Development of a Hybrid Path Planning Algorithm and a Bio-Inspired Control for an Omni-Wheel Mobile Robot



Abstract
1. Introduction
2. Problem Description
2.1. Problem Description
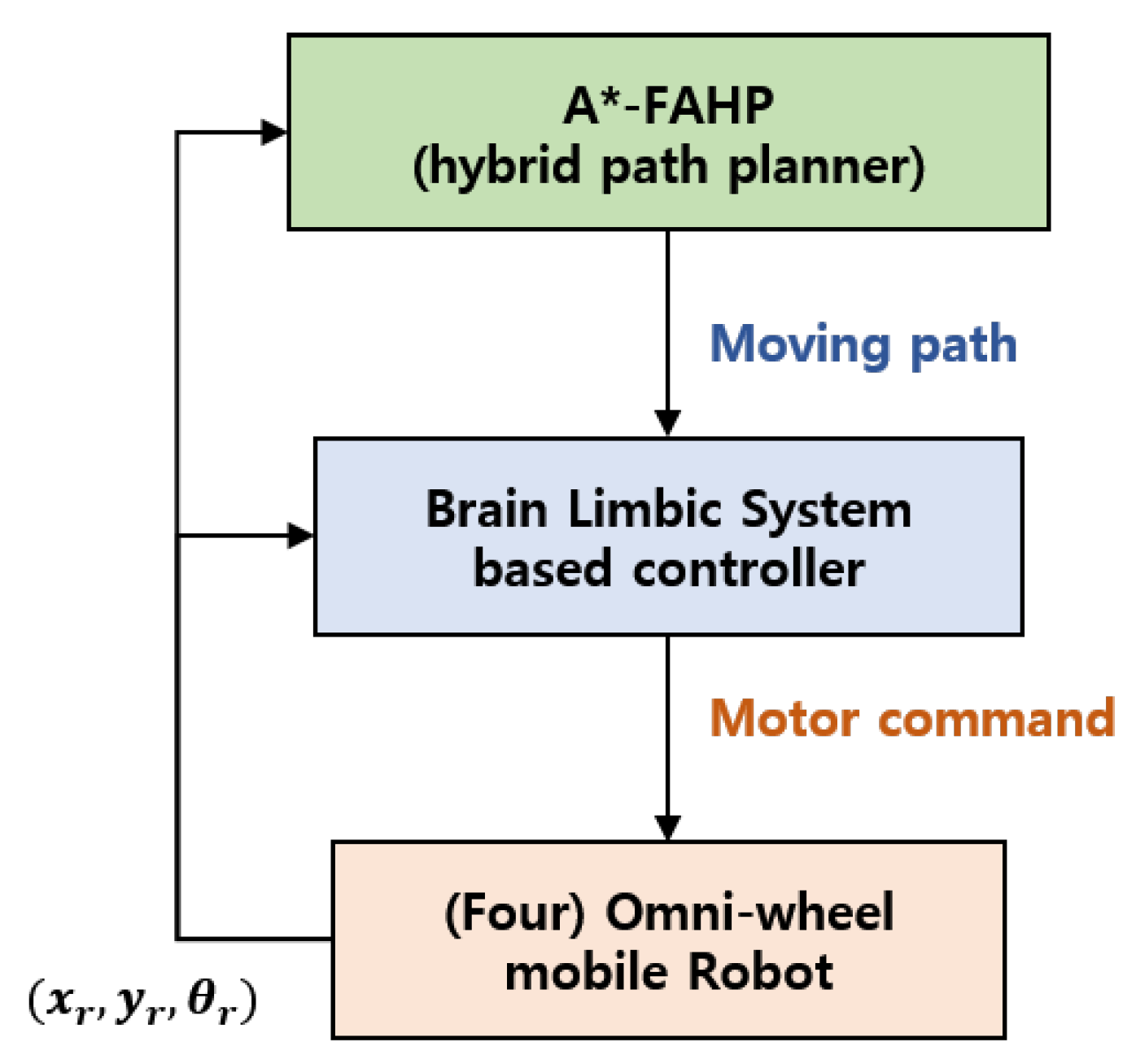
2.2. The Design of an OWMR Motion Controller
2.3. A Hybrid Path Planning Algorithm
3. A Bio-Inspired Controller Design for an Omni-Wheel Mobile Robot
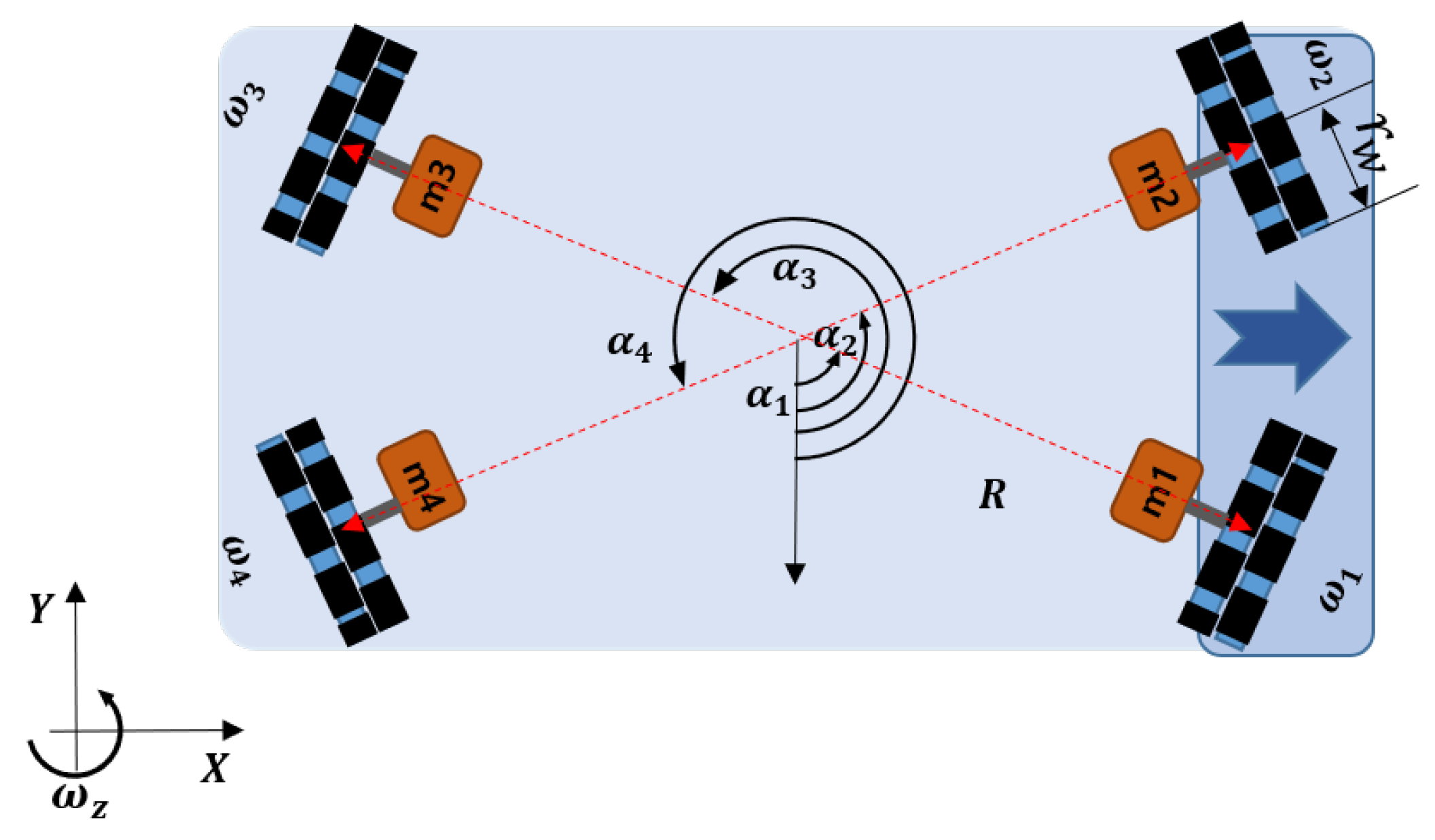
3.1. Kinematics of OWMR
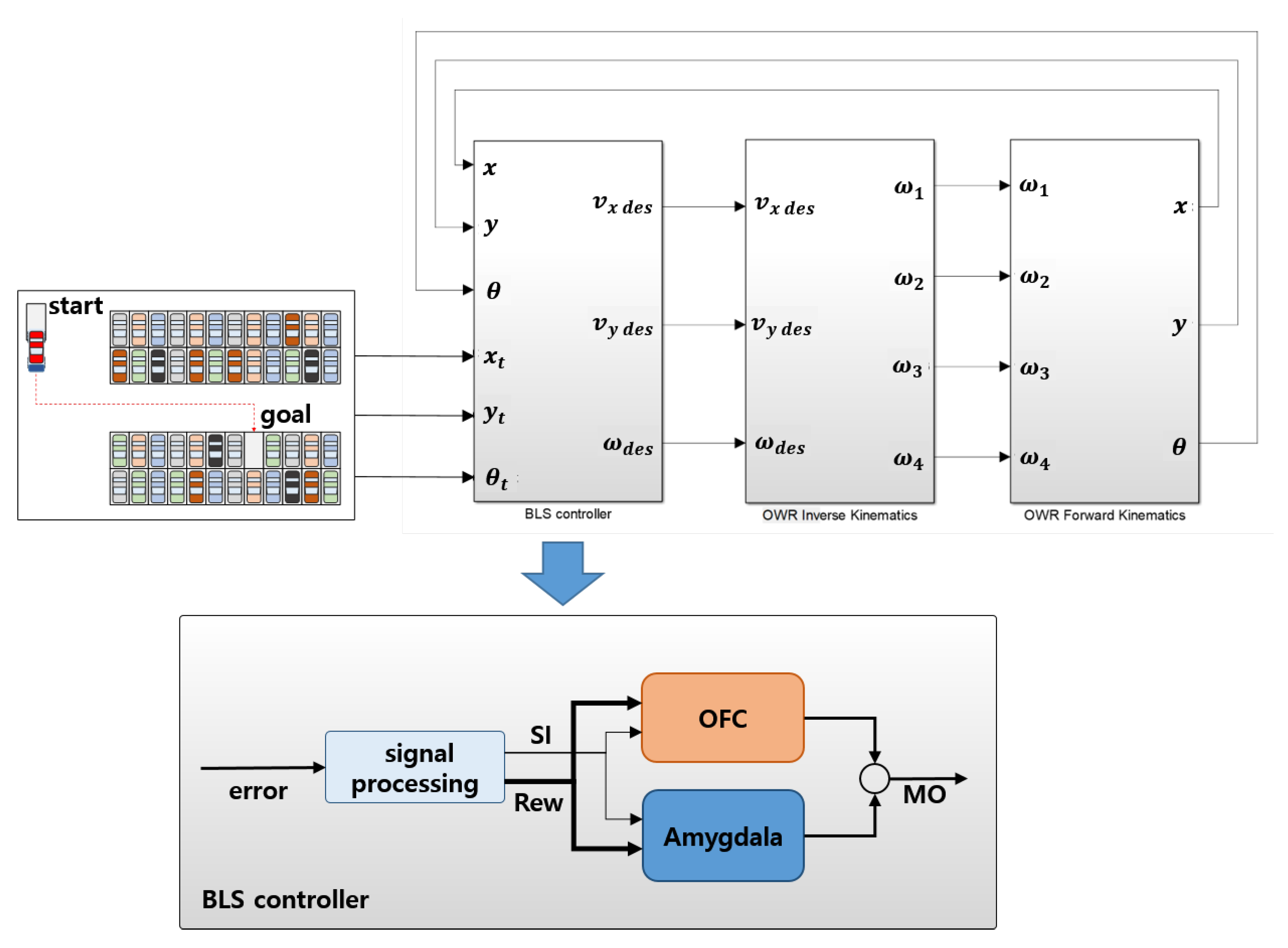
3.2. BLS-Based OWMR Motion Controller Design
4. The A* and Fuzzy Analytic Hierarchy Process-Based Hybrid Path Planning Algorithm
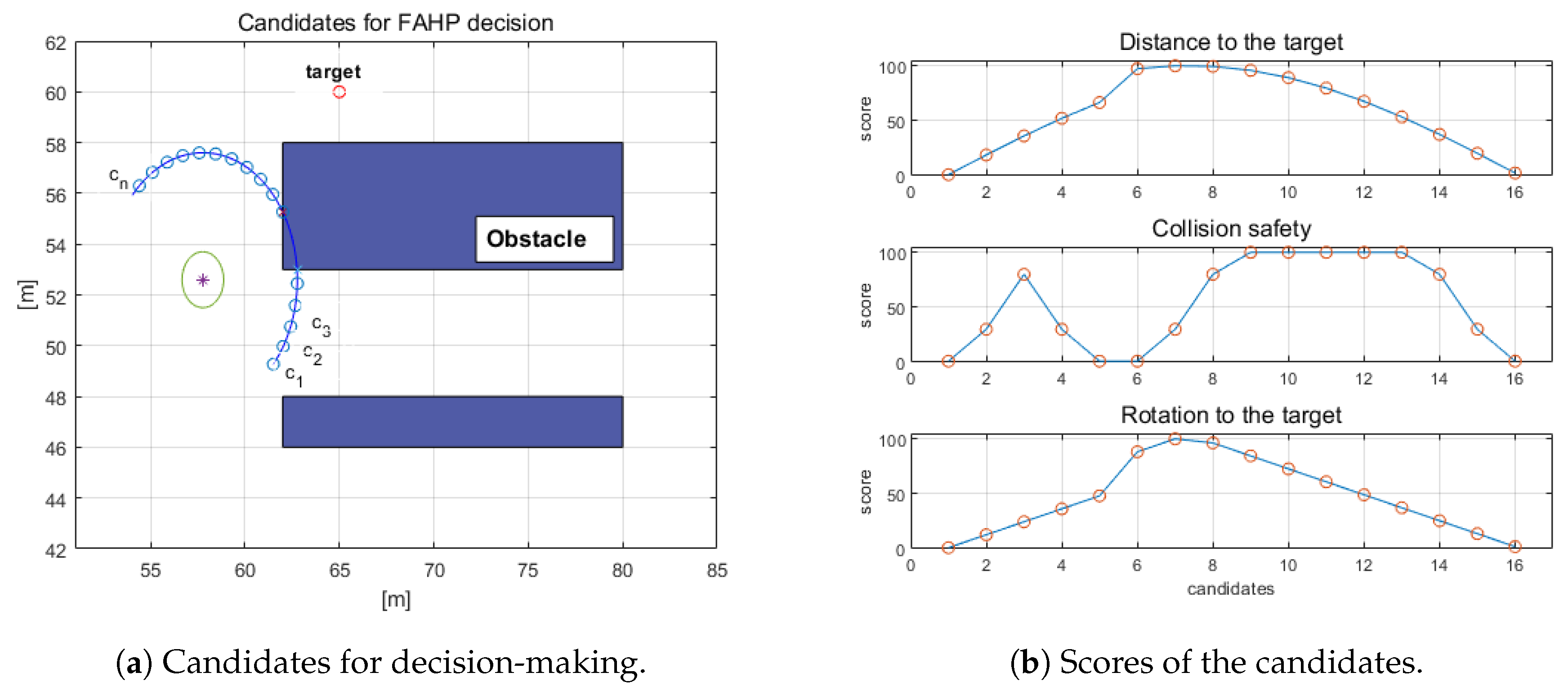
4.1. FAHP Based Path Planning
- Step 1: defining relative importance among objectives.
- Step 2: Consistency check of the relative important matrix.
- Step 3: Fuzzification of the relative important matrix.
- Step 4: Calculation of fuzzy synthetic extent.
- Step 5: Weight vector of FRM calculation.
- Step 6: Evaluation of candidates with respect to the objectives.
- Step 7: Deciding on a solution.
4.2. A* Based Path Planning
| Algorithm 1 A* algorithm pseudo code. |
 |
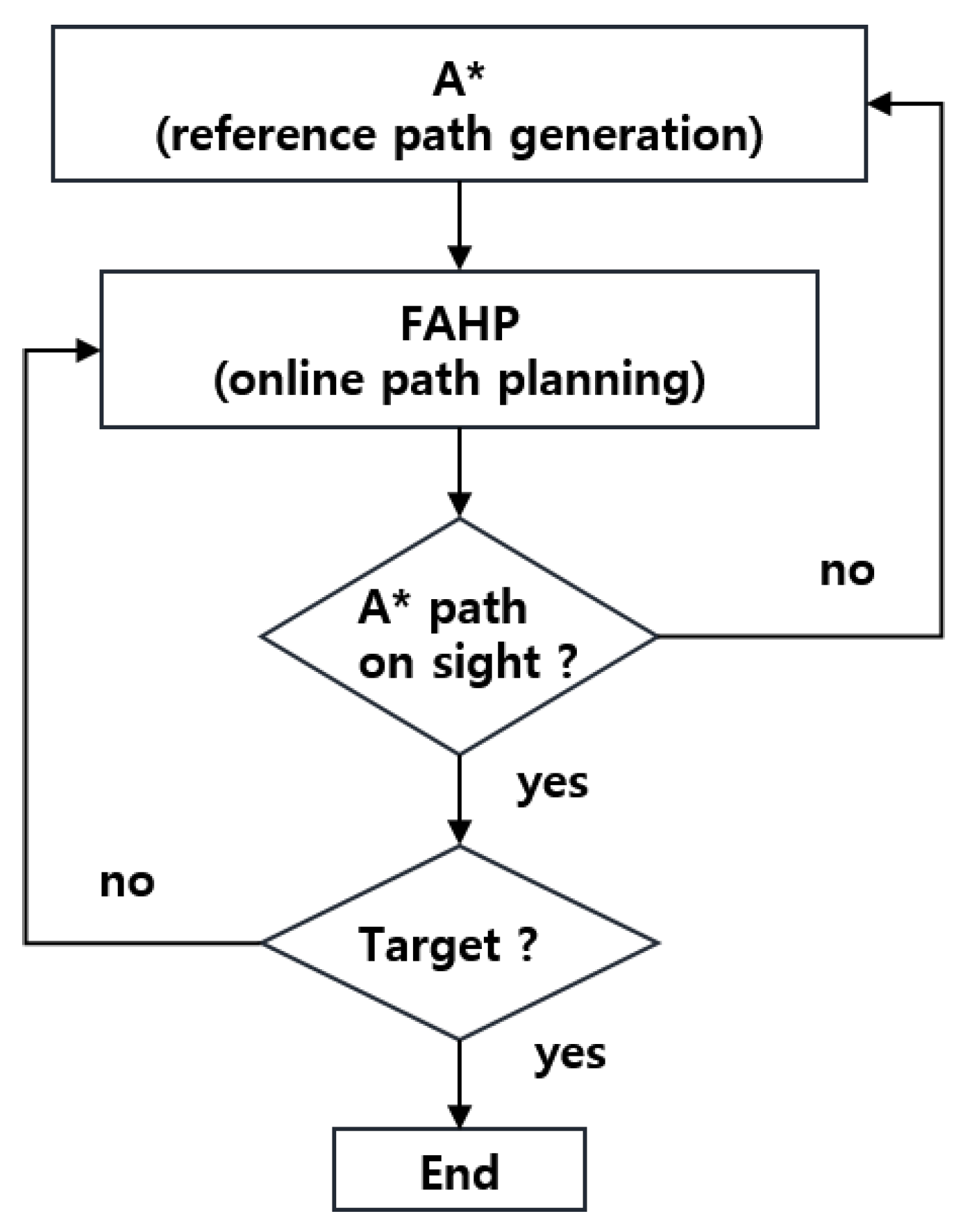
4.3. A* and FAHP Hybrid Path Planning
5. Simulations and Results
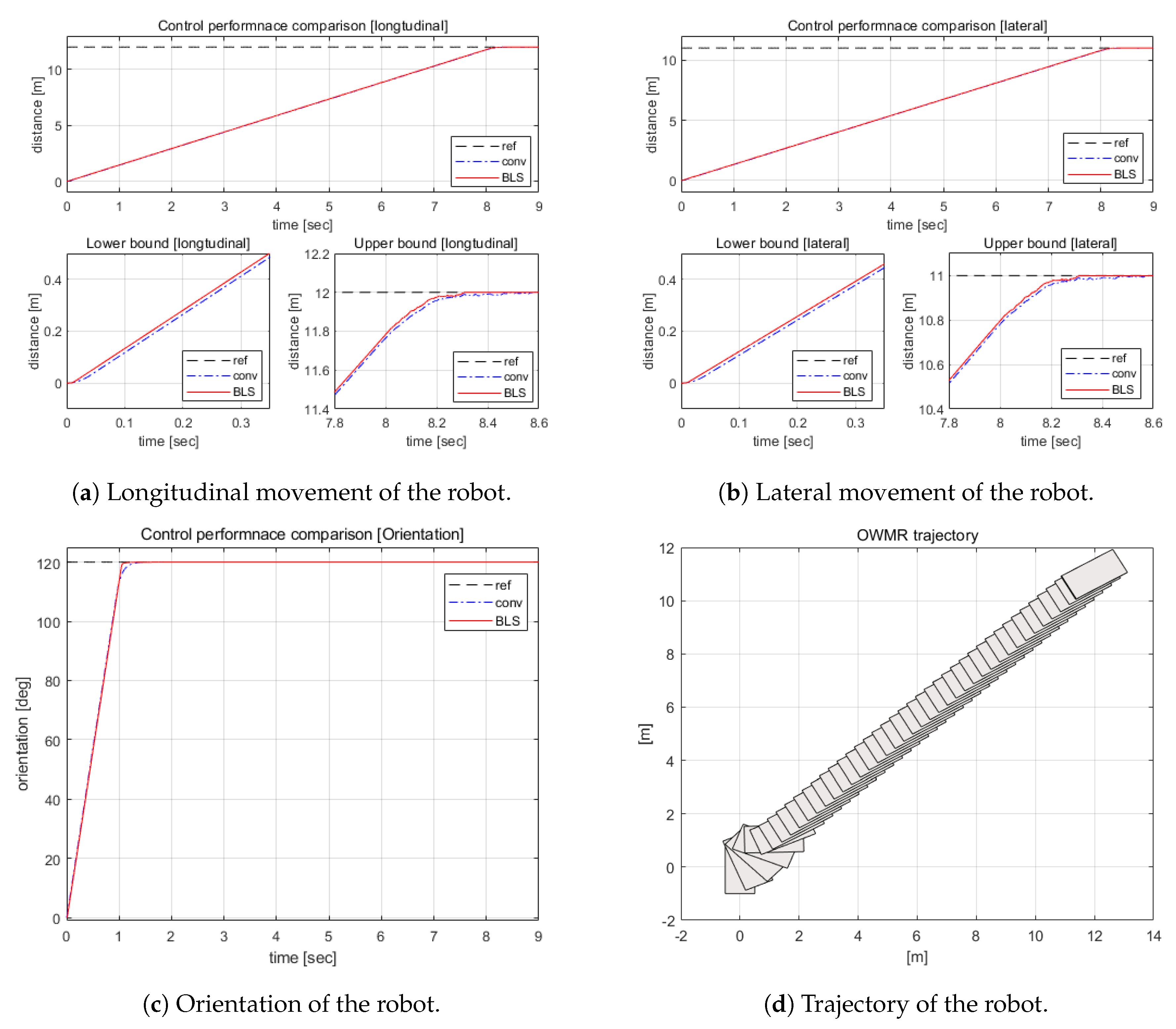
5.1. Performance of BLS-Based Motion Controller
5.1.1. Point-to-Point Movement
5.1.2. Circular Path Tracking
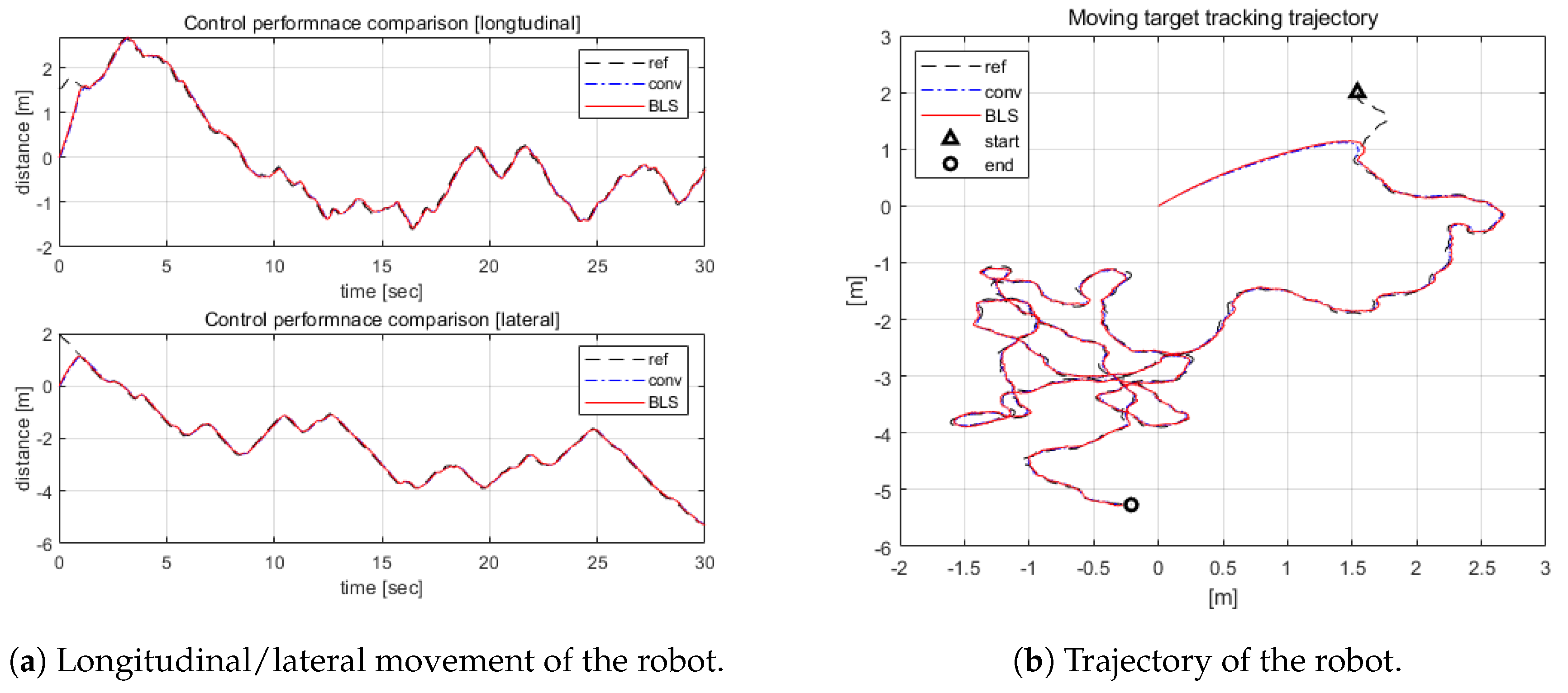
5.1.3. Randomly Moving Target Tracking
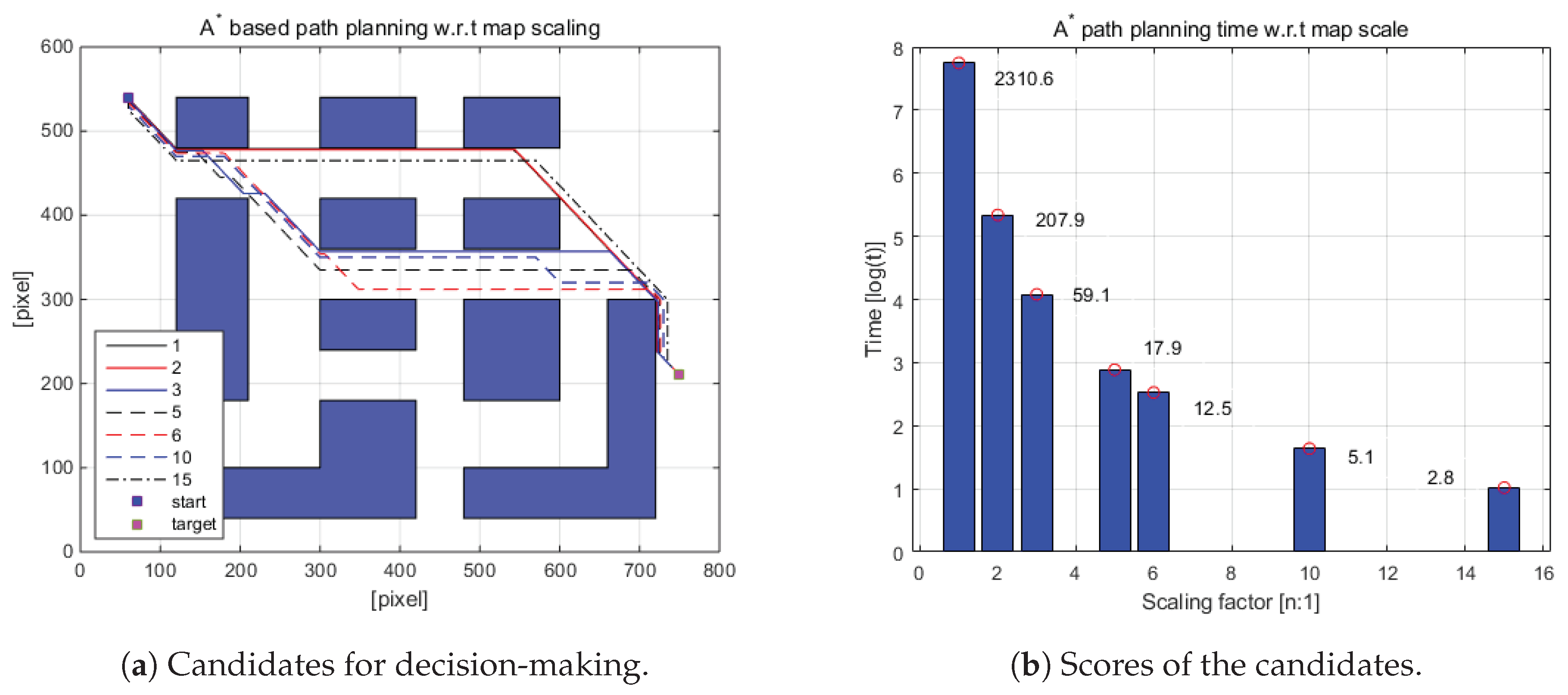
5.2. Performance of the Hybrid Path Planning Algorithm
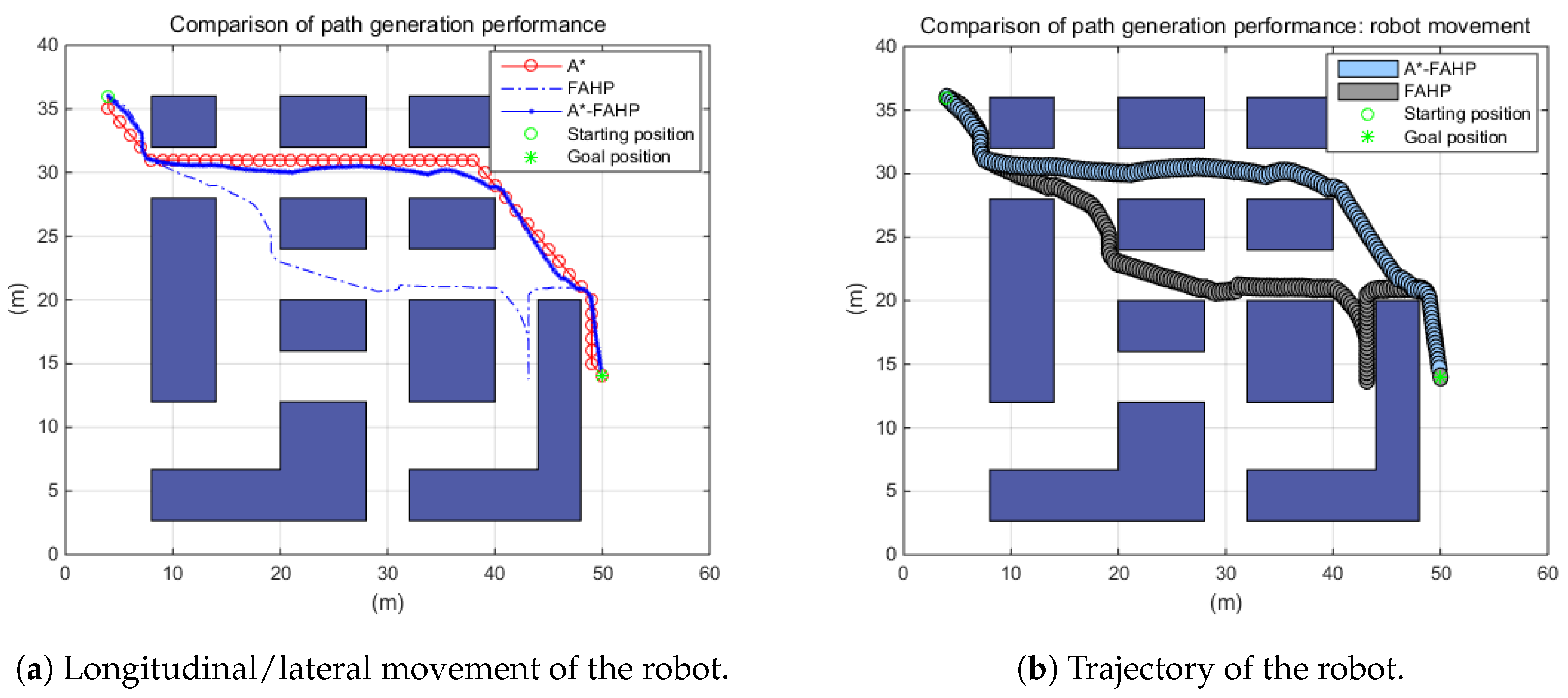
5.2.1. The Hybrid Path Planning Algorithm under the Stationary Working Environment
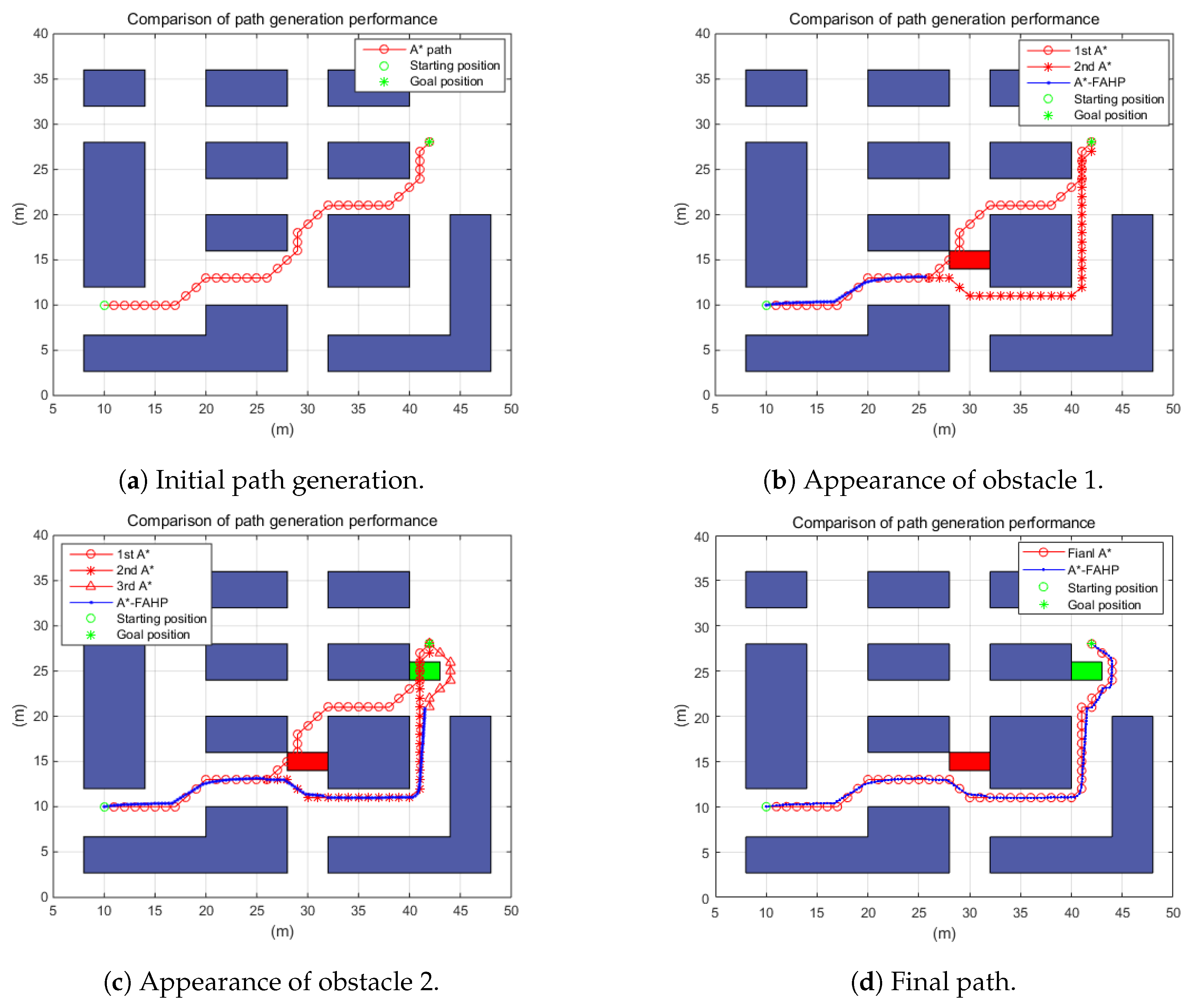
5.2.2. The Hybrid Path Planning Algorithm under the Dynamic Working Environment
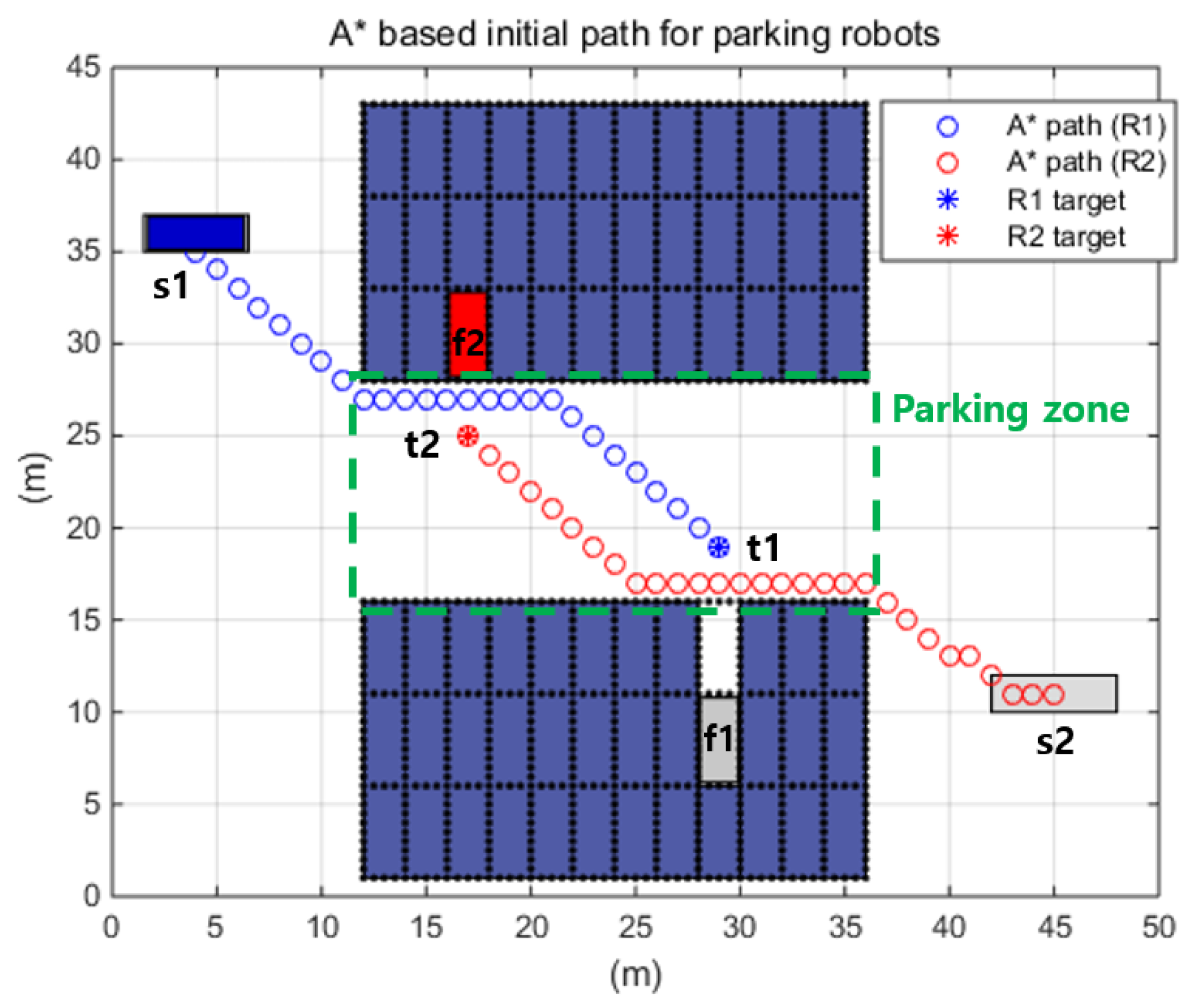
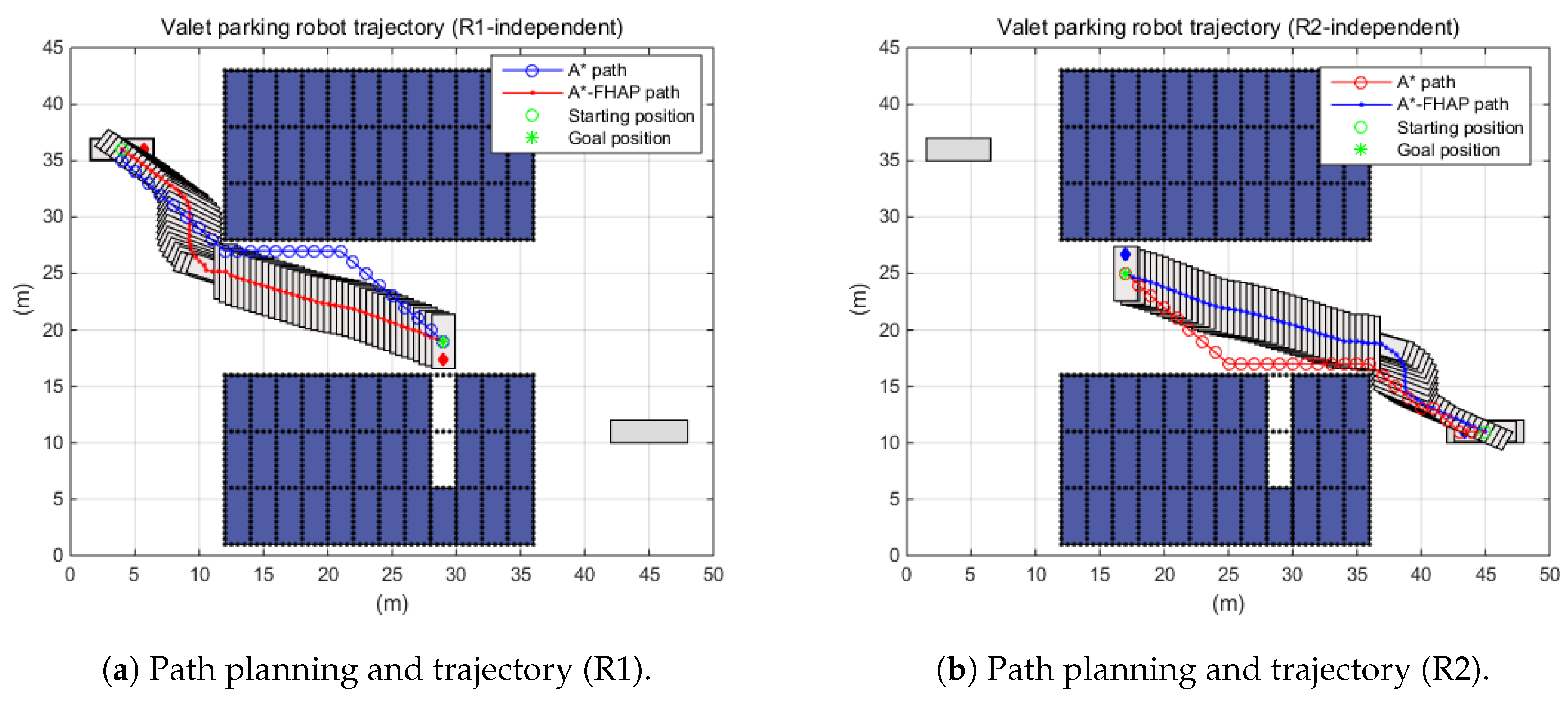
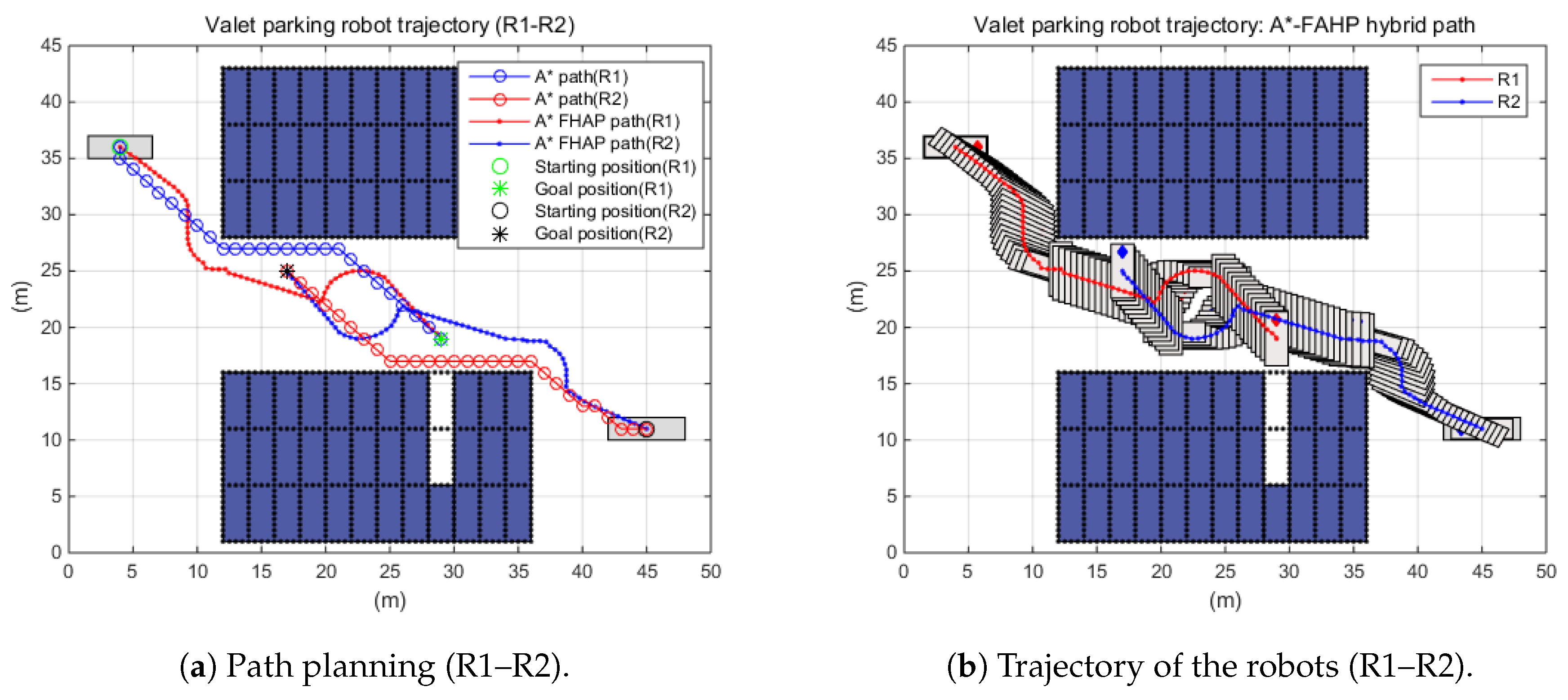
5.2.3. The Hybrid Path Planning Algorithm under the Autonomous Valet Parking Scenario
- The autonomous parking management system assigns parking robots (which robot doing what) and notifies the starting/goal position to the assigned robot. Additionally, the path generation is conducted by individual robots via A*–FAHP.
- The robots communicate each other, sharing the movement information for cooperative decision-making to avoid collision between robots and increase efficiency (more details are given in [36].
5.2.4. Analysis of Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Rojas, R.; Förster, A.G. Holonomic control of a robot with an omnidirectional drive. KI-Künstliche Intell. 2006, 20, 12–17. [Google Scholar]
- Li, X.; Zell, A. Motion control of an omnidirectional mobile robot. In Informatics in Control, Automation and Robotics; Springer: Berlin/Heidelberg, Germany, 2009; pp. 181–193. [Google Scholar]
- Liu, Y.; Zhu, J.J.; Williams II, R.L.; Wu, J. Omni-directional mobile robot controller based on trajectory linearization. Robot. Auton. Syst. 2008, 56, 461–479. [Google Scholar] [CrossRef]
- Song, J.B.; Byun, K.S. Design and Control of a Four-Wheeled Omnidirectional Mobile Robot with Steerable Omnidirectional Wheels. J. Robot. Syst. 2004, 21, 193–208. [Google Scholar] [CrossRef]
- Hashemi, E.; Jadidi, M.G.; Babarsad, O.B. Trajectory planning optimization with dynamic modeling of four wheeled omni-directional mobile robots. In Proceedings of the 2009 IEEE International Symposium on Computational Intelligence in Robotics and Automation-(CIRA), Daejeon, Korea, 15–18 December 2009; pp. 272–277. [Google Scholar]
- Wang, C.; Liu, X.; Yang, X.; Hu, F.; Jiang, A.; Yang, C. Trajectory tracking of an omni-directional wheeled mobile robot using a model predictive control strategy. Appl. Sci. 2018, 8, 231. [Google Scholar] [CrossRef]
- Luo, J.; Lin, Z.; Li, Y.; Yang, C. A teleoperation framework for mobile robots based on shared control. IEEE Robot. Autom. Lett. 2019, 5, 377–384. [Google Scholar] [CrossRef]
- Castillo, O.; Trujillo, L.; Melin, P. Multiple objective genetic algorithms for path-planning optimization in autonomous mobile robots. Soft Comput. 2007, 11, 269–279. [Google Scholar] [CrossRef]
- Masehian, E.; Sedighizadeh, D. A multi-objective PSO-based algorithm for robot path planning. In Proceedings of the 2010 IEEE International Conference on Industrial Technology, Vina del Mar, Chile, 14–17 March 2010; pp. 465–470. [Google Scholar]
- Ahmed, F.; Deb, K. Multi-objective optimal path planning using elitist non-dominated sorting genetic algorithms. Soft Comput. 2013, 17, 1283–1299. [Google Scholar] [CrossRef]
- Ma, Y.; Hu, M.; Yan, X. Multi-objective path planning for unmanned surface vehicle with currents effects. ISA Trans. 2018, 75, 137–156. [Google Scholar] [CrossRef]
- Yunqiang, H.; Wende, K.; Lin, C.; Xiaokun, L. Research on multi-objective path planning of a robot based on artificial potential field method. Int. J. Wirel. Mob. Comput. 2018, 15, 335–341. [Google Scholar] [CrossRef]
- Kim, C.; Langari, R. Analytical Hierarchy Process and Brain Limbic System combined strategy for mobile robot navigation. In Proceedings of the 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, QC, Canada, 6–9 July 2010; pp. 967–972. [Google Scholar]
- Kouzehgar, M.; Rajesh Elara, M.; Ann Philip, M.; Arunmozhi, M.; Prabakaran, V. Multi-Criteria Decision Making for Efficient Tiling Path Planning in a Tetris-Inspired Self-Reconfigurable Cleaning Robot. Appl. Sci. 2019, 9, 63. [Google Scholar] [CrossRef]
- Zagradjanin, N.; Pamucar, D.; Jovanovic, K. Cloud-Based Multi-Robot Path Planning in Complex and Crowded Environment with Multi-Criteria Decision Making Using Full Consistency Method. Symmetry 2019, 11, 1241. [Google Scholar] [CrossRef]
- Kalmár-Nagy, T.; D’Andrea, R.; Ganguly, P. Near-optimal dynamic trajectory generation and control of an omnidirectional vehicle. Robot. Auton. Syst. 2004, 46, 47–64. [Google Scholar] [CrossRef]
- Choi, J.W.; Curry, R.E.; Elkaim, G.H. Obstacle avoiding real-time trajectory generation and control of omnidirectional vehicles. In Proceedings of the 2009 American Control Conference, St. Louis, MI, USA, 10–12 June 2009; pp. 5510–5515. [Google Scholar]
- Kong, H.; Yang, C.; Li, G.; Dai, S.L. A sEMG-Based Shared Control System With No-Target Obstacle Avoidance for Omnidirectional Mobile Robots. IEEE Access 2020, 8, 26030–26040. [Google Scholar] [CrossRef]
- Morén, J.; Balkenius, C. A computational model of emotional learning in the amygdala. Anim. Animat. 2000, 6, 115–124. [Google Scholar]
- Lucas, C.; Shahmirzadi, D.; Sheikholeslami, N. Introducing BELBIC: Brain emotional learning based intelligent controller. Intell. Autom. Soft Comput. 2004, 10, 11–21. [Google Scholar] [CrossRef]
- Lucas, C.; Milasi, R.M.; Araabi, B.N. Intelligent modeling and control of washing machine using locally linear neuro-fuzzy (llnf) modeling and modified brain emotional learning based intelligent controller (BELBIC). Asian J. Control. 2006, 8, 393–400. [Google Scholar] [CrossRef]
- Rouhani, H.; Jalili, M.; Araabi, B.N.; Eppler, W.; Lucas, C. Brain emotional learning based intelligent controller applied to neurofuzzy model of micro-heat exchanger. Expert Syst. Appl. 2007, 32, 911–918. [Google Scholar] [CrossRef]
- Sharbafi, M.A.; Lucas, C.; Daneshvar, R. Motion control of omni-directional three-wheel robots by brain-emotional-learning-based intelligent controller. IEEE Trans. Syst. Man, Cybern. Part C Appl. Rev. 2010, 40, 630–638. [Google Scholar] [CrossRef]
- Dehkordi, B.M.; Kiyoumarsi, A.; Hamedani, P.; Lucas, C. A comparative study of various intelligent based controllers for speed control of IPMSM drives in the field-weakening region. Expert Syst. Appl. 2011, 38, 12643–12653. [Google Scholar] [CrossRef]
- Kim, C.; Langari, R. Brain limbic system-based intelligent controller application to lane change manoeuvre. Veh. Syst. Dyn. 2011, 49, 1873–1894. [Google Scholar] [CrossRef]
- Kim, C.; Langari, R. Adaptive analytic hierarchy process-based decision making to enhance vehicle autonomy. IEEE Trans. Veh. Technol. 2012, 61, 3321–3332. [Google Scholar] [CrossRef]
- Jokar, A.; Zomorodian, R.; Ghofrani, M.B.; Khodaparast, P. Active control of surge in centrifugal compressors using a brain emotional learning-based intelligent controller. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 230, 2828–2839. [Google Scholar] [CrossRef]
- Jafari, M.; Xu, H. A biologically-inspired distributed fault tolerant flocking control for multi-agent system in presence of uncertain dynamics and unknown disturbance. Eng. Appl. Artif. Intell. 2019, 79, 1–12. [Google Scholar] [CrossRef]
- Satty, T. The Analytic Hierarchy Process; McGraw-Hill: New York, NY, USA, 1980. [Google Scholar]
- Atthirawong, W.; MacCarthy, B. An application of the analytical hierarchy process to international location decision-making. In Proceedings of the 7th Annual Cambridge International Manufacturing Symposium: Restructuring Global Manufacturing, Cambridge, UK, 12–13 September 2002; pp. 1–18. [Google Scholar]
- Locatelli, G.; Mancini, M. A framework for the selection of the right nuclear power plant. Int. J. Prod. Res. 2012, 50, 4753–4766. [Google Scholar] [CrossRef]
- Chen, P.Y.; Wu, J.K.; Pai, N.S.; Lai, Y.C. Design and Implementation of an Autonomous Parking Controller Using a Fuzzy controller and AHP for Car-Like Mobile Robot. Int. J. Comput. Consum. Control 2014, 3, 27–39. [Google Scholar]
- Bagga, P.; Joshi, A.; Hans, R. QoS based Web Service Selection and Multi-Criteria Decision Making Methods. Int. J. Interact. Multimed. Artif. Intell. 2019, 5. [Google Scholar] [CrossRef]
- Stanković, M.; Gladović, P.; Popović, V. Determining the importance of the criteria of traffic accessibility using fuzzy AHP and rough AHP method. Decis. Mak. Appl. Manag. Eng. 2019, 2, 86–104. [Google Scholar] [CrossRef]
- Kim, C.; Won, J.S. A Fuzzy Analytic Hierarchy Process and Cooperative Game Theory Combined Multiple Mobile Robot Navigation Algorithm. Sensors 2020, 20, 2827. [Google Scholar] [CrossRef] [PubMed]
- Popovic, M.; Kuzmanović, M.; Savić, G. A comparative empirical study of Analytic Hierarchy Process and Conjoint analysis: Literature review. Decis. Mak. Appl. Manag. Eng. 2018, 1, 153–163. [Google Scholar] [CrossRef]
- Kim, C.; Kim, Y.; Yi, H. Fuzzy Analytic Hierarchy Process-Based Mobile Robot Path Planning. Electronics 2020, 9, 290. [Google Scholar] [CrossRef]
- Chan, F.T.; Kumar, N. Global supplier development considering risk factors using fuzzy extended AHP-based approach. Omega 2007, 35, 417–431. [Google Scholar] [CrossRef]
- Van Laarhoven, P.J.; Pedrycz, W. A fuzzy extension of Saaty’s priority theory. Fuzzy Sets Syst. 1983, 11, 229–241. [Google Scholar] [CrossRef]
- Chang, D.Y. Extent analysis and synthetic decision. Optim. Tech. Appl. 1992, 1, 352–355. [Google Scholar]
- Yoon, S.W.; Park, S.B.; Kim, J.S. Kalman filter sensor fusion for Mecanum wheeled automated guided vehicle localization. J. Sens. 2015, 2015. [Google Scholar] [CrossRef]
- Baede, T. Motion control of an omnidirectional mobile robot. Traineesh. Rep. DCT 2006, 2006. [Google Scholar]
- Phunopas, A.; Inoue, S. Motion Improvement of Four-Wheeled Omnidirectional Mobile Robots for Indoor Terrain. J. Robot. Netw. Artif. Life 2018, 4, 275–282. [Google Scholar] [CrossRef]
- Kim, C.; Langari, R. Application of brain limbic system to adaptive cruise control. Int. J. Veh. Auton. Syst. 2013, 11, 22–41. [Google Scholar] [CrossRef]
- Kim, C.; Langari, R. A mobile robot target tracking via brain limbic system based control. Int. J. Robot. Autom. 2011, 26, 288. [Google Scholar] [CrossRef]
- Shiller, Z. Off-line and on-line trajectory planning. In Motion and Operation Planning of Robotic Systems; Springer: Berlin/Heidelberg, Germany, 2015; pp. 29–62. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Chang, D.Y. Applications of the extent analysis method on fuzzy AHP. Eur. J. Oper. Res. 1996, 95, 649–655. [Google Scholar] [CrossRef]
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- Ranjitkar, H.S.; Karki, S. Comparison of A*, Euclidean and Manhattan Distance Using Influence Map in MS. Pac-Man; Blekinge Institute of Technology: Karlshamn, Sweden, 2016. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Offline | Online | |
|---|---|---|
| Method | entire path is generated before the navigation | partial path is generated during the navigation |
| - repeatable task and static environment | - dynamic environment | |
| Advantages | - optimal path can be guarantee | - react to the environmental change |
| - can work under dynamic environment | ||
| - low computational load | ||
| Disadvantages | - high computational time and load | |
| - perfect map is required | - locally optimal at best |
| Scaling Factor | 1 | 2 | 3 | 5 | 6 | 10 | 15 |
|---|---|---|---|---|---|---|---|
| time consuming (s) | 2310.6 | 207.9 | 59.1 | 17.9 | 12.5 | 5.1 | 2.8 |
| travel distance (pixel) | 863.01 | 864.18 | 863.6 | 867.7 | 868.87 | 873.55 | 873.55 |
| distance increase (%) | 0.00 | 0.14 | 0.07 | 0.54 | 0.68 | 1.22 | 1.22 |
| Time (s) | Travel Distance (m) | |
|---|---|---|
| A* | 2310.6 | 87.94 |
| FAHP | - | 106.36 |
| A*–FAHP hybrid | 2.8 | 87.54 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, C.; Suh, J.; Han, J.-H. Development of a Hybrid Path Planning Algorithm and a Bio-Inspired Control for an Omni-Wheel Mobile Robot. Sensors 2020, 20, 4258. https://doi.org/10.3390/s20154258
Kim C, Suh J, Han J-H. Development of a Hybrid Path Planning Algorithm and a Bio-Inspired Control for an Omni-Wheel Mobile Robot. Sensors. 2020; 20(15):4258. https://doi.org/10.3390/s20154258
Chicago/Turabian StyleKim, Changwon, Junho Suh, and Je-Heon Han. 2020. "Development of a Hybrid Path Planning Algorithm and a Bio-Inspired Control for an Omni-Wheel Mobile Robot" Sensors 20, no. 15: 4258. https://doi.org/10.3390/s20154258
APA StyleKim, C., Suh, J., & Han, J.-H. (2020). Development of a Hybrid Path Planning Algorithm and a Bio-Inspired Control for an Omni-Wheel Mobile Robot. Sensors, 20(15), 4258. https://doi.org/10.3390/s20154258