A Method for Evaluating and Selecting Suitable Hardware for Deployment of Embedded System on UAVs



Abstract
1. Introduction



2. Background
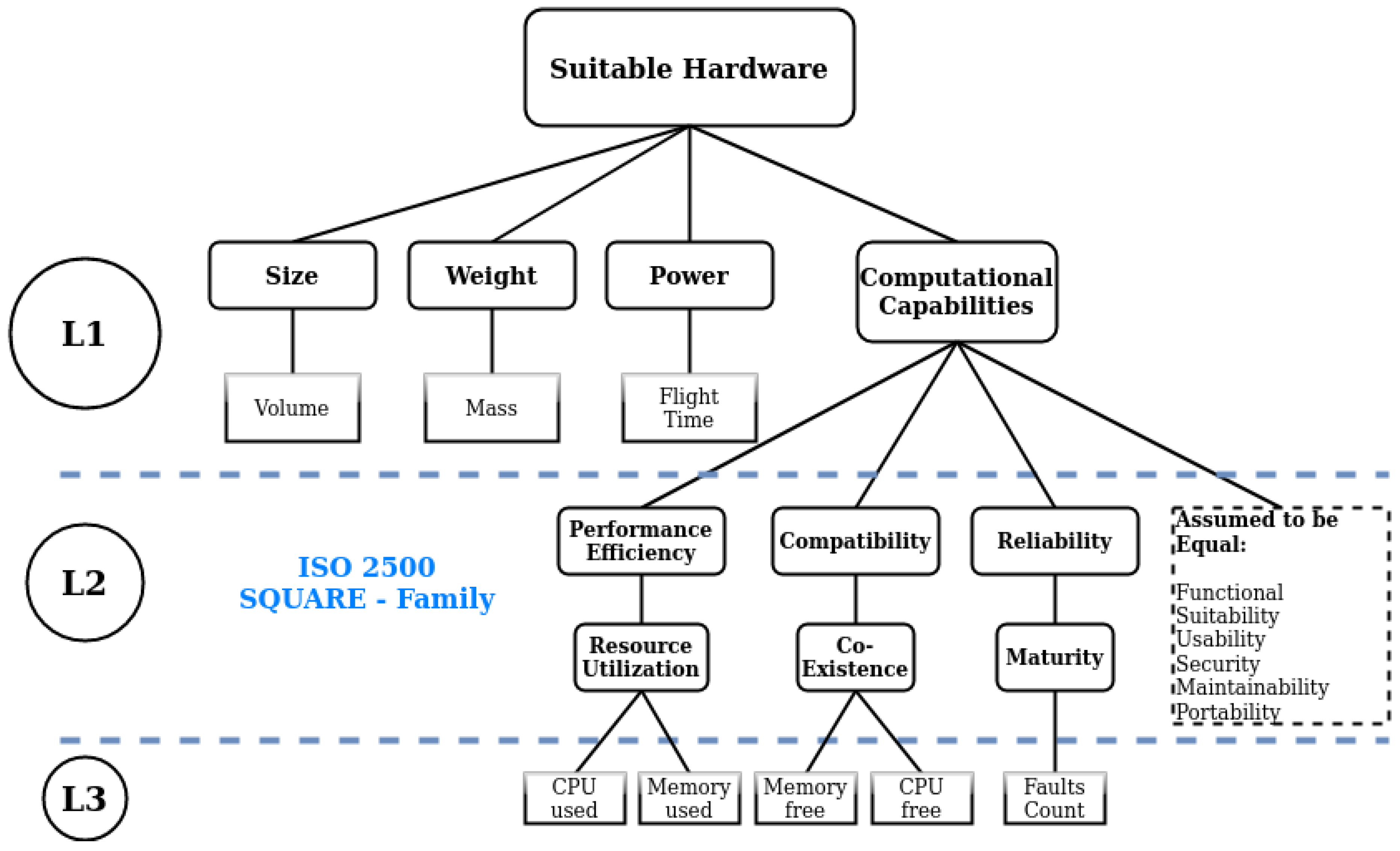
2.1. The ISO SQUARE Family
- Performance Efficiency
- Compatibility
- Reliability
3. Materials and Methods
3.1. Analytic Hierarchy Process
3.1.1. Case Studies
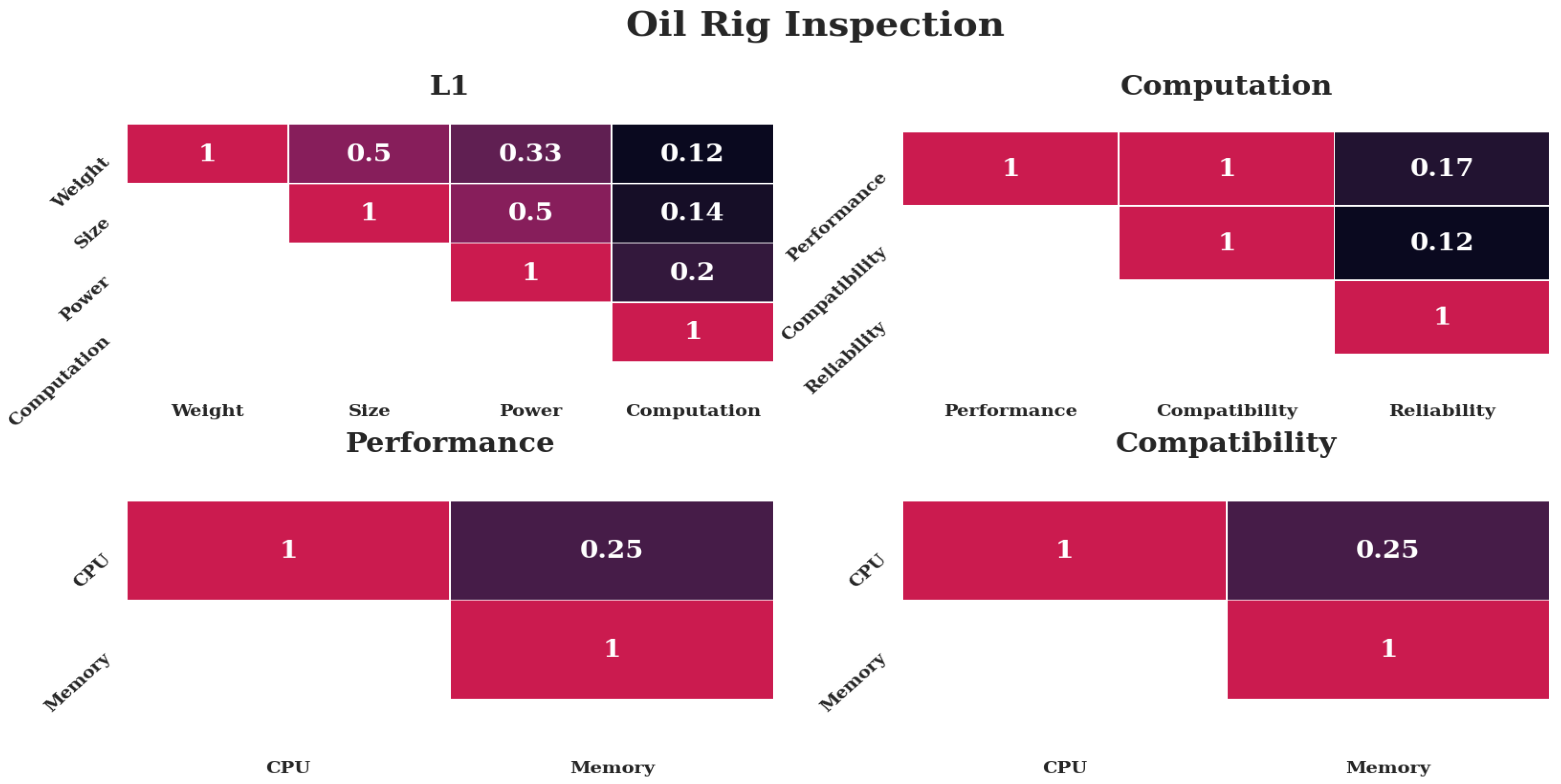
- A fully autonomous UAV performing oil rig inspection [5]
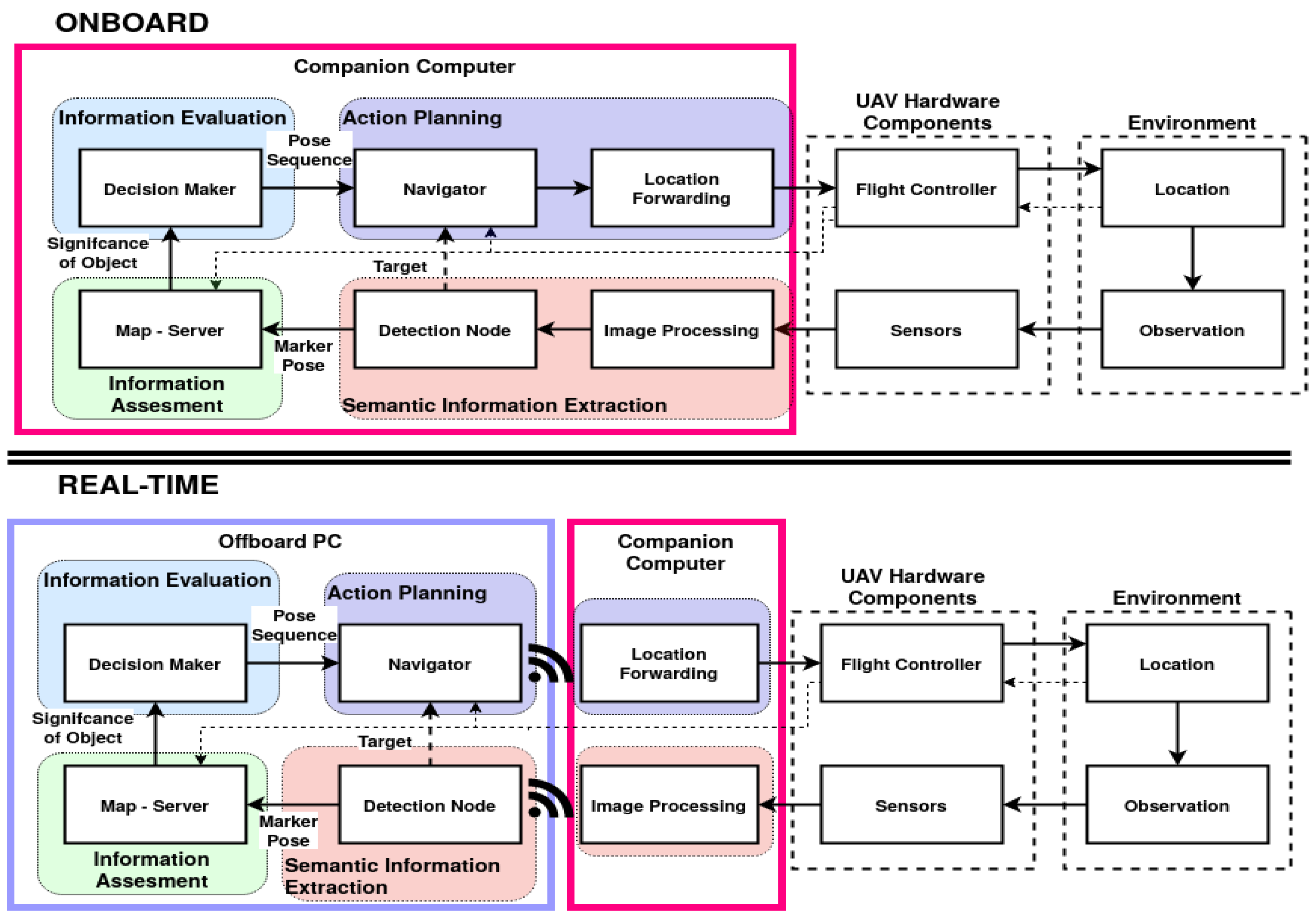
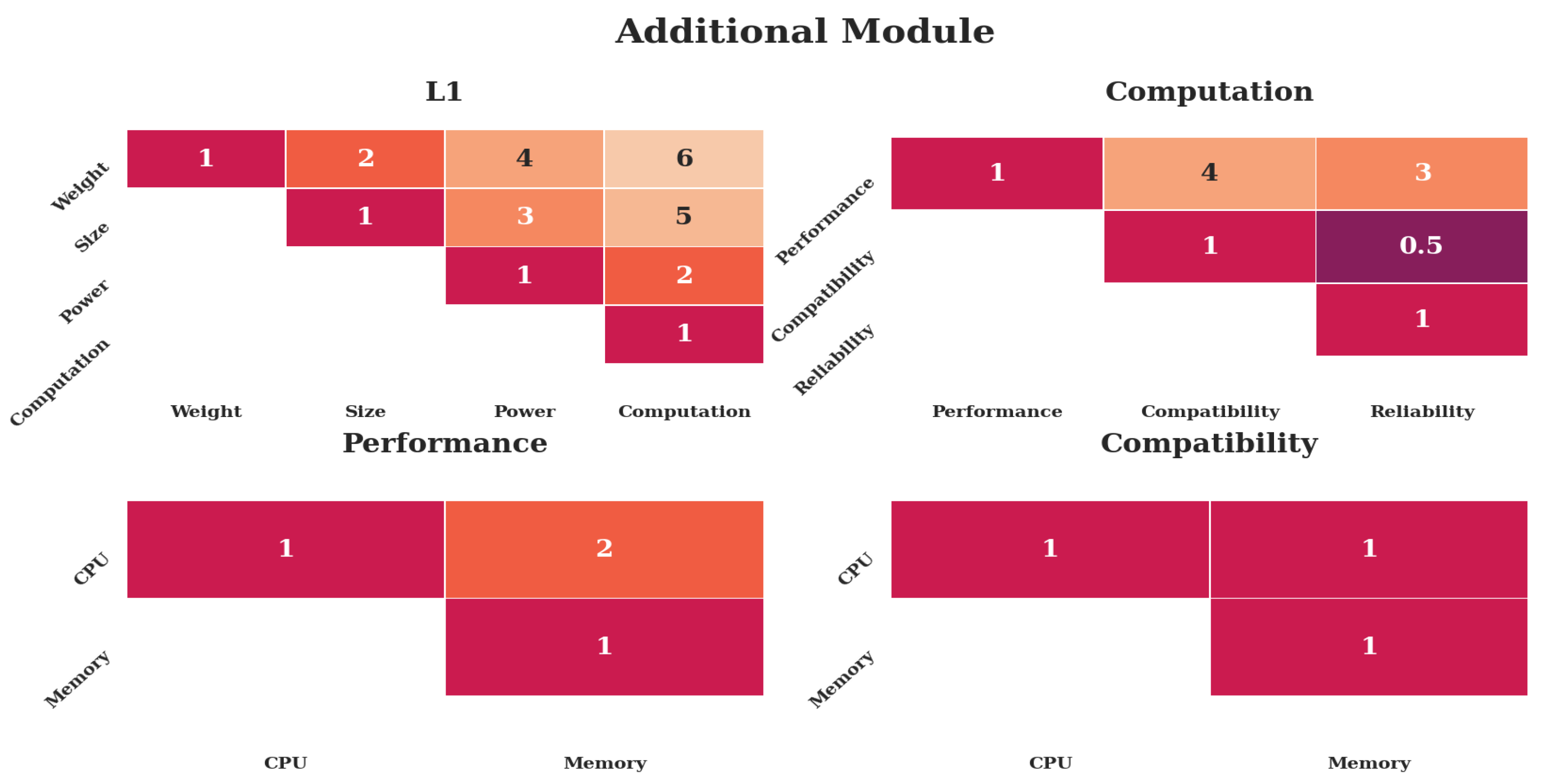
- An additional module on a UAV to improve performance by integrating semantics into its navigation [35]
3.1.2. Monte-Carlo Simulation
| Algorithm 1 Monte Carlo Simulation |
|
4. Experimental Design
4.1. System Specifications
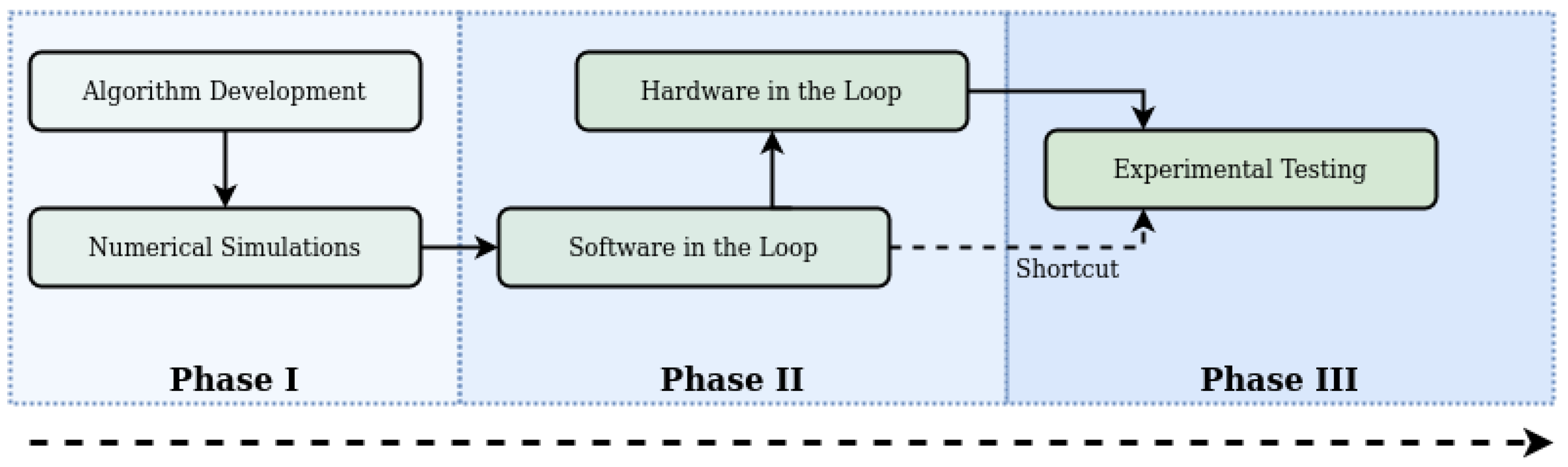
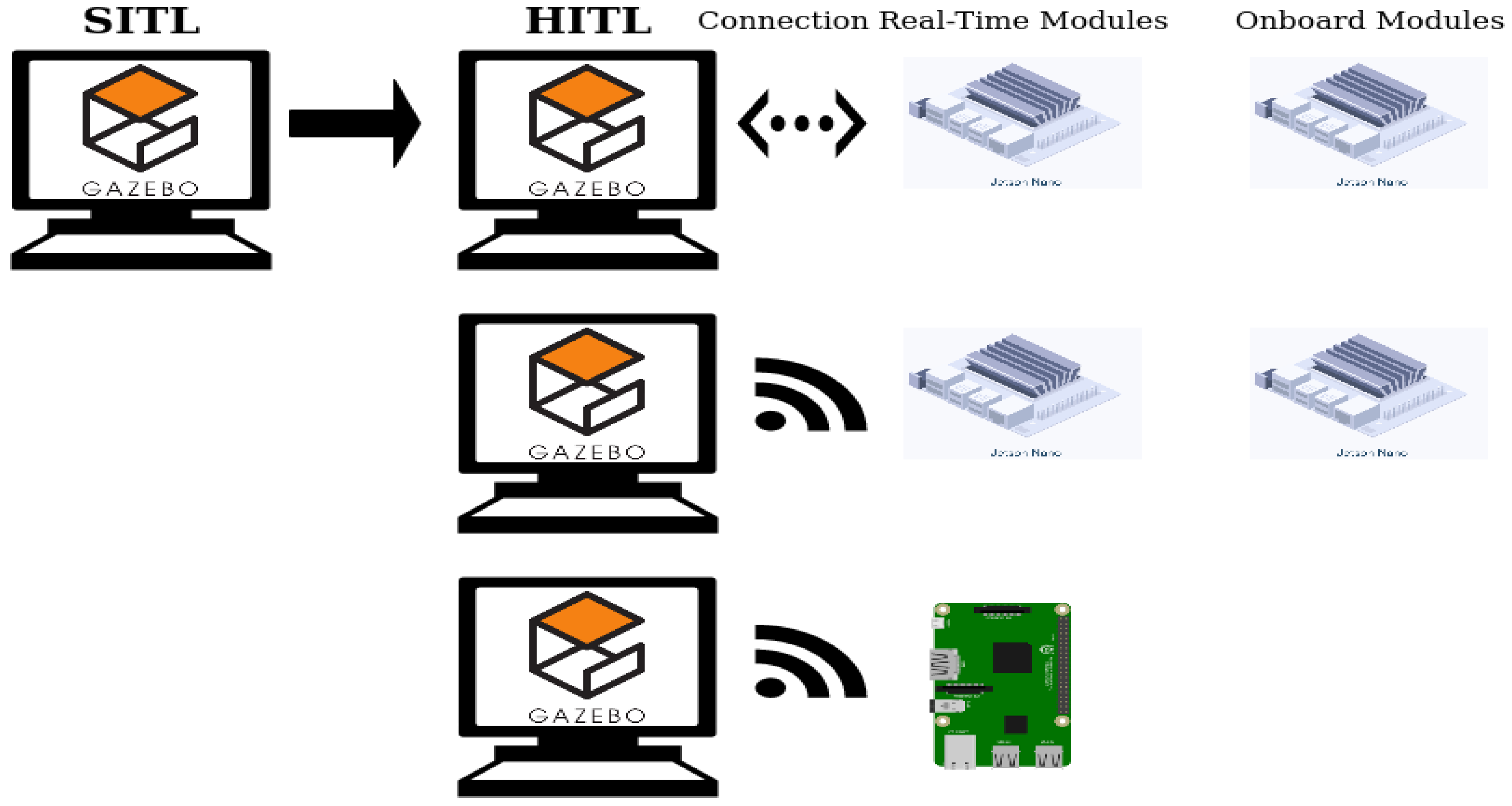
4.2. Development Steps
4.3. Hardware and Software Alternatives
4.4. Profiling
Postprocessing
4.5. Case Studies
4.5.1. Case 1—Oil Rig Inspection
4.5.2. Case 2—Suspended Arm
4.5.3. Case 3—Additional Module
5. Results
5.1. Profiling
5.2. Case Studies
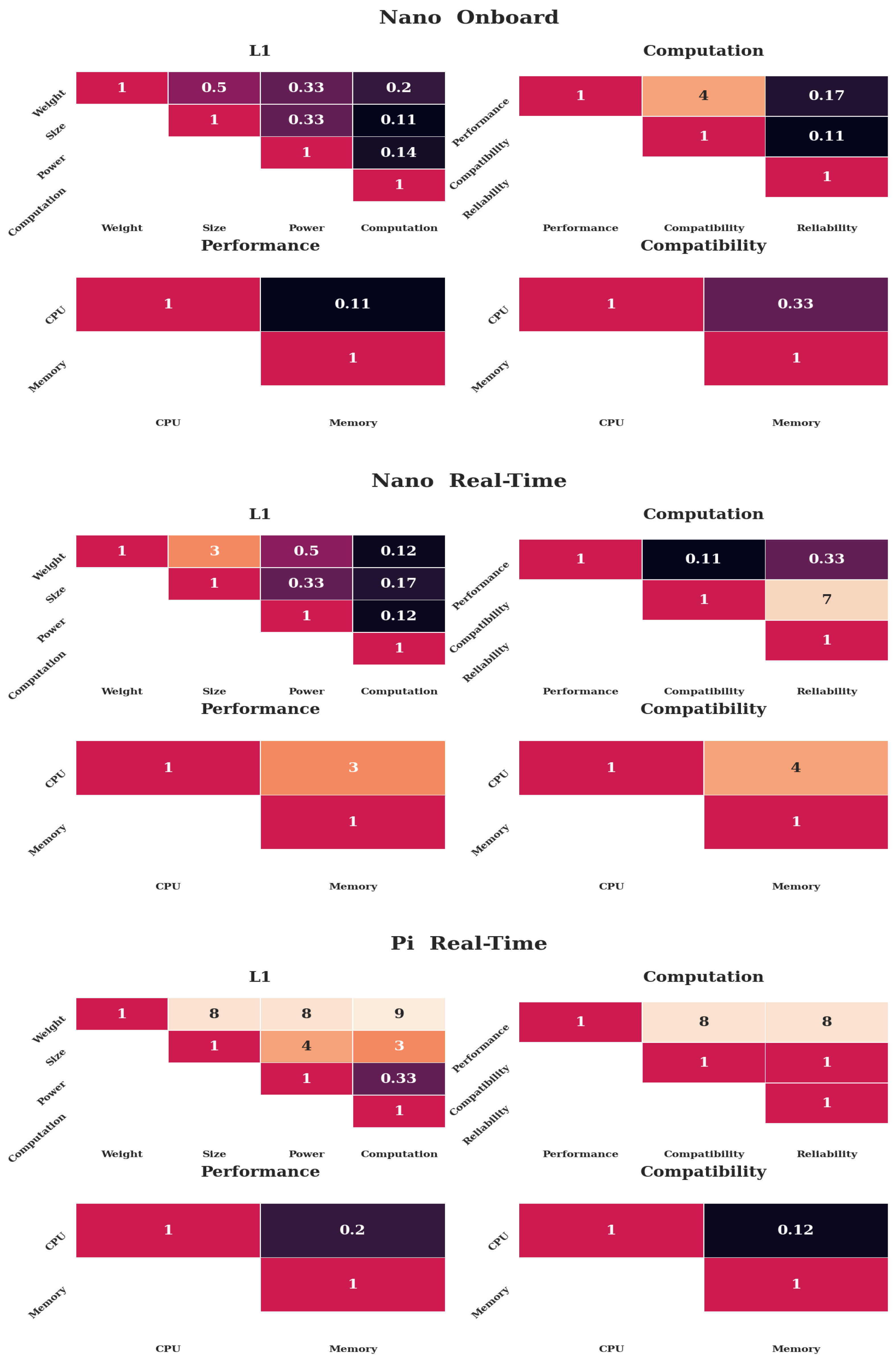
5.3. Monte Carlo Simulation
5.3.1. Nano-Onboard
5.3.2. Nano-Real-Time
5.3.3. Pi-Real-Time
6. Discussion
6.1. The AHP
6.2. Case Studies
6.3. Monte Carlo Simulation
6.4. Comparing Case Studies and Monte Carlo Simulation
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Hardware Implementation Details

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Nano | Pi | ||
|---|---|---|---|---|
| Software | Type | Installation | Type | Installation |
| OS | Jetpack Ubuntu 18.04 | Etcher | Ubuntu Mate 18.04 | Cross-compilation Pi 3B |
| Swap | Swap | 2048 MB | Zram/Swap | 256/1052 MB |
| ROS | Melodic | Package Manager | Melodic | Package Manager |
| MavRos | 0.33.4 | Source | 0.33.4 | Source |
| OpenCV | 3.4.6. | Source + Contrib | 3.4.6 | Source + Contrib Cross-compilation |
| Timesync | NTP | ntp.qut | NTP | ntp.qut |
| Proprietary Changes | Power Mode | 0 | Serial Clock speed | Elevated-mavros |
| HDMI | disabled | HDMI | disabled | |
| WiFi | Powersaving disabled | WiFi | Powersaving disabled | |
| Power Supply | Barrel Jack 4A | Display Service | disabled | |
| SD-Card | 32 GB SanDisk SDHC U3 | SD-Card | 32 GB SanDisk SDHC U1 | |
| Serial Port Config | 921600 8N1 | Serial Port Config | 921600 8N1 | |
| Bluetooth | disabled-Serial Port | |||
Appendix B. Monte-Carlo Simulation Results

| Device | Nano | Pi | |
|---|---|---|---|
| Load | RT | Onb | RT |
| Nano-RT | 0.42533 | 0.30175 | 0.27292 |
| Nano-Onb | 0.37235 | 0.37926 | 0.24840 |
| Pi-RT | 0.17570 | 0.18163 | 0.64268 |
References
- Gonzalez, L.F.; Montes, G.A.; Puig, E.; Johnson, S.; Mengersen, K.; Gaston, K.J. Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation. Sensors 2016, 16, 97. [Google Scholar] [CrossRef] [PubMed]
- Vanegas, F.; Bratanov, D.; Powell, K.; Weiss, J.; Gonzalez, F. A Novel Methodology for Improving Plant Pest Surveillance in Vineyards and Crops Using UAV-Based Hyperspectral and Spatial Data. Sensors 2018, 18, 260. [Google Scholar] [CrossRef] [PubMed]
- Villa, T.F.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.D.; Morawska, L. An Overview of Small Unmanned Aerial Vehicles for Air Quality Measurements: Present Applications and Future Prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef] [PubMed]
- Kaufmann, E.; Loquercio, A.; Ranftl, R.; Dosovitskiy, A.; Koltun, V.; Scaramuzza, D. Deep Drone Racing: Learning Agile Flight in Dynamic Environments. arXiv 2018, arXiv:1806.08548. [Google Scholar]
- Welburn, E.; Khalili, H.H.; Gupta, A.; Watson, S.; Carrasco, J. A Navigational System for Quadcopter Remote Inspection of Offshore Substations. In Proceedings of the Fifteenth International Conference on Autonomic and Autonomous Systems, Athens, Greece, 2–6 June 2019. [Google Scholar]
- Boroujerdian, B.; Genc, H.; Krishnan, S.; Cui, W.; Faust, A.; Reddi, V. MAVBench: Micro Aerial Vehicle Benchmarking. In Proceedings of the 2018 51st Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Fukuoka, Japan, 20–24 October 2018; pp. 894–907. [Google Scholar] [CrossRef]
- Vanegas, F.; Gonzalez, F. Uncertainty based online planning for UAV target finding in cluttered and GPS-denied environments. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Galvez Serna, J.; Vanegas Alvarez, F.; Gonzalez, F.; Flannery, D. A review of current approaches for UAV autonomous mission planning for Mars biosignatures detection. In IEEE Aerospace Conference; IEEE: Piscataway, NJ, USA, 2020; in press. [Google Scholar]
- Liu, L.; Ouyang, W.; Wang, X.; Fieguth, P.; Chen, J.; Liu, X.; Pietikäinen, M. Deep Learning for Generic Object Detection: A Survey. Int. J. Comput. Vis. 2019. [Google Scholar] [CrossRef]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Corke, P.; Dayoub, F.; Hall, D.; Skinner, J.; Sünderhauf, N. What can robotics research learn from computer vision research? arXiv 2020, arXiv:2001.02366. [Google Scholar]
- Cervera, E. Try to Start It! The Challenge of Reusing Code in Robotics Research. IEEE Robot. Autom. Lett. 2019, 4, 49–56. [Google Scholar] [CrossRef]
- Zhao, Y.; Zheng, Z.; Liu, Y. Survey on computational-intelligence-based UAV path planning. Knowl.-Based Syst. 2018, 158, 54–64. [Google Scholar] [CrossRef]
- Lu, Y.; Xue, Z.; Xia, G.S.; Zhang, L. A survey on vision-based UAV navigation. Geo Spat. Inf. Sci. 2018, 21, 21–32. [Google Scholar] [CrossRef]
- Kang, K.; Belkhale, S.; Kahn, G.; Abbeel, P.; Levine, S. Generalization through Simulation: Integrating Simulated and Real Data into Deep Reinforcement Learning for Vision-Based Autonomous Flight. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6008–6014. [Google Scholar] [CrossRef]
- Toudeshki, A.G.; Shamshirdar, F.; Vaughan, R. Robust UAV Visual Teach and Repeat Using Only Sparse Semantic Object Features. In Proceedings of the 2018 15th Conference on Computer and Robot Vision (CRV), Toronto, ON, Canada, 8–10 May 2018; pp. 182–189. [Google Scholar] [CrossRef]
- Loquercio, A.; Maqueda, A.I.; del Blanco, C.R.; Scaramuzza, D. DroNet: Learning to Fly by Driving. IEEE Robot. Autom. Lett. 2018, 3, 1088–1095. [Google Scholar] [CrossRef]
- Kouris, A.; Bouganis, C. Learning to Fly by MySelf: A Self-Supervised CNN-Based Approach for Autonomous Navigation. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Kim, D.K.; Chen, T. Deep Neural Network for Real-Time Autonomous Indoor Navigation. arXiv 2015, arXiv:1511.04668. [Google Scholar]
- Ross, S.; Melik-Barkhudarov, N.; Shankar, K.S.; Wendel, A.; Dey, D.; Bagnell, J.A.; Hebert, M. Learning monocular reactive UAV control in cluttered natural environments. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1765–1772. [Google Scholar] [CrossRef]
- Tardioli, D.; Parasuraman, R.; Ögren, P. Pound: A multi-master ROS node for reducing delay and jitter in wireless multi-robot networks. Robot. Auton. Syst. 2019, 111, 73–87. [Google Scholar] [CrossRef]
- Bihlmaier, A.; Hadlich, M.; Wörn, H. Advanced ROS Network Introspection (ARNI). In Robot Operating System (ROS): The Complete Reference; Koubaa, A., Ed.; Studies in Computational Intelligence; Springer International Publishing: Cham, Switzerland, 2016; Volume 1, pp. 651–670. [Google Scholar] [CrossRef]
- Kyrkou, C.; Plastiras, G.; Theocharides, T.; Venieris, S.I.; Bouganis, C. DroNet: Efficient convolutional neural network detector for real-time UAV applications. In Proceedings of the 2018 Design, Automation Test in Europe Conference Exhibition (DATE), Dresden, Germany, 19–23 March 2018; pp. 967–972. [Google Scholar] [CrossRef]
- Dang, T.; Papachristos, C.; Alexis, K. Autonomous exploration and simultaneous object search using aerial robots. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Papachristos, C.; Kamel, M.; Popović, M.; Khattak, S.; Bircher, A.; Oleynikova, H.; Dang, T.; Mascarich, F.; Alexis, K.; Siegwart, R. Autonomous Exploration and Inspection Path Planning for Aerial Robots Using the Robot Operating System. In Robot Operating System (ROS): The Complete Reference; Koubaa, A., Ed.; Studies in Computational Intelligence; Springer International Publishing: Cham, Switzerland, 2019; Volume 3, pp. 67–111. [Google Scholar] [CrossRef]
- Modasshir, M.; Li, A.Q.; Rekleitis, I. Deep Neural Networks: A Comparison on Different Computing Platforms. In Proceedings of the 2018 15th Conference on Computer and Robot Vision (CRV), Toronto, ON, Canada, 8–10 May 2018; pp. 383–389. [Google Scholar] [CrossRef]
- Krishnan, S.; Wan, Z.; Bhardwaj, K.; Whatmough, P.; Faust, A.; Wei, G.Y.; Brooks, D.; Reddi, V.J. The Sky Is Not the Limit: A Visual Performance Model for Cyber-Physical Co-Design in Autonomous Machines. IEEE Comput. Archit. Lett. 2020, 19, 38–42. [Google Scholar] [CrossRef]
- Saaty, R.W. The analytic hierarchy process—What it is and how it is used. Math. Model. 1987, 9, 161–176. [Google Scholar] [CrossRef]
- Suarez, A.; Vega, V.M.; Fernandez, M.; Heredia, G.; Ollero, A. Benchmarks for Aerial Manipulation. IEEE Robot. Autom. Lett. 2020, 5, 2650–2657. [Google Scholar] [CrossRef]
- Morton, K.; Toro, L.F.G. Development of a robust framework for an outdoor mobile manipulation UAV. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–8. [Google Scholar] [CrossRef]
- ISO; IEC. 25010:2011-Systems and Software Engineering-Systems and software Quality Requirements and Evaluation (SQuaRE)-System and Software Quality Models; Standard 25010:2011; ISO/IEC: Geneva, Switzerland, 2011. [Google Scholar]
- ISO; IEC. 25021:2012-Systems and Software Engineering-Systems and Software Quality Requirements and Evaluation (SQuaRE)-Quality Measure Elements; Standard 25021:2012; revised 2019; ISO/IEC: Geneva, Switzerland, 2012. [Google Scholar]
- ISO; IEC. 25023:2016-Systems and Software Engineering-Systems and Software Quality Requirements and Evaluation (SQuaRE)-Measurement of System and Software Product Quality; Standard 25023:2016; ISO/IEC: Geneva, Switzerland, 2016. [Google Scholar]
- Simmonds, C. Mastering Embedded Linux Programming; Packt Publishing Ltd.: Birmingham, UK, 2017. [Google Scholar]
- Mandel, N.; Vanegas, F.; Milford, M.; Gonzalez, F. Towards Simulating Semantic Onboard UAV Navigation. In IEEE Aerospace Conference; IEEE: Big Sky, MT, USA, 2020. [Google Scholar]
- Williams, S.; Waterman, A.; Patterson, D. Roofline: An insightful visual performance model for multicore architectures. Commun. ACM 2009, 52, 65–76. [Google Scholar] [CrossRef]
- Cervera, E.; Del Pobil, A.P. ROSLab: Sharing ROS Code Interactively With Docker and JupyterLab. IEEE Robot. Autom. Mag. 2019, 26, 64–69. [Google Scholar] [CrossRef]
- Huang, J.; Rathod, V.; Sun, C.; Zhu, M.; Korattikara, A.; Fathi, A.; Fischer, I.; Wojna, Z.; Song, Y.; Guadarrama, S.; et al. Speed/accuracy trade-offs for modern convolutional object detectors. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Kouris, A.; Venieris, S.I.; Bouganis, C. Towards Efficient On-Board Deployment of DNNs on Intelligent Autonomous Systems. In Proceedings of the 2019 IEEE Computer Society Annual Symposium on VLSI (ISVLSI), Miami, FL, USA, 15–17 July 2019; pp. 568–573. [Google Scholar] [CrossRef]
- Siegwart, R. Introduction to Autonomous Mobile Robots, 2nd ed.; Intelligent Robotics and Autonomous Agents Series; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Brooks, D. Rosprofiler-ROS Wiki. Available online: http://wiki.ros.org/rosprofiler (accessed on 7 August 2020).
- Subramanian, N.; Ramanathan, R. A review of applications of Analytic Hierarchy Process in operations management. Int. J. Prod. Econ. 2012, 138, 215–241. [Google Scholar] [CrossRef]
- Mühlbacher, A.C.; Kaczynski, A. Der Analytic Hierarchy Process (AHP): Eine Methode zur Entscheidungsunterstützung im Gesundheitswesen. Pharmacoecon. Ger. Res. Artic. 2013, 11, 119–132. [Google Scholar] [CrossRef]
- Ataei, M.; Shahsavany, H.; Mikaeil, R. Monte Carlo Analytic Hierarchy Process (MAHP) approach to selection of optimum mining method. Int. J. Min. Sci. Technol. 2013, 23, 573–578. [Google Scholar] [CrossRef]
- Dahri, N.; Abida, H. Monte Carlo simulation-aided analytical hierarchy process (AHP) for flood susceptibility mapping in Gabes Basin (southeastern Tunisia). Environ. Earth Sci. 2017, 76, 302. [Google Scholar] [CrossRef]
- Zamir, A.; Sax, A.; Shen, W.; Guibas, L.; Malik, J.; Savarese, S. Taskonomy: Disentangling Task Transfer Learning. arXiv 2018, arXiv:1804.08328. [Google Scholar]
- Franek, J.; Kresta, A. Judgment Scales and Consistency Measure in AHP. Procedia Econ. Financ. 2014, 12, 164–173. [Google Scholar] [CrossRef]
- Ladosz, P.; Coombes, M.; Smith, J.; Hutchinson, M. A Generic ROS Based System for Rapid Development and Testing of Algorithms for Autonomous Ground and Aerial Vehicles. In Robot Operating System (ROS): The Complete Reference; Koubaa, A., Ed.; Studies in Computational Intelligence; Springer International Publishing: Cham, Switzerland, 2019; Volume 3, pp. 113–153. [Google Scholar] [CrossRef]








| Device | Nano | Pi | ||
|---|---|---|---|---|
| Load | RT | Onb | RT | Unit |
| CPU Load Max | 82.9 | 91.3 | 94.5 | % |
| Used Mem Max | 547 | 966 | 218 | MB |
| Avail Mem Min | 3249 | 2830 | 154 | MB |
| Current | 3.981 | 4.233 | 3.689 | A |
| Faults | 1 | 0 | 310 | # |
| Volume | 0.4464 | 0.4464 | 0.0672 | l |
| Weight | 0.252 | 0.252 | 0.044 | kg |
| Device | Nano | Pi | |
|---|---|---|---|
| Load | RT | Onb | RT |
| Inspection | 0.3832 | 0.3818 | 0.2350 |
| Suspended Arm | 0.2267 | 0.2187 | 0.5546 |
| Add. Module | 0.2095 | 0.2087 | 0.5828 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mandel, N.; Milford, M.; Gonzalez, F. A Method for Evaluating and Selecting Suitable Hardware for Deployment of Embedded System on UAVs. Sensors 2020, 20, 4420. https://doi.org/10.3390/s20164420
Mandel N, Milford M, Gonzalez F. A Method for Evaluating and Selecting Suitable Hardware for Deployment of Embedded System on UAVs. Sensors. 2020; 20(16):4420. https://doi.org/10.3390/s20164420
Chicago/Turabian StyleMandel, Nicolas, Michael Milford, and Felipe Gonzalez. 2020. "A Method for Evaluating and Selecting Suitable Hardware for Deployment of Embedded System on UAVs" Sensors 20, no. 16: 4420. https://doi.org/10.3390/s20164420
APA StyleMandel, N., Milford, M., & Gonzalez, F. (2020). A Method for Evaluating and Selecting Suitable Hardware for Deployment of Embedded System on UAVs. Sensors, 20(16), 4420. https://doi.org/10.3390/s20164420