A Gaussian Beam Based Recursive Stiffness Matrix Model to Simulate Ultrasonic Array Signals from Multi-Layered Media



Abstract
1. Introduction
2. Theory
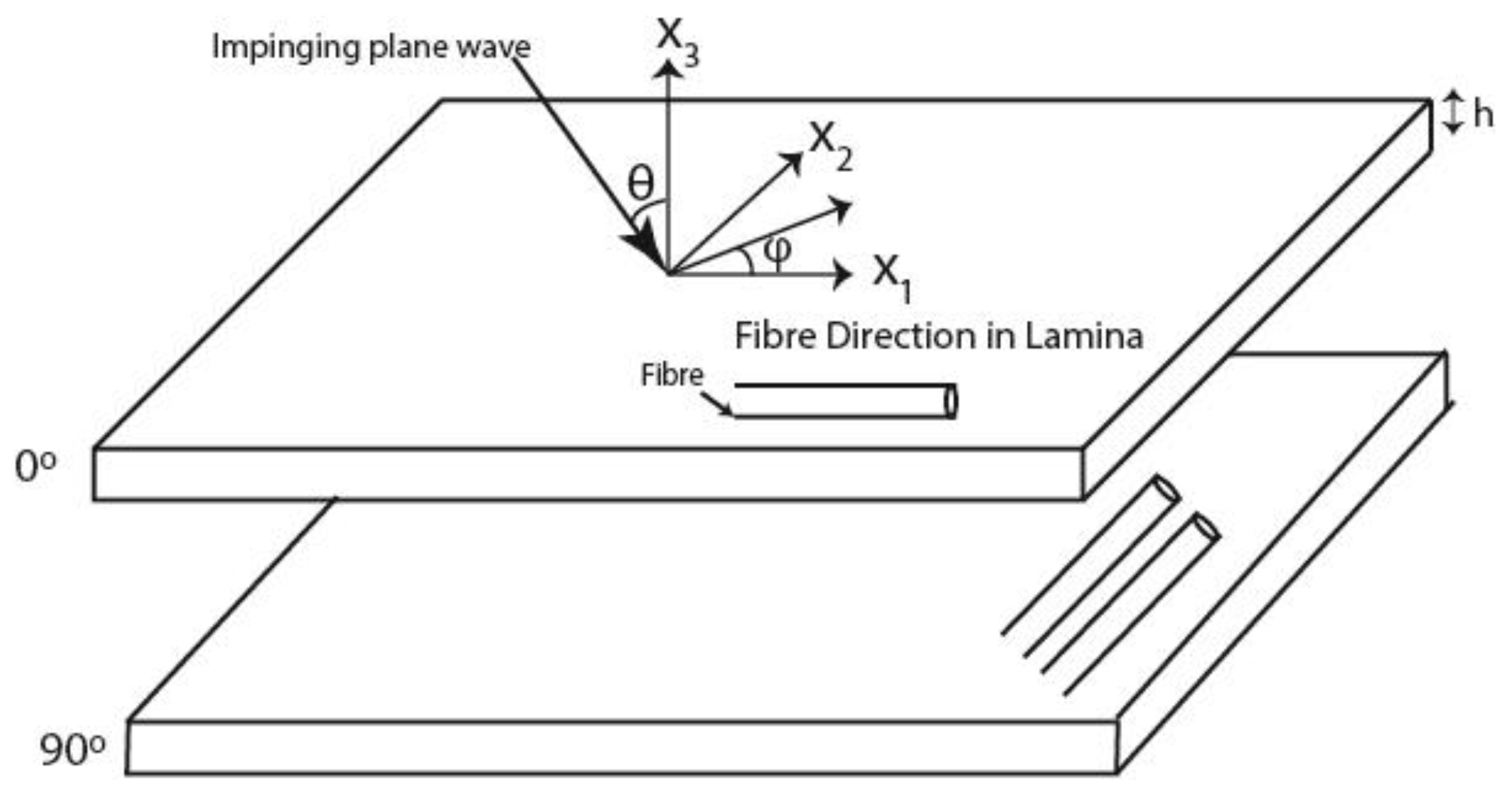
2.1. Stiffness Matrix Method for Multi-Layer Wave Propagation
2.2. Modeling of the Transducer Gaussian Beams
2.3. Angular Spectrum of Plane Waves
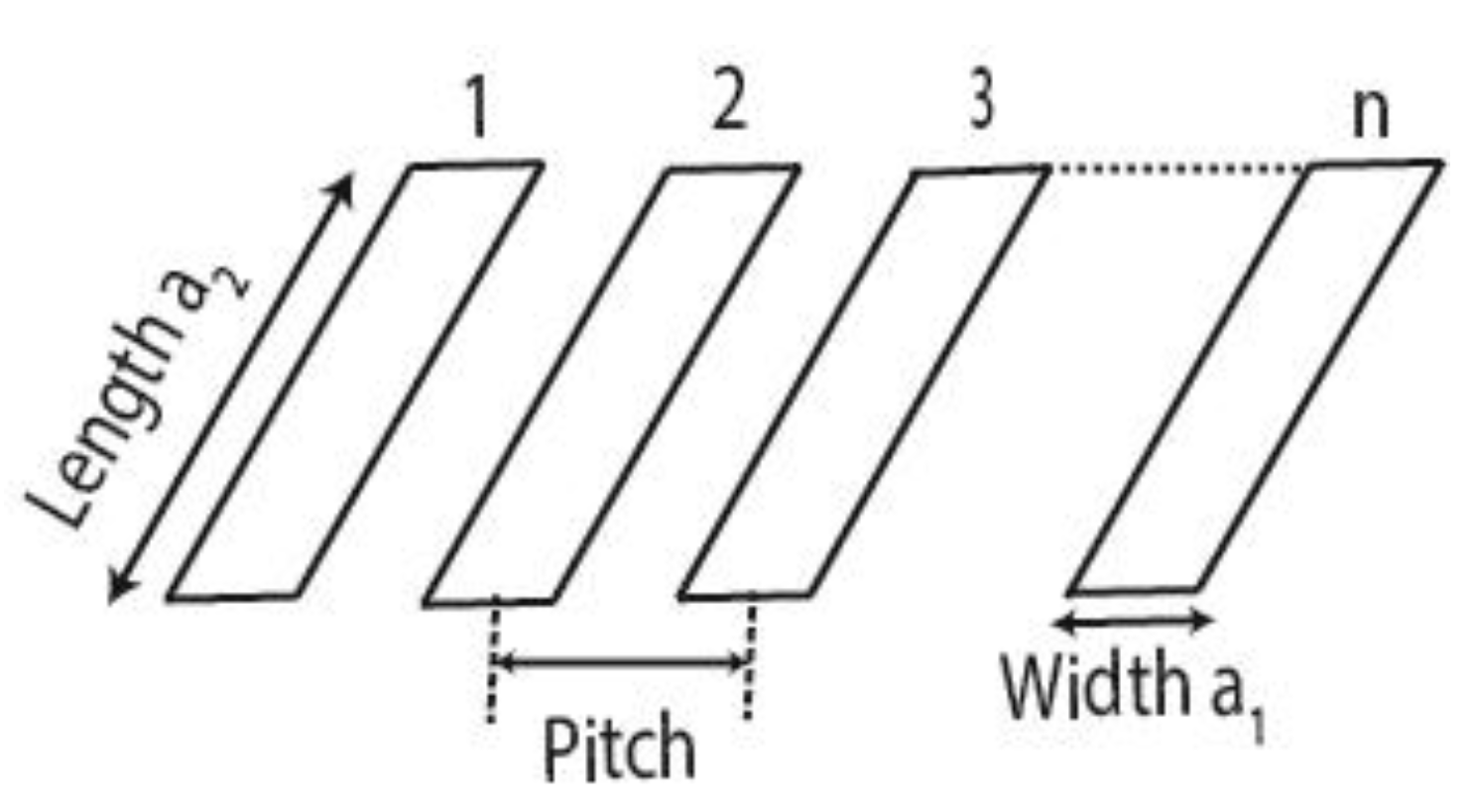
2.4. Modeling of Array Signals to Simulate FMC
- The backwall echo response for a transducer element from a known material such as aluminium, etc. is calculated experimentally.
- The backwall echo is then calculated analytically using a simple testing configuration.
3. Simulation and Experimental Results
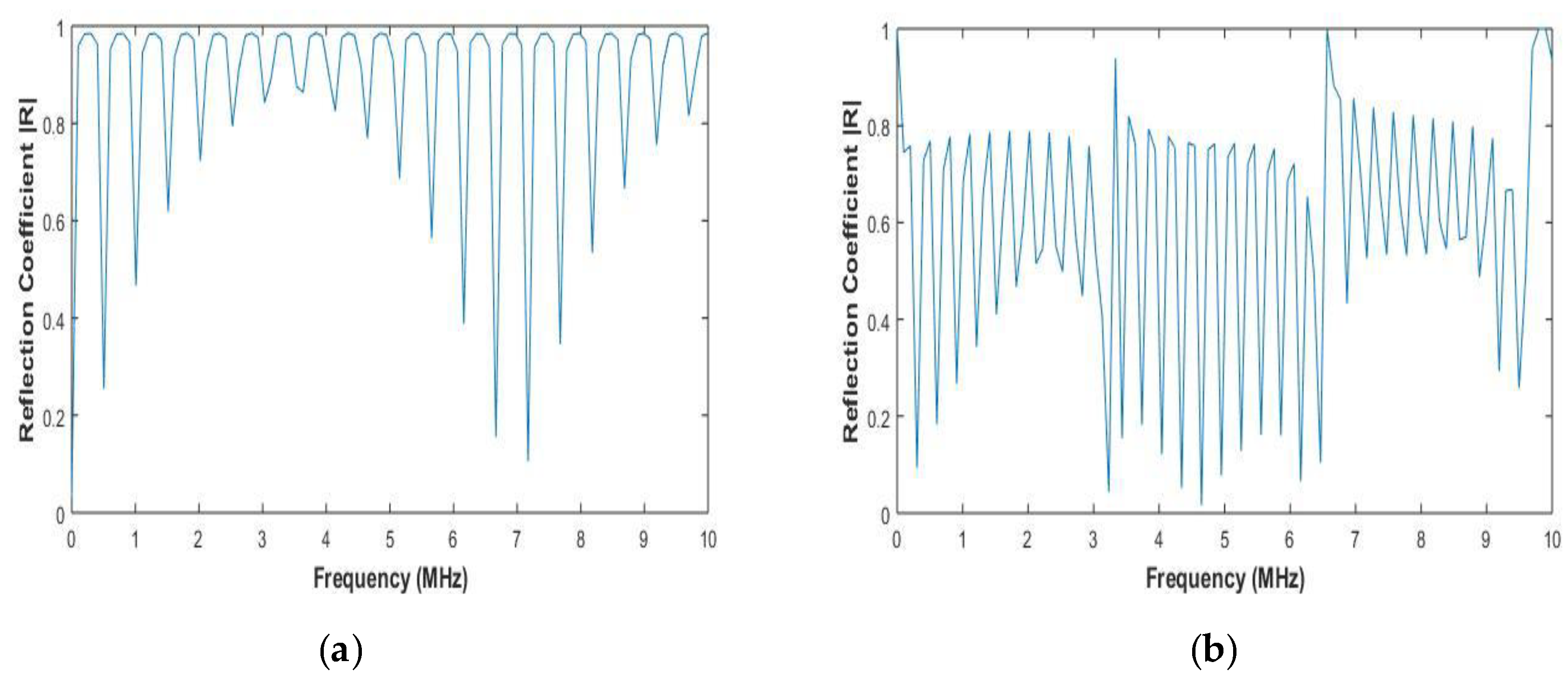
3.1. Total Reflection Coefficient of the Materials under Inspection
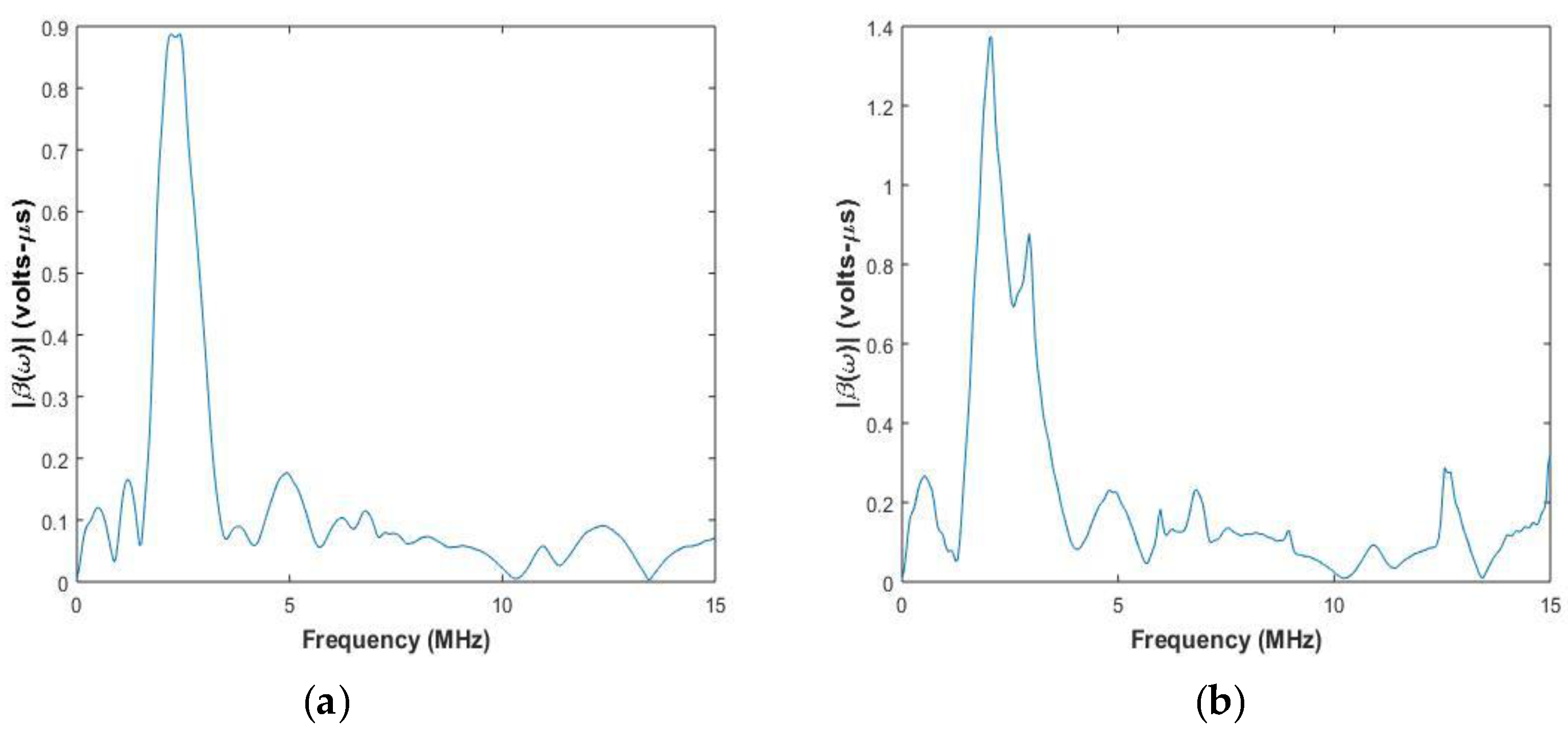
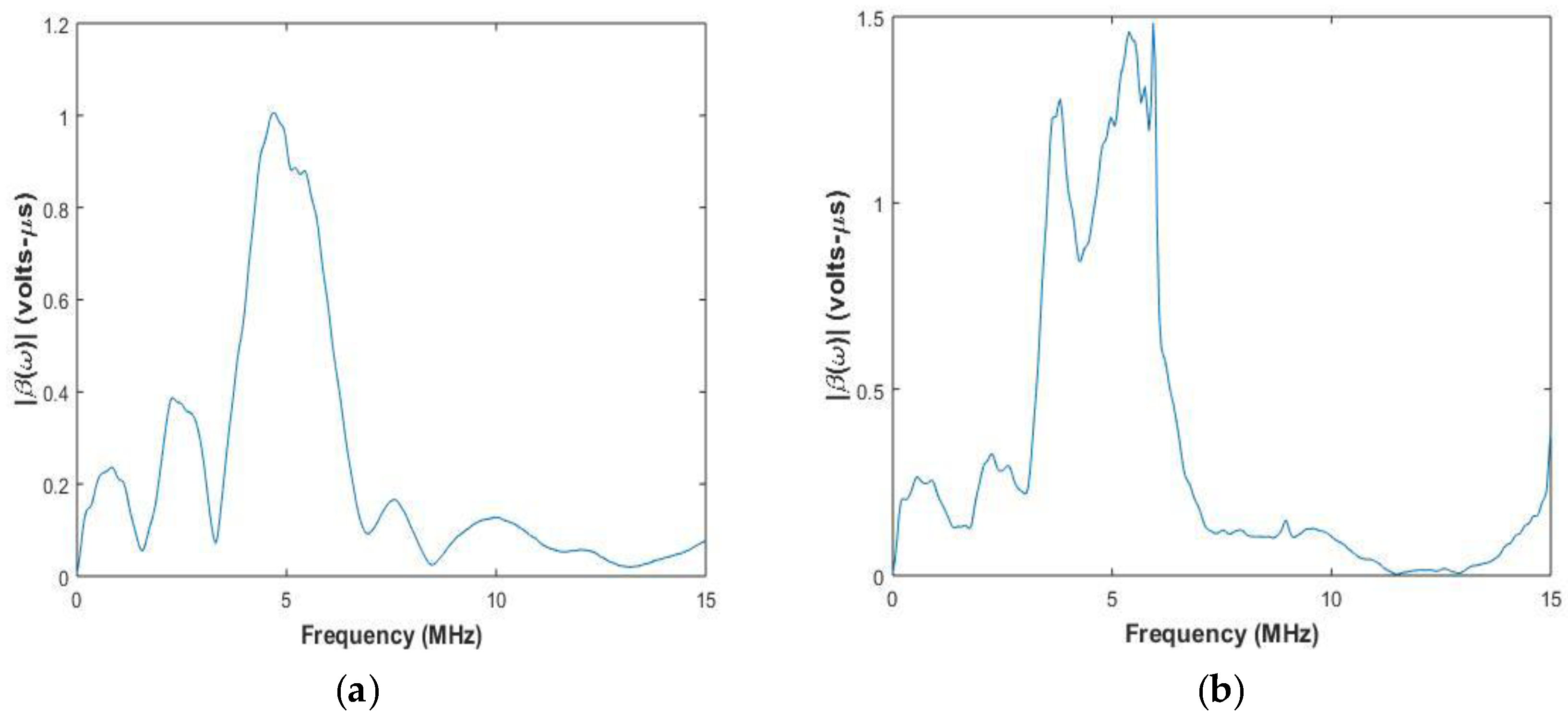
3.2. System Functions of the Transducer Arrays
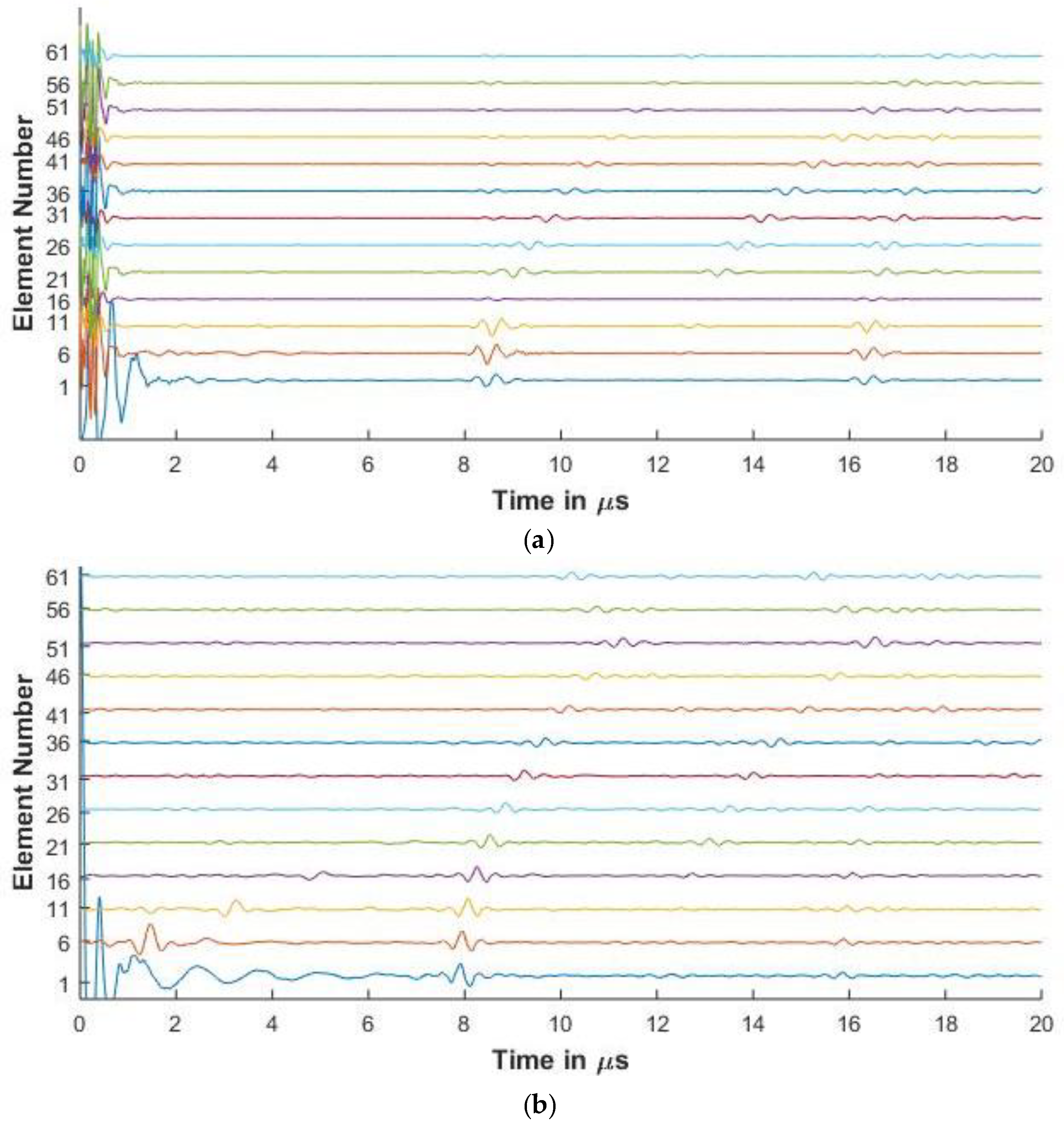
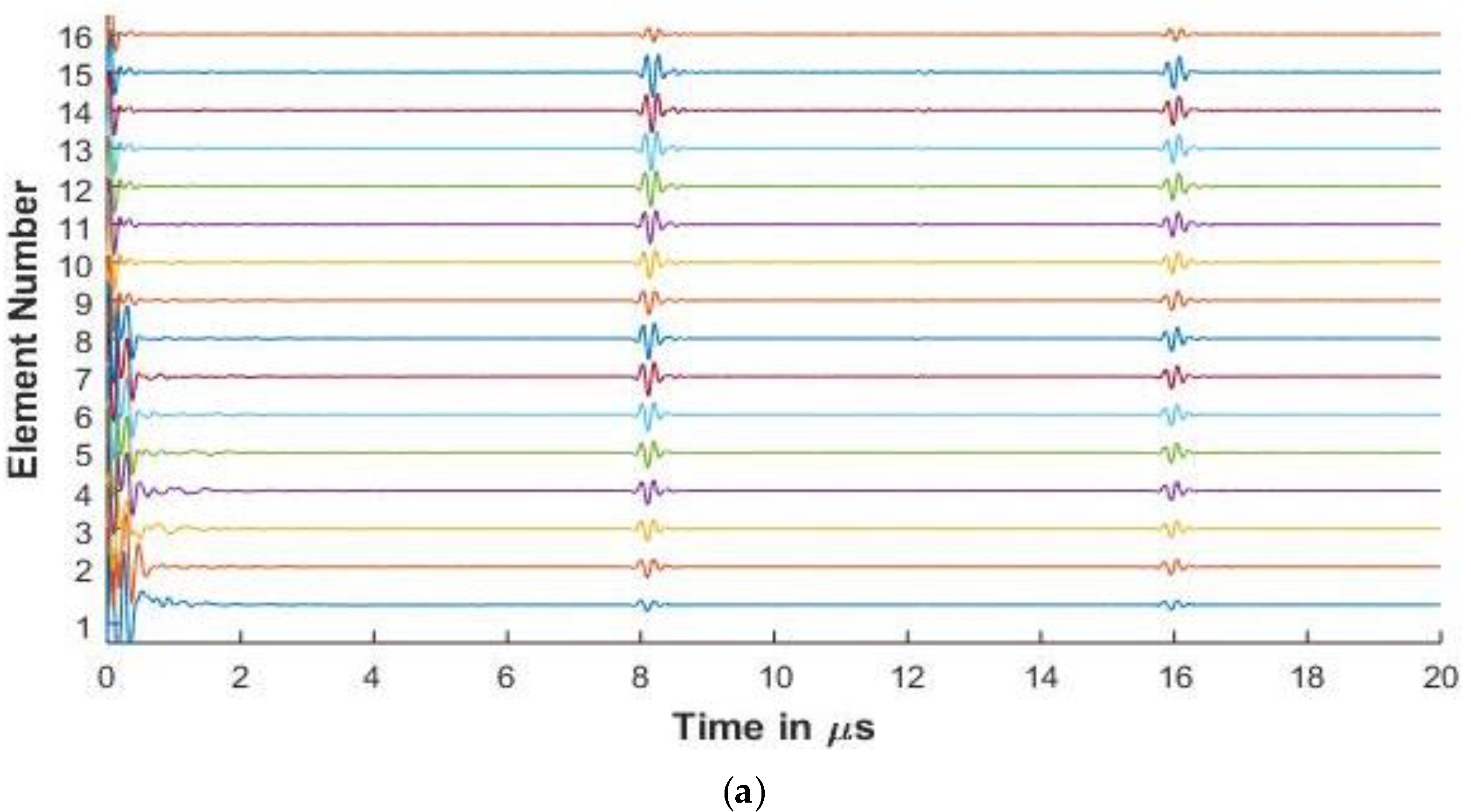
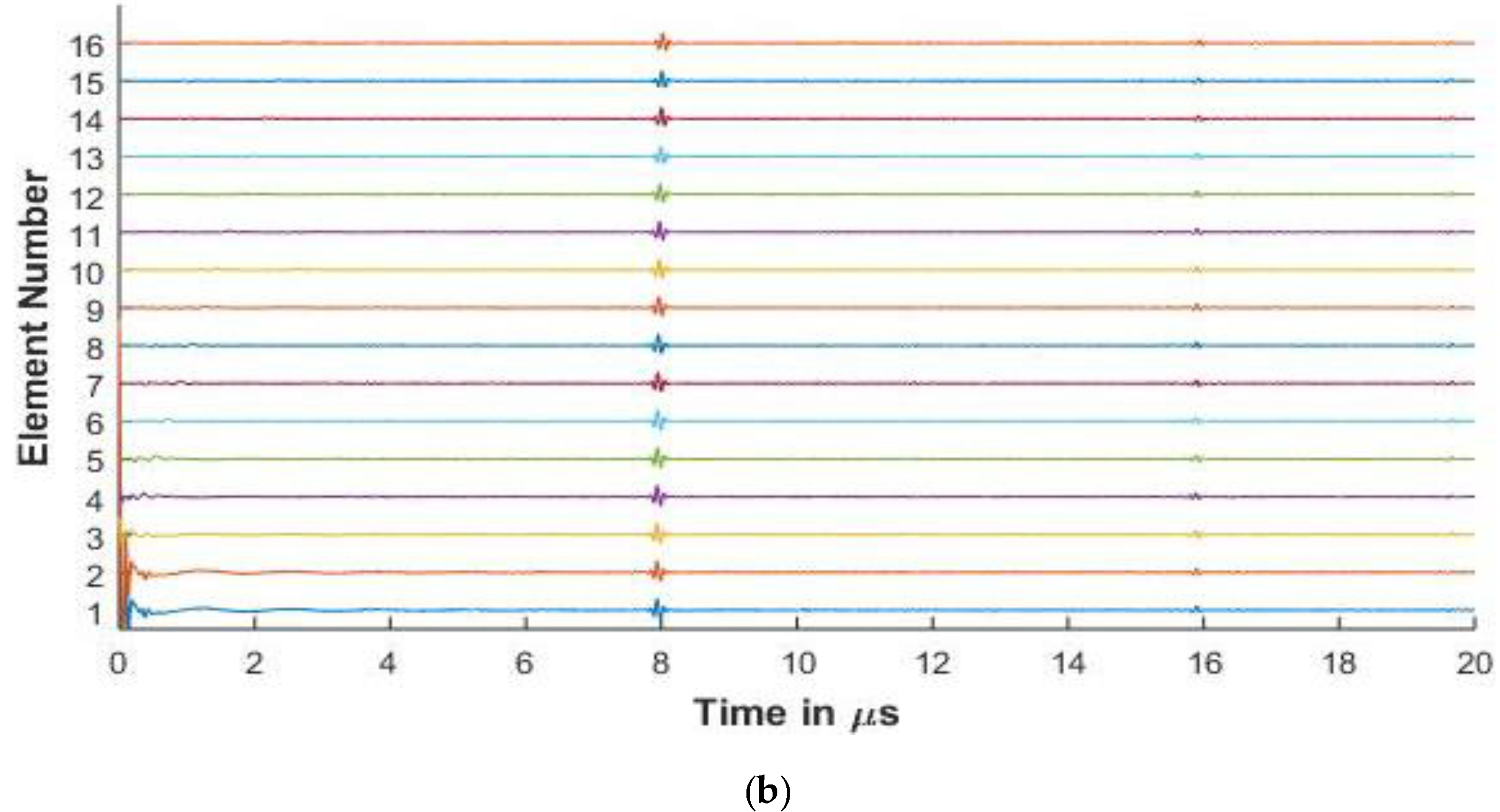
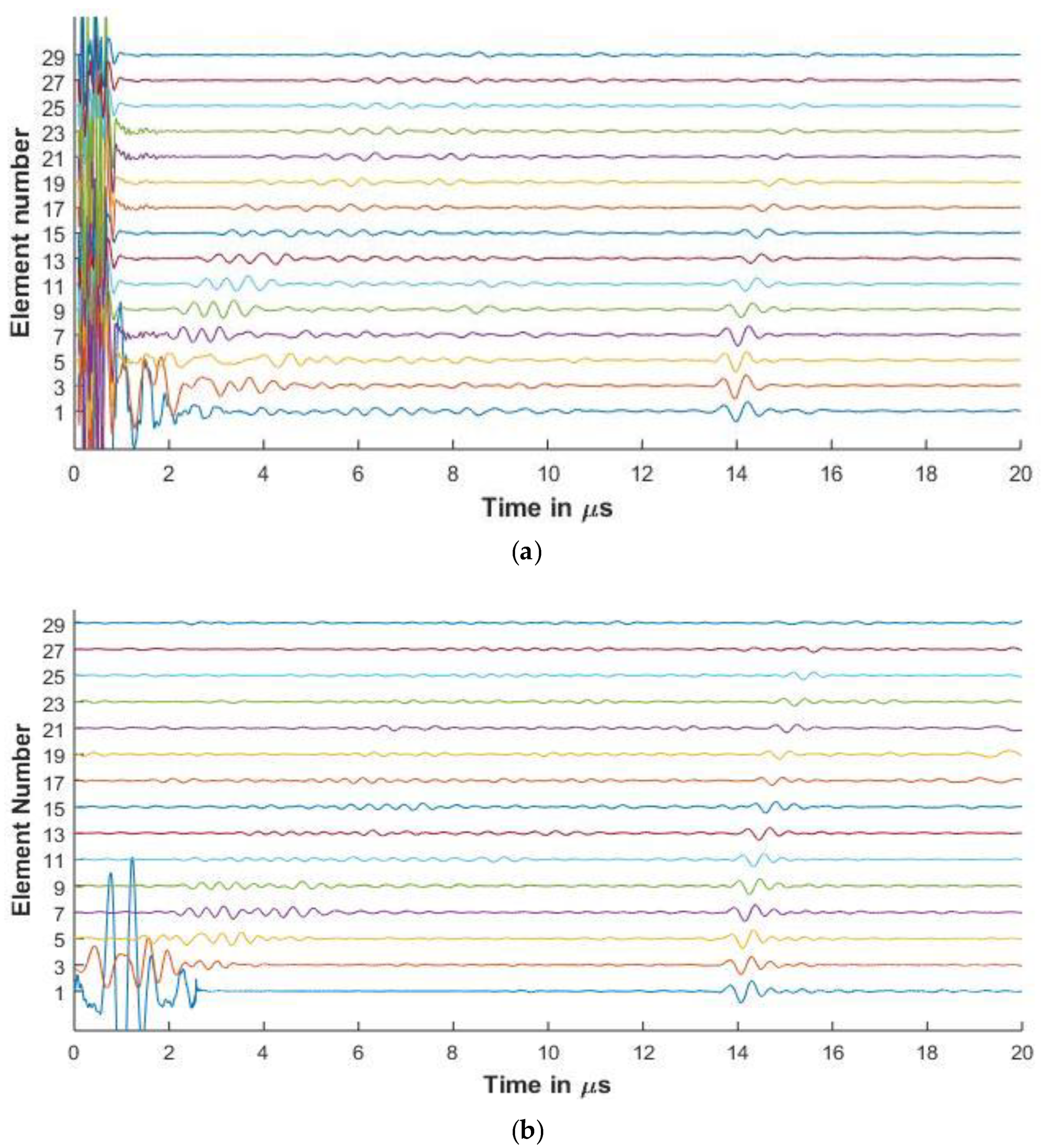
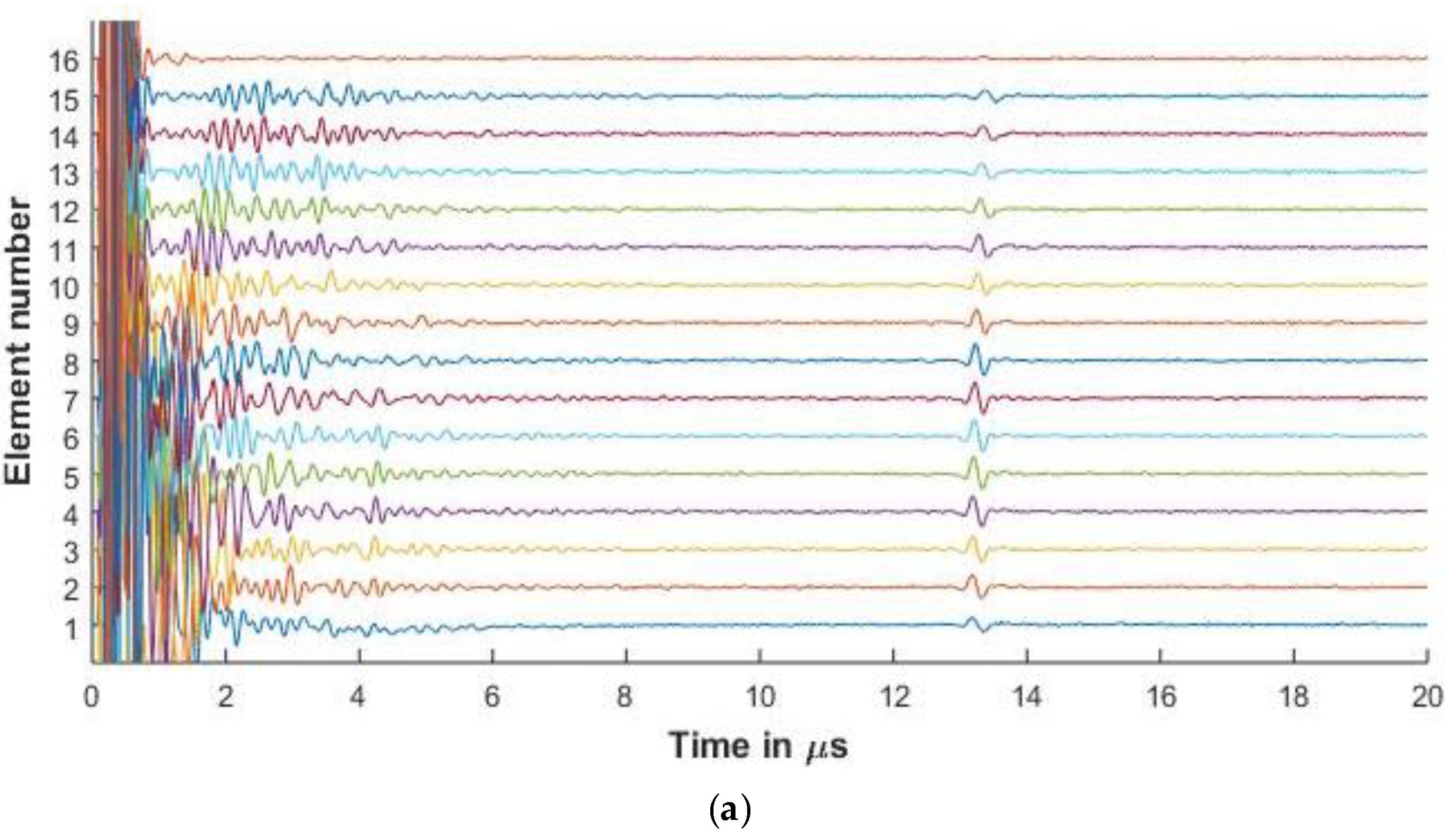
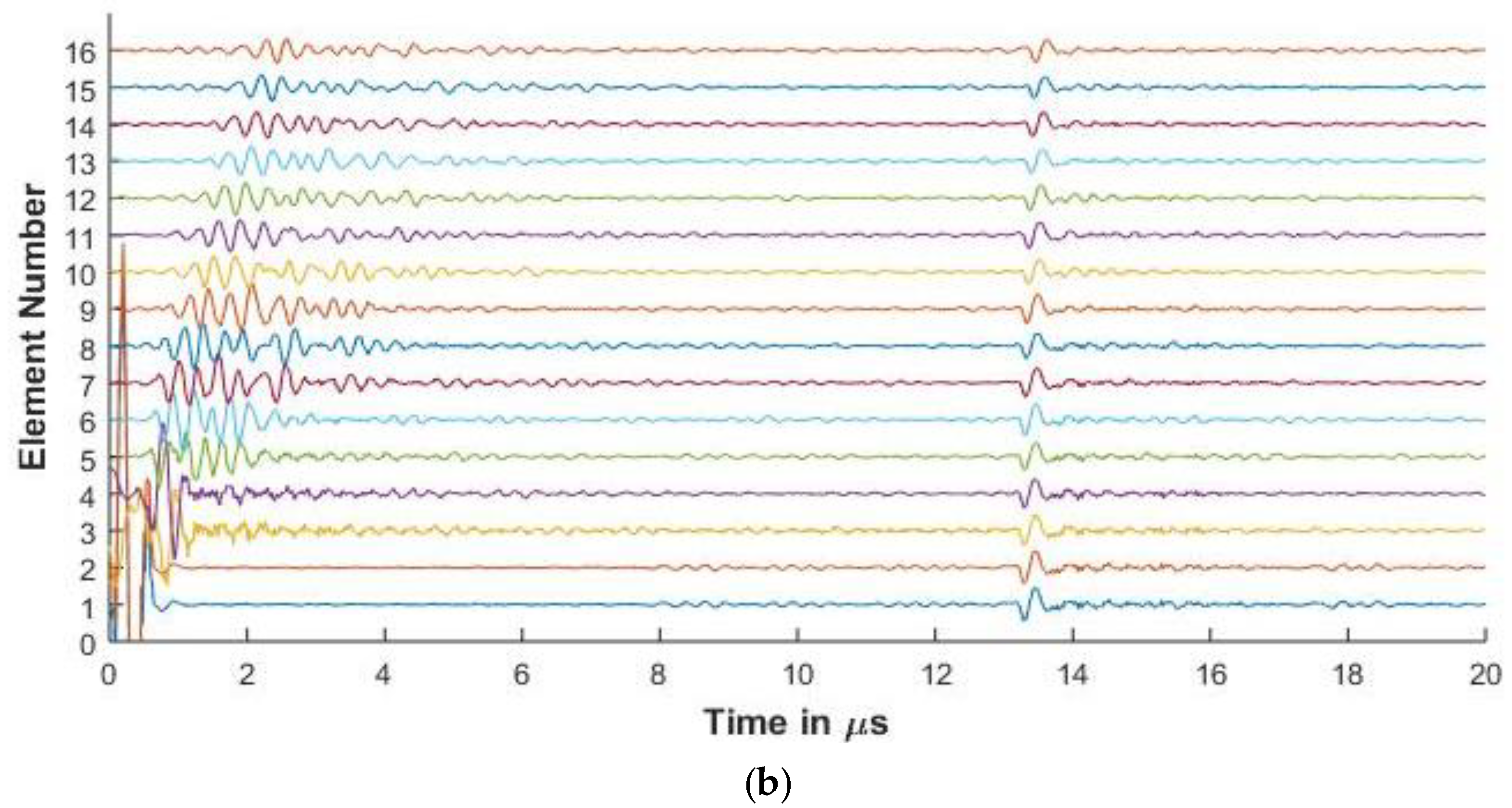
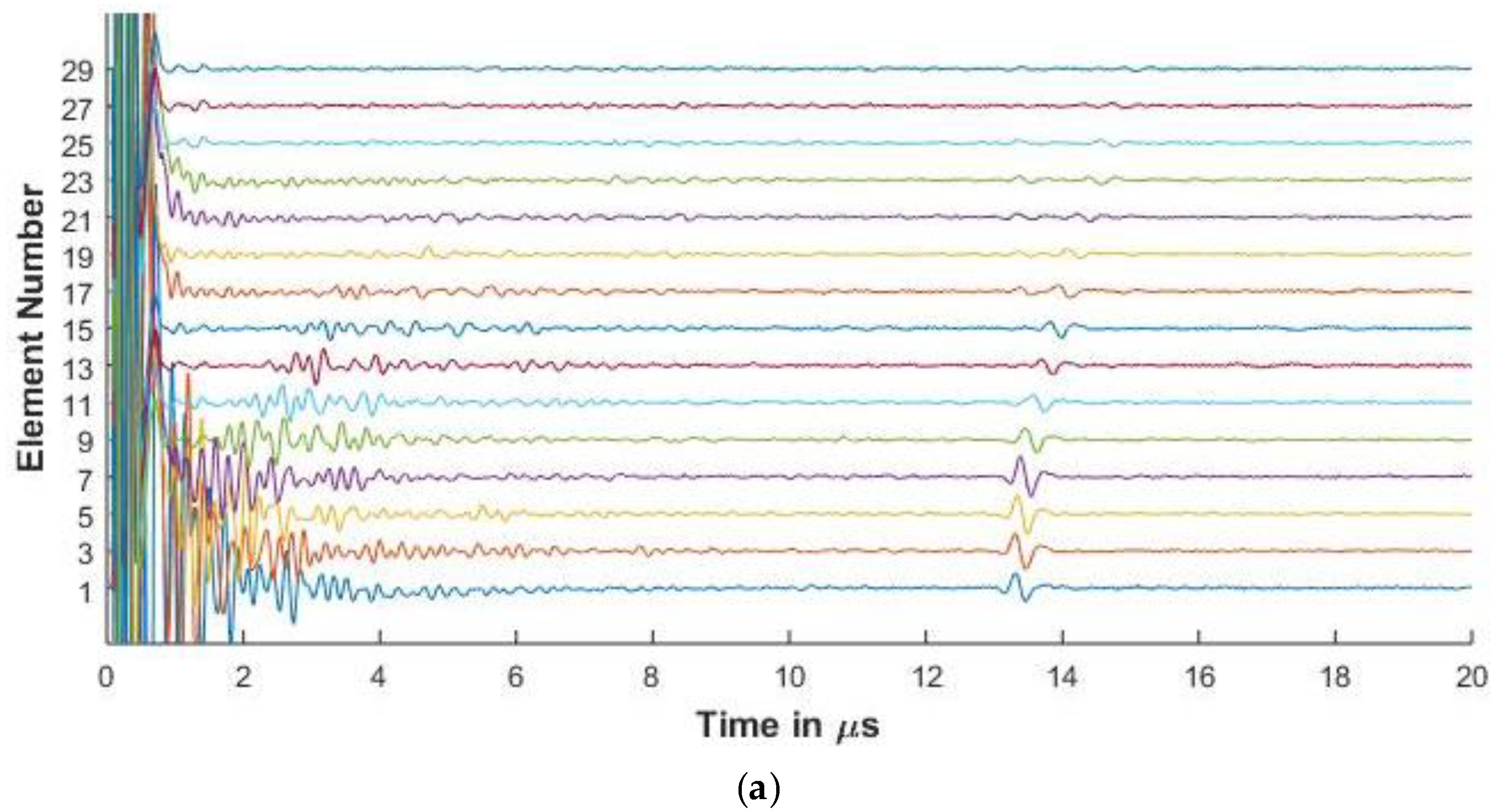
3.3. Comparison of Experimental and Simulated FMC Signals
3.3.1. Experimental and Simulated FMC Signals in Aluminum
3.3.2. Experimental and Simulated Signals in CFRP
4. Discussions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Soutis, C.; Irving, P. Polymer Composites in the Aerospace Industry; Woodhead Publishing: Cambridge, UK, 2019; ISBN 9780857099181. [Google Scholar]
- Quilter, A. Composites in Aerospace Applications; Information Handling Services Markit: London, UK, 2001. [Google Scholar]
- Bossi, R.H.; Giurgiutiu, V. Nondestructive testing of damage in aerospace composites. In Polymer Composites in the Aerospace Industry; Woodhead Publishing: Cambridge, UK, 2015; ISBN 9780857099181. [Google Scholar]
- Drinkwater, B.W.; Wilcox, P.D. Ultrasonic arrays for non-destructive evaluation: A review. NDT E Int. 2006, 39, 525–541. [Google Scholar] [CrossRef]
- Deydier, S.; Leymarie, N.; Calmon, P.; Mengeling, V. Modeling of the ultrasonic propagation into carbon-fiber-reinforced epoxy composites, using a ray theory based homogenization method. In Proceedings of the 9th European Conference on NDT, Berlin, Germany, 25–29 September 2006. [Google Scholar]
- Jezzine, K.; Ségur, D.; Ecault, R.; Dominguez, N. Simulation of ultrasonic inspections of composite structures in the CIVA software platform. In Proceedings of the 19th World Conference on Non-Destructive Testing, Munich, Germany, 13–17 June 2016; pp. 1–8. [Google Scholar]
- Huang, R.; Schmerr, L.W.; Sedov, A. Modeling the radiation of ultrasonic phased-array transducers with Gaussian beams. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 2692–2702. [Google Scholar] [CrossRef] [PubMed]
- Anand, C.; Delrue, S.; Shroff, S.; Groves, R.M.; Benedictus, R. Simulation of Ultrasonic Beam Propagation from Phased Arrays in Anisotropic Media using Linearly Phased Multi Gaussian Beams. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2019, 67, 106–116. [Google Scholar] [CrossRef] [PubMed]
- Knopoff, L. A Matrix Method for Elastic Wave Problems. Bull. Seismol. Soc. Am. 1964, 54, 431–438. [Google Scholar]
- Haskell, N.A. The dispersion of surface waves on multilayered media. In Vincit Veritas: A Portrait of the Life and Work of Norman Abraham Haskell, 1905–1970; American Geophysical Union: Washington, DC, USA, 2011. [Google Scholar]
- Thomson, W.T. Transmission of elastic waves through a stratified solid medium. J. Appl. Phys. 1950. [Google Scholar] [CrossRef]
- Rokhlin, S.I.; Wang, L. Ultrasonic waves in layered anisotropic media: Characterization of multidirectional composites. Int. J. Solids Struct. 2002, 39, 5529–5545. [Google Scholar] [CrossRef]
- Nayfeh, A.H. The general problem of elastic wave propagation in multilayered anisotropic media. J. Acoust. Soc. Am. 1991, 89, 1521–1531. [Google Scholar] [CrossRef]
- Rokhlin, S.I.; Wang, L. Stable recursive algorithm for elastic wave propagation in layered anisotropic media: Stiffness matrix method. J. Acoust. Soc. Am. 2002, 112, 822–834. [Google Scholar] [CrossRef] [PubMed]
- Goodman, J.W. Introduction to Fourier Optics, 2nd ed.; McGraw Hill Higher Eductaion: New York, NY, USA, 1996. [Google Scholar]
- Humeida, Y.; Pinfield, V.J.; Challis, R.E.; Wilcox, P.D.; Li, C. Simulation of ultrasonic array imaging of composite materials with defects. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 1935–1948. [Google Scholar] [CrossRef] [PubMed]
- Lobkis, O.I.; Safaeinili, A.; Chimenti, D.E. Precision ultrasonic reflection studies in fluid-coupled plates. J. Acoust. Soc. Am. 1996, 99, 2727–2736. [Google Scholar] [CrossRef]
- Rokhlin, S.; Chimenti, D.; Nagy, P. Physical Ultrasonics of Composites; Oxford University Press: Oxford, UK, 2011; ISBN 9780195079609. [Google Scholar]
- Wen, J.J.; Breazeale, M.A. A diffraction beam field expressed as the superposition of Gaussian beams. J. Acoust. Soc. Am. 1988, 83, 1752–1756. [Google Scholar] [CrossRef]
- Ding, D.; Zhang, Y.; Liu, J. Some extensions of the Gaussian beam expansion: Radiation fields of the rectangular and the elliptical transducer. J. Acoust. Soc. Am. 2003, 113, 3043. [Google Scholar] [CrossRef]
- Schmerr, L.W. Fundamentals of Ultrasonic Phased Arrays. In Solid Mechanics and Its Applications; Springer International Publishing: Cham, Switzerland, 2015; Volume 215, ISBN 978-3-319-07271-5. [Google Scholar]
- Schmerr, L.W. Fundamentals of Ultrasonic Nondestructive Evaluation a Modeling Approach, 2nd ed.; Springer International Publishing: Cham, Switzerland, 2016; ISBN 9783319304618. [Google Scholar]
- Hosten, B.; Castaings, M. Transfer matrix of multilayered absorbing and anisotropic media. Measurements and simulations of ultrasonic wave propagation through composite materials. J. Acoust. Soc. Am. 1993, 94, 1488–1495. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Centre Frequency (MHz) | Pitch (mm) | Number of Elements | |
|---|---|---|---|
| Array 1 | 2.25 | 1 | 64 |
| Array 2 | 5 | 0.6 | 16 |
| Array 3 | 5 | 1 | 128 |
| Properties | Aluminum (GPa) | Carbon/Epoxy >65% Fibre-Volume Fraction (GPa) |
|---|---|---|
| C11 | 110 | 13.89 (1 + 0.02i) |
| C22 | 110 | 13.89 (1 + 0.02i) |
| C33 | 110 | 121.7 (1 + 0.001i) |
| C12 = C21 | 60 | 6.43 (1 + 0.011i) |
| C13 = C31 | 60 | 5.5 (1 + 0.007i) |
| C23 = C32 | 60 | 5.5 (1 + 0.007i) |
| C44 | 25 | 5.1 (1 + 0.066i) |
| C55 | 25 | 5.1 (1 + 0.066i) |
| C66 | 25 | 3.73 (1 + 0.027i) |
| Frequency (MHz) | Experimental | Simulation |
|---|---|---|
| 2.25 | 40.16 dB | 39.4 dB |
| 5 | 10.87 dB | 11.28 dB |
| Frequency | Experimental | Simulation |
|---|---|---|
| 2.25 | 5.82 dB | 5.5 dB 5.5% |
| 5 | 6.9 dB | 7 dB 1.43% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anand, C.; Groves, R.; Benedictus, R. A Gaussian Beam Based Recursive Stiffness Matrix Model to Simulate Ultrasonic Array Signals from Multi-Layered Media. Sensors 2020, 20, 4371. https://doi.org/10.3390/s20164371
Anand C, Groves R, Benedictus R. A Gaussian Beam Based Recursive Stiffness Matrix Model to Simulate Ultrasonic Array Signals from Multi-Layered Media. Sensors. 2020; 20(16):4371. https://doi.org/10.3390/s20164371
Chicago/Turabian StyleAnand, Chirag, Roger Groves, and Rinze Benedictus. 2020. "A Gaussian Beam Based Recursive Stiffness Matrix Model to Simulate Ultrasonic Array Signals from Multi-Layered Media" Sensors 20, no. 16: 4371. https://doi.org/10.3390/s20164371
APA StyleAnand, C., Groves, R., & Benedictus, R. (2020). A Gaussian Beam Based Recursive Stiffness Matrix Model to Simulate Ultrasonic Array Signals from Multi-Layered Media. Sensors, 20(16), 4371. https://doi.org/10.3390/s20164371