1. Introduction
Despite significant advances made in recent years, highly or fully automated driving of vehicles remains challenging in arbitrarily complex environments, due to numerous non-trivial issues to be addressed, among which is the path tracking control [
1]. The aim of designing the path tracking controller is to ensure that the vehicle follows reference paths accurately and robustly in a timely manner under varying environmental and vehicular conditions on the premise of guaranteed vehicle stability [
2]. In this study, we focus on the lateral control of autonomous vehicles.
Previously proposed path tracking schemes can be classified into 3 categories: (1) Geometric based control, including pure pursuit control [
3,
4], the Stanley Tracking Algorithm [
5], etc., with which the front wheel angle is computed by investigating the geometric relationship among vehicle kinematics, reference paths and points of preview. Due to the neglect of vehicle dynamics in these strategies, both tracking accuracy and vehicle stability would be worsened as the vehicle speed increases. (2) Feedback control without prediction, including backstepping control [
6],
H∞ control [
7], sliding-mode control [
8,
9], adaptive control [
10,
11] and the combination of aforementioned algorithms [
12]. In these strategies, explicit control laws are designed with regard to vehicle dynamics whose key characteristics are captured with mathematically complex models. Although it has been proven by both simulation studies and field tests that these control algorithms are effective in vehicle motion control, their performance under highly dynamic conditions are not satisfactory mainly due to the absence of prediction on future conditions and low tolerance on external disturbances [
13]. (3) Model predictive control (MPC), which is well suited to optimization problems with multiple constraints and is characterized by prediction and optimization, is now increasingly adopted in implementing path tracking control of autonomous vehicles [
14,
15]. A path tracking controller built in the MPC framework employs a vehicle dynamics model to predict vehicle states and establishes a multivariate multi-objective function between the predicted states of the vehicle and the reference variables as an open-loop optimal problem. At each sampling time, a sequence of optimal steering angles is calculated by solving the control problem with multiple constraints, which is applied to the control process only during the following sampling interval. Then, a new optimal control sequence is calculated based on new measurements of the vehicle states over a shifted horizon. The benefit brought by rolling optimization on finite and shifting horizons is that MPC can optimize its control law throughout the process of control and therefore can cope with the dynamically changing characteristics of the controlled system. The linear time-varying (LTV) MPC is more applicable in practice as the basic control strategy due to its much higher computational efficiency as compared to nonlinear MPC (NMPC) [
16].
Full capture of the nonlinearities of the vehicle in the prediction model is neither favorable nor possible when designing MPC controllers due to the enormously large computation overhead [
17]. As a result, extensive efforts have been invested in proposing linearized models that can contribute to achieving a tradeoff between tracking accuracy and computation efficiency. Among these proposals, the proportional linearized tire model with the small-angle assumption is one that gets widely adopted in previously proposed MPC-based controllers [
18,
19,
20]. However, it is not necessarily true to assume that the slip angle will stay small, especially when the vehicle speed is high and the road friction coefficient is low. Significant modeling error could be caused if the linearized tire model is used without imposing constraints on the slip angle as the lateral tire forces will be saturated and no longer increase linearly with the slip angle when the lateral vehicle dynamics enter the nonlinear zone. As a result, the predicted states of the vehicle would deviate from actual values and therefore affect control accuracy [
21]. Although adopting a nonlinear tire model contributes to minimizing the modeling error, it is still important for the slip angle to be contained within a small interval. In the framework of LTV-MPC, the nonlinear prediction model is linearized at each control point of operation. As a result, even with a nonlinear tire model, significant modeling errors would still be caused when the control points of operation approach the nonlinear zone of tire dynamics. Therefore, a constraint on the slip angle is required.
To develop a path tracking controller that is robust to dynamic changes in working conditions and yet still benefits from the low computation burden with LTV-MPC, a nonlinear tire model with a constraint imposed on the slip angle is incorporated into the prediction model in this study.
To cope with arbitrarily complex driving conditions, a few proposals have also focused on dynamic control parameters including optimal sampling time [
22,
23] or adaptive weights of the cost function [
15]. In [
24], the authors point out the necessity of changing both the prediction horizon and control horizon as speed changes to maintain vehicle stability. Though, there is still limited research on fine-tuning the prediction horizon and control horizon other than setting these two parameters empirically or via trial-and-error [
25,
26]. This study proposes to optimize both parameters with regard to various vehicle speeds and road adhesion coefficients using the particle swarm optimization (PSO) algorithm.
Another major gap between previously proposed path tracking controllers and practical lateral control of autonomous vehicles is the absence of a precise model that depicts the nonlinear characteristics of the steering system. The consequences are two-fold.
First, the feedback of the actual steering angle is almost certainly distorted as the nonlinearities of the steering system are either completely neglected or overly simplified [
27]. Some efforts have been made to approximate the steering system with linear representations. In [
28], the steering system is identified with the prediction-error minimization (PEM) method, and a second-order system is established as the transfer function between the actual steering angle and the target. Han at al. [
10] designed a second-order steering control model with the control auto-regression and moving-average (CARMA) method, and the parameters of the steering system are estimated with the method of forgetting factor recursive least squares (FFRLS). Though, the linear approximation of the rather complex nonlinear time-varying steering systems is deemed to be non-applicable for practical purposes. Besides, identifying system parameters under different steering conditions is quite tedious.
Second, as the steering angle is not a physical signal applicable to any type of steering actuators, it becomes impossible to verify the effectiveness of proposed controlling strategies via field tests.
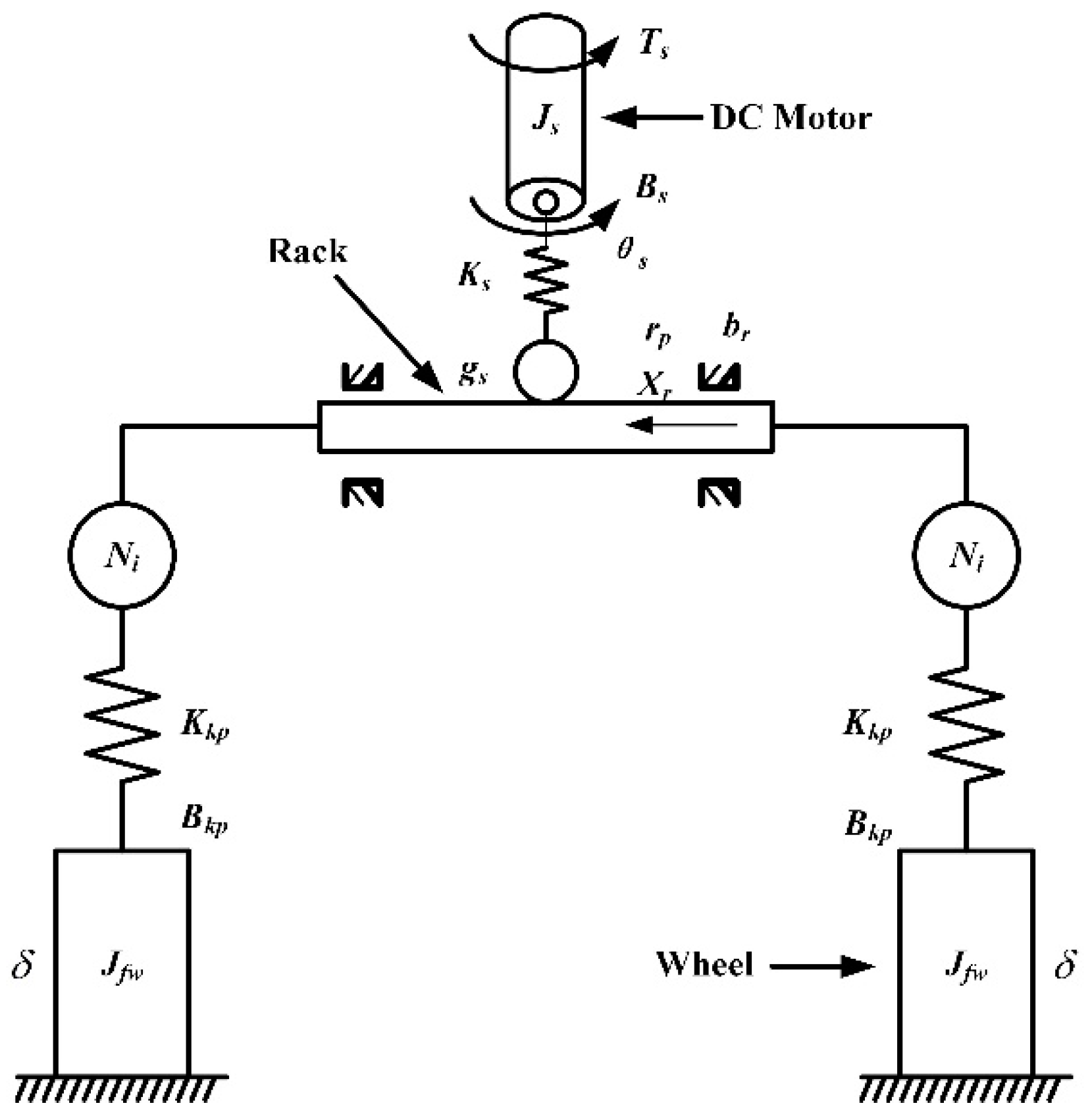
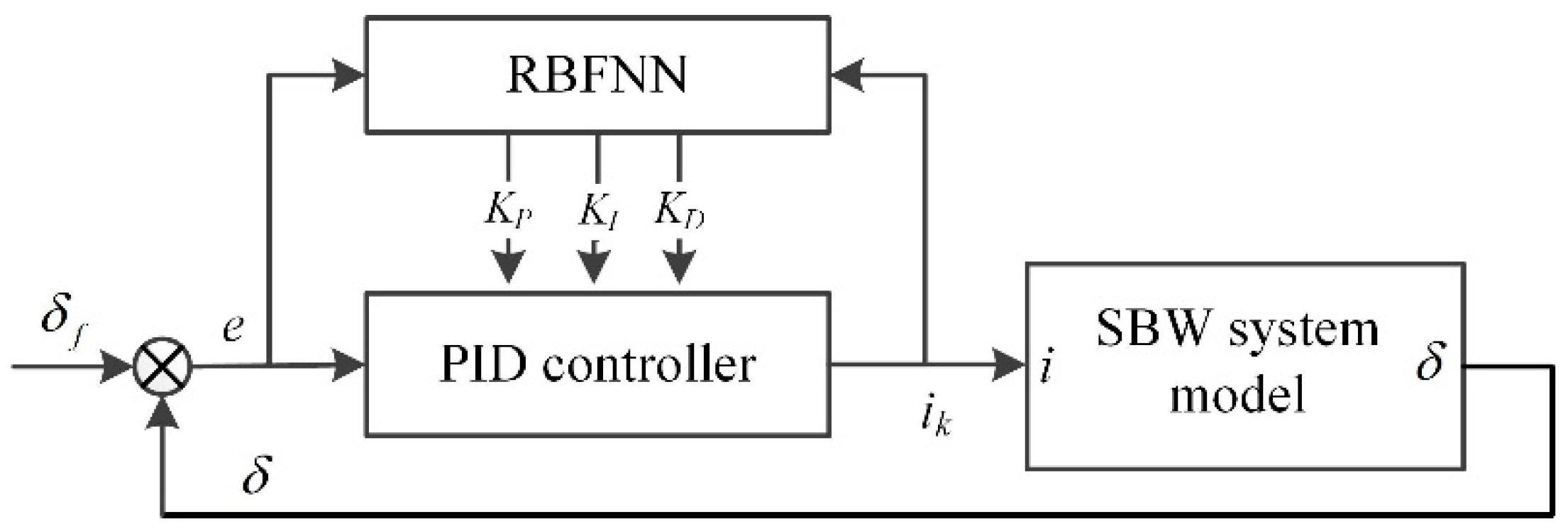
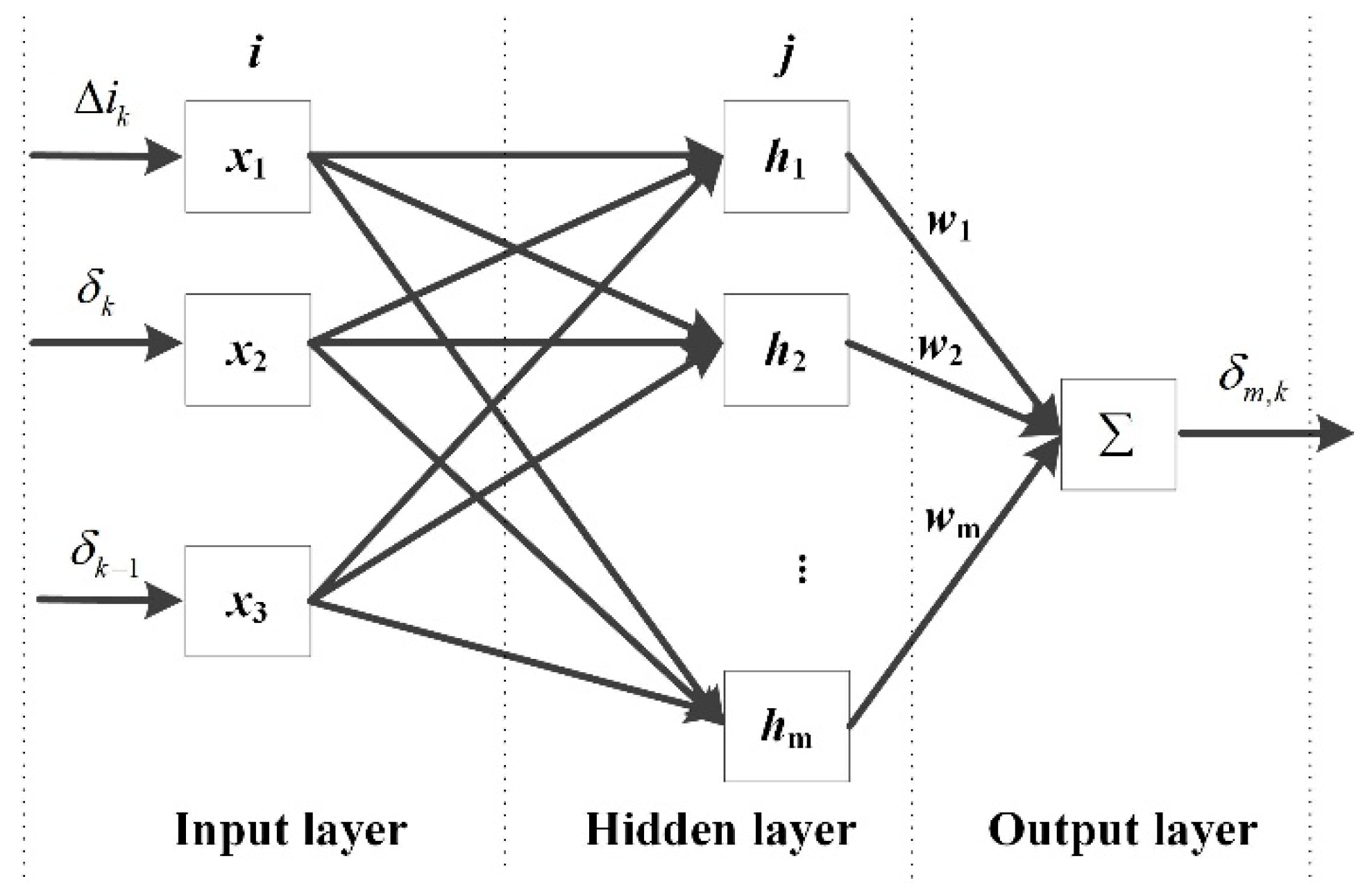
Therefore, an efficient and robust control strategy developed based on an accurate steering system model, that outputs executable control signals such as electric current by actuators is an important step toward developing path tracking controllers for real-life autonomous driving. To identify the nonlinear characteristics of the controlled system online and adjust the control parameters adaptively, adaptive PID control strategies based on neural networks have been developed [
10]. Li at al. [
29] proposed a back propagation neural network (BPNN)-PID control strategy to eliminate the nonlinear friction in the electric power steering system. In our case, a RBFNN, which converges faster as compared to BPNN, is adopted.
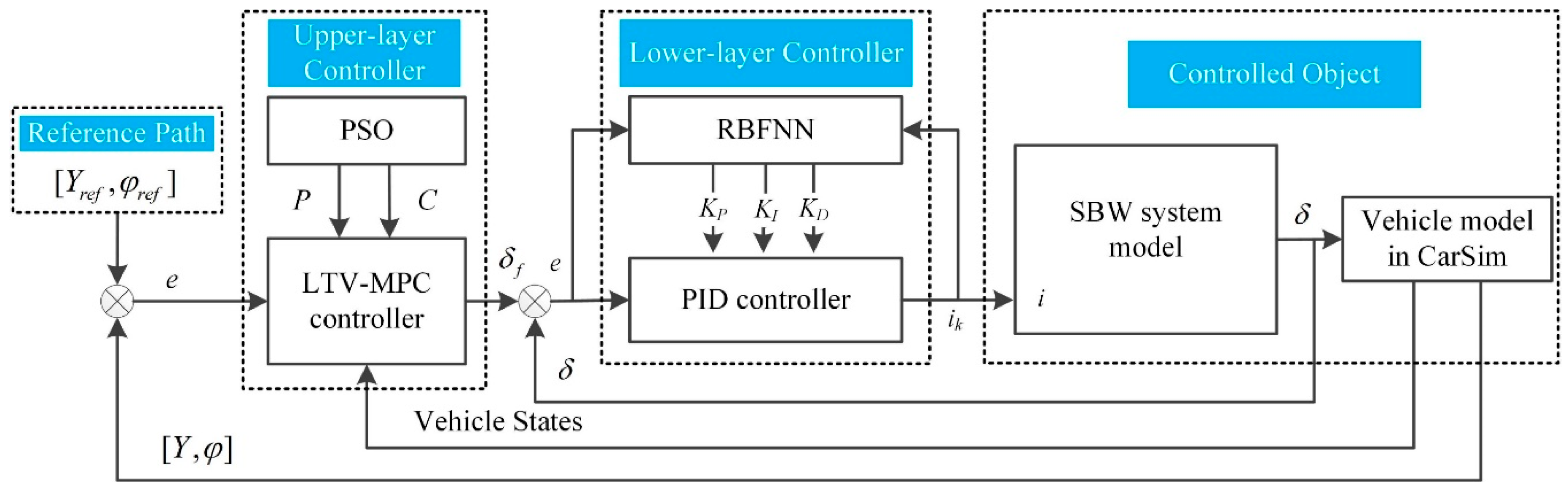
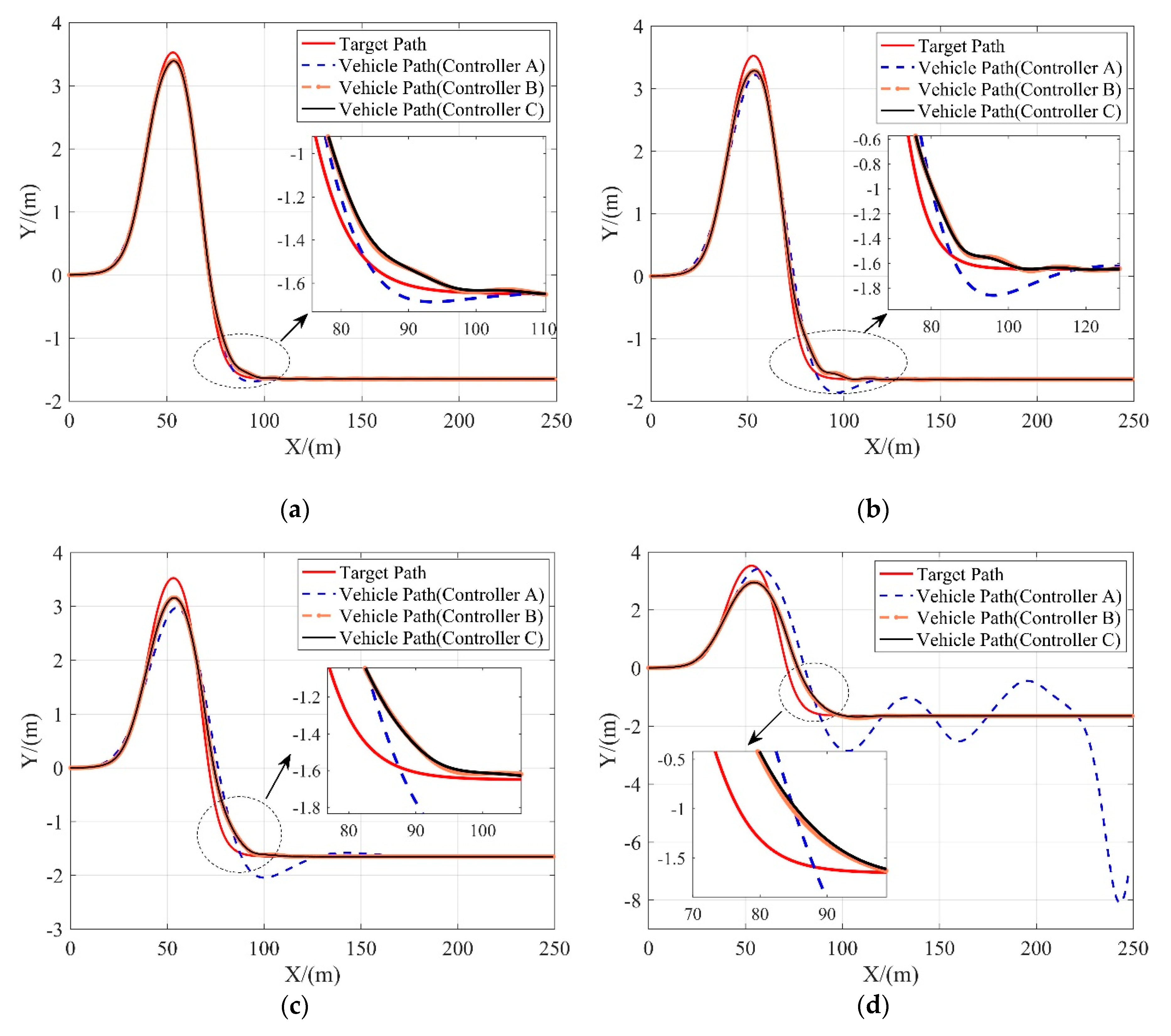
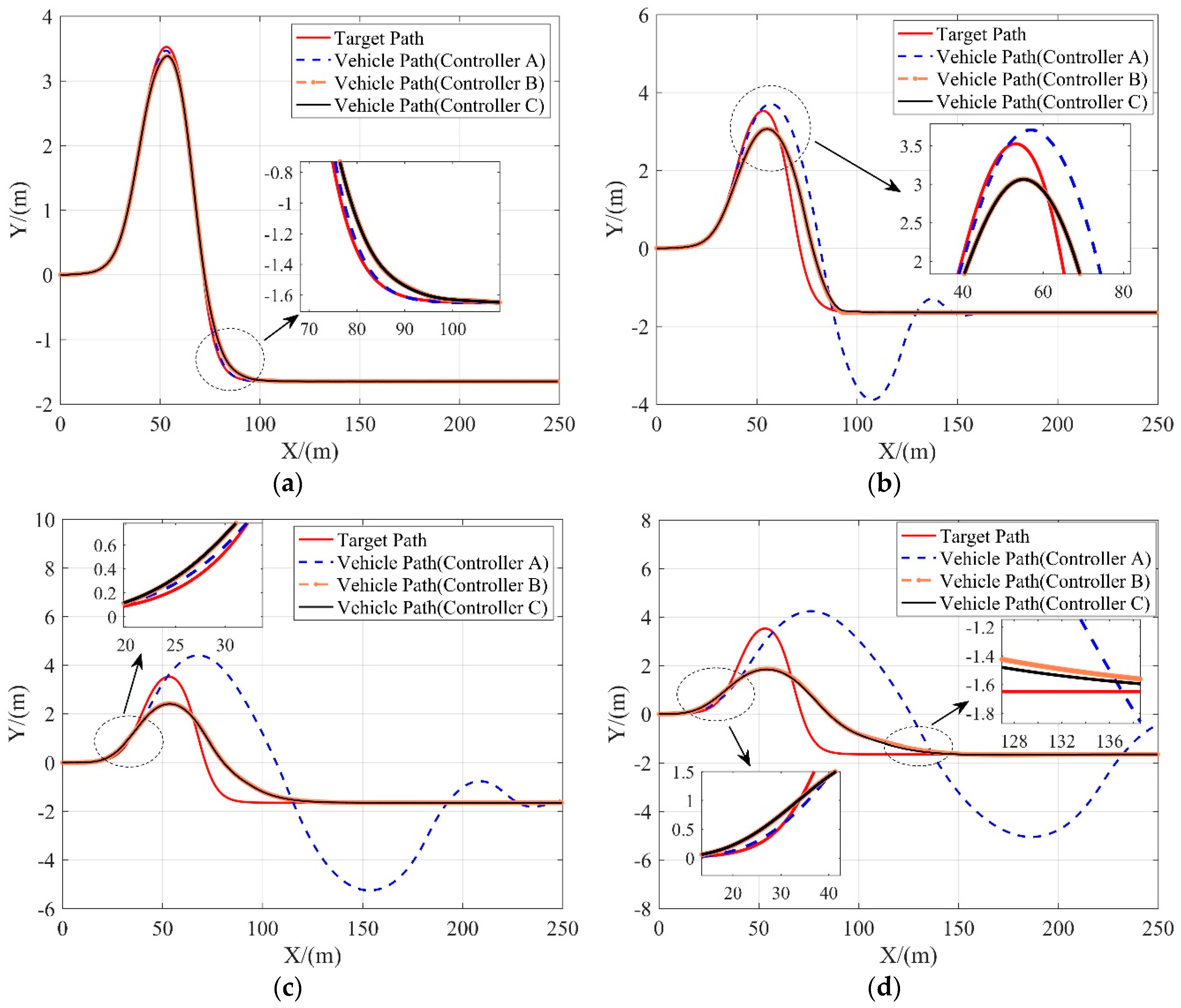
This paper proposes a two-layer path tracking controller for lateral control of autonomous vehicles. The upper layer is a PSO-LTV-MPC controller built upon a 3-DOF vehicle dynamics model. With the root mean square (RMS) value of tracking deviation as the objective function, the combination of the prediction and the control horizon of the LTV-MPC algorithm under different working conditions in terms of vehicle velocities and road adhesion coefficients are optimized offline with PSO. To ensure vehicle stability while tracking reference paths, a slip angle constraint is introduced to prevent tire forces from saturation. The lower layer is a RBFNN-PID steering angle tracking controller that generates electric current control signals for the steering motor. The nonlinear characteristics of the steering system are identified on-line with the RBFNN, and the PID controller’s control parameters are adjusted adaptively. The proposed hierarchical controller is validated on the CarSim-Matlab/Simulink simulation platform under double lane-changing conditions with various velocities and road adhesion coefficients. The effectiveness of the proposed strategy is verified through extensive simulation tests.
3. Vehicle Dynamics Model
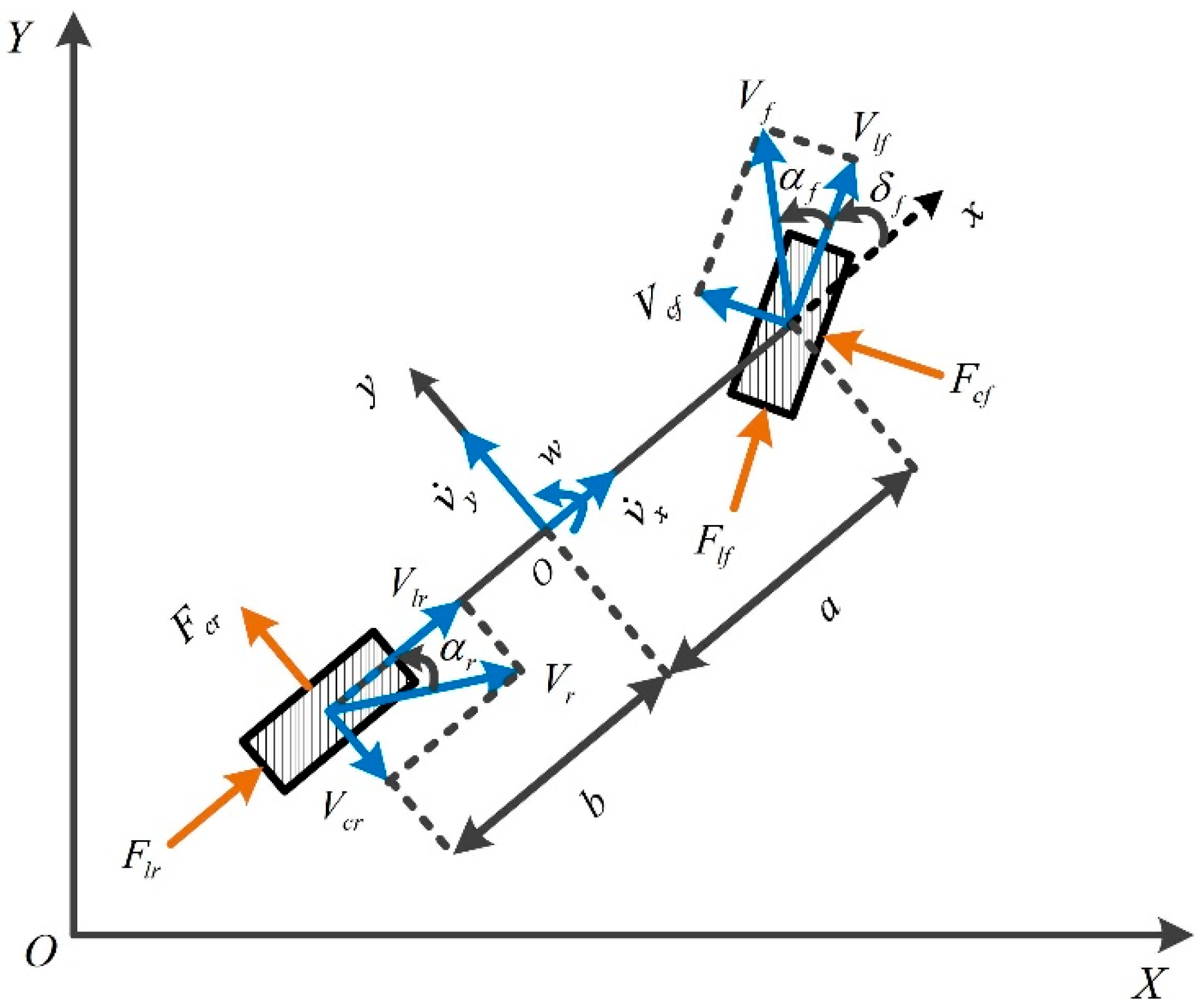
This study adopts the “bicycle model” which has been widely used to develop the prediction model of MPC [
30], as shown in
Figure 2. The definitions of the parameters are listed in
Table 1.
With Newton’s Second Law applied, a vehicle dynamics model can be built as given in Equation (1):
where
vy and
vx represent the vehicle longitudinal speed, and lateral speed in the body-fixed coordinate system respectively.
Y is the vehicle lateral position in the Cartesian coordinate system.
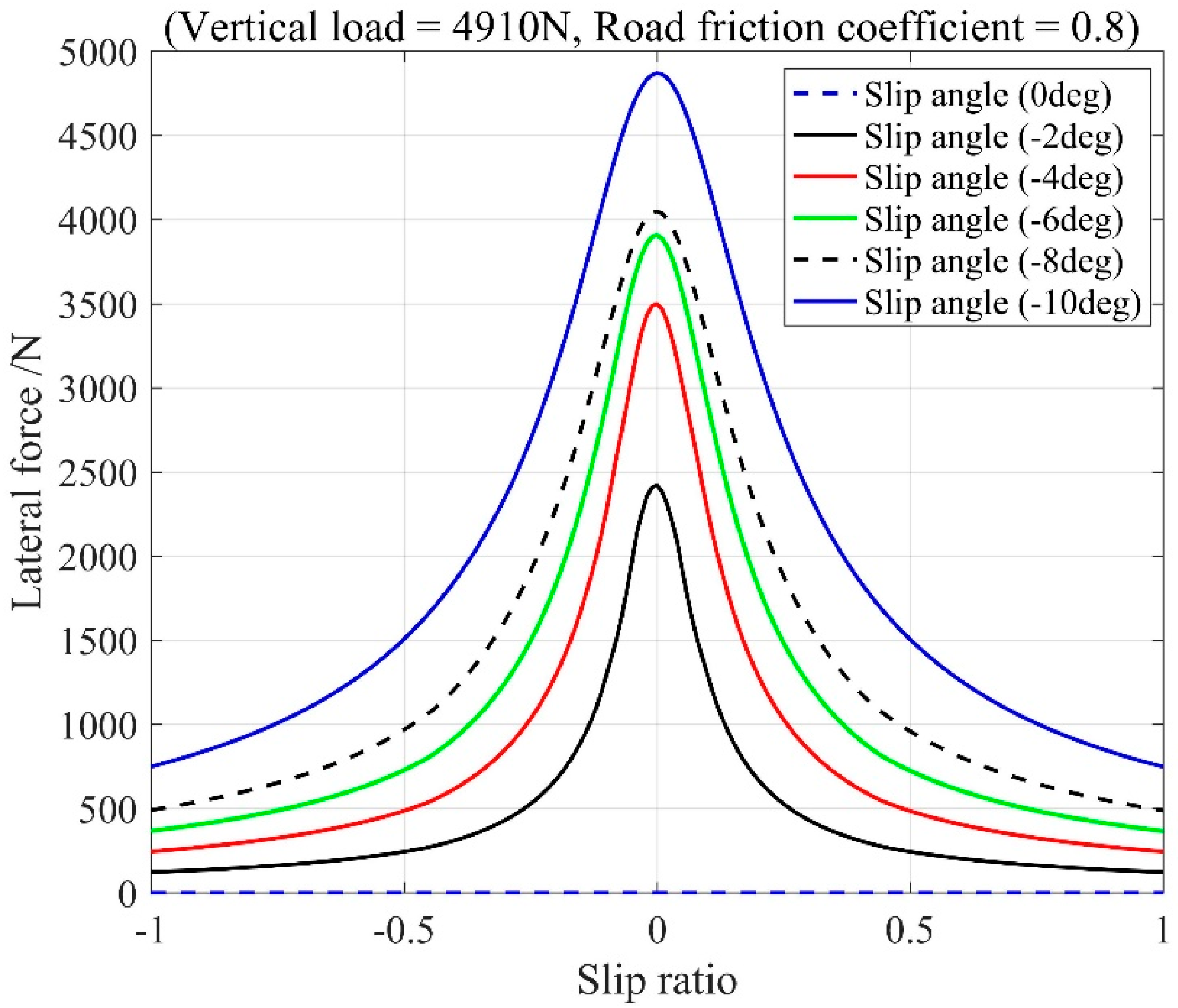
To compute the longitudinal forces and lateral forces of the front and rear wheels with tire dynamics coupling considered, a semi-empirical nonlinear model, the Pacejka tire model, is adopted. As given in Equation (2), the tire longitudinal and lateral forces are described as nonlinear functions of their respective parameters: the slip angle α and the longitudinal slip ratio κ with the effect of vertical load
Fz, and the road friction coefficient
μ.
Figure 3 shows an example of the tire lateral forces versus longitudinal slip and slip angle, for the fixed values of
μ.
We assume that the vehicle is equipped with an antilock brake system, and the tire longitudinal slip ratio
κf and
κr is therefore provided. As suggested in [
22], if the slip angle is relatively small, it can be estimated with the vehicle longitudinal speed
vy, the lateral speed
vx, the Yaw rate
w, and the front wheel steering angle
δf, as given in Equations (3) and (4):
and the vertical load of the front and the rear wheels are defined as follows:
The nonlinear vehicle dynamics model described in Equations (1)–(5) can be rewritten in a compact form as defined below:
where
ξ is the state vector and
ξ = [
vy,w,
φ,
Y]
T.
As we focus on the lateral control of the autonomous vehicle in this study, the longitudinal speed
vx is set to be constant. For parameters in
ξ, the yaw rate
w, the heading angle
φ, and the vehicle lateral position in Cartesian coordinate system
Y can be measured with the yaw rate sensor and GPS/inertial measurement unit (IMU). Measuring the lateral velocity
vy is more challenging both economically and technically. Instead, previous studies have proposed to estimate the vehicle sideslip angle, based on which
vy can be calculated with
vx being a known constant, utilizing vehicle dynamics models and observation techniques based on easily measurable parameters. Measurements from the differential GPS receiver and the IMU are fused with a Kalman filter to calculate the position, the orientation, and the longitudinal and lateral velocities of the vehicle [
24,
26]. For more adaptive and accurate estimation of the vehicle sideslip angle, measurable parameters such as the wheel angular velocity, yaw rate, and wheel angle are used [
31,
32,
33,
34]. Therefore, we draw the conclusion that all the parameters of vehicle states in
ξ can be either directly measured or estimated from measurable parameters.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}