Reactive Autonomous Navigation of UAVs for Dynamic Sensing Coverage of Mobile Ground Targets




Abstract
1. Introduction
2. Related Work
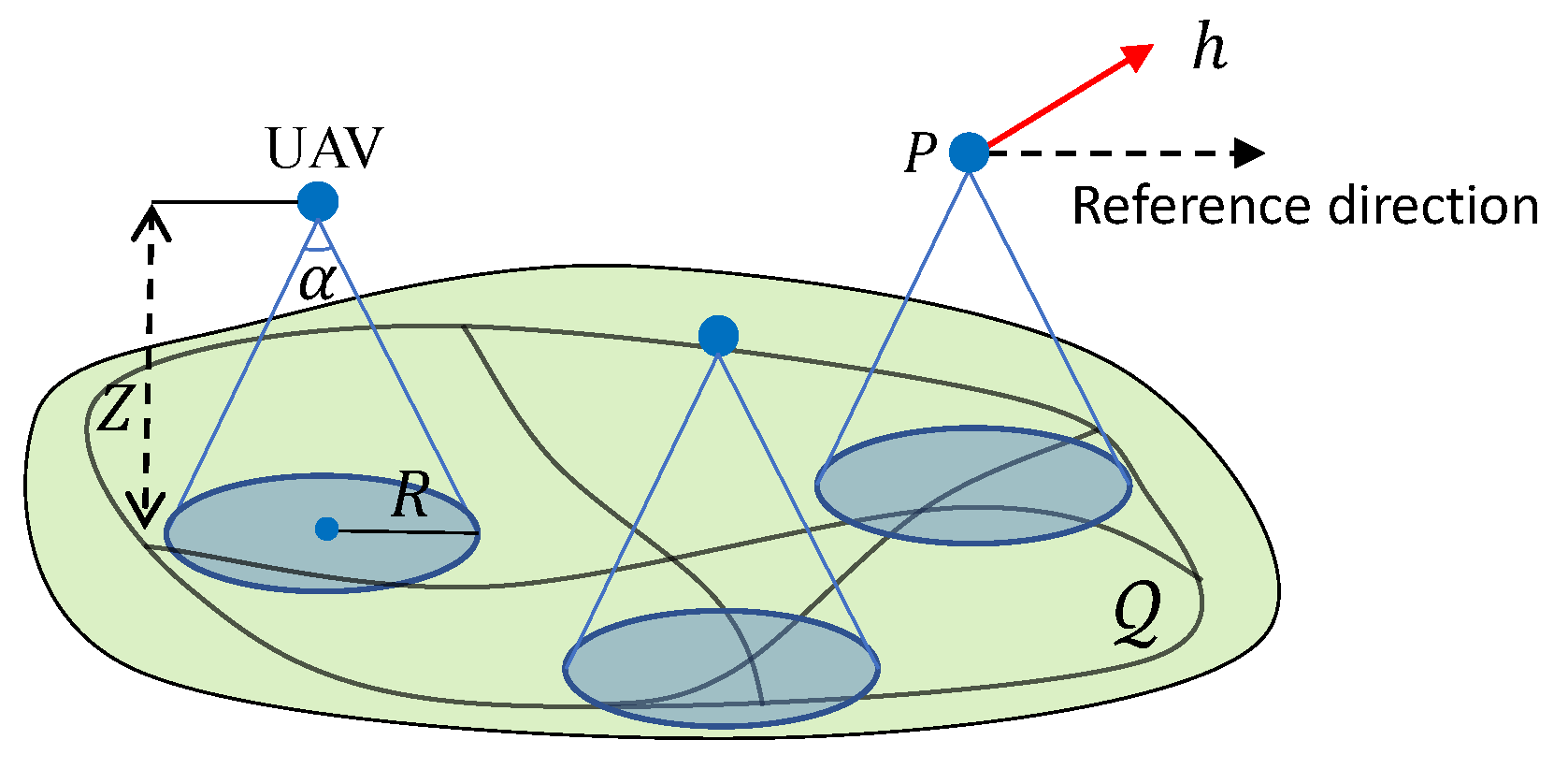
3. System Model and Problem Statement
4. Methodology and Main Results
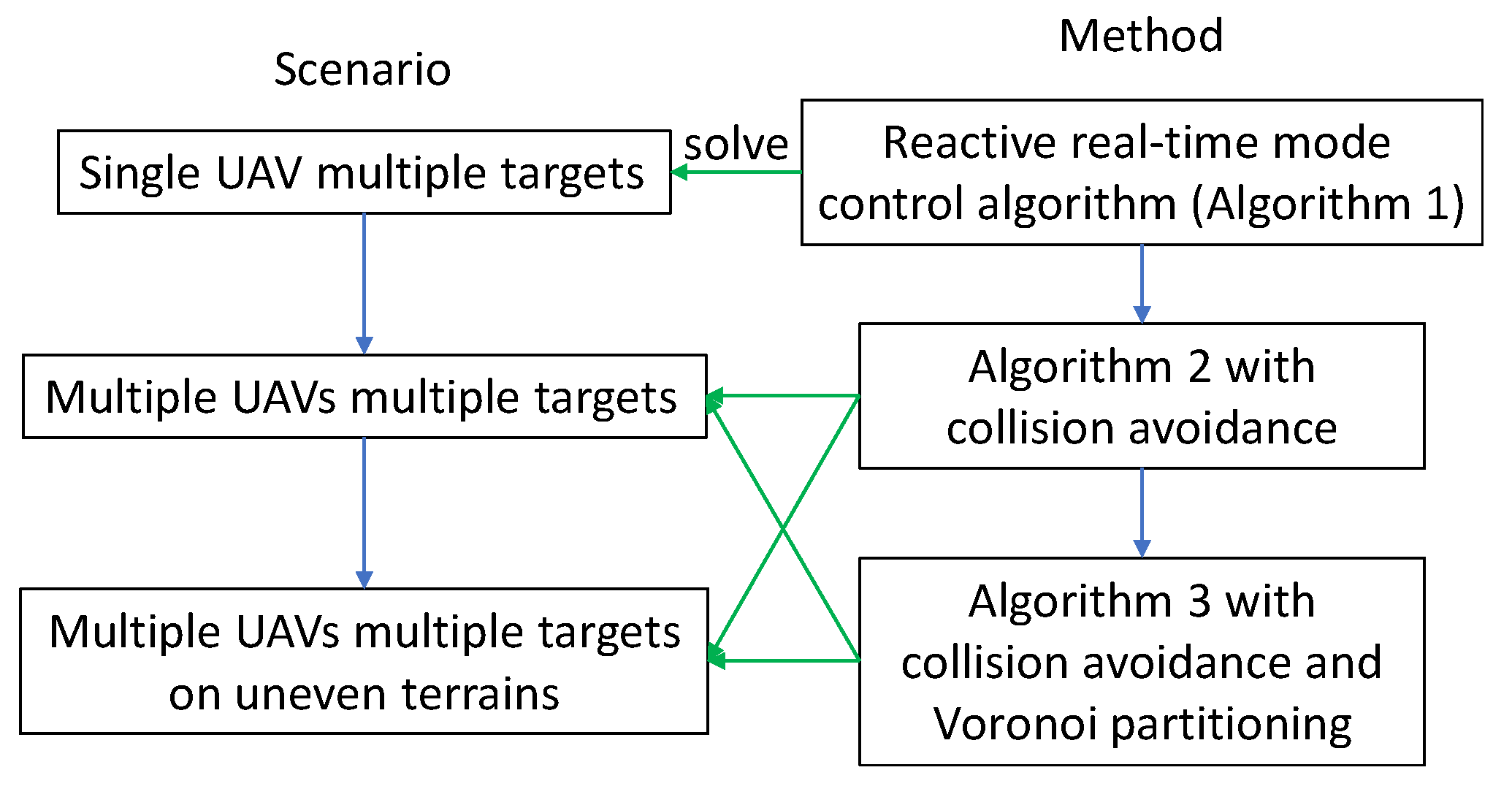
4.1. Methodology
4.2. Navigation Algorithm for a Single UAV
| Algorithm 1: Online reactive navigation algorithm for a single UAV. |
 |
4.3. Navigation Algorithm for Multiple UAVs
| Algorithm 2: Online reactive navigation algorithm for each UAV of the team. |
 |
4.4. VP-Based Navigation Algorithm for Multiple UAVs
| Algorithm 3: VP-based Online reactive navigation algorithm for each UAV of the team. |
 |
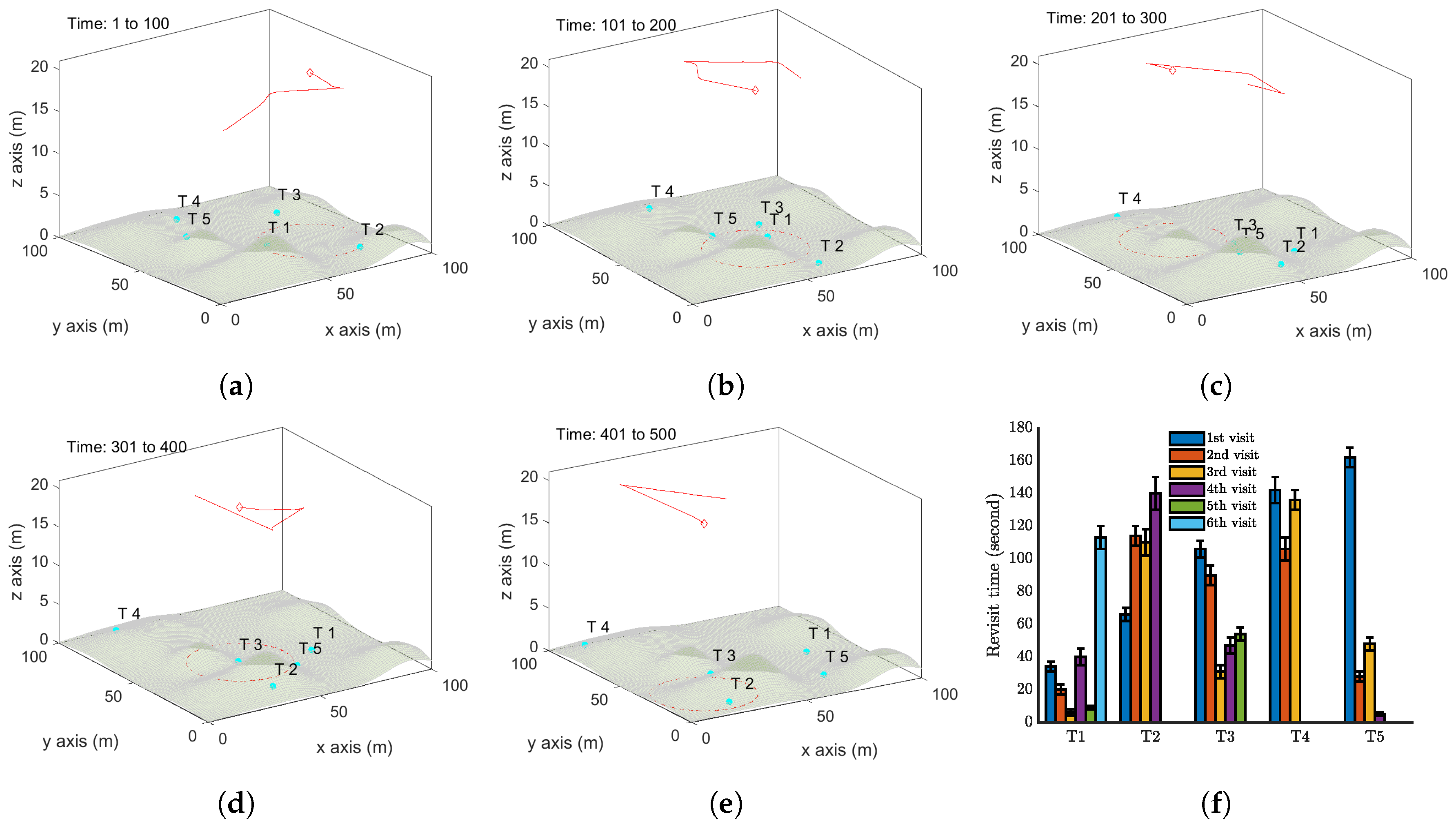
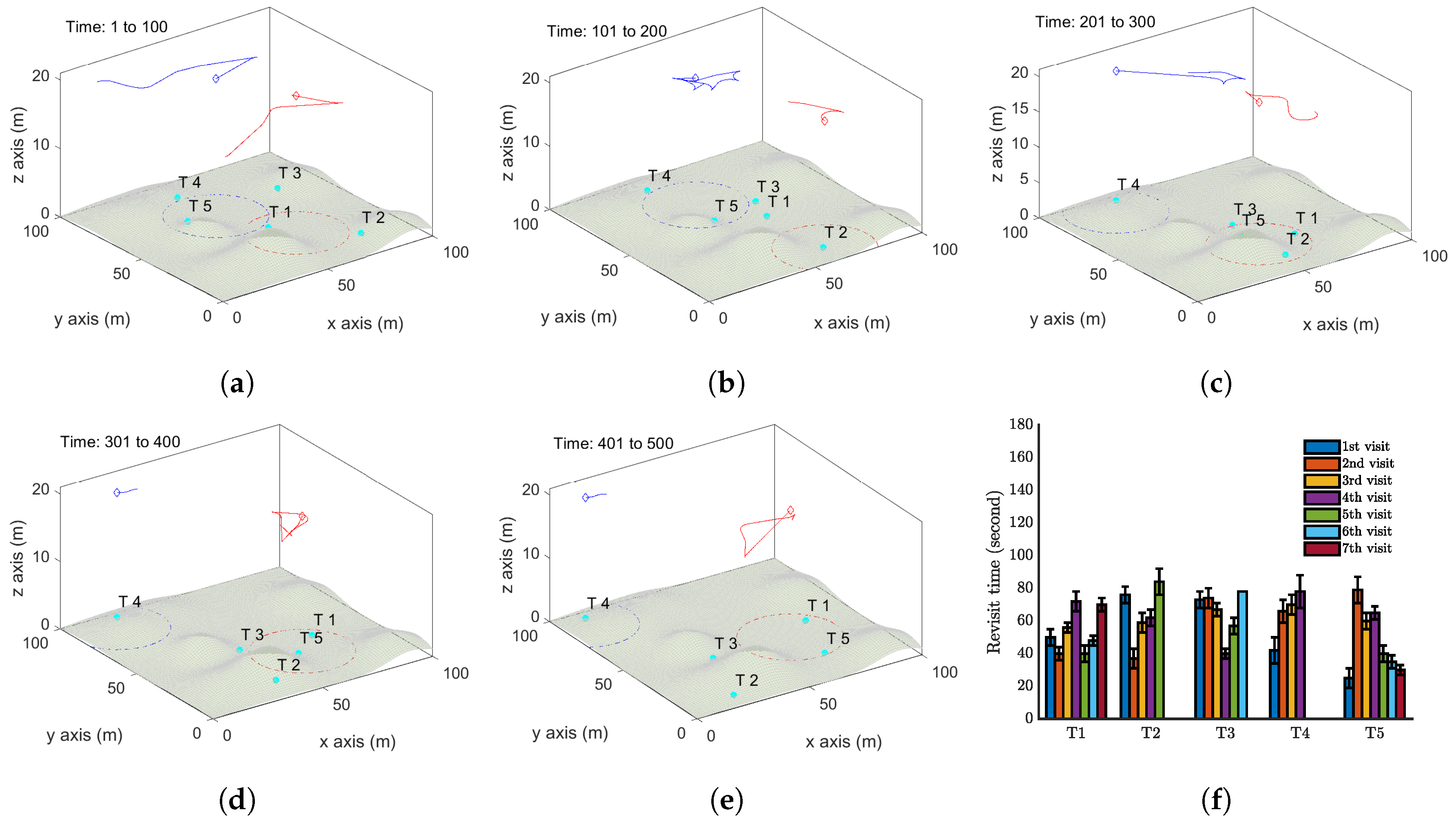
4.5. Extension to Uneven Terrains
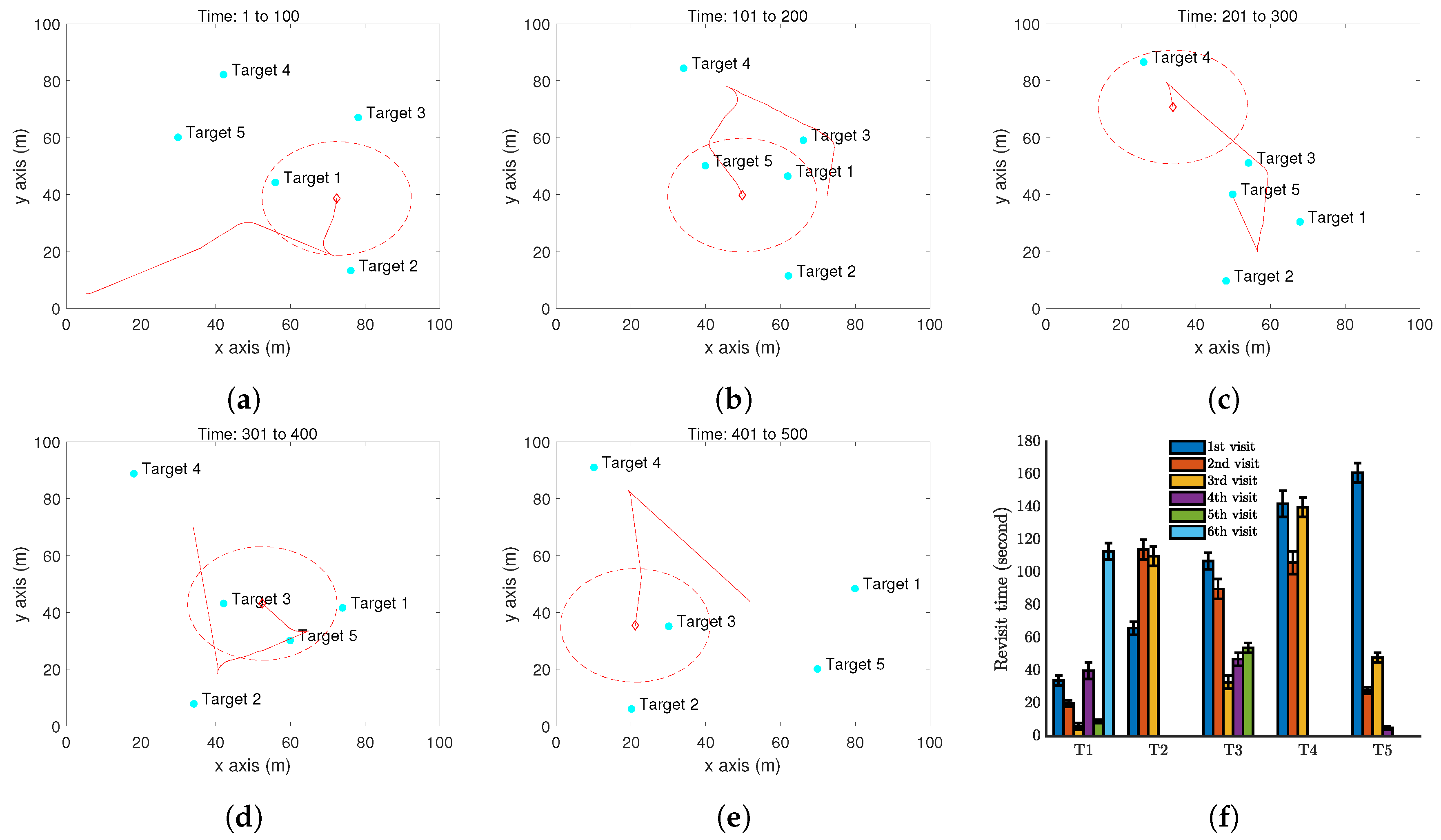
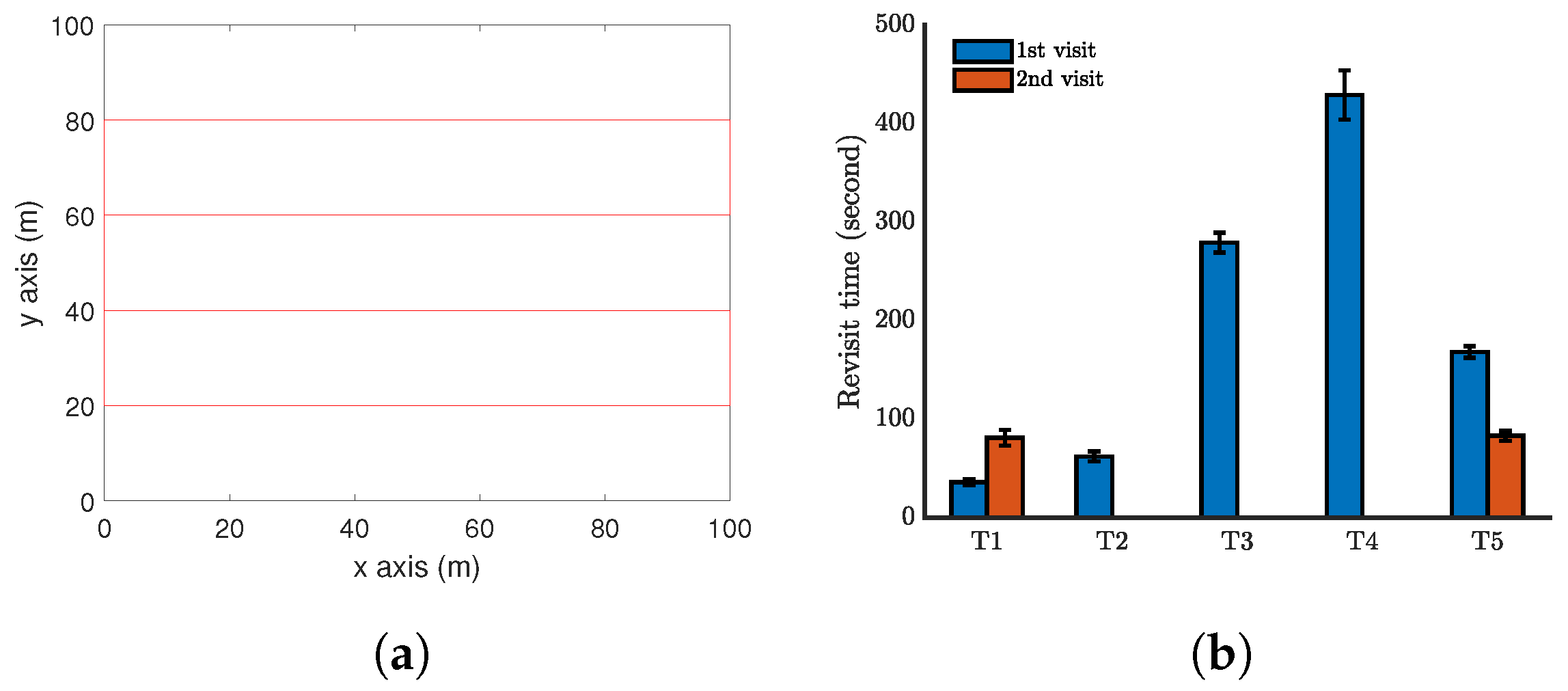
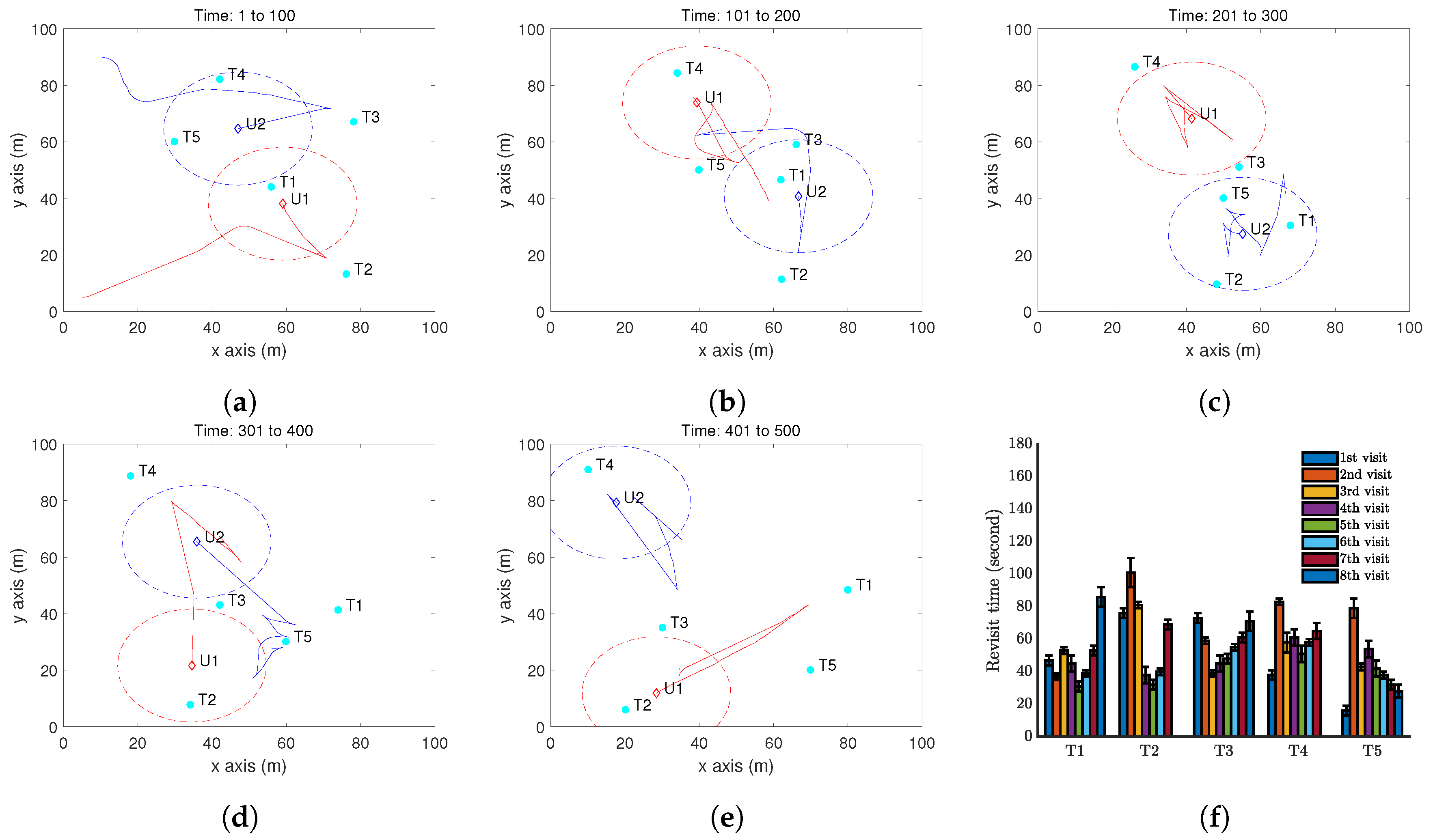
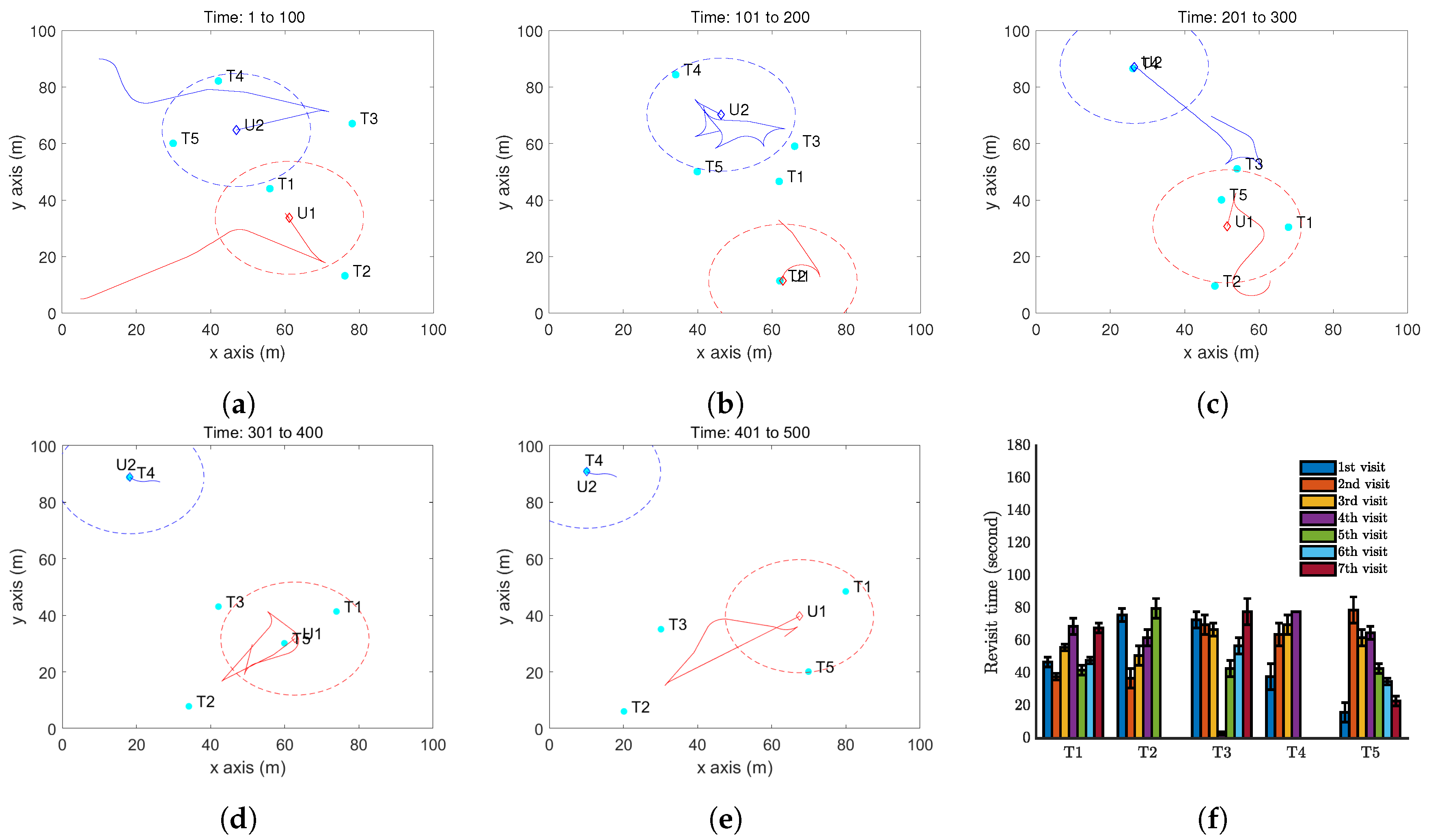
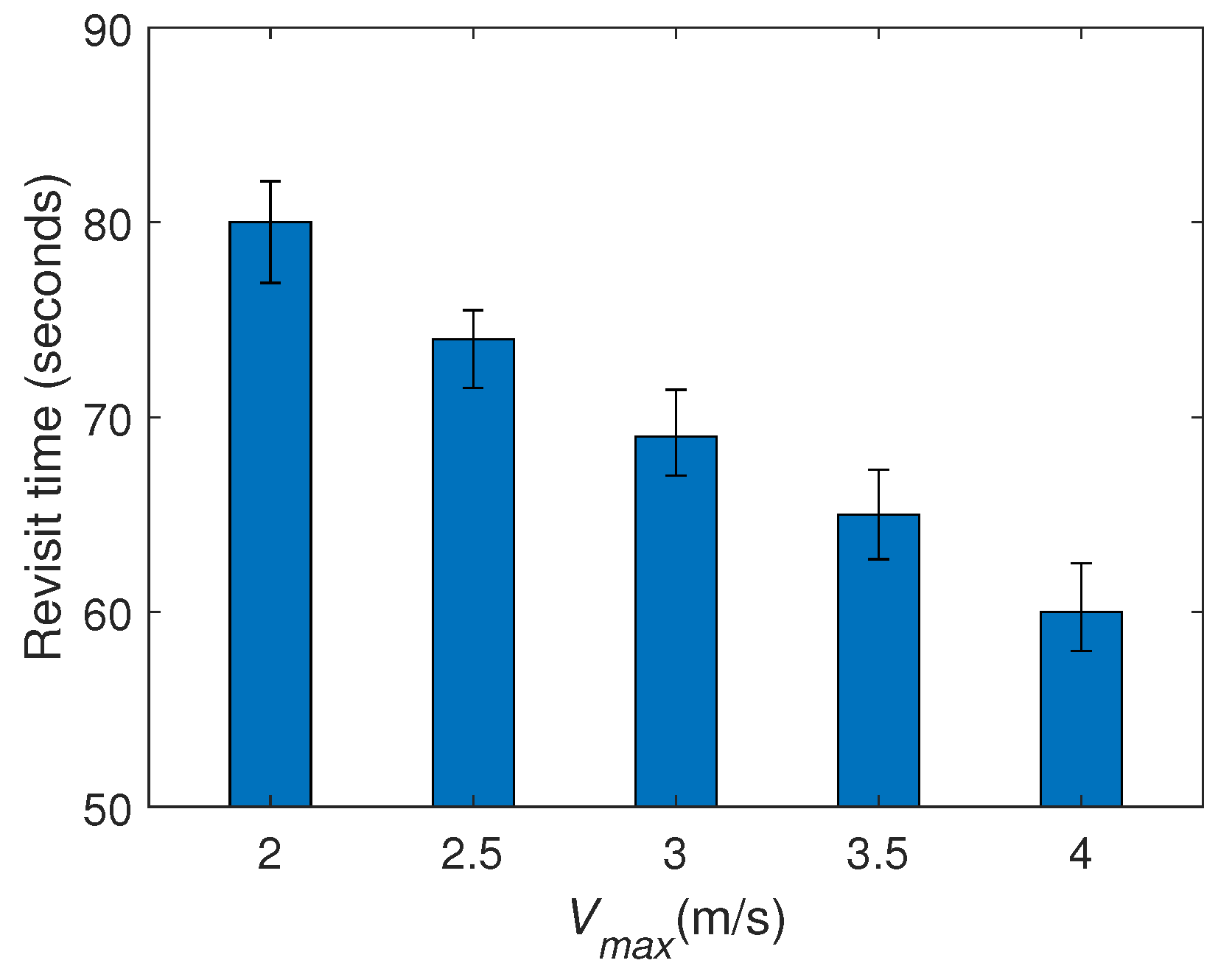
5. Simulations
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Huang, H.; Savkin, A.V. Towards the internet of flying robots: A survey. Sensors 2018, 18, 4038. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. An algorithm of reactive collision free 3-D deployment of networked unmanned aerial vehicles for surveillance and monitoring. IEEE Trans. Ind. Inform. 2020, 16, 132–140. [Google Scholar] [CrossRef]
- Li, X.; Huang, H.; Savkin, A.V. A novel method for protecting swimmers and surfers from shark attacks using communicating autonomous drones. IEEE Internet Things J. 2020. [Google Scholar] [CrossRef]
- Xu, Y.; Zhao, S.; Luo, D.; You, Y. Affine formation maneuver control of high-order multi-agent systems over directed networks. Automatica 2020, 118, 109004. [Google Scholar] [CrossRef]
- Liu, P.; Li, G.; Liu, X.; Xiao, L.; Wang, Y.; Yang, C.; Gui, W. A novel non-uniform control vector parameterization approach with time grid refinement for flight level tracking optimal control problems. ISA Trans. 2018, 73, 66–78. [Google Scholar] [CrossRef] [PubMed]
- Ješke, P.; Klouček, Š.; Saska, M. Autonomous Compact Monitoring of Large Areas Using Micro Aerial Vehicles with Limited Sensory Information and Computational Resources. In International Conference on Modelling and Simulation for Autonomous Systesm; Springer: Cham, Switzerland, 2018; pp. 158–171. [Google Scholar]
- Guastella, D.C.; Cantelli, L.; Longo, D.; Melita, C.D.; Muscato, G. Coverage path planning for a flock of aerial vehicles to support autonomous rovers through traversability analysis. ACTA IMEKO 2019, 8, 9–12. [Google Scholar] [CrossRef]
- Guastella, D.C.; Cantelli, L.; Giammello, G.; Melita, C.D.; Spatino, G.; Muscato, G. Complete coverage path planning for aerial vehicle flocks deployed in outdoor environments. Comput. Electr. Eng. 2019, 75, 189–201. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Navigation of a network of aerial drones for monitoring a frontier of a moving environmental disaster area. IEEE Syst. J. 2020. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Ding, M.; Huang, C. Mobile robots in wireless sensor networks: A survey on tasks. Comput. Netw. 2019, 148, 1–19. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Proactive deployment of aerial drones for coverage over very uneven terrains: A version of the 3D art gallery problem. Sensors 2019, 19, 1438. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Asymptotically optimal deployment of drones for surveillance and monitoring. Sensors 2019, 19, 2068. [Google Scholar] [CrossRef]
- Zhang, L.; Deng, F.; Chen, J.; Bi, Y.; Phang, S.K.; Chen, X.; Chen, B.M. Vision-based target three-dimensional geolocation using unmanned aerial vehicles. IEEE Trans. Ind. Electron. 2018, 65, 8052–8061. [Google Scholar] [CrossRef]
- Wang, L.; Chen, F.; Yin, H. Detecting and tracking vehicles in traffic by unmanned aerial vehicles. Autom. Constr. 2016, 72, 294–308. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Q.; Hu, H.; He, Y. A novel real-time moving target tracking and path planning system for a quadrotor uav in unknown unstructured outdoor scenes. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2362–2372. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, F.; Zhang, B.; Ma, R.; Hao, Q. Development of UAV-based target tracking and recognition systems. IEEE Trans. Intell. Transp. Syst. 2019. [Google Scholar] [CrossRef]
- Wise, R.; Rysdyk, R. UAV coordination for autonomous target tracking. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; p. 6453. [Google Scholar]
- Oh, H.; Turchi, D.; Kim, S.; Tsourdos, A.; Pollini, L.; White, B. Coordinated Standoff Tracking Using Path Shaping for Multiple UAVs. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 348–363. [Google Scholar] [CrossRef]
- Zhang, M.; Liu, H.H. Cooperative tracking a moving target using multiple fixed-wing UAVs. J. Intell. Robot. Syst. 2016, 81, 505–529. [Google Scholar] [CrossRef]
- Tang, H.; Miller-Hooks, E. Solving a generalized traveling salesperson problem with stochastic customers. Comput. Oper. Res. 2007, 34, 1963–1987. [Google Scholar] [CrossRef]
- Dumitrescu, A.; Mitchell, J.S. Approximation algorithms for TSP with neighborhoods in the plane. J. Algorithms 2003, 48, 135–159. [Google Scholar] [CrossRef]
- Toth, P.; Vigo, D. The Vehicle Routing Problem; SIAM: Philadelphia, PA, USA, 2002. [Google Scholar]
- Huang, H.; Savkin, A.V. Reactive 3D deployment of a flying robotic network for surveillance of mobile targets. Comput. Netw. 2019, 161, 172–182. [Google Scholar] [CrossRef]
- Moraes, R.; Freitas, E. Experimental analysis of heuristic solutions for the moving target traveling salesman problem applied to a moving targets monitoring system. Expert Syst. Appl. 2019, 136, 392–409. [Google Scholar] [CrossRef]
- Tang, Z.; Ozguner, U. Motion planning for multitarget surveillance with mobile sensor agents. IEEE Trans. Robot. 2005, 21, 898–908. [Google Scholar] [CrossRef]
- Das, A.; Shirazipourazad, S.; Hay, D.; Sen, A. Tracking of multiple targets using optimal number of UAVs. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 1769–1784. [Google Scholar] [CrossRef]
- Guastella, D.C.; Cavallaro, N.D.; Melita, C.D.; Savasta, M.; Muscato, G. 3D path planning for UAV swarm missions. In Proceedings of the 2018 2nd International Conference on Mechatronics Systems and Control Engineering, Amsterdam, The Netherlands, 21–23 February 2018; pp. 33–37. [Google Scholar]
- Savkin, A.V.; Huang, H. Deployment of unmanned aerial vehicle base stations for optimal quality of coverage. IEEE Wirel. Commun. Lett. 2019, 8, 321–324. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. A method of optimized deployment of charging stations for drone delivery. IEEE Trans. Transp. Electrif. 2020, 6, 510–518. [Google Scholar] [CrossRef]
- Wang, C.; Savkin, A.V.; Garratt, M. A strategy for safe 3D navigation of non-holonomic robots among moving obstacles. Robotica 2018, 36, 275–297. [Google Scholar] [CrossRef]
- Kang, Y.; Hedrick, J.K. Linear tracking for a fixed-wing UAV using nonlinear model predictive control. IEEE Trans. Control Syst. Technol. 2009, 17, 1202–1210. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Optimal aircraft planar navigation in static threat environments. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2413–2426. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H.; Ni, W. Securing UAV communication in the presence of stationary or mobile eavesdroppers via online 3d trajectory planning. IEEE Wirel. Commun. Lett. 2020. [Google Scholar] [CrossRef]
- Nigam, N.; Bieniawski, S.; Kroo, I.; Vian, J. Control of multiple UAVs for persistent surveillance: Algorithm and flight test results. IEEE Trans. Control Syst. Technol. 2011, 20, 1236–1251. [Google Scholar] [CrossRef]
- Savkin, A.V.; Wang, C. A simple biologically inspired algorithm for collision-free navigation of a unicycle-like robot in dynamic environments with moving obstacles. Robotica 2013, 31, 993–1001. [Google Scholar] [CrossRef]
- Hoy, M.; Matveev, A.S.; Savkin, A.V. Algorithms for collision-free navigation of mobile robots in complex cluttered environments: A survey. Robotica 2015, 33, 463–497. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Meaning |
|---|---|
| Position of UAV i at time t | |
| Heading of UAV i at time t | |
| Linear speed of UAV i at time t | |
| Angular velocity of UAV i at time t | |
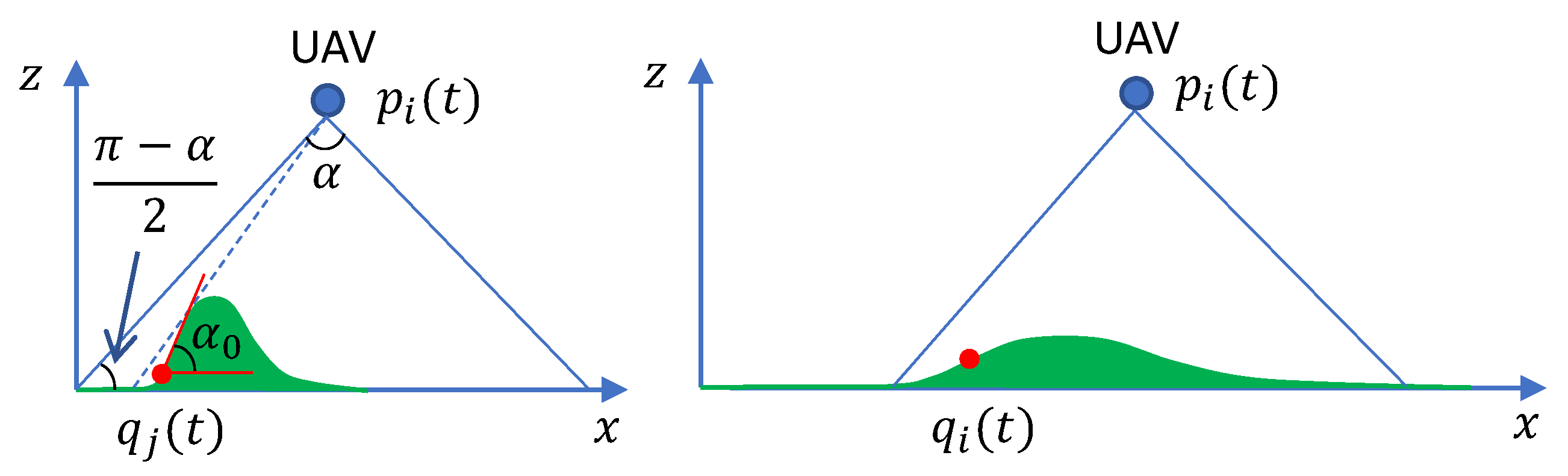
| Observation angle | |
| Z | Flight altitude |
| R | Radius of the vision cone of UAVs |
| Position of target j at time t | |
| Estimated position of target j at time t | |
| Sampling time | |
| Maximum error of the estimated target speed | |
| Revisit time of target j | |
| Uncertainty level of target j at time t | |
| Weighted uncertainty level of target j at time t | |
| Distance between UAV i and target j at time t |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Savkin, A.V.; Li, X. Reactive Autonomous Navigation of UAVs for Dynamic Sensing Coverage of Mobile Ground Targets. Sensors 2020, 20, 3720. https://doi.org/10.3390/s20133720
Huang H, Savkin AV, Li X. Reactive Autonomous Navigation of UAVs for Dynamic Sensing Coverage of Mobile Ground Targets. Sensors. 2020; 20(13):3720. https://doi.org/10.3390/s20133720
Chicago/Turabian StyleHuang, Hailong, Andrey V. Savkin, and Xiaohui Li. 2020. "Reactive Autonomous Navigation of UAVs for Dynamic Sensing Coverage of Mobile Ground Targets" Sensors 20, no. 13: 3720. https://doi.org/10.3390/s20133720
APA StyleHuang, H., Savkin, A. V., & Li, X. (2020). Reactive Autonomous Navigation of UAVs for Dynamic Sensing Coverage of Mobile Ground Targets. Sensors, 20(13), 3720. https://doi.org/10.3390/s20133720