1. Introduction
Data acquisition from an array sensor is a kind of spatial signal sampling which needs to satisfy the Shannon–Nyquist sampling theorem. Uniform linear arrays (ULA) with equal intervals are therefore used in many practical applications. Meanwhile, DOA estimation is an important branch of array signal processing and has a wide range of applications [
1,
2,
3]. In order to achieve higher resolution and antinoise capability, several array elements are needed to achieve a larger aperture. This will not only increase the cost of the sensor but also degrade the array performance due to the mutual coupling effect of the array elements.
To solve these problems, according to the nonuniform sampling theory [
4], small, elaborately arranged nonuniform arrays can be used to achieve similar performance to a large uniform array. Sparse array synthesis, therefore, has become an important research direction and has attracted the attention of many researchers. Some computer-based intelligent optimization methods are suitable for solving these problems, including the genetic algorithm [
5], differential evolution algorithm [
6], particle swarm optimization [
7], etc. These algorithms are solved iteratively, and the calculation cost is large. The coprime array configurations for DOA estimation are analyzed in [
8,
9]; these research works are concerned with the degree of freedom in DOA estimation. In [
10,
11], a matrix pencil method (MPM) is proposed to reduce the number of sensors in linear arrays, and the used algorithms show better performance in terms of convergence speed and accuracy. In [
12], a cognitive radar antenna selection method based on deep learning is presented. The authors construct a deep neural network with convolutional layer as a multiclass classification framework. This method is effective in one-dimensional scenarios, but its performance degrades for two-dimensional cases.
In the past decade, the sparse signal sampling technique of compressed sensing (CS) is presented in [
13]. This relaxes the limitation of the Shannon sampling theorem when the original signal is sparse and allows us to reconstruct the sparse signal with fewer measurements [
14]. In [
15], the authors propose a method that equates the beam-forming problem of the array antenna to the optimization problem of solving the sparse signal vector, using the FOCUSS algorithm to quickly and accurately obtain an array with the maximum sparsity, element position and excitation amplitude.
The problem studied in this paper is that, in a target tracking scenario, the prediction of target position is used a priori to select the elements of a large-scale array and obtain a sparse subarray with similar performance to the original array. This is similar to the sparse array synthesis mentioned above, but the difference is that we consider the sparse array synthesis from the perspective of the application of target tracking.
Target tracking is a dynamic process. At each moment, the echo from the target is obtained through a sparse array, the bearing information of the target is estimated through a DOA estimation algorithm and the estimation and prediction of the target position and velocity are calculated by a target filter. In this process, we can use the a priori prediction of the target orientation to obtain a sparse subarray that changes with time. In order to realize the changing of the subarray, in this paper, the sparse subarray consists of the elements in a large-scale array; thus, “subarray selection” is the focus of this paper.
In addition, the aim of this paper is not simply to optimize array performance but to optimize the overall target tracking performance. Specifically, this means that the error of DOA estimates by using the sparse subarray is similar to by the original larger array. This contrasts with the performance index of traditional array synthesis. The algorithm for DOA estimation, therefore, needs to be determined first. Some classical super-resolution algorithms—e.g., MUSIC [
16] and ESPRIT [
17] —need multisnapshots for subspace decomposition, and their performances may degrade when the echoes of targets are correlated. There are also some deep learning-based algorithms: A stacked autoencoder-based method is introduced in [
18]; A DOA estimation algorithm based on deep neural network is proposed in [
19]; A deep learning based scheme for achieving super-resolution DOA estimation and channel estimation in the massive multiple-input multiple-output system is presented in [
20]. These methods need a large number of samples for training neural network.
In contrast to the above algorithms, compressed sensing-based DOA estimation (CS-DOA) algorithms only use a single snapshot, and there is no correlation problem of the echoes of targets; we therefore adopt CS-DOA algorithms in this paper [
21,
22,
23]. Since some CS-DOA algorithms require the columns of the sensing matrix (flow pattern matrix) to be unified, the excitation of each element in the sparse subarray is designed to be the same in this paper. Moreover, the performance of the compressed sensing reconstruction algorithms mainly depends on the column coherence of the sensing matrix. The column coherence, therefore, is an important index for sparse subarray selection [
24,
25].
The specific idea of this paper is to use the target position prediction provided by the target filter a priori to select the subarray. In practical applications, especially in air traffic control, radar target tracking, etc. [
26,
27], the a priori target position is easily obtained. The prediction of the targets shows where the targets are most and least likely to appear. We should naturally pay increased attention to the area with the highest probability of appearance when sensor resources are limited. In order to reflect this difference in attention, we add a series of weights to each direction of the surveillance area according to the prior probability of the target position to obtain a weighted sensing matrix.
Similar to the method in [
10,
11], we perform singular value decomposition (SVD) on the weighted sensing matrix to obtain a low-rank approximation matrix [
28]. We then find the best matching combination of the rows in the original sensing matrix according to the feature space consisting of the right singular vector of the low-rank matrix. The array elements corresponding to these rows are the sparse subarray that we need.
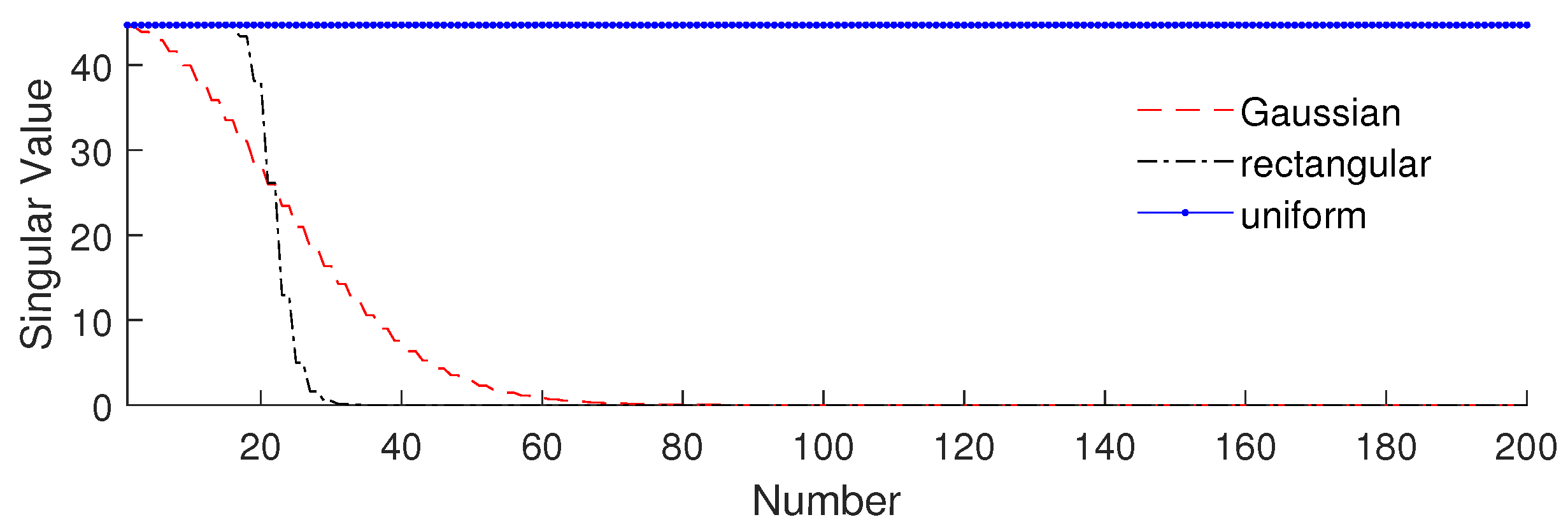
Since different weights bring different results, in the above method, we need to determine the weight added to the sensing matrix. Considering that the a priori target positions obtained by the target filter usually have the form of a Gaussian function, a direct idea is to apply it directly on the sensing matrix as the weight. Therefore, after analyzing and comparing the influence of the Gaussian weight and rectangular weight on the eigenvalue of the weighted sensing matrix and the subarray selection algorithm, we propose a type of weight to achieve the purpose of performance balance.
The main contributions of this paper are as follows. Firstly, by analyzing the influence of different weights on the eigenvalue of the weighted sensing matrix, we present a method for generating a performance-balanced weight, which makes the proposed algorithm more applicable to the case where the a priori target position includes deviation. Secondly, according the low-rank matrix approximating theory, we find the optimal approximate matrix of the weighted sensing matrix and analyze the rank of the optimal approximated matrix on different conditions, such as width of the weight and total element number of the original array. Thirdly, we propose a subarray selection algorithm by utilizing the correct singular vectors as the features to find required elements in the original array; the simulation results show the effectiveness of the proposed algorithm.
The paper is organized as follows.
Section 2 introduces the discrete model of the CS-based single snapshot DOA estimation and the influence of column coherence in DOA estimation. In
Section 3, we analyze the effect of different weights on the singular values of the weighted sensing matrix though the SVD method and present an analysis of the rank of the low-rank approximate matrix of the weighted sensing matrix. The proposed subarray selection algorithm is listed in
Section 4, and the numerical simulations are given in
Section 5. Finally, the paper is summarized in
Section 6.
5. Numerical Simulation
In this section, a number of numerical simulations are carried out in different conditions to illustrate the effectiveness of the presented method by comparing it with the FOCUSS and MPM methods. It is known that the MPM method calculates the position of array elements based on the generalized eigenvalue method, and the alternate array element position cannot be specified before calculation. The MPM method is not actually suitable for the work in this paper; therefore, the simulation below only lists the results of this method for comparison with the other methods without further analysis.
In these simulations, the signal sources are from two separated far-field moving targets. The surveillance area from to is divided into 2000 angle bins according to an equal sine difference. Each signal with its amplitude of 1 is received by the array sensors. The demanded number of subarray elements is given by .
In order to achieve a fair comparison of different arrays, the noise of each array element is employed, which is complex Gaussian white noise. Both real and imaginary parts of the noise obey the Gaussian distribution given by
. The DOAs are then estimated by the modified orthogonal matching pursuit (m-OMP) algorithm which employs the expectation maximization (EM) method to eliminate the interaction between DOAs [
35].
The error of DOA estimation is usually measured by the difference between the true value and the estimated value, which is sufficient for the single-DOA case but not for the multi-DOA case. Meanwhile, the compressed sensing algorithm may cause additional outliers when the noise level is greater than
, determined by the side-lobe level. Consequently, we need a metric which is able to measure both the angle error and the number error simultaneously. Therefore, the “optimal subpattern assignment” (OSPA) method proposed in [
36] is adopted to measure the DOA estimation error in this paper. It is assumed that
denotes the true DOAs and
denotes the estimated DOAs. When
, the definition of the OSPA distance is given by
where
p is the order of the OSPA distance,
c is the cut-off parameter,
denotes all the combinations of
, and
If
, it has
.
There is a simple explanation of the OSPA metric. The right side of Equation (
26) includes two parts: the first item represents the estimation error of the angle, and the maximum angle error of each target is limited by
c; the second item denotes the error in the estimated number of targets, whose value is equal to
. The parameters of
c are suggested to be an upper bound of error, and here we give
and
.
5.1. Comparison of Runtime
The methods we proposed are compared with the FOCUSS method proposed in [
15] and the MPM method proposed in [
10]. Due the fact that the FOCUSS and the MPM methods are simply array synthesis methods, it is necessary to give them an object pattern. According to the
Section 2.2, we use the coherence curve of a weighted sensing matrix with a rectangular weight as the object pattern.
The runtime of each method under different conditions is given in
Table 1 and
Table 2, which are the average of 100 trials. The simulation environment is as follows: Matlab R2019b, Windows 10 64 bit, Intel Core i5-9400f CPU 2.90 GHz, RAM 16.00 GB.
It is worth noting that the effective widths of the different types of weight are not the same even if they are according to the same prior distribution. The effective width is defined as the size of the parts which have . For instance, if the prior distribution is given by , the effective widths of the narrow rectangular weight, wide rectangular weight, Gaussian weight and mixed weight are 101, 201, 371 and 385, respectively.
It is found that our proposed methods and the MPM method are all based on the SVD technique, which requires a large amount of computing time. Meanwhile, the computing time increases with the effective width and the number of alternative elements. Moreover, due to the FOCUSS method being an iterative algorithm, its computing time is greater than the others.
5.2. Simulation 1
Simulation 1 is carried out to analyze the influence of different weights on the subarray selection and the performance of DOA estimation. The original array is a ULA with elements assigned along the x-axis with an interval of half a wavelength. The number of used elements in array is fixed at while the width of weights is variant. The prior PDFs of two DOAs are given by the normal distributions denoted by and , respectively, and the true positions of these DOAs are also generated by the above PDFs; i.e., the prior information is reliable. The rectangular, Gaussian and mixed weights are generated according to the methods mentioned in the above section, and the corresponding subarrays are then obtained.
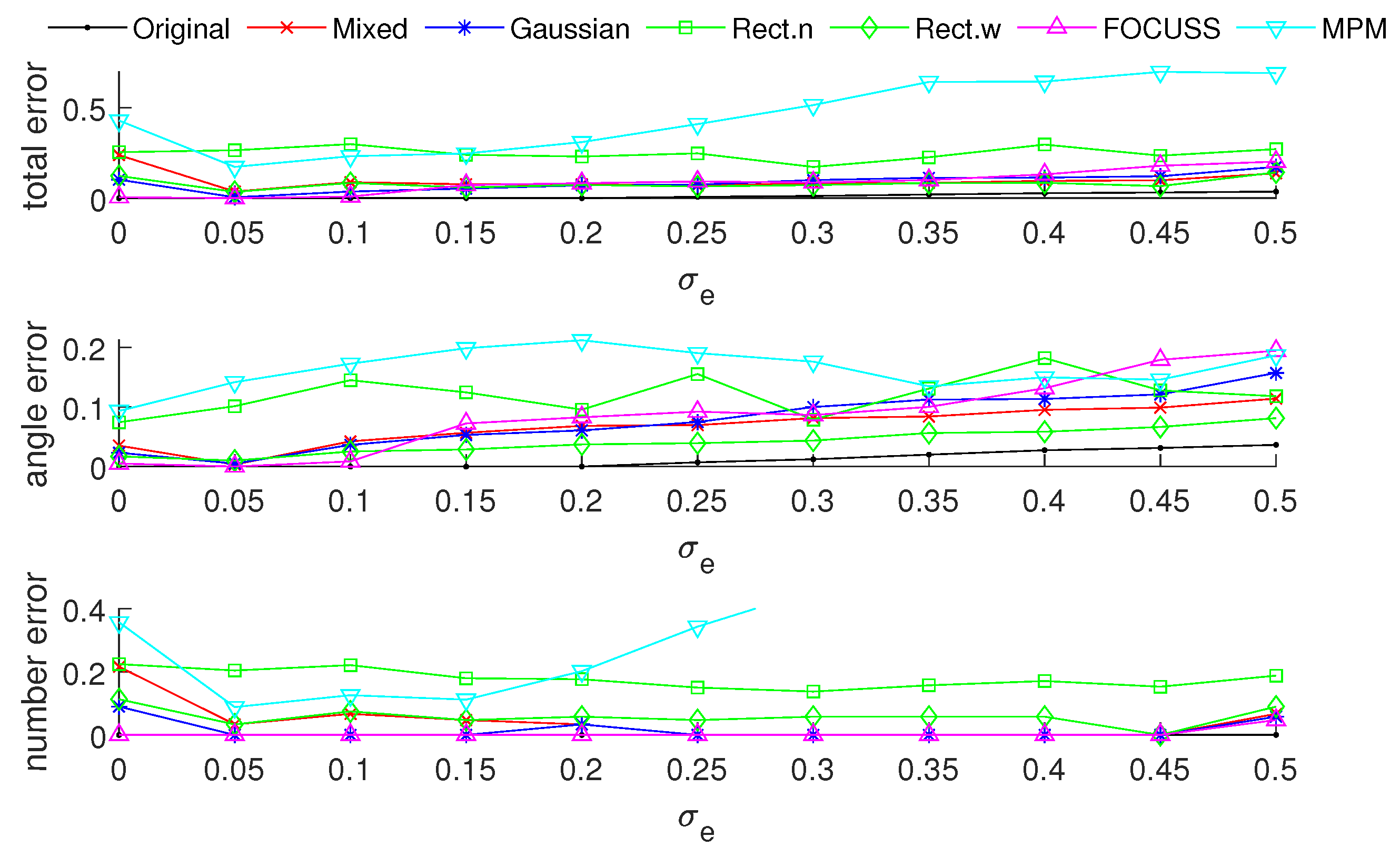
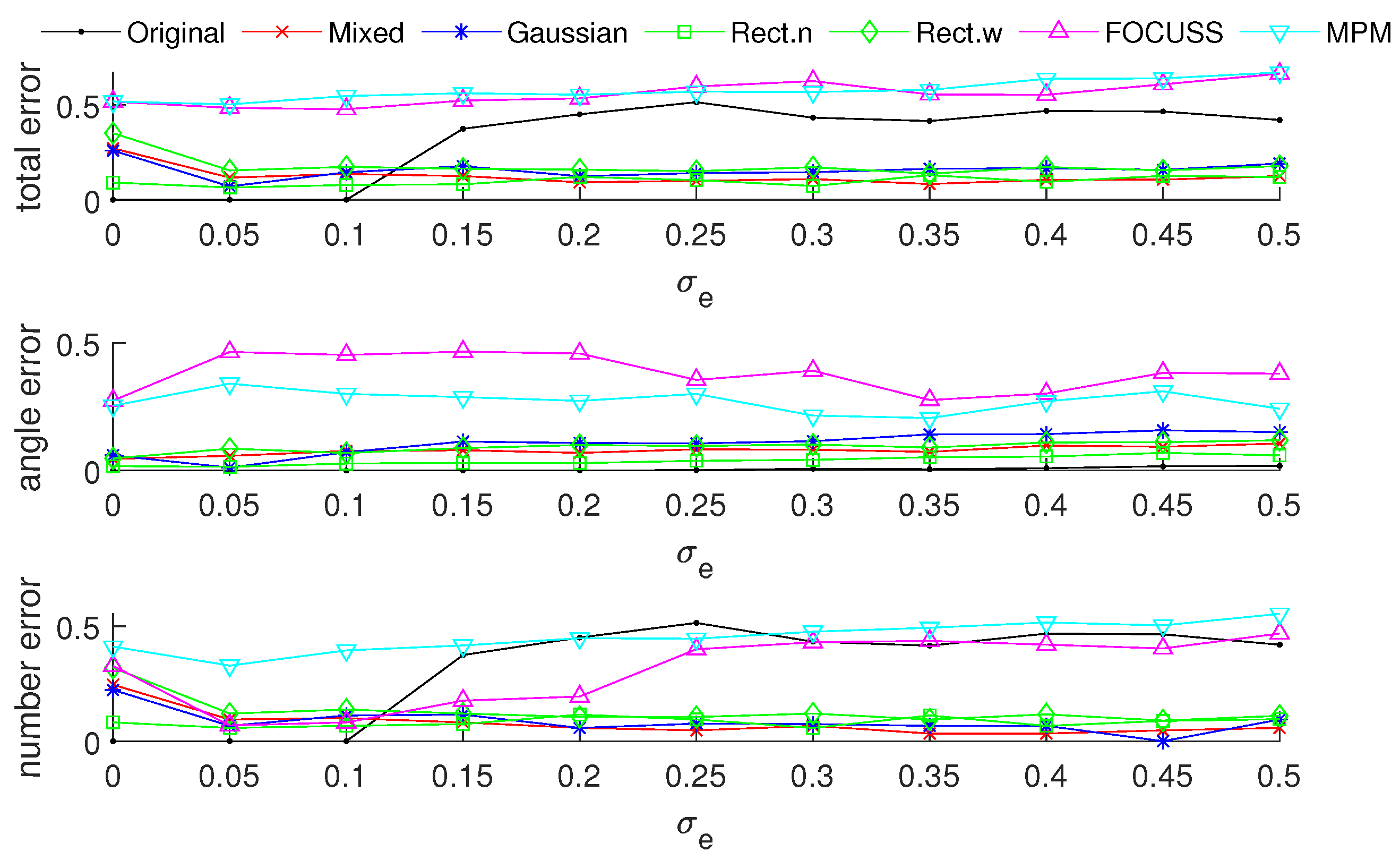
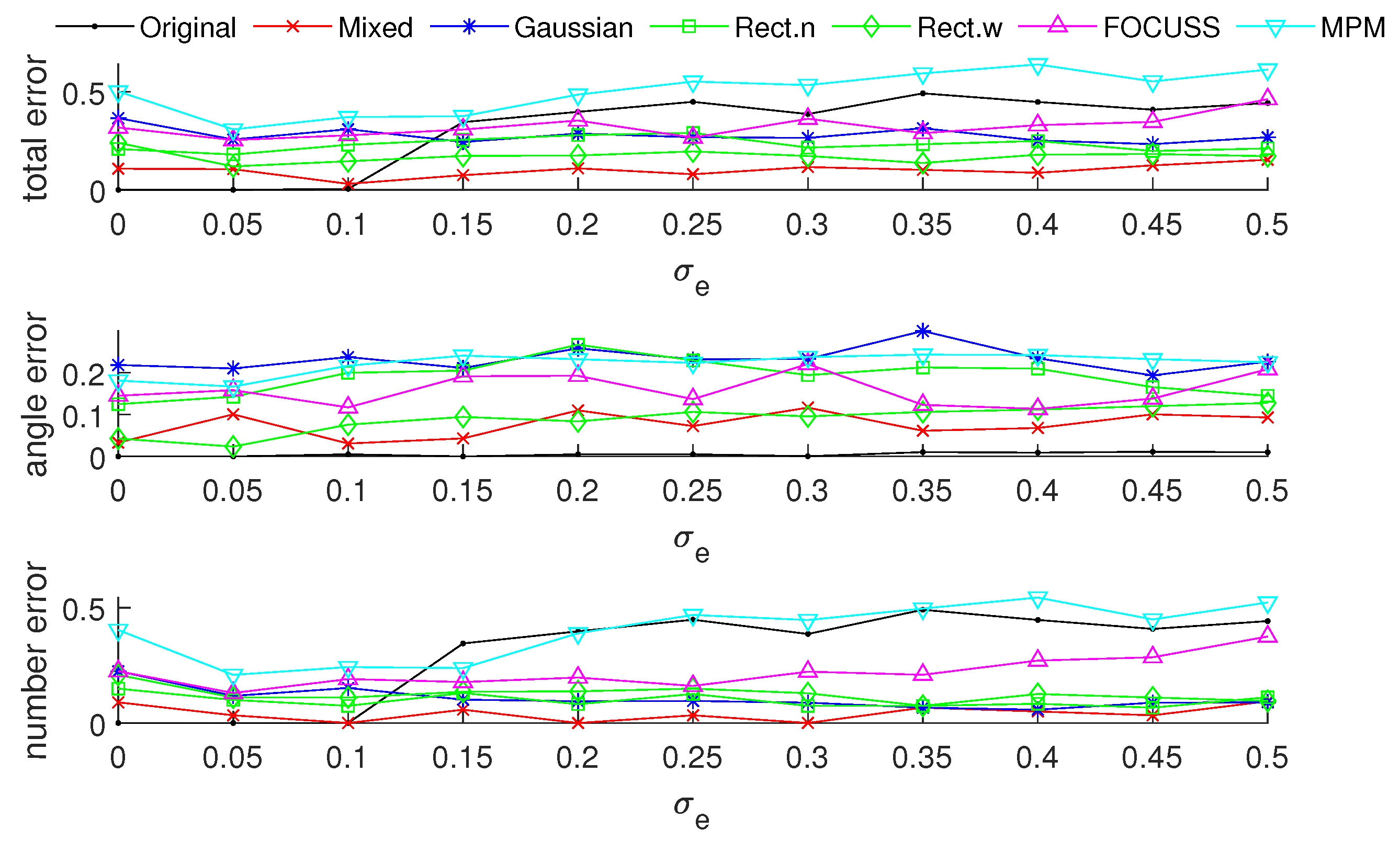
Figure 3 and
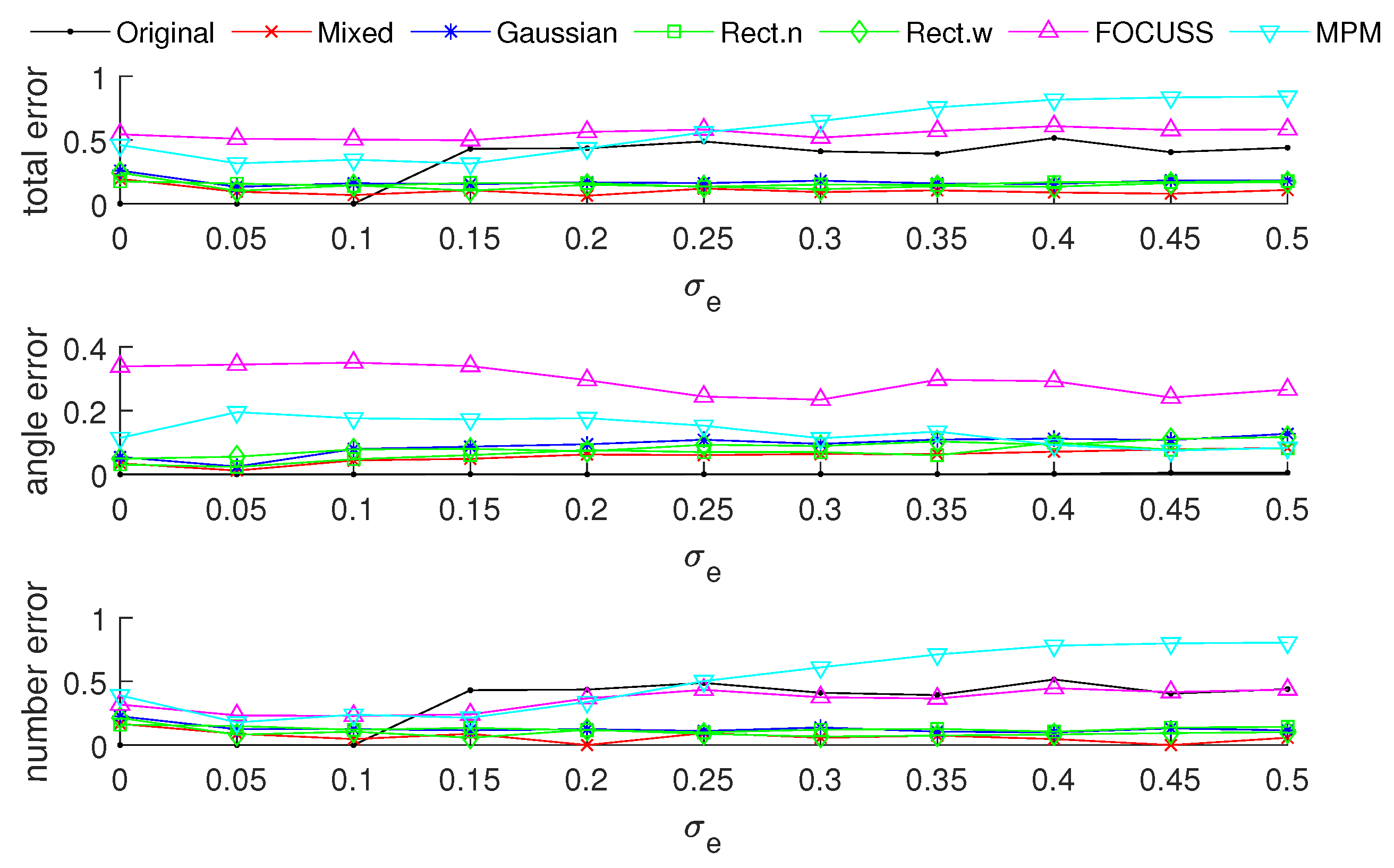
Figure 4 show the DOA estimation error in terms of the OSPA distance via different arrays when the standard deviations of the prior PDFs are given by
and
. The x-axis is the standard deviation of noise on each array element, and the y-axis is the DOA estimation error. The upper subfigure is the total error in terms of the OSPA distance, and the middle and lower subfigures correspond to the angle error and number error, respectively. All the results are the root mean squared error (RMSE) of 100 Monte-Carlo trials.
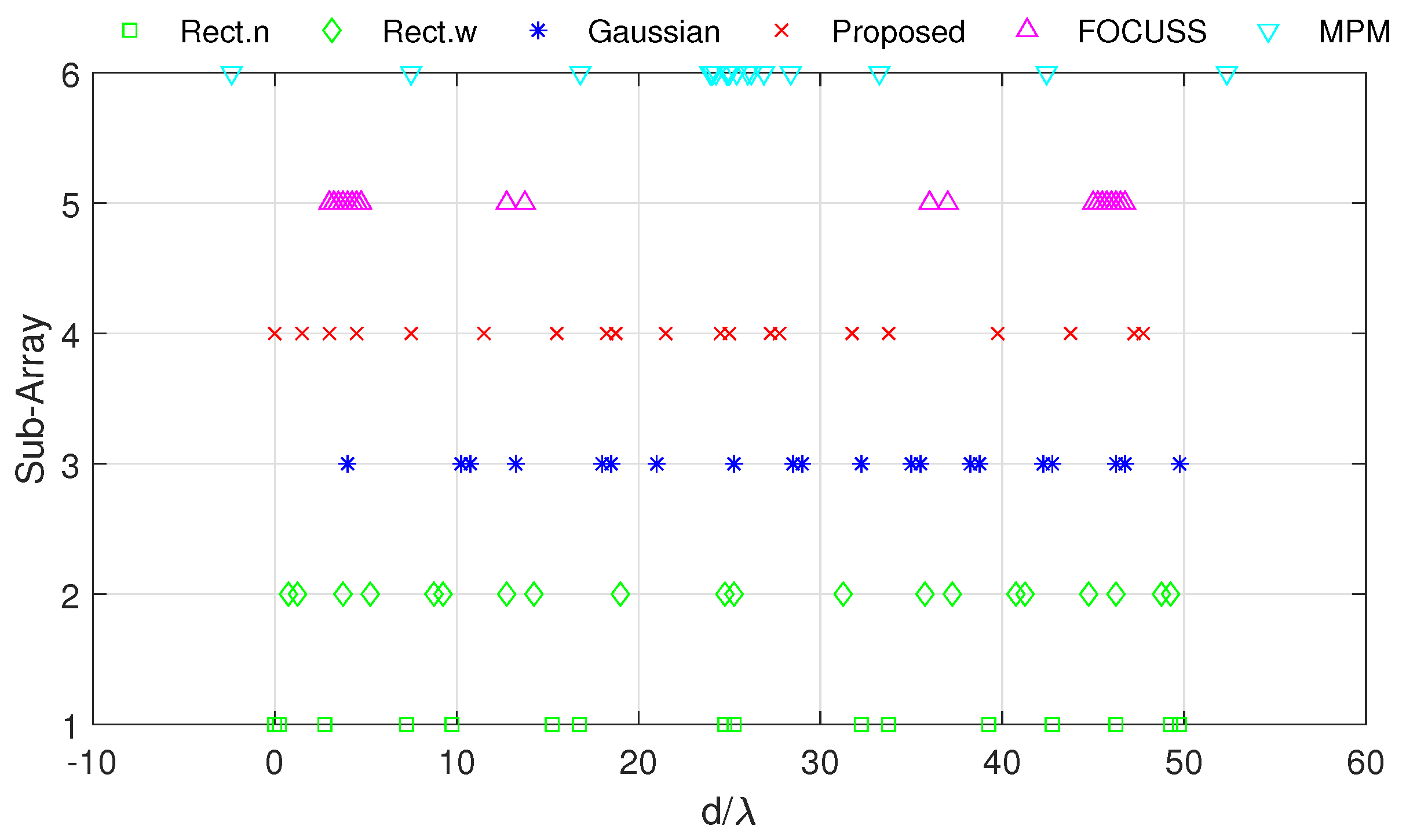
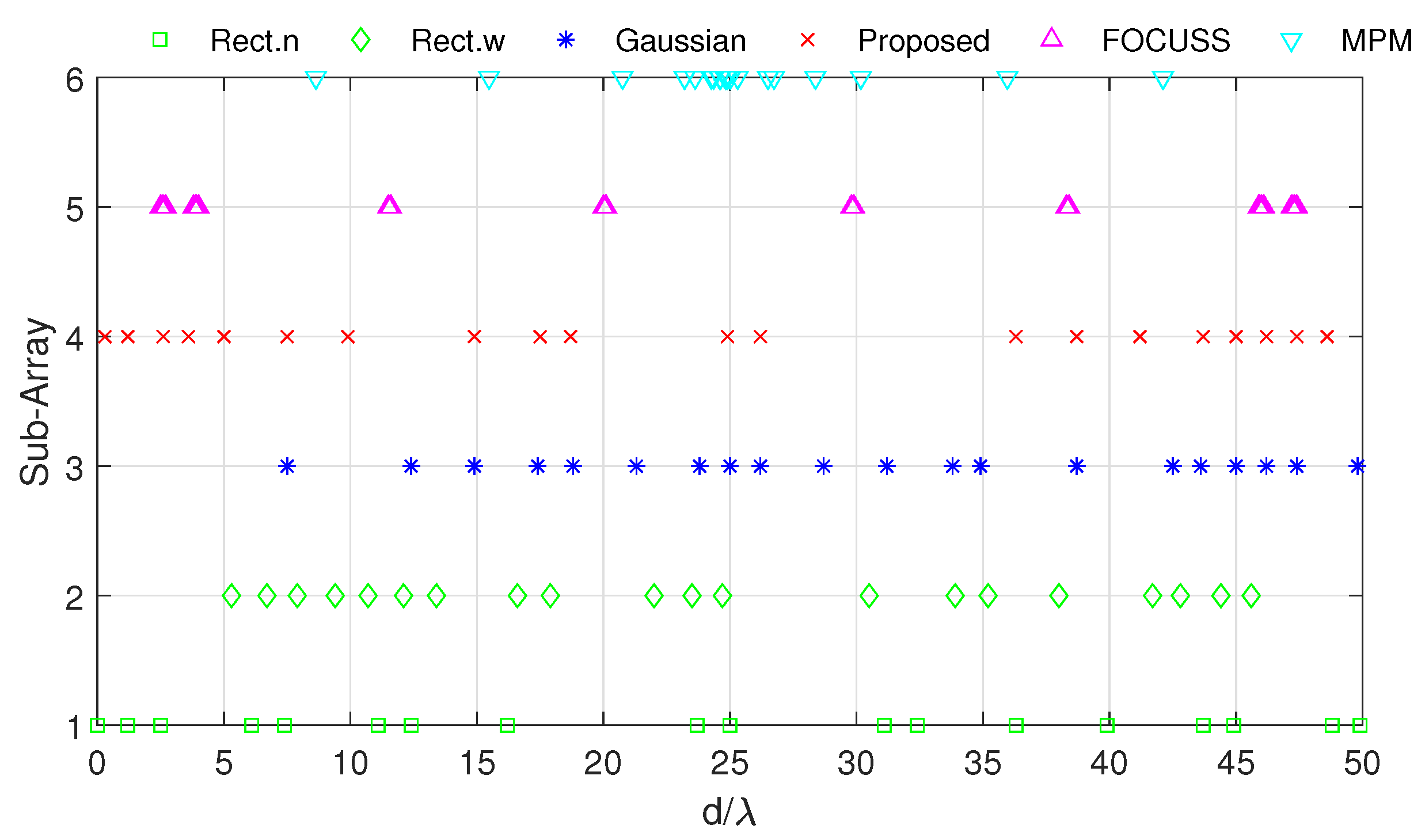
The blue “·” shows the error of the original array, which is considered as a reference of the DOA estimation performance; the red “×” corresponds to the subarray generated by the mixed weight, and ; the blue “∗” is the result of the subarray generated by the Gaussian weight; the green “□” and “⋄” are the subarrays generated by the rectangular weights, with widths of and , respectively; the magenta “Δ” shows the error of the subarray generated by the FOCUSS algorithm; and the cyan “∇” denotes the result of the subarray generated by the MPM method.
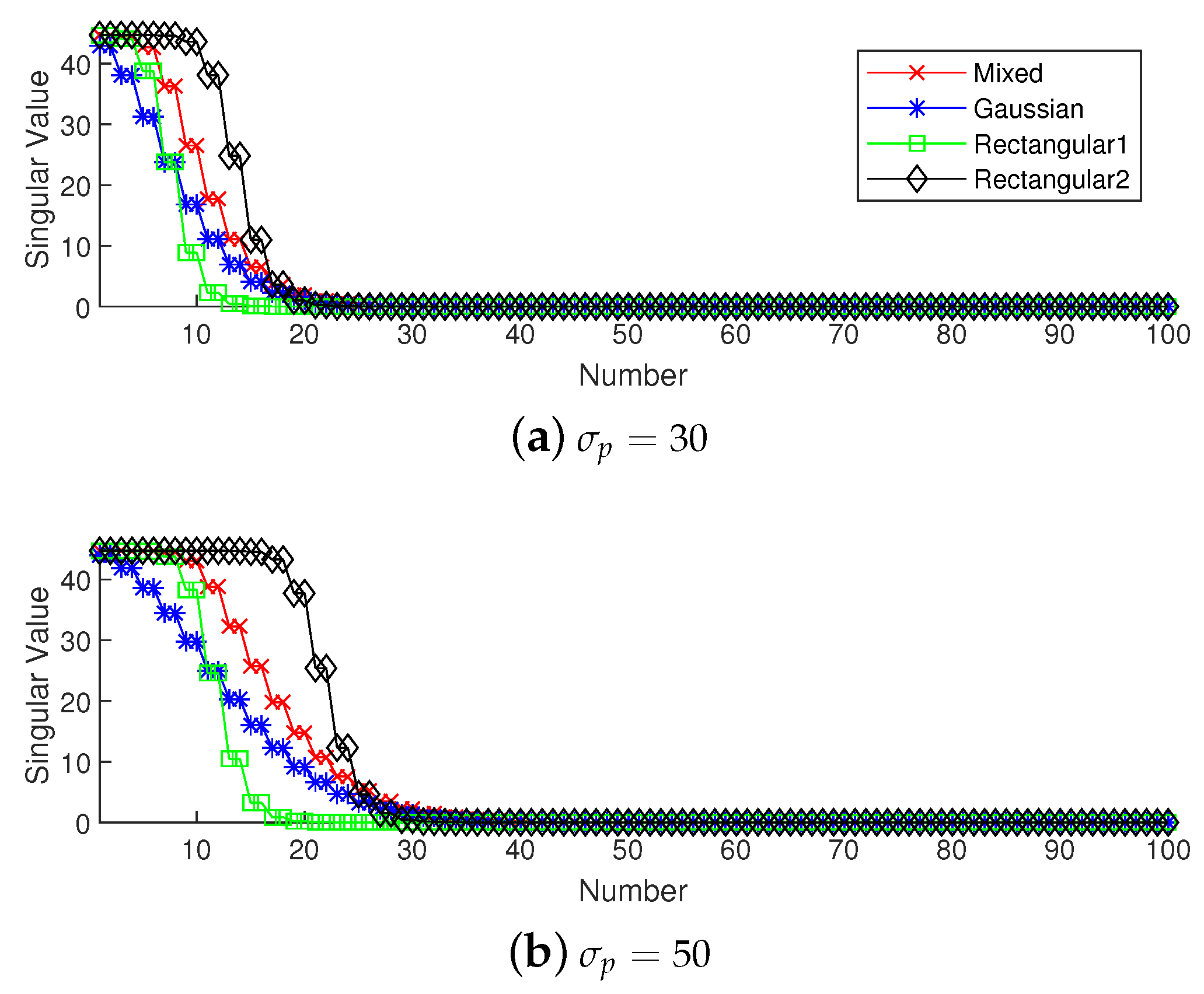
To analyze the influence of different widths of weights, we first show the singular value spectrum of different weighted sensing matrices with different weight widths in
Figure 5.
Figure 5a shows the condition of
, which corresponds to the simulation result shown in
Figure 3. Due to
, the main features, defined as the singular vectors corresponding to the larger singular values, are all chosen by every subarray. This scenario corresponds to the case in which the required number of array elements is sufficient. In this case, the truncation error of each array is small, and the main contribution of error depends on the mismatch error. From the view of angle error, the subarray corresponding to a narrow rectangular weight, therefore, has the worst performance in our proposed methods in terms of including the fewest features; on the contrary, the wide rectangular weight has best performance in our proposed methods in terms of containing the most features, and the Gaussian weight, the mixed weight and the FOCUSS method have moderate performance. From the view of number error, due to the orderless nature of the singular vectors, the number error of the rectangular weights is larger than the other methods. All the methods except the narrow rectangular weight have a similar total performance because their boundaries of large singular values are all near 20 in the singular value spectrum.
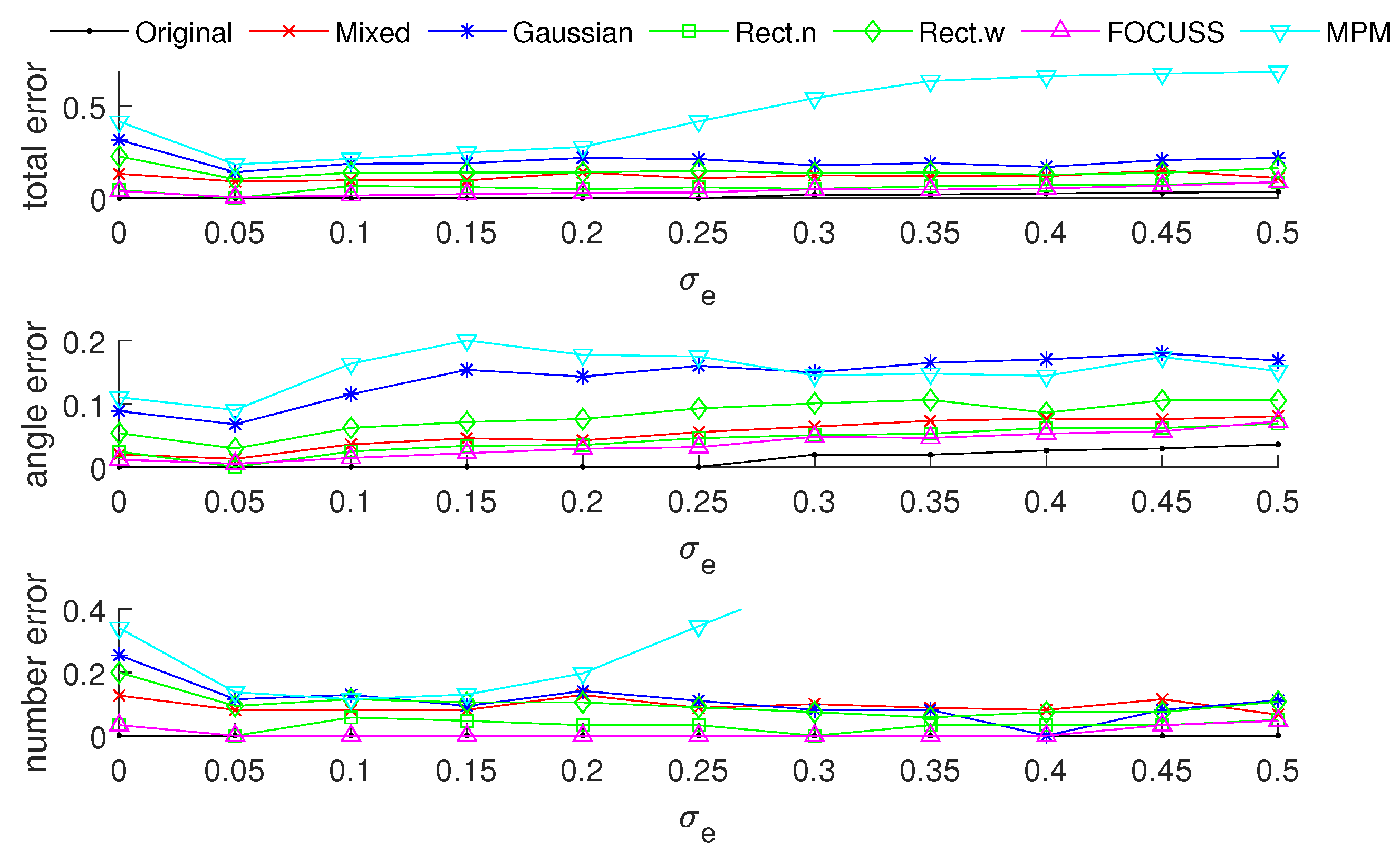
Figure 5b shows the condition of
which corresponds to the simulation result shown in
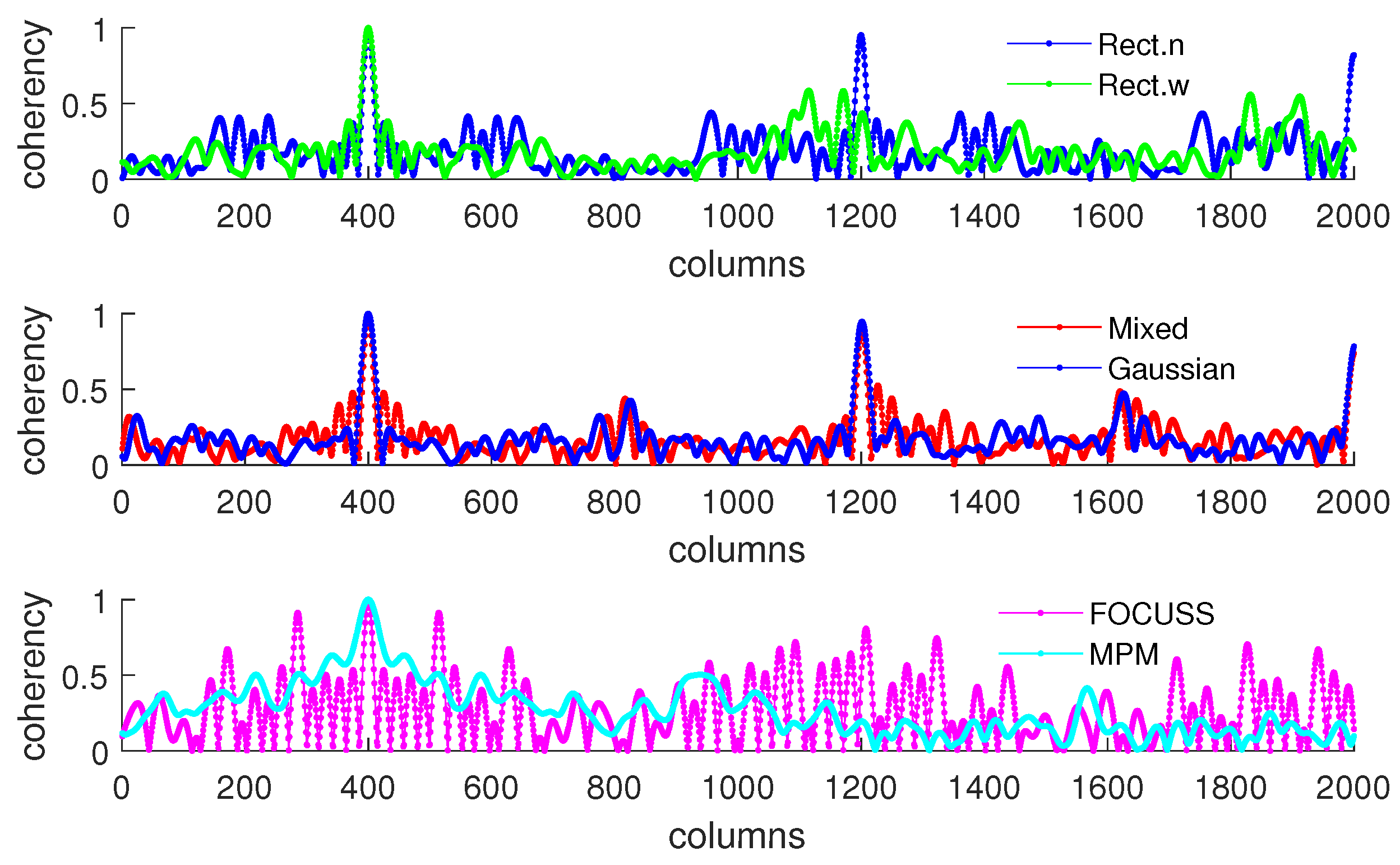
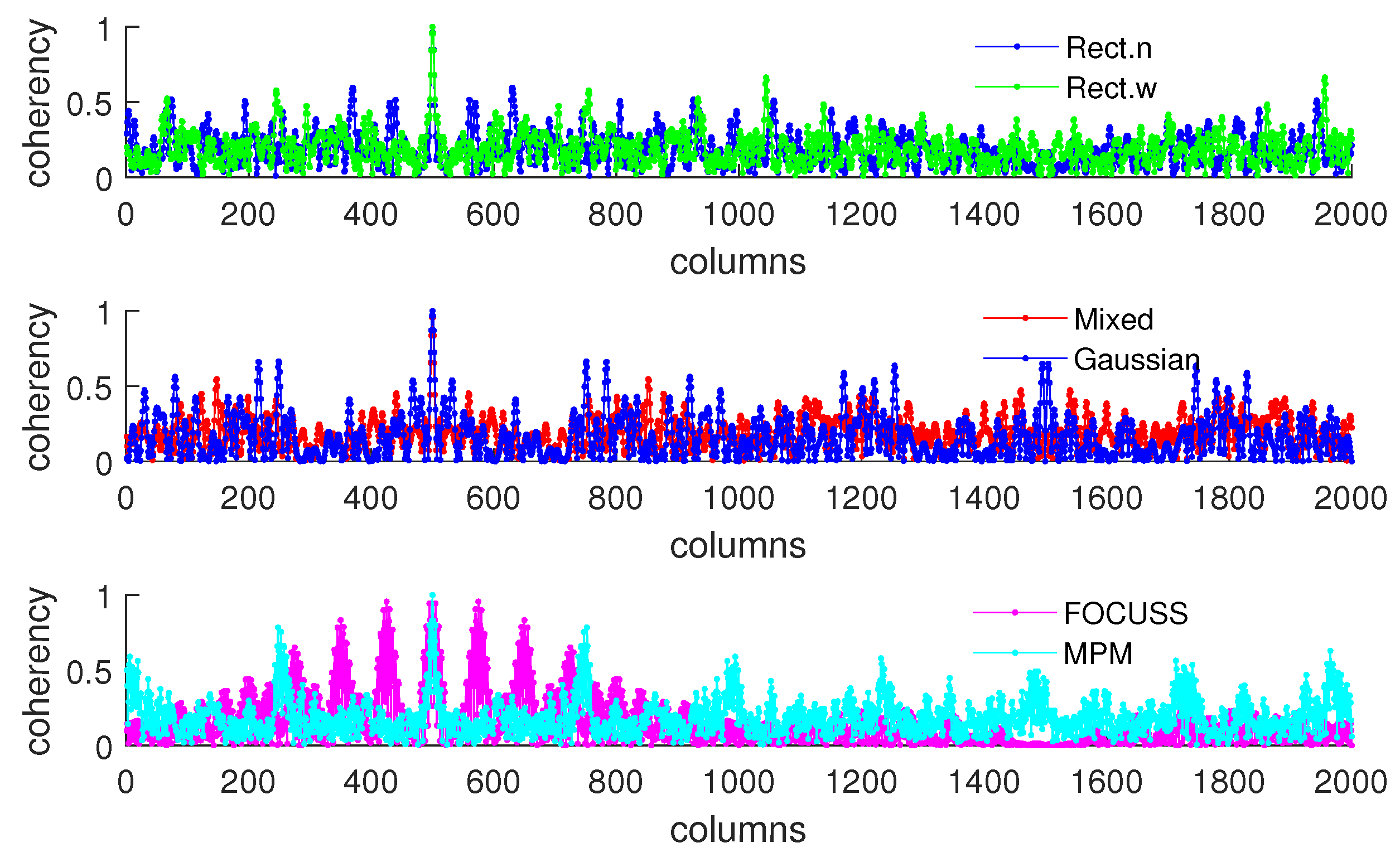
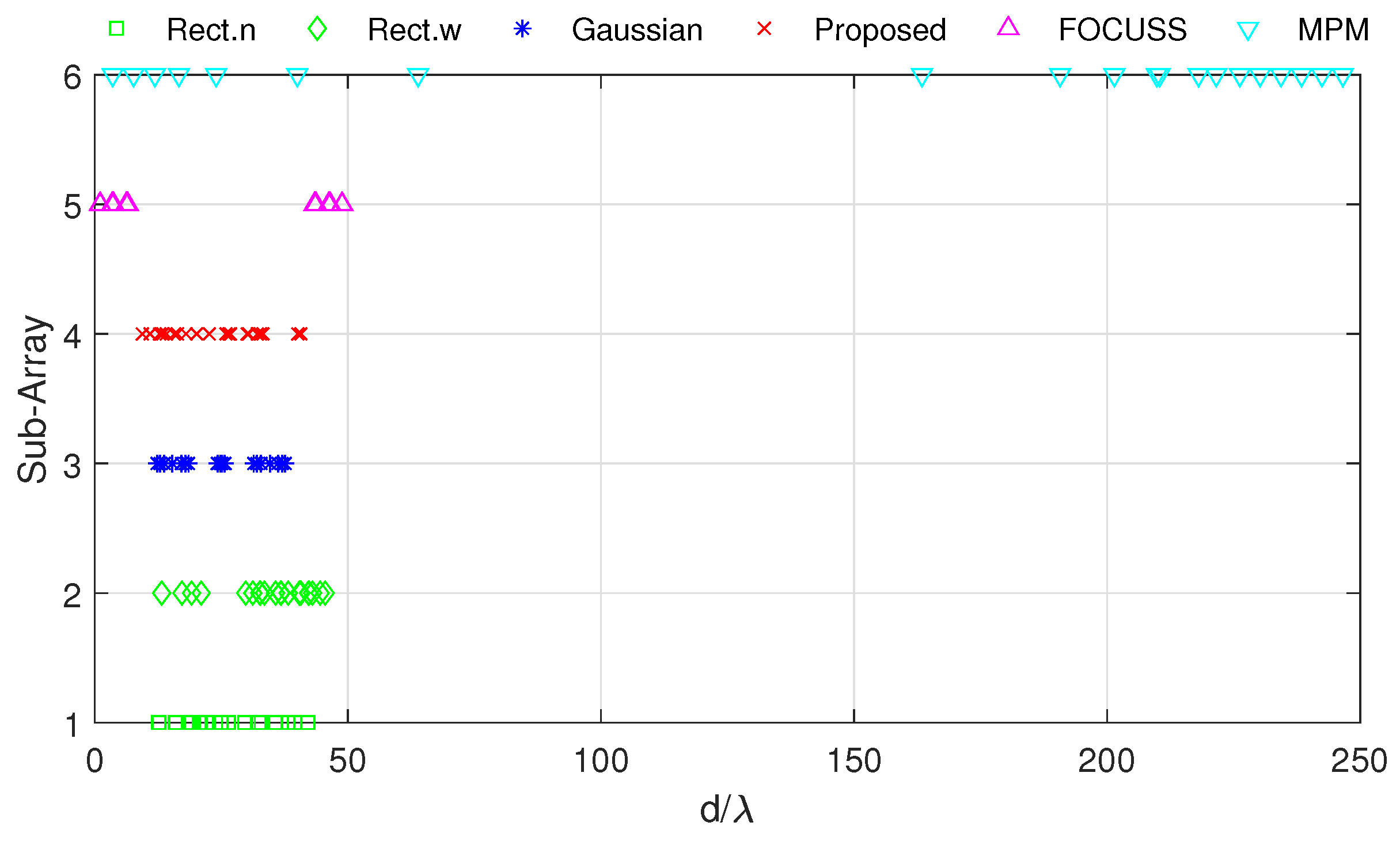
Figure 4. This scenario corresponds to the case in which the required number of array elements is insufficient. In this case, the truncation error of the wide rectangular weight increases rapidly, which causes the angle error to become large. Due to both the truncation error and the mismatch error increasing, the performance of the Gaussian weight has the worst performance. The narrow rectangular weight and FOCUSS method both exhibit similar better performance, and the mixed weight has a moderate performance, placed between the Gaussian weight and rectangular weight. These results can also be reflected in the coherence curves shown in
Figure 6 and
Figure 7.
5.3. Simulation 2
This simulation shows some scenarios in which the mean of prior distribution is accurate but the variance is smaller or larger. According to the principle of the target filter, a variance of prediction larger than the true variance is common in practice. Meanwhile, an initial given value being inappropriate—or other reasons—may lead to the variance of prediction being overly small; therefore, the mismatch of variance between the prior and true distribution is significant in actual application.
In this simulation, the subarray is based on a ULA which consists of elements with the element interval of . Here, the required number of array elements is also . This setting is equivalent to adding one uniform spacing element between the array elements in Simulation 1 and keeping the total array aperture the same. The prior distributions are given by and , and true distributions are given by and . The other parameters are the same as in Simulation 1.
Figure 8 and
Figure 9 show the DOA estimation error in terms of the OSPA distance with the variance of prior distribution given by
when the variance of true distribution is given by
and
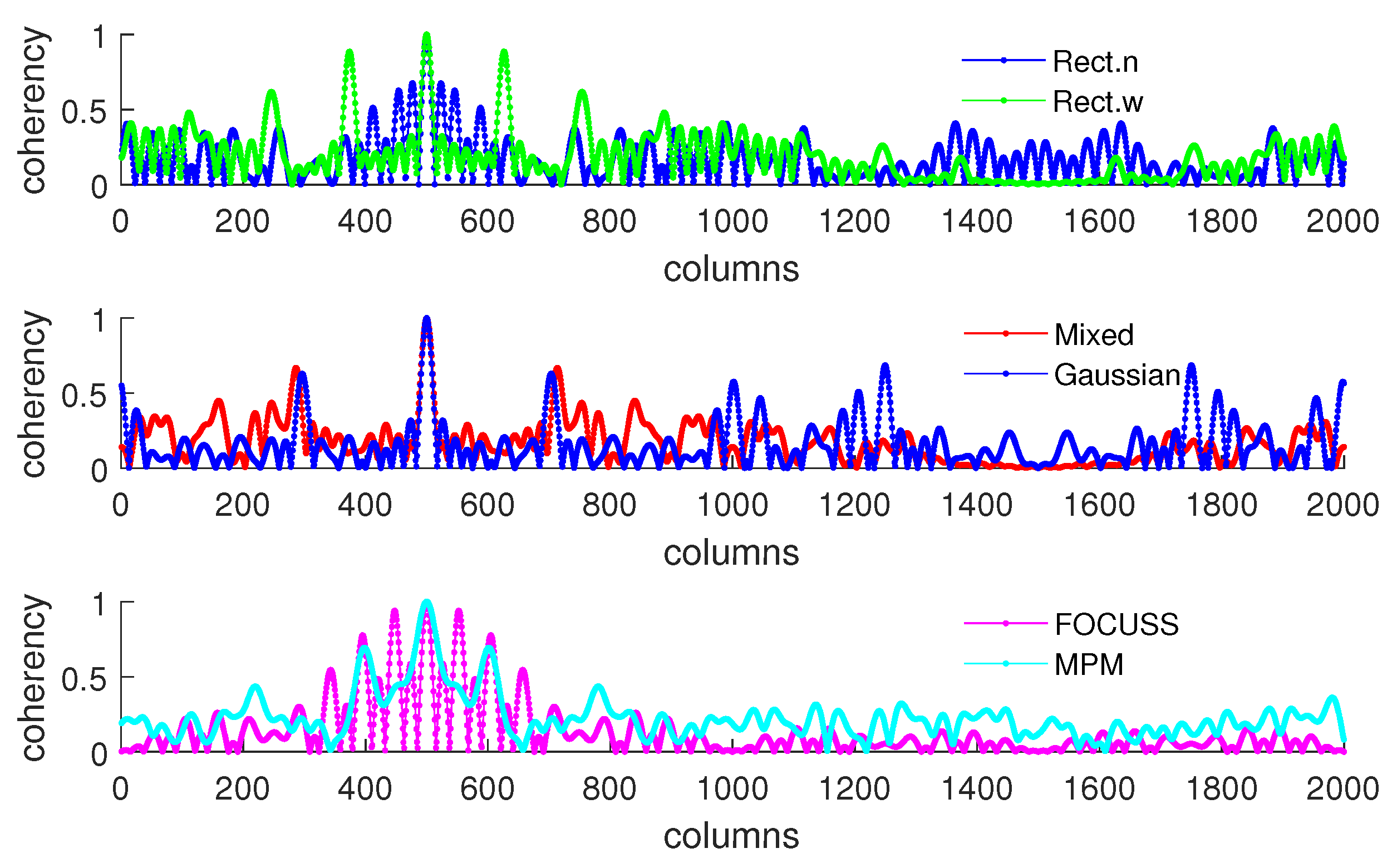
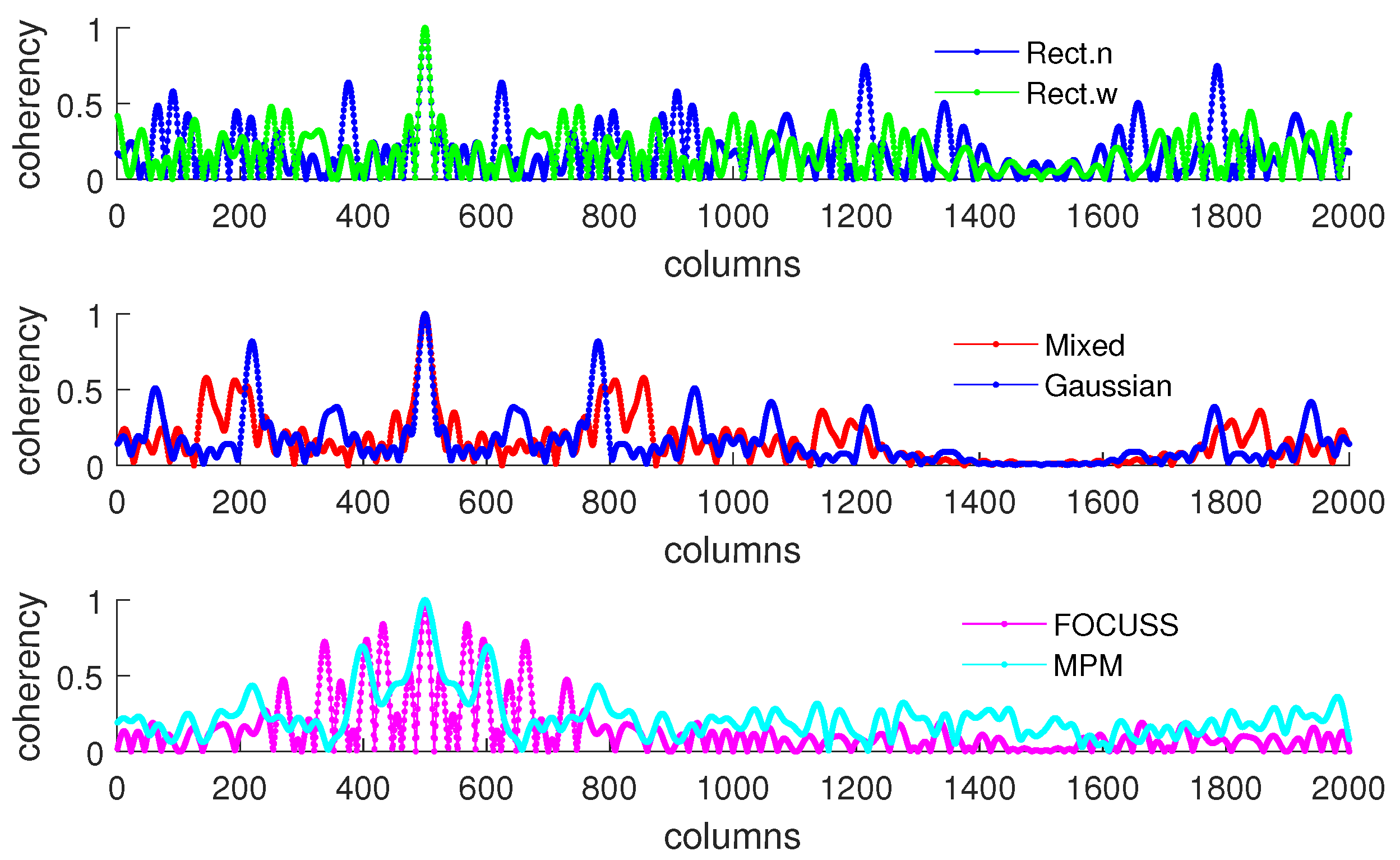
. The coherence curves and element positions of the corresponding subarrays in this simulation are shown in
Figure 10 and
Figure 11.
Figure 8 is the simulation result under the condition of
and
. This scenario corresponds to the case at the beginning of target tracking. In this case, the narrow rectangular weight has the best performance in terms of angle error and total error; the mixed weight performs best in terms of estimating the number of targets, and it has a similar total performance to the narrow rectangular weight.
Figure 9 shows the simulation results under the condition of
and
. This scenario corresponds to the case of filter divergence when the measuring system encounters a poor environment. The mixed weight almost has the best performance for the three kinds of errors; the Gaussian wight is worse than the other methods we proposed. In both cases of this simulation, the performance of the FOCUSS method is poor.
5.4. Simulation 3
This simulation is performed under the condition of unreliable prior information which completely does not fit the true distribution. The prior distributions of DOAs are given by and . The true DOAs, however, are generated from the distributions given by and .
The original array is a ULA of elements with an interval of . This setting is equivalent to adding four uniform spacing elements between the array elements in Simulation 1 and keeping the total array aperture the same. The other parameters are the same as Simulation 1.
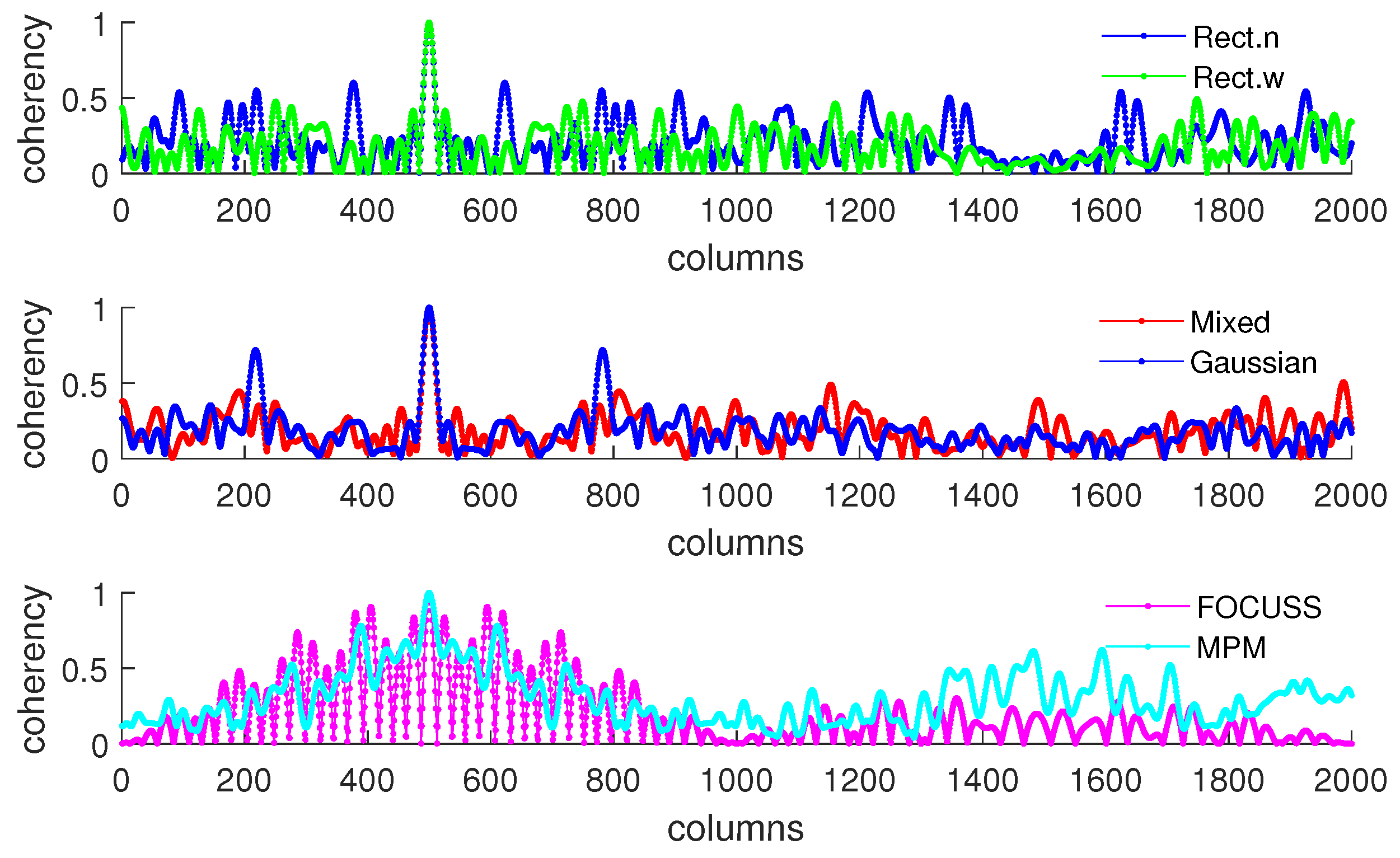
The DOA estimation error is shown in
Figure 12, and the coherence curves at the direction
and the element positions of the corresponding subarrays in this simulation are shown in
Figure 13 and
Figure 14. In this simulation, all the methods have low performance in terms of the mismatch between the prior distribution and the truth. From the perspective of angle error, the Gaussian and narrow rectangular weight methods show poor performance due to their wide main-lobes. For the contrary reason, the mixed weight and wide rectangular weight methods perform well. Consequently, the mixed weight showed the best overall performance in this simulation.
5.5. Simulation 4
This simulation is based on a an arbitrary array of 500 elements. Each element location is based on the setting in Simulation 3 but with a random walk which obeys the normal distribution . The prior distributions of DOAs are given by and . The true DOAs, however, are generated from the distributions given by and . The other settings are the same as Simulation 1.
Figure 15 shows the DOA estimation error in terms of OSPA distance with a variance of prior distribution given by
and
when the true distributions are the same. The coherence curves and element positions of the corresponding subarrays in this simulation are shown in
Figure 16 and
Figure 17.
Because the original array in this case is equal to the random sampling, which may not meet the requirements of the Shannon–Nyquist theorem, the original array does not have the best performance in all conditions [
4]. In contrast, the subarray generated by the proposed algorithm is used for the purpose of optimizing array coherence, while the DOA estimation algorithm used here is based on compressed sensing. Thus, the subarrays generated by the proposed algorithm show better performance.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}