Optimizing SSVEP-Based BCI System towards Practical High-Speed Spelling

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Protocol
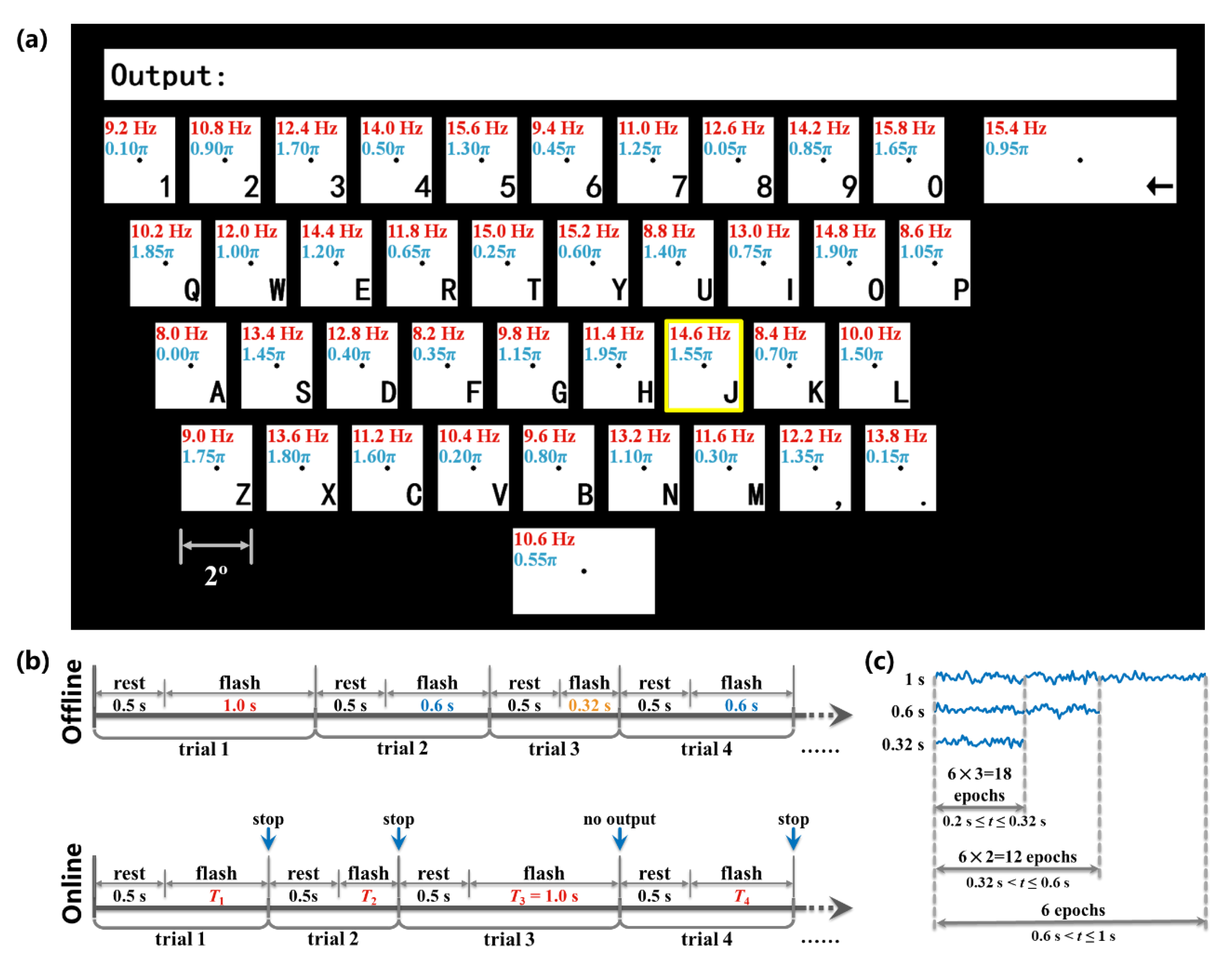
2.1.1. Stimulus Design for Practical Spelling
2.1.2. Experimental Procedure
2.2. EEG Recording and Preprocessing
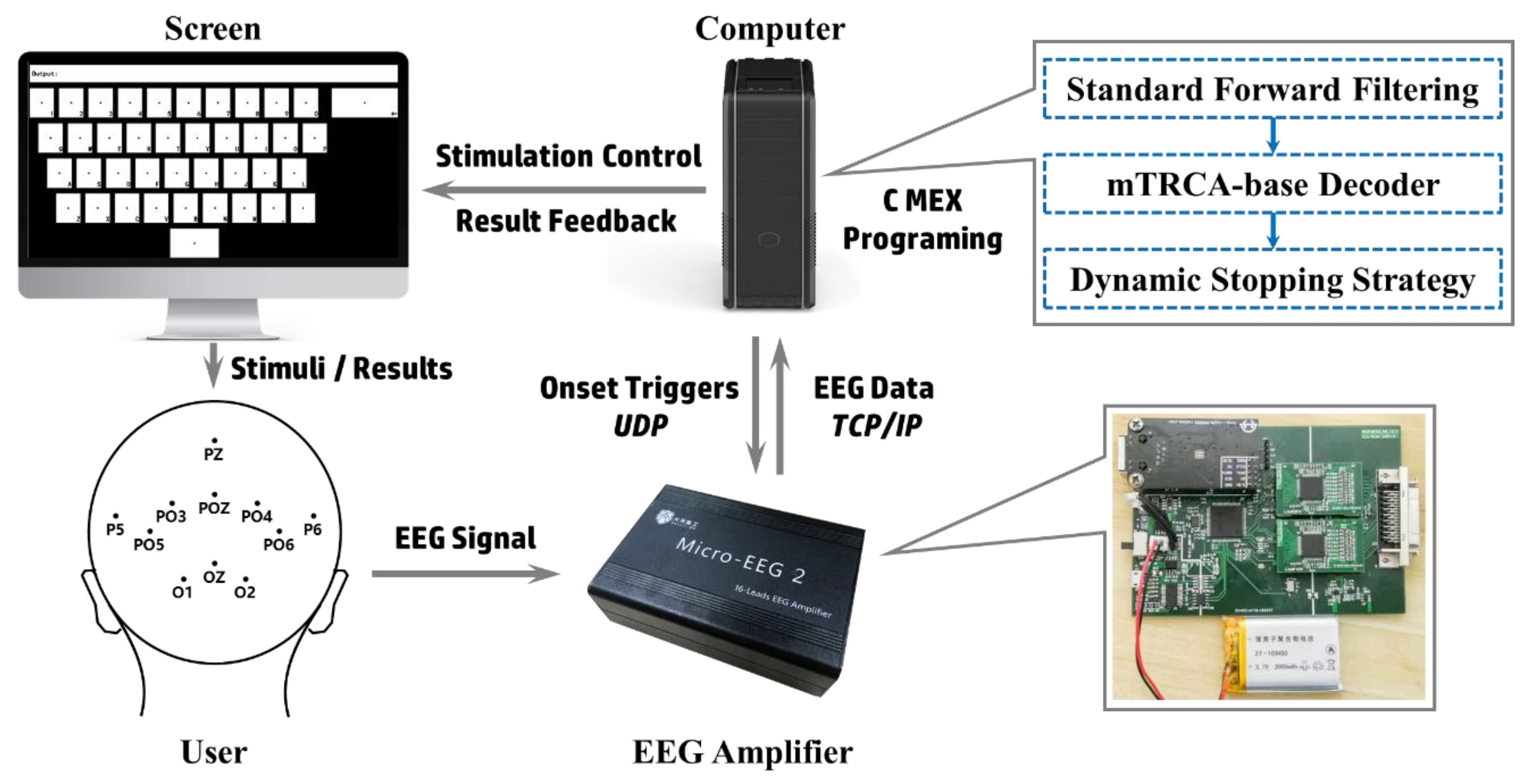
2.2.1. EEG Acquisition System
2.2.2. EEG Preprocessing
2.3. Target Recognition Algorithm
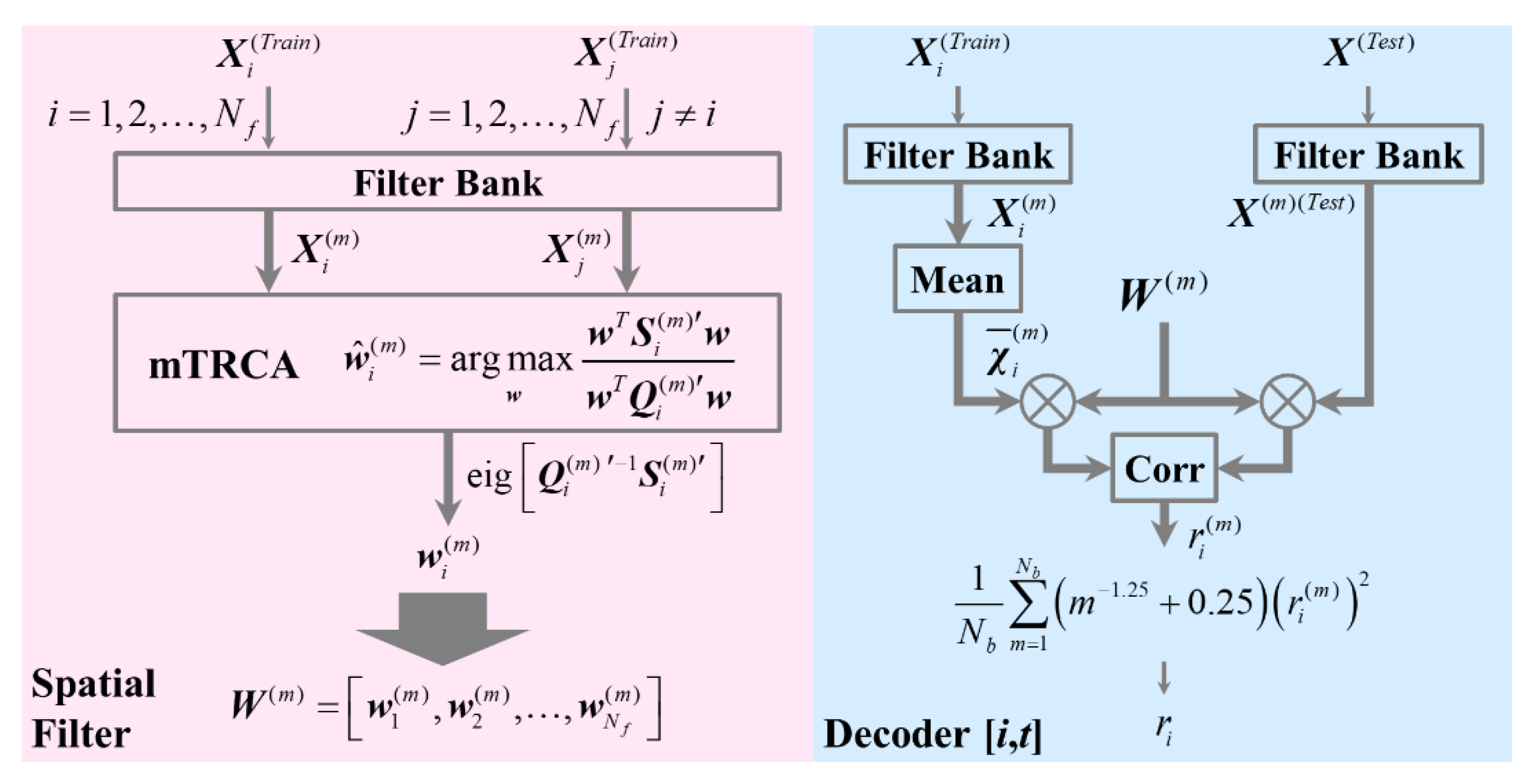
2.3.1. Modified TRCA-Based Spatial Filter
2.3.2. The mTRCA-Based Decoder
2.4. DS Strategy
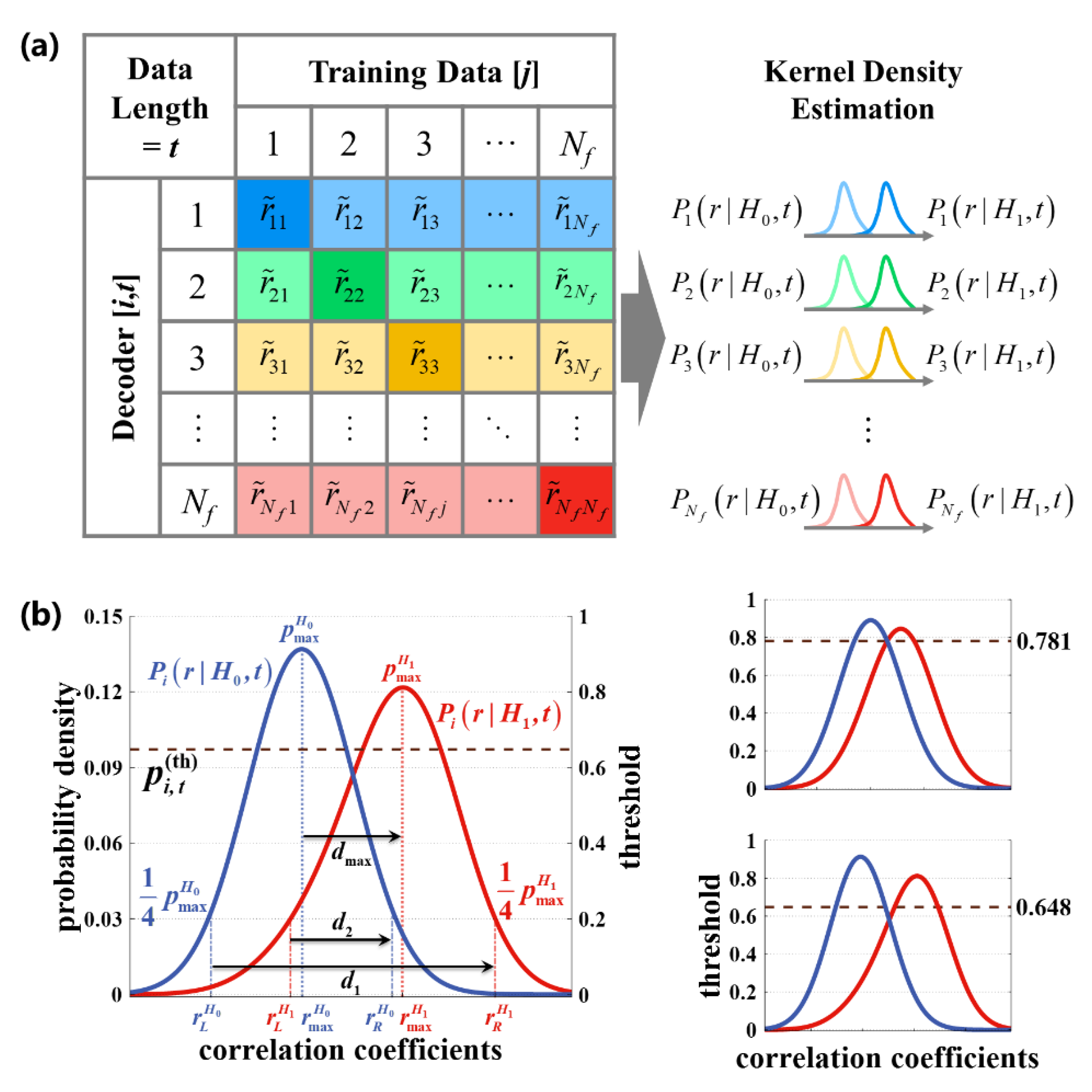
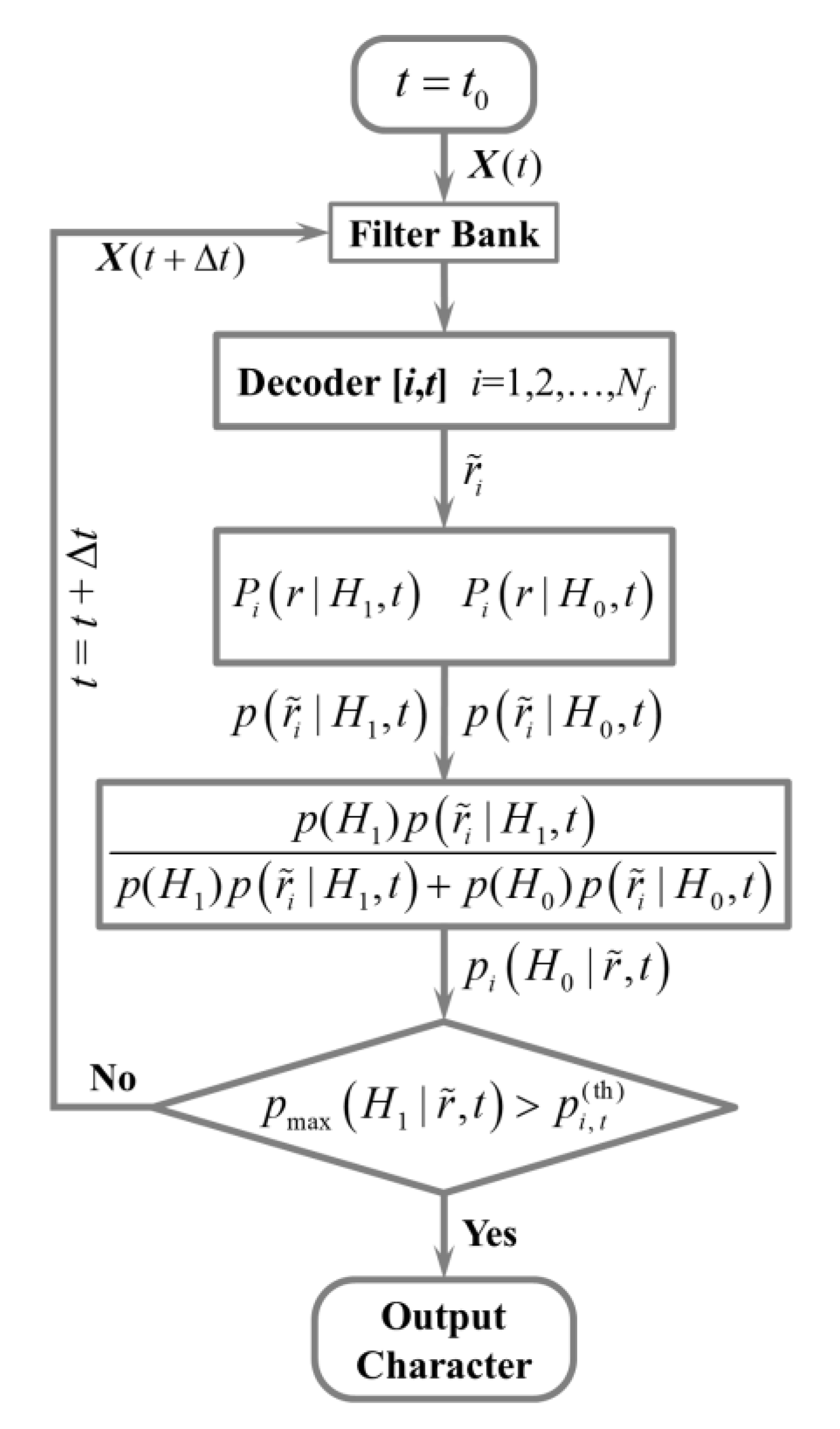
2.4.1. Probabilistic Model for DS Strategy
2.4.2. Procedure of Online Target Recognition with DS
2.5. System Optimization for High-Speed Online Operation
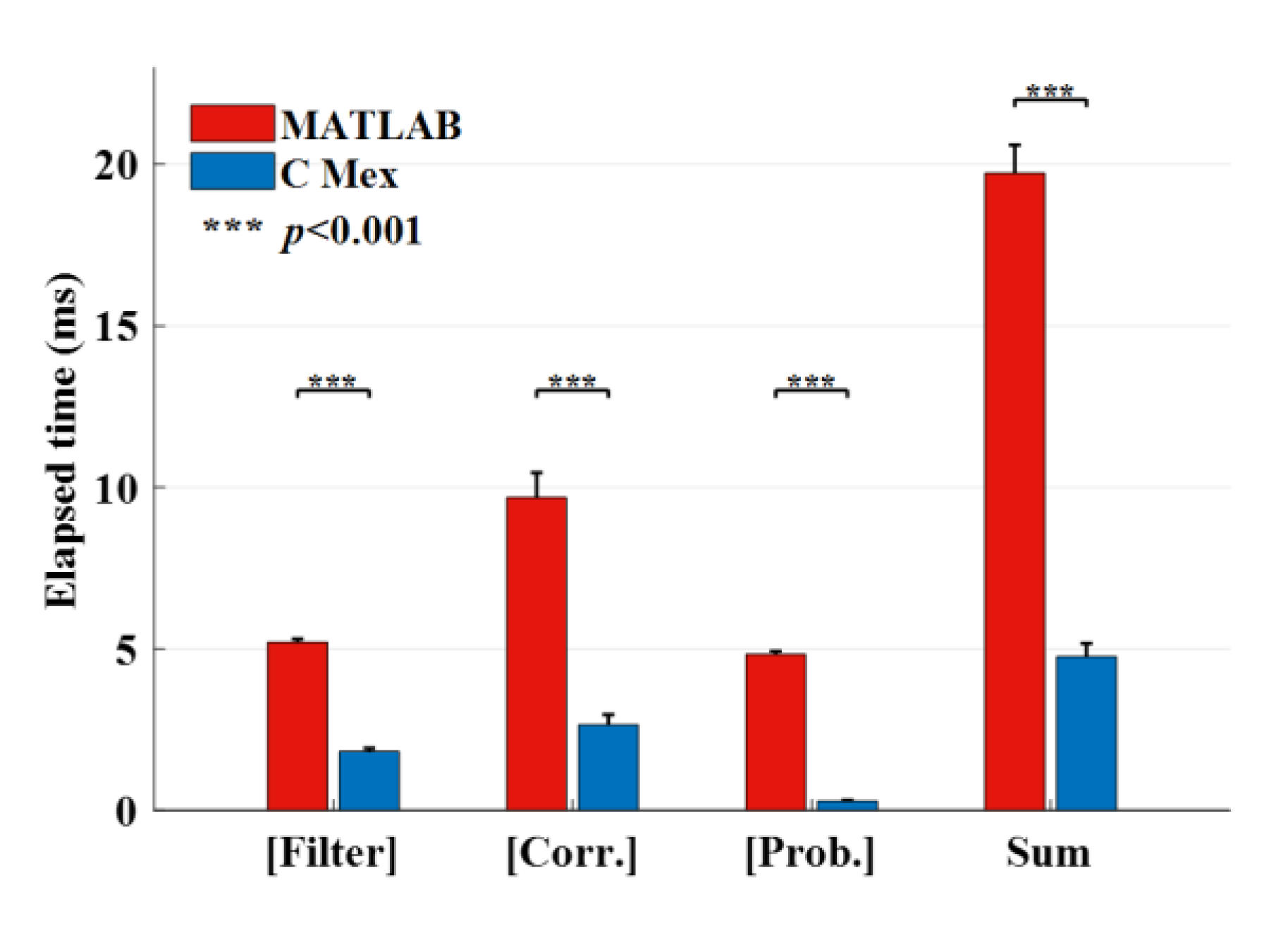
2.5.1. Program Optimization for Real-Time DS
- (Filter): including the 50 Hz notch filtering and the 8 bandpass filtering processes.
- (Corr.): including the spatially filtering and the calculation of 40 (frequencies) × 8 (bands) = 320 coefficients.
- (Prob.): including the normalization of correlation coefficients and the calculation of 40 posterior probabilities.
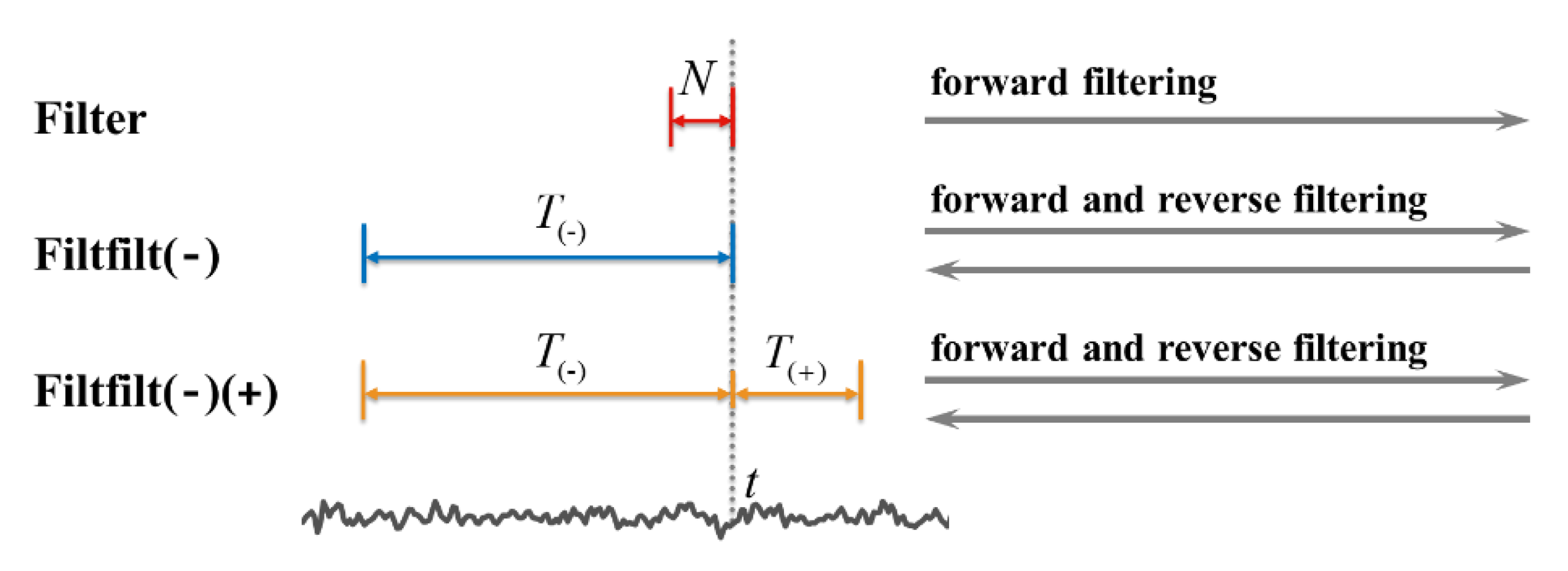
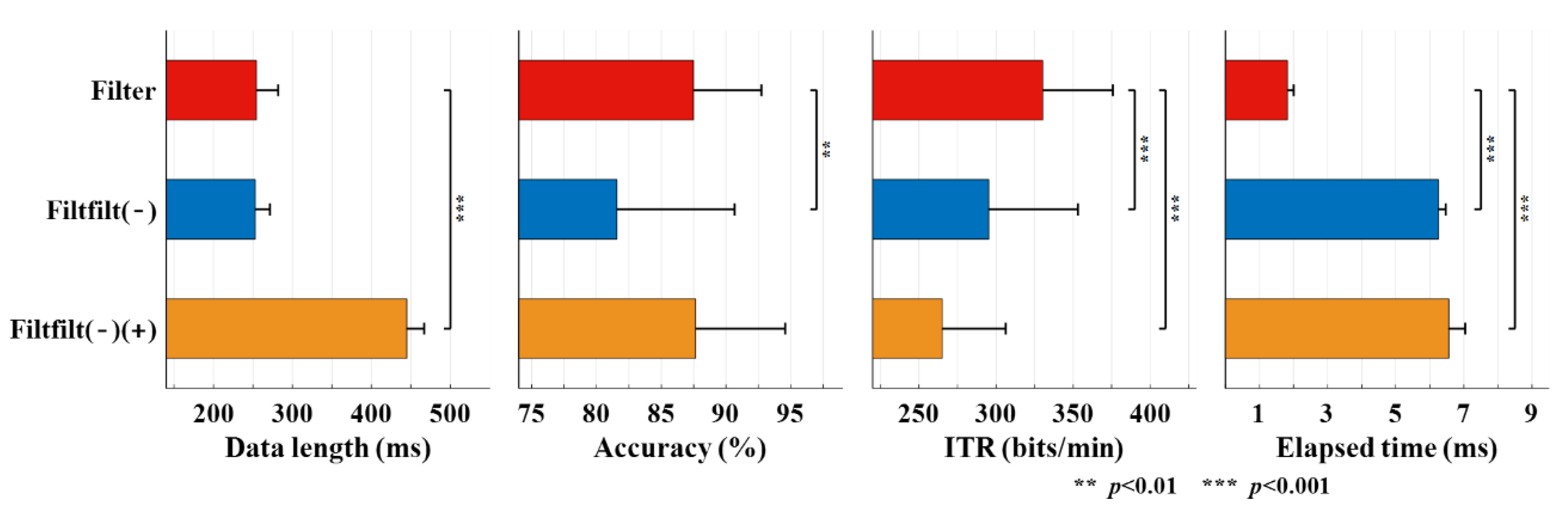
2.5.2. Filtering Strategy Optimization and Comparison
- (Filter): the standard forward filtering method using rational transfer function that could rolling update the filtered signal when a new sample point comes. The data length needed for filtering process prior to time t was equal to the order of filter N.
- (Filtfilt(−)): the forward and reverse filtering method combined with initial condition and signal extending, which was the same as the filtfilt() function. The data of T(−) length prior to time t were used for filtering.
- (Filtfilt(−)(+)): the data of T(−) length prior to time t and the data of T(+) length posterior to time t were used for forward and reverse filtering.
3. Results
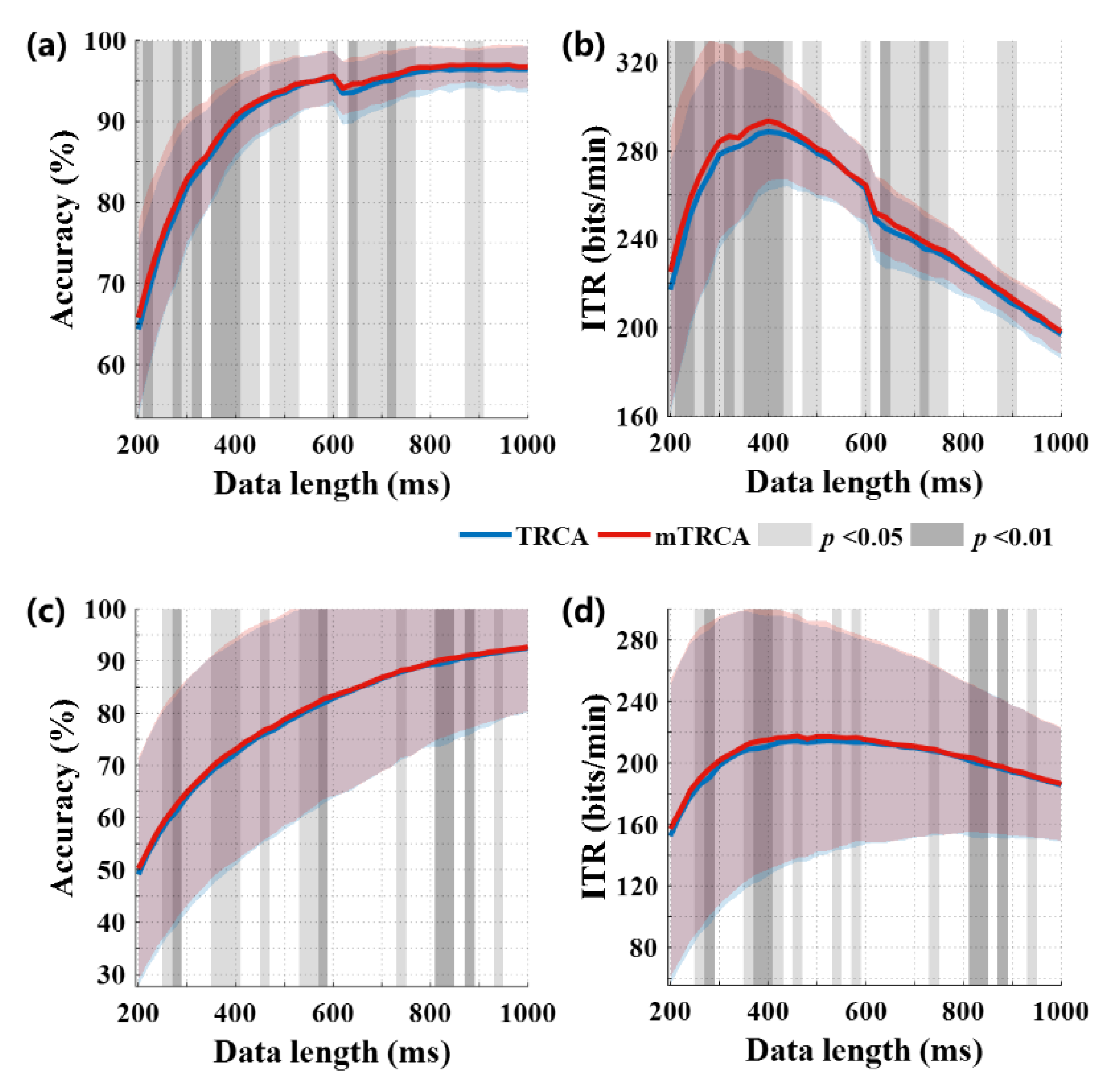
3.1. Comparison of Performance with TRCA and mTRCA
3.2. Online Performance with DS Strategy
3.3. Comparison of Run Time between MATLAB and C Mex
3.4. Comparison of Online Filtering Strategies
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- McFarland, D.J.; Wolpaw, J.R. Brain-Computer Interfaces for Communication and Control. Commun. ACM 2011, 54, 60–66. [Google Scholar] [CrossRef] [PubMed]
- Wolpaw, J.; Wolpaw, E.W. Brain-Computer Interfaces: Principles and Practice; Oxford University Press: Oxford, UK, 2012. [Google Scholar]
- Wang, Z.; Zhou, Y.; Chen, L.; Gu, B.; Yi, W.; Liu, S.; Xu, M.; Qi, H.; He, F.; Ming, D. BCI Monitor Enhances Electroencephalographic and Cerebral Hemodynamic Activations During Motor Training. IEEE Trans. Neural. Syst. Rehabil. Eng. 2019, 27, 780–787. [Google Scholar] [CrossRef]
- Chen, S.; Jiang, J.; Tang, J.; Jiao, X.; Qi, H.; Cao, Y.; Wang, C.; Ming, D. An Experimental Study on Usability of Brain-Computer Interaction Technology in Human Spaceflight; Springer International Publishing: Cham, Switzerland, 2017; pp. 301–312. [Google Scholar]
- de Negueruela, C.; Broschart, M.; Menon, C.; Millán, J.D.R. Brain–computer interfaces for space applications. Pers. Ubiquitous Comput. 2011, 15, 527–537. [Google Scholar] [CrossRef]
- Xiao, X.; Xu, M.; Jin, J.; Wang, Y.; Jung, T.; Ming, D. Discriminative canonical pattern matching for single-trial classification of ERP components. IEEE Trans. Biomed. Eng. 2019, 67, 2266–2275. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Xiao, X.; Wang, Y.; Qi, H.; Jung, T.P.; Ming, D. A Brain-Computer Interface Based on Miniature-Event-Related Potentials Induced by Very Small Lateral Visual Stimuli. IEEE Trans. Biomed. Eng. 2018, 65, 1166–1175. [Google Scholar] [PubMed]
- Ke, Y.; Liu, P.; An, X.; Song, X.; Ming, D. An online SSVEP-BCI system in an optical see-through augmented reality environment. J. Neural. Eng. 2020, 17, 16066. [Google Scholar] [CrossRef] [PubMed]
- Nakanishi, M.; Wang, Y.; Wang, Y.T.; Mitsukura, Y.; Jung, T.P. A high-speed brain speller using steady-state visual evoked potentials. Int. J. Neural Syst. 2014, 24, 1450019. [Google Scholar] [CrossRef]
- Xu, L.; Xu, M.; Ke, Y.; An, X.; Liu, S.; Ming, D. Cross-Dataset Variability Problem in EEG Decoding with Deep Learning. Front. Hum. Neurosci. 2020, 14, 103. [Google Scholar] [CrossRef]
- Wang, K.; Xu, M.; Wang, Y.; Zhang, S.; Chen, L.; Ming, D. Enhance decoding of pre-movement EEG patterns for brain–computer interfaces. J. Neural. Eng. 2020, 17, 16033. [Google Scholar] [CrossRef]
- Vialatte, F.B.; Maurice, M.; Dauwels, J.; Cichocki, A. Steady-state visually evoked potentials: Focus on essential paradigms and future perspectives. Prog. Neurobiol. 2010, 90, 418–438. [Google Scholar] [CrossRef]
- Xu, M.; Jia, Y.; Qi, H.; Hu, Y.; He, F.; Zhao, X.; Zhou, P.; Zhang, L.; Wan, B.; Gao, W. Use of a steady-state baseline to address evoked vs. oscillation models of visual evoked potential origin. Neuroimage 2016, 134, 204–212. [Google Scholar] [CrossRef]
- Kimura, Y.; Tanaka, T.; Higashi, H.; Morikawa, N. SSVEP-Based Brain–Computer Interfaces Using FSK-Modulated Visual Stimuli. IEEE Trans. Biomed. Eng. 2013, 60, 2831–2838. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Chen, Z.; Gao, S.; Gao, X. Brain–computer interface based on intermodulation frequency. J. Neural. Eng. 2013, 10, 66009. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Han, J.; Wang, Y.; Jung, T.; Ming, D. Implementing over 100 command codes for a high-speed hybrid brain-computer interface using concurrent P300 and SSVEP features. IEEE Trans. Biomed. Eng. 2020, 1. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Chen, L.; Zhang, L.; Qi, H.; Ma, L.; Tang, J.; Wan, B.; Ming, D. A visual parallel-BCI speller based on the time–frequency coding strategy. J. Neural. Eng. 2014, 11, 26014. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Wang, Y.; Nakanishi, M.; Jung, T.-P.; Gao, X. Hybrid Frequency and Phase Coding for a High-Speed SSVEP-Based BCI Speller. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 3993–3996. [Google Scholar]
- Wong, C.M.; Wang, B.; Wang, Z.; Lao, K.F.; Rosa, A.; Wan, F. Spatial Filtering in SSVEP-based BCIs: Unified Framework and New Improvements. IEEE Trans. Biomed. Eng. 2020. [Google Scholar] [CrossRef]
- Lin, Z.; Zhang, C.; Wu, W.; Gao, X. Frequency recognition based on canonical correlation analysis for SSVEP-based BCIs. IEEE Trans. Biomed. Eng. 2006, 53, 2610–2614. [Google Scholar] [CrossRef]
- Chen, X.; Wang, Y.; Nakanishi, M.; Gao, X.; Jung, T.-P.; Gao, S. High-speed spelling with a noninvasive brain–computer interface. Proc. Natl. Acad. Sci. USA 2015, 112, E6058–E6067. [Google Scholar] [CrossRef]
- Chen, X.; Wang, Y.; Gao, S.; Jung, T.-P.; Gao, X. Filter bank canonical correlation analysis for implementing a high-speed SSVEP-based brain–computer interface. J. Neural. Eng. 2015, 12, 46008. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, P.; Cheng, K.; Yao, D. Multivariate synchronization index for frequency recognition of SSVEP-based brain–computer interface. J. Neurosci. Methods 2014, 221, 32–40. [Google Scholar] [CrossRef]
- Lin, K.; Gao, S.; Gao, X. Boosting the information transfer rate of an SSVEP-BCI system using maximal-phase-locking value and minimal-distance spatial filter banks. Tsinghua Sci. Technol. 2019, 24, 262–270. [Google Scholar] [CrossRef]
- Nakanishi, M.; Wang, Y.; Chen, X.; Wang, Y.-T.; Gao, X.; Jung, T.-P. Enhancing Detection of SSVEPs for a high-speed brain speller using task-related component analysis. IEEE Trans. Biomed. Eng. 2018, 65, 104–112. [Google Scholar] [CrossRef] [PubMed]
- Schreuder, M.; Höhne, J.; Blankertz, B.; Haufe, S.; Dickhaus, T.; Tangermann, M. Optimizing event-related potential based brain-computer interfaces: A systematic evaluation of dynamic stopping methods. J. Neural. Eng. 2013, 10, 36025. [Google Scholar] [CrossRef] [PubMed]
- Mattout, J.; Perrin, M.; Bertrand, O.; Maby, E. Improving BCI performance through co-adaptation: Applications to the P300-speller. Ann. Phys. Rehabil. Med. 2015, 58, 23–28. [Google Scholar] [CrossRef]
- Yin, E.; Zhou, Z.; Jiang, J.; Yu, Y.; Hu, D. A dynamically optimized SSVEP brain-computer interface (BCI) speller. IEEE Trans. Biomed. Eng. 2014, 62, 1447–1456. [Google Scholar] [CrossRef]
- Nakanishi, M.; Wang, Y.; Wang, Y.; Jung, T. A dynamic stopping method for improving performance of steady-state visual evoked potential based brain-computer interfaces. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 1057–1060. [Google Scholar]
- Jiang, J.; Yin, E.; Wang, C.; Xu, M.; Ming, D. Incorporation of dynamic stopping strategy into the high-speed SSVEP-based BCIs. J. Neural. Eng. 2018, 15, 46025. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.T.; Jung, T.P. Visual stimulus design for high-rate SSVEP BCI. Electron. Lett. 2010, 46, 1057–1058. [Google Scholar] [CrossRef]
- Brainard, D.H. The psychophysics toolbox. Spat. Vis. 1997, 10, 433–436. [Google Scholar] [CrossRef]
- Wong, C.M.; Wan, F.; Wang, B.; Wang, Z.; Nan, W.; Lao, K.F.; Mak, P.U.; Vai, M.I.; Rosa, A. Learning across multi-stimulus enhances target recognition methods in SSVEP-based BCIs. J. Neural. Eng. 2020, 17, 16026. [Google Scholar] [CrossRef]
- Mainsah, B.O.; Collins, L.M.; Colwell, K.A.; Sellers, E.W.; Ryan, D.B.; Caves, K.; Throckmorton, C.S. Increasing BCI communication rates with dynamic stopping towards more practical use: An ALS study. J. Neural. Eng. 2015, 12, 16013. [Google Scholar] [CrossRef]
- Guger, C.; Schlogl, A.; Neuper, C.; Walterspacher, D.; Strein, T.; Pfurtscheller, G. Rapid prototyping of an EEG-based brain-computer interface (BCI). IEEE Trans. Neural. Syst. Rehabil. Eng. 2001, 9, 49–58. [Google Scholar] [CrossRef] [PubMed]
- Oppenheim, A.V.; Schafer, R.W.; Buck, J.R. Discrete-Time Signal Processing, 2nd ed.; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Howell, D.C. Statistical Methods for Psychology; Cengage Learning: Belmont, CA, USA, 2012. [Google Scholar]
- Wang, Y.; Chen, X.; Gao, X.; Gao, S. A Benchmark Dataset for SSVEP-Based Brain–Computer Interfaces. IEEE Trans. Neural. Syst. Rehabil. Eng. 2017, 25, 1746–1752. [Google Scholar] [CrossRef]
- Powell, S.R.; Chau, P.M. A technique for realizing linear phase IIR filters. IEEE Trans. Signal. Process. 1991, 39, 2425–2435. [Google Scholar] [CrossRef]
- Gustafsson, F. Determining the initial states in forward-backward filtering. IEEE Trans. Signal. Process. 1996, 44, 988–992. [Google Scholar] [CrossRef]
- Sadovsky, P.; Bartusek, K. Optimisation of the Transient response of a Digital Filter. Radioengineering 2000, 9, 14–17. [Google Scholar]
- Throckmorton, C.S.; Colwell, K.A.; Ryan, D.B.; Sellers, E.W.; Collins, L.M. Bayesian approach to dynamically controlling data collection in P300 spellers. IEEE Trans. Neural. Syst. Rehabil. Eng. 2013, 21, 508–517. [Google Scholar] [CrossRef] [PubMed]
- Kindermans, P.-J.; Tangermann, M.; Müller, K.-R.; Schrauwen, B. Integrating dynamic stopping, transfer learning and language models in an adaptive zero-training ERP speller. J. Neural. Eng. 2014, 11, 35005. [Google Scholar] [CrossRef] [PubMed]
- Chaudhary, U.; Mrachacz-Kersting, N.; Birbaumer, N. Neuropsychological and neurophysiological aspects of brain-computer-interface (BCI) control in paralysis. J. Physiol. 2020. Added Added Added. [Google Scholar] [CrossRef] [PubMed]
- Klein, E. Chapter 24—Ethics and the emergence of brain-computer interface medicine. In Handbook of Clinical Neurology; Ramsey, N.F., Millán, J.D.R., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; Volume 168, pp. 329–339. [Google Scholar]
- Kögel, J.; Jox, R.J.; Friedrich, O. What is it like to use a BCI?—Insights from an interview study with brain-computer interface users. BMC Med. Ethics 2020, 21, 2. [Google Scholar] [CrossRef]
- Alexis, F.; Wiebke, B.; Henner, G.; Sarah, B. Moral agency without responsibility? Analysis of three ethical models of human-computer interaction in times of artificial intelligence (AI). De Ethica 2020, 6, 3–22. [Google Scholar]
- Klichowski, M. People Copy the Actions of Artificial Intelligence. Front. Psychol. 2020, 11, 1130. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | FS (Maximal Offline ITRs) | DS (Online ITRs) | ||||
|---|---|---|---|---|---|---|
| Length (s) | Accuracy (%) | ITR (bits/min) | Length (s) | Accuracy (%) | ITR (bits/min) | |
| S1 | 0.380 | 83.5 | 259.6 | 0.271 | 82.9 | 292.6 |
| S2 | 0.440 | 94.8 | 303.3 | 0.255 | 84.0 | 305.3 |
| S3 | 0.380 | 90.4 | 297.3 | 0.250 | 84.4 | 309.9 |
| S4 | 0.440 | 87.5 | 262.8 | 0.291 | 83.0 | 285.7 |
| S5 | 0.420 | 92.5 | 296.2 | 0.247 | 85.5 | 317.8 |
| S6 | 0.280 | 90.3 | 334.5 | 0.223 | 93.0 | 380.6 |
| S7 | 0.360 | 87.9 | 289.6 | 0.248 | 87.0 | 327.1 |
| S8 | 0.260 | 92.9 | 361.5 | 0.225 | 98.0 | 420.2 |
| S9 | 0.300 | 90.6 | 327.9 | 0.229 | 93.0 | 377.7 |
| S10 | 0.440 | 86.5 | 257.5 | 0.316 | 80.0 | 260.6 |
| S11 | 0.420 | 91.9 | 292.6 | 0.261 | 90.0 | 340.9 |
| S12 | 0.280 | 88.9 | 325.5 | 0.236 | 89.0 | 345.9 |
| Ave ± Std | 0.367 ± 0.069 | 89.8 ± 3.1 | 300.7 ± 32.2 | 0.254 ± 0.028 | 87.5 ± 5.2 | 330.4 ± 45.4 |
| Subject | Trial Length (s) | No. of Trials | Spelling Rate | ITR |
|---|---|---|---|---|
| (Gaze Shifting + Stimulating) | (Correct/Incorrect) | (cpm) | (bits/min) | |
| S1 | 1.279 (1.0 + 0.279) | 57 (48/9) | 39.5 | 180.9 |
| S2 | 1.262 (1.0 + 0.262) | 89 (66/23) | 35.3 | 148.9 |
| S3 | 1.276 (1.0 + 0.276) | 85 (64/21) | 35.4 | 150.9 |
| S4 | 1.283 (1.0 + 0.283) | 95 (73/22) | 35.9 | 155.2 |
| S5 | 1.455 (1.2 + 0.255) | 93 (77/16) | 34.1 | 154.7 |
| S6 | 1.047 (0.8 + 0.247) | 73 (60/13) | 47.1 | 212.3 |
| S7 | 1.264 (1.0 + 0.264) | 120 (92/28) | 36.4 | 156.9 |
| S8 | 1.287 (1.0 + 0.287) | 54 (51/3) | 44 | 220 |
| S9 | 1.315 (1.0 + 0.315) | 81 (66/15) | 37.2 | 166.6 |
| S10 | 1.308 (1.0 + 0.308) | 97 (73/24) | 34.5 | 147.1 |
| S11 | 1.290 (1.0 + 0.290) | 61 (52/9) | 39.6 | 183.2 |
| S12 | 1.248 (1.0 + 0.248) | 61 (50/11) | 39.4 | 177.3 |
| Ave ± Std | - | - | 38.2 ± 4.0 | 171.2 ± 24.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, J.; Xu, M.; Han, J.; Liu, M.; Dai, T.; Chen, S.; Ming, D. Optimizing SSVEP-Based BCI System towards Practical High-Speed Spelling. Sensors 2020, 20, 4186. https://doi.org/10.3390/s20154186
Tang J, Xu M, Han J, Liu M, Dai T, Chen S, Ming D. Optimizing SSVEP-Based BCI System towards Practical High-Speed Spelling. Sensors. 2020; 20(15):4186. https://doi.org/10.3390/s20154186
Chicago/Turabian StyleTang, Jiabei, Minpeng Xu, Jin Han, Miao Liu, Tingfei Dai, Shanguang Chen, and Dong Ming. 2020. "Optimizing SSVEP-Based BCI System towards Practical High-Speed Spelling" Sensors 20, no. 15: 4186. https://doi.org/10.3390/s20154186
APA StyleTang, J., Xu, M., Han, J., Liu, M., Dai, T., Chen, S., & Ming, D. (2020). Optimizing SSVEP-Based BCI System towards Practical High-Speed Spelling. Sensors, 20(15), 4186. https://doi.org/10.3390/s20154186