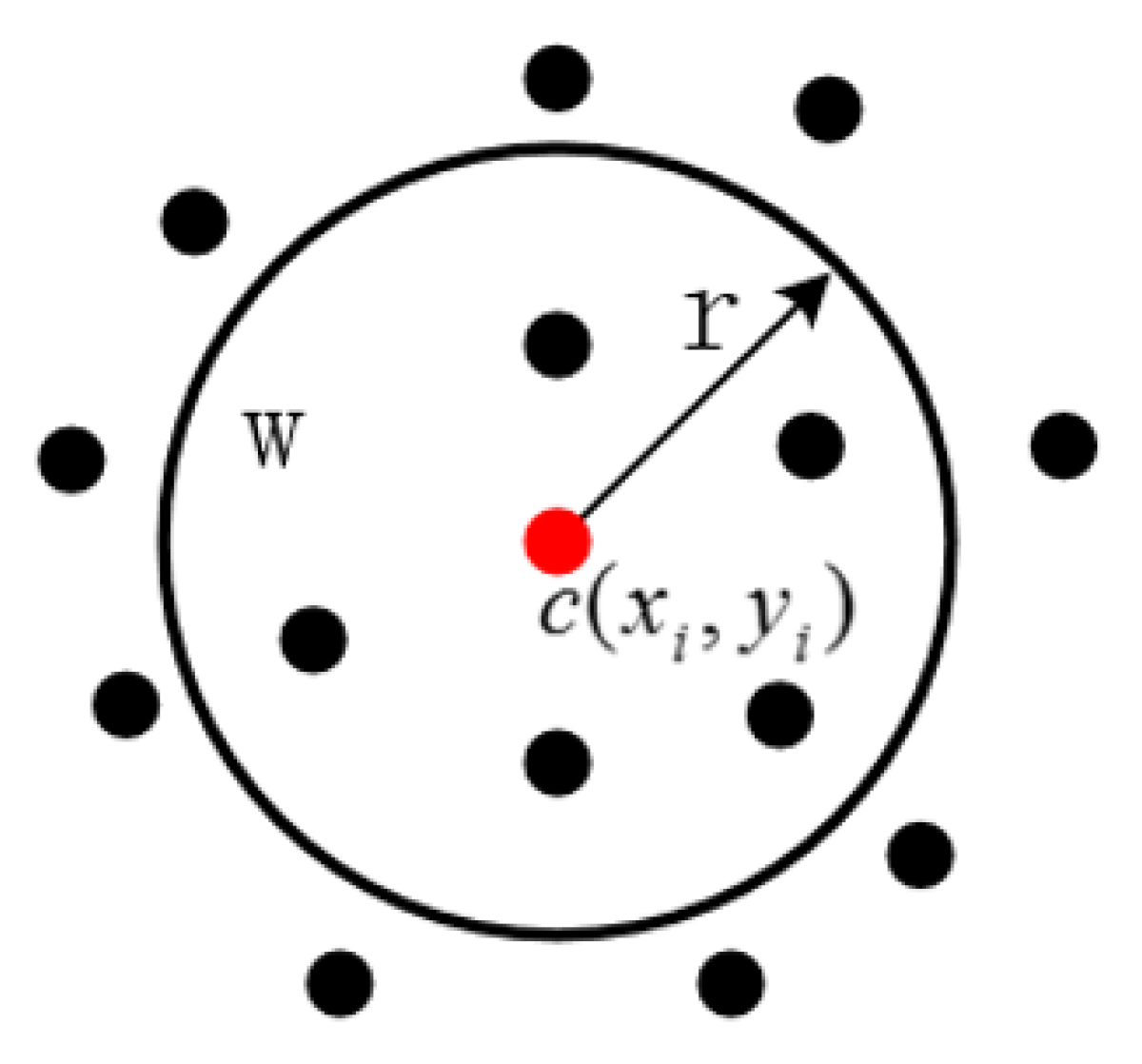
2.2. Point Cloud Edge-Detection Algorithm
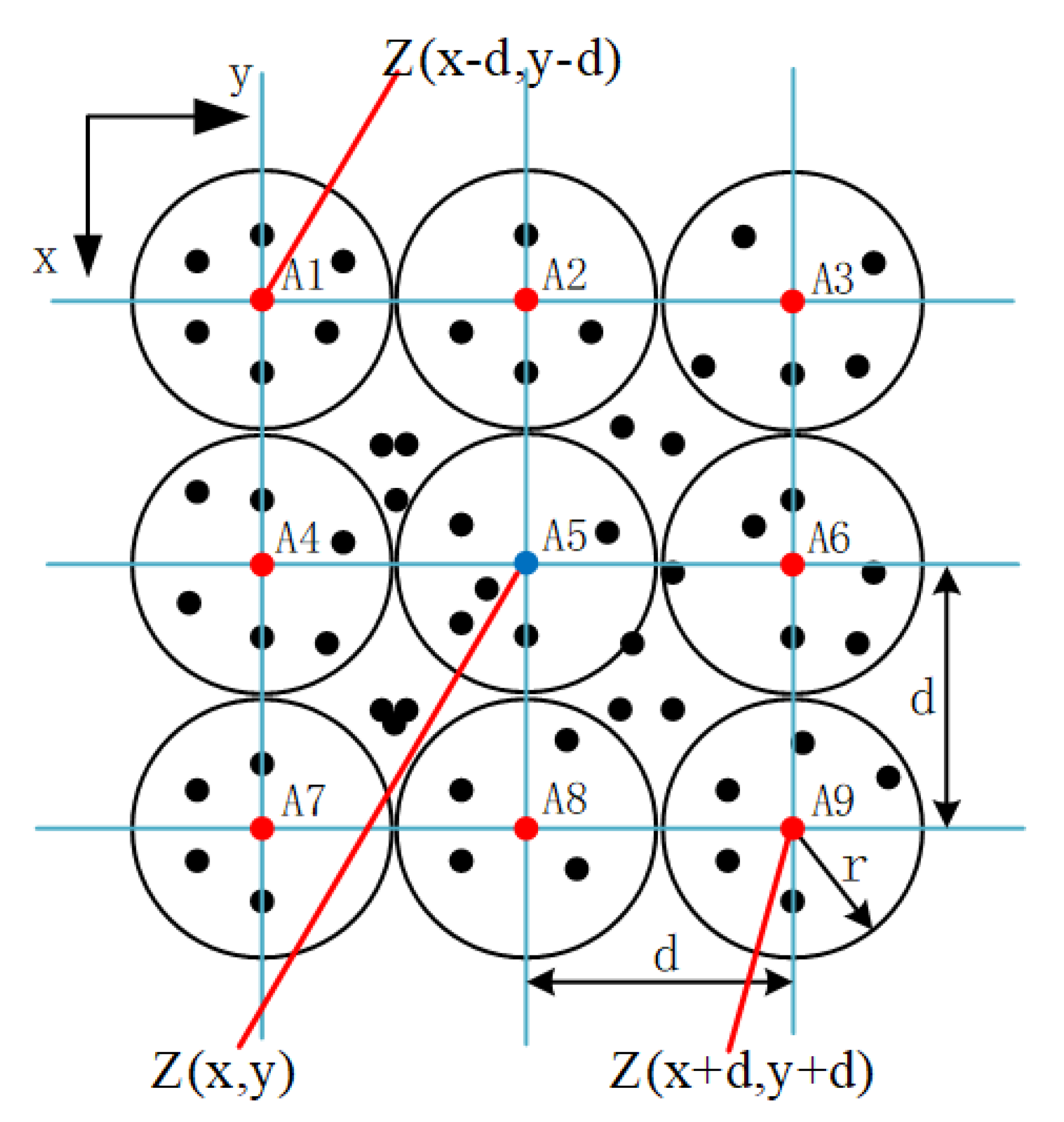
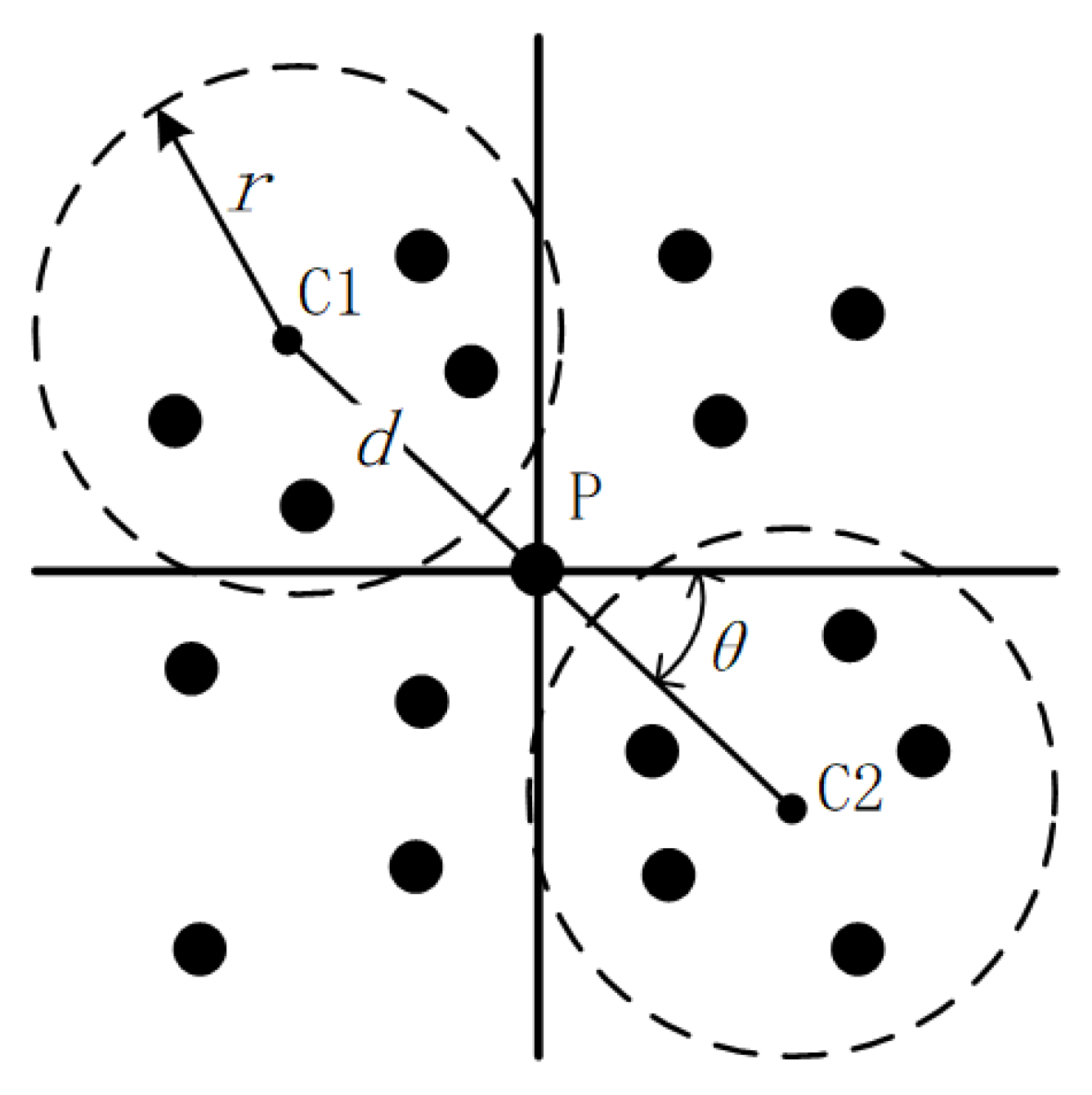
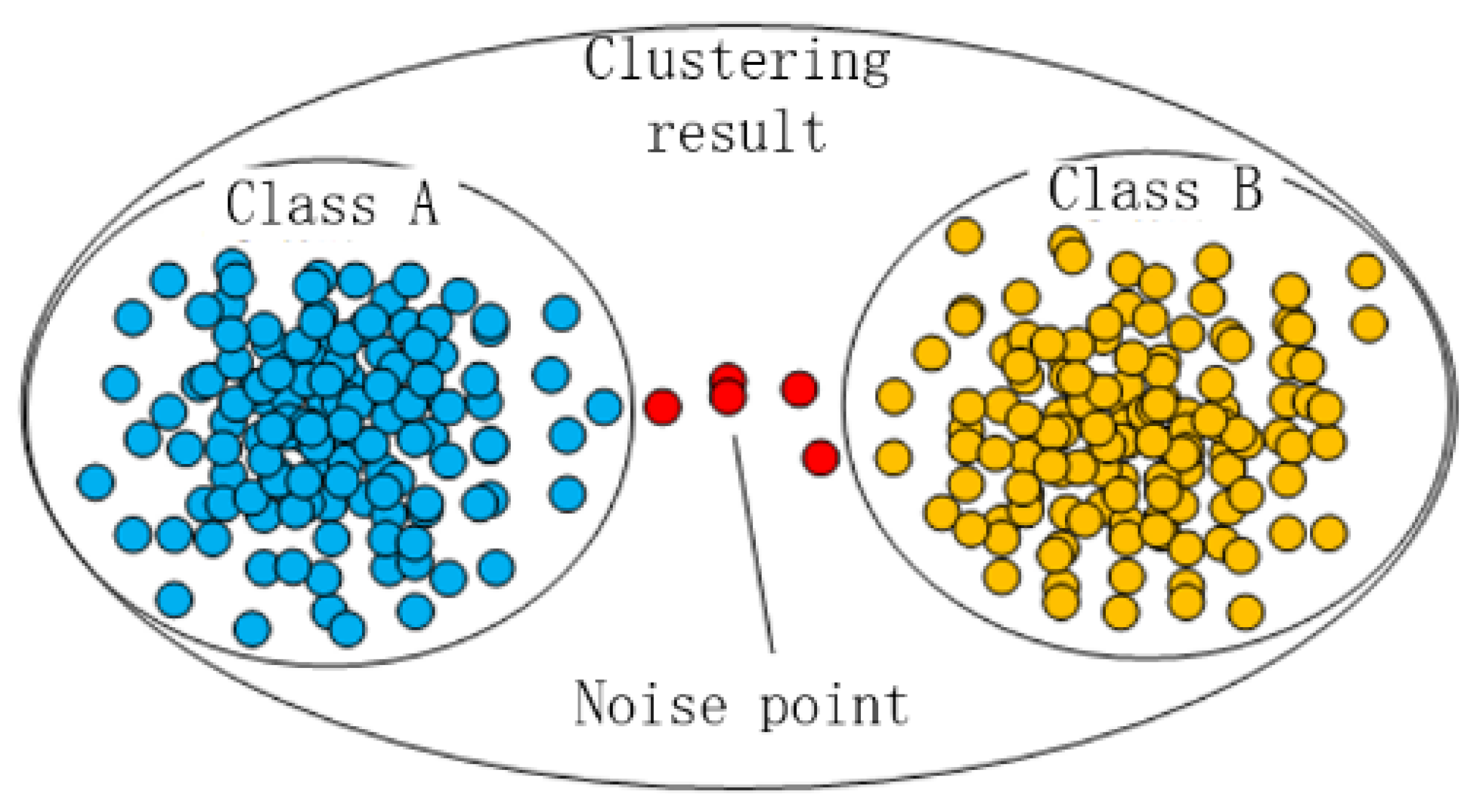
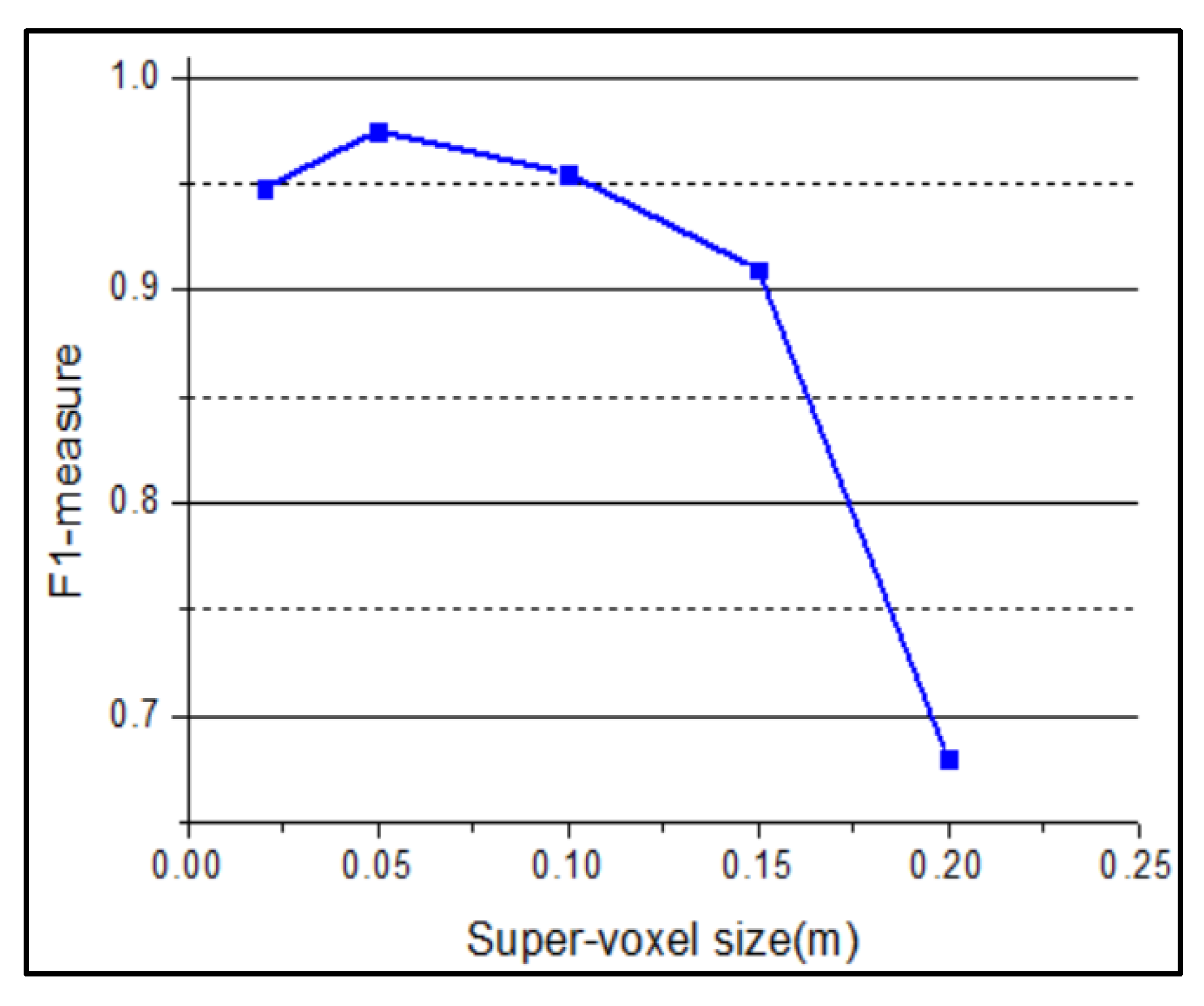
2.3. Obstacle Clustering Algorithm with Super-Voxel Segmentation
| Algorithm 1 Single Point Cloud Clustering |
| Input: A point in point cloud (P) |
| Output: Group of points (Q) |
|
| Algorithm 2 Obstacle point cloud clustering |
| Input: Original point cloud (O) |
| Output: Point cloud of obstacle clustering (C) |
|
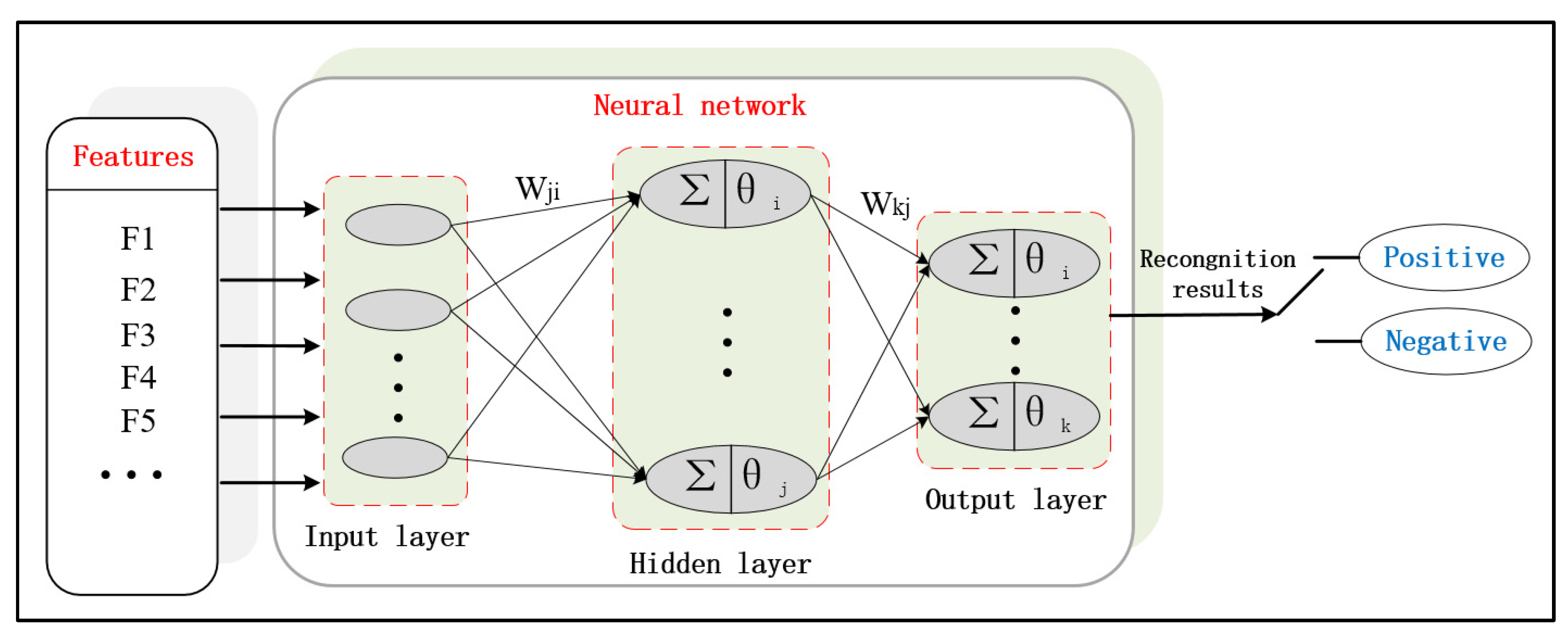
3. Obstacle Feature Recognition Based on Levenberg–Marquardt Back-Propagation (LM-BP) Neural Network
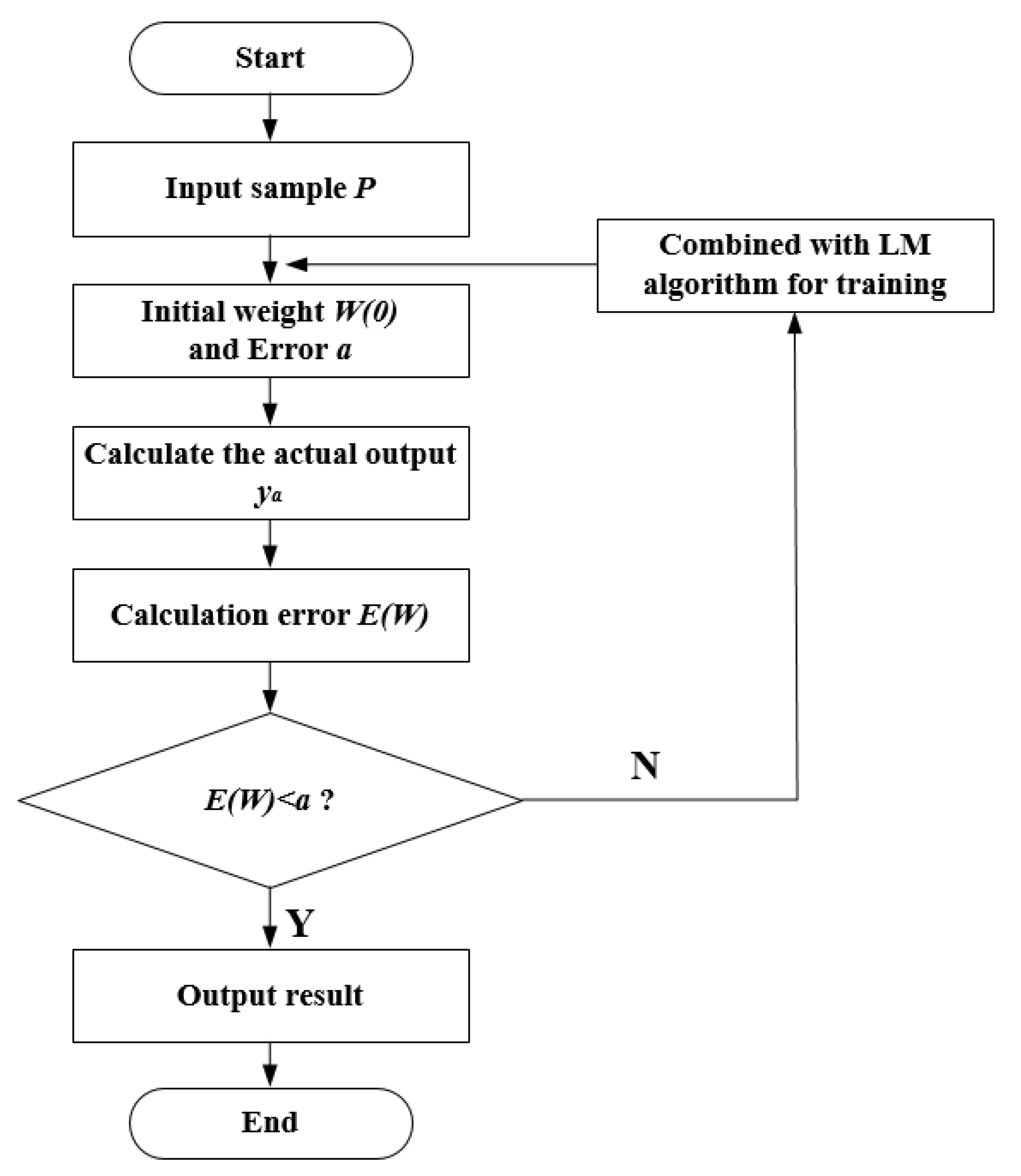
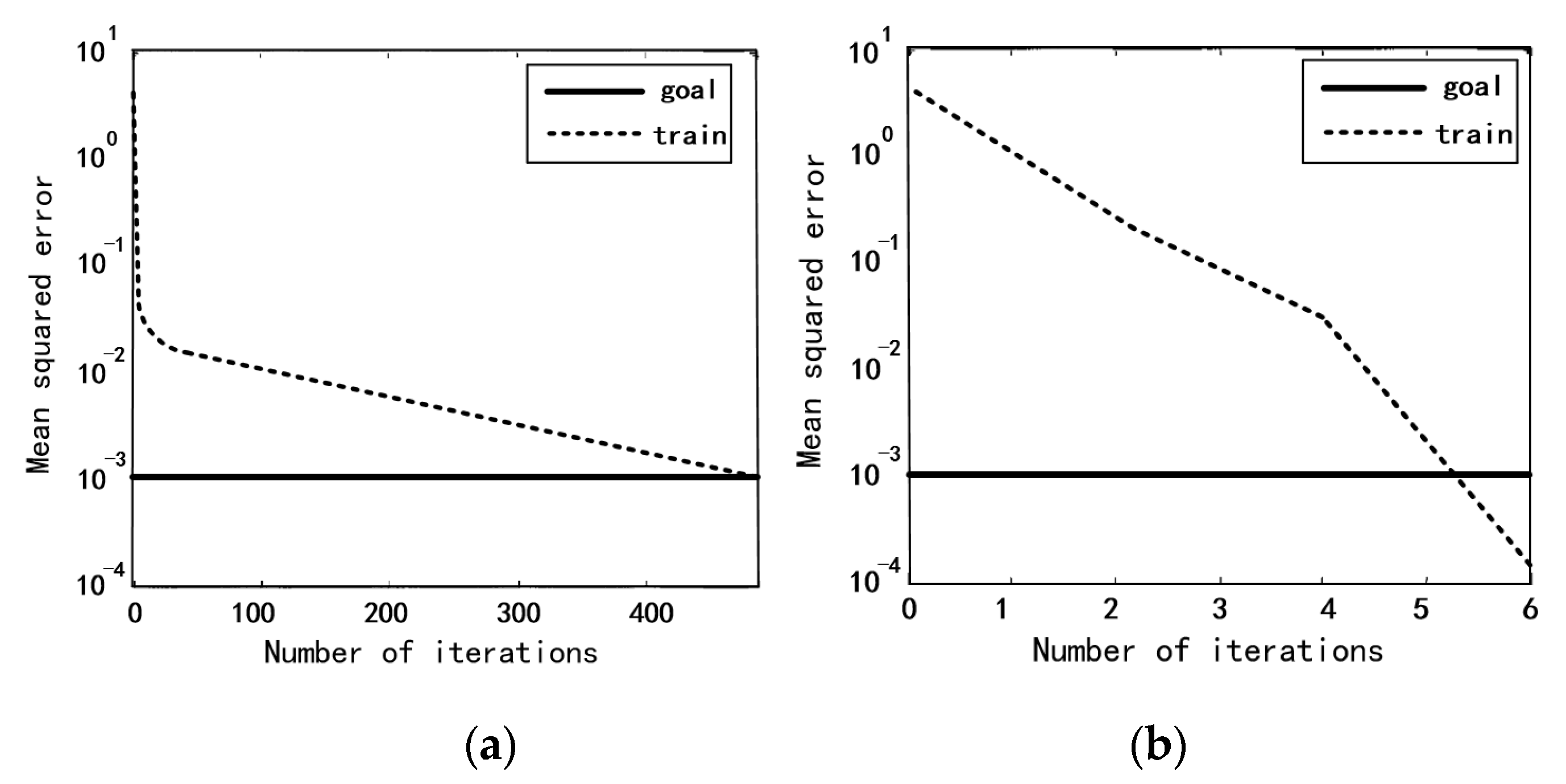
3.1. BP Neural Network Optimized by LM (Levenberg–Marquardt) Algorithm
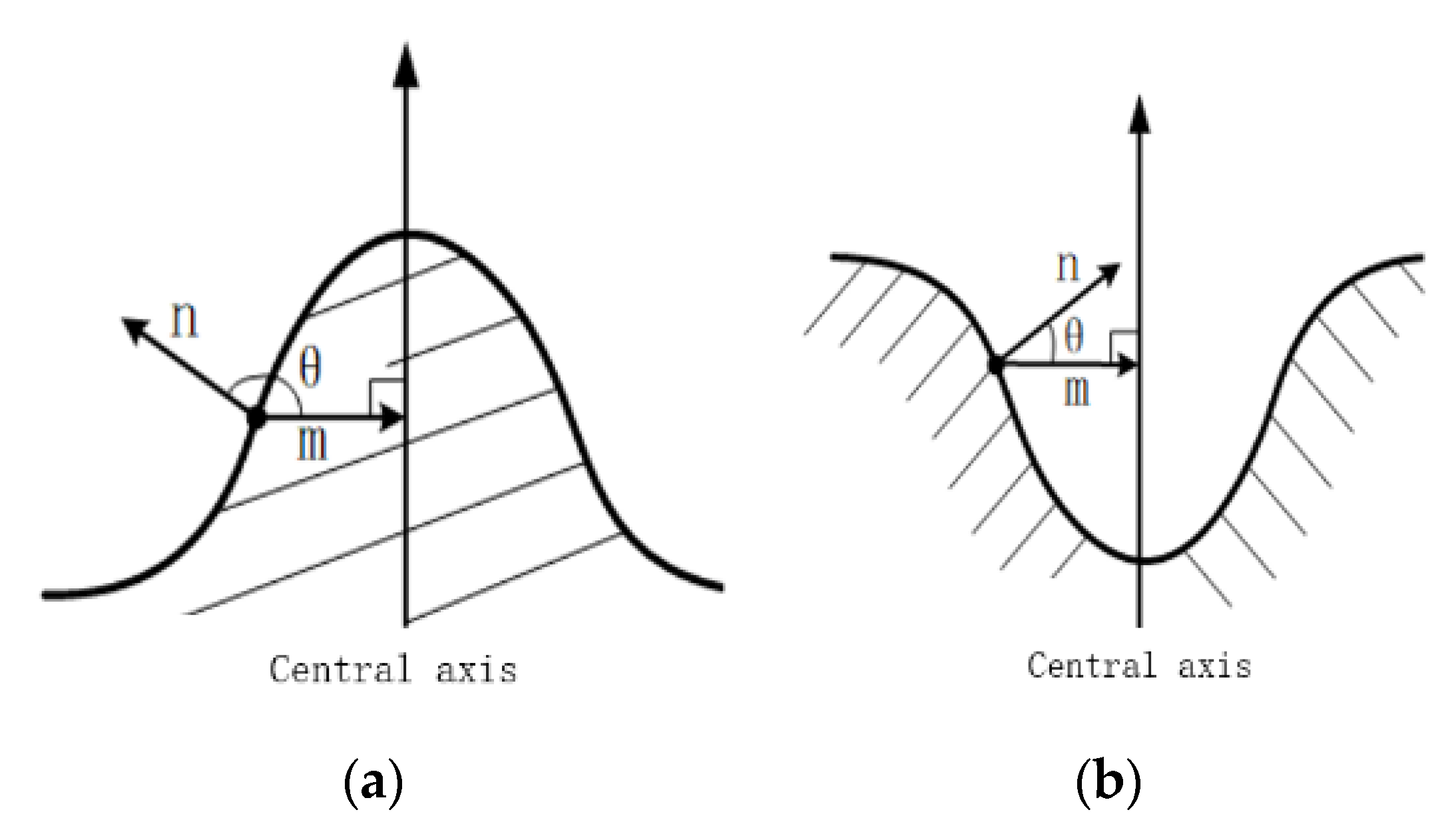
3.2. Feature Selection and Evaluation Indicators
4. Experimental Verification on Dataset
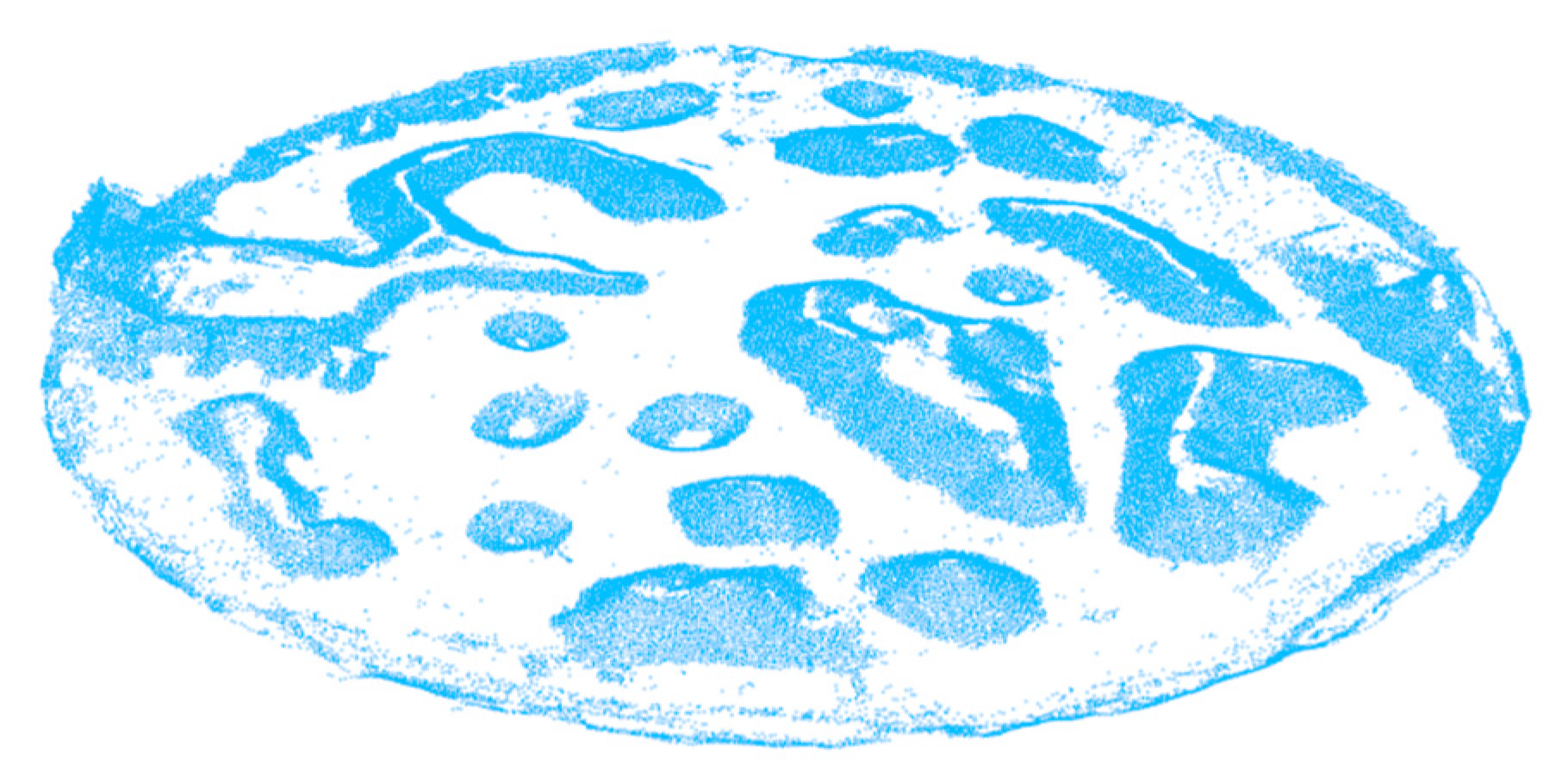
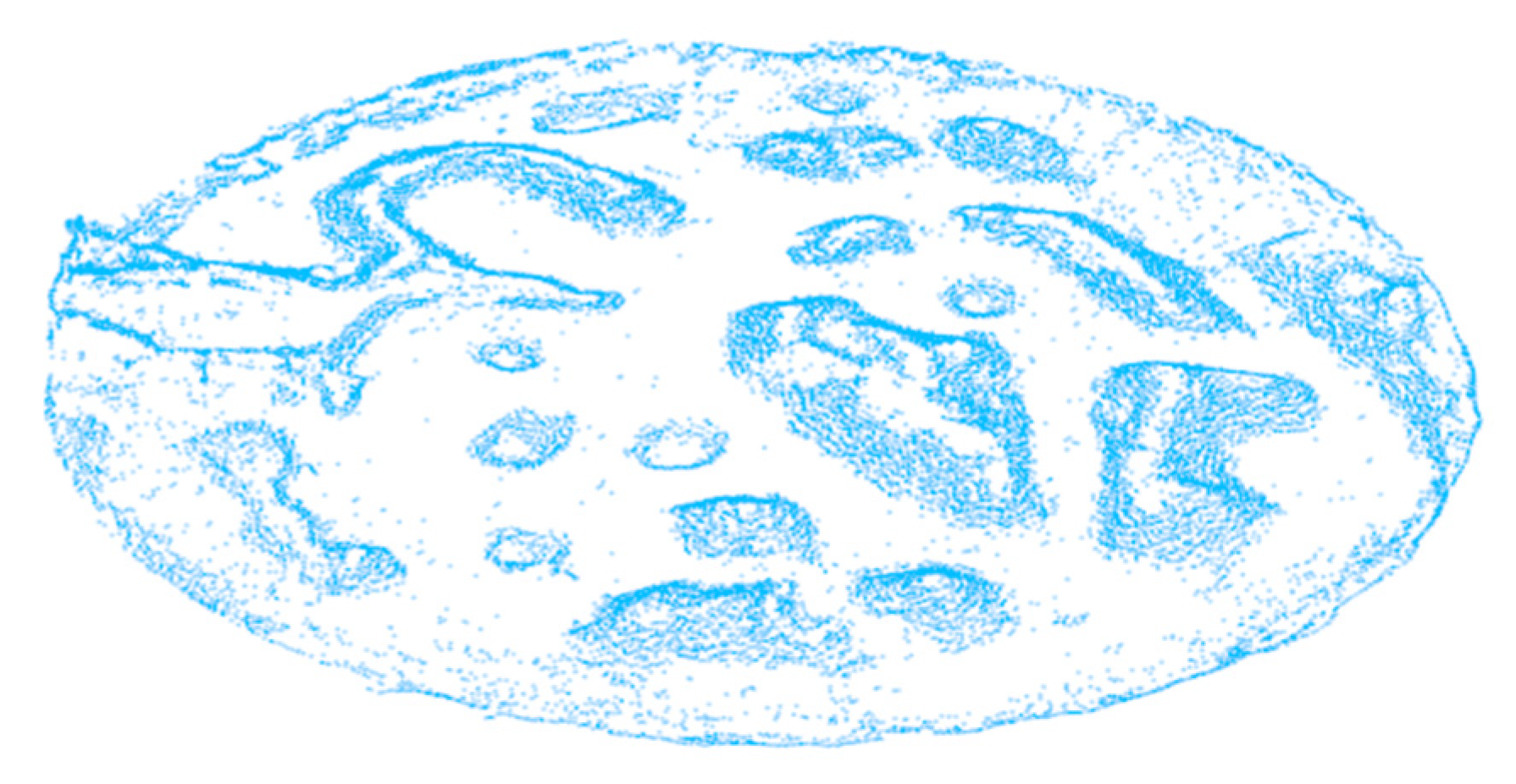
4.1. Obstacle Edge-Extraction Experiment of Terrain Point Cloud
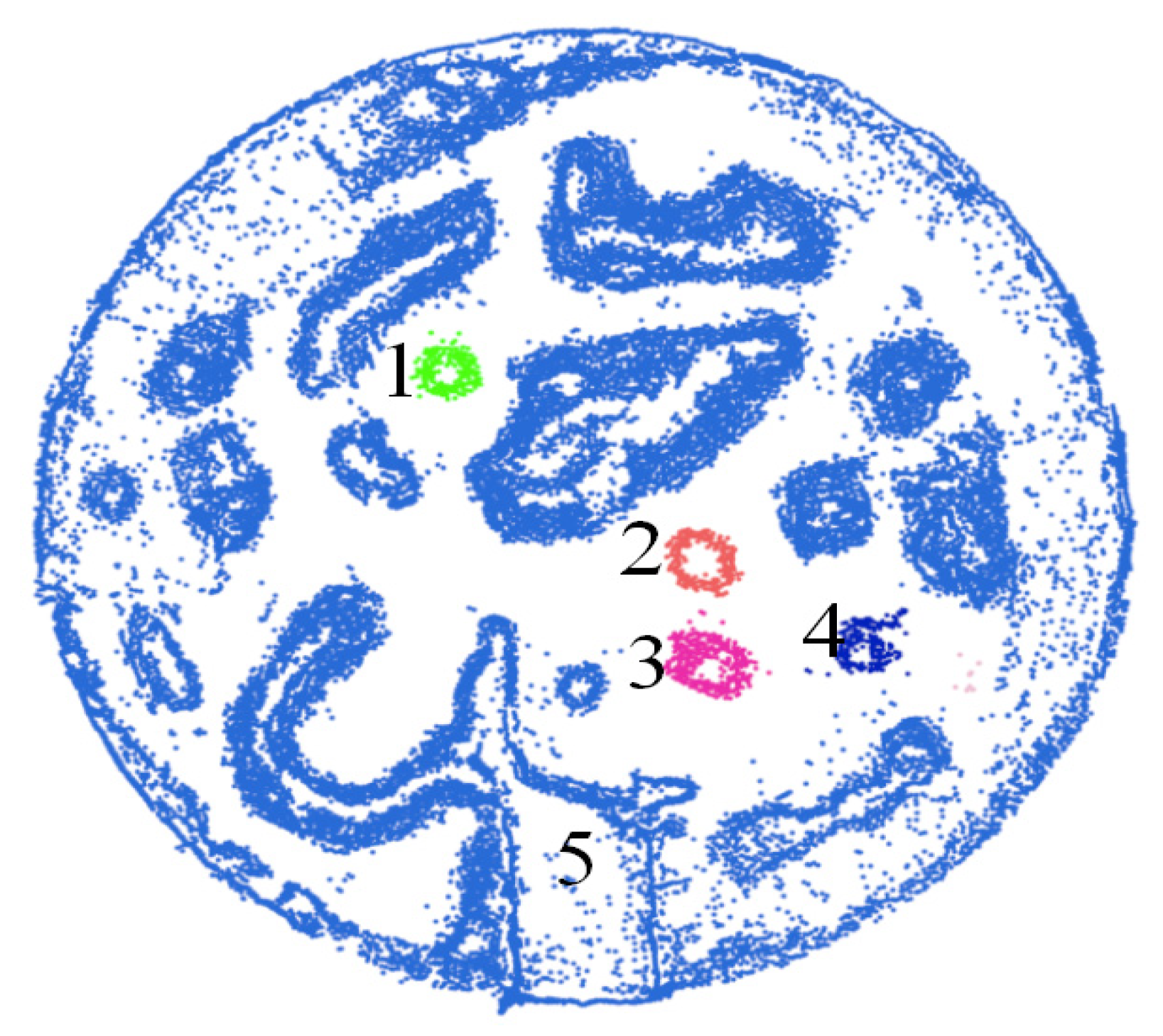
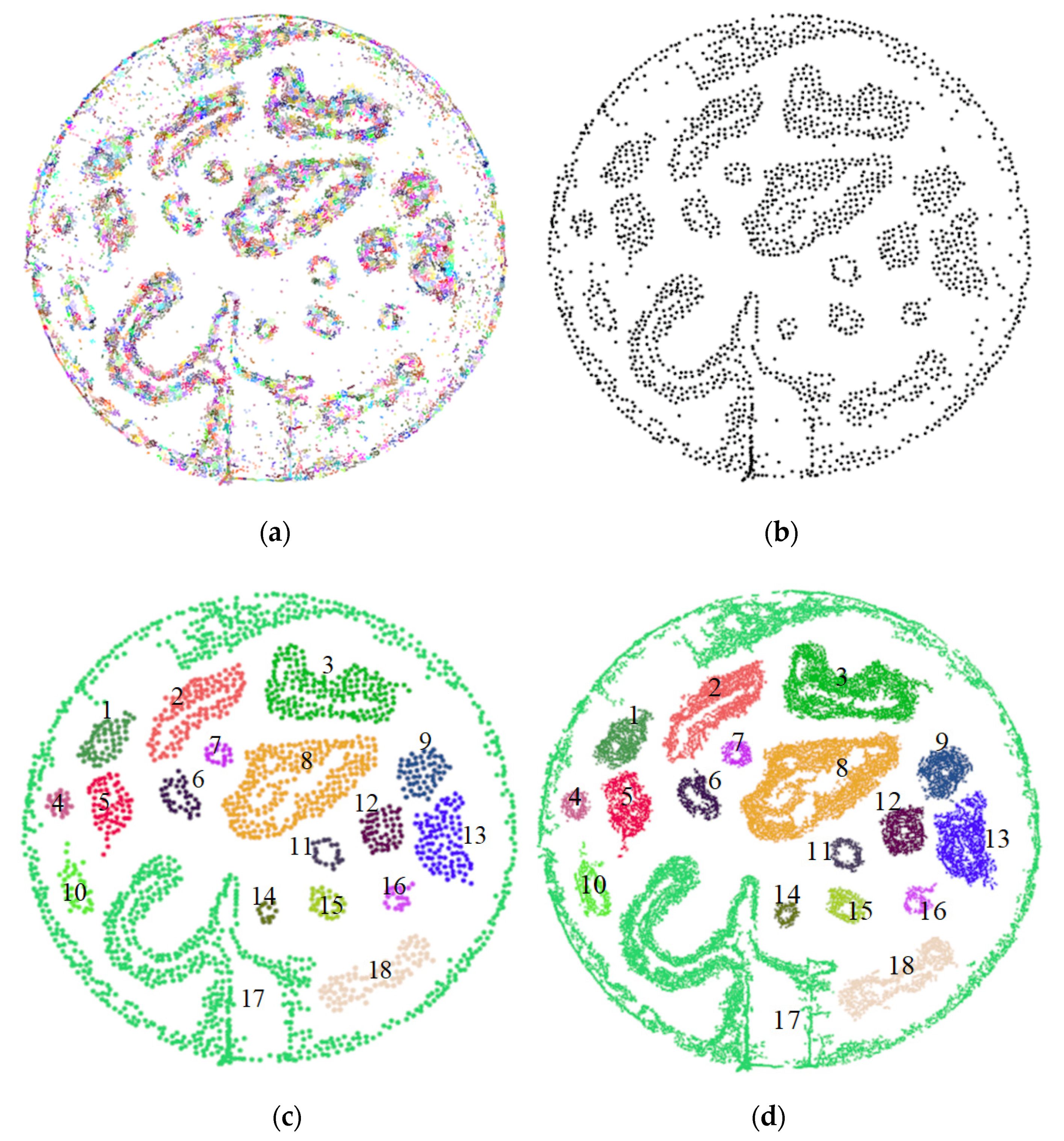
4.2. Obstacle Clustering Experiment of Terrain Point Cloud
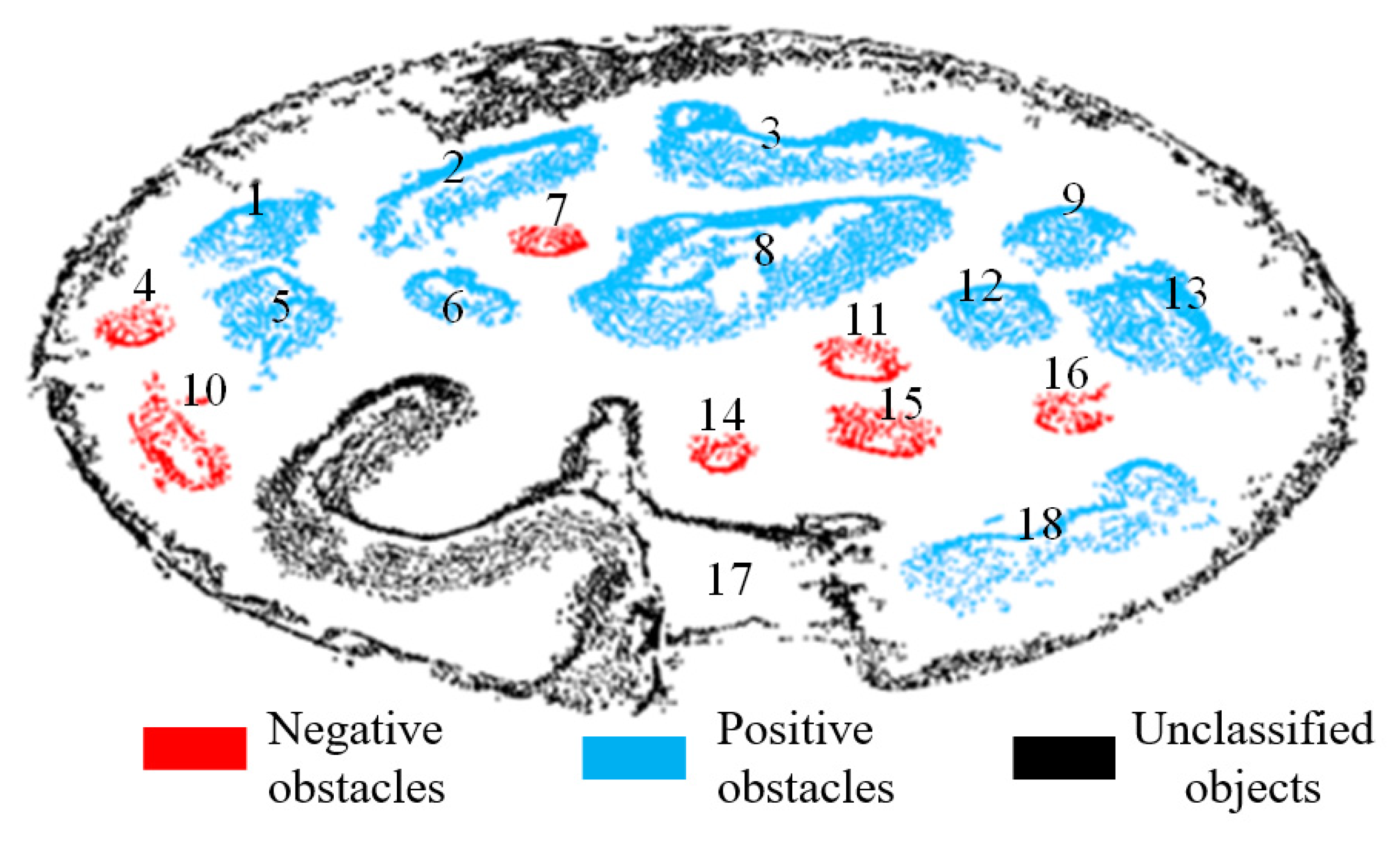
4.3. Experiment of Recognising Obstacles on Terrain Point Clouds
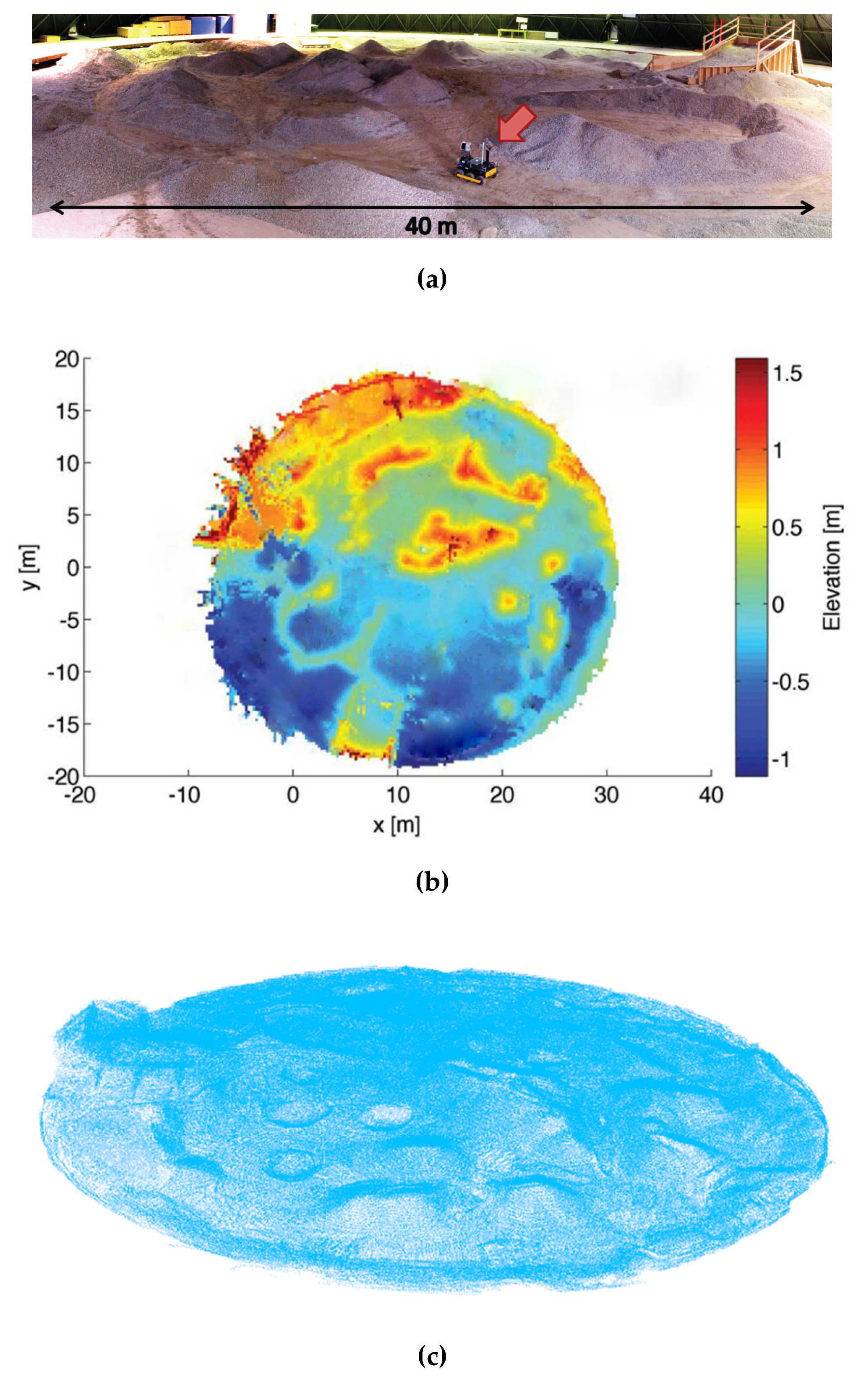
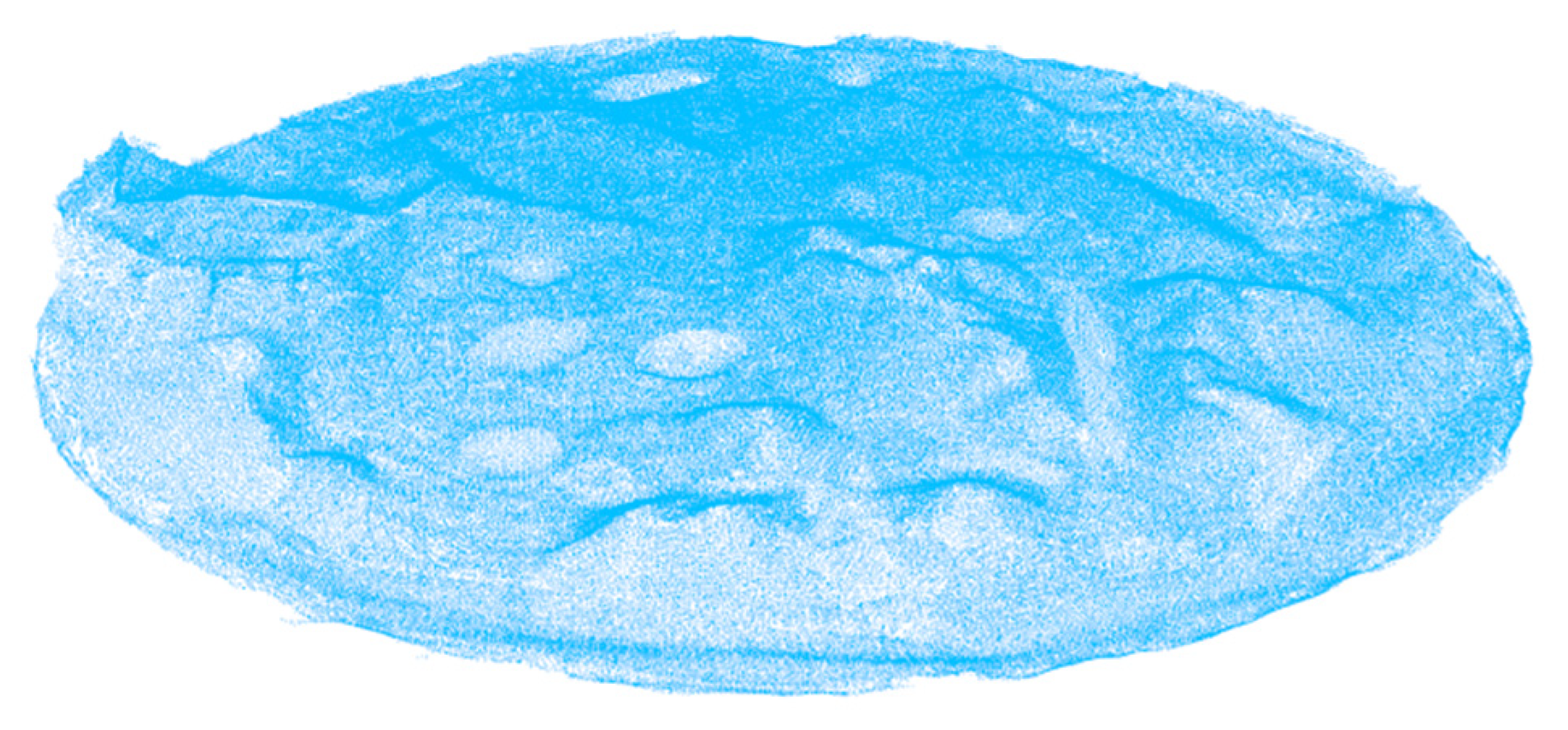
5. Experimental Verification on Real Unstructured Terrain
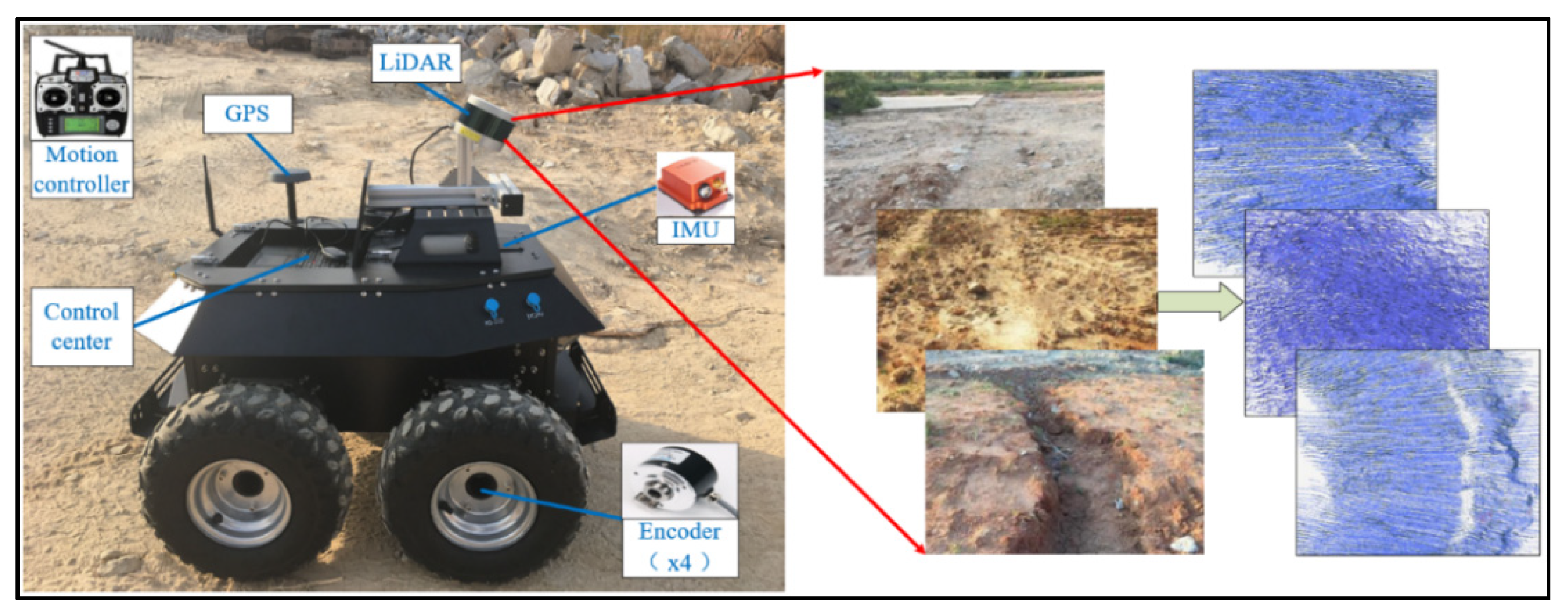
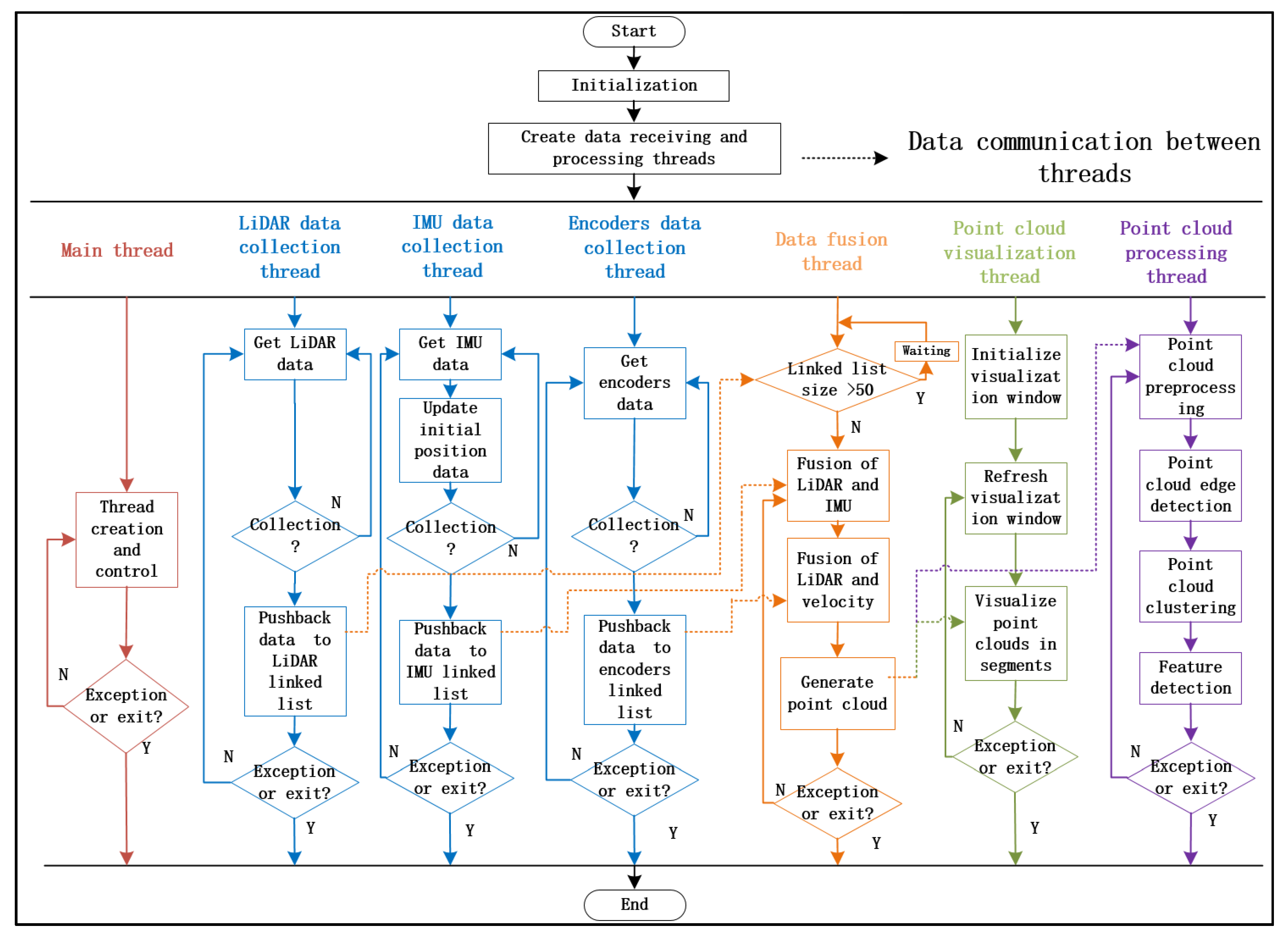
5.1. System Configuration
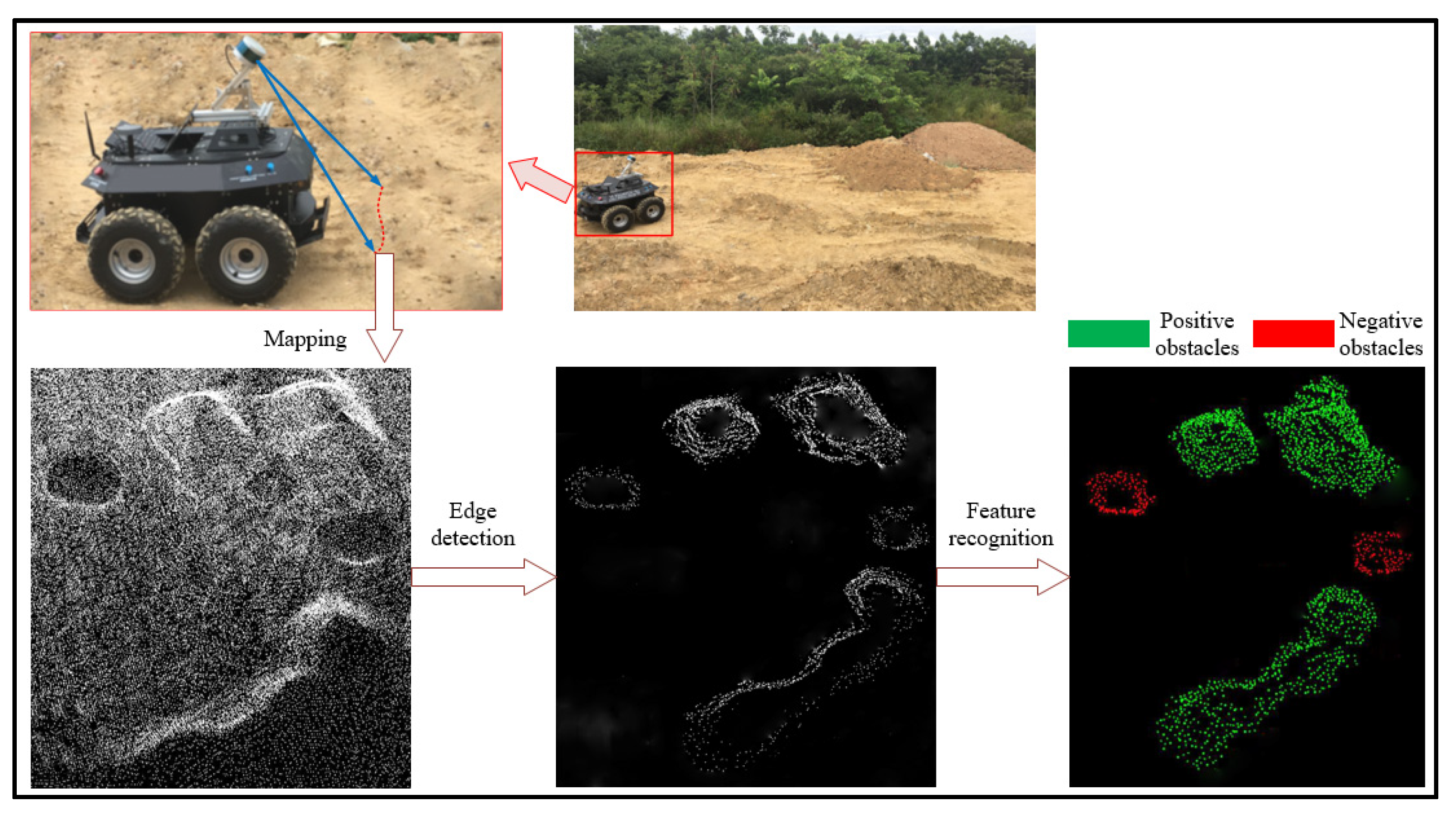
5.2. Real Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bernard, M.; Kondak, K.; Maza, I.; Ollero, A. Autonomous transportation and deployment with aerial robots for search and rescue missions. J. Field Robot. 2011, 28, 914–931. [Google Scholar] [CrossRef]
- Dooraki, A.R.; Lee, D.J. An end-to-end deep reinforcement learning-based intelligent agent capable of autonomous exploration in unknown environments. Sensors 2018, 18, 3575. [Google Scholar] [CrossRef] [PubMed]
- Hagras, H.; Sobh, T. Intelligent learning and control of autonomous robotic agents operating in unstructured environments. Inf. Sci. 2002, 145, 1–12. [Google Scholar] [CrossRef]
- Bjelonic, M.; Kottege, N.; Homberger, T.; Borges, P.; Beckerle, P.; Chli, M. Weaver: Hexapod robot for autonomous navigation on unstructured terrain. J. Field Robot. 2018, 35, 1063–1079. [Google Scholar] [CrossRef]
- Kolar, P.; Benavidez, P.; Jamshidi, M. Survey of datafusion techniques for laser and vision based sensor integration for autonomous navigation. Sensors 2020, 20, 2180. [Google Scholar] [CrossRef]
- Kayacan, E.; Young, S.N.; Peschel, J.M.; Chowdhary, G. High-precision control of tracked field robots in the presence of unknown traction coefficients. J. Field Robot. 2018, 35, 1050–1062. [Google Scholar] [CrossRef]
- Jayaratne, M.; de Silva, D.; Alahakoon, D. Unsupervised machine learning based scalable fusion for active perception. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1653–1663. [Google Scholar] [CrossRef]
- Kosaka, N.; Ohashi, G. Vision-based night-time vehicle detection using CenSurE and SVM. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2599–2608. [Google Scholar] [CrossRef]
- Cheon, M.; Lee, W.; Yoon, C.; Park, M. Vision-based vehicle detection system with consideration of the detecting location. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1243–1252. [Google Scholar] [CrossRef]
- Ross, P.; English, A.; Ball, D. Online covariance estimation for novelty-based visual obstacle detection. J. Field Robot. 2017, 34, 1469–1488. [Google Scholar] [CrossRef]
- Yu, H.S.; Zhu, J.; Wang, Y.N.; Jia, W.Y.; Sun, M.G.; Tang, Y.D. Obstacle classification and 3D measurement in unstructured environments based on ToF cameras. Sensors 2014, 14, 10753–10782. [Google Scholar] [CrossRef] [PubMed]
- Wu, F.; Wen, C.L.; Guo, Y.L.; Wang, J.J.; Yu, Y.T.; Wang, C.; Li, J. Rapid localization and extraction of street light poles in mobile LiDAR point clouds: A Supervoxel-based approach. IEEE Trans. Intell. Transp. Syst. 2017, 18, 292–305. [Google Scholar] [CrossRef]
- Pang, C.; Zhong, X.Y.; Hu, H.S.; Tian, J.; Peng, X.F.; Zeng, J.P. Adaptive obstacle detection for mobile robots in urban environments using downward-looking 2D LiDAR. Sensors 2018, 18, 1749. [Google Scholar] [CrossRef] [PubMed]
- Williams, K.; Olsen, M.J.; Roe, G.V.; Glennie, C. Synthesis of transportation applications of mobile LiDAR. Remote Sens. 2013, 5, 4652–4692. [Google Scholar] [CrossRef]
- Bietresato, M.; Carabin, G.; Vidoni, R.; Gasparetto, A.; Mazzetto, F. Evaluation of a LiDAR-based 3D-stereoscopic vision system for crop-monitoring applications. Comput. Electron. Agric. 2016, 124, 1–13. [Google Scholar] [CrossRef]
- Yu, Y.T.; Li, J.; Guan, H.Y.; Wang, C. Automated extraction of urban road facilities using mobile laser scanning data. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2167–2181. [Google Scholar] [CrossRef]
- Morales, N.; Toledo, J.; Acosta, L.; Sanchez-Medina, J. A combined voxel and particle filter-based approach for fast obstacle detection and tracking in automotive applications. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1824–1834. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, H.; Qian, Y.L.; Xu, T. Real-Time Plane Segmentation and Obstacle Detection of 3D Point Clouds for Indoor Scenes. In Proceedings of the 12th European Conference on Computer Vision (ECCV), Florence, Italy, 7–13 October 2012. [Google Scholar]
- Diaz-Vilarino, L.; Boguslawski, P.; Khoshelham, K.; Lorenzo, H.; Mahdjoubi, L. Indoor navigation from point clouds: 3D modelling and obstacle detection. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 275–281. [Google Scholar] [CrossRef]
- Fountas, S.; Mylonas, N.; Malounas, I.; Rodias, E.; Santos, C.H.; Pekkeriet, E. Agricultural Robotics for Field Operations. Sensors 2020, 20, 2676. [Google Scholar] [CrossRef]
- Bazazian, D.; Casas, J.R.; Ruiz-Hidalgo, J. Fast and Robust Edge Extraction in Unorganized Point Clouds. In Proceedings of the International Conference on Digital Image Computing: Techniques and Applications, Adelaide, Australia, 23–25 November 2015. [Google Scholar]
- Daniels, J.; Ochotta, T.; Ha, L.K.; Silva, C.T. Spline-based feature curves from point sampled geometry. Vis. Comput. 2008, 24, 449–462. [Google Scholar] [CrossRef]
- Oztireli, A.C.; Guennebaud, G.; Gross, M. Feature preserving point set surfaces based on non-linear kernel regression. Comput. Graph. Forum 2009, 28, 493–501. [Google Scholar] [CrossRef]
- Lin, Y.B.; Wang, C.; Cheng, J.; Chen, B.L.; Jia, F.K.; Chen, Z.G.; Li, J. Line segment extraction for large scale unorganized point clouds. ISPRS-J. Photogramm. Remote Sens. 2015, 102, 172–183. [Google Scholar]
- Wang, Y.T.; Feng, H.Y. Outlier detection for scanned point clouds using majority voting. Comput.-Aided Des. 2015, 62, 31–43. [Google Scholar] [CrossRef]
- Feng, C.; Taguchi, Y.; Kamat, V.R. Fast Plane Extraction in Organized Point Clouds Using Agglomerative Hierarchical Clustering. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Lu, W.; Zeng, M.J.; Wang, L.; Luo, H.; Mukherjee, S.; Huang, X.H.; Deng, Y.M. Navigation algorithm based on the boundary line of tillage soil combined with guided filtering and improved anti-noise morphology. Sensors 2019, 19, 3918. [Google Scholar] [CrossRef]
- Li, J.Q.; Zhou, W.N.; Zhang, Y.D.; Dong, W.; Zhang, X.D. A novel method of the Brillouin gain spectrum recognition using enhanced Sobel operators based on BOTDA system. IEEE Sens. J. 2019, 19, 4093–4097. [Google Scholar] [CrossRef]
- Zhou, R.G.; Yu, H.; Cheng, Y.; Li, F.X. Quantum image edge extraction based on improved Prewitt operator. Quantum Inf. Process. 2019, 18, 261. [Google Scholar] [CrossRef]
- Cao, J.F.; Chen, L.C.; Wang, M.; Tian, Y. Implementing a parallel image edge detection algorithm based on the Otsu-Canny operator on the hadoop platform. Comput. Intell. Neurosci. 2018, 3, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Q.Y.; Chen, W.; Hu, H.S.; Wu, X.F.; Xiao, C.X.; Song, X.Y. Multi-sensor based attitude prediction for agricultural vehicles. Comput. Electron. Agric. 2019, 156, 24–32. [Google Scholar] [CrossRef]
- Tong, C.H.; Gingras, D.; Larose, K.; Barfoot, T.D.; Dupuis, E. The Canadian planetary emulation terrain 3d mapping dataset. Int. J. Robot. Res. 2013, 32, 389–395. [Google Scholar] [CrossRef]
- Pire, T.; Mujica, M.; Civera, J.; Kofman, E. The Rosario dataset: Multisensor data for localization and mapping in agricultural environments. Int. J. Robot. Res. 2019, 38, 633–641. [Google Scholar] [CrossRef]
- Norouzi, M.; Miro, J.V.; Dissanayake, G. Planning stable and efficient paths for reconfigurable robots on uneven terrain. J. Intell. Robot. Syst. 2017, 87, 291–312. [Google Scholar] [CrossRef]
- Norouzi, M.; Miro, J.V.; Dissanayake, G. Probabilistic stable motion planning with stability uncertainty for articulated vehicles on challenging terrains. Auton. Robot. 2016, 40, 361–381. [Google Scholar] [CrossRef][Green Version]
- Zhu, Q.Y.; Wu, J.J.; Hu, H.S.; Xiao, Q.S.; Chen, W. LiDAR point cloud registration for sensing and reconstruction of unstructured terrain. Appl. Sci. 2018, 8, 2318. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Model | Physical Data | Main Parameters |
|---|---|---|---|
| LiDAR | Velodyne VLP-16 | 3D Point of terrain | Measurement range: 100 m. Accuracy: ±3 cm. Angular Resolution (Horizontal): 0.1°–0.4°. Angular Resolution (Vertical): 2.0°. |
| IMU (Inertial measurement unit) | Xsens MTi-700 | Euler angle | Latency: <2 m. Bias repeatability: 0.1°/s. Sampling frequency: 10KHz. |
| Encoder | E6B2-CWZ6C | Velocity | Accuracy: 1000 P/R; Maximum speed: 6000 r/min. Maximum response frequency: 100 KH. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Liu, Q.; Hu, H.; Liu, J.; Wang, S.; Zhu, Q. Novel Laser-Based Obstacle Detection for Autonomous Robots on Unstructured Terrain. Sensors 2020, 20, 5048. https://doi.org/10.3390/s20185048
Chen W, Liu Q, Hu H, Liu J, Wang S, Zhu Q. Novel Laser-Based Obstacle Detection for Autonomous Robots on Unstructured Terrain. Sensors. 2020; 20(18):5048. https://doi.org/10.3390/s20185048
Chicago/Turabian StyleChen, Wei, Qianjie Liu, Huosheng Hu, Jun Liu, Shaojie Wang, and Qingyuan Zhu. 2020. "Novel Laser-Based Obstacle Detection for Autonomous Robots on Unstructured Terrain" Sensors 20, no. 18: 5048. https://doi.org/10.3390/s20185048
APA StyleChen, W., Liu, Q., Hu, H., Liu, J., Wang, S., & Zhu, Q. (2020). Novel Laser-Based Obstacle Detection for Autonomous Robots on Unstructured Terrain. Sensors, 20(18), 5048. https://doi.org/10.3390/s20185048