1. Introduction
Knowledge of the relationships between behaviour and health, welfare and performance indicators can be used to assess overall welfare in production animals. Broiler chickens are an example of a livestock species for which insight into these relationships can be valuable. Broilers are, however, often kept in intensive systems, where large numbers of birds (~75,000 per farm in The Netherlands on average; [
1]) are housed. This makes it difficult and time consuming to observe the animals and to measure the health, welfare and performance of individual birds. The use of a proxy could potentially help improve the ease with which the health, welfare and performance of the animals can be assessed. A promising trait that could serve as a proxy for multiple indicators of health, welfare and performance is locomotor activity, given the relationship between (changes in) activity and, for example, disease [
2], gait problems [
3], or body weight [
4].
Specifically, information at the individual level is desired to obtain a good view of an individual’s state. Furthermore, when individual data can be collected in a group setting with pen mates present, a more realistic image of an animal’s performance in a production environment can be obtained. In particular, data on individual activity levels of young broilers could be very valuable. For example, it has been established that the activity level of broilers from a fast-growing stock early in life positively correlates with activity later in life [
5]. Furthermore, it has been reported that increased activity can result in fewer leg problems [
6,
7]. Moreover, it has been suggested that increased activity, specifically at an early stage in the growing period, may reduce leg disorders, as leg bone development might be mostly affected in the first days of life (reviewed in [
8,
9]). Overall, activity levels in the first days of life are potentially very informative for the health, welfare and production of animals later in life and therefore an activity tracking system that allows tracking of individual broilers from the first day of life is desired.
Given that broilers are generally housed in large groups in production systems, identification and activity tracking of individual broilers is a challenge. Sensor technologies, such as computer vision (CV), ultra-wideband (UWB) tracking and passive radio frequency identification (RFID) may offer solutions (see [
10] for a review of the applicability of sensor technologies for poultry). In particular, passive RFID seems to have potential for tracking individual broilers from the first day of life, as passive RFID tags do not require batteries and can therefore be small and lightweight [
11]. Therefore, in the current study, the suitability of a passive RFID system for tracking individual broiler activity throughout life was investigated.
The implementation of a passive RFID system for tracking individual broiler activity can have added value in comparison to existing tracking systems. For example, several studies on automated activity recording of broilers and its relationship with different health, welfare and performance traits have been performed (e.g., [
12]), but many of these studies focused on group-level patterns. For example, Van Hertem et al. (2018) implemented a camera-based automatic animal behaviour monitoring tool (eYeNamic
TM, Fancom BV, The Netherlands) to study flock activity [
3]. They reported a linear trend between flock activity and the average gait score of the flock, where a lower activity level was linked to a worse gait in the flock. Another study, using optical flow patterns, reported, among other things, that a lower average level of flock movement was related to a higher mortality percentage in the flock and that skewness and kurtosis of flock movement were correlated with the percentage of birds in the flock having hock burns [
13]. Although such automated flock-level monitoring can be a useful tool for monitoring the overall welfare of a flock, it does not provide information at the individual level and may hereby overlook animals that deviate, which, for example, remain more active than the flock mates and do not show gait problems. Therefore, an automated passive RFID tracking system that provides information on activity levels of individual broilers can have added value. Furthermore, passive RFID has more potential for tracking young broilers in comparison to some other tracking technologies. For example, in our previous study [
14], the suitability of an UWB system for tracking individual levels of activity in group-housed broilers was determined. This system was concluded to be suitable for tracking broiler activity, with, among other things, a correlation of 0.71 between video and UWB recorded distances, but it has to be noted that the UWB tags were quite large and heavy, rendering tracking of young broilers, i.e., of less than two weeks old, not feasible [
14]. Given the small and lightweight tags of passive RFID systems, passive RFID does have potential for studying birds younger than two weeks old. Passive RFID has already been used for poultry—for example, to study range use, nest box use and feeding behaviour (e.g., [
15,
16,
17]; reviewed in [
10]). Passive RFID has also been used to study general locomotor activity [
18]. In a study by Kjaer (2017), RFID antennas were placed inside the central area of the pen of the birds in order to record the locomotor activity of laying hens [
18]. These antennas covered an area equal to 33% of the total pen area. Possibly, a more detailed image of activity can be obtained using more antennas, covering a larger percentage of the pen.
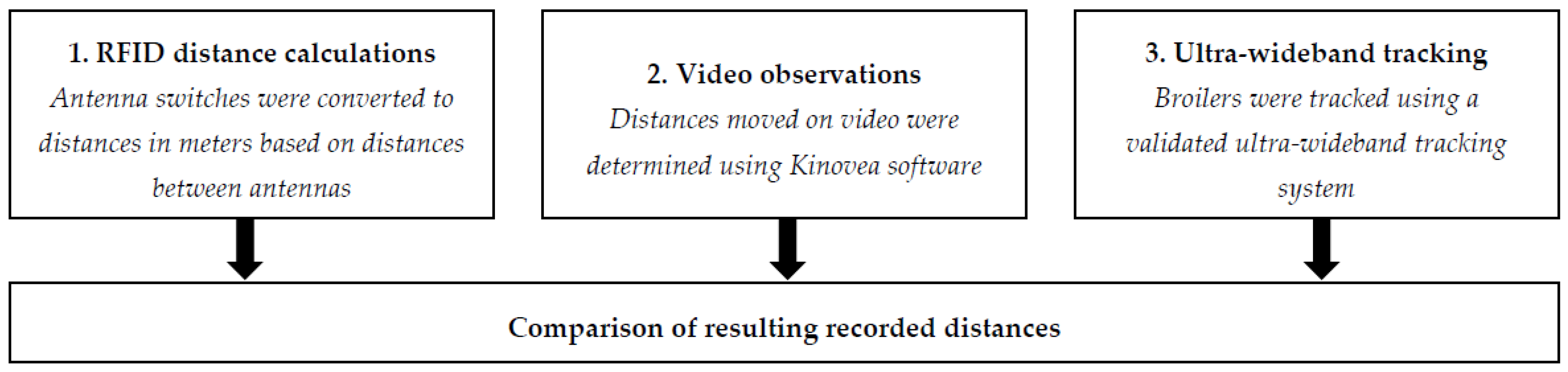
In this study, the suitability of a passive RFID system, covering the full pen, for tracking individual broiler activity throughout life was investigated. The two main objectives of this study were (1) to validate the RFID recorded locations by comparing these to the locations recorded on video, and (2) to assess whether the moving distances calculated from the RFID data, using the recorded antenna positions over time and the distances between antennas, could serve as a measure of activity. To this end, the RFID recorded distances were compared to the total distance moved as recorded on video and using a validated UWB tracking system.
4. Discussion
In this research, it was studied whether a passive high frequency RFID tracking system was suitable for monitoring the individual levels of activity of broilers throughout life. On average, 62.5% of the RFID recordings matched exactly with video in terms of the location of the animals and 99.2% of the registrations matched when allowing for a deviation of one antenna, indicating that the RFID system can give a good approximation of the location of individual birds. Furthermore, distances recorded with the RFID system correlated well with both video and UWB measurements. These correlations indicate that the RFID system can provide good estimations of the activity levels of individual broilers in relation to their pen mates.
4.1. Study A: RFID Location Validation
Overall, almost two-thirds of the location registrations exactly matched between RFID and video. Furthermore, the difference in position detected with the RFID system and on video was rarely larger than one antenna, i.e., birds were rarely registered further away than an adjacent antenna compared to the position on video, as indicated by the 99.2% near matches. This indicates that the RFID system can give a good approximation of the location of individual birds and has potential to be implemented to, for example, study locational patterns of individual birds over time. However, there was some disagreement between video and RFID in terms of exact registered locations, which has several possible explanations that are related to how RFID and video differ in the way they can be used to detect the birds. These include the reference point used for location determination, the level of detail of the recordings, the effect of intermittent tag registrations, and the tag orientation, and are outlined below.
4.1.1. Reference Point for Location Determination
On video the centre point of the birds is used to determine the location of the bird, while the RFID tag is attached to a single leg. This could result in a bird being registered at a different antenna on video than with the RFID system, as the centre point of a bird might be situated at a different antenna than the leg of the bird. It has been reported that broilers generally place their feet in a lateral position relative to the hip [
30]. In particular, when birds are larger, this may affect the results of the position recordings on video and using RFID. A positive relationship between body weight and pelvis width, measured across the back of a standing chicken as the distance between the exterior of the thighs, has been observed in chickens [
31]. Therefore, the absolute distance between the centre point of the birds and their legs may increase further as the birds grow, which could explain why more mismatches were seen in video 3 and 4, in which the birds were larger. However, it must also be noted that video 3 and 4 included birds with UWB tags, while video 1 and 2 did not. With the current data, it cannot be completely ruled out that the UWB tags affected the RFID recordings, but given that the two systems communicate on different radio frequencies, this is not expected. It is therefore hypothesised that the difference in size of the birds was the main cause of the higher number of mismatches in video 3 and 4 and likely, if on video the leg of the bird that was fitted with an RFID tag was annotated, fewer mismatches between RFID and video would be observed. However, with the current setup using top-view video recordings, it was not feasible to annotate single legs of birds as these were not always visible. Therefore, the centre point of the birds was used as an approximation, likely resulting in an increase in mismatches between RFID and video.
4.1.2. Level of Detail of the Recordings
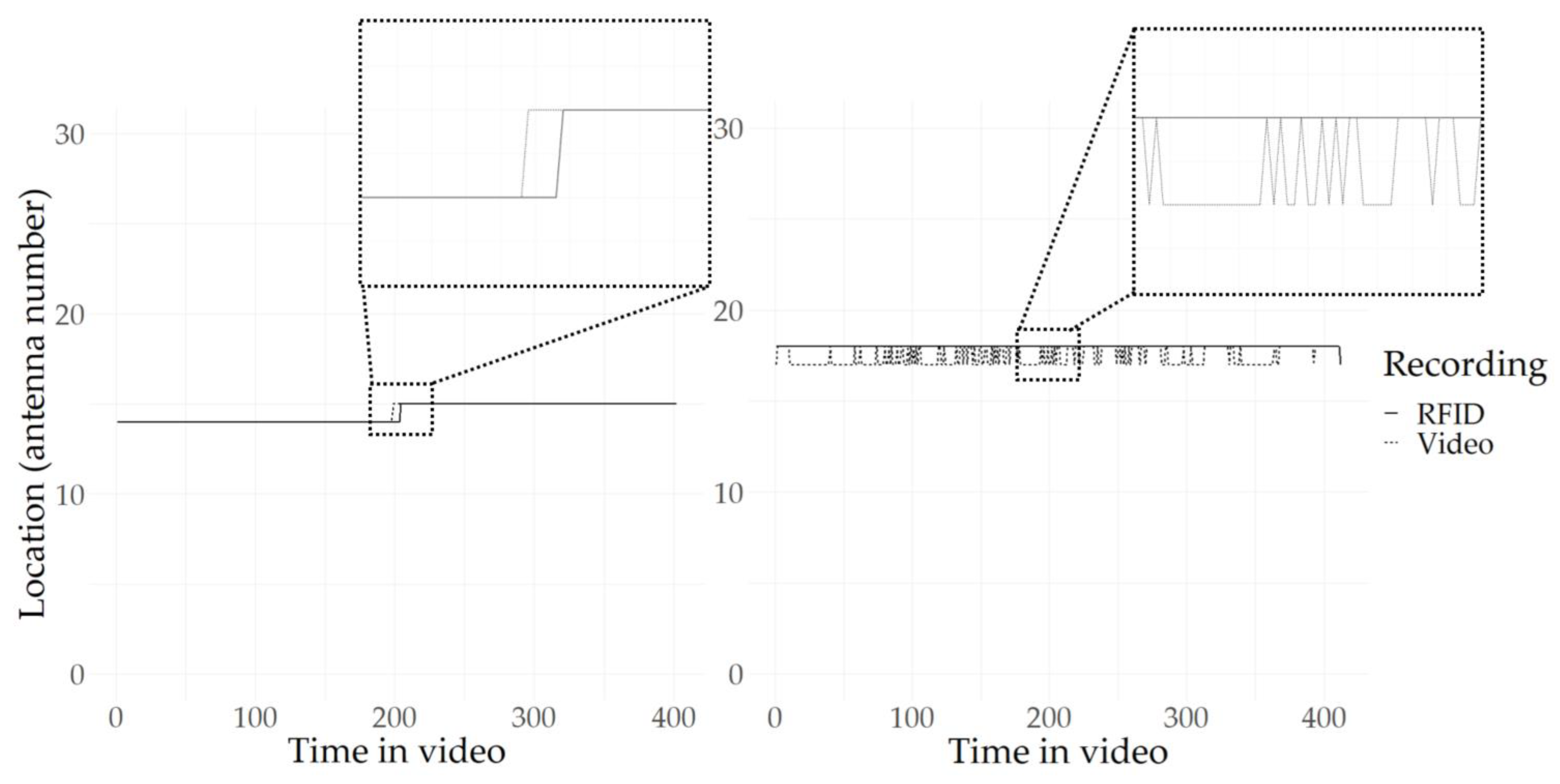
As was shown in
Figure 7b, there were more location switches registered on video, compared to with the RFID tracking. One possible explanation for this higher number of switches on video is that the video recorded more detailed changes than the RFID system. For example, when a bird was situated on the edge between two antennas, even a slight shift of a few pixels could result in the bird being registered at a different antenna than before. This shift might be registered on video due to a slight movement of the birds, but can also be caused by an inaccuracy in the annotations of the birds. Moreover, at the very edges of the antenna panels, there was not always full antenna coverage, as there was some uncovered space between the individual antennas. Therefore, when the video registered a bird at the edge of a new antenna, the RFID system was not always able to ‘see’ this bird and did not register a new location for this bird.
4.1.3. Intermittent Tag Registrations
In some cases, the RFID system did see the tag when it was situated between two antennas. This could result in the bird being registered in two positions intermittently, while the bird was not moving on video, resulting in approximately half of the registrations being a mismatch. In the distance validation, this was filtered out in order to exclude false positives for locomotor movement between antennas, but in the location analysis these switches were kept to allow a full second-by-second comparison of the positions of the animals using the raw RFID data as a basis. Such intermittent registrations at two antennas were observed in the current study and have also been reported in other studies using RFID technology to track positions of animals (e.g., low frequency RFID in rats [
32]; ultra-high frequency RFID in mice [
33]).
4.1.4. Tag Orientation
The RFID system sometimes could not register birds when they were lying down. The RFID system functions best when the tags are in a vertical position, i.e., at a 90 degree angle in relation to the antenna floor. This is often the case when birds stand upright. When birds are lying down, the tags are in a position parallel to the antenna floor. Therefore, when a bird shifts position without fully rising to stand, the RFID system may not register this movement. In the analysis performed here, missing RFID registrations were completed using the last recorded position of the animal, because no ‘new’ information was available from the RFID system and therefore the last registered antenna was the most likely current position of the animal. However, this position may potentially no longer have been the correct one, for the reason mentioned above. For practice, the notion that birds are often not registered when lying down is not a cause for concern. On the contrary, when one is interested in recording locomotor activity, it might even be preferable to not register movement of birds that are not standing up, as this may not be considered as true locomotor movement of the bird. By not registering birds while they are lying down, likely no relevant information is lost and it might reduce noise in the data that could be caused by birds slightly shifting position, for example, because they are preening, while lying down.
Altogether, the differences in the way RFID and video register the birds may underlie the mismatches that are observed. However, the trajectory plots (
Figure 6) show that when RFID and video do not agree on the trajectory, the deviation is generally not larger than one antenna. In other words, birds were, at least in these videos, never registered in locations where they really could not be located near, i.e., at far-away antennas in relation to the position on video. It appears that the RFID system might not always register all changes that are happening on video, because these changes might be too subtle for the RFID system to detect or are not actually caused by birds walking. However, the RFID system also does not register birds in locations where they are not located near based on the video observations. Overall, it appears that the RFID system is not very sensitive to small changes, but does provide a good approximation of the location of birds over time.
4.2. Study B: Moving Distance Validation
4.2.1. RFID Versus Video
In this study, it was assumed that the distance moved as recorded from video is the true distance moved by the animals. There was a moderately strong rank correlation (0.82) between video and RFID in terms of distance moved. This indicates that the RFID system is suitable for comparison of activity levels between animals, and can be implemented to study individual differences in activity levels in a more time-efficient and objective manner compared to visual observations from video recordings. In terms of absolute distances moved, the distance as recorded from video was generally somewhat higher than the distance registered by the RFID system. There are several explanations for this finding.
First, the RFID and video recordings could differ in the exact starting point of the distance recording. In theory, the RFID and video recordings spanned the same time period, but, as explained earlier, the RFID system did not always register birds, especially when they were lying down. Consequently, when a recording started, the RFID system might only have registered a bird when something in the position of the bird changed—for example, when it moved to a new antenna, as it was possibly no longer registering the previous position of the bird. This could result in the first ‘switch’ between antennas being missed, as only the second antenna might be registered, while on video, all movements from the start of the recording can be observed. Consequently, the RFID system might show a slightly lower recorded distance compared to video.
Second, as discussed earlier, the video can capture much smaller changes than the RFID system. On video, all changes can be observed, while the RFID system only registers movement between antennas, and not within antennas, which can cause the distance recorded with the RFID system to be lower. The absolute difference between the recorded distances on video and using RFID appeared larger when birds moved longer distances (
Figure 8a). Redfern et al. (2017) used a low frequency RFID tracking system in rats, with a setup similar to the setup in the current study, and compared RFID and manual distance tracking [
32]. They found a good correlation between the two (ICC = 0.83), although it depended on the position of their implanted RFID tag, but noted that the RFID distance was lower than the manual tracking for higher activity levels. One of their explanations for this discrepancy was that faster locomotion could have impacted the tracking accuracy [
32]. Indeed, other studies have reported that when tags move faster, their probability of registration can decline [
34]. In the current study, this may have impacted the recorded distances in two ways. First, some movement to and from antennas might be missed due to unrecorded antenna visits, resulting in a lower recorded RFID movement, and second, via the way the RFID distances were calculated. The RFID moving distances were based on the shortest possible straight line from one antenna to the other (see
Figure 5). It is, however, unlikely that animals always walk in a straight line from one antenna to another. Therefore, a part of the true distances moved may be missed by using the shortest possible route in the calculations. This influences the recorded distances between antennas that are not adjacent. Specifically, when an animal is registered at two subsequent antennas that are far apart, the absolute distance underestimation can become large, as the absolute difference between the calculated shortest route and possible true routes is especially large here. However, although in the current study the absolute difference between RFID and video was observed to be larger at higher distances, the relative difference appeared to remain relatively constant. Furthermore, the earlier-mentioned studies reporting an effect of movement speed of the tag on recording reliability implemented low frequency RFID, while in the current study, high frequency RFID was implemented, which has a faster read rate [
35]. Therefore, it is less likely that fast movements may have been missed in a similar way, and it appears more likely that the distances moved within the antennas are the main cause of the difference between RFID and video, as opposed to the moving speed of the birds.
Third, during this study, antenna 7 of the RFID system was not functioning and therefore not recording birds. Moreover, after this study, it was discovered that the antennas close to the drinker were no longer recording birds near the end of the tracking period, likely due to the moisture in the bedding underneath the drinker blocking the RFID signal. This could have resulted in some missed registrations, and hereby could have lowered the recorded RFID distance in comparison to video.
Overall, the distance moved calculated from the RFID data may not exactly represent true distances moved. However, the moderately strong correlation between video and RFID does allow comparison of activity levels between animals tracked with the same RFID setup.
4.2.2. RFID Versus UWB
There were moderately strong rank correlations between UWB and RFID in the one-hour sessions (0.70) and in the longer recordings (0.71). This indicates that the RFID system and the UWB system generally agree on the relative ranking of animals in terms of distances moved. Whether animals are tracked using the RFID system or the UWB system, the same animals will likely be identified as relatively active or inactive by both systems. In terms of absolute distances, the distance recorded with the UWB system was higher than the distance recorded with the RFID system for nearly all data points. This could again be explained by the RFID system not registering movement within antennas, while the UWB system can theoretically pick up on all movements. However, the difference between RFID and UWB may be enlarged by the localisation error or noise that may occur with the UWB system. There may be some noise in the localisation of the UWB system, which could result in slight deviations from the actual position of the bird over time, hereby increasing the recorded distance moved [
14]. The repeated-measures correlations on the longer-period UWB and RFID data showed that the distribution of data points differed somewhat between days and individuals. The differences in distribution of data points between individuals can be explained by differences in activity between birds, i.e., it can be expected that some birds are consistently more active than others or move faster, or in a different way, compared to others, which may affect the RFID and UWB recordings to some extent. The difference in distribution of data points between days is less intuitive. Although differences in overall activity levels are expected across days, theoretically the UWB and RFID systems function in a consistent manner and should therefore not show differences in the relationship between them. However, the systems can be affected by the surroundings. For example, metals or water in the environment may affect RFID systems [
35], while UWB systems may miss registrations when tags are in a (partially) covered position (e.g., [
36]; also for a discussion on how to deal with missing UWB registrations). In this study the surroundings were kept the same as much as possible, so it would be expected that the influence of water, metals and coverage of tags was the same across the entire trial and therefore the differences between days may simply reflect random noise. However, as mentioned earlier, the antennas close to the drinker were no longer recording birds near the end of the tracking period, likely due to the moisture in the bedding underneath the drinker blocking the RFID signal. This could have reduced the RFID recorded distances over time, and hereby the correlation between UWB and RFID. Regardless, as is shown in
Figure 10, the observed correlations did not differ much between the repeated-measures and assumed-independent data and the direction of the relationship between RFID and UWB appeared to be the same. In practice, the overall correlation across days and individuals seems the most relevant, as this is the correlation that is representative of comparing animals that are tracked at different timepoints, regardless of whether these same animals have been tracked before and on what specific day. It is important to note, however, that an approach like this does not take changes in activity over time within animals into account, so it would be advisable to only compare the activity of animals that are approximately the same age at the time of measurement. Overall, although there are differences between the two tracking systems in observed absolute distance moved, it appears that the RFID and UWB systems show good agreement on which animals are relatively active or inactive.
4.2.3. Video Versus UWB
There was also a moderately strong correlation between video and UWB, with r
s = 0.79. This indicates that the UWB recorded activity reflected the ranking of the animals in terms of distances moved well. In our previous study [
14], a similar approach was used and a correlation between video and UWB of 0.71 was reported. The correlation in the current study was somewhat higher, but it must be noted that the confidence interval for the correlation of 0.79 ranges from 0.53 to 0.92 and thus includes the earlier reported correlational value. Therefore, no strong conclusions can be drawn from this difference between studies. It is noteworthy, however, that in the current study the observations were made later in the life of the birds. In our earlier study [
14], the observations were made from 15 to 33 days old, while in the current study the observations were made from 25 to 33 days old. Given the decreasing trend in activity that is often reported as broilers age (e.g., [
14,
37,
38]), it was likely that in the current study somewhat lower average activity levels were included in the comparison between video and UWB, compared to the earlier study. However, the median distance moved on video, assumed to be the true distance moved, observed in the earlier study was approximately 20 m (ranging from approximately 2 to 57 m in this study), while in the current study this was approximately 21 m (ranging from approximately 10 to 53 m). The setup of the current study did, however, differ in comparison to our earlier study in terms of, among other things, the placement of water and food, the density of the birds and the human scorer of the videos. Possibly, this may have influenced the observed correlation, but this could not be confirmed with the data from the current study. Generally, however, it is important to note that the distance comparisons in this study, with exception of the RFID-UWB comparison over longer periods of time, were made using data from 25 to 33 days old, and therefore the observed correlations are representative only of the later part of broiler production. Although it is not expected that the relationships between systems are very different at different timepoints, additional work involving RFID early in life is needed to confirm equal performance of the RFID system at younger ages.
Overall, the moderately strong correlations between the different observation methods suggest that the RFID system and the UWB system are both suitable for estimating differences in activity levels between individual birds. However, as the RFID system allows for monitoring activity from hatching onward, due to its small and lightweight tags, it is here deemed to be the preferable method for tracking individual activity in group-housed broilers throughout life.
4.3. Future Prospects for Implementation of the RFID System
The RFID system that was implemented here shows great potential for recording individual activity levels of broilers throughout life, on multiple animals simultaneously, in a time-efficient and objective manner. The current setup provided a high level of detail, using antennas with a size of 32 by 41 cm, and can be of great value in research into behaviour of group-housed birds. However, as mentioned earlier, some difficulties were experienced with the RFID system. One antenna was not recording animals due to a technical error that was related to a faulty contact in the antenna. Further, several antennas were not recording birds at the end of the trial due to moisture in the bedding underneath the drinker. In general, the RFID system can be sensitive to the environment, which is important to take into account when implementing the system in practice. Furthermore, the RFID system used here is relatively easy to dismantle and move to a different location, but it would be advisable to setup the system in a location where it can remain for longer periods of time, as the transport and change in surroundings can result in recalibration of antennas being required for the system to work as desired and cleaning of the antennas is difficult as no water can be used.
The intended purpose of implementing an RFID system is important to consider when selecting a system, as this may affect the requirements for the RFID system. For example, the current setup implemented high frequency RFID, among other things, to allow registrations of multiple animals at an antenna and avoid data collision. However, the radio frequency also has consequences for how much the system is affected by water and metal in the environment and what communication ranges can be achieved [
35], and it is therefore important to weigh up the benefits and downsides when selecting a system. The level of spatial resolution can also vary, depending on the antenna size and configuration. For more detailed position recording, more and smaller antennas may be desired. However, for larger scale implementations in practice, a high spatial resolution may not be realistic. Given that it is not feasible to fit large housings with a full grid of antennas of the current size, an alternative could be to fit specific areas in the housing with antennas—for example, the feeders. This would not provide the detail in the activity level that could be recorded in the present study, but does allow one to keep track of feeder visits. Another option would be to use several line antennas to divide the overall area into different zones, and to study how often birds switch between zones. Future research could look into how well these crude measurements correlate with detailed data on activity levels in order to determine whether these crude measurements can serve as a proxy for activity in large scale production environments.
Future research should furthermore look into alternative methods for attaching the RFID tags to the legs. The rubber bands used in this study were effective, i.e., the tags were well secured and not often lost, and evoked little reaction from the broilers after a short habituation period in which some pecking at the leg bands was observed, suggesting that the leg tags did not interfere with the normal behaviour of the broilers. Furthermore, no issues were observed with the rubber bands catching on objects in the environment, although it must be noted that all the objects in the pen and the pen walls had smooth surfaces. However, the leg bands had to be checked every couple of days and had to be switched to a larger size during the trial to avoid the rubber bands becoming too tight. Therefore, there would be added value to leg bands that can keep up with the growth of the broilers’ legs in order to reduce the required manual labour.
Future research should also look into the potential of using RFID recordings to determine true distances moved in more detail. The relationship between RFID and video, which seems to show a linear pattern, indicates that there is potential to use RFID recordings to estimate true distances moved. Although not studied here, the RFID system could possibly be implemented to study true distances moved of group-housed birds, which could be a valuable tool in, for example, determining threshold levels of activity for reducing leg problems.
5. Conclusions
It was studied here whether a passive high frequency RFID tracking system was suitable for monitoring the individual levels of activity of broilers throughout life. In 62.5% of the cases, the RFID system was in full agreement with video in terms of the location of the animals. In total, 99.2% near matches, allowing for a deviation of one antenna, were observed between RFID and video in terms of location. There were moderately strong correlations in terms of distances moved between RFID and video (rs = 0.82) and between RFID and UWB (rs = 0.70). This indicates that the RFID system can accurately register among-individual variation in activity. However, the absolute values of the RFID recorded distances are generally an underestimation of the true distances moved. Overall, the RFID system appears suitable for monitoring the relative activity of individual group-housed broilers and can contribute to obtaining activity measures at the individual level early, and later, in life. Main benefits of the RFID system for tracking activity, compared to, for example, UWB tracking or video observations, include its small, lightweight tags that allow tracking of broilers from hatching onwards, limited manual labour and reliable identification of individuals. Data on activity levels early in life can potentially aid in identifying and predicting health, welfare and production parameters, but more research in this area is required.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}