Precipitable Water Vapor Retrieval from Shipborne GNSS Observations on the Korean Research Vessel ISABU


Abstract
1. Introduction
2. Data and Processing
2.1. Shipborne GNSS Data
2.2. Radiosonde and Satellite Data
3. Comparison of PWVs on the Ground
4. Comparison of PWVs on the Ocean
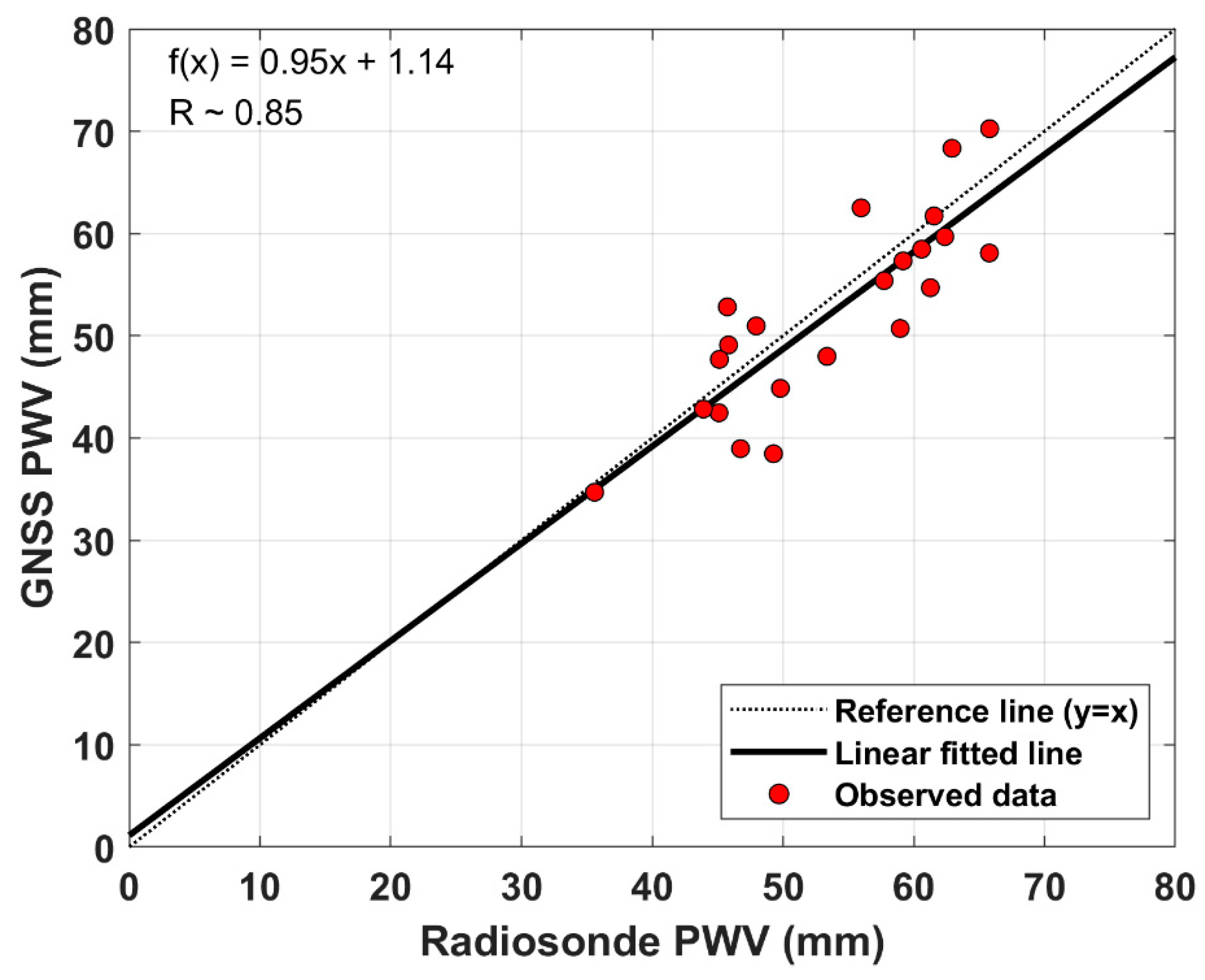
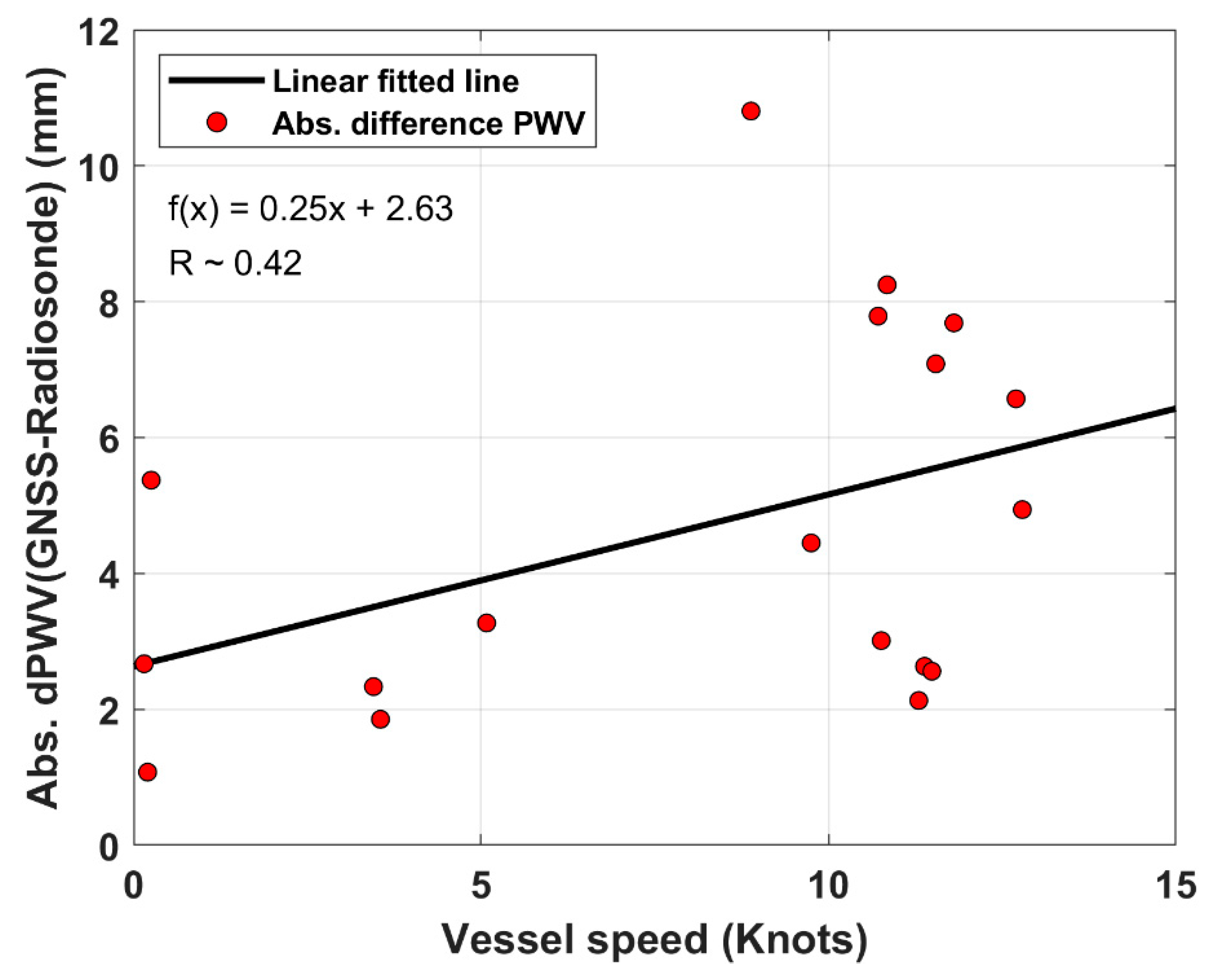
4.1. Comparisons of GNSS and Radiosonde
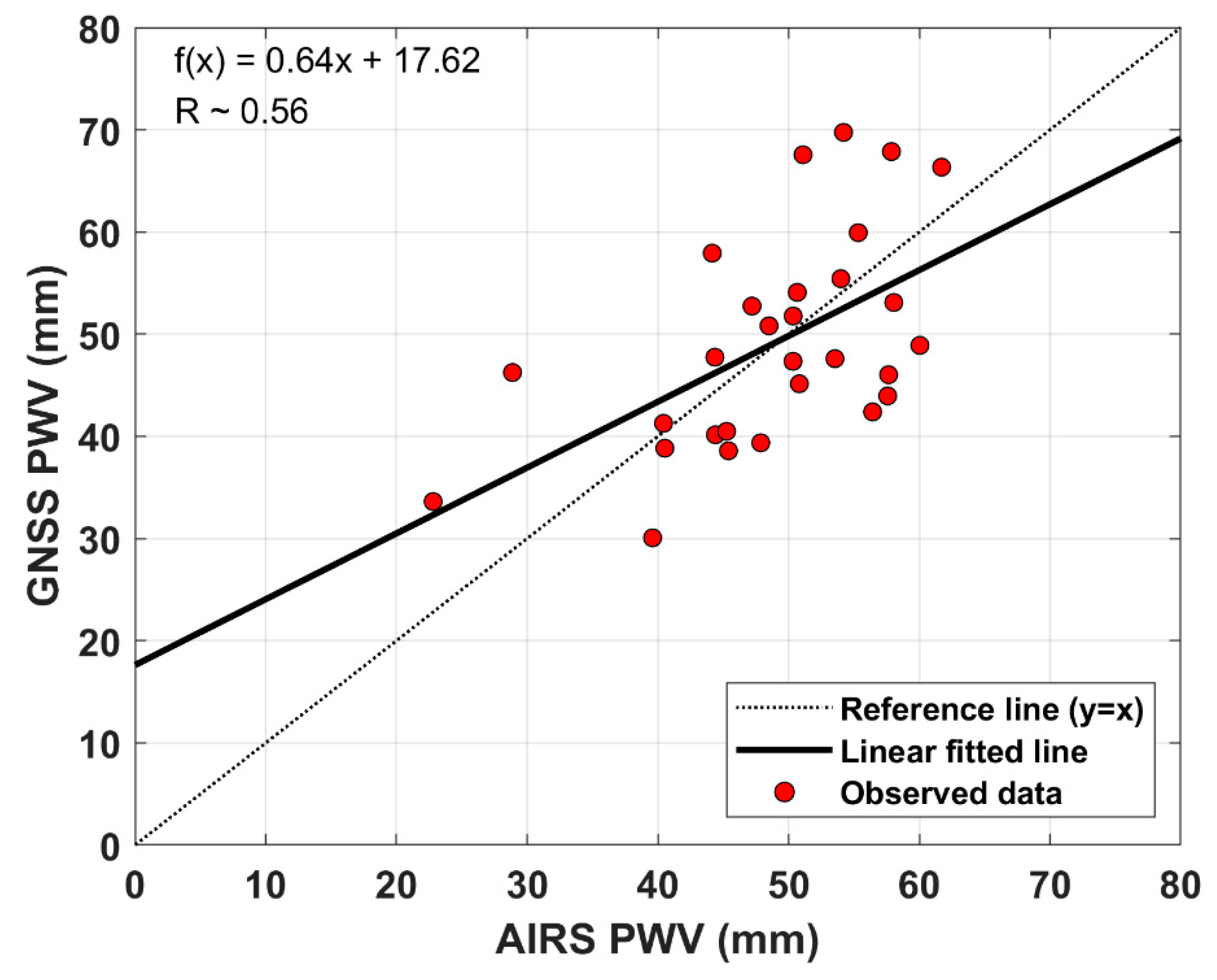
4.2. Comparisons of GNSS and AIRS
5. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Niell, A.E.; Coster, A.J.; Solheim, F.S.; Mendes, V.B.; Toor, P.C.; Langley, R.B.; Upham, C.A. Comparison of Measurements of Atmospheric Wet Delay by Radiosonde, Water Vapor Radiometer, GPS, and VLBI. J. Atmos. Ocean. Technol. 2001, 18, 830–850. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L. Systematic Errors in Global Radiosonde Precipitable Water Data from Comparisons with Ground-Based GPS Measurements. J. Clim. 2008, 21, 2218–2238. [Google Scholar] [CrossRef]
- Perdiguer-López, R.; Berné-Valero, J.L.; Garrido-Villén, N. Application of GNSS Methodologies to Obtain Precipitable Water Vapor (PWV) and Its Comparison with Radiosonde Data. Proceedings 2019, 19, 24. [Google Scholar] [CrossRef]
- Baelen, J.V.; Aubagnac, J.P.; Dabas, A. Comparison of Near–Real Time Estimates of Integrated Water Vapor Derived with GPS, Radiosondes, and Microwave Radiometer. J. Atmos. Ocean. Technol. 2005, 22, 201–210. [Google Scholar] [CrossRef]
- Renju, R.; Raju, C.S.; Mathew, N.; Antony, T.; Moorthy, K.K. Microwave radiometer observations of interannual water vapor variability and vertical structure over a tropical station. J. Geophys. Res. Atmos. 2015, 120, 4585–4599. [Google Scholar] [CrossRef]
- Fionda, E.; Cadeddu, M.; Mattioli, V.; Pacione, R. Intercomparison of Integrated Water Vapor Measurements at High Latitudes from Co-Located and Near-Located Instruments. Remote Sens. 2019, 11, 2130. [Google Scholar] [CrossRef]
- Li, Z.; Muller, J.; Cross, P. Comparison of precipitable water vapor derived from radiosonde, GPS and Moderate-Resolution Imaging Spectroradiometer measurements. J. Geophys. Res. 2003, 108, 4651. [Google Scholar] [CrossRef]
- Fernandez, L.I.; Salio, P.; Natali, M.P.; Meza, A.M. Estimation of precipitable water vapour from GPS measurements in Argentina: Validation and qualitative analysis of results. Adv. Space Res. 2010, 46, 879–894. [Google Scholar] [CrossRef]
- He, J.; Liu, Z. Water Vapor Retrieval from MODIS NIR Channels Using Ground-Based GPS Data. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3726–3737. [Google Scholar] [CrossRef]
- Sakai, T.; Nagai, T.; Nakazato, M.; Matsumura, T.; Orikasa, N.; Shoji, Y. Comparisons of Raman Lidar Measurements of Tropospheric Water Vapor Profiles with Radiosondes, Hygrometers on the Meteorological Observation Tower, and GPS at Tsukuba, Japan. J. Atmos. Ocean. Technol. 2007, 24, 1407–1423. [Google Scholar] [CrossRef]
- Barnes, J.E.; Kaplan, T.; Vömel, H.; Read, W.G. NASA/Aura/Microwave Limb Sounder water vapor validation at Mauna Loa Observatory by Raman lidar. J. Geophys. Res. 2008, 113, D15S03. [Google Scholar] [CrossRef]
- Kwon, H.T.; Iwabuchi, T.; Lim, G.H. Comparison of precipitable water derived from ground-based GPS measurements with radiosonde observations over the Korean Peninsula. J. Meteorol. Soc. Jpn. 2007, 85, 733–746. [Google Scholar] [CrossRef]
- Ha, J.; Park, K.D.; Kim, K.; Kim, Y.H. Comparison of Atmospheric Water Vapor Profiles Obtained by GPS, MWR, and Radiosonde. Asia Pac. J. Atmos. Sci. 2010, 46, 233–241. [Google Scholar] [CrossRef]
- Sohn, D.H.; Park, K.D.; Won, J.; Cho, J.; Roh, K.M. Comparison of the Characteristics of Precipitable Water Vapor Measured by Global Positioning System and Microwave Radiometer. J. Astron. Space Sci. 2012, 29, 1–10. [Google Scholar] [CrossRef]
- Rocken, C.; Johnson, J.; Hove, T.V.; Iwabuchi, T. Atmospheric water vapor and geoid measurements in the open ocean with GPS. Geophys. Res. Lett. 2005, 32, L12813. [Google Scholar] [CrossRef]
- Fujita, M.; Kimura, F.; Yoneyama, K.; Yoshizaki, M. Verification of precipitable water vapor estimated from shipborne GPS measurements. Geophys. Res. Lett. 2008, 35, L13803. [Google Scholar] [CrossRef]
- Kealy, J.; Foster, J.; Businger, S. GPS meteorology: An investigation of ocean-based precipitable water estimates. J. Geophys. Res. 2012, 117, D17303. [Google Scholar] [CrossRef]
- Boniface, K.; Champollion, C.; Chery, J.; Ducrocq, V.; Rocken, C.; Doerflinger, E.; Collard, P. Potential of shipborne GPS atmospheric delay data for prediction of Mediterranean intense weather events. Atmos. Sci. Lett. 2012, 13, 250–256. [Google Scholar] [CrossRef]
- Fan, S.J.; Zang, J.F.; Peng, X.Y.; Wu, S.Q.; Liu, Y.X.; Zhang, K.F. Validation of Atmospheric Water Vapor Derived from Ship-Borne GPS Measurements in the Chinese Bohai Sea. Terr. Atmos. Ocean. Sci. 2016, 27, 213–220. [Google Scholar] [CrossRef][Green Version]
- Shoji, Y.; Sato, K.; Yabuki, M.; Tsuda, T. PWV Retrieval over the ocean using shipborne GNSS receivers with MADOCA real-time orbits. Sola 2016, 12, 265–271. [Google Scholar] [CrossRef]
- Shoji, Y.; Sato, K.; Yabuki, M.; Tsuda, T. Comparison of shipborne GNSS-derived precipitable water vapor with radiosonde in the western North Pacific and in the seas adjacent to Japan. Earth Planets Space 2017, 69. [Google Scholar] [CrossRef]
- Wang, J.; Wu, Z.; Semmling, M.; Zus, F.; Gerland, S.; Ramatschi, M.; Ge, M.; Wickert, J.; Schuh, H. Retrieving precipitable water vapor from shipborne multi-GNSS observations. Geophys. Res. Lett. 2019, 46, 5000–5008. [Google Scholar] [CrossRef]
- Korea Institute of Ocean Science and Technology (KIOST) Research Vessel. Available online: https://www.kiost.ac.kr/eng/sub03_02_01.do (accessed on 1 October 2019).
- Choi, B.K.; Roh, K.M.; Cho, S.K.; Park, J.U.; Park, P.H.; Lee, S.J. Development of the Kinematic Global Positioning System Precise Point Positioning Method Using 3-Pass Filter. J. Astron. Space Sci. 2012, 29, 269–274. [Google Scholar] [CrossRef]
- Choi, B.K.; Yoon, H. Positioning stability improvement with inter-system biases on multi-GNSS PPP. J. Appl. Geod. 2018, 239–248. [Google Scholar] [CrossRef]
- Chen, G.; Herring, T.A. Effects of atmospheric azimuthal asymmetry on the analysis of space geodetic data. J. Geophys. Res. 1997, 102, 20489–20502. [Google Scholar] [CrossRef]
- Lagler, K.; Schindelegger, M.; Boehm, J.; Krasna, H.; Nilsson, T. GPT2: Empirical slant delay model for radio space geodetic techniques. Geophys. Res. Lett. 2013, 40, 1069–1073. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Chiswell, S.R.; Herring, T.A.; Anthes, R.A.; Rocken, C.; Ware, R.H. GPS meteorology: Mapping zenith wet delay onto precipitable water. J. Appl. Meteorol. 1994, 33, 379–386. [Google Scholar] [CrossRef]
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orientation on GPS carrier phase. Manuscr. Geod. 1993, 18, 91–98. [Google Scholar]
- Maiya, U.N. A Comparative Study of Precipitable Water in the Atmosphere by Radio, Optical and Other Methods. Ph.D. Thesis, Mysore University, Mysuru, India, 1983. [Google Scholar]
- AIRS Science Team/Joao Teixeira. AIRS/Aqua L2 Standard Physical Retrieval (AIRS-only) V006; Goddard Earth Sciences Data and Information Services Center (GES DISC): Greenbelt, MD, USA, 2013. [CrossRef]
- Roman, J.; Knuteson, R.; August, T.; Hultberg, T.; Ackerman, S.; Revercomb, H. A global assessment of NASA AIRS v6 and EUMETSAT IASI v6 precipitable water vapor using ground-based GPS SuomiNet stations. J. Geophys. Res. Atmos. 2016, 121, 8925–8948. [Google Scholar] [CrossRef]
- Mateus, P.; Nico, G.; Catalao, J. Uncertainty Assessment of the Estimated Atmospheric Delay Obtained by a Numerical Weather Model (NMW). IEEE Trans. Geosci. Remote Sens. 2015, 53, 6710–6717. [Google Scholar] [CrossRef]
- Raja, M.K.; Gutman, S.I.; Yoe, J.G.; Mcmillin, L.M.; Zhao, J. The Validation of AIRS Retrievals of Integrated Precipitable Water Vapor Using Measurements from a Network of Ground-Based GPS Receivers over the Contiguous United States. J. Atmos. Ocean. Technol. 2008, 25, 416–428. [Google Scholar] [CrossRef]
- Schober, P.; Boer, C.; Schwarte, L.A. Correlation Coefficients: Appropriate Use and Interpretation. Anesth. Analg. 2018, 126, 1763–1767. [Google Scholar] [CrossRef] [PubMed]
- Braasch, M.S. Multipath Effects in Global Positioning System: Theory and Applications; Parkinson, J.J., Spilker, J.J., Eds.; AIAA: Washington, DC, USA, 1996; Volume 1, pp. 547–568. [Google Scholar]
- Estey, L.; Meertens, C. TEQC: The Multi-Purpose Toolkit for GPS/GLONASS Data. GPS Solut. 1999, 3, 42–49. [Google Scholar] [CrossRef]
- Vázquez, G.E.; Bennett, R.; Spinler, J. Assessment of Pseudorange Multipath at Continuous GPS Stations in Mexico. Positioning 2013, 4, 253–265. [Google Scholar] [CrossRef]
- Pirti, A. Multipath and multipath reduction in the obstructed areas by using enhanced strobe correlator (ESC) technique. Teh. Vjesn. 2015, 22, 509–519. [Google Scholar] [CrossRef]
- Qin, J.; Yang, K.; Koike, T.; Lu, H.; Ma, Y.; Xu, X. Evaluation of AIRS Precipitable Water Vapor against Ground-based GPS Measurements over the Tibetan Plateau and Its Surroundings. J. Meteorol. Soc. Jpn. 2012, 90C, 87–98. [Google Scholar] [CrossRef]
- Tobin, D.C.; Revercomb, H.E.; Knuteson, R.O.; Lesht, B.M.; Strow, L.L.; Hannon, S.E.; Feltz, W.F.; Moy, L.A.; Fetzer, E.J.; Cress, T.S. Atmospheric radiation measurement site atmospheric state best estimates for atmospheric infrared sounder temperature and water vapor retrieval validation. J. Geophys. Res. 2006, 111, D09S14. [Google Scholar] [CrossRef]
- Bedka, S.; Knuteson, R.; Revercomb, H.; Tobin, D.; Turner, D. An assessment of the absolute accuracy of the Atmospheric Infrared Sounder v5 precipitable water vapor product at tropical, midlatitude, and arctic ground-truth sites: September 2002 through August 2008. J. Geophys. Res. Atmos. 2010, 115, D17310. [Google Scholar] [CrossRef]
- Heng, Z.; Jiang, X. An Assessment of the Temperature and Humidity of Atmospheric Infrared Sounder (AIRS) v6 Profiles Using Radiosonde Data in the Lee of the Tibetan Plateau. Atmosphere 2019, 10, 394. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Models/Methods |
|---|---|
| Observations | Un-differenced Ionospheric Free Linear Combination (IFLC) |
| Signal | GPS: L1/L2 |
| Elevation cutoff | 10° |
| Weight for observations | Elevation-dependent angle stochastic model (, is the elevation angle of the satellite |
| Sampling rate | 30 sec |
| Satellite orbit and clock, Earth rotation parameters | IGS final products |
| Satellite PCO/PCV | IGS14.atx |
| Receiver PCO/PCV | IGS14.atx |
| Phase wind-up | Wu et al. [29] |
| Solid earth tide, ocean tide, pole tide | IERS conventions 2010 |
| Receiver clock | Estimated by Gauss-Markov model |
| Ionosphere | Ionospheric 1st-order delay is eliminated by IFLC |
| Troposphere | Estimated with tropospheric , , and |
| Tropospheric mapping function | GMF |
| Ambiguity | Float solutions |
| Site Name | Receiver Type | Antenna Type | Latitude (Deg.) | Longitude (Deg.) |
|---|---|---|---|---|
| BRDO | Trimble NetR9 | TRM55971.00 | 37.96 N | 124.62 E |
| GANR | JAVAD TRE_G3T | JAVRINGANT_DM | 37.78 N | 128.87 E |
| KWNJ | Trimble NetR9 | TRM59800.80 | 35.17 N | 126.91 E |
| GNSS Stations | Statistics | Comparison | ||
|---|---|---|---|---|
| GNSS–Radiosonde | Distance (km) | GNSS–AIRS | ||
| BRDO | Bias (mm) | 1.27 | 0.01 | −2.64 |
| RMS (mm) | 2.47 | 4.38 | ||
| GANR | Bias (mm) | −0.60 | 2.60 | −5.19 |
| RMS (mm) | 2.73 | 6.24 | ||
| KWNJ | Bias (mm) | −4.13 | 10.60 | −7.25 |
| RMS (mm) | 4.40 | 7.40 |
| Observations (Numbers) | GNSS-PWV (mm) | Radiosonde-PWV (mm) | Difference (mm) |
|---|---|---|---|
| 1 | 42.47 | 45.10 | −2.63 |
| 2 | 34.70 | 35.59 | −0.89 |
| 3 | 38.96 | 46.75 | −7.79 |
| 4 | 55.40 | 57.73 | −2.33 |
| 5 | 57.33 | 59.18 | −1.85 |
| 6 | 42.84 | 43.91 | −1.07 |
| 7 | 70.25 | 65.80 | 4.45 |
| 8 | 58.47 | 60.60 | −2.13 |
| 9 | 59.70 | 62.37 | −2.67 |
| 10 | 61.72 | 61.55 | 0.17 |
| 11 | 54.70 | 61.27 | −6.57 |
| 12 | 68.34 | 62.92 | 5.42 |
| 13 | 62.51 | 55.97 | 6.54 |
| 14 | 58.09 | 65.78 | −7.69 |
| 15 | 47.99 | 53.36 | −5.37 |
| 16 | 38.46 | 49.27 | −10.81 |
| 17 | 49.10 | 45.83 | 3.27 |
| 18 | 50.96 | 47.95 | 3.01 |
| 19 | 52.83 | 45.74 | 7.09 |
| 20 | 47.69 | 45.13 | 2.56 |
| 21 | 44.86 | 49.80 | −4.94 |
| 22 | 50.71 | 58.96 | −8.25 |
| Observations (numbers) | GNSS-PWV (mm) | AIRS-PWV (mm) | Difference (mm) |
|---|---|---|---|
| 1 | 41.27 | 40.43 | 0.84 |
| 2 | 46.25 | 28.88 | 17.37 |
| 3 | 30.07 | 39.59 | −9.52 |
| 4 | 47.34 | 50.34 | −3.00 |
| 5 | 66.34 | 61.71 | 4.63 |
| 6 | 67.56 | 51.10 | 16.46 |
| 7 | 57.93 | 44.16 | 13.77 |
| 8 | 67.87 | 57.87 | 10.00 |
| 9 | 55.43 | 54.00 | 1.43 |
| 10 | 53.10 | 58.05 | −4.95 |
| 11 | 59.93 | 55.33 | 4.60 |
| 12 | 43.96 | 57.58 | −13.62 |
| 13 | 39.37 | 47.87 | −8.50 |
| 14 | 51.77 | 50.35 | 1.42 |
| 15 | 38.58 | 45.40 | −6.82 |
| 16 | 50.81 | 48.50 | 2.31 |
| 17 | 45.14 | 50.82 | −5.68 |
| 18 | 40.15 | 44.40 | −4.25 |
| 19 | 52.74 | 47.20 | 5.54 |
| 20 | 38.83 | 40.53 | −1.70 |
| 21 | 40.49 | 45.25 | −4.76 |
| 22 | 47.60 | 53.55 | −5.95 |
| 23 | 46.03 | 57.65 | −11.62 |
| 24 | 69.75 | 54.20 | 15.55 |
| 25 | 42.39 | 56.43 | −14.04 |
| 26 | 54.09 | 50.66 | 3.43 |
| 27 | 48.90 | 60.04 | −11.14 |
| 28 | 47.74 | 44.36 | 3.38 |
| 29 | 33.62 | 22.81 | 10.81 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sohn, D.-H.; Choi, B.-K.; Park, Y.; Kim, Y.C.; Ku, B. Precipitable Water Vapor Retrieval from Shipborne GNSS Observations on the Korean Research Vessel ISABU. Sensors 2020, 20, 4261. https://doi.org/10.3390/s20154261
Sohn D-H, Choi B-K, Park Y, Kim YC, Ku B. Precipitable Water Vapor Retrieval from Shipborne GNSS Observations on the Korean Research Vessel ISABU. Sensors. 2020; 20(15):4261. https://doi.org/10.3390/s20154261
Chicago/Turabian StyleSohn, Dong-Hyo, Byung-Kyu Choi, Yosup Park, Yoon Chil Kim, and Bonhwa Ku. 2020. "Precipitable Water Vapor Retrieval from Shipborne GNSS Observations on the Korean Research Vessel ISABU" Sensors 20, no. 15: 4261. https://doi.org/10.3390/s20154261
APA StyleSohn, D.-H., Choi, B.-K., Park, Y., Kim, Y. C., & Ku, B. (2020). Precipitable Water Vapor Retrieval from Shipborne GNSS Observations on the Korean Research Vessel ISABU. Sensors, 20(15), 4261. https://doi.org/10.3390/s20154261