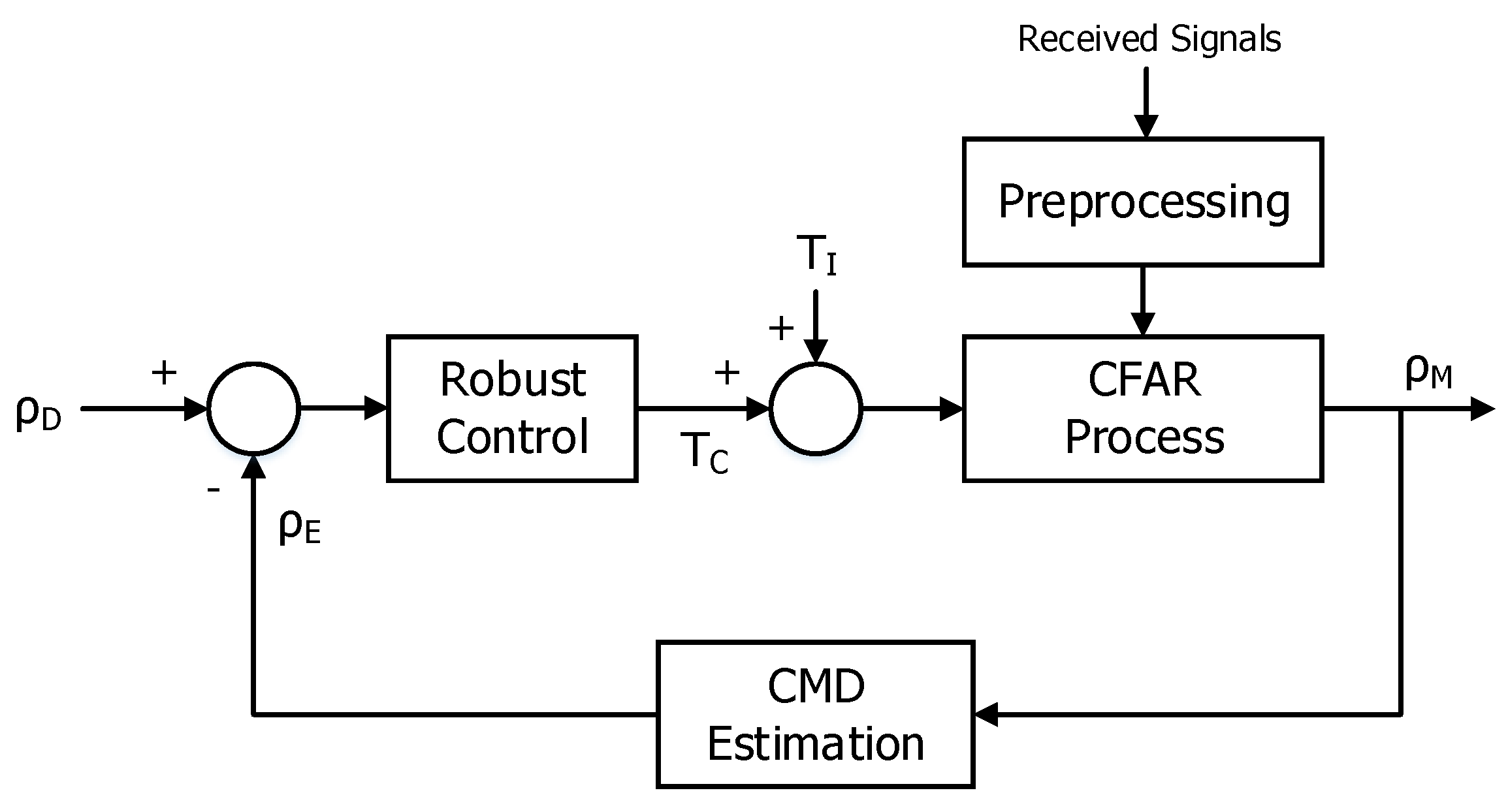
If a feedback structure for controlling the detection threshold is combined with the conventional CFAR process, it can help overcome the fundamental limitation in cluttered environments. The aim of the feedback control for the CFAR process is to adjust the detection threshold to minimize the error of caused by the model difference between a presumed PDF and a true PDF of clutter signals. Moreover, the controller should have the capability of robustness, rather than precision, due to the dynamic range of clutter signals.
The preprocessing executes the integration for received signals and then the CFAR process performs the detection for the output of the preprocessing with an ideal detection threshold () at the initial epoch. The CMD estimation calculates an estimated CMD () from a measured CMD () based on the output of the CFAR process. The robust control generates an additive detection threshold () based on the difference between a desired CMD () and an estimated CMD which is related to the error of for the PDF. Therefore, the detection threshold of the CFAR process will be adjusted automatically until equals to . In addition, any CFAR process, including the latest CFAR process as well as the conventional CFAR process with an open loop structure in terms of , can be applied to the proposed structure and a designer can set related to to an affordable level of a radar system in cluttered environments. It can also be used in clutter-free environments by considering an ideal based on the PDF of a system noise, and then may be zero. Therefore, a radar system will become more robust if a designer manages the level of adaptively as the condition of an operating environment. For example, in case of operating the medium pulse repetition frequency (PRF) waveform mode, a designer can normally set to a lower level because the system tries to locate a target signal into a clutter-free region by selecting an optimized PRF. However, the situation that clutter signals are included in an ROI can happen owing to the encounter angle and maneuvering property of a target and the hardware limitation for the range of PRF. Moreover, the PDF of clutter signals in the ROI may be very different from a presumed PDF because of the folding effect of a PRF for clutter signals. By adjusting to a higher level, the radar system can maintain the detection performance adaptively in the situation.
3.1. Preprocessing for Received Signals
The amplitude of clutter signals can fluctuate by more than two orders of amplitude. Owing to the original nature of clutter signals, it can be difficult to control the detection threshold stably and the
for the target signal can severely be decreased though
is achieved. The preprocessing, such as coherent and noncoherent integration, improves the detection performance. The coherent integration can basically be applied for increasing
. Moreover, the noncoherent integration affects the variance for the PDF of the clutter signals so that it can reduce
and raise
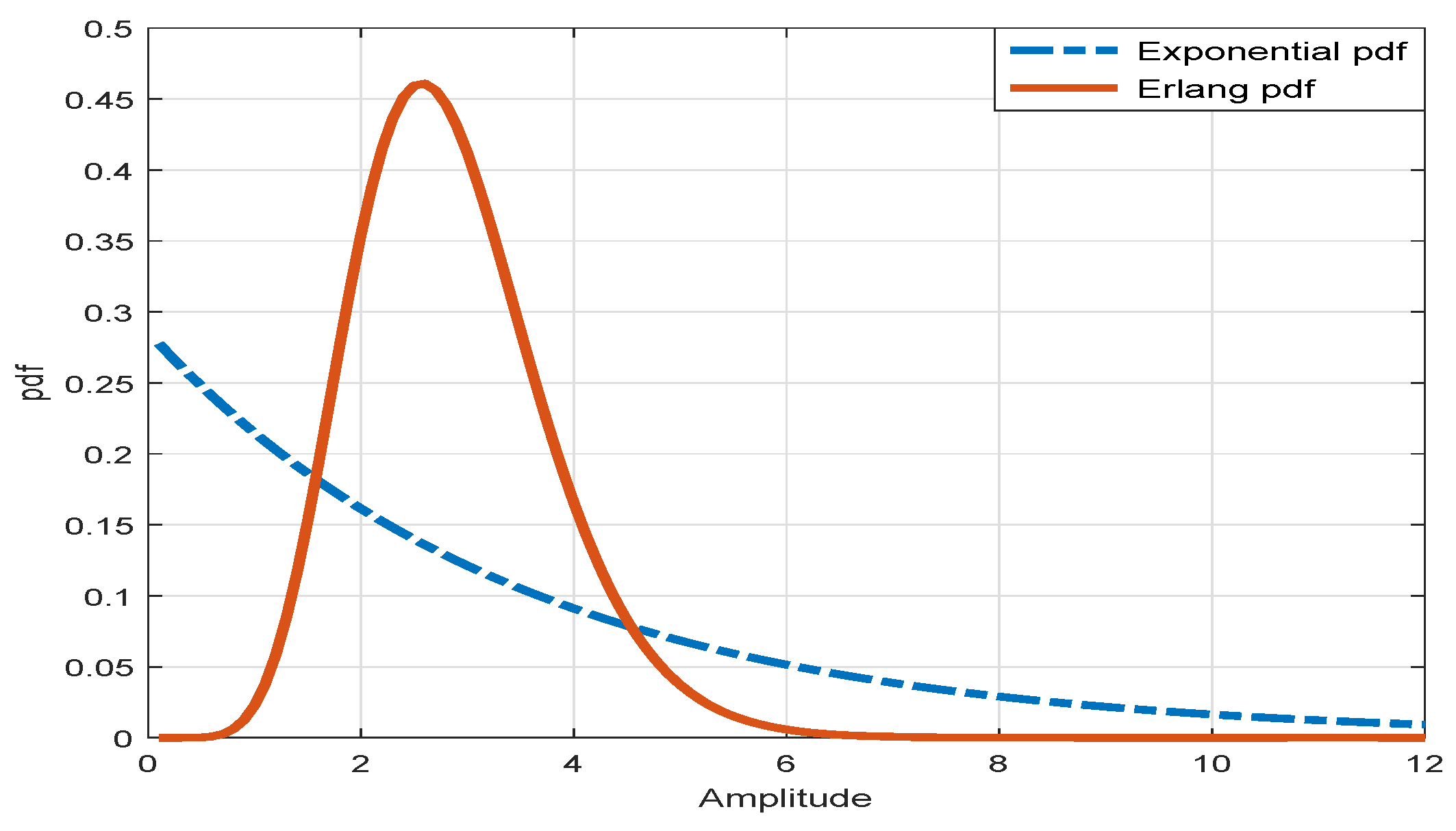
indirectly. It is well known that the limited sum for the random samples of the exponential PDF becomes a random variable with the Erlang PDF given that the samples are independent identically distributed as
where
is the number of samples for the noncoherent integration.
Figure 5 shows that the long tail of the exponential PDF becomes shortened via the sum for the samples of the exponential PDF.
In addition, the exponential PDF is transformed to the Gaussian PDF as the number of samples becomes larger () based on the central limit theorem, and thus the variance of the PDF is dramatically reduced. However, in actual applications, there will be limitations for increasing the number of samples owing to factors, such as range walk of target and signal processing load. Consequently, the preprocessing chain with the sequential combination of the coherent and the noncoherent integration, which is a design parameter in a radar system, can be helpful for decreasing the dynamic range of clutter signals and improving the detection performance for a target signal.
3.2. CMD Estimation
The CMD is proportional to the
from clutter signals and can be estimated at time
k by
where
is the estimated number of the measurements for clutter signals within an ROI,
is the volume of the ROI that is typically defined by the covariance information of predicted states, and
is the constant determined by the design parameters of a system.
The standard estimator for the CMD based on the PTE is proposed in the integrated probabilistic data association (IPDA) filter [
8] as
where
is the number of the measurements for received signals at time
k,
is the probability that there exists a target signal within an ROI,
is the event that there exists a target within an ROI at time
k,
is the sequence of all measurement sets from the initial time to time
;
}, and
means the predicted PTE with all measurement sets up to time
.
It may be speculated that the estimated number of the measurements for clutter signals equals the difference between the number of the measurements for received signals and the estimated number of the measurement for a target signal that is expressed by the probability for the joint event which a target exists, a target signal falls into an ROI, and a target signal is detected given that the number of a target signal is only one and the rest of the signals originate from clutter. It may yield a biased output, particularly in the case that there is no target within an ROI [
17].
The conditional mean estimator for the CMD based on the probability of target perceivability, in which a target is perceivable if it exists and is detectable, is proposed [
12] and is expressed by
with
where
is the number of the measurement for a target signal,
is the likelihood function for
given that the number of the measurement for a target signal is equal to one and the acquired measurement sets are
, and
denotes the predicted probability of target perceivability with all measurement sets up to time
.
The probability of target perceivability is conceptually analogous to the PTE with a Markov chain one model for the propagation of target existence. Although the notion of target perceivability rigorously differs from that of target existence, target existence implies target detectability in a Markov chain one model. In a Markov chain two model, on the other hand, target existence and target detectability are so separated that the condition that a target exists and is nondetectable can be considered [
18]. The conditional mean estimator is distribution free and theoretically yields an unbiased result using all measurements up to time
k. However, there exists the contradiction that for calculating
,
must be known in advance. Hence, an additional iteration process has to be required to obtain a practical solution.
The maximum likelihood estimator for the CMD is also proposed given that the CMD at each time is unknown but nonrandom [
12].
with
It can be the complementary estimator to provide the initial estimate required by another estimator as well as the primary estimator for the CMD. It can yield a biased result in practice since it is required to set a lower limit value in order to prevent a numerical error and very difficult to be well integrated with a tracking filter.
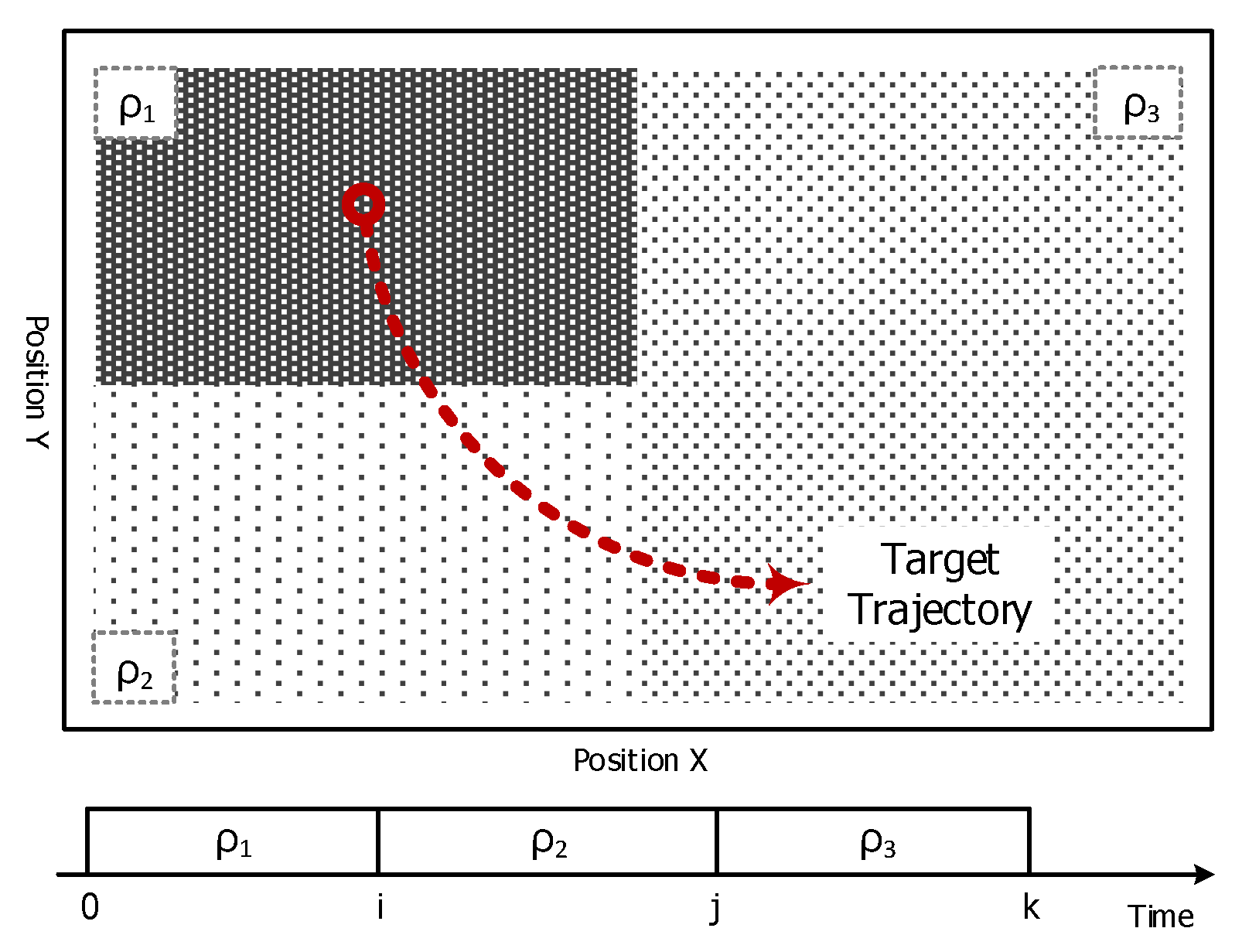
These track-oriented CMDEs fundamentally use all past observations from the initial time to the current time. However, the CMD may be changed in time, especially in a heterogeneous region as shown in
Figure 6, such that CMDs related to each measurement sets can be different for each other and the only measurement sets over a limited time duration will be the meaningful information for estimating the current CMD.
To the best of the authors’ knowledge, it is reasonable to estimate the current CMD using the measurement sets over the finite time interval on the assumption that CMD is a constant during a short time. Therefore, we propose the CMDE based on conditional mean with finite measurement sets as follows:
with
where
N is the size of finite measurement sets,
is the sample mean for the number of measurement sets at time
k, and
denotes the predicted PTE with finite measurement sets.
The PTE with finite measurement sets must be derived for calculating the proposed CMDE. First, the predicted PTE with finite measurement sets is simply obtained by applying the propagation matrix of the Markov chain one model as
where
is the event that there is no target within an ROI at time
k and
is the element of the matrix for the transitional probabilities between the states of target existence with the constraint:
.
It is generally recommended to set
and
since the value of
means the transitional probability that a false target turns into a true target, so the issue is not in the tracking phase but in the initialization phase of a tracking filter [
9].
On the assumption that the measurement sets
and
are conditionally independent given
or
because all past events of target existence can be known by the current event of target existence via the backward Markov chain propagation matrix [
19], the PTE with the measurement sets up to time
k can be expressed as follows:
Hence, the PTE with the measurement sets from time
to time
k is simply expressed by
Moreover, the ratio of the probability of target existence to the probability of target non-existence with the measurement sets from time
to time
k is written as
To build the recursive formula, the ratio of the probability of target existence to the probability of target non-existence with the measurement sets from time
to time
is expressed by
Finally, the relationship between each ratio of the probability of target existence to the probability of target non-existence is derived via combining Equation (
21) with Equation (
22), and it can also be written as the prevalent Formula (24).
Here,
is the measurement likelihood ratio at time
k [
20] and
is the function of the Markov chain propagation matrix, the measurement likelihood ratio, and the PTE at time
.
The measurement likelihood ratio at time
k is expressed by
where
is the Gaussian PDF,
is
i-th measurement at time
k, and
and
are the predicted mean and covariance for measurement of the tracking filter.
The function
is expressed as follows; the detailed derivation is shown in the
Appendix A.
Here, is the measurement likelihood ratio at time .
Note that it has a similar form to the PTE with the measurement sets from the initial time to time
k except for the term of the measurement likelihood ratio. It can be seen that for updating the PTE with finite measurement sets at time
k, the information for the obtained measurement at time
k is exploited, but the information for the acquired measurement and the PTE at time
is discarded after being propagated up to time
k.
Here, is the associated event that the i-th measurement of originates from the target and the rest are from clutter at time k.
3.3. Robust Control
Despite the preprocessing for received signals, the amplitude of the signals can still fluctuate somewhat owing to the limit for the number of the integration and the correlation degree of samples [
21]. The scintillation effect will be considered as a disturbance input for controlling the detection threshold toward
from the viewpoint of the control concept. Therefore, it is reasonable to apply the robust controller to minimize the effect of the disturbance for the CFAR process.
In general, proportional-integral-derivative (PID) control is the most intuitive control method due to clearly physical meanings. It can be used irrespective of system dynamics so that it has been widely accepted in industry. For applying the PID controller to the CFAR process, the state vector of the difference for CMD is defined by
As mentioned before, the system dynamics of the state vector will have a nonlinear function with unknown parameters. On the assumption that the system modeling errors caused by the difference between a true PDF and an exponential PDF presumed for clutter signals and linearizing the nonlinear system are considered as a disturbance term, the linear system dynamics of the state vector can be expressed by
with
where
u is a control input,
w is a disturbance input, and
are arbitrary variables.
To minimize the effect of the disturbance for the given system with Equation (
29), the
performance index has to be defined by
where
is the Lyapunov function,
Q is a state weighting matrix,
R is a control input weighting matrix, and
is the
gain related to the disturbance suppression.
The Hamilton–Jacobi–Isaacs (HJI) equation is generally derived from the optimization for the
performance index. Both the optimal control input,
control, and the allowable maximal disturbance input can be determined after finding the Lyapunov function satisfied with the HJI equation, but it is very difficult to obtain the solution.
Hence, the theorem of inverse optimal PID control can help overcome such difficulty. First, the control input weighting matrix and the Lyapunov function are defined with the constraints:
.
with
As a result, the HJI equation is converted into the algebraic Riccati equation for any
, and the state weighting matrix
can be found as a solution.
If the matrix Q exists with some conditions, then the control input can be expressed as the form of a PID controller.
Furthermore, the closed loop control system is extended disturbance input-to-state stable based on the following condition [
22,
23].
Note that the matrix Q is the function of the elements of the matrix A and the gains of the controller so that it will satisfy the Riccati equation with a limited range for each element of matrix A given that the gains are fixed. For the example of , , the element is in the range from −16.5 to −0.1, the element is in the range from −1030 to −10, and the element is in the range from −124 to −16 for the solution. In addition, the larger the value of , the smaller the allowable maximal disturbance input, i.e., the robustness of a control system for a disturbance is decreased.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








