Micromachined Vibrating Ring Gyroscope Architecture with High-Linearity, Low Quadrature Error and Improved Mode Ordering



Abstract
1. Introduction
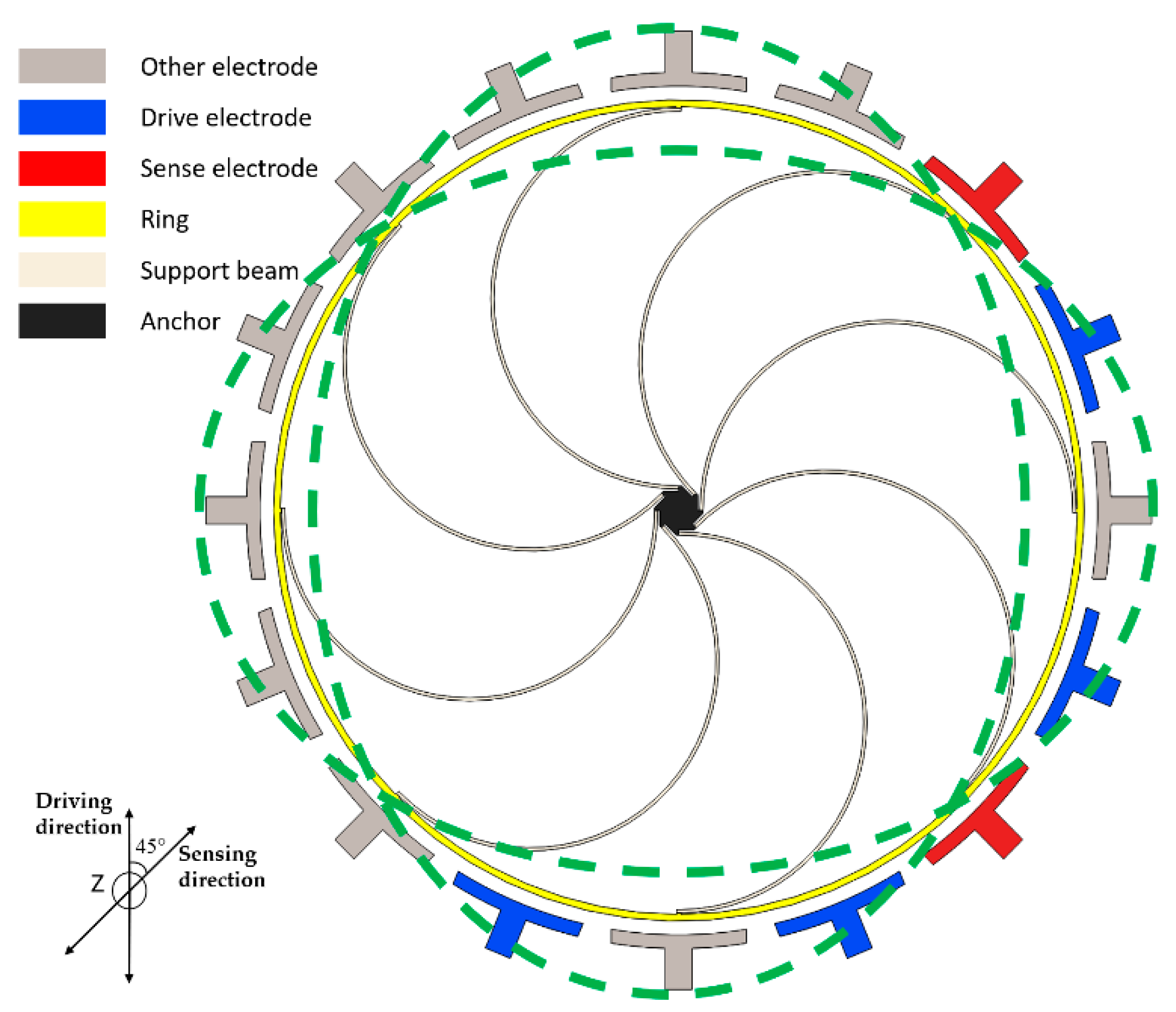
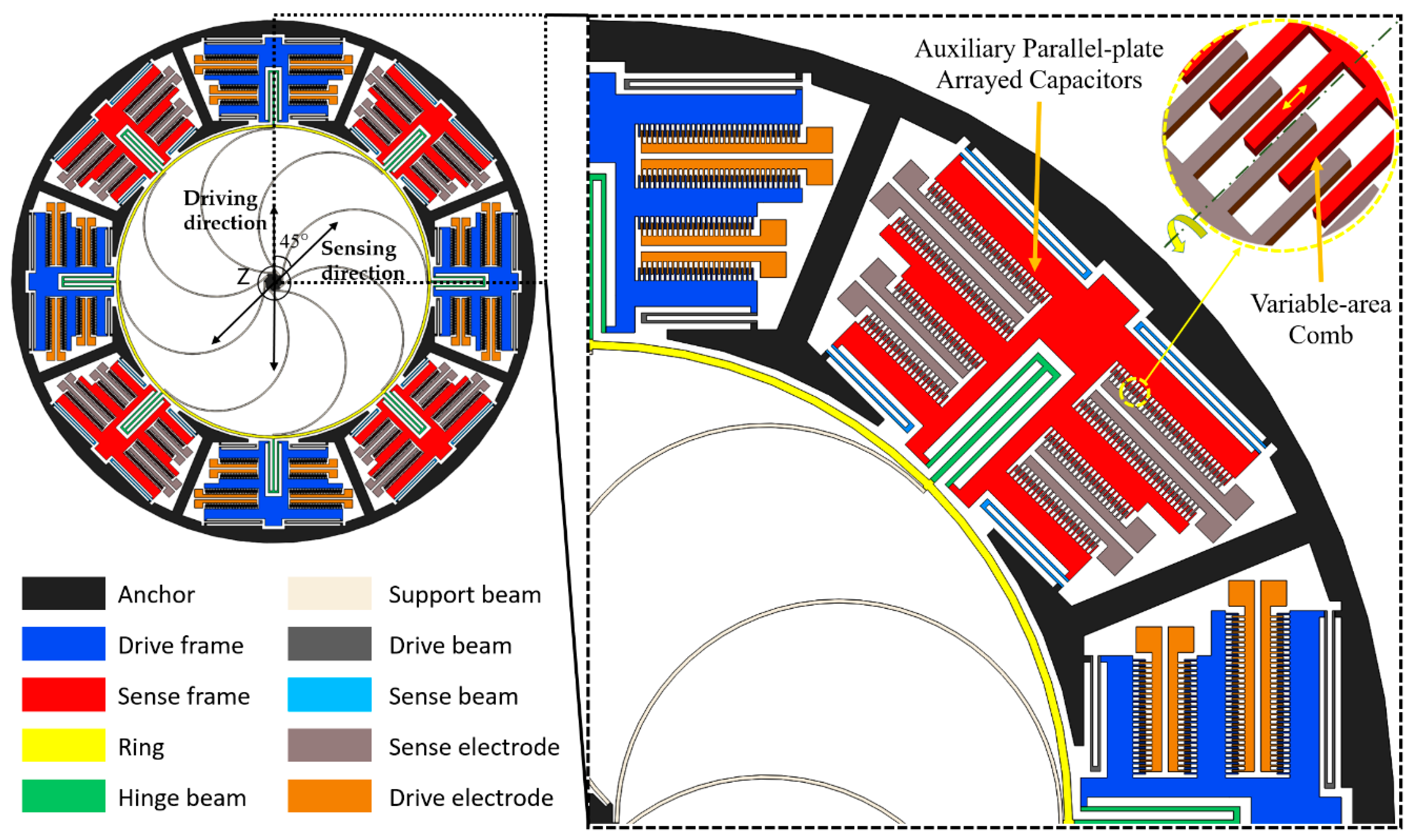
2. Architecture Design
3. Theoretical Analysis
3.1. Normal Modes of HFVRG
3.2. System Equations of HFVRG
3.3. The Stiffness Analysis of Drive/Sense Beam and Hinge Beam
3.4. Discussion of Resonant Frequency and FDR
3.5. Theoretical Calculation
4. FEM Simulation and Analysis
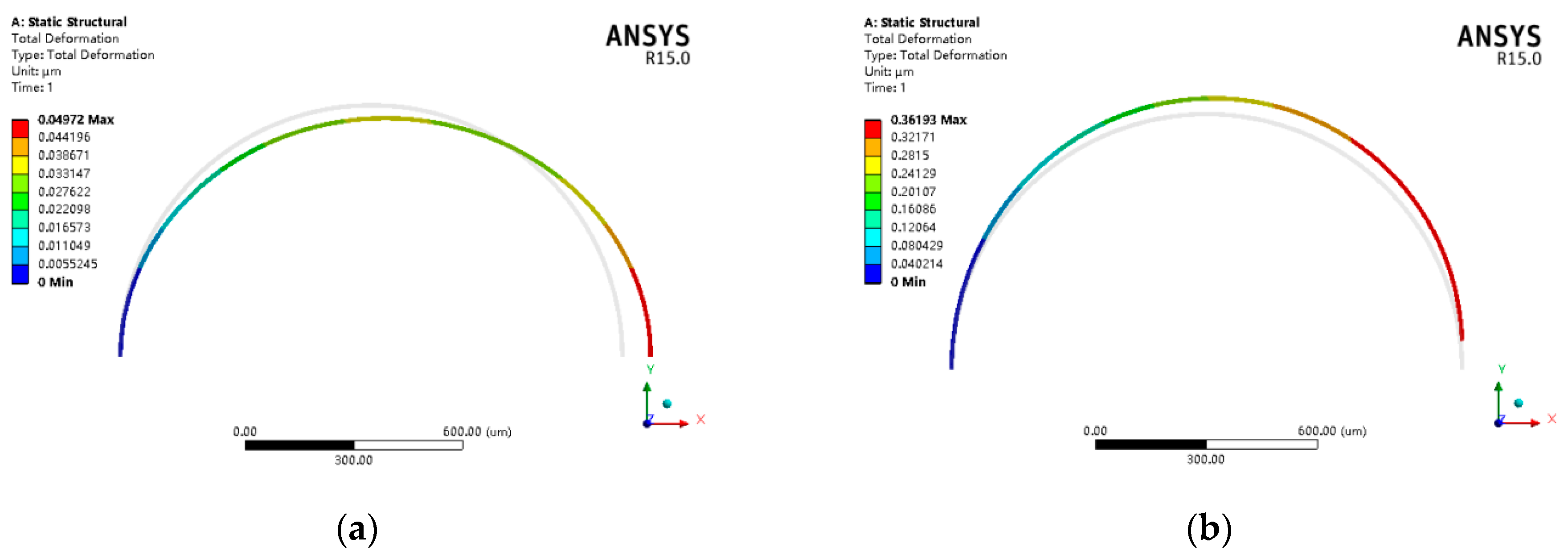
4.1. Analysis of Various Beams
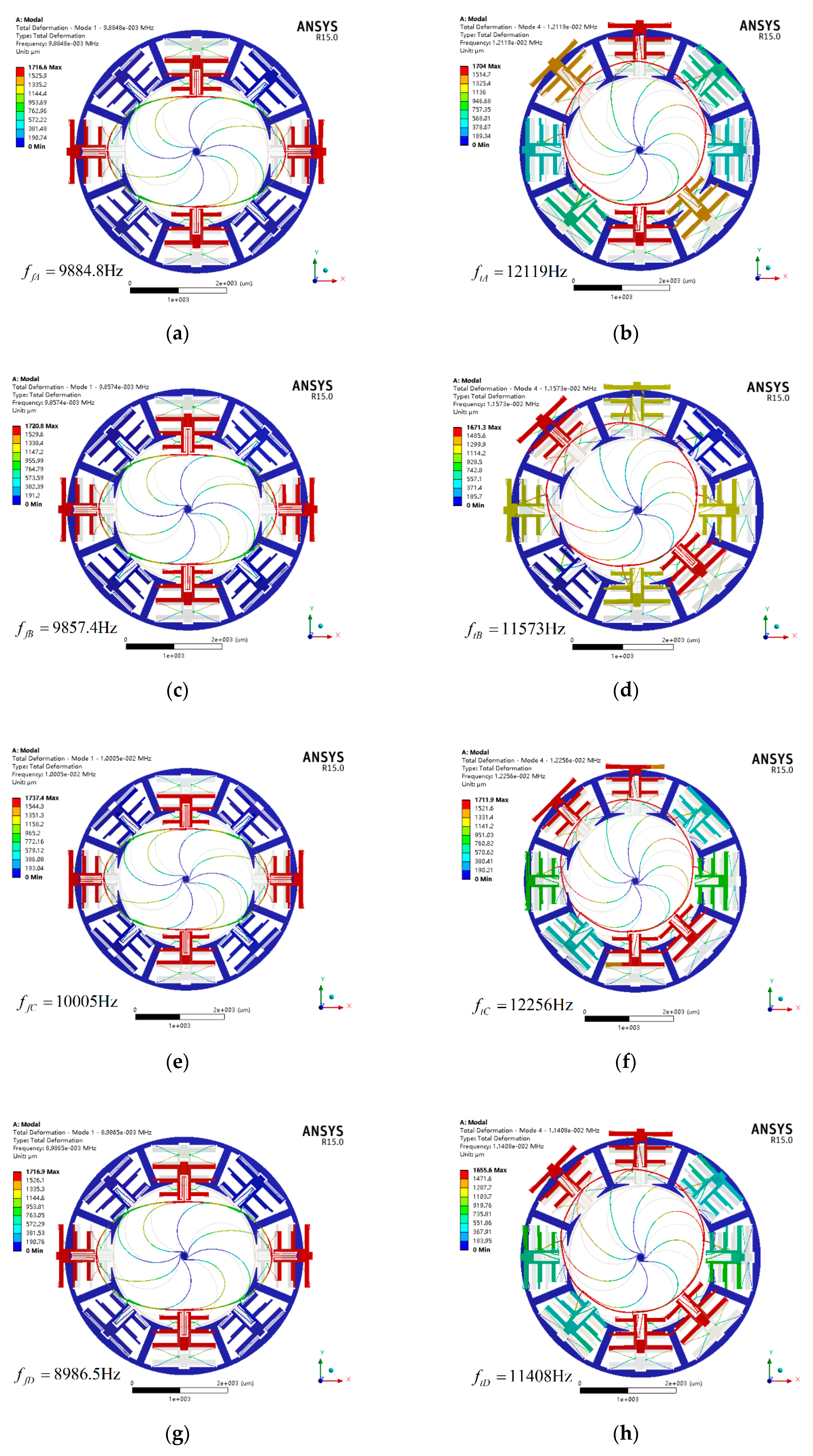
4.2. Modal Analysis and Comparisons
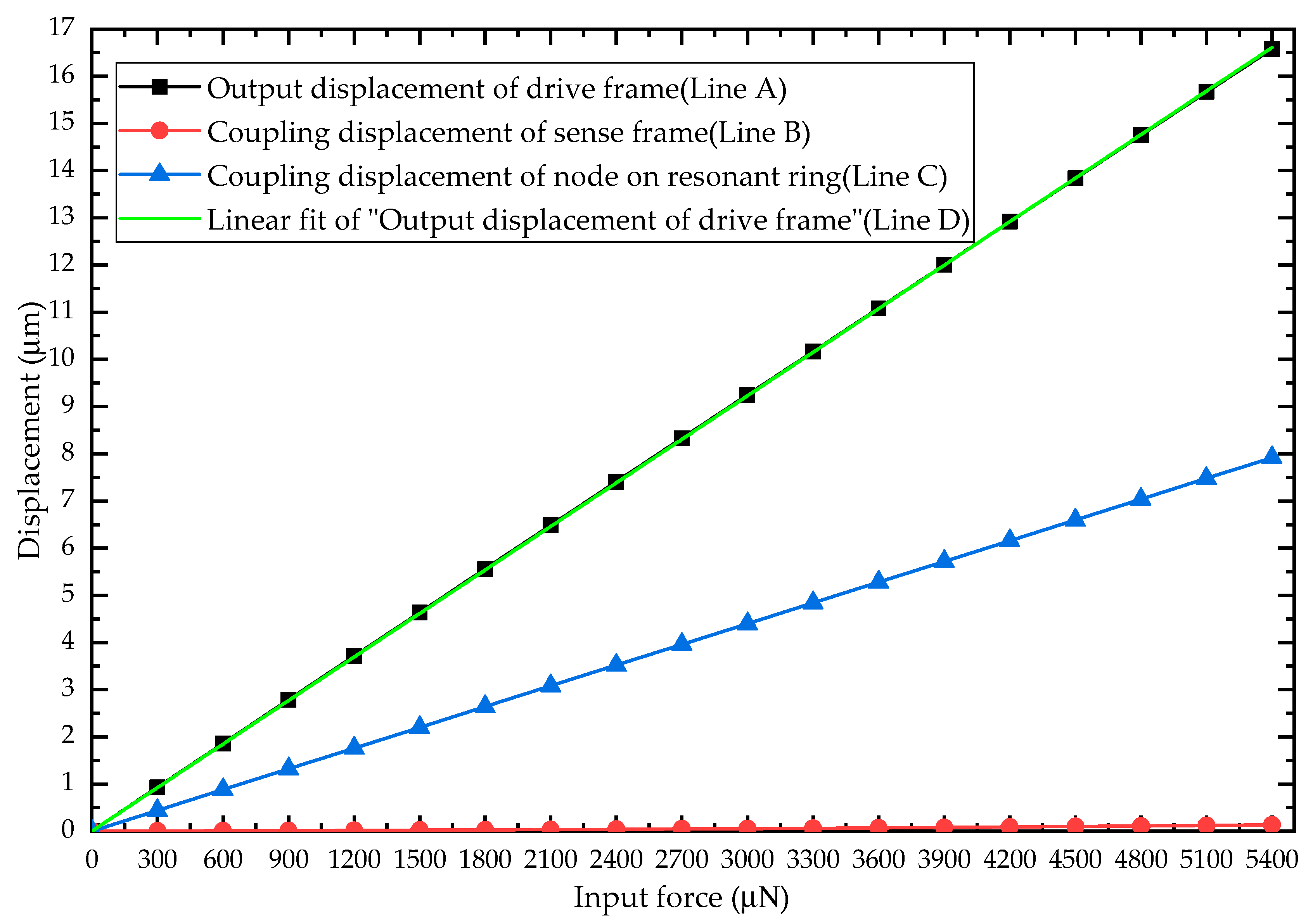
4.3. Nonlinear and Coupling Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Shkel, A.M. Type I and type II micromachined vibratory gyroscopes. In Proceedings of the IEEE/ION Position, Location, and Navigation Symposium, Coronado, CA, USA, 24–27 April 2006; ION: Coronado, CA, USA, 2006; pp. 586–593. [Google Scholar]
- Xia, D.; Yu, C.; Kong, L. The development of micromachined gyroscope structure and circuitry technology. Sensors 2014, 14, 1394–1473. [Google Scholar] [CrossRef] [PubMed]
- Efimovskaya, A.; Lin, Y.-W.; Shkel, A.M. Origami-like 3-D folded MEMS approach for miniature inertial measurement unit. J. Microelectromech. Syst. 2017, 26, 1030–1039. [Google Scholar] [CrossRef]
- Putty, M.W. A micromachined vibrating ring gyroscope. Doctoral Dissertation, University of Michigan, Ann Arbor, MI, USA, 1995. [Google Scholar]
- Ayazi, F.; Najafi, K. A HARPSS polysilicon vibrating ring gyroscope. J. Microelectromech. Syst. 2001, 10, 169–179. [Google Scholar] [CrossRef]
- Chang, C.O.; Chang, G.E.; Chou, C.S.; Chang Chien, W.T.; Chen, P.C. In-plane free vibration of a single-crystal silicon ring. Int. J. Solids Struct. 2008, 45, 6114–6132. [Google Scholar] [CrossRef]
- Wang, J.; Chen, L.; Zhang, M.; Chen, D. A micro-machined vibrating ring gyroscope with highly symmetric structure for harsh environment. In Proceedings of the 2010 5th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Xiamen, China, 20–23 January 2010. [Google Scholar]
- Yoon, S.W.; Lee, S.; Najafi, K. Vibration sensitivity analysis of MEMS vibratory ring gyroscopes. Sens. Actuators A Phys. 2011, 171, 163–177. [Google Scholar] [CrossRef]
- Yoon, S.; Park, U.; Rhim, J.; Yang, S.S. Tactical grade MEMS vibrating ring gyroscope with high shock reliability. Microelectron. Eng. 2015, 142, 22–29. [Google Scholar] [CrossRef]
- Zaman, M.F.; Sharma, A.; Amini, B.V.; Ayazi, F. The resonating star gyroscope. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems, Miami Beach, FL, USA, 30 January–3 February 2005. [Google Scholar]
- Zaman, M.F.; Sharma, A.; Ayazi, F. The resonating star gyroscope: A novel multiple-shell silicon gyroscope with sub-5 deg/hr Allan deviation bias instability. IEEE Sens. J. 2009, 9, 616–624. [Google Scholar] [CrossRef]
- Chen, L.; Chen, D.; Wang, J. The design and analysis of a robust micro-machined vibrating ring gyroscope. In Proceedings of the 2008 International Conference on Optical Instruments and Technology: MEMS/NEMS Technology and Applications, Beijing, China, 16–19 November 2008. [Google Scholar]
- Chen, D.; Zhang, M.; Wang, J. An electrostatically actuated micromachined vibrating ring gyroscope with highly symmetric support beams. In Proceedings of the IEEE SENSORS 2010 Conference, Waikoloa, HI, USA, 1–4 November 2010. [Google Scholar]
- Tao, Y.; Wu, X.; Xiao, D.; Wu, Y.; Cui, H.; Xi, X.; Zhu, B. Design, analysis and experiment of a novel ring vibratory gyroscope. Sens. Actuators A Phys. 2011, 168, 286–299. [Google Scholar] [CrossRef]
- Cao, H.; Liu, Y.; Kou, Z.; Zhang, Y.; Shao, X.; Gao, J.; Huang, K.; Shi, Y.; Tang, J.; Shen, C.; et al. Design, fabrication and experiment of double U-beam MEMS vibration ring gyroscope. Micromachines 2019, 10, 186. [Google Scholar] [CrossRef]
- Chikovani, V.V.; Tsiruk, H.V. Shock resistance of differential type ring-like resonator vibratory gyroscope. Electron. Control. Syst. 2014, 4, 79–83. [Google Scholar] [CrossRef]
- Hu, Z.X.; Gallacher, B.J.; Burdess, J.S.; Fell, C.P.; Townsend, K. A parametrically amplified MEMS rate gyroscope. Sens. Actuators A Phys. 2011, 167, 249–260. [Google Scholar] [CrossRef]
- Nitzan, S.H.; Zega, V.; Li, M.; Ahn, C.H.; Corigliano, A.; Kenny, T.W.; Horsley, D.A. Self-induced parametric amplification arising from nonlinear elastic coupling in a micromechanical resonating disk gyroscope. Sci. Rep. 2015, 5, 9036. [Google Scholar] [CrossRef] [PubMed]
- Polunin, P.M.; Shaw, S.W. Self-induced parametric amplification in ring resonating gyroscopes. Int. J. Non-Linear Mech. 2017, 94, 300–308. [Google Scholar] [CrossRef]
- Gallacher, B.J.; Hedley, J.; Burdess, J.S.; Harris, A.J.; Rickard, A.; King, D.O. Electrostatic tuning of a micro-ring gyroscope. In Proceedings of the Technical Proceedings 2004 NSTI Nanotechnology Conference and Trade Show, Boston, MA, USA, 7–11 March 2004; pp. 430–433. [Google Scholar]
- Gallacher, B.J.; Hedley, J.; Burdess, J.S.; Harris, A.J.; Rickard, A.; King, D.O. Electrostatic correction of structural imperfections present in a microring gyroscope. J. Microelectromech. Syst. 2005, 14, 221–234. [Google Scholar] [CrossRef]
- Hu, Z.X.; Gallacher, B.J.; Burdess, J.S.; Bowles, S.R.; Grigg, H.T.D. A systematic approach for precision electrostatic mode tuning of a MEMS gyroscope. J. Micromech. Microeng. 2014, 24, 125003. [Google Scholar] [CrossRef]
- Martynenko, Y.G.; Merkuryev, I.V.; Podalkov, V.V. Control of nonlinear vibrations of vibrating ring microgyroscope. Mech. Solids 2008, 43, 379–390. [Google Scholar] [CrossRef]
- El-Sayed, A.M.; Ghoneima, M.; Mahmoud, M.A.E. Modeling of nonlinearities in vibratory ring gyroscopes. In Proceedings of the 2013 Second International Japan-Egypt Conference on Electronics, Communications and Computers (JEC-ECC), Cairo, Egypt, 17–19 December 2013. [Google Scholar]
- Chouvion, B.; McWilliam, S.; Popov, A.A. Effect of nonlinear electrostatic forces on the dynamic behaviour of a capacitive ring-based Coriolis vibrating gyroscope under severe shock. Mech. Syst. Signal Process. 2018, 106, 395–412. [Google Scholar] [CrossRef]
- Liang, D.D.; Yang, X.D.; Zhang, W.; Ren, Y.; Yang, T.Z. Linear, nonlinear dynamics, and sensitivity analysis of a vibratory ring gyroscope. Theor. Appl. Mech. Lett. 2018, 8, 393–403. [Google Scholar] [CrossRef]
- Maslov, A.A.; Maslov, D.A.; Merkuryev, I.V.; Podalkov, V.V. Dynamics of the ring micromechanical gyroscope taking into account the nonlinear stiffness of the suspension. In Proceedings of the 2019 26th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), Saint Petersburg, Russia, 27–29 May 2019. [Google Scholar]
- Sieberer, S.; McWilliam, S.; Popov, A.A. Nonlinear electrostatic effects in MEMS ring-based rate sensors under shock excitation. Int. J. Mech. Sci. 2019, 157, 485–497. [Google Scholar] [CrossRef]
- Trusov, A.A.; Schofield, A.R.; Shkel, A.M. Micromachined rate gyroscope architecture with ultra-high quality factor and improved mode ordering. Sens. Actuators A Phys. 2011, 165, 26–34. [Google Scholar] [CrossRef]
- Guan, Y.; Gao, S.; Jin, L.; Cao, L. Design and vibration sensitivity of a MEMS tuning fork gyroscope with anchored coupling mechanism. Microsyst. Technol. 2015, 22, 247–254. [Google Scholar] [CrossRef]
- Guan, Y.; Gao, S.; Liu, H.; Jin, L.; Niu, S. Design and vibration sensitivity analysis of a MEMS tuning fork gyroscope with an anchored diamond coupling mechanism. Sensors 2016, 16, 468. [Google Scholar] [CrossRef] [PubMed]
- Yoon, S.W. Vibration Isolation and Shock Protection for MEMS. Doctoral Dissertation, University of Michigan, Ann Arbor, MI, USA, 2009. [Google Scholar]
- Li, Z.; Gao, S.; Jin, L.; Liu, H.; Guan, Y.; Peng, S. Design and mechanical sensitivity analysis of a MEMS tuning fork gyroscope with an anchored leverage mechanism. Sensors 2019, 19, 3455. [Google Scholar] [CrossRef] [PubMed]
- Fan, K.; Che, L.; Xiong, B.; Wang, Y. A silicon micromachined high-shock accelerometer with a bonded hinge structure. J. Micromech. Microeng. 2007, 17, 1206–1210. [Google Scholar] [CrossRef]
- Ren, J.; Liu, C.-Y.; Li, M.-H.; Chen, C.-C.; Chen, C.-Y.; Li, C.-S.; Li, S.-S. A mode-matching 130-kHz ring-coupled gyroscope with 225 ppm initial driving/sensing mode frequency splitting. In Proceedings of the 2015 Transducers—2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS 2015), Anchorage, AK, USA, 21–25 June 2015. [Google Scholar]
- Kim, J.; Cho, D.-I.D.; Muller, R.S. Why is (111) silicon a better mechanical material for MEMS? In Transducers’ 01 Eurosensors XV; Springer: Berlin/Heidelberg, Germany, 2001; pp. 662–665. [Google Scholar]
- Qin, Z.; Gao, Y.; Jia, J.; Ding, X.; Huang, L.; Li, H. The Effect of the Anisotropy of Single Crystal Silicon on the Frequency Split of Vibrating Ring Gyroscopes. Micromachines 2019, 10, 126. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Radius of resonant ring in all types () () | 1500 |
| Width of resonant ring in all types () () | 25 |
| Radius of support beam in all types () () | 690 |
| Width of support beam in all types () () | 12 |
| Length of drive/sense beam 1 in type A, B and C [] () | [345,16,345] |
| Width of drive/sense beam 1 in type A, B and C [] () | [8,16,8] |
| Length of drive/sense beam 1 in type D [] () | [345,18,345] |
| Width of drive/sense beam 1 in type D [] () | [7,16,7] |
| Length of drive/sense beam 2 in all types [] () | [537,16,537] |
| Width of drive/sense beam 2 in all types [] () | [8,16,8] |
| Length of hinge beam in type A, C and D [] () | [505,30,485] |
| Width of hinge beam in type A, C and D [] () | [18,20,14] |
| Length of hinge beam in type B [] () | [505,32,485] |
| Width of hinge beam in type B [ ] ( ) | [18,20,12] |
| Height of the whole structure in all types () () | 80 |
| Mass of resonant ring in all types () () | |
| Mass of drive/sense frame in type A, B and D () () | |
| Mass of drive/sense frame in type C () () |
| Parameter | Young’s Modulus (Pa) | Poisson’s Ratio | Density ( ) |
|---|---|---|---|
| Values | 0.28 | 2330 |
| Parameter | Type A | Type B | Type C | Type D |
|---|---|---|---|---|
| Stiffness of resonant ring () () | 164.75 | |||
| Normal stiffness of support beam () () | 20.13 | |||
| Tangential stiffness of support beam () () | 3.80 | |||
| The stiffness along to the of support beam () () | 11.96 | |||
| Stiffness of drive/sense beam 1 () () | 84.06 | 84.06 | 84.06 | 56.25 |
| Stiffness of drive/sense beam 2 () () | 22.36 | |||
| Stiffness of hinge beam () () | 314.82 | 245.29 | 314.82 | 314.82 |
| Resonant frequency of flexural mode of HFVRG () (Hz) | 9551 | 9551 | 9685 | 8528 |
| Resonant frequency of translation mode of HFVRG () (Hz) | 12,652 | 11,863 | 12,800 | 12,025 |
| Frequency difference ratio (FDR) () | 32.46% | 24.20% | 32.16% | 41.01% |
| Parameter | Type A | Type B | Type C | Type D |
|---|---|---|---|---|
| Resonant frequency of flexural mode (Hz) | 9884.8 | 9857.4 | 10,005 | 8986.5 |
| Resonant frequency of translation mode (Hz) | 12,119 | 11,573 | 12,256 | 11,408 |
| Frequency difference ratio (FDR) | 22.60% | 17.40% | 22.50% | 26.95% |
| Type | Mode Shape | Theoretical Value | Simulation Value | Error Rate |
|---|---|---|---|---|
| Type A | Flexural mode | 9551 | 9884.8 | −3.50% |
| Translation mode | 12,652 | 12,119 | 4.21% | |
| Type B | Flexural mode | 9551 | 9857.4 | −3.21% |
| Translation mode | 11,863 | 11,573 | 2.44% | |
| Type C | Flexural mode | 9685 | 10,005 | −3.40% |
| Translation mode | 12,800 | 12,256 | 4.25% | |
| Type D | Flexural mode | 8528 | 8986.5 | −5.38% |
| Translation mode | 12,025 | 11,408 | 5.13% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Gao, S.; Jin, L.; Liu, H.; Niu, S. Micromachined Vibrating Ring Gyroscope Architecture with High-Linearity, Low Quadrature Error and Improved Mode Ordering. Sensors 2020, 20, 4327. https://doi.org/10.3390/s20154327
Li Z, Gao S, Jin L, Liu H, Niu S. Micromachined Vibrating Ring Gyroscope Architecture with High-Linearity, Low Quadrature Error and Improved Mode Ordering. Sensors. 2020; 20(15):4327. https://doi.org/10.3390/s20154327
Chicago/Turabian StyleLi, Zezhang, Shiqiao Gao, Lei Jin, Haipeng Liu, and Shaohua Niu. 2020. "Micromachined Vibrating Ring Gyroscope Architecture with High-Linearity, Low Quadrature Error and Improved Mode Ordering" Sensors 20, no. 15: 4327. https://doi.org/10.3390/s20154327
APA StyleLi, Z., Gao, S., Jin, L., Liu, H., & Niu, S. (2020). Micromachined Vibrating Ring Gyroscope Architecture with High-Linearity, Low Quadrature Error and Improved Mode Ordering. Sensors, 20(15), 4327. https://doi.org/10.3390/s20154327