Energy-Efficient UAVs Deployment for QoS-Guaranteed VoWiFi Service


Abstract
1. Introduction
1.1. Motivation
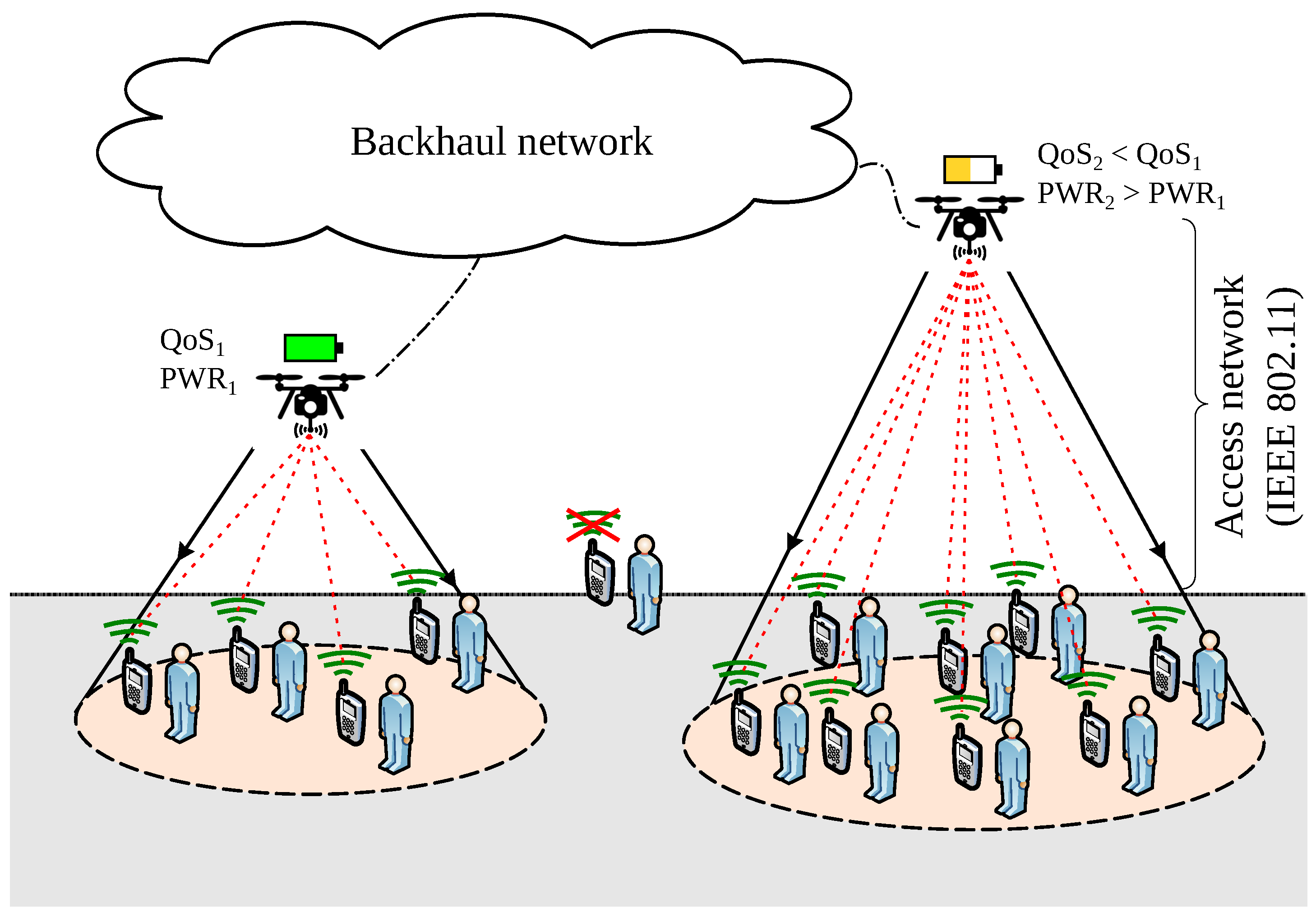
- Besides coverage, the multi-UAV 3D optimal placement has to consider VoWiFi speech quality for which the mac-sublayer of the communication protocol is crucial. To the best of our knowledge, the only work that has considered this factor [12] sets the focus only in minimizing the number of UAVs deployed (among solutions with a similar number of drones, the one that extended the battery life of served users was chosen) disregarding energy efficiency in UAVs.
- The number of UAVs required for the mission depends not only on the UAVs initially deployed but also on the number of UAVs launched to replace those in battery exhaustion. Thus, besides minimizing the number of UAV initially deployed, we should also seek the placement that maximizes the UAVs operation lifespan, considering UAV communication and mechanical energy.
- Long-duration events should consider users’ mobility. So besides the initial 3D placement, there should be a method in place so that UAVs dynamically relocate themselves for service continuity.
1.2. Contribution of This Paper
- We mathematically formulate a new UAV optimal deployment problem that accounts for UAVs turnover rate, coverage, and quality of service.
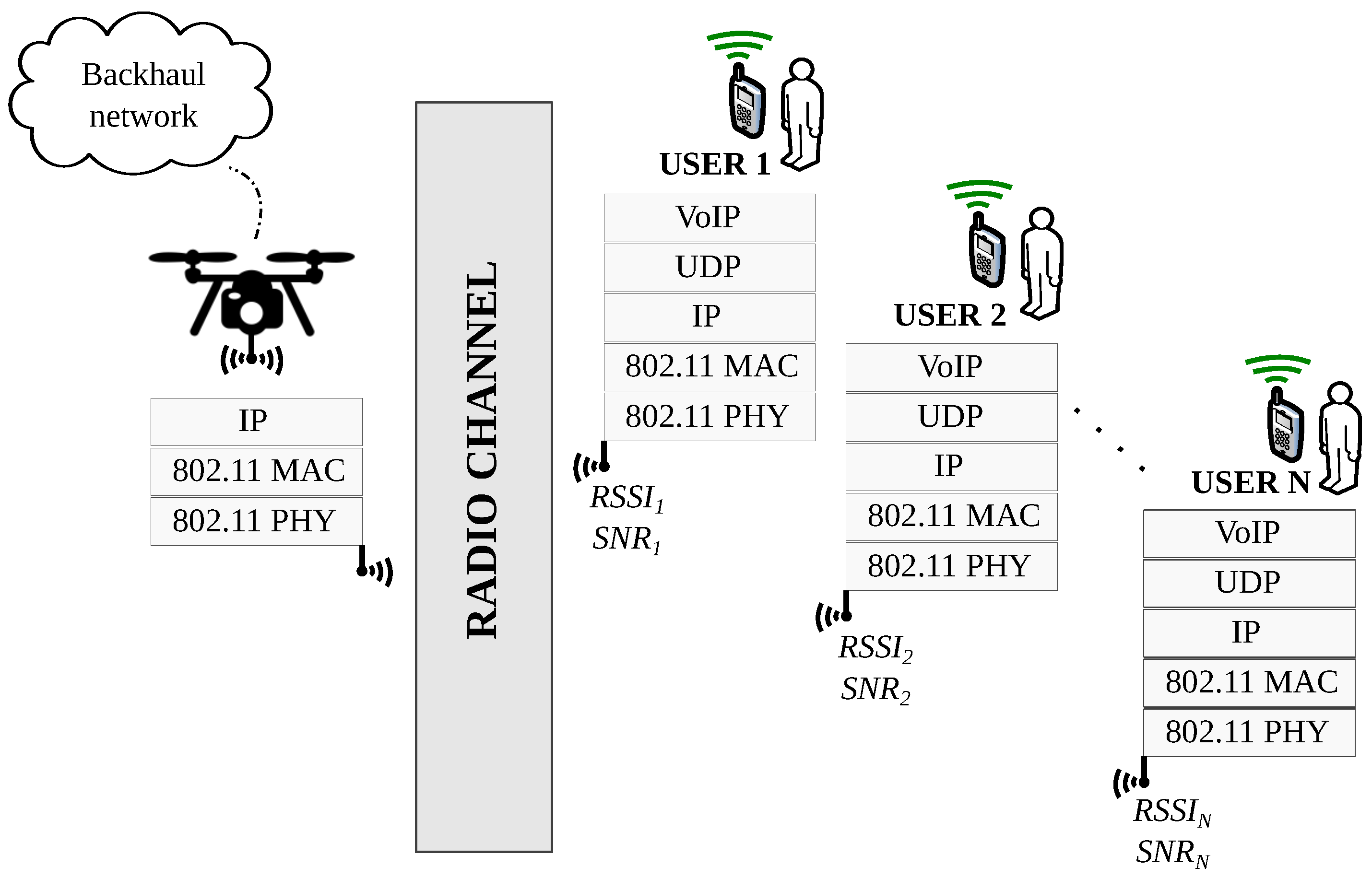
- We provide an analytical model that predicts the speech quality in a IEEE 802.11 WLAN for a set of VoIP traffic sources.
- We provide an analytical model that predicts UAV energy expenditure due to wireless communications. This information is used along with flight energy consumption to predict UAVs endurance.
- We solve the UAV optimal deployment problem using well-known heuristic methods such as genetic algorithm and particle swarm optimization.
2. Related Works
3. QoS and UAVs Endurance in VoWiFi Networks
3.1. Modeling QoS in VoWiFi
- represents a combination between impairment equipment parameter at zero packet loss (), and a function that depends on , the packet loss rate, and packet loss behaviour. is a codec-dependent constant associated with codec compression degradation (a list of values from ITU-T codecs were presented in ITU-T Rec. G.113 Appendix I), represents the codec packet loss robustness, which also has a specific value for each codec (listed in ITU-T Rec. G117 Appendix I), represents the packet loss rate (in %) in the WiFi channel and finally characterizes the burst ratio (i.e., equals 1 if packet loss if random and greater otherwise). In this paper, we use the G.711 codec ( and ) and assume random losses (i.e., ).
- accounts for impairments associated with the delay in the communication chain. A widely accepted approximation for can be obtained from one-way delay in the communication path d, where H is the Heaviside function ( for and for . In our case ). The one-way delay d (in milliseconds) includes the delay in the WiFi network plus 20 ms for the packetization interval of the codec.
3.2. Modeling UAV Endurance
4. Problem Statement
4.1. Terminology and Assumptions
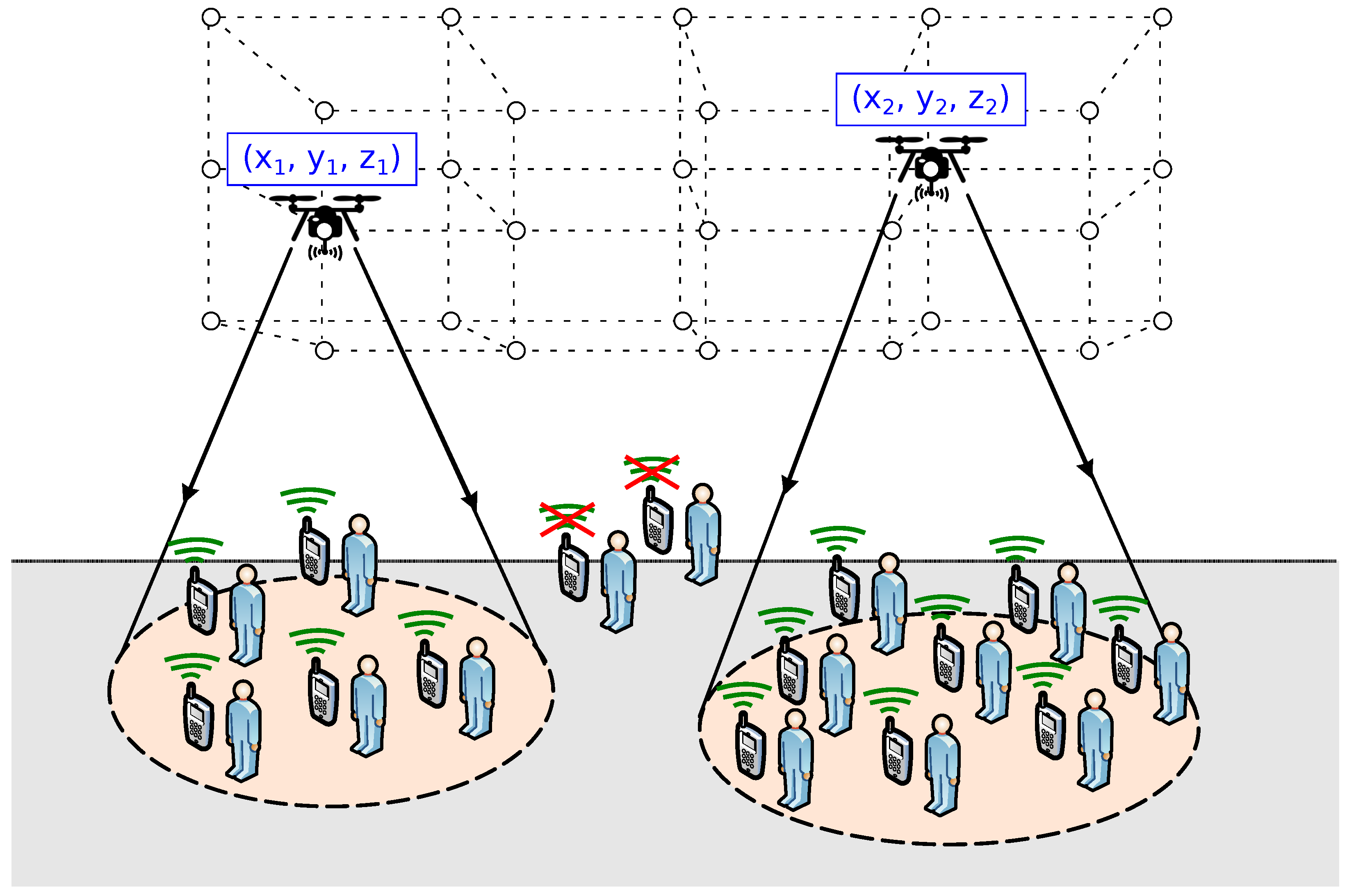
- Drones are denoted by the set . Their location is given by the set , where represents the three-dimensional coordinates of drone i.
- Ground users are denoted by the set . Their location is given by , where represents the coordinates of user k.
- The subset of users (i.e., WiFi clients) associated to the AP installed at drone is denoted by . Thus, the number of ground users covered is given by .
- represents the expected speech quality level (from 0 to 100) for users associated to the AP installed at drone .
- is the expected flight duration for drone i (see Equation (7), UAV’s endurance). The average flight duration of the set of UAVs deployed, , is:
- The terrain has known dimensions, and it is an open area.
- The number of drones available for the initial deployment has an upper bound .
- Ground users have a smartphone with a compatible VoIP application installed (i.e., using a known codec).
- User positions are known. This assumption is commonly found in literature and could be implemented through user’s smartphone’s GPS or image processing.
- APs’ channelization is arranged in such a manner that interferences between adjacent radio channels are negligible.
4.2. Problem Definition
5. Solving a Pseudo-Static Scenario
5.1. Search Algorithm: GA
| Algorithm 1: GA-based search pseudocode. |
 |
5.2. Checking the Fitness of Individuals: Check Function
| Algorithm 2: Check function pseudocode. |
 |
5.2.1. Signal Coverage Evaluation (Associate Function)
UAV-to-Ground Channel Model
Obtaining RSSI and SINR
5.2.2. Quality of Service Evaluation (QoS_eval Function)
5.2.3. Endurance Evaluation (Endurance_eval function)
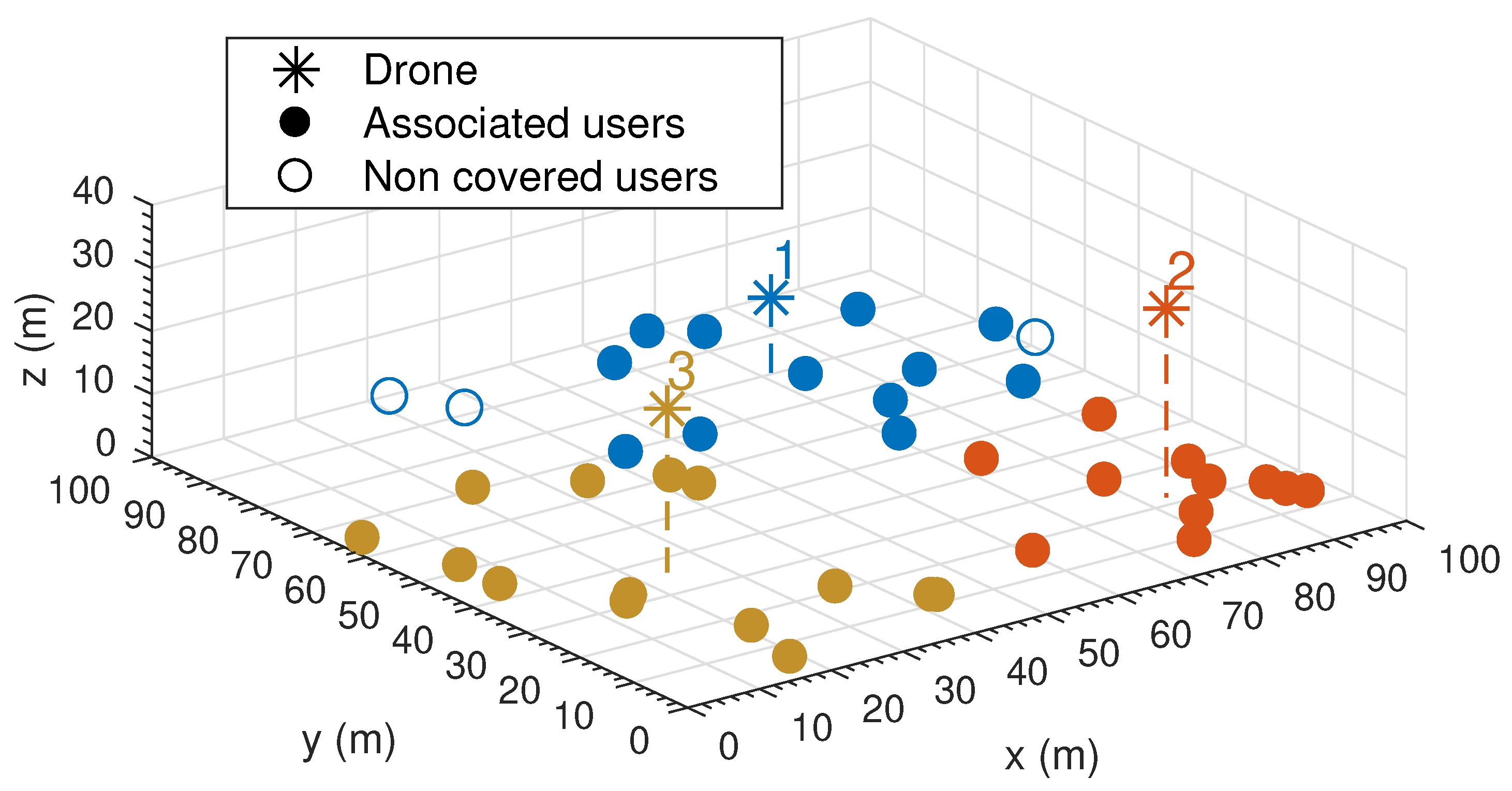
5.3. Example Solution
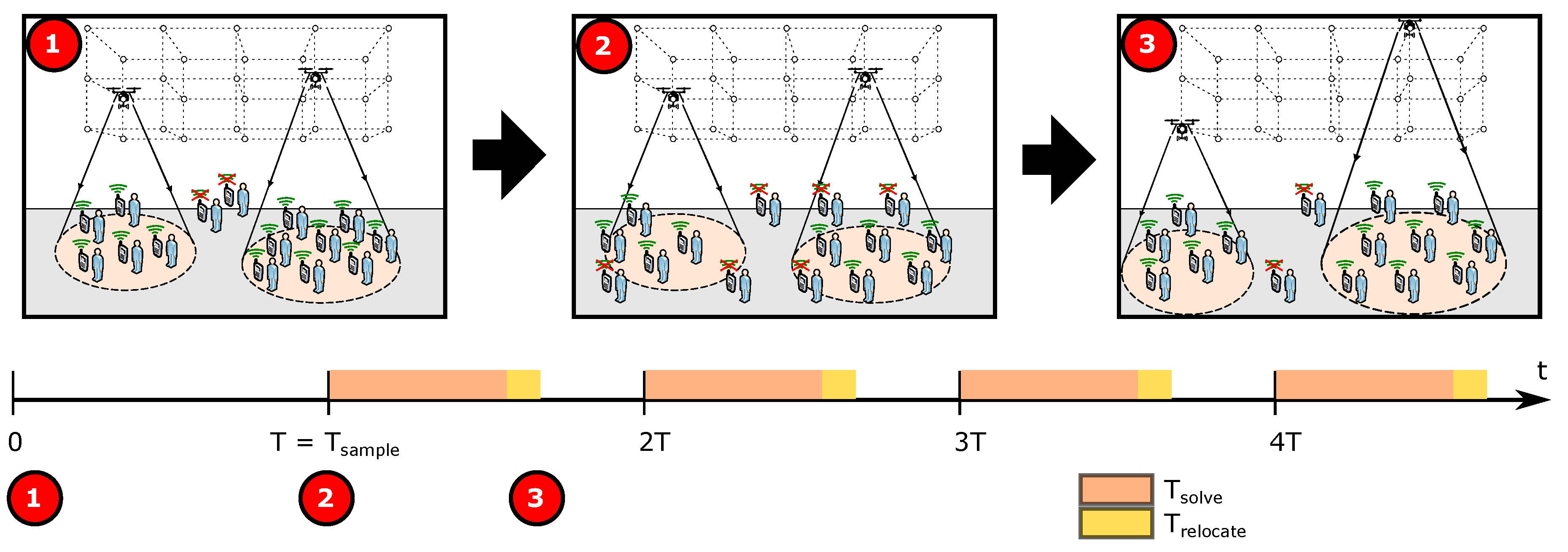
6. Solving a Dynamic Scenario
- The time required to solve the problem, , which in turn depends on the performance of the algorithm used to find the solution to the problem.
- The time required to relocate UAVs, , which depends on the distance traveled by UAVs and their speed. Small UAVs typically travel at speeds below 15 m/s [30].
6.1. Periodical Search Algorithm: PSO
| Algorithm 3: PSO-based search pseudocode. |
 |
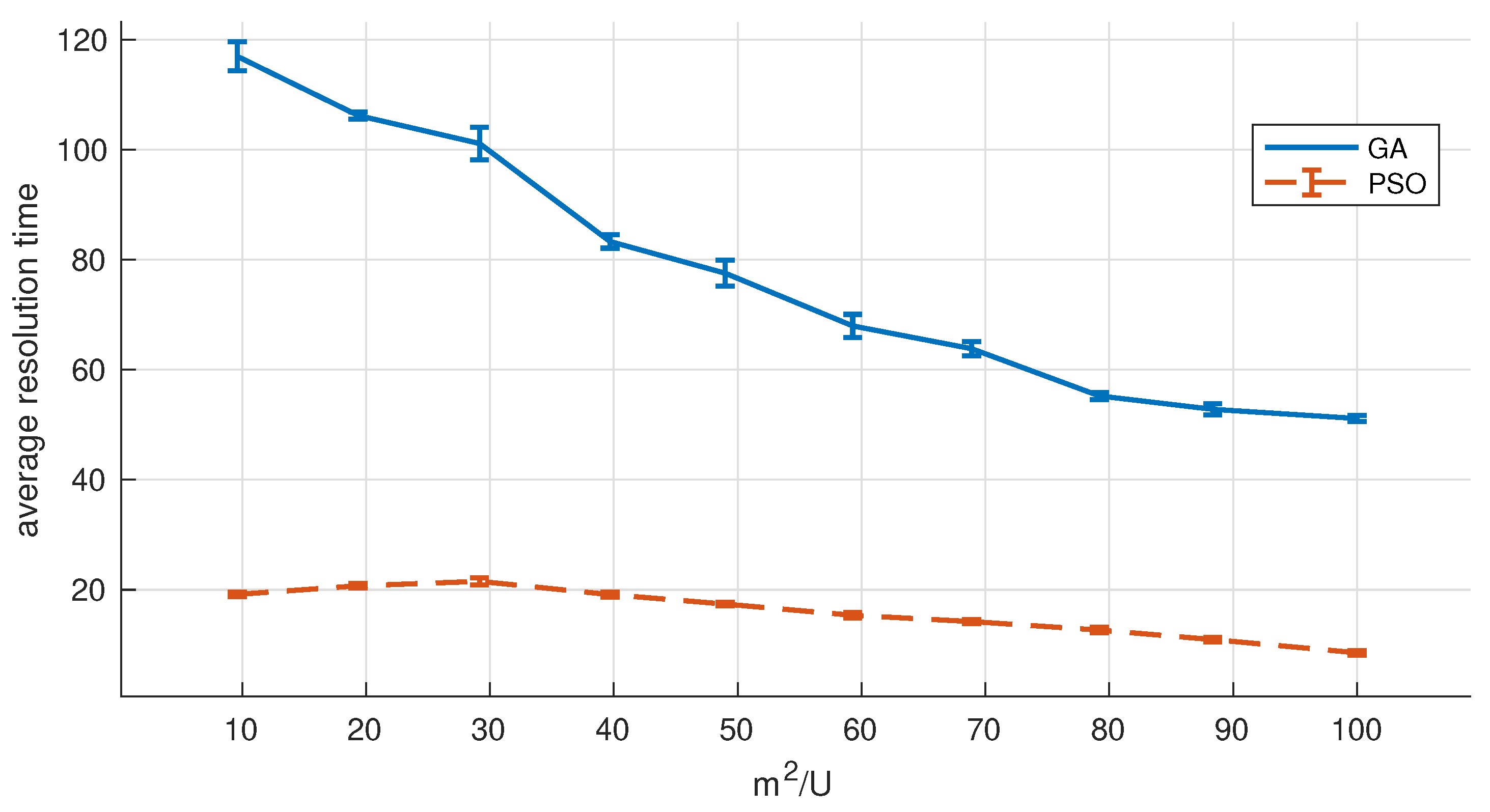
6.2. Convergence Speed
7. Numerical Results
- Individual VoIP channels. Each ground user has an independent bidirectional VoIP channel.
- Broadcast channel. Every ground user receives a single shared unidirectional VoIP flow.
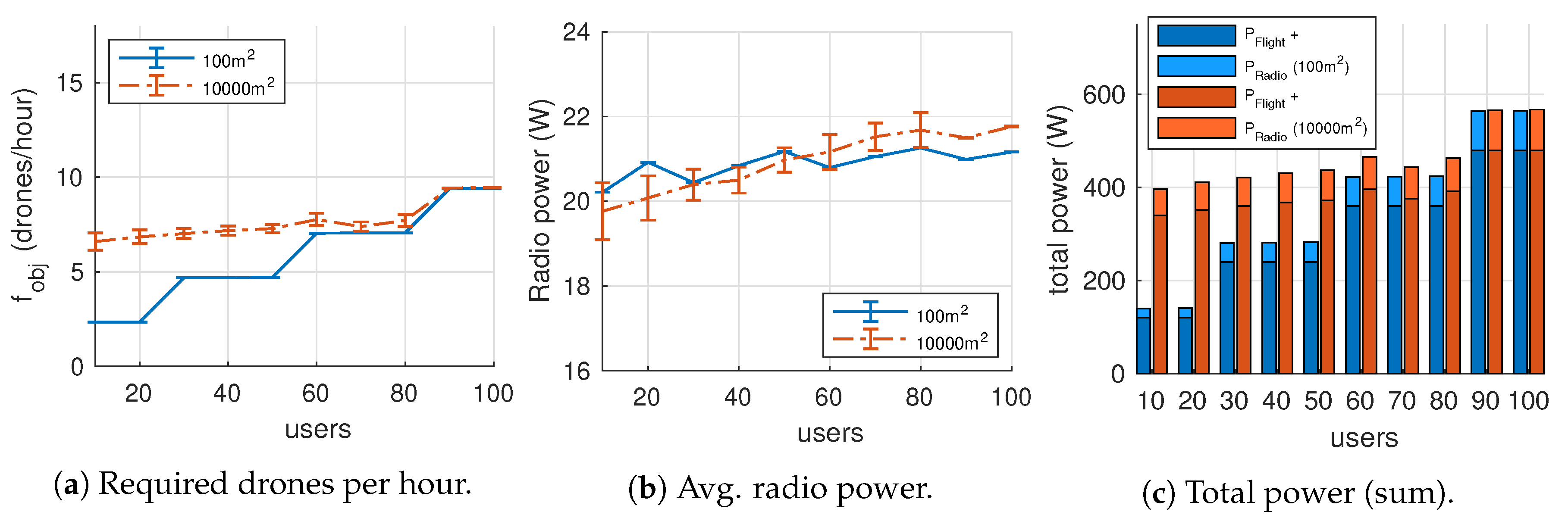
7.1. Individual VoIP Channels
- For less than 50 users, drones spend more radio power in the smaller scenario than in the larger one. This can be explained as follows: while in the bigger scenario up to users can be excluded from coverage by locating drones far away from them, the smaller one has not enough terrain for the drones to exclude people (), which in turn increases the average number of users associated to each aerial AP.
- For more than 50 users, the previous behaviour gets inverted when the user density is high enough. This is attributable to solutions where drones are placed at higher altitudes. In general, drones increase their altitude to cover a larger area (i.e., antenna directivity), which in turn reduces the received signal strength and the achievable data bit-rate (i.e., a slower MCS is selected), so the time to complete data transmission is longer which translates into higher energy consumption.
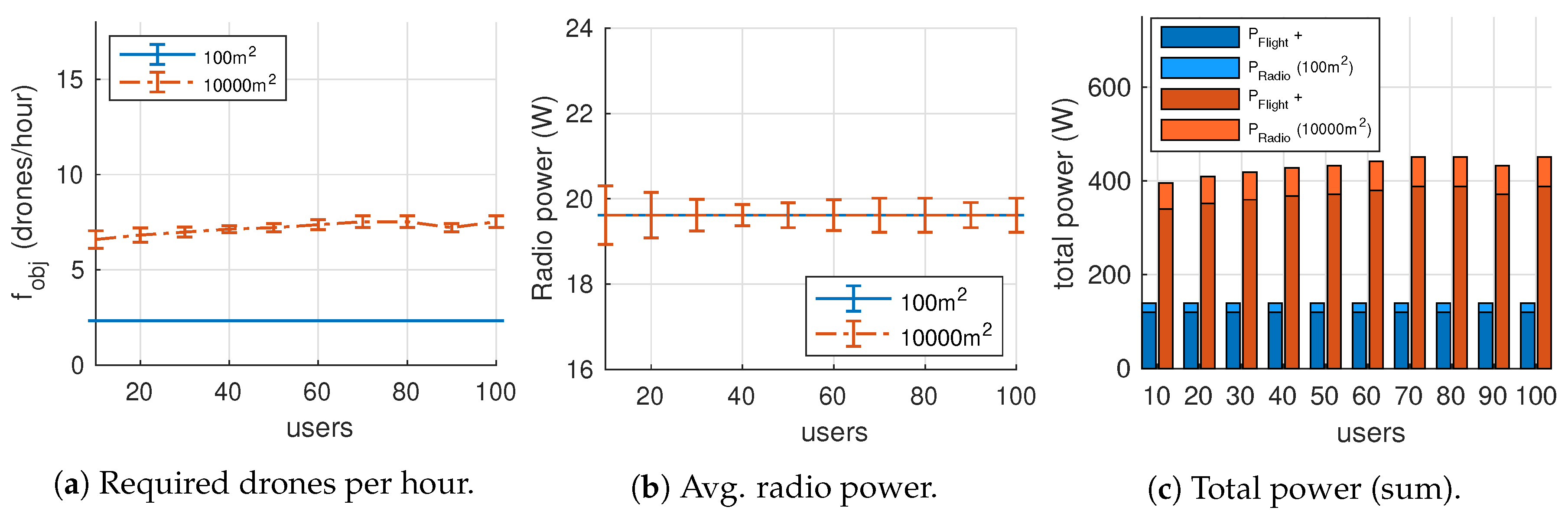
7.2. Broadcast Channel
7.3. Comparing with Other Approaches
- Our previous work [12] for optimal 3D placement in search and rescue missions. This GA-based search algorithm is the only related work that has comparable constraints (i.e., speech quality in WiFi) although the objective function is not the same and does not model UAVs endurance (see Table 1 for details).
8. Conclusions and Future Research
Author Contributions
Funding
Conflicts of Interest
Appendix A. Consumption Events on WiFi
- One individual VoIP bi-directional channel per station:
- One unique broadcast channel:
Appendix B. Genetic Algorithm Implementation
Appendix B.1. Individuals
Appendix B.2. Algorithm Steps
- Initial population. An initial collection of p individuals is created (the population size p also affects convergence and performance. Experimentally, we found that provided results that could not be improved in the scenarios tested).
- Evaluation. Each individual from the current generation is evaluated (and scored) based on the objective function of the problem Equation (9).
- Selection. A collection of parents is selected from the current generation based on their score and rank, so best individuals are more prone to be chosen as parents.
- Next generation. This step slightly differs from the canonical GA by distinguishing between three different sources of individuals. However, convergence is improved according to [50,51].
- Elite individuals. Best 5% individuals from current generation are preserved to the new generation.
- The remaining population (95%) is created as follows:
- -
- Self-reproduction and Mutation (GA_SRM). 20% of the remaining population is created by directly applying a random mutation with probability over selected parents.
- -
- Crossover-and-Mutation (GA_CM). The rest (80%) is created by combining the genes of two parents (crossover) and applying a mutation to these new individuals with probability .
- Exit criteria: in our implementation, the algorithm ends when the score of the best individual found could not be improved after consecutive generations (observe that has a great impact on performance and convergence. Experimentally, we have found that is a good balance between performance and precision) by . Otherwise, the algorithm returns to step 2.
Appendix B.3. Creating the Initial Population (GA_InitialPopulation)
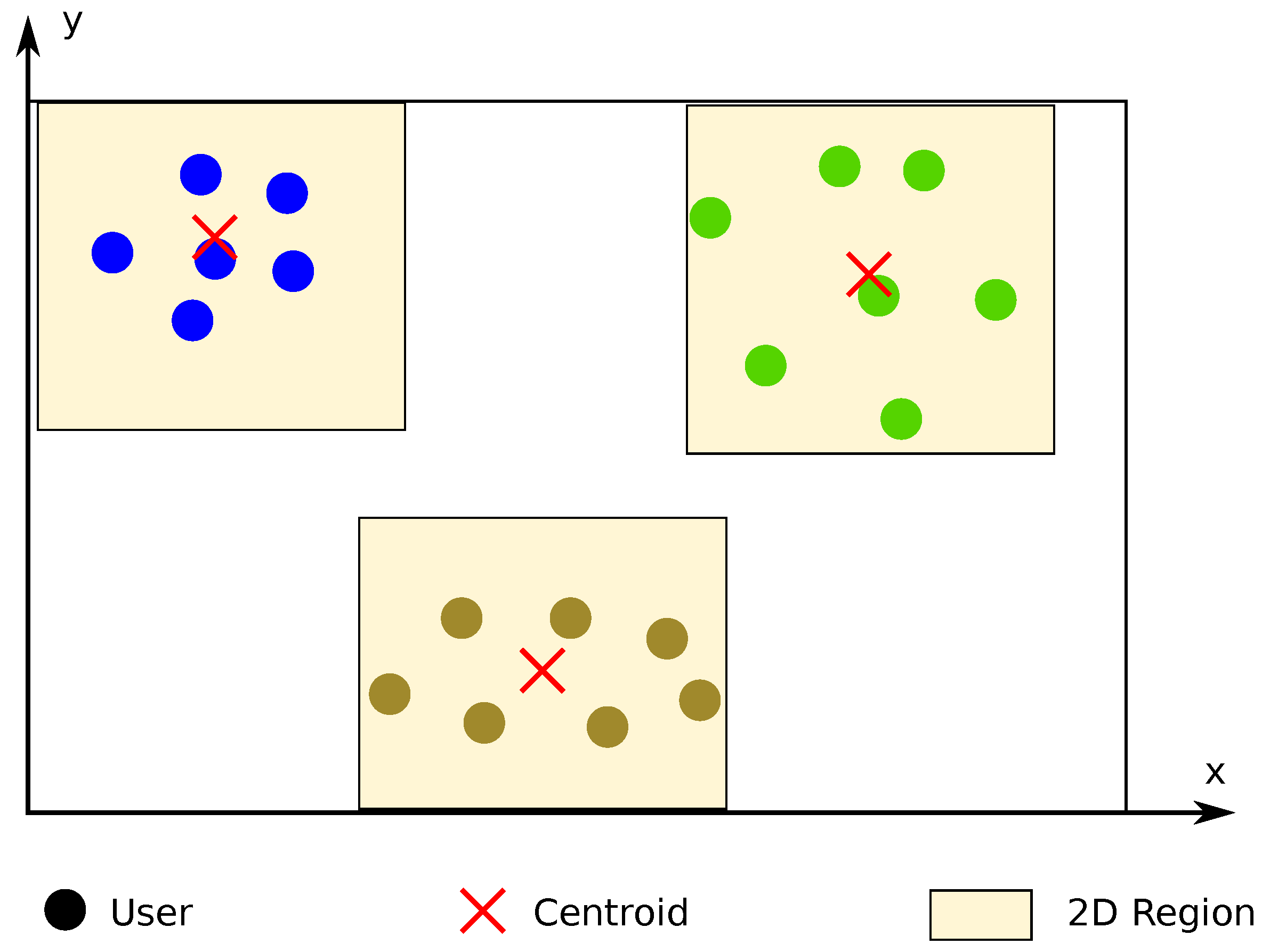
- First, we apply a two-dimensional k-means algorithm, as illustrated in Figure A1, to define D clusters so that the average distance from each user to its closest centroid is minimized.
- Then, we convert the 2D centroids to 3D ones by initializing the height coordinate to the mean altitude of the grid. These centroids will represent the first individual.
- Finally, the rest of the initial population ( individuals) is created by randomly placing each drone (of each individual) among the spatial regions we created around each centroid. In particular, each region is a 3D cube that represents the D-th part of the grid volume.

Appendix B.4. Operators
- Evaluation and ranking: the quality of the individuals must be evaluated to distinguish between good and bad candidates. First, each individual is scored by evaluating the objective function in Equation (9), resulting in a raw fitness score. Then, solutions are ranked according to their raw fitness score. Those individuals that do not meet the problem constraints are penalized so that they are placed at the tail of the ranking according to the ratio of users that meet the constraints. Finally, if an individual is in the n position in the ranking, it is assigned a new scored termed expectation value of .
- Parent selection: parents are selected through a stochastic uniform selection process among individuals, according to their expectation value. For example, for individuals, 342 parents ( for CM operations plus 38 for SRM) are selected. By applying the proposed selection method, best individuals may be chosen multiple times as parents.
- Mutation: this operator consists of replacing genes of an individual for random coordinates within with probability or for SRM and CM, respectively.
- Crossover: this operator randomly combines the genes of two parents to create a new individual.
Appendix C. Particle Swarm Optimization Implementation
Appendix C.1. Algorithm Steps
- It chooses new velocities, based on the current velocity, particles’ best location and the global best location.
- It obtains a candidate new position for each particle (i.e., function PSO_UpdateParticle), considering the its best known location and its velocity.
- It evaluates each particle, and determines the best known function value and its position.
- It updates particles’ and global best locations if improved.
Appendix C.2. Initializing the Swarm of Particles (PSO_InitSwarm)
Appendix C.3. Updating Particles (PSO_UpdateParticle)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Default Value | Range |
|---|---|---|
| and | – | |
| SelfAdjustmentWeight () | – | |
| SocialAdjustmentWeight () | – | |
| Inertia (W) |
References
- Clarke, R. Understanding the drone epidemic. Comput. Law Secur. Rev. 2014, 30, 230–246. [Google Scholar] [CrossRef]
- Al-Turjman, F.; Abujubbeh, M.; Malekloo, A.; Mostarda, L. UAVs assessment in software-defined IoT networks: An overview. Comput. Commun. 2020, 150, 519–536. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Morgenthaler, S.; Braun, T.; Zhao, Z.; Staub, T.; Anwander, M. UAVNet: A mobile wireless mesh network using unmanned aerial vehicles. In Proceedings of the Globecom Workshops (GC Wkshps), Anaheim, CA, USA, 3–7 December 2012; pp. 1603–1608. [Google Scholar]
- Aust, S.; Prasad, R.V.; Niemegeers, I.G. Outdoor long-range WLANs: A lesson for IEEE 802.11 ah. IEEE Commun. Surv. Tutor. 2015, 17, 1761–1775. [Google Scholar] [CrossRef]
- Alvissalim, M.S.; Zaman, B.; Hafizh, Z.A.; Ma’sum, M.A.; Jati, G.; Jatmiko, W.; Mursanto, P. Swarm quadrotor robots for telecommunication network coverage area expansion in disaster area. In Proceedings of the SICE Annual Conference (SICE), Akita, Japan, 20–23 August 2012; pp. 2256–2261. [Google Scholar]
- Motlagh, N.H.; Taleb, T.; Arouk, O. Low-altitude unmanned aerial vehicles-based internet of things services: Comprehensive survey and future perspectives. IEEE Internet Things J. 2016, 3, 899–922. [Google Scholar] [CrossRef]
- Erdelj, M.; Król, M.; Natalizio, E. Wireless sensor networks and multi-UAV systems for natural disaster management. Comput. Netw. 2017, 124, 72–86. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Charfi, E.; Chaari, L.; Kamoun, L. New adaptive frame aggregation call admission control (AFA-CAC) for high throughput WLANs. Trans. Emerg. Telecommun. Technol. 2015, 26, 469–481. [Google Scholar] [CrossRef]
- Wu, H.T.; Yang, M.H.; Ke, K.W. The design of QoS provisioning mechanisms for wireless networks. In Proceedings of the 8th IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), Mannheim, Germany, 29 March–2 April 2010; pp. 756–759. [Google Scholar]
- Mayor, V.; Estepa, R.; Estepa, A.; Madinabeitia, G. Deploying a Reliable UAV-Aided Communication Service in Disaster Areas. Wirel. Commun. Mob. Comput. 2019. [Google Scholar] [CrossRef]
- Shin, S.; Schulzrinne, H. Measurement and Analysis of the VoIP Capacity in IEEE 802.11 WLAN. IEEE Trans. Mobile Comput. 2009, 8, 1265–1279. [Google Scholar] [CrossRef]
- Kim, W.; Song, T.; Kim, T.; Park, H.; Pack, S. VoIP capacity analysis in full duplex WLANs. IEEE Trans. Veh. Technol. 2017, 66, 11419–11424. [Google Scholar] [CrossRef]
- Dini, P.; Font-Bach, O.; Mangues-Bafalluy, J. Experimental analysis of VoIP call quality support in IEEE 802.11 DCF. In Proceedings of the 2008 6th International Symposium on Communication Systems, Networks and Digital Signal Processing, Graz, Austria, 25–25 July 2008; pp. 443–447. [Google Scholar]
- Cai, L.X.; Shen, X.; Mark, J.W.; Cai, L.; Xiao, Y. Voice capacity analysis of WLAN with unbalanced traffic. IEEE Trans. Veh. Technol. 2006, 55, 752–761. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient Deployment of Multiple Unmanned Aerial Vehicles for Optimal Wireless Coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement optimization of UAV-mounted mobile base stations. IEEE Commun. Lett. 2016, 21, 604–607. [Google Scholar] [CrossRef]
- Shakoor, S.; Kaleem, Z.; Baig, M.I.; Chughtai, O.; Duong, T.Q.; Nguyen, L.D. Role of UAVs in public safety communications: Energy efficiency perspective. IEEE Access 2019, 7, 140665–140679. [Google Scholar] [CrossRef]
- Zhang, X.; Duan, L. Fast Deployment of UAV Networks for Optimal Wireless Coverage. IEEE Trans. Mobile Comput. 2018, 18, 588–601. [Google Scholar] [CrossRef]
- Zorbas, D.; Pugliese, L.D.P.; Razafindralambo, T.; Guerriero, F. Optimal drone placement and cost-efficient target coverage. J. Netw. Comput. Appl. 2016, 75, 16–31. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Azari, M.M.; Rosas, F.; Chen, K.C.; Pollin, S. Joint sum-rate and power gain analysis of an aerial base station. In Proceedings of the 2016 IEEE Globecom Workshops (GC Workshops), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Chou, S.F.; Yu, Y.J.; Pang, A.C.; Lin, T.A. Energy-Aware 3D Aerial Small-Cell Deployment over Next Generation Cellular Networks. In Proceedings of the 2018 IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–5. [Google Scholar]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef]
- Wang, L.; Hu, B.; Chen, S. Energy efficient placement of a drone base station for minimum required transmit power. IEEE Wirel. Commun. Lett. 2018. [Google Scholar] [CrossRef]
- Mulgaonkar, Y.; Whitzer, M.; Morgan, B.; Kroninger, C.M.; Harrington, A.M.; Kumar, V. Power and weight considerations in small, agile quadrotors. In Micro-and Nanotechnology Sensors, Systems, and Applications VI; International Society for Optics and Photonics: Bellingham, DC, USA, 2014; Volume 9083, p. 90831Q. [Google Scholar] [CrossRef]
- Di Franco, C.; Buttazzo, G. Energy-aware coverage path planning of UAVs. In Proceedings of the 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, Vila Real, Portugal, 8–10 April 2015; pp. 111–117. [Google Scholar]
- Leishman, G.J. Principles of Helicopter Aerodynamics with CD Extra; Cambridge University Press: New York, NY, USA, 2006. [Google Scholar]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV cellular communications: Practical aspects, standardization advancements, regulation, and security challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef]
- Iellamo, S.; Lehtomaki, J.J.; Khan, Z. Placement of 5G drone base stations by data field clustering. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile unmanned aerial vehicles (UAVs) for energy-efficient Internet of Things communications. IEEE Trans. Wirel. Commun. 2017, 16, 7574–7589. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Drone small cells in the clouds: Design, deployment and performance analysis. In Proceedings of the Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Košmerl, J.; Vilhar, A. Base stations placement optimization in wireless networks for emergency communications. In Proceedings of the 2014 IEEE International Conference on Communications Workshops (ICC), Sydney, Australia, 10–14 June 2014; pp. 200–205. [Google Scholar]
- Kalantari, E.; Yanikomeroglu, H.; Yongacoglu, A. On the number and 3D placement of drone base stations in wireless cellular networks. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–6. [Google Scholar]
- Bor-Yaliniz, I.; Yanikomeroglu, H. The new frontier in RAN heterogeneity: Multi-tier drone-cells. IEEE Commun. Mag. 2016, 54, 48–55. [Google Scholar] [CrossRef]
- Merwaday, A.; Guvenc, I. UAV assisted heterogeneous networks for public safety communications. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), New Orleans, LA, USA, 9–12 March 2015; pp. 329–334. [Google Scholar]
- Alzenad, M.; El-Keyi, A.; Yanikomeroglu, H. 3-D placement of an unmanned aerial vehicle base station for maximum coverage of users with different QoS requirements. IEEE Wirel. Commun. Lett. 2018, 7, 38–41. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Optimal transport theory for power-efficient deployment of unmanned aerial vehicles. In Proceedings of the 2016 IEEE international conference on communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–6. [Google Scholar]
- Rohde, S.; Putzke, M.; Wietfeld, C. Ad hoc self-healing of OFDMA networks using UAV-based relays. Ad Hoc Netw. 2013, 11, 1893–1906. [Google Scholar] [CrossRef]
- Galkin, B.; Kibilda, J.; DaSilva, L.A. Deployment of UAV-mounted access points according to spatial user locations in two-tier cellular networks. In Proceedings of the 2016 Wireless Days (WD), Toulouse, France, 23–25 March 2016; pp. 1–6. [Google Scholar]
- Zhang, Q.; Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Machine learning for predictive on-demand deployment of UAVs for wireless communications. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar]
- Ghazzai, H.; Ghorbel, M.B.; Kadri, A.; Hossain, M.J.; Menouar, H. Energy-efficient management of unmanned aerial vehicles for underlay cognitive radio systems. IEEE Trans. Green Commun. Netw. 2017, 1, 434–443. [Google Scholar] [CrossRef]
- Karapantazis, S.; Pavlidou, F.N. VoIP: A comprehensive survey on a promising technology. Comput. Netw. 2009, 53, 2050–2090. [Google Scholar] [CrossRef]
- ITU-T Recommendation G.107: The E-Model, a Computational Model for Use in Transmission Planning; Technical Report; International Telecommunication Union: Geneva, Switzerland, 2015; Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.103.3547 (accessed on 10 August 2020).
- Assem, H.; Malone, D.; Dunne, J.; O’Sullivan, P. Monitoring VoIP call quality using improved simplified E-model. In Proceedings of the 2013 International Conference on Computing, Networking and Communications (ICNC), San Diego, CA, USA, 28–31 January 2013; pp. 927–931. [Google Scholar]
- Mayor, V.; Estepa, R.; Estepa, A.; Madinabeitia, G. Unified call admission control in corporate domains. Comput. Commun. 2020, 150, 589–602. [Google Scholar] [CrossRef]
- Abdilla, A.; Richards, A.; Burrow, S. Power and endurance modelling of battery-powered rotorcraft. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 675–680. [Google Scholar]
- Mehboob, U.; Qadir, J.; Ali, S.; Vasilakos, A. Genetic algorithms in wireless networking: Techniques, applications, and issues. Soft Comput. 2016, 20, 2467–2501. [Google Scholar] [CrossRef]
- Aguirre, H.E.; Tanaka, K.; Sugimura, T. Cooperative model for genetic operators to improve GAs. In Proceedings of the 1999 International Conference on Information Intelligence and Systems, Bethesda, MD, USA, 31–October–3 November 1999; pp. 98–106. [Google Scholar]
- Aguirre, H.E.; Tanaka, K.; Sugimura, T.; Oshita, S. Improved distributed genetic algorithm with cooperative-competitive genetic operators. In Proceedings of the 2000 IEEE International Conference on Systems, Man, and Cybernetics, Nashville, TN, USA, 8–11 October 2000; Volume 5, pp. 3816–3822. [Google Scholar]
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 2898–2904. [Google Scholar]
- Feng, Q.; McGeehan, J.; Tameh, E.K.; Nix, A.R. Path loss models for air-to-ground radio channels in urban environments. In Proceedings of the 2006 IEEE 63rd Vehicular Technology Conference, Melbourne, Australia, 7–10 May 2006; Volume 6, pp. 2901–2905. [Google Scholar]
- Zheng, Y.; Wang, Y.; Meng, F. Modeling and simulation of pathloss and fading for air-ground link of HAPs within a network simulator. In Proceedings of the 2013 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery, Beijing, China, 10–12 October 2013; pp. 421–426. [Google Scholar]
- Taher, N.C.; Ghamri-Doudane, Y.; El Hassan, B.; Agoulmine, N. An efficient model-based admission control algorithm to support voice and video services in 802.11 e WLANs. In Proceedings of the GIIS’09—Global Information Infrastructure Symposium, Hammemet, Tunisia, 23–26 June 2009; pp. 1–8. [Google Scholar]
- Zhu, J.; Fapojuwo, A.O. A new call admission control method for providing desired throughput and delay performance in IEEE802. 11e wireless LANs. IEEE Trans. Wirel. Commun. 2007, 6, 701–709. [Google Scholar] [CrossRef]
- Pong, D.; Moors, T. Call admission control for IEEE 802.11 contention access mechanism. In Proceedings of the GLOBECOM’03—Global Telecommunications Conference, San Francisco, CA, USA, 1–5 December 2003; Volume 1, pp. 174–178. [Google Scholar]
- Zhao, Q.; Tsang, D.H.; Sakurai, T. Modeling nonsaturated IEEE 802.11 DCF networks utilizing an arbitrary buffer size. IEEE Trans. Mob. Comput. 2011, 10, 1248–1263. [Google Scholar] [CrossRef]
- Duffy, K.; Ganesh, A.J. Modeling the impact of buffering on 802.11. IEEE Commun. Lett. 2007, 11, 219–221. [Google Scholar] [CrossRef]
- Malone, D.; Duffy, K.; Leith, D. Modeling the 802.11 distributed coordination function in nonsaturated heterogeneous conditions. IEEE/ACM Trans. Netw. 2007, 15, 159–172. [Google Scholar] [CrossRef]
- Laddomada, M.; Mesiti, F.; Mondin, M.; Daneshgaran, F. On the throughput performance of multirate IEEE 802.11 networks with variable-loaded stations: Analysis, modeling, and a novel proportional fairness criterion. IEEE Trans. Wirel. Commun. 2010, 9, 1594–1607. [Google Scholar] [CrossRef]
- Duffy, K.R. Mean field Markov models of wireless local area networks. Markov Process. Relat. Fields 2010, 16, 295–328. [Google Scholar]
- Pei, G.; Henderson, T.R. Validation of ns-3 802.11b PHY Model; Technical Report; Boeing Research and Technology: Seattle, WA, USA, 2009; Available online: http://www.nsnam.org/~pei/80211b.pdf (accessed on 10 August 2020).
- Guangyu Pei, T.R.H. Validation of OFDM Error Rate Model in ns-3; Technical Report; Boeing Research and Technology: Seattle, WA, USA, 2010. [Google Scholar]
- Hassan, R.; Cohanim, B.; De Weck, O.; Venter, G. A comparison of particle swarm optimization and the genetic algorithm. In Proceedings of the 46th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Austin, TX, USA, 18–21 April 2005; p. 1897. [Google Scholar]
- Dengiz, B.; Altiparmak, F.; Smith, A.E. Local search genetic algorithm for optimal design of reliable networks. IEEE Trans. Evol. Comput. 1997, 1, 179–188. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Mezura-Montes, E.; Coello, C.A.C. Constraint-handling in nature-inspired numerical optimization: Past, present and future. Swarm Evol. Comput. 2011, 1, 173–194. [Google Scholar] [CrossRef]
- Pedersen, M.E.H. Good Parameters for Particle Swarm Optimization; Technical Report HL1001; Hvass Laboratory: Copenhagen, Denmark, 2010; pp. 1551–3203. [Google Scholar]









| Paper | Objective | Multi-UAV | UAV-to-Ground Technology | UAV Mechanical Power | UAV Radio Power | User Radio Power | Speech Quality Constraint |
|---|---|---|---|---|---|---|---|
| [26] | minimize transmit power | no | cellular | no | yes | no | no |
| [25] | maximize coverage with minimum transmit power | no | cellular | no | yes | no | no |
| [31] | maximize capacity and extend battery life of mobile users | yes | cellular | no | yes | yes | no |
| [32] | minimize transmit power of mobile users (deployment and mobility) | yes | cellular | no | no | yes | no |
| [22] | minimize number of UAVs | yes | cellular | no | no | no | no |
| [39] | minimize the total transmit power of the entire aerial system | yes | cellular | no | yes | no | no |
| [42] | minimize total power consumption given predicted traffic | yes | cellular | yes | yes | no | no |
| [43] | minimize total power consumption | yes | cognitive radio | yes | yes | no | no |
| [12] | minimize number of UAVs | yes | WiFi | no | no | yes | yes |
| this paper | minimize the ratio between the number of UAVs and UAVs’ endurance | yes | WiFi | yes | yes | no | yes |
| Modulation | Coding Rate | Data Rate (Mb/s) | Sensitivity (dBm) |
|---|---|---|---|
| BPSK | 1/2 | 6 | −82 |
| BPSK | 3/4 | 9 | −81 |
| QPSK | 1/2 | 12 | −79 |
| QPSK | 3/4 | 18 | −77 |
| 16-QAM | 1/2 | 24 | −74 |
| 16-QAM | 3/4 | 36 | −70 |
| 64-QAM | 2/3 | 48 | −66 |
| 64-QAM | 3/4 | 54 | −65 |
| IEEE Standard | Scenario | Traffic | Constraints | Energy | |||||
|---|---|---|---|---|---|---|---|---|---|
| Revision | 802.11 n | Users | 40 | Calls/hour/user | 5 | −82 dBm | 60 Wh | ||
| GI | 800 ns | Size | 100 m × 100 m | Call length | 180 s | 20 dB | 120 W | ||
| Preamble | Greenfield | X-Y-Z step | 1 m | VoIP codec | G.711 | 65 | 16 W | ||
| Bandwidth | 20 MHz | Altitude layers | {10, …, 40} m | On/Off times | CBR | 0.9 | 9.7 W | ||
| Retries | 7 | Prop. Exponent | 3.3 | Packet interval | 20 ms | 9.7 W | |||
| Drone | (min) | Algorithm 1/Simulation | |||
|---|---|---|---|---|---|
| R | (W) | ||||
| 1 | 12 | 25.61 | 89 / 88 | / | |
| 2 | 11 | 25.64 | 90 / 89 | / | |
| 3 | 14 | 25.56 | 87 / 85 | / | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mayor, V.; Estepa, R.; Estepa, A.; Madinabeitia, G. Energy-Efficient UAVs Deployment for QoS-Guaranteed VoWiFi Service. Sensors 2020, 20, 4455. https://doi.org/10.3390/s20164455
Mayor V, Estepa R, Estepa A, Madinabeitia G. Energy-Efficient UAVs Deployment for QoS-Guaranteed VoWiFi Service. Sensors. 2020; 20(16):4455. https://doi.org/10.3390/s20164455
Chicago/Turabian StyleMayor, Vicente, Rafael Estepa, Antonio Estepa, and Germán Madinabeitia. 2020. "Energy-Efficient UAVs Deployment for QoS-Guaranteed VoWiFi Service" Sensors 20, no. 16: 4455. https://doi.org/10.3390/s20164455
APA StyleMayor, V., Estepa, R., Estepa, A., & Madinabeitia, G. (2020). Energy-Efficient UAVs Deployment for QoS-Guaranteed VoWiFi Service. Sensors, 20(16), 4455. https://doi.org/10.3390/s20164455