Quadrotor-Based Lighthouse Localization with Time-Synchronized Wireless Sensor Nodes and Bearing-Only Measurements

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
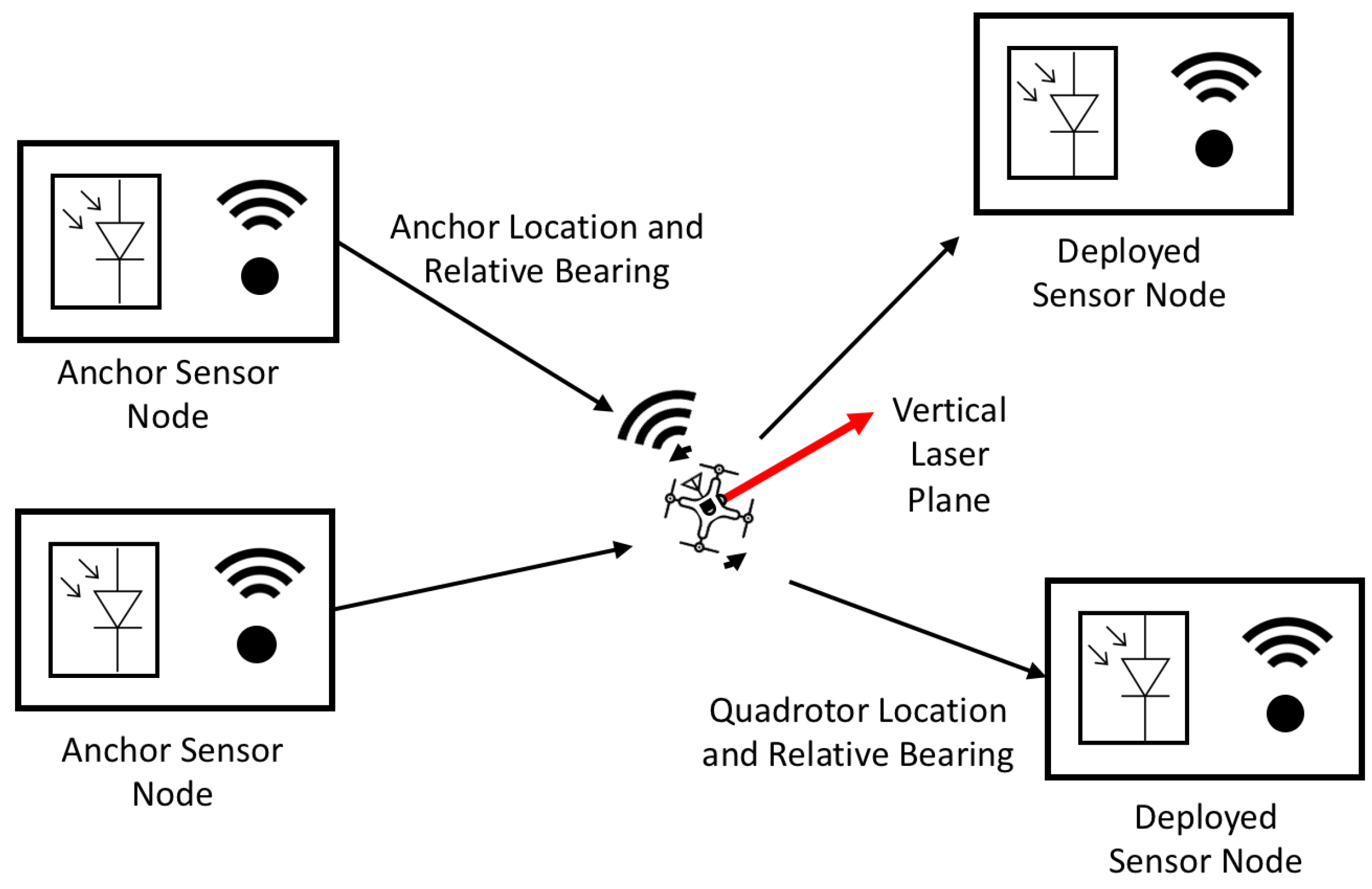
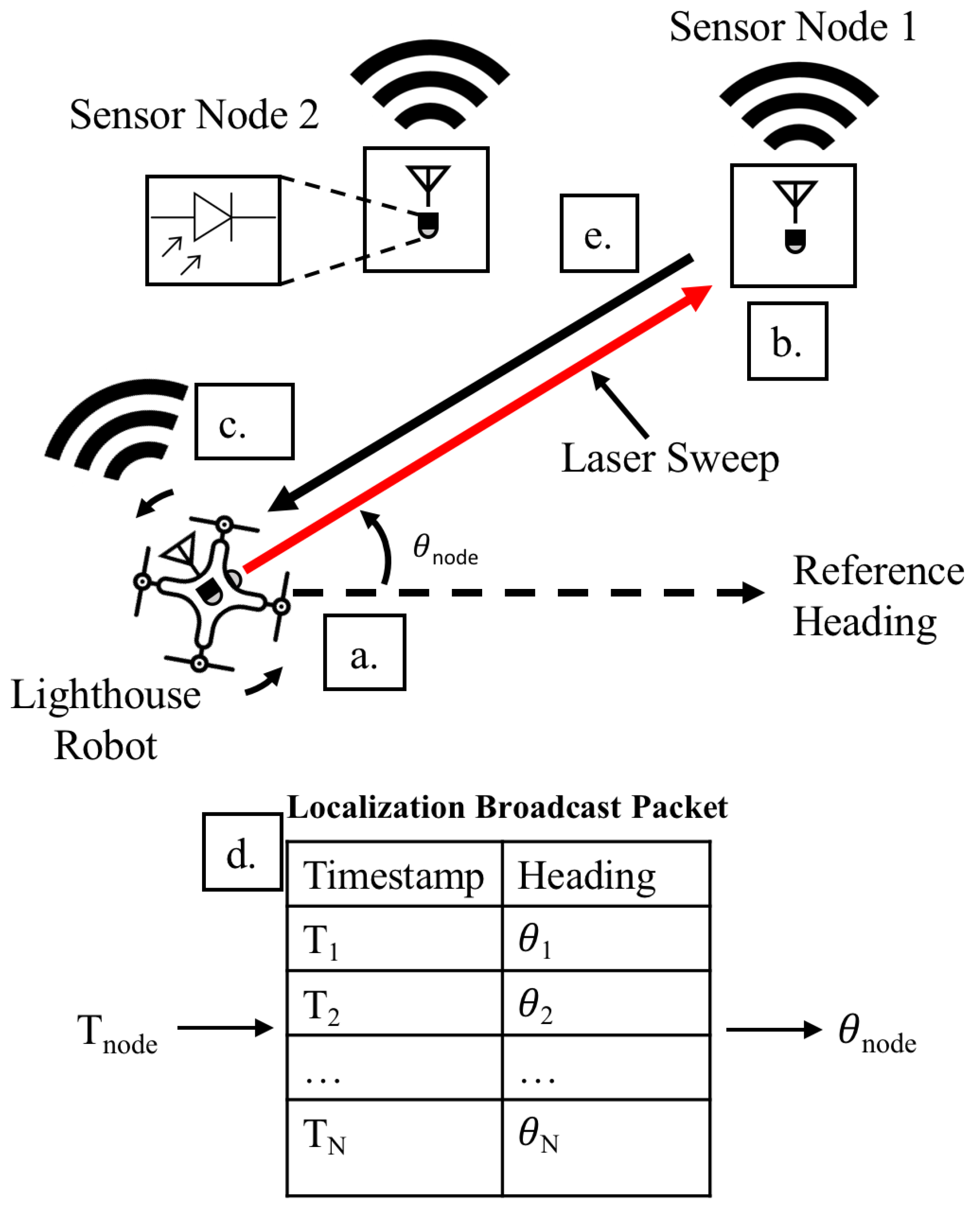
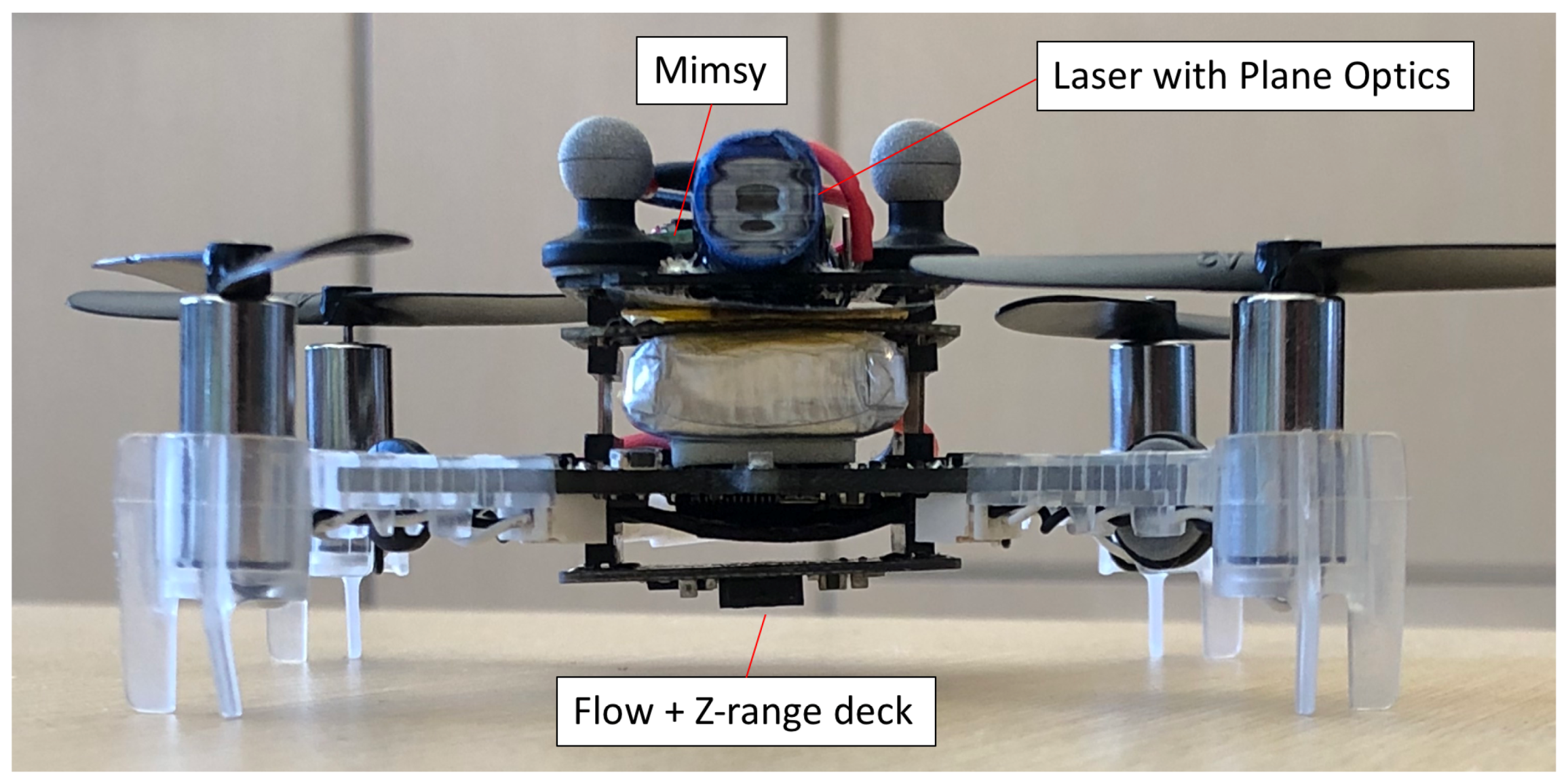
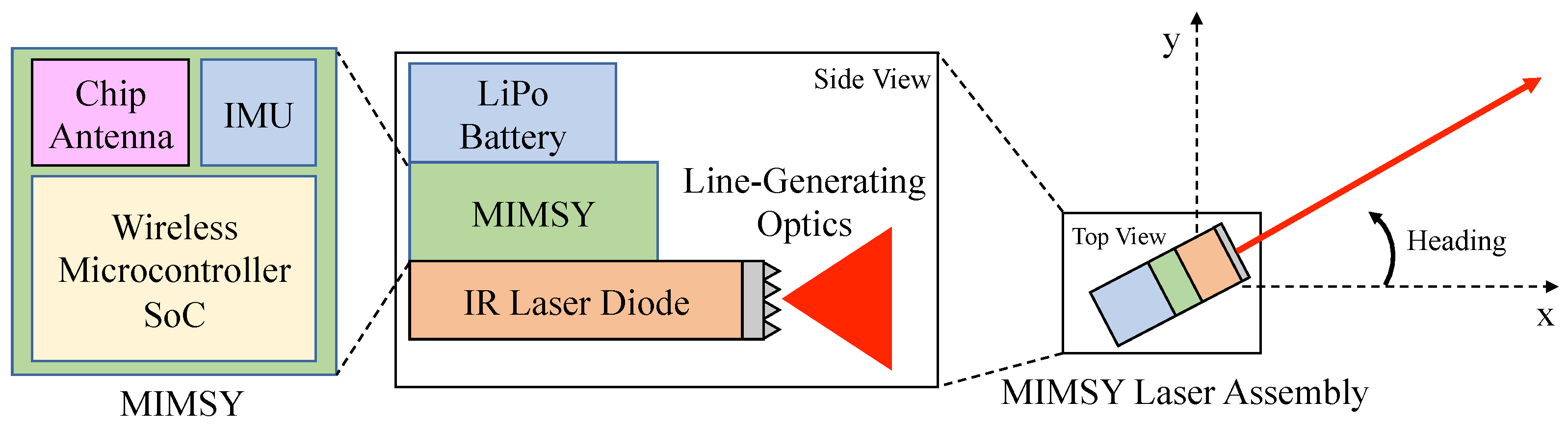
2.1. Robotic Lighthouse Localization System
2.2. Wireless Reliability
2.3. State Estimation
Quadrotor Localization with Bearing Measurements
3. Results
Wireless Sensor Node Localization Simulation
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ghosh, P.; Gasparri, A.; Jin, J.; Krishnamachari, B. Robotic Wireless Sensor Networks. arXiv, 2017; arXiv:1705.05415. [Google Scholar]
- Penders, J.; Alboul, L.; Witkowski, U.; Naghsh, A.; Saez-Pons, J.; Herbrechtsmeier, S.; El-Habbal, M. A robot swarm assisting a human fire-fighter. Adv. Rob. 2011, 25, 93–117. [Google Scholar] [CrossRef]
- Batalin, M.A.; Sukhatme, G.S. Coverage, exploration and deployment by a mobile robot and communication network. Telecommun. Syst. 2004, 26, 181–196. [Google Scholar] [CrossRef]
- Correll, N.; Bachrach, J.; Vickery, D.; Rus, D. Ad-hoc wireless network coverage with networked robots that cannot localize. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 3878–3885. [Google Scholar]
- Weiss, M.D.; Peak, J.; Schwengler, T. A Statistical Radio Range Model for a Robot MANET in a Subterranean Mine. IEEE Trans. Veh. Technol. 2008, 57, 2658–2666. [Google Scholar] [CrossRef]
- Iliev, N.; Paprotny, I. Review and comparison of spatial localization methods for low-power wireless sensor networks. IEEE Sens. J. 2015, 15, 5971–5987. [Google Scholar] [CrossRef]
- Mao, G.; Fidan, B.; Anderson, B.D. Wireless sensor network localization techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef]
- Merriaux, P.; Dupuis, Y.; Boutteau, R.; Vasseur, P.; Savatier, X. A study of vicon system positioning performance. Sensors 2017, 17, 1591. [Google Scholar] [CrossRef]
- Mueller, M.W.; Hamer, M.; D’Andrea, R. Fusing ultra-wideband range measurements with accelerometers and rate gyroscopes for quadrocopter state estimation. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), San Francisco, CA, USA, 26–30 May 2015; IEEE: Seattle, WA, USA, 2015; pp. 1730–1736. [Google Scholar] [CrossRef]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Rob. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Römer, K. The lighthouse location system for smart dust. In Proceedings of the 1st International Conference on Mobile Systems, Applications and Services, San Francisco, CA, USA, 5–8 May 2003; ACM: New York, NY, USA, 2003; pp. 15–30. [Google Scholar]
- Warneke, B.; Last, M.; Liebowitz, B.; Pister, K.S. Smart dust: Communicating with a cubic-millimeter computer. Computer 2001, 34, 44–51. [Google Scholar] [CrossRef]
- Campos, F.M.R.; Schindler, C.B.; Kilberg, B.G.; Pister, K.S.J. Lighthouse Localization of Wireless Sensor Networks for Latency-Bounded, High-Reliability Industrial Automation Tasks. In Proceedings of the 2020 16th IEEE International Conference on Factory Communication Systems (WFCS), Porto, Portugal, 27–29 April 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–8. [Google Scholar]
- Borges, M.; Symington, A.C.; Coltin, B.; Smith, T.; Ventura, R. HTC Vive: Analysis and Accuracy Improvement. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 2610–2615. [Google Scholar]
- Yang, Y.; Weng, D.; Li, D.; Xun, H. An Improved Method of Pose Estimation for Lighthouse Base Station Extension. Sensors 2017, 17, 2411. [Google Scholar] [CrossRef]
- Maksimovic, F.; Wheeler, B.; Burnett, D.C.; Khan, O.; Mesri, S.; Suciu, I.; Lee, L.; Moreno, A.; Sundararajan, A.; Zhou, B.; et al. A Crystal-Free Single-Chip Micro Mote with Integrated 802.15. 4 Compatible Transceiver, sub-mW BLE Compatible Beacon Transmitter, and Cortex M0. In 2019 Symposium on VLSI Circuits; IEEE: Piscataway, NJ, USA, 2019; pp. C88–C89. [Google Scholar]
- Wheeler, B.; Ng, A.; Kilberg, B.; Maksimovic, F.; Pister, K.S.J. A Low-Power Optical Receiver for Contact-free Programming and 3D Localization of Autonomous Microsystems. In Proceedings of the IEEE UEMCON, New York, NY, USA, 10–12 October 2019. [Google Scholar]
- Kilberg, B.G.; Campos, F.M.R.; Maksimovic, F.; Pister, K.S.J. Accurate 3D Lighthouse Localization of a Low-Power Crystal-Free Single Chip Mote. In Solid-State Sensors, Actuatorsand Microsystems Workshop (Hilton Head); IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Nemsick, B.E.; Buchan, A.D.; Nagabandi, A.; Fearing, R.S.; Zakhor, A. Cooperative inchworm localization with a low cost team. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May –3 June 2017; IEEE: PIscataway, NJ, USA, 2017; pp. 6323–6330. [Google Scholar]
- Grabowski, R.; Navarro-Serment, L.E.; Paredis, C.J.; Khosla, P.K. Heterogeneous teams of modular robots for mapping and exploration. Autonom. Rob. 2000, 8, 293–308. [Google Scholar] [CrossRef]
- Roumeliotis, S.I.; Bekey, G.A. Distributed multirobot localization. IEEE Trans. Rob. Autom. 2002, 18, 781–795. [Google Scholar] [CrossRef]
- Fabresse, F.R.; Caballero, F.; Ollero, A. Decentralized simultaneous localization and mapping for multiple aerial vehicles using range-only sensors. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 6408–6414. [Google Scholar] [CrossRef]
- Wanasinghe, T.R.; Mann, G.K.I.; Gosine, R.G. Distributed collaborative localization for a heterogeneous multi-robot system. In Proceedings of the 2014 IEEE 27th Canadian Conference on Electrical and Computer Engineering (CCECE), Toronto, ON, Canada, 4–7 May 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6. [Google Scholar]
- Hoffmann, G.M.; Tomlin, C.J. Mobile Sensor Network Control Using Mutual Information Methods and Particle Filters. IEEE Trans. Autom. Control 2010, 55, 32–47. [Google Scholar] [CrossRef]
- Hammel, S.; Liu, P.; Hilliard, E.; Gong, K. Optimal observer motion for localization with bearing measurements. Comput. Math. Appl. 1989, 18, 171–180. [Google Scholar] [CrossRef]
- Grocholsky, B.; Makarenko, A.; Durrant-Whyte, H. Information-theoretic coordinated control of multiple sensor platforms. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; IEEE: Piscataway, NJ, USA, 2003; pp. 1521–1526. [Google Scholar]
- Bergbreiter, S.; Mehta, A.; Pister, K.S. PhotoBeacon: Design of an optical system for localization and communication in multi-robot systems. In Proceedings of the ROBOCOMM 2007, Athens, Greece, 14–16 October 2007; p. 5. [Google Scholar]
- Roberts, J.F.; Stirling, T.; Zufferey, J.C.; Floreano, D. 3-D relative positioning sensor for indoor flying robots. Autonom. Rob. 2012, 33, 5–20. [Google Scholar] [CrossRef]
- Stirling, T.; Roberts, J.; Zufferey, J.; Floreano, D. Indoor navigation with a swarm of flying robots. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 4641–4647. [Google Scholar]
- Watteyne, T.; Vilajosana, X.; Kerkez, B.; Chraim, F.; Weekly, K.; Wang, Q.; Glaser, S.; Pister, K. OpenWSN: A standards-based low-power wireless development environment. Trans. Emerg. Telecommun. Technol. 2012, 23, 480–493. [Google Scholar] [CrossRef]
- Schindler, C.B.; Drew, D.S.; Kilberg, B.G.; Campos, F.M.; Yanase, S.; Pister, K.S. MIMSY: The Micro Inertial Measurement System for the Internet of Things. In Proceedings of the 2019 IEEE 5th World Forum on Internet of Things (WF-IoT), Limerick, Ireland, 15–18 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 329–334. [Google Scholar]
- Pister, K.; Doherty, L. TSMP: Time synchronized mesh protocol. IASTED Distrib. Sens. Netw. 2008, 391, 398. [Google Scholar]
- Watteyne, T.; Mehta, A.; Pister, K. Reliability through frequency diversity: Why channel hopping makes sense. In Proceedings of the 6th ACM Symposium on Performance Evaluation of Wireless Ad Hoc, Sensor, and Ubiquitous Networks, Canary Islands, Spain, 29–30 October 2009; ACM: New York, NY, USA, 2009; pp. 116–123. [Google Scholar]
- IEEE 802.15.4e-2012—IEEE Standard for Local and Metropolitan Area Networks–Part 15.4: Low-Rate Wireless Personal Area Networks (LR-WPANs) Amendment 1: MAC Sublayer. Available online: https://ieeexplore.ieee.org/document/6012487 (accessed on 12 July 2020).
- Vilajosana, X.; Pister, K.; Watteyne, T. Minimal IPv6 over the TSCH Mode of IEEE 802.15.4e (6TiSCH) Configuration. RFC 8180. 2017. Available online: https://tools.ietf.org/html/rfc8180 (accessed on 12 July 2020).
- Luvisotto, M.; Pang, Z.; Dzung, D. Ultra High Performance Wireless Control for Critical Applications: Challenges and Directions. IEEE Trans. Ind. Inf. 2017, 13, 1448–1459. [Google Scholar] [CrossRef]
- Swamy, V.N.; Suri, S.; Rigge, P.; Weiner, M.; Ranade, G.; Sahai, A.; Nikolic, B. Cooperative communication for high-reliability low-latency wireless control. IEEE Int. Conf. Commun. 2015, 4380–4386. [Google Scholar] [CrossRef]
- Kilberg, B.; Schindler, C.B.; Sundararajan, A.; Yang, A.; Pister, K.S.J. Experimental Evaluation of Low-Latency Diversity Modes in IEEE 802.15.4 Networks. In Proceedings of the 2018 IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA), Torino, Italy, 4–7 September 2018; IEEE: Piscataway, NJ, USA, 2018; Volume 1, pp. 211–218. [Google Scholar]
- Schindler, C.B.; Watteyne, T.; Vilajosana, X.; Pister, K.S.J. Implementation and characterization of a multi-hop 6TiSCH network for experimental feedback control of an inverted pendulum. In Proceedings of the 2017 15th International Symposium on Modeling and Optimization in Mobile, Ad Hoc, and Wireless Networks, WiOpt 2017, Paris, France, 15–19 May 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Mueller, M.W.; Hehn, M.; D’Andrea, R. Covariance correction step for kalman filtering with an attitude. J. Guid. Control Dyn. 2016, 40, 2301–2306. [Google Scholar] [CrossRef]
- Mehta, A.; Kerkez, B.; Glaser, S.D.; Pister, K.S. TDMA-based dual-mode communication for mobile wireless sensor networks. Sensors 2012, 12, 16194–16210. [Google Scholar] [CrossRef] [PubMed]
















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kilberg, B.G.; Campos, F.M.R.; Schindler, C.B.; Pister, K.S.J. Quadrotor-Based Lighthouse Localization with Time-Synchronized Wireless Sensor Nodes and Bearing-Only Measurements. Sensors 2020, 20, 3888. https://doi.org/10.3390/s20143888
Kilberg BG, Campos FMR, Schindler CB, Pister KSJ. Quadrotor-Based Lighthouse Localization with Time-Synchronized Wireless Sensor Nodes and Bearing-Only Measurements. Sensors. 2020; 20(14):3888. https://doi.org/10.3390/s20143888
Chicago/Turabian StyleKilberg, Brian G., Felipe M. R. Campos, Craig B. Schindler, and Kristofer S. J. Pister. 2020. "Quadrotor-Based Lighthouse Localization with Time-Synchronized Wireless Sensor Nodes and Bearing-Only Measurements" Sensors 20, no. 14: 3888. https://doi.org/10.3390/s20143888
APA StyleKilberg, B. G., Campos, F. M. R., Schindler, C. B., & Pister, K. S. J. (2020). Quadrotor-Based Lighthouse Localization with Time-Synchronized Wireless Sensor Nodes and Bearing-Only Measurements. Sensors, 20(14), 3888. https://doi.org/10.3390/s20143888