1. Introduction
Underwater acoustic sensor networks (UASNs) is a network composed of underwater sensor nodes randomly distributed in a certain observation area and uses underwater acoustic signals to communicate with each other. The research on underwater sensor networks has achieved rapid development in recent years. That is due to the wide range of UASNs applications from the petroleum industry to aquaculture, including instrument monitoring, pollution control, climate recording, natural interference prediction, search and investigation tasks, and marine biological research. Some applications such as marine resource exploration, military reconnaissance, underwater target monitoring and tracking, disaster prevention, and navigation [
1,
2] are required to locate the underwater target, as the purpose of the sensor network is not limited to only collect the underwater related data. Especially in disaster prevention applications, UASNs can promptly find seismic activity from remote areas through acoustic source localization, and provide earthquake or tsunami warnings for seaside areas. In addition, in order to improve communication and network performance, location information is also very useful for improving technologies such as topology control, routing, and packet collision avoidance [
3]. Therefore, the problem of underwater acoustic source localization has become the key technology of UASNs and the most popular research hotspot in recent years.
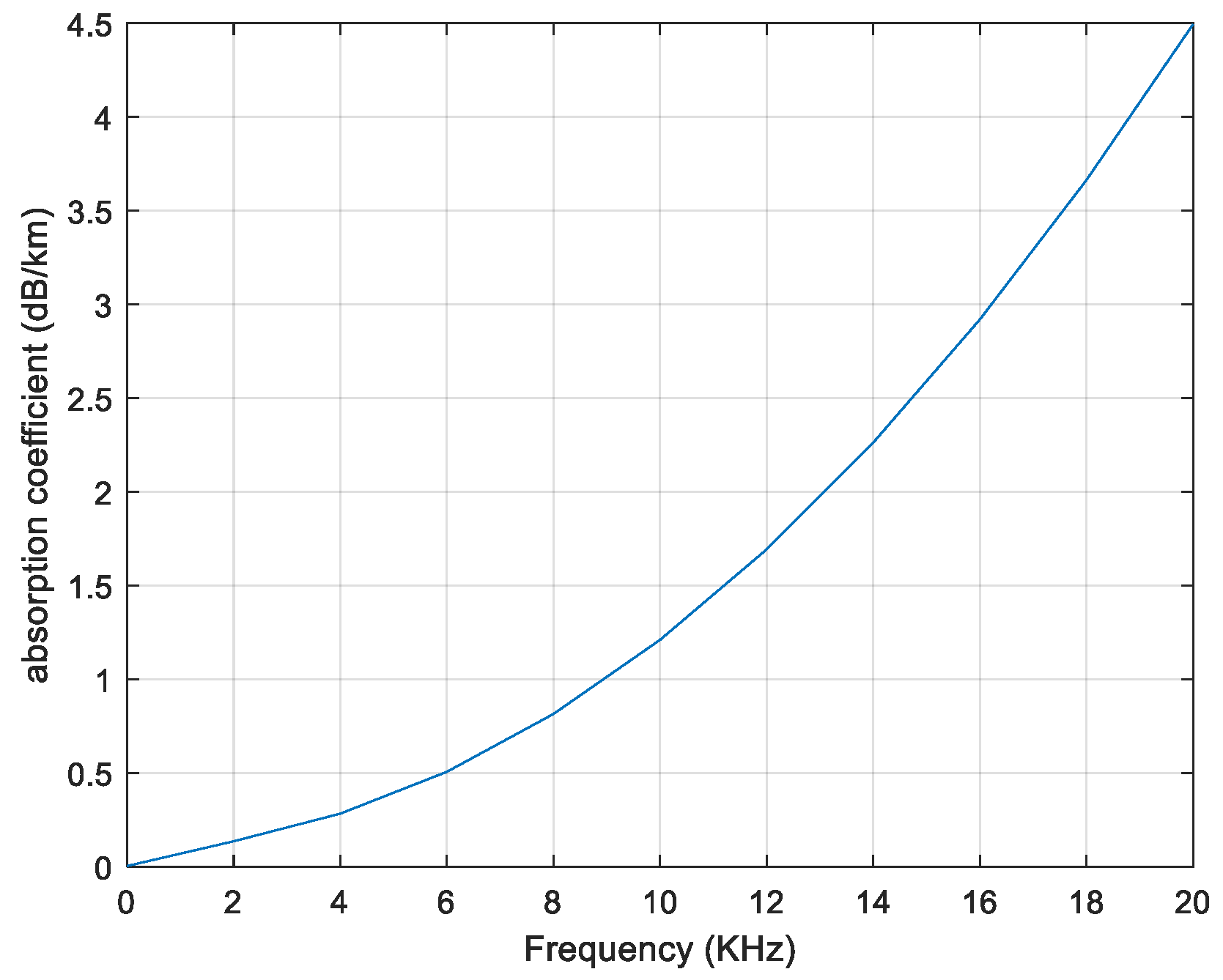
However, due to the complexity of the marine environment, underwater positioning faces enormous difficulties and challenges compared to terrestrial wireless positioning [
4,
5]. The major difference between UASNs and terrestrial wireless positioning is the propagation signal types; the transmission signal used in UASNs is acoustic while the radio frequency is the transmission signal for the terrestrial wireless communication. The electromagnetic waves can only propagate through seawater over long distances at very low frequencies (30~300 Hz), and such low-frequency of radio signals require longer antennas and high transmission power. In the acoustic underwater data transmission, the acoustic signal attenuation is small hence it can support long-transmission distance, but the low speed of sound in ocean water (approximately 1500 m/s) yielding large propagation delay. Also, the acoustic channel bandwidth is limited, and factors such as multipath, channel fading, noise interference, and Doppler frequency shift will cause high channel error rate or even interruption. Hydroacoustic sensor nodes are affected by environmental factors such as ocean currents, temperature, salinity, and uncontrollable motion, and sensor nodes movement caused by water flow is inevitable. Due to all of the above challenges, underwater localization is an unease task, and a lot of researches is still needed at this point to improve the underwater localization techniques.
There are many types of research work on the acoustic-based localization, but most of these researches are applied on terrestrial applications and most of these algorithms are not suitable for underwater acoustic source localization. Nonetheless, there are some methods suitable for underwater (see [
6,
7]). In these positioning methods, the position of the underwater sensor node needs to be known in advance. These position-knowing nodes are called anchors in some works of literature [
8,
9], and the target nodes are called agents.
In [
10], the author proposes an auxiliary positioning scheme based on the angle of arrival (AOA) for underwater Ad-Hoc sensor networks in 2-D and 3-D. This AOA acoustic localization technique classified the underwater nodes for sensor nodes and anchor nodes. Only one of the sensor nodes can communicate with the first anchor node in this scheme and estimate the distances between other sensor nodes and anchor nodes. The estimated distance is calculated with AOA assistance. In [
11] authors have proposed a two-step acoustic-based localization technique based on improved received signal strength (RSS). In this scheme, the anchor nodes are placed on the water surface instead of underwater. The base station first uses a regression model to calculate the distance through the RSS information collected by the anchor node, and then roughly estimates the location information. Finally, the position is adjusted by minimizing the relevant mean square error. Underwater acoustic node location-based on the time of arrival (TOA) ranging strategy is proposed in [
4]. In this scheme, the authors consider the problem of the underwater sensor motion due to the water flow. In this research, the grey wolf optimization algorithm has been proposed to estimate the optimal location of the underwater node’s and underwater displacement. In addition to the main acoustic-based localization schemes mentioned above, there are many other methods such as range-free [
6] localization scheme.
The current acoustic-based localization methods mentioned above have many drawbacks, for example, the AOA-based algorithm may be affected by a severe Doppler shift in the underwater acoustic channel. As the underwater power loss is dependent on the communication distance and carrier frequency, the RSS-acoustic localization method results in ambiguous. The underwater acoustic-based TOA scheme requires very precise time synchronization, which is uneasy to be satisfied in the underwater communication. Although the localization method based on sound line correction [
12] is more realistic, unfortunately, it did not further optimize the position to reduce the error. Due to the shortcoming in the current underwater localization, we applied the majorization-minimization (MM) algorithm based on time difference of arrival (TDOA) localization method to further optimization for the acoustic source localization. Using the TDOA acoustic-localization, the proposed algorithm in this paper is capable to estimate the location of the sensors only by using the measured time difference between the signals arrived at different sensors hence it is not affected by power loss and Doppler shift, and it also does not need accurate time synchronization. Due to all these features, the TDOA is more fitted for underwater acoustic-based localization. To improve the estimation accuracy of the proposed scheme, the MM algorithm is applied to the TDOA estimation. The MM-algorithm combination with the TDOA not only improve the estimation accuracy, but it also provides more accurate position information. Due to the high sensitivity of the MM-algorithm to the initial points, the initial point is set based on an initial point gradient algorithm. The proposed combined TDOA-MM (T-MM) algorithm with an assistant of an initial point gradient algorithm avoid the current drawbacks of the conventional acoustic-based localization.
In this paper, we assume that the sensor nodes know their axes coordinates in advance via global positioning system (GPS) and buoy, or by using the same method proposed in the literature [
3]. We also derive and study the corresponding squared position error bound (SPEB) derived by Cramer-Rao lower bound (CRLB). Numerical simulations have also been conducted for evaluating the localization performance of our proposed algorithm. The main contributions of this paper can be summarized as follows.
- (1)
We investigated the unconstrained optimization problem based on least squares (LS) and maximum likelihood (ML) localization and applied it to the TDOA acoustic-based localization in the underwater applications. The localization accuracy of our proposed scheme is characterized and evaluated by using the SPEB.
- (2)
The proposed T-MM algorithm is using a multistep localization scheme by dividing the underwater location operation into three steps. First, estimate the distance between the acoustic source and sensor nodes by using the TDOA estimation algorithm. Second, the initial point is adjusted for the MM-algorithm by using an initial point gradient algorithm to improve the MM-algorithm operation. In the third operational step, the obtained initial point is used via the MM-algorithm to improve the localization accuracy.
- (3)
In this paper, we drove a mathematical framework for the proposed T-MM acoustic-based localization algorithm.
- (4)
We compare the performance of the proposed T-MM algorithm in terms of estimation accuracy with some of the state of the art acoustic-based localization techniques used currently in the underwater localization. Based on the simulation results, the performance of the proposed T-MM algorithm is more superior even under high underwater noise and its performance is evaluated by using the SPEB metric.
This paper is organized as follows: We first review the related work in
Section 2.
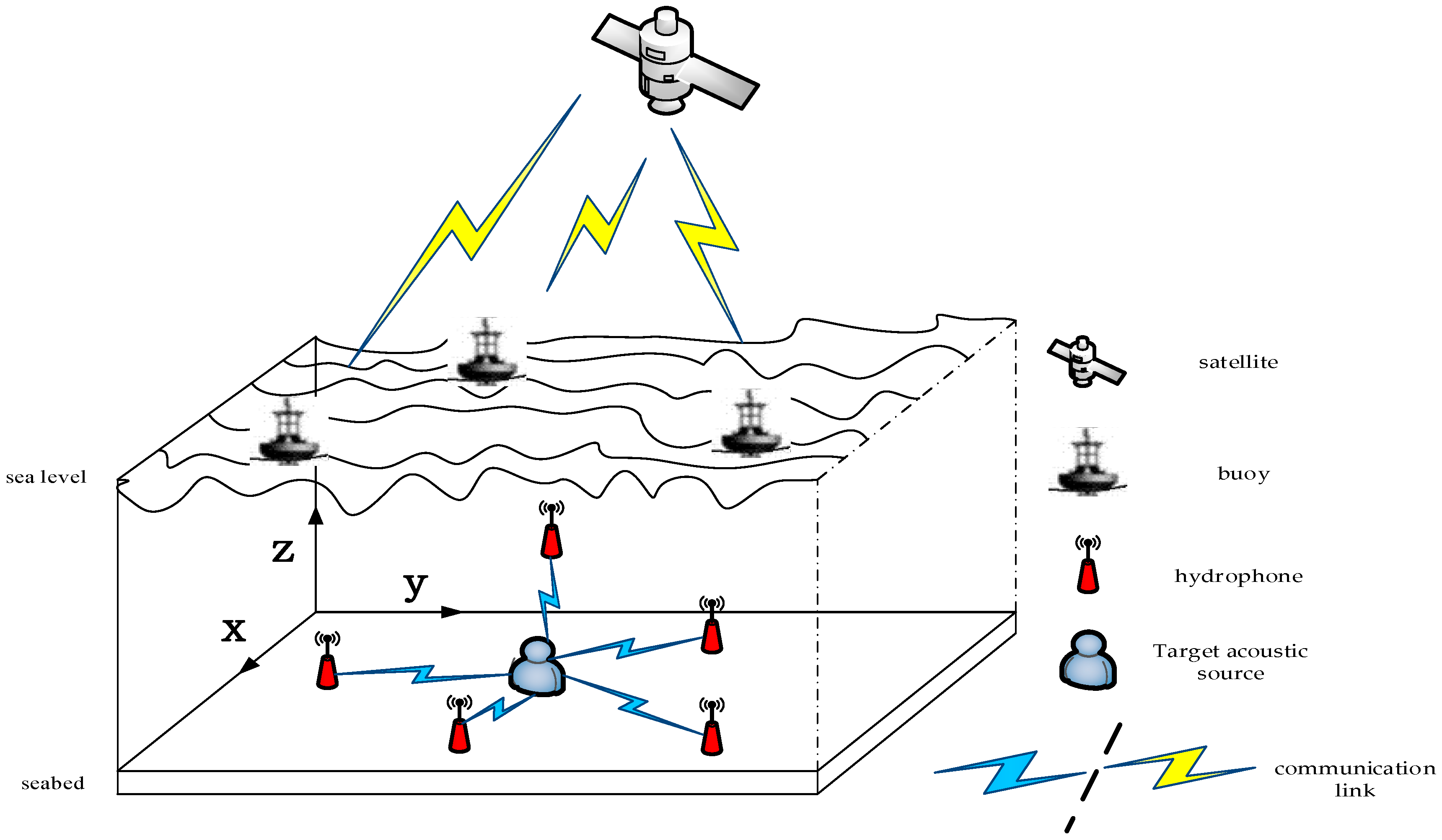
Section 3 demonstrates the system model and showing the communication Model.
Section 4 mainly explains the optimization problem of localization and the proposed MM algorithm to solve it. In
Section 5, the proposed T-MM is proposed and then derived the SPEB as a metric to evaluate its positioning performance. Finally, simulation results and performance analysis are given in
Section 6, and conclusions are drawn in
Section 7.
Notation: The following notations are used in this paper. indicates an n-dimensional real space; upper bold-face letters stand for matrices and lower bold-face letters stand for vectors; denotes the Euclidean distance norm of vectors ; indicates the gradient of function ; denotes the expectation operator; superscript denotes the transpose of a matrix (vector); denotes the trace of a square matrix ; is the upper left submatrix of matrix ; denotes the inverse of the matrix ; indicates rank of matrix .
2. Related Works
In this section, we briefly overview the current localization techniques using the TDOA applied for the underwater wireless sensor networks. In addition to the estimation techniques used for optimizing the acoustic source position and improve the acoustic-based localization in the underwater environments.
TDOA locates the acoustic source by detecting the time difference between signals reaches two sensors. The TDOA reduces the time synchronization requirement between the acoustic source and the receiver sensor, but unfortunately, current TDOA is still required synchronization between the receiver sensors. In [
13] the author uses AUV as a mobile anchor. By receiving the broadcast signal from the AUV, the sensor node can measure the arrival time of the received data packet and obtain a series of nonlinear equations. Then the author uses a two-phase algorithm for localization, in the first phase, the author transforms the nonlinear equations into linear equations and uses the least squares method to obtain coarse time synchronization results. The second phase uses another least square estimator technique to refine the results obtained in the first phase. The time synchronization algorithm proposed in [
14] has considered the mobility of sensor nodes in the underwater wireless sensor networks (UWSN). To consider the node mobility the authors in [
14] designed two mobile reference nodes to eliminate its adverse effects. In addition, the author designed the motion trajectories of two reference nodes in order to ensure the synchronization accuracy.
In [
15] authors have been proposed an acoustic-based localization method for positioning algorithm in the shallow water environment. In this literature, the authors propose a closed-loop tracking algorithm based on Kalman filtering to track the peak of the time correlation of the received signals using two hydrophones. In this scheme, the TDOA is calculated for the acoustic signal through the analysis of the correlation between signals to estimate the sensor position. However, the author only used two hydrophones for receiving signals for TDOA measurements and reduce the positioning system accuracy.
Underwater positioning methods based on the frequency difference of arrival (FDOA) and TDOA have been proposed in [
16] to address the acoustic-based localization in underwater environments. It considers the features of the acoustic signal propagation under undetermined acoustic speed propagation in the water. In this way, the influence of the Doppler effect is reduced with significant improvement for localization accuracy. However, the first-order Taylor approximation is applied during TDOA measurement plus linearized TDOA and FDOA greatly increases the complexity. High complexity acoustic-based localization system is unfortunately unacceptable as the underwater sensor nodes is a battery-based communication system and recharging capability is hard due to ocean environments [
17,
18,
19].
In [
20] authors uses both acoustic and optical signals to locate and track a target ship. The acoustic and optical link are used for the non-line-of-sight and the line-of-sight localization respectively. This hybrid system enables precise positioning tracking and high-speed underwater data transmission, but increases the cost of implementation because the target and AUV must be equipped with a hybrid acoustic-optical transceiver and high cost localization system restricts large-scale applications.
In [
21], two localization algorithms called distance-based and angle-based algorithms for underwater acoustic localization have been proposed. In this scheme, four anchor nodes are placed at the four vertices of the square area, and the positions of the randomly placed mobile nodes are estimated. However, many iterations are required for the system implementation, and severe underwater multipath effects can affect the angle-based algorithm.
An algorithm named second-order time difference of arrival (STDOA) has been applied in finding the black box that was proposed in [
22]. STDOA is defined as the difference of TDOA and it eliminates the unknown signal period. Nonetheless, this algorithm has limitations as it proposed to estimate only the location of the underwater black box. In other words, it is only suitable for estimate the location of sources transmits acoustic signals at a certain period.
There are conventional techniques in estimation theory that can be applied to estimate a target localization. These techniques such as LS estimator, convex optimization, and ML estimator are combined with the TDOA localization scheme. The combined TDOA localization technique with the optimization algorithms is a semi-definite programming (SDP) in [
23,
24], TDOA-LS based in [
25,
26], and TDOA-ML acoustic-based localization in [
27]. The SDP-based method relaxes the original non-convex problem onto a convex set, thus effectively solving the new optimization problem [
28]. However, the SDP model assumes that the input data are noise-free, this is not a realistic assumption because sensor measurements are often noisy. Moreover, for a good estimation accuracy, the relaxation needs to be very tight, which is rather challenging, not to mention the high computational complexity for solving the final problem. LS method is a very useful method used to solve TDOA positioning problem and in [
25], the squared-range based LS formulation is exploited. Then the problem is converted into a known class of optimization problems, namely generalized trust region sub-problem (GTRS), using the concepts in robust statistics. Two algorithms are proposed to solve this GTRS problem, called squared range iterative reweighted least-squares (SR-IRLS) and squared range gradient descent (SR-GD) algorithm. Unfortunately, the two algorithms have computation complexity and high computation complexity is unacceptable in the underwater applications due to energy restrictions. In another related literature [
26], the author first converts the obtained squared range least square (SR-LS) optimization problem into a constrained optimization problem and then try to solve the optimization problem by discarding the quadratic constraints. Several algorithms based ML criteria were also reported in [
27], unfortunately, these localization algorithms are a tradeoff between the complexity and accuracy.
Therefore, this paper introduces the MM optimization algorithm in combination with TDOA localization for underwater acoustic localization. The proposed scheme improves the accuracy of the underwater positioning, in addition to, relax the system computation complexity compared with the state of the art acoustic-based localization techniques used in underwater applications.
6. Numerical Simulation and Discussion
In this section, the performance of the proposed acoustic-based localization scheme is evaluated by a statistical underwater acoustic channel model as well as the bellhop underwater channel model. Under the two-channel models, the performance of the T-MM acoustic-based localization based on the initial point explained in detail in Algorithm 2, is evaluated and tested. In this section, the proposed scheme is compared with the existing localization algorithms used in the underwater through Monte Carlo simulations. In this section, we will compare the proposed algorithm with SR-LS [
26], unconstrained squared-range-based LS estimate (USR-LS) [
26], substantively weighted least squares (SWLS) [
27], and semidefinite relaxation (SDR) [
24,
26]. The mean square error (MSE) is used in this section to evaluate the performance of the proposed algorithm as
, and the unit of MSE is square meters.
is the correct position of the target acoustic source,
is the estimated position obtained using acoustic-based algorithms and
is the number of ensemble runs. In this simulation, we assume the number of sensors used to estimate the underwater acoustic source is 5, and their coordinates are set to be
. Then the position of the target is set as
. The hydrophone and target coordinates are also in meters.
6.1. Experiment 1: Statistical Underwater Acoustic Channel Model
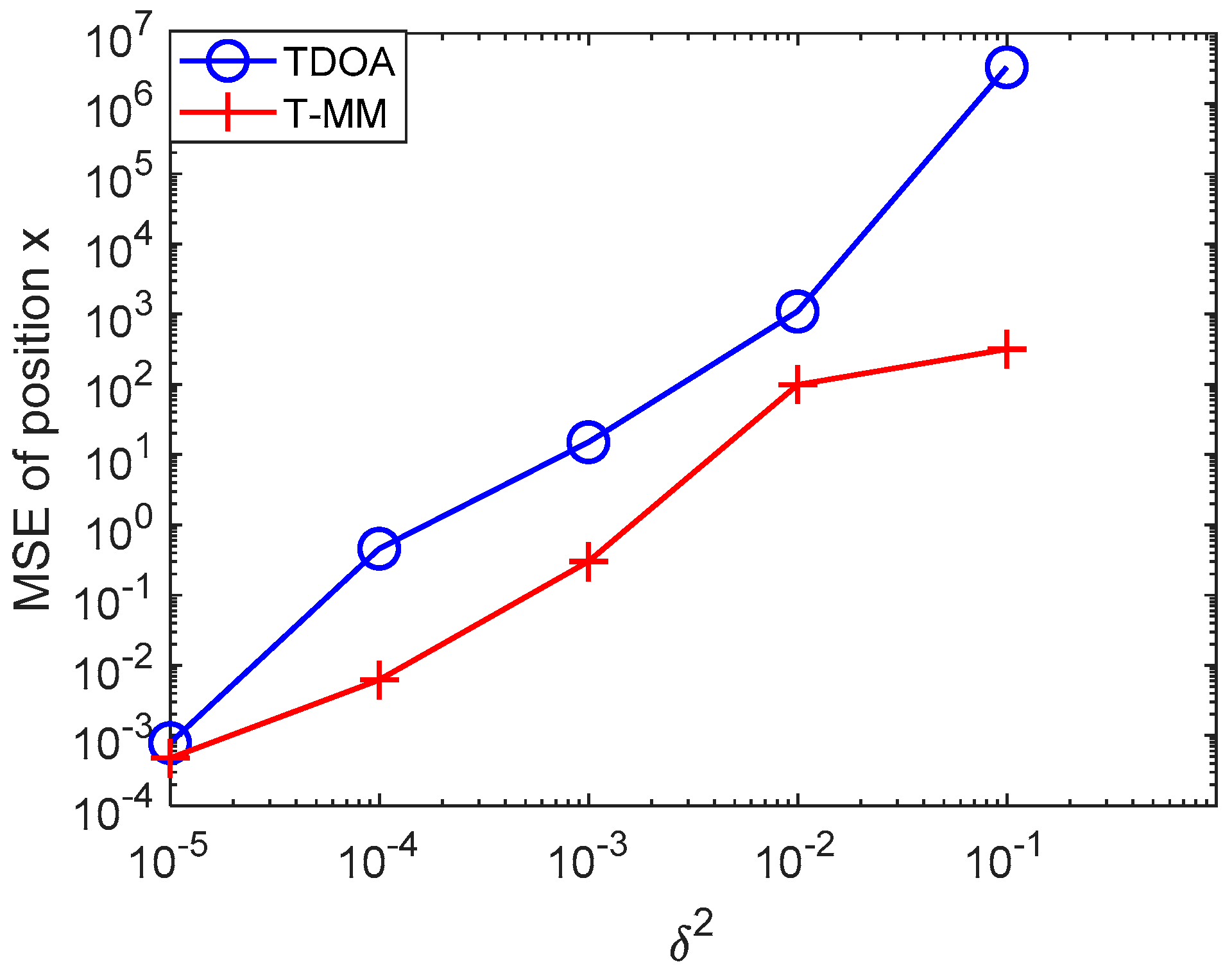
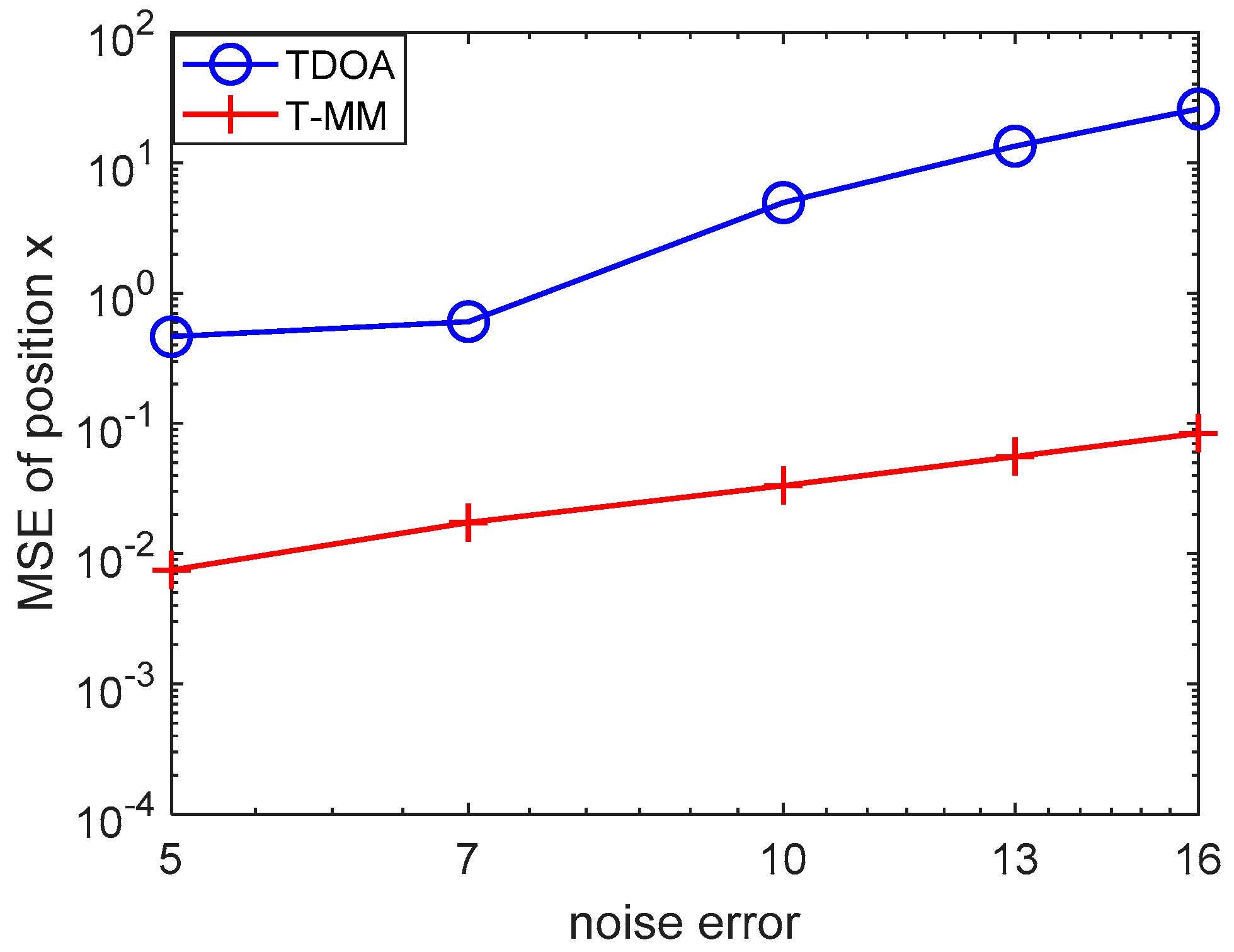
In this simulation, we evaluate the proposed T-MM localization scheme over a statistical underwater acoustic channel model. We conducted 100 Monte Carlo trials and, in each realization, we extract another random set of noise value. We first verified the feasibility of the TDOA algorithm and the T-MM algorithm and then compared the conventional TDOA with the proposed T-MM algorithms. For the variance of TDOA measurement error, we take on:
,
,
,
,
. As shown in
Figure 4, the T-MM outperforms the conventional TDOA in terms of localization accuracy. Then we compared the proposed T-MM algorithm with some conventional localization algorithms and measured distances
given by (7) with
. For variance
of
, we take on five different values calculated from the SNR formula,
,
,
,
,
in our simulation and the SNR formula is defined as
[
35]. For convenience, our simulation scenario considers
dimensional. In general, each acoustic source can be equipped with a pressure sensor that can detect its depth information.
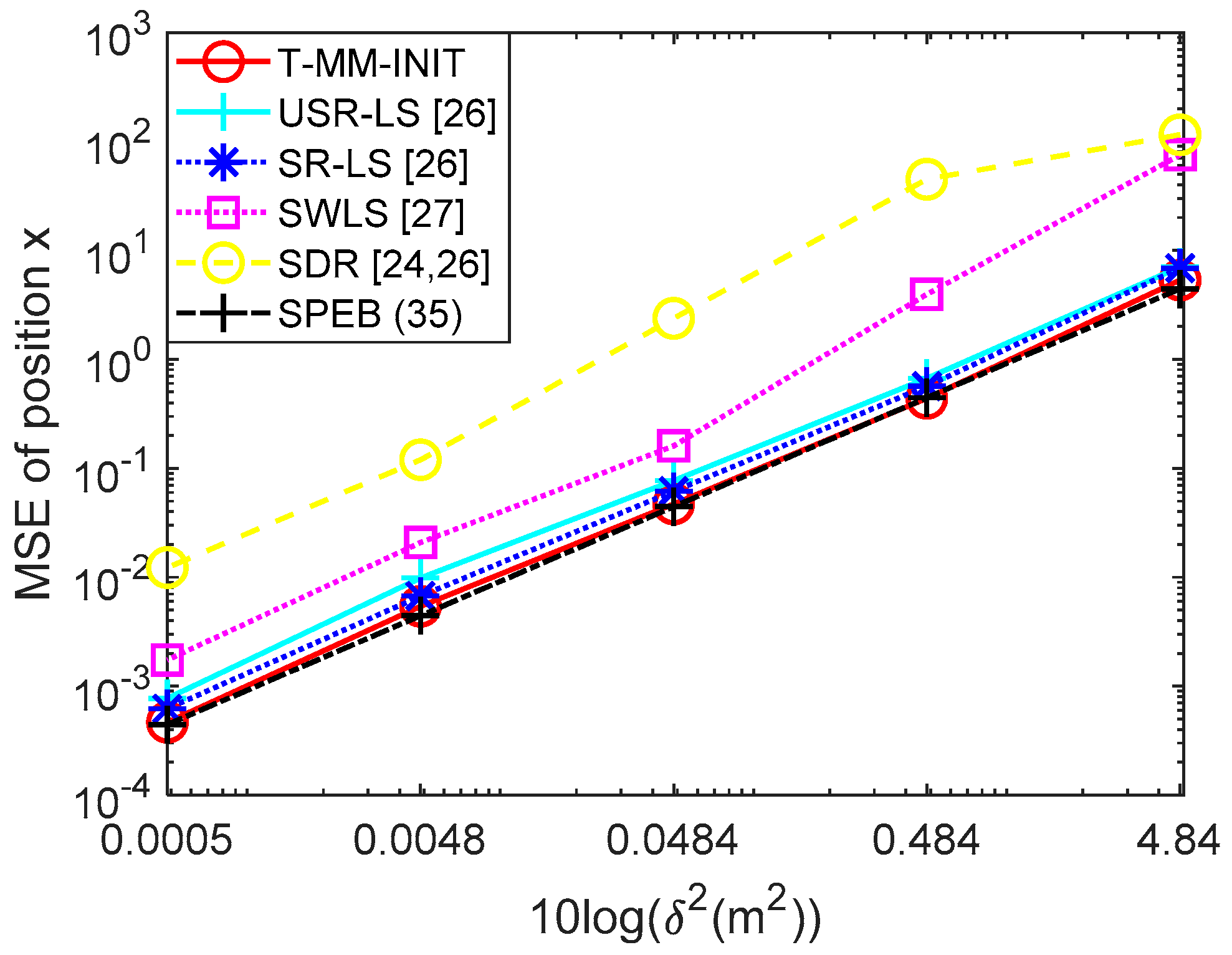
As shown in
Figure 5, the performance of the proposed algorithm is evaluated under underwater noise. As shown in
Figure 5, in case of increasing the underwater noise and compared with the SPEB. The SPEB is calculated based on Equation (35). As shown in
Figure 5, the MSE of the proposed T-MM algorithm provided a localization accuracy nearly the same as the SPEB, even under high environmental noise. In other words, the T-MM is superior and robust to other algorithms. It is worth mentioning that the performance of algorithm SR-LS is very close to T-MM and as the noise level increases, the MSE of algorithm SWLS grows larger, which means that SWLS is less resistant to noise. The SDR performance is relative to other algorithms. See
Table 1 for more details about the MSE’s value of all algorithms.
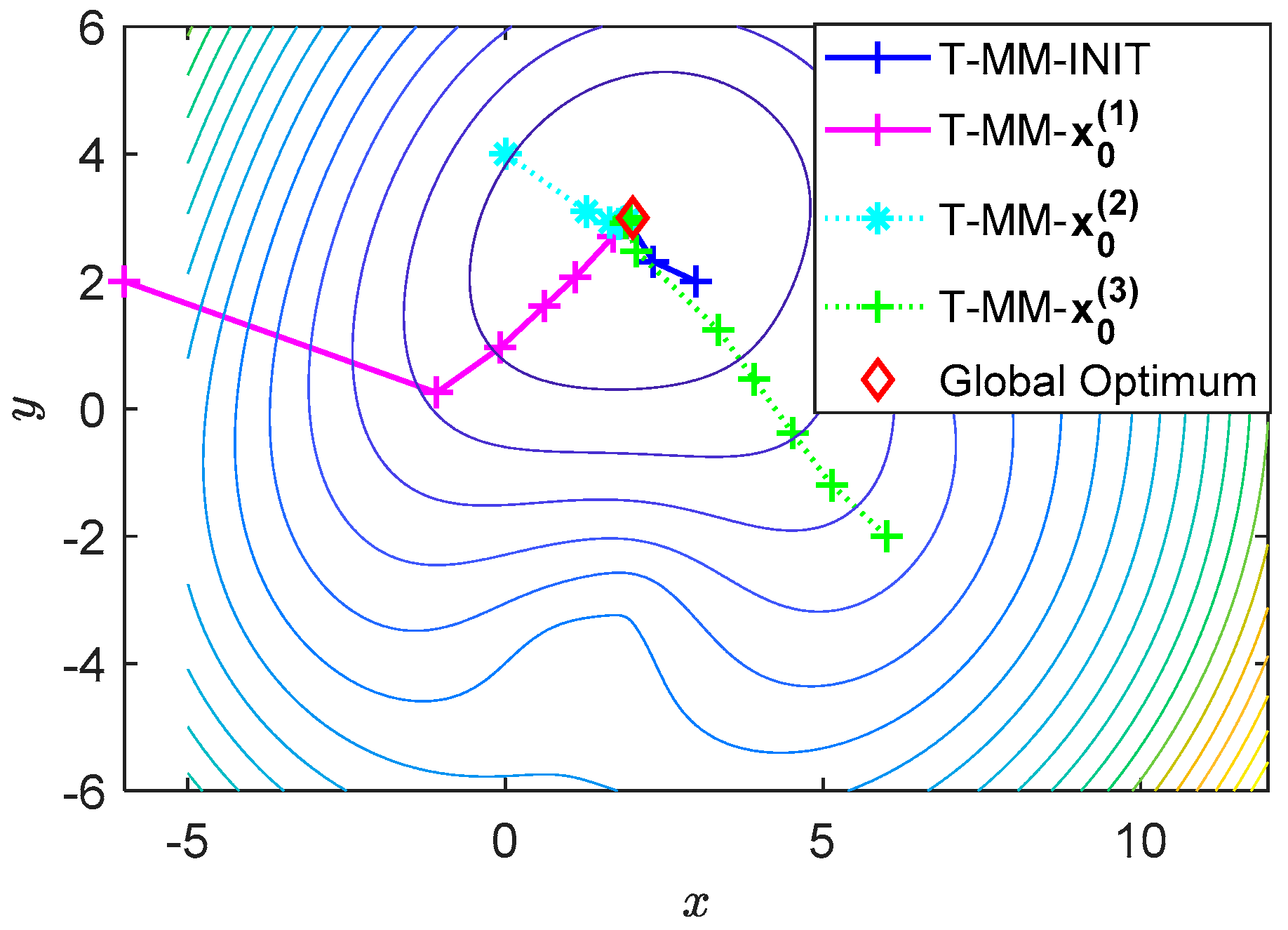
The performance of the prosed scheme is also evaluated under different numbers of iterations and convergence of the T-MM algorithm with different initial points, as depicted in
Figure 6. For the T-MM algorithm, we selected four different initial points for iteration, one is calculated by the initial gradient algorithm, and the remaining three are randomly generated, they are coordinates (−6,2), (0,4), (6,−2) respectively. From the simulation results, we can see that when T-MM uses different initial points, the algorithm can quickly converge to the global optimal. All cases eventually converge to (1.9625, 2.9988), which is very close to the correct coordinates
of the acoustic source. This means the proposed T-MM algorithm is feasible for a suitable random initial point. But T-MM based on the initial gradient algorithm quickly converges to the global optimum, which takes about twenty-six steps. However, the risk of using a random initial point is the randomly selected point may be in the sensor set
, which means that the algorithm will lose its effect.
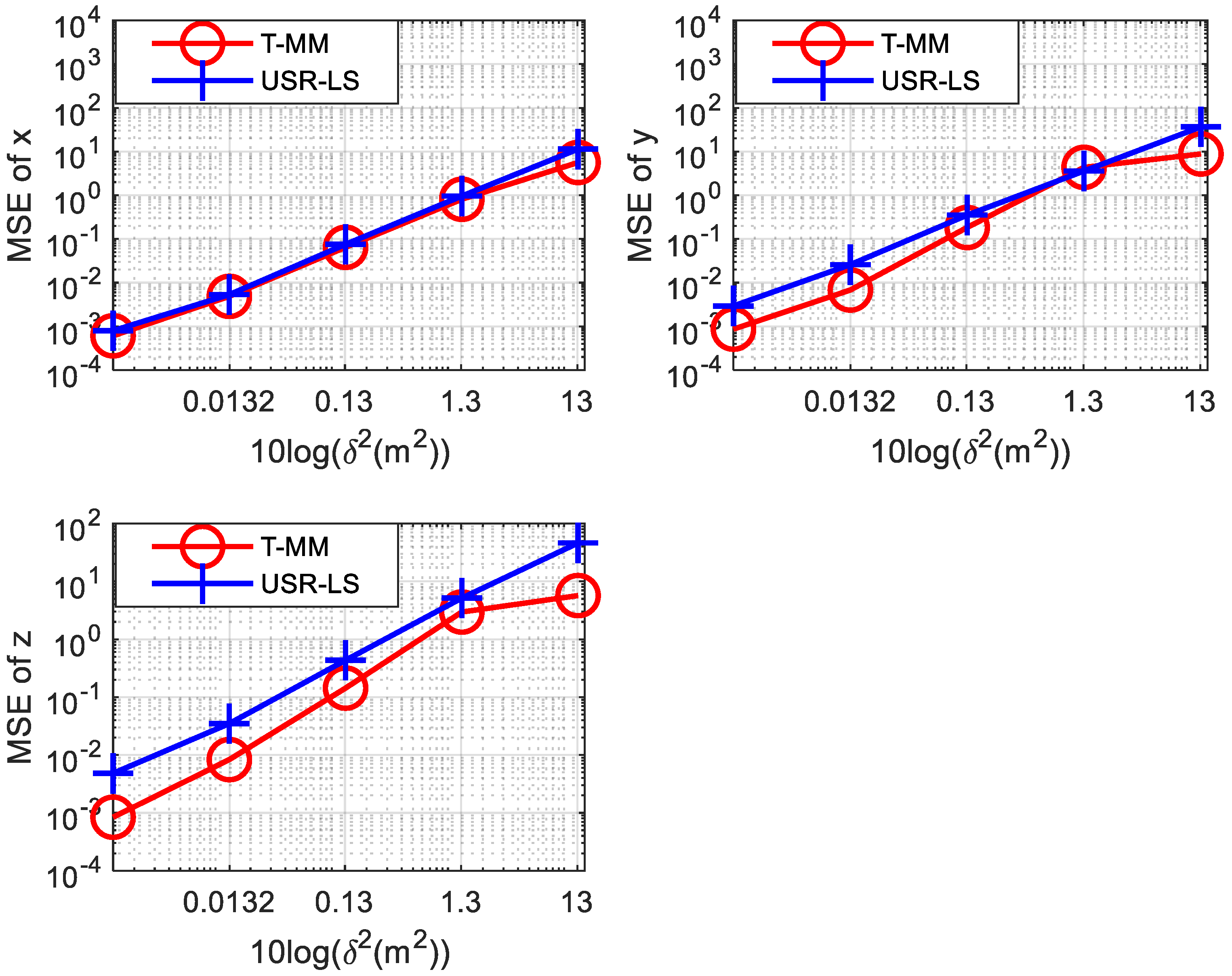
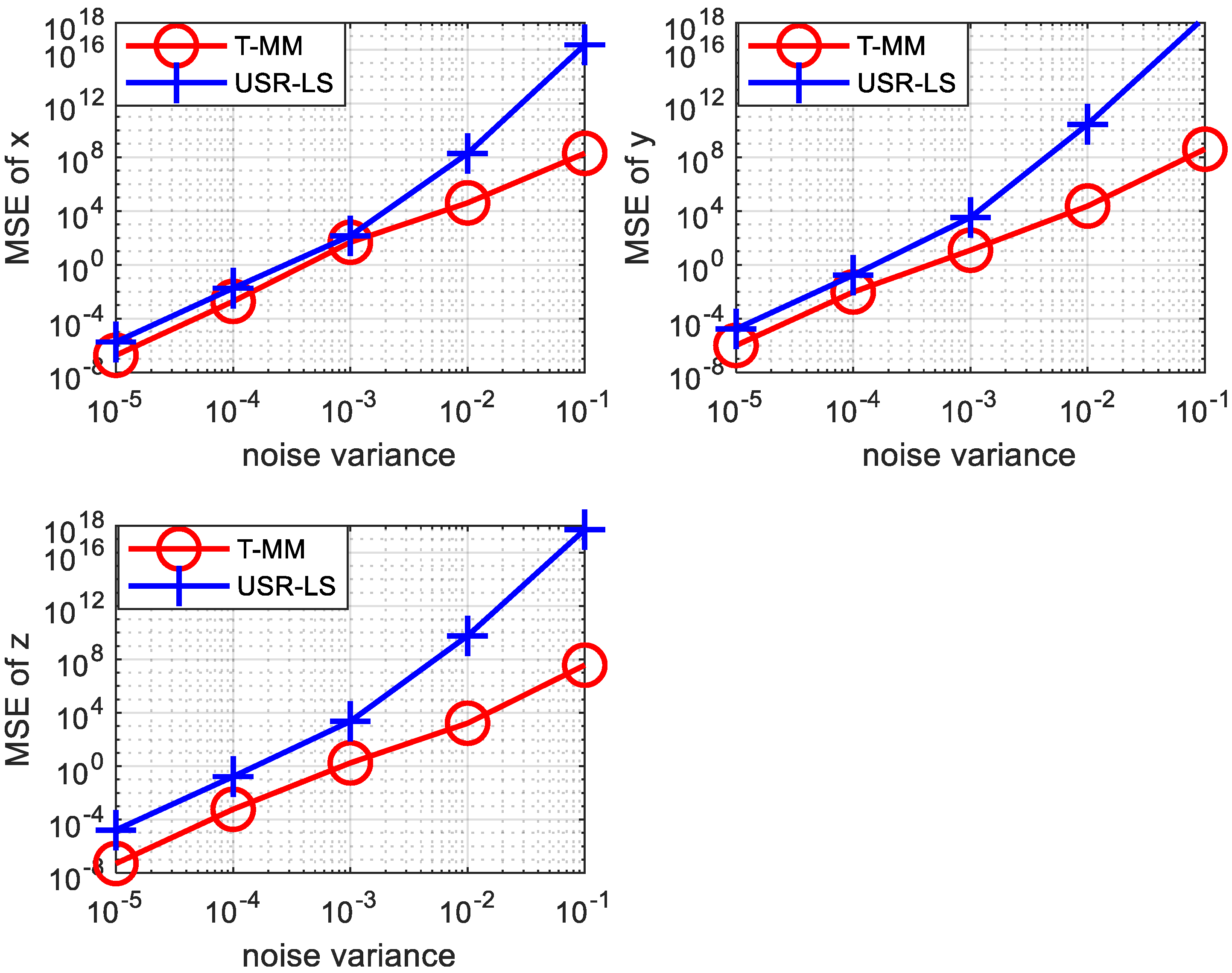
In a 3-dimensional scenario, the location information of the target sound source is a 3-dimensional vector. Similar to the 2-dimensional scenario, we also simulated underwater positioning in a 3-dimensional scenario scene. Since we need to calculate the three-dimensional information of the target sound source, we need more sensors. In the simulation we use seven sensors for 3D scene. Their coordinates are set to be
. Then the position of the target is set to be
. Other simulation settings are the same as in the 2-dimensional case mentioned above. As shown in
Figure 7, we calculated the MSE of the acoustic source’s abscissa, ordinate, and vertical coordinate under the two algorithms, respectively. It can be seen from the three sub-graphs that the MSE of the T-MM algorithm is always smaller than the MSE of the USR-LS in the 3D scenario. In other words, the T-MM is superior to USR-LS.
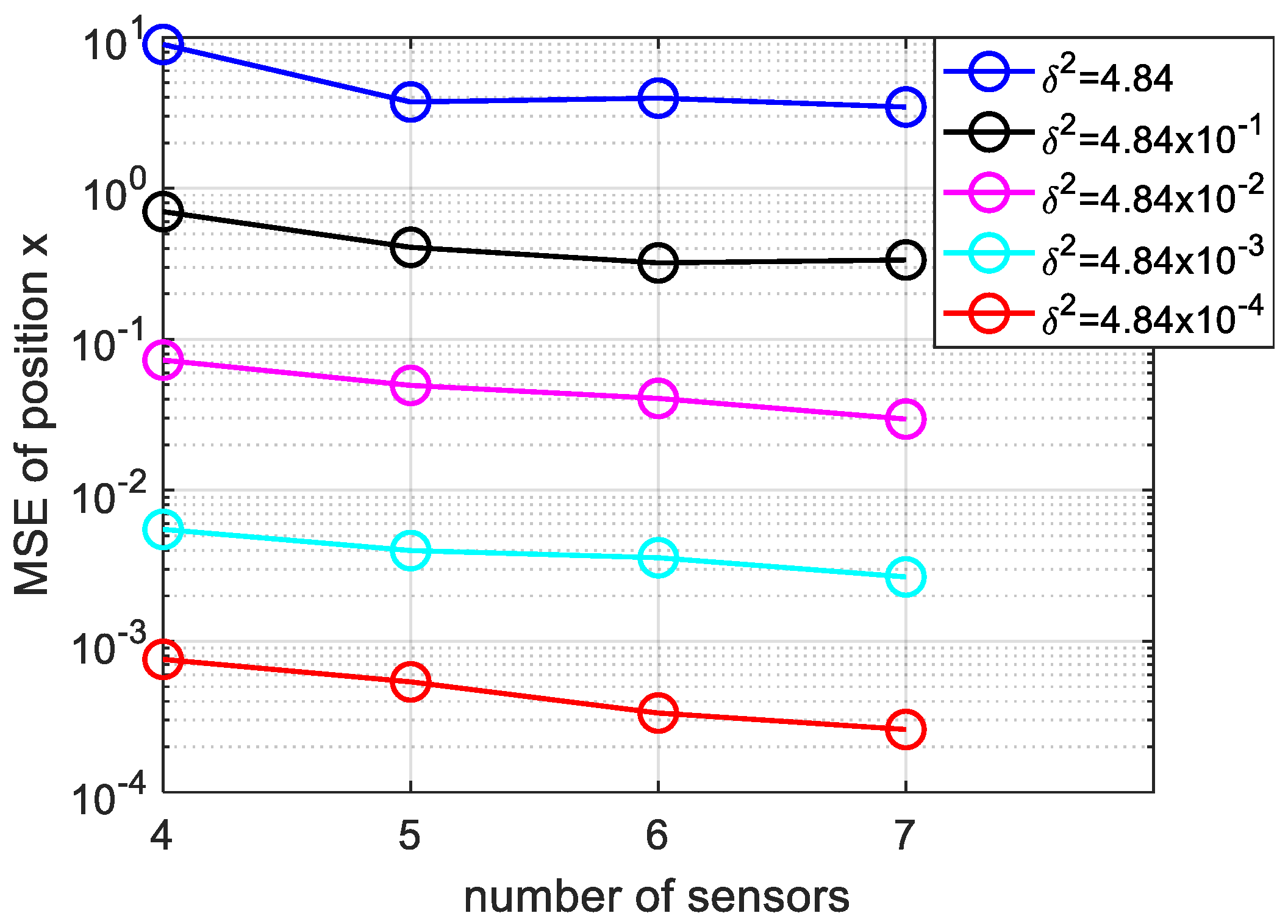
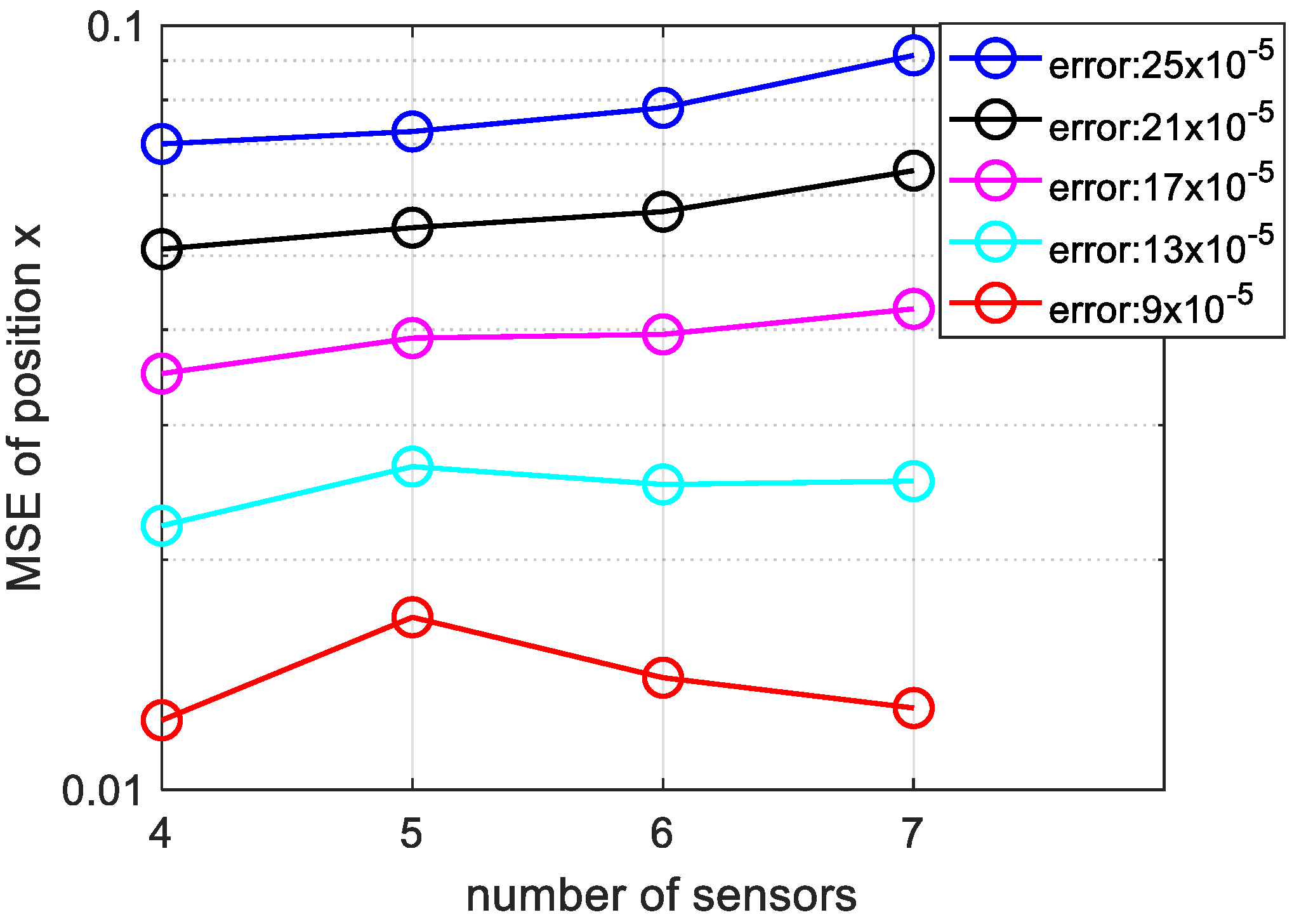
Next, we have studied the influence of the number of underwater sensors on location accuracy. We analyzed the effect of positioning accuracy when the number of sensors is m = 4, 5, 6, 7 respectively.
Figure 8, shows that, with increasing the number of underwater sensors, the localization accuracy is improved. It is obvious, from the TDOA principles, the larger the number of sensors means more hyperbola and accurate positioning. From another point of view, the increase in sensors means that we obtain more information about the acoustic source, so the positioning accuracy improved and in practical UASNs, the number of sensor nodes can reach hundreds.
6.2. Experiment 2: Bellhop Underwater Channel Model
In order to verify the feasibility of the proposed T-MM acoustic-based localization over the underwater acoustic channel, in this subsection, we use the bellhop model which closer to the actual underwater environment for simulation. The bellhop model uses the Gaussian beam tracking method to calculate the sound field in a horizontal non-uniform environment, which can be used to simulate the underwater environment. The underwater environment parameter settings for the bellhop underwater acoustic channel used in this paper are listed in
Table 2.
In the setting of environmental parameters above, the density of water column is 1021 /, which is the density of sea water in summer. The density of bottom halfspace means that sound velocity of the sediment layer is 1810 /.
Then we use the bellhop model to reproduce
Figure 4,
Figure 7 and
Figure 8 as follows. As shown in
Figure 9, even under the bellhop underwater acoustic model, the performance of the algorithm proposed in this paper is still better than the traditional TDOA positioning algorithm. The unit of abscissa in
Figure 9 is
and so on. Moreover, it can be inferred from
Figure 10 that the algorithm proposed in this paper is suitable for underwater 3D localization, and its positioning performance is better than USR-LS. From the red and cyan lines in
Figure 11, it can be seen that the positioning performance trends to improve with the increase of the number of sensors. The unit of error is seconds. However, when the noise is relatively large, a small increase in the number of sensors does not improve the performance of the algorithm according to purple, black and blue line in
Figure 11. This is because noise error plays a major role. But if we increase the number of sensors, the positioning performance will be improved, as shown by the red line in
Figure 11.
7. Conclusions
In this paper, we studied the problem of acoustic source localization in the underwater environment. We have investigated many kinds of literature about underwater acoustic sensor networks, positioning, and optimization algorithms. Regarding the particularity of the underwater environment, most positioning algorithms are used directly under the water, which causes a relatively large positioning error. Therefore, this paper firstly uses the TDOA algorithm and then uses the MM algorithm to optimize the obtained results to achieve the purpose of improving location accuracy. We also derived the SPEB’s mathematical expression for positioning problems that give the best expectations of unbiased estimation. The proposed T-MM algorithm has also been verified by simulation compared to the SPEB. The proposed T-MM is suitable for short-range scenarios, so we can assume that the propagation of the acoustic signal is a line of sight communication. However, in the actual situation, the propagation of acoustic signals underwater is a curve. So, to deal with that, in the future we plan to study the correction of sound rays based on the T-MM algorithm to improve the localization accuracy in field measurements. Simulation experiments were carefully conducted to test our proposed T-MM localization scheme using a statistical underwater acoustic channel model as well as the bellhop underwater channel model simulated channels. Both the statistical underwater acoustic channel model and the bellhop underwater channel model simulation results show that the proposed T-MM has better localization accuracy than the conventional acoustic-based underwater localization schemes.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}