High-Resolution ISAR Imaging with Modified Joint Range Spatial-Variant Autofocus and Azimuth Scaling



Abstract
1. Introduction
2. Signal Model and Related Work
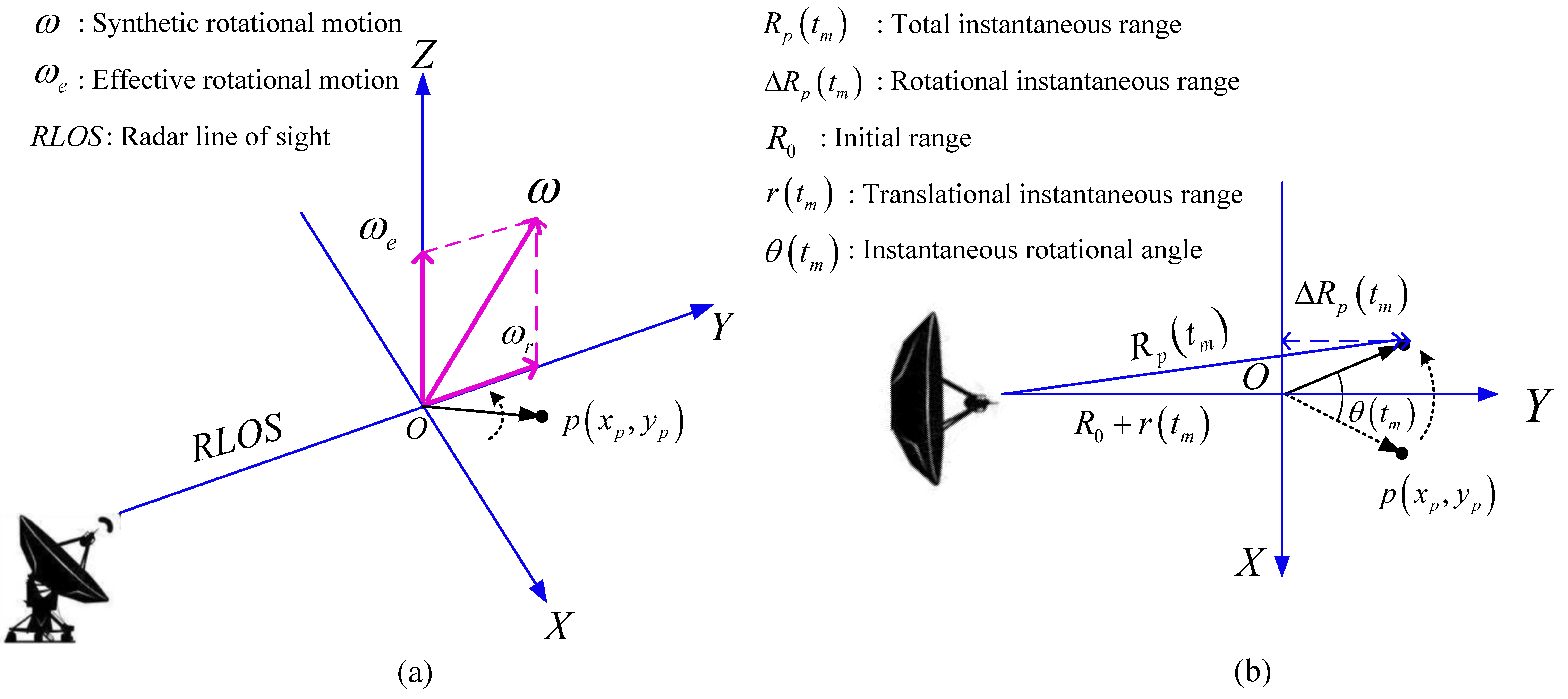
2.1. Signal Model
2.2. Related Work
2.2.1. Range Alignment
2.2.2. Phase Adjustment
2.2.3. Azimuth Scaling
2.3. JERCP-ERV Signal Model
3. The Proposed Methodology
3.1. The Establishment of Objective Function
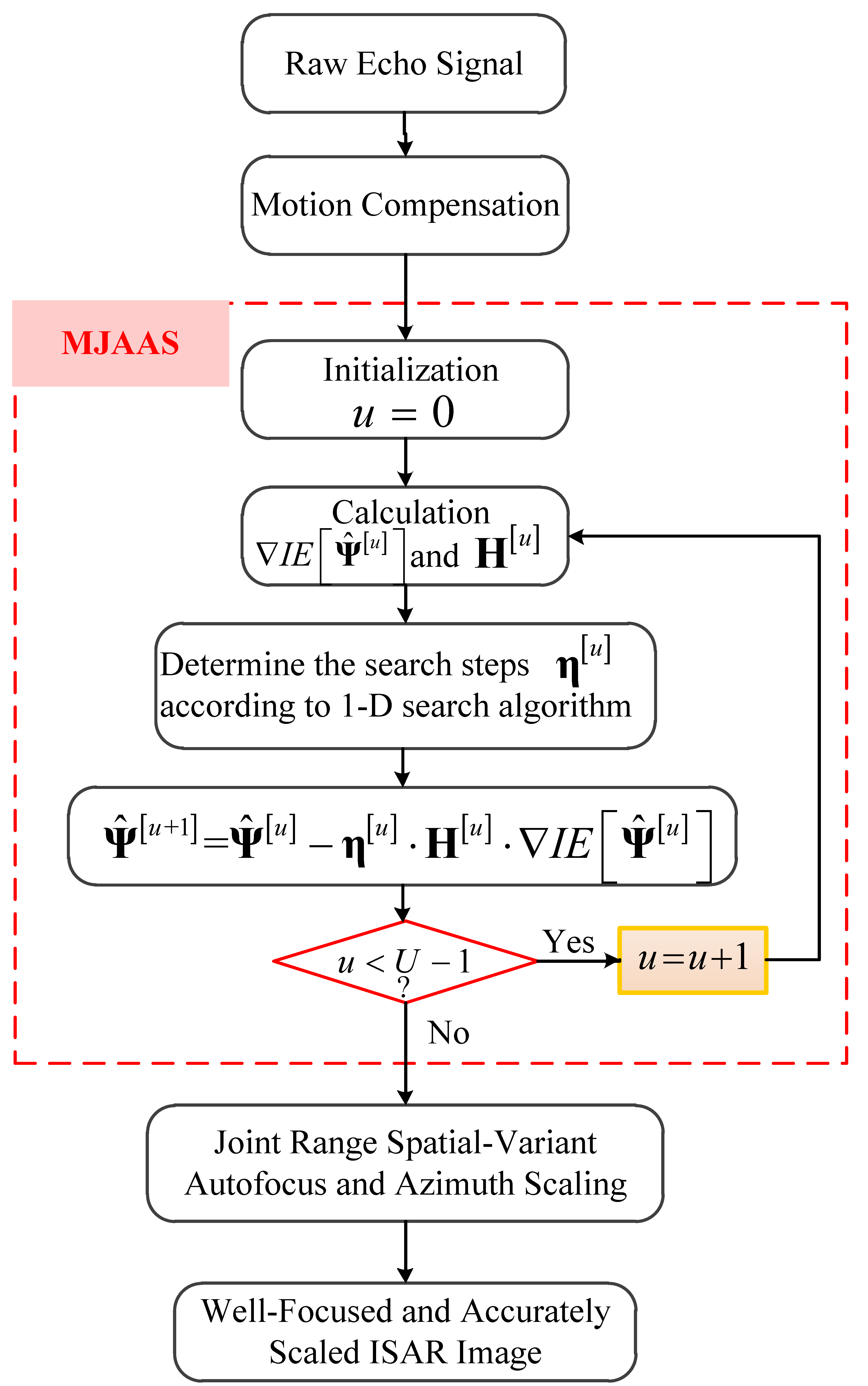
3.2. Optimal Parameters Estimation
4. Experiments and Analyses
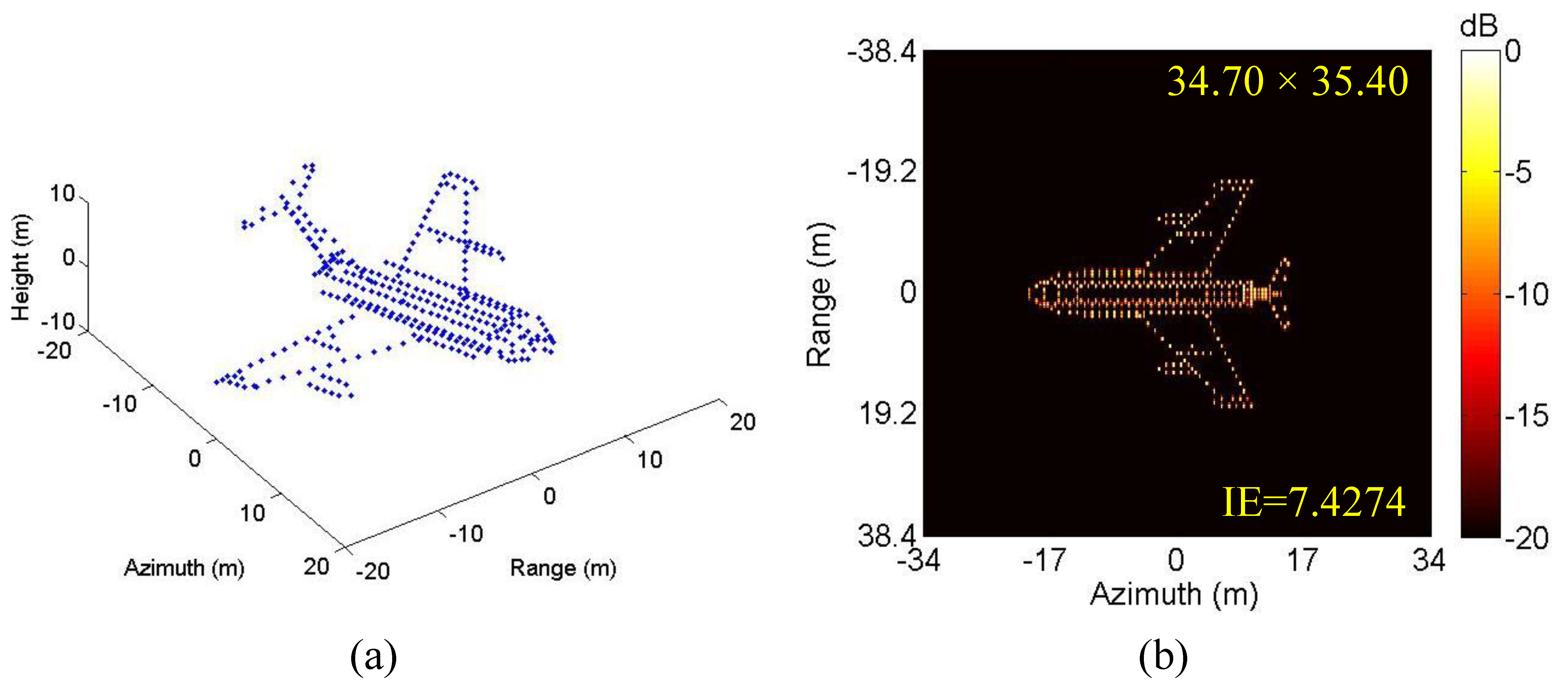
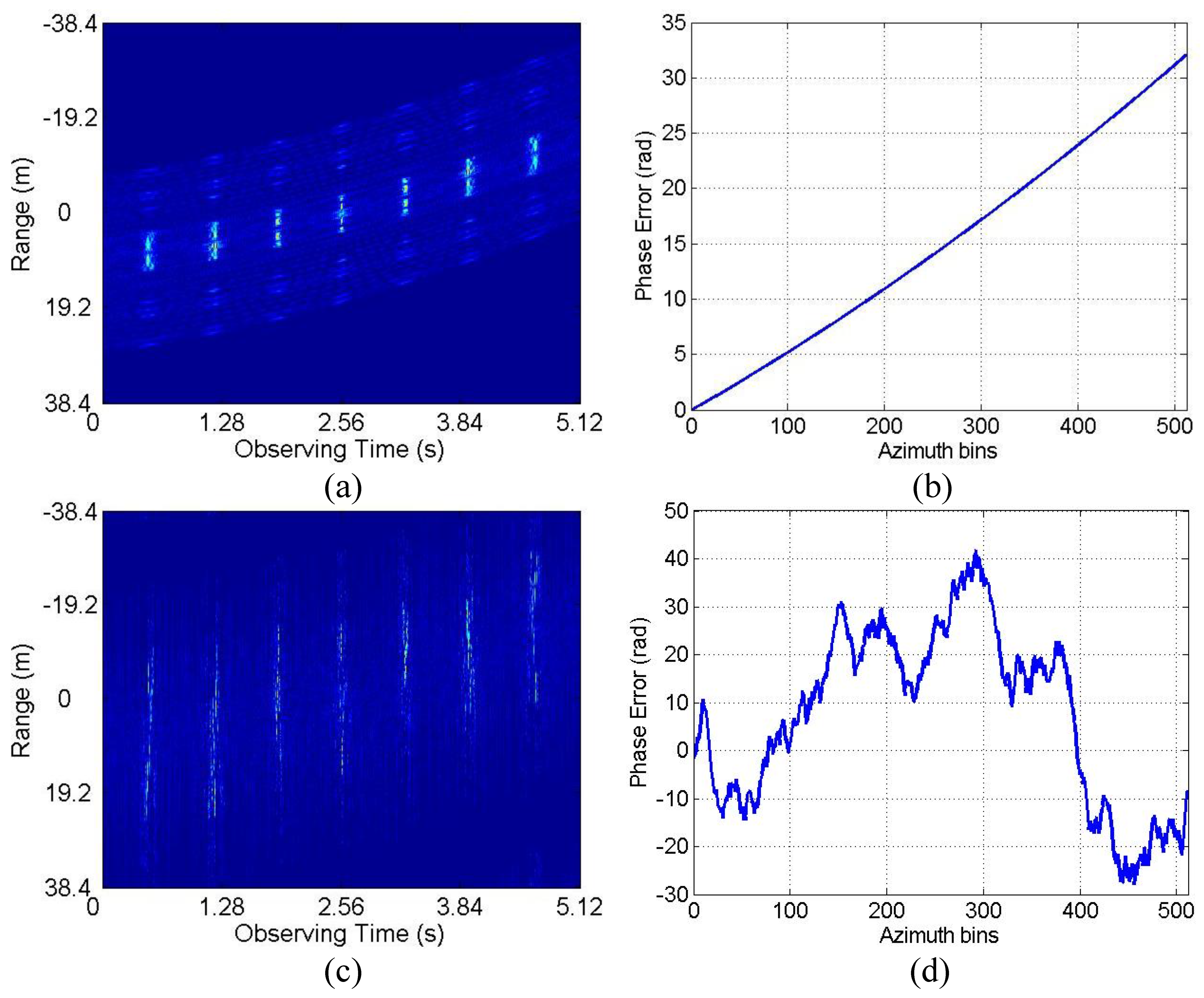
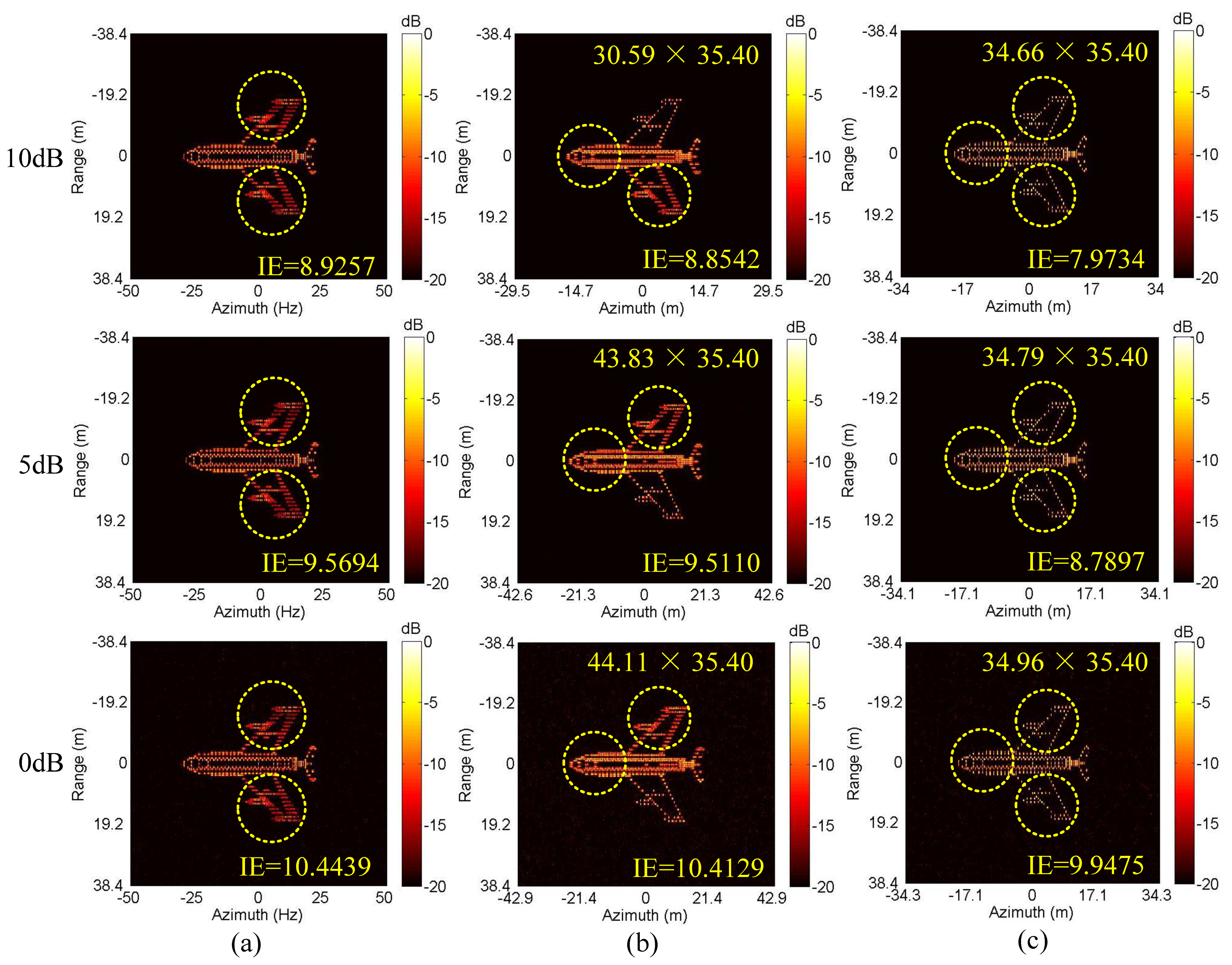
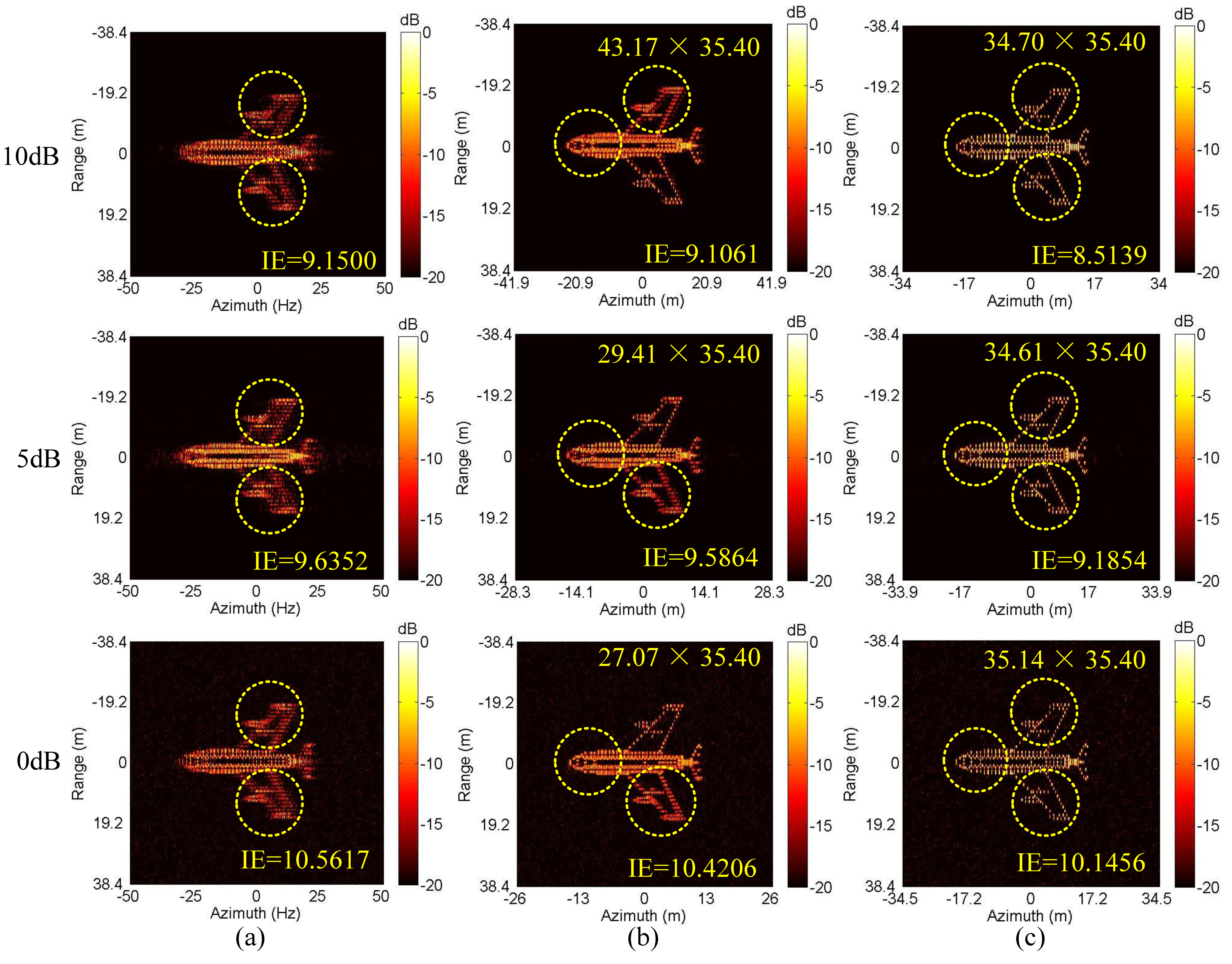
4.1. Simulated Data Experiments
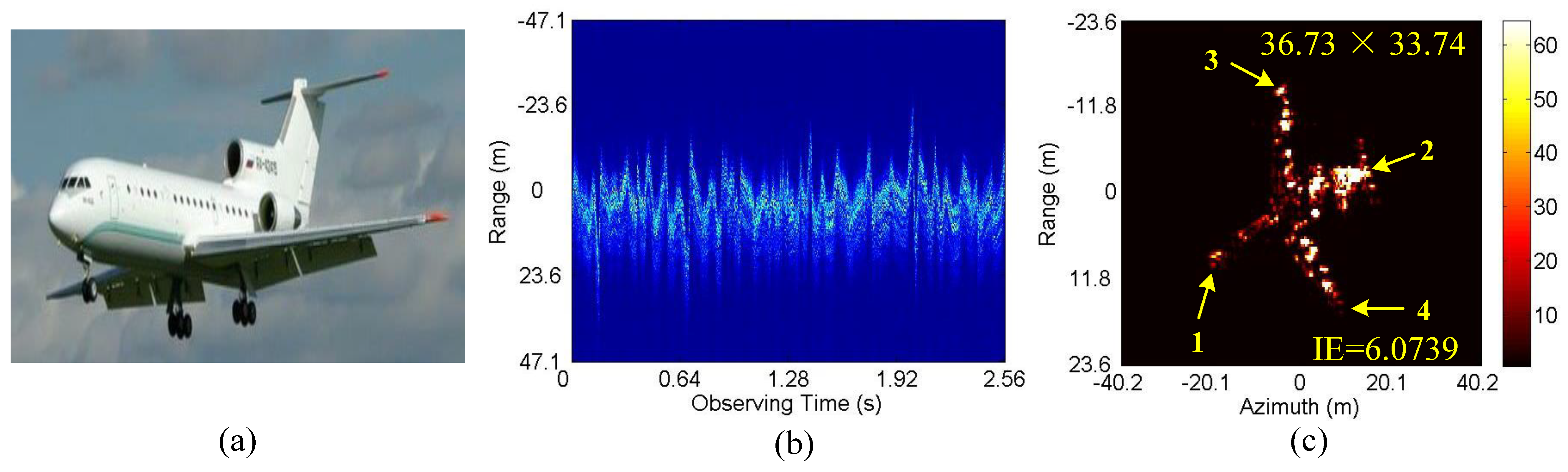
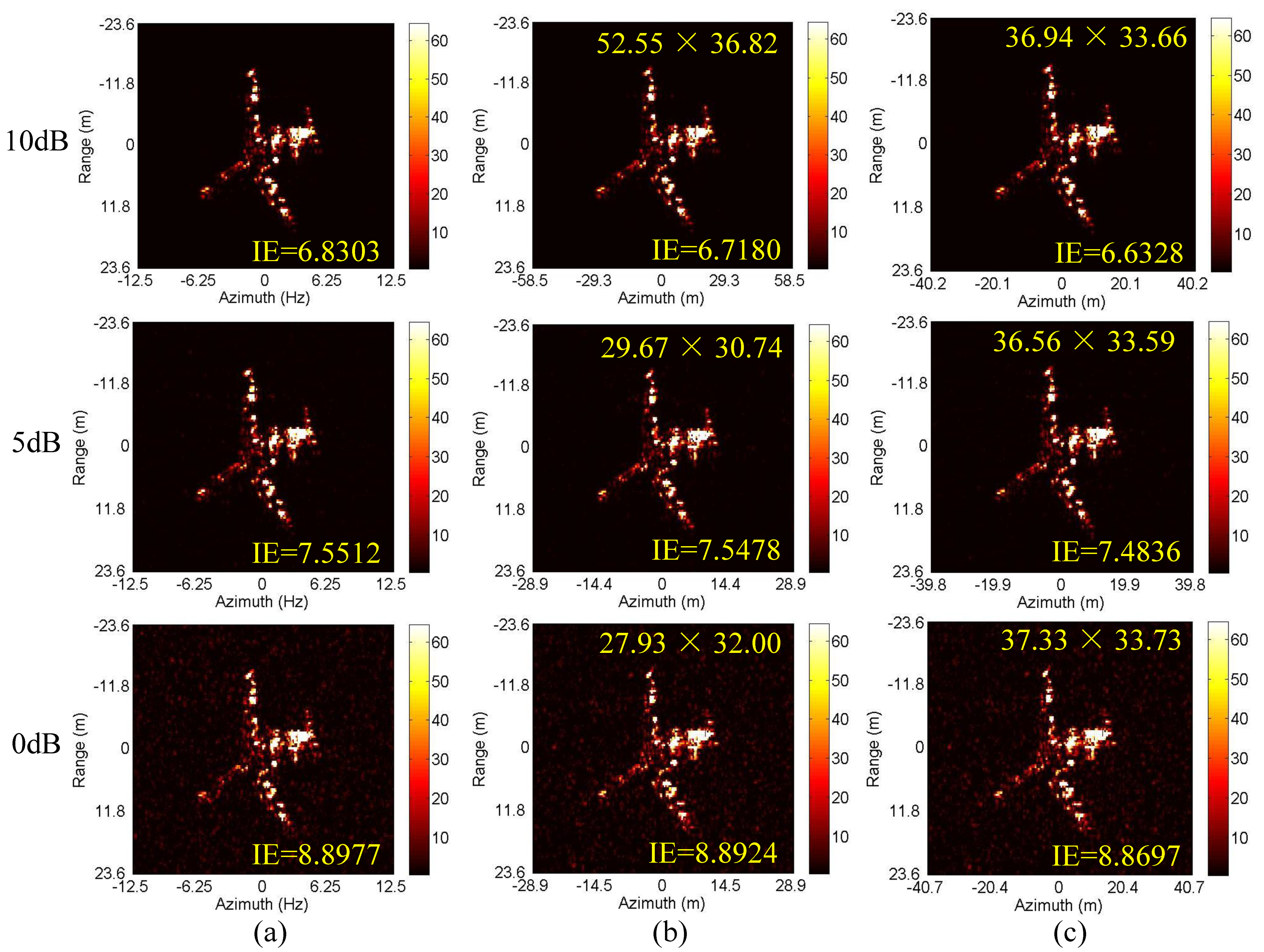
4.2. Real Data Experiments
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Wang, Y.; Ling, H.; Chen, V.C. ISAR motion compensation via adaptive joint time-frequency technique. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 670–677. [Google Scholar] [CrossRef]
- Ouahabi, C.; Depollier, L.S.; Koume, D. Spectrum estimation from randomly sampled velocity data [LDV]. IEEE Trans. Instrum. Meas. 1998, 47, 1005–1012. [Google Scholar] [CrossRef]
- Berizzi, E.D.; Mese, M.D.; Martorella, M. High-resolution ISAR imaging of maneuvering targets by means of the range instantaneous Doppler technique: Modeling and performance analysis. IEEE Trans. Image Process. 2001, 10, 1880–1890. [Google Scholar] [CrossRef] [PubMed]
- Wu, K.; Xu, X. Two-Dimensional Augmented State–Space Approach with Applications to Sparse Representation of Radar Signatures. Sensors 2019, 19, 4631. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Q.; Deng, B.; Qin, Y.; Wang, H. Experimental research on interferometric inverse synthetic aperture radar imaging with multi-channel terahertz radar system. Sensors 2019, 19, 2330. [Google Scholar] [CrossRef]
- Pan, Z.; Fan, H.; Zhang, Z. Nonuniformly-Rotating Ship Refocusing in SAR Imagery Based on the Bilinear Extended Fractional Fourier Transform. Sensors 2020, 20, 550. [Google Scholar] [CrossRef]
- Jack, L. WALKER Range-Doppler imaging of rotating objects. IEEE Trans. Aerosp. Electron. Syst. 1980, 11, 23–52. [Google Scholar]
- Delisle, G.Y.; Wu, H. Moving target imaging and trajectory computation using ISAR. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 887–899. [Google Scholar] [CrossRef]
- Pastina, D.; Spina, C. Slope-based frame selection and scaling technique for ship ISAR imaging. IET Signal Process. 2008, 2, 265–276. [Google Scholar] [CrossRef]
- Xu, G.; Xing, M.; Zhang, L.; Duan, J.; Chen, Q.Q.; Bao, Z. Sparse Apertures ISAR Imaging and Scaling for Maneuvering Targets. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 2942–2956. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, Y.; Xing, L.X. Minimum entropy based ISAR motion compensation with low SNR. In Proceedings of the IEEE China Summit and Int. Conf. on Signal and Information Processing, Beijing, China, 10 October 2013; pp. 593–596. [Google Scholar]
- Zhu, D.; Wang, L.; Yu, Y.; Tao, Q.; Zhu, Z. Robust ISAR range alignment via minimizing the entropy of the average range profile. IEEE Geosci. Remote Sens. Lett. 2009, 6, 204–208. [Google Scholar]
- Ye, W.; Yeo, T.S.; Bao, Z. Weighted least square estimation of phase errors for SAR/ISAR autofocus. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2487–2494. [Google Scholar] [CrossRef]
- Huang, Y.B.; Zheng, Y.M.; Bao, Z. The SAR/ISAR autofocus based on the multiple dominant scatterers synthesis. J. Xidian Univ. 2001, 28, 105–110. [Google Scholar]
- Nel, W.; Giusti, E.; Martorella, M.; Abdul Gaffar, M.Y. A time domain phase-gradient based ISAR autofocus algorithm. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011; pp. 541–544. [Google Scholar] [CrossRef]
- Fu, T.; Gao, M.; He, Y. An improved scatter selection method for phase gradient autofocus algorithm in SAR/ISAR autofocus. In Proceedings of the IEEE Int. Conf. Neural Networks and Signal Processing, Nanjing, China, 5 April 2003; Volume 2, pp. 1054–1057. [Google Scholar]
- González-Partida, J.; Almorox-González, P.; Burgos-Garcia, M.; Dorta-Naranjo, B. SAR System for UAV Operation with Motion Error Compensation beyond the Resolution Cell. Sensors 2008, 8, 3384–3405. [Google Scholar] [CrossRef]
- Kang, M.S.; Bae, J.H.; Lee, S.H.; Kim, K.T. Efficient ISAR autofocus via minimization of Tsallis entropy. IEEE Trans. Aerosp. Electron. Syst. 2017, 52, 2950–2960. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, Y.; Li, X. Autofocusing for sparse aperture ISAR imaging based on joint constraint of sparsity and minimum entropy. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2017, 10, 998–1011. [Google Scholar] [CrossRef]
- Shao, S.; Zhang, L.; Liu, H.; Zhou, Y. Accelerated translational motion compensation with contrast maximisation optimisation algorithm for inverse synthetic aperture radar imaging. IET Radar Sonar Navig. 2019, 13, 316–325. [Google Scholar] [CrossRef]
- Zhang, Z.Q.; Xing, M.; Sheng, J.; Guo, R.; Bao, Z. High-Resolution ISAR Imaging by Exploiting Sparse Apertures. IEEE Trans. Antennas Propag. 2012, 60, 997–1008. [Google Scholar] [CrossRef]
- Gao, Y.; Gui, G.; Cong, X.; Yang, Y.; Zou, Y.; Wan, Q. Multi-linear sparse reconstruction for SAR imaging based on higher-order SVD. EURASIP J. Adv. Signal Process. 2017, 2017, 1–11. [Google Scholar] [CrossRef]
- Semeter, J.; Mendillo, M. A nonlinear optimization technique for ground-based atmospheric emission tomography. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1105–1116. [Google Scholar] [CrossRef]
- Xing, M.; Wu, R.; Lan, J.; Bao, Z. Migration Through Resolution Cell Compensation in ISAR Imaging. IEEE Geosci. Remote Sens. Lett. 2004, 1, 141–144. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Willsky, A.S. Signals and Systems, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Mao, X.J.; Wang, J.F.; Liu, X.Z. ISAR minimum-entropy phase adjustment based on gradient descent algorithm. Mod. Rad. 2008, 30, 40–43. [Google Scholar]
- Shao, S.; Zhang, L.; Liu, H.; Zhou, Y. Spatial-variant contrast maximization auto focus algorithm for ISAR imaging of maneuvering targets. Sci. China Inf. Sci. 2019, 62, 37–39. [Google Scholar] [CrossRef]
- Ran, L.; Liu, Z.; Zhang, L.; Li, T.; Xie, R. An autofocus algorithm for estimating residual trajectory deviations in synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3408–3425. [Google Scholar] [CrossRef]
- Chen, Y.C.; Li, G.; Zhang, Q.; Zhang, Q.J.; Xia, X.G. Motion compensation for airborne SAR via parametric sparse representation. IEEE Trans. Geosci. Remote Sens. 2017, 55, 551–562. [Google Scholar] [CrossRef]
- Athanasios, V.; Nikolaos, D.; Anastasios, D.; Eftychios, P. Deep Learning for Computer Vision: A Brief Review. Comput. Intell. Neurosci. 2018, 2018, 1–13. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accuracy | Robustness | Computational Complexity | Affected by ERCP | Application Range | |
|---|---|---|---|---|---|
| TTM | relatively low | relatively strong | low | no | relatively wide |
| SBM | relatively high | relatively low | relatively low | no | relatively narrow |
| ACREM | high | relatively low | relatively high | yes | relatively wide |
| MJAAS | high | strong | relatively high | no | wide |
| Parameters | Values |
|---|---|
| Carrier frequency | 5.52 GHz |
| Bandwidth | 500 MHz |
| Pulse repetition frequency | 100 Hz |
| Pulse duration | 20 μs |
| Sampling frequency | 12.8 MHz |
| ERV () | 0.04 |
| Range bin number | 256 |
| Azimuth bin number | 512 |
| Real Value | 10 dB | 5 dB | 0 dB | |
|---|---|---|---|---|
| TAS | 0.04 | 0.0462 | 0.0320 | 0.0318 |
| MJAAS | 0.04 | 0.04 | 0.0399 | 0.0397 |
| Real Value | 10 dB | 5 dB | 0 dB | |
|---|---|---|---|---|
| TAS | 0.04 | 0.0325 | 0.0481 | 0.0524 |
| MJAAS | 0.04 | 0.04 | 0.0401 | 0.0395 |
| Real Value | 10 dB | 5 dB | 0 dB | |
|---|---|---|---|---|
| TAS | 0.0085 | 0.0058 | 0.0119 | 0.0118 |
| MJAAS | 0.0085 | 0.0085 | 0.0086 | 0.0084 |
| Real Value | 10 dB | 5 dB | 0 dB | |
|---|---|---|---|---|
| TAS | 0.0339 | 0.0263 | 0.0287 | 0.0364 |
| MJAAS | 0.0339 | 0.0339 | 0.0339 | 0.0337 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, J.; Shao, S.; Ma, H.; Wang, P.; Zhang, L.; Liu, H. High-Resolution ISAR Imaging with Modified Joint Range Spatial-Variant Autofocus and Azimuth Scaling. Sensors 2020, 20, 5047. https://doi.org/10.3390/s20185047
Wei J, Shao S, Ma H, Wang P, Zhang L, Liu H. High-Resolution ISAR Imaging with Modified Joint Range Spatial-Variant Autofocus and Azimuth Scaling. Sensors. 2020; 20(18):5047. https://doi.org/10.3390/s20185047
Chicago/Turabian StyleWei, Jiaqi, Shuai Shao, Hui Ma, Penghui Wang, Lei Zhang, and Hongwei Liu. 2020. "High-Resolution ISAR Imaging with Modified Joint Range Spatial-Variant Autofocus and Azimuth Scaling" Sensors 20, no. 18: 5047. https://doi.org/10.3390/s20185047
APA StyleWei, J., Shao, S., Ma, H., Wang, P., Zhang, L., & Liu, H. (2020). High-Resolution ISAR Imaging with Modified Joint Range Spatial-Variant Autofocus and Azimuth Scaling. Sensors, 20(18), 5047. https://doi.org/10.3390/s20185047