Genetic Optimization-Based Consensus Control of Multi-Agent 6-DoF UAV System




Abstract
1. Introduction
1.1. Multi-Agent Systems
1.1.1. Consensus Control
1.1.2. Formation Control
1.1.3. Optimization Techniques
1.1.4. Genetic Algorithm
- (1)
- Selection: The selection operation forms a mating pool for the next generation by selecting genes (parents) from the existing generation.
- (2)
- Crossover: The crossover process combines two of the parents to form the next generation (children).
- (3)
- Mutation: The mutation forms new children by applying random changes to the parents.
1.2. Literature Survey
1.3. Motivation and Contributions
- Proposing a new consensus controlling scheme based on optimization techniques for a MAS of 6-degree of freedom (DOF) quadrotors.
- Simulating a leader–follower topology in some cases by adding additional terms to control the geometry of the agents, and if these terms are equalized to zero, the agents goes to the consensus case.
1.4. Notations
1.5. Paper Organization
2. Preliminaries and Problem Statement
2.1. Quadrotor Mathematical Model
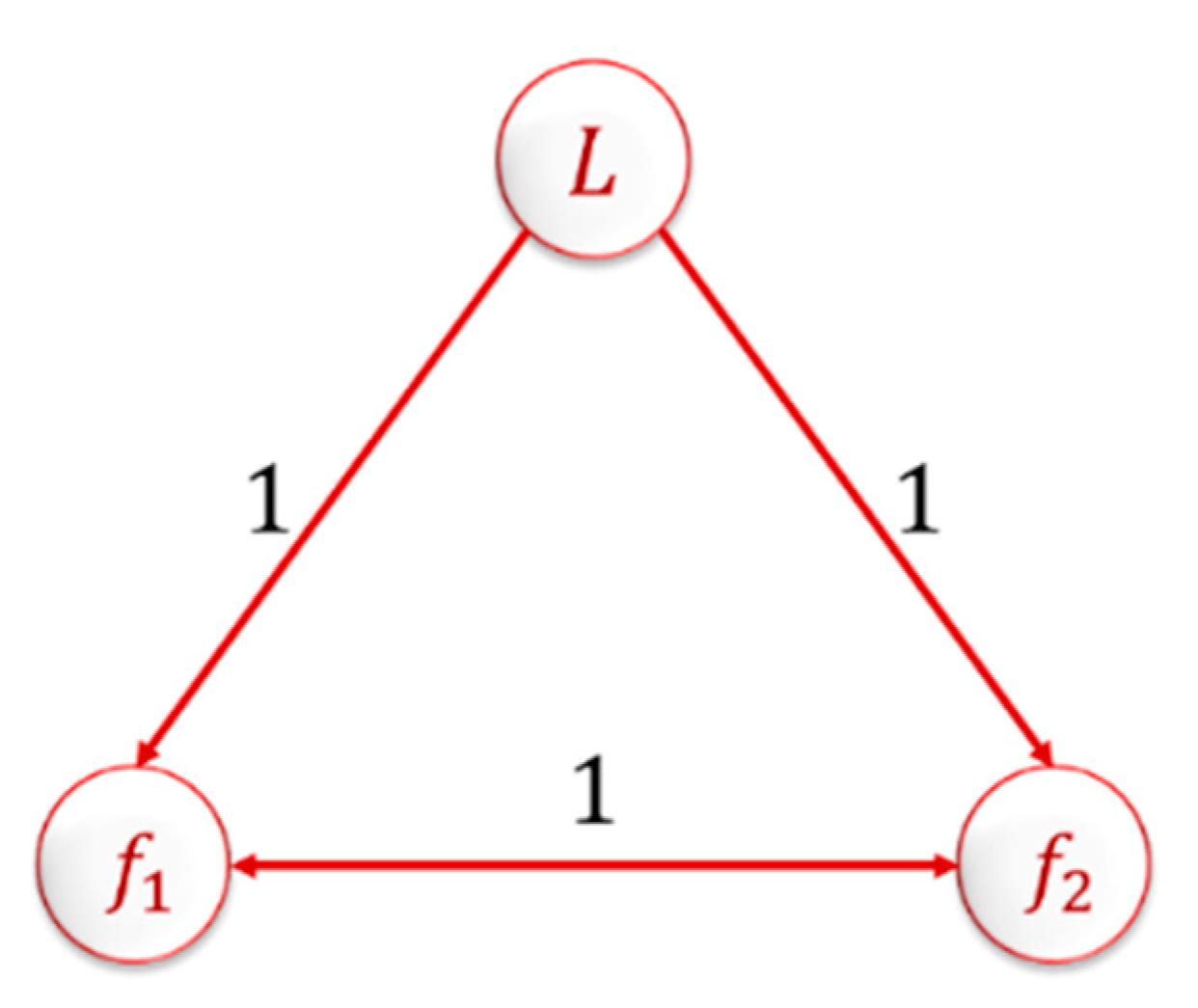
2.2. Graph Theory
- Determining the number of agents.
- Deriving a graph based on agent communication.
- Deriving an adjacency matrix from the graph.
- Converting the adjacency matrix into a Laplacian matrix.
- Using the Laplacian matrix to design the consensus controller.
2.2.1. Adjacency and Degree Matrices
2.2.2. Laplacian Matrix
2.3. Mathematical Representation of Consensus Control
2.3.1. Single-Integrator MAS
2.3.2. Double-Integrator MAS
2.3.3. Higher-Order MAS
2.4. Problem Statement
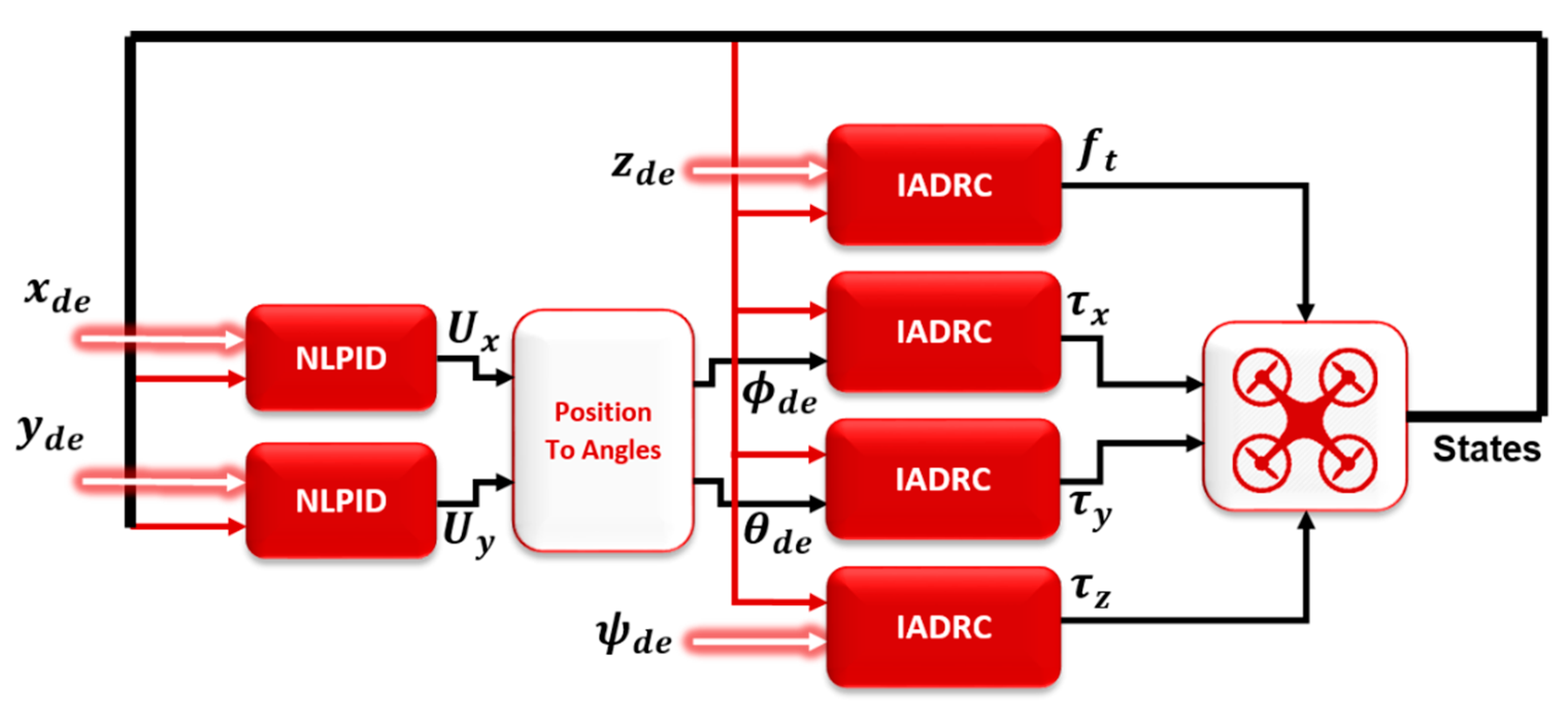
3. Proposed Controlling Scheme Design
3.1. Nonlinear PID (NLPID) Controller
3.2. Improved Active Disturbance Rejection Control (IADRC)
3.2.1. Design of Linear Extended State Observer (LESO)
3.2.2. Design of Improved Tracking Differentiator (ITD)
3.2.3. Design of Nonlinear PD Controller (NLPD)
3.3. Consensus Control for Position Subsystems
3.4. Consensus Control for and Subsystems
4. Simulation Results and Discussion
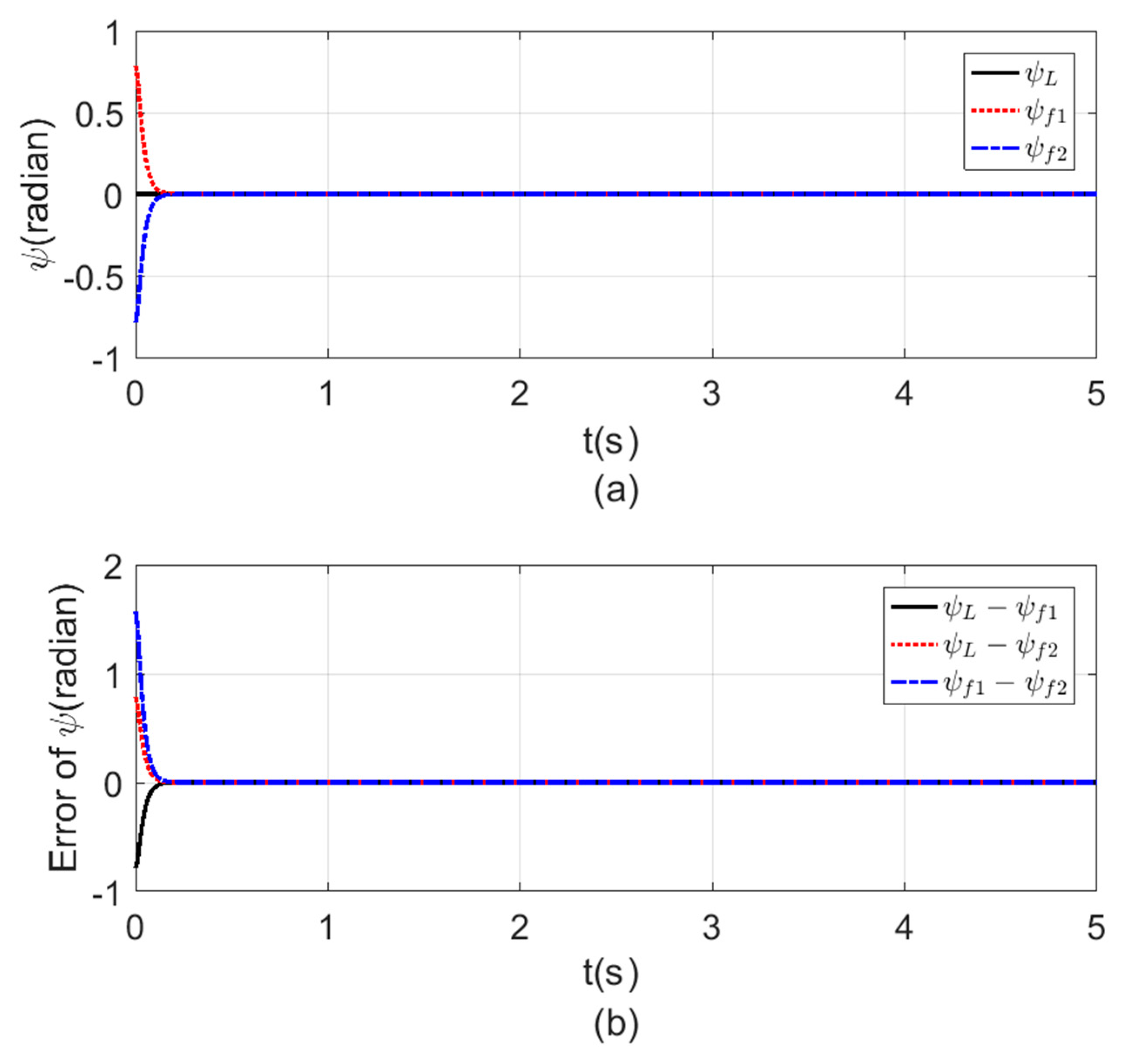
4.1. Achieving Consensus
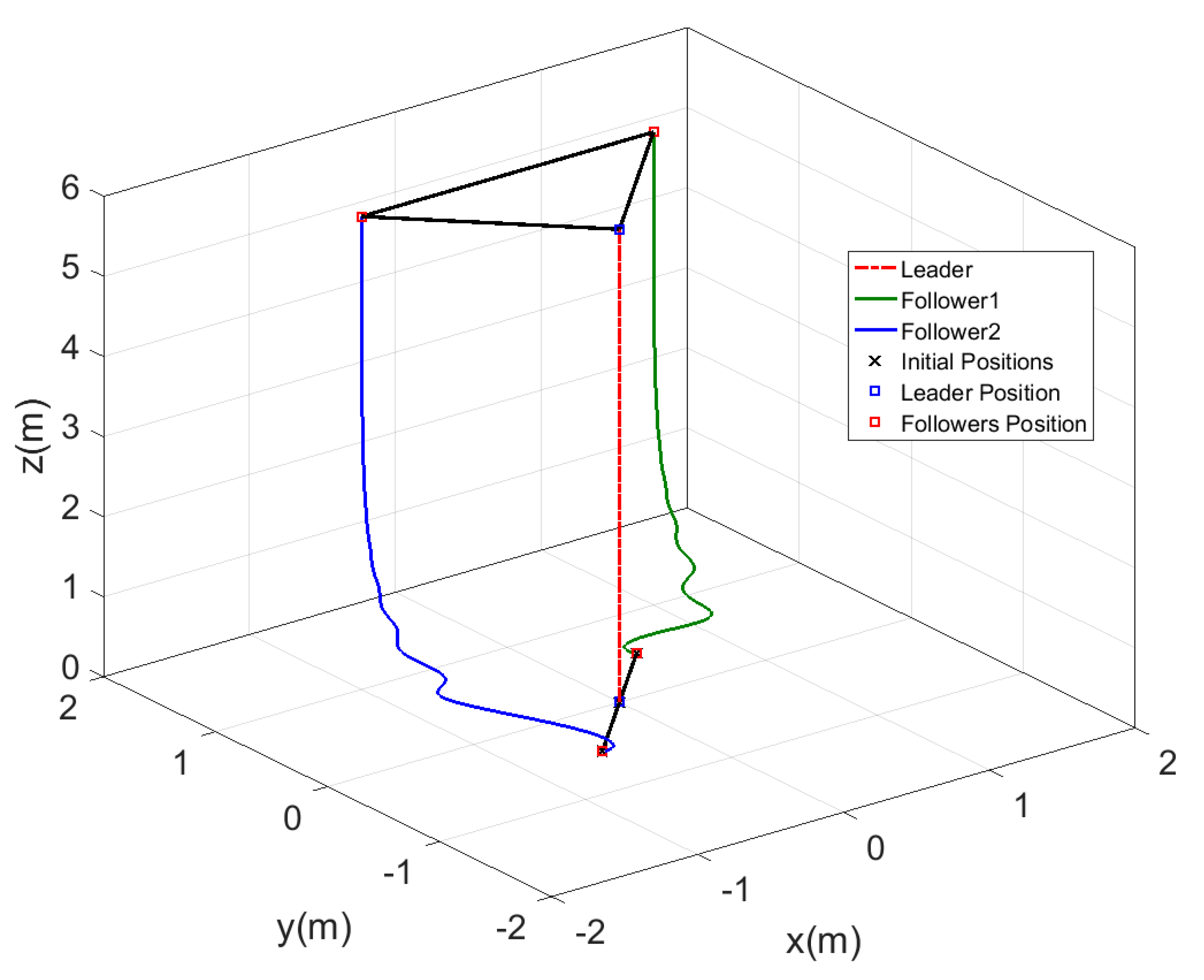
4.2. Fixed Triangle Formation
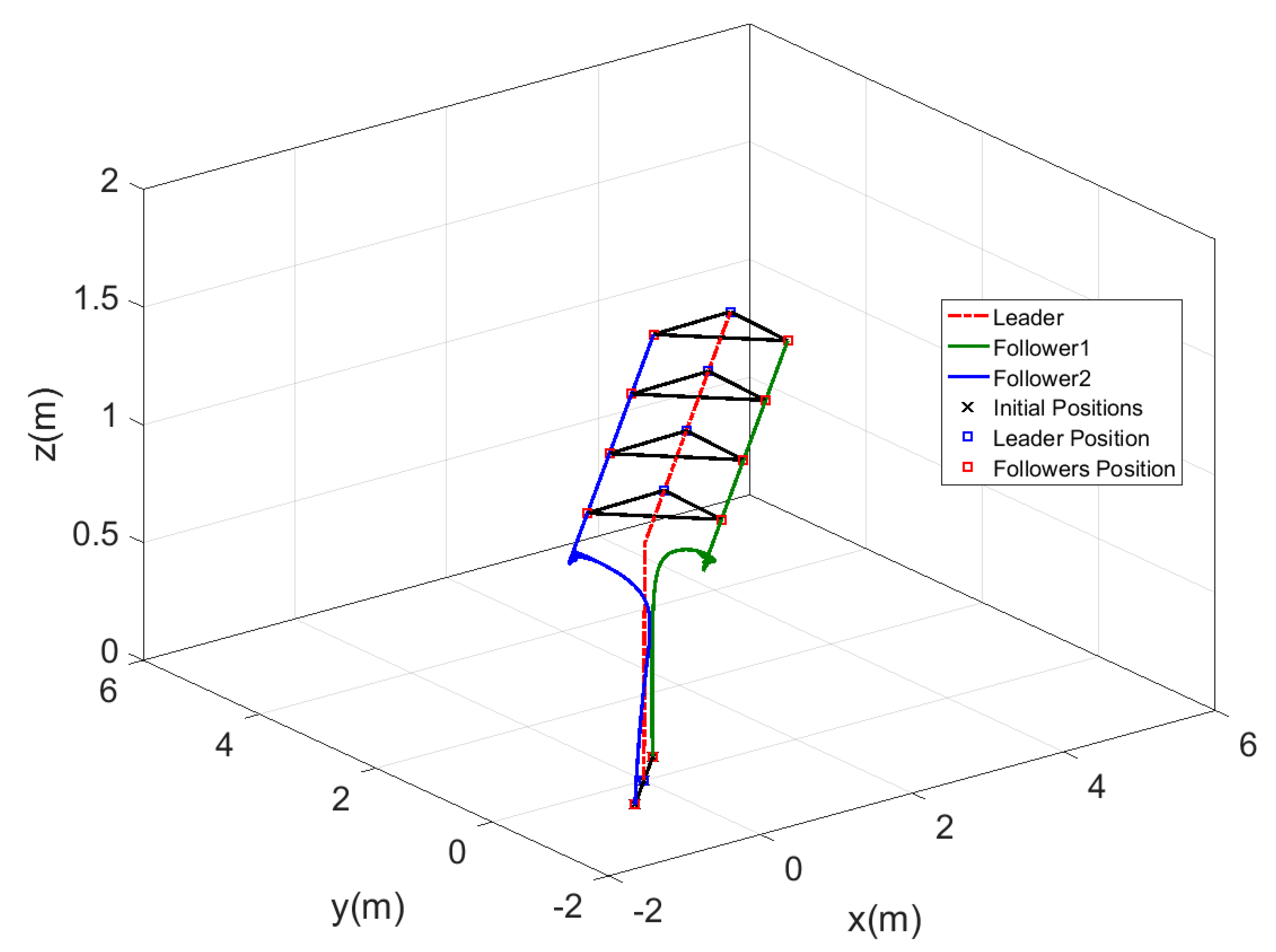
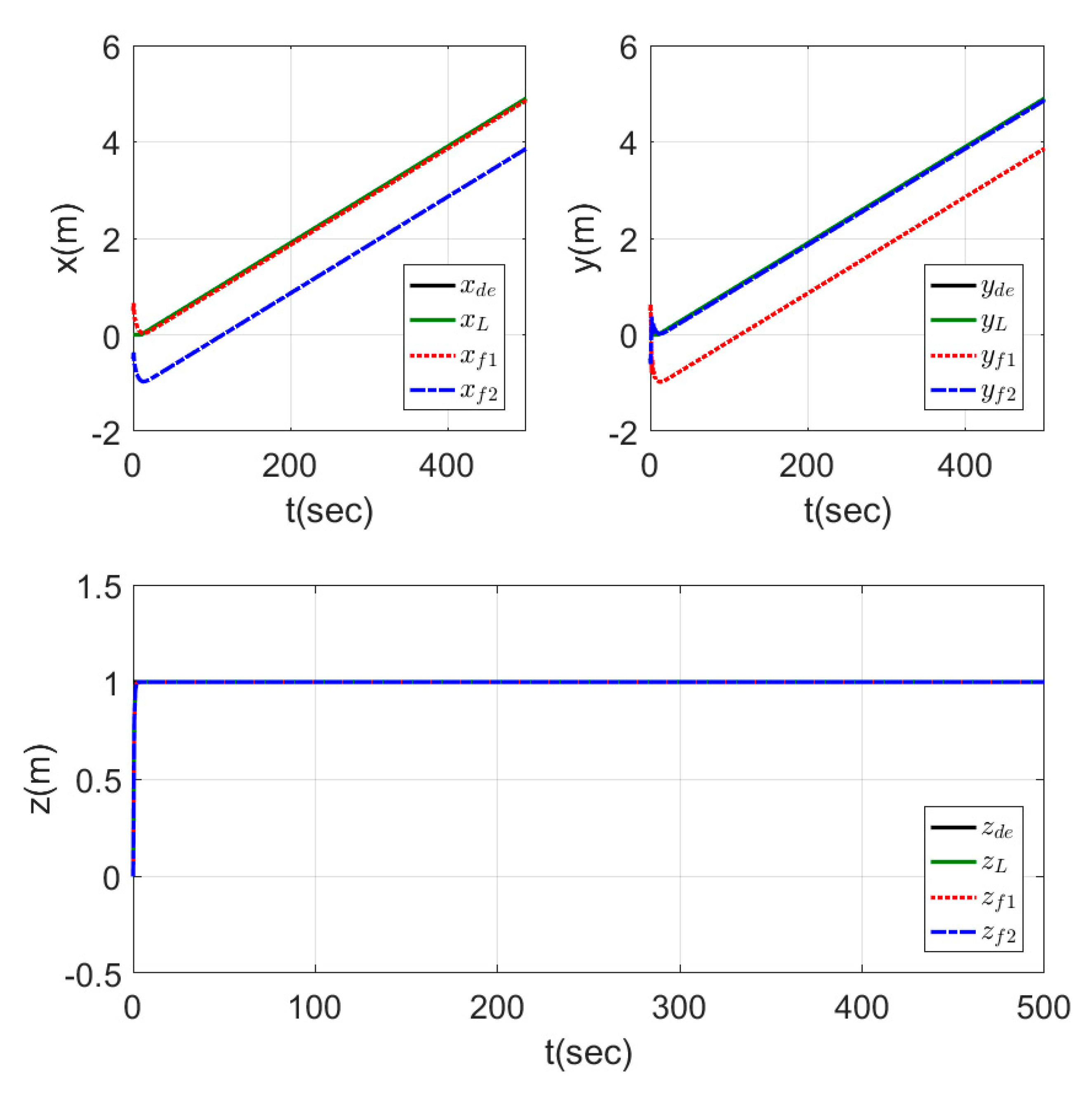
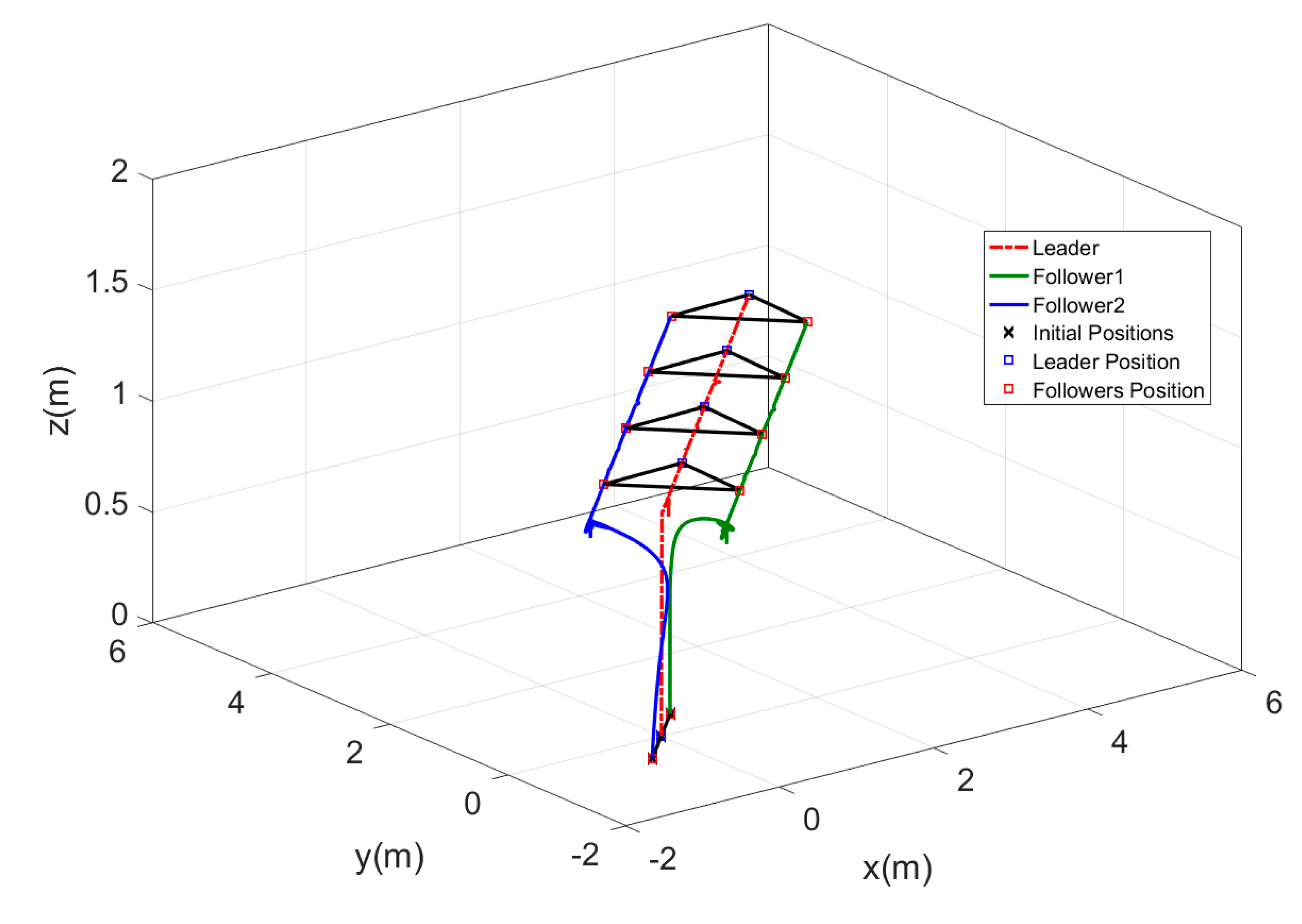
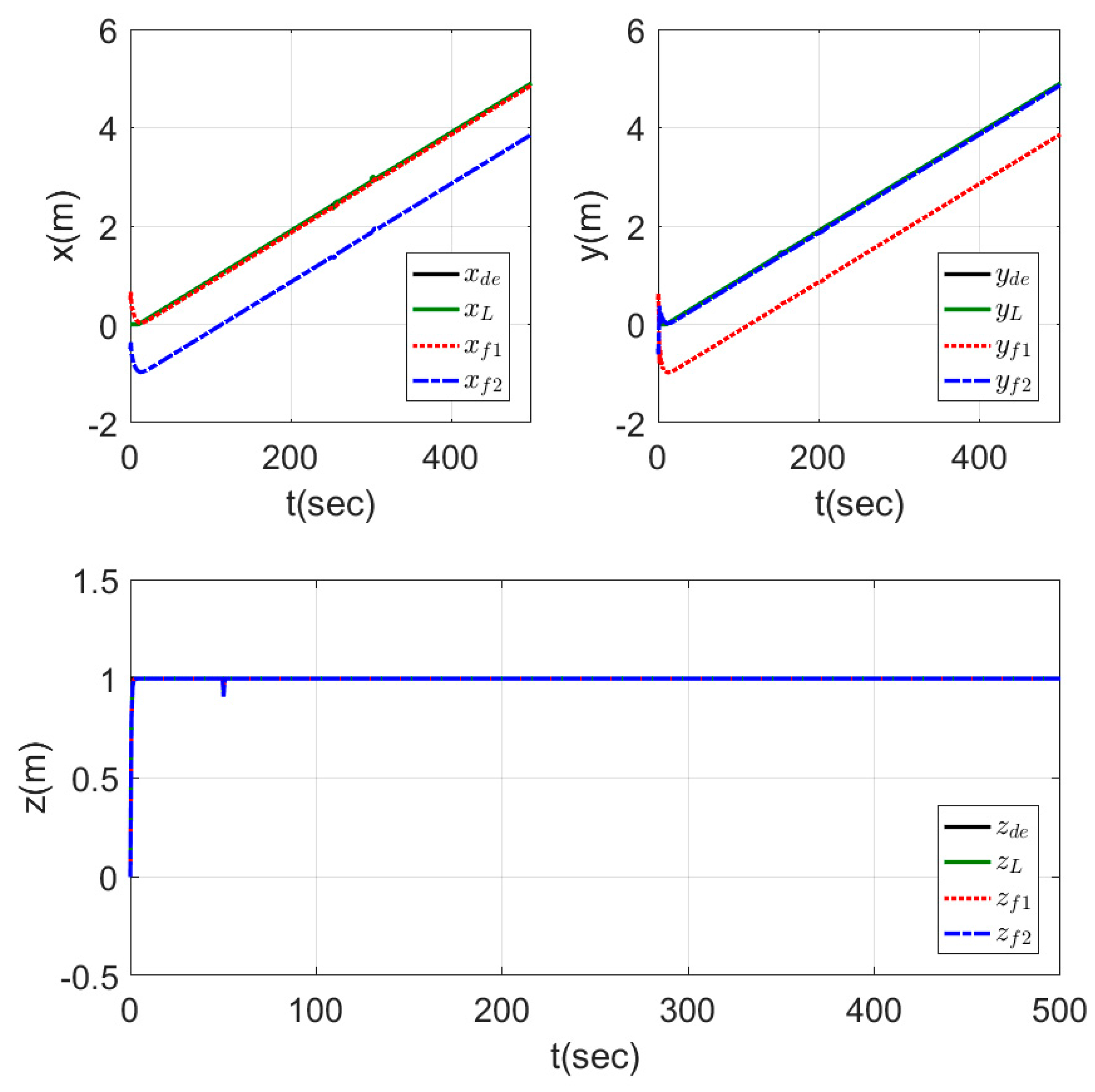
4.3. Fixed Formation Tracking Ramp Trajectory
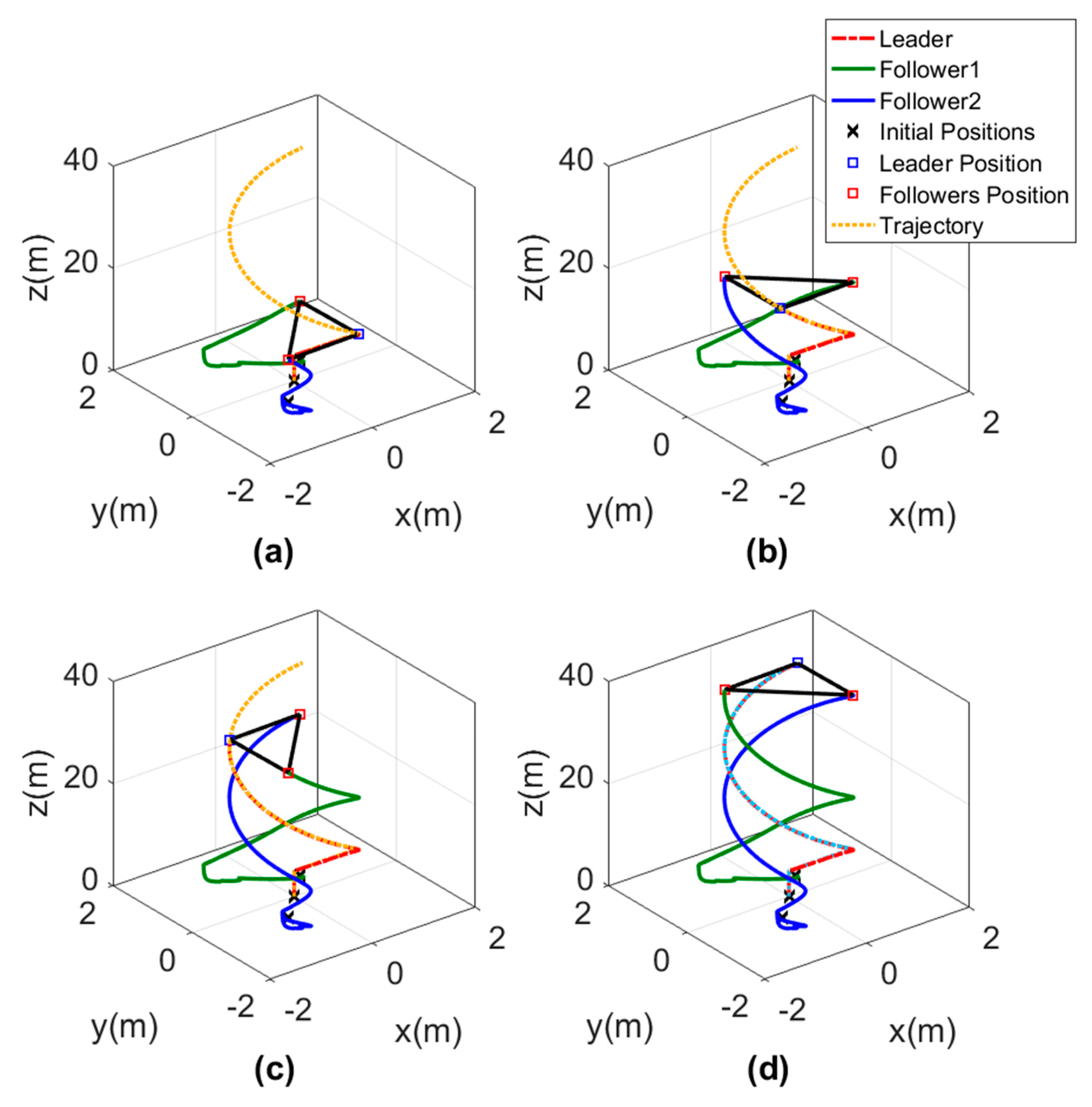
4.4. Leader Orientation-Based Formation Tracking a Helical Trajectory
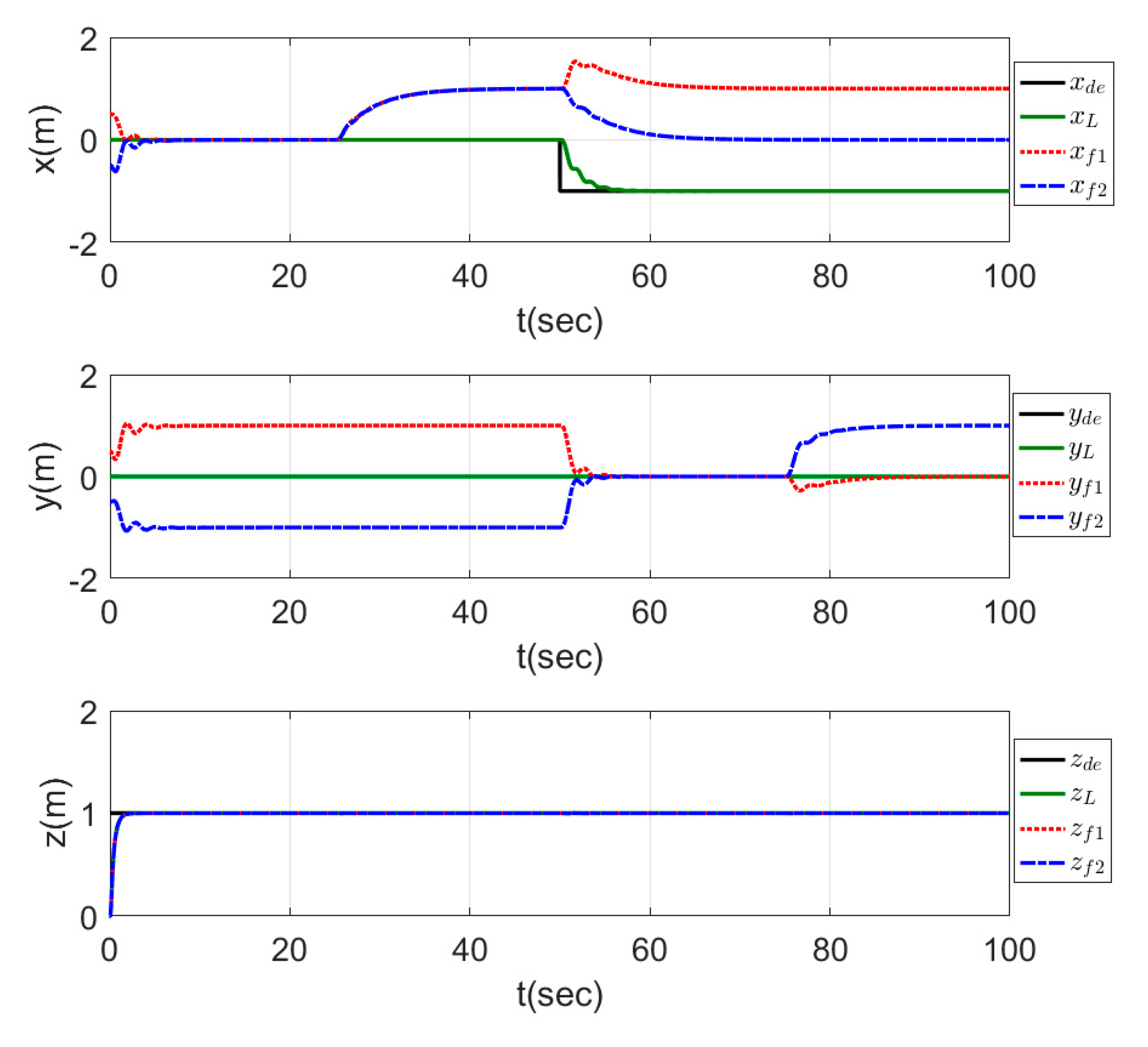
4.5. Switching Formation Topology
4.6. Fixed Formation Tracking with Exogenous Disturbances
5. Conclusions and Future Aspects
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix A.1. Coordinate Systems

Appendix A.2. Euler Angles

Appendix A.3. Model Assumptions
- The quadrotor is rigid.
- The quadrotor structure is symmetric.
- The ground effect is neglected.
- The center of gravity origin and the principal axes coincide with the body frame origin and axes.
- Input forces and torques proportional to the squared angular velocity of the rotors.
Appendix A.4. Mathematical Model
Appendix A.5. Quadrotor Forces and Moments
Appendix A.6. Rotor Dynamics Modeling
References
- Ghamry, K.A.; Zhang, Y. Cooperative control of multiple UAVs for forest fire monitoring and detection. In Proceedings of the 12th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA), Auckland, New Zealand, 29–31 August 2016; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Hou, Z.; Wang, W.; Zhang, G.; Han, C. A survey on the formation control of multiple quadrotors. In Proceedings of the 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, 28 June–1 July 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017; pp. 219–225. [Google Scholar] [CrossRef]
- Lee, H.; Kim, H.; Kim, H.J. Planning and Control for Collision-Free Cooperative Aerial Transportation. IEEE Trans. Autom. Sci. Eng. 2016, 15, 189–201. [Google Scholar] [CrossRef]
- Xu, B.; Lin, H.; Wagholikar, K.B.; Yang, Z.; Liu, H. Identifying protein complexes with fuzzy machine learning model. Proteome Sci. 2013, 11, S21. [Google Scholar] [CrossRef] [PubMed]
- Alkamachi, A.; Erçelebi, E. Modelling and Genetic Algorithm Based-PID Control of H-Shaped Racing Quadcopter. Arab. J. Sci. Eng. 2017, 42, 2777–2786. [Google Scholar] [CrossRef]
- Ibraheem, I.K.; Ibraheem, G.A. Motion Control of An Autonomous Mobile Robot using Modified Particle Swarm Optimization Based Fractional Order PID Controller. Eng. Tech. J. 2016, 34, 2406–2419. [Google Scholar]
- Ibraheem, I.K.; Ajeil, F.H. Path Planning of an autonomous Mobile Robot using Swarm Based Optimization Techniques. Al-Khwarizmi Eng. J. 2017, 12, 12–25. [Google Scholar] [CrossRef]
- Ajeil, F.H.; Ibraheem, I.K.; Sahib, M.A.; Humaidi, A.J. Multi-objective path planning of an autonomous mobile robot using hybrid PSO-MFB optimization algorithm. Appl. Soft Comput. 2020, 89, 106076. [Google Scholar] [CrossRef]
- Abbas, N.H.; Sami, A.R. Tuning of PID Controllers for Quadcopter System using Hybrid Memory based Gravitational Search Algorithm–Particle Swarm Optimization. Int. J. Comput. Appl. Technol. 2017, 172, 9–18. [Google Scholar]
- Wooldridge, M.J. An Introduction to Multiagent Systems, 2nd ed.; John Wiley & Sons: Chichester, UK, 2009. [Google Scholar]
- Chong, C.-Y. Forty years of distributed estimation: A review of noteworthy developments. In Proceedings of the 2017 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 10–12 October 2017; 2017; pp. 1–10. [Google Scholar] [CrossRef]
- Li, Z.; Duan, Z. Cooperative Control of Multi-Agent Systems: A Consensus Region Approach; CRC Press: Florida, FL, USA, 2017. [Google Scholar]
- Ren, W.; Beard, R.W. Distributed Consensus in Multi-vehicle Cooperative Control; Springer: London, UK, 2008. [Google Scholar]
- Mesbahi, M.; Egerstedt, M. Graph Theoretic Methods in Multiagent Networks; Princeton University Press: New Jersey, NJ, USA, 2010. [Google Scholar]
- Chen, T.; Shan, J. Distributed Tracking of a Class of Underactuated Lagrangian Systems With Uncertain Parameters and Actuator Faults. IEEE Trans. Ind. Electron. 2020, 67, 4244–4253. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, Q.; Wang, Y.; Yu, D. Consensus algorithm for multiple quadrotor systems under fixed and switching topologies. J. Syst. Eng. Electron. 2013, 24, 818–827. [Google Scholar] [CrossRef]
- Eskandarpour, A.; Majd, V.J. Cooperative formation control of quadrotors with obstacle avoidance and self collisions based on a hierarchical MPC approach. In Proceedings of the Second RSI/ISM International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 15–17 October 2014; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2014; pp. 351–356. [Google Scholar] [CrossRef]
- Rabah, A.; Qing-he, W. Adaptive Leader Follower Control for Multiple Quadrotors via Multiple Surfaces Control. J. Beijing Inst. Technol. 2016, 25, 526–532. [Google Scholar]
- Alrawi, W.M.J. Improving Leader-Follower Formation Control Performance for Quadrotors. Ph.D. Thesis, University of Essex, Colchester, UK, 2016. [Google Scholar]
- Huang, Z. Consensus Control of Multiple-Quadcopter Systems Under Communication Delays. Master’s Thesis, Dalhousie University, Halifax, NS, Canada, 2017. [Google Scholar]
- Mahfouz, M.; Hafez, A.T.; Ashry, M.; Elnashar, G. Formation Configuration for Cooperative Multiple UAV Via Backstepping PID Controller. 2018. Available online: https://arc.aiaa.org/doi/abs/10.2514/6.2018-5282 (accessed on 16 June 2020).
- Du, H.; Zhu, W.; Wen, G.; Duan, Z.; Lu, J. Distributed Formation Control of Multiple Quadrotor Aircraft Based on Nonsmooth Consensus Algorithms. IEEE Trans. Cybern. 2019, 49, 342–353. [Google Scholar] [CrossRef] [PubMed]
- Najm, A.A.; Ibraheem, I.K. Nonlinear PID controller design for a 6-DOF UAV quadrotor system. Eng. Sci. Technol. Int. J. 2019, 22, 1087–1097. [Google Scholar] [CrossRef]
- Najm, A.A.; Ibraheem, I.K. Altitude and Attitude Stabilization of UAV Quadrotor System using Improved Active Disturbance Rejection Control. Arab. J. Sci. Eng. 2020, 45, 1985–1999. [Google Scholar] [CrossRef]
- Isira, A.S.M. Consensus Control of a Class of Nonlinear Systems. Ph.D. Thesis, University of Manchester, Manchester, UK, 2016. [Google Scholar]
- Riyadh, W.; Kasim, I.; Abdul-Adheem, W.R.; Ibraheem, I.K. From PID to Nonlinear State Error Feedback Controller. Int. J. Adv. Comput. Sci. Appl. 2017, 8, 312–322. [Google Scholar] [CrossRef]
- Kasim, I.; Riyadh, W. On the Improved Nonlinear Tracking Differentiator based Nonlinear PID Controller Design. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 234–241. [Google Scholar] [CrossRef]
- Ibraheem, I.K. Anti-Disturbance Compensator Design for Unmanned Aerial Vehicle. J. Eng. 2019, 26, 86–103. [Google Scholar] [CrossRef][Green Version]
- Abdul-Adheem, W.R.; Ibraheem, I.K. An Improved Active Disturbance Rejection Control for a Differential Drive Mobile Robot with Mismatched Disturbances and Uncertainties. Available online: https://arxiv.org/abs/1805.12170 (accessed on 25 May 2018).
- Humaidi, A.J.; Ibraheem, I.K. Speed Control of Permanent Magnet DC Motor with Friction and Measurement Noise Using Novel Nonlinear Extended State Observer-Based Anti-Disturbance Control. Energies 2019, 12, 1651. [Google Scholar] [CrossRef]
- Sabatino, F. Quadrotor Control: Modeling, Nonlinear Control Design, and Simulation. Master’s Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2015. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description | Units |
|---|---|---|
| Linear position vector | m | |
| Angular position vector | Rad | |
| Linear velocity vector | m/s | |
| Angular velocity vector | Rad/s | |
| Moment of inertia vector | kg·m2 | |
| Total thrust generated by rotors | N | |
| Control torques | N m | |
| Wind force vector | N | |
| Wind torque vector | N m | |
| Gravitational force | m/s2 | |
| Total mass | kg | |
| and | ||
| Parameter | Value | Description | Unit |
|---|---|---|---|
| Moment of inertia around -axis | |||
| Moment of inertia around -axis | |||
| Moment of inertia around -axis | |||
| Gravitational force | |||
| Total mass | |||
| Thrust coefficient | |||
| Drag coefficient | |||
| Motor to center length |
| Consensus Control | |||
|---|---|---|---|
| ITAE1 | ITAE2 | ITAE3 | |
| OPI | |||
| Initial States | ||||
|---|---|---|---|---|
| Leader | ||||
| Follower 1 | ||||
| Follower 2 | ||||
| State | Reference Trajectory | Time (s) |
|---|---|---|
| *] | ||
| *] | ||
| *] | ||
| *] |
| Leader | Follower 1 | Follower 2 | |
|---|---|---|---|
| 0 | |||
| 0 | |||
| State | Reference Trajectory | Time (s) |
|---|---|---|
| *] | ||
| *] | ||
| *] |
| Leader | Follower 1 | Follower 2 | |
|---|---|---|---|
| 0 | |||
| 0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Najm, A.A.; Ibraheem, I.K.; Azar, A.T.; Humaidi, A.J. Genetic Optimization-Based Consensus Control of Multi-Agent 6-DoF UAV System. Sensors 2020, 20, 3576. https://doi.org/10.3390/s20123576
Najm AA, Ibraheem IK, Azar AT, Humaidi AJ. Genetic Optimization-Based Consensus Control of Multi-Agent 6-DoF UAV System. Sensors. 2020; 20(12):3576. https://doi.org/10.3390/s20123576
Chicago/Turabian StyleNajm, Aws Abdulsalam, Ibraheem Kasim Ibraheem, Ahmad Taher Azar, and Amjad J. Humaidi. 2020. "Genetic Optimization-Based Consensus Control of Multi-Agent 6-DoF UAV System" Sensors 20, no. 12: 3576. https://doi.org/10.3390/s20123576
APA StyleNajm, A. A., Ibraheem, I. K., Azar, A. T., & Humaidi, A. J. (2020). Genetic Optimization-Based Consensus Control of Multi-Agent 6-DoF UAV System. Sensors, 20(12), 3576. https://doi.org/10.3390/s20123576