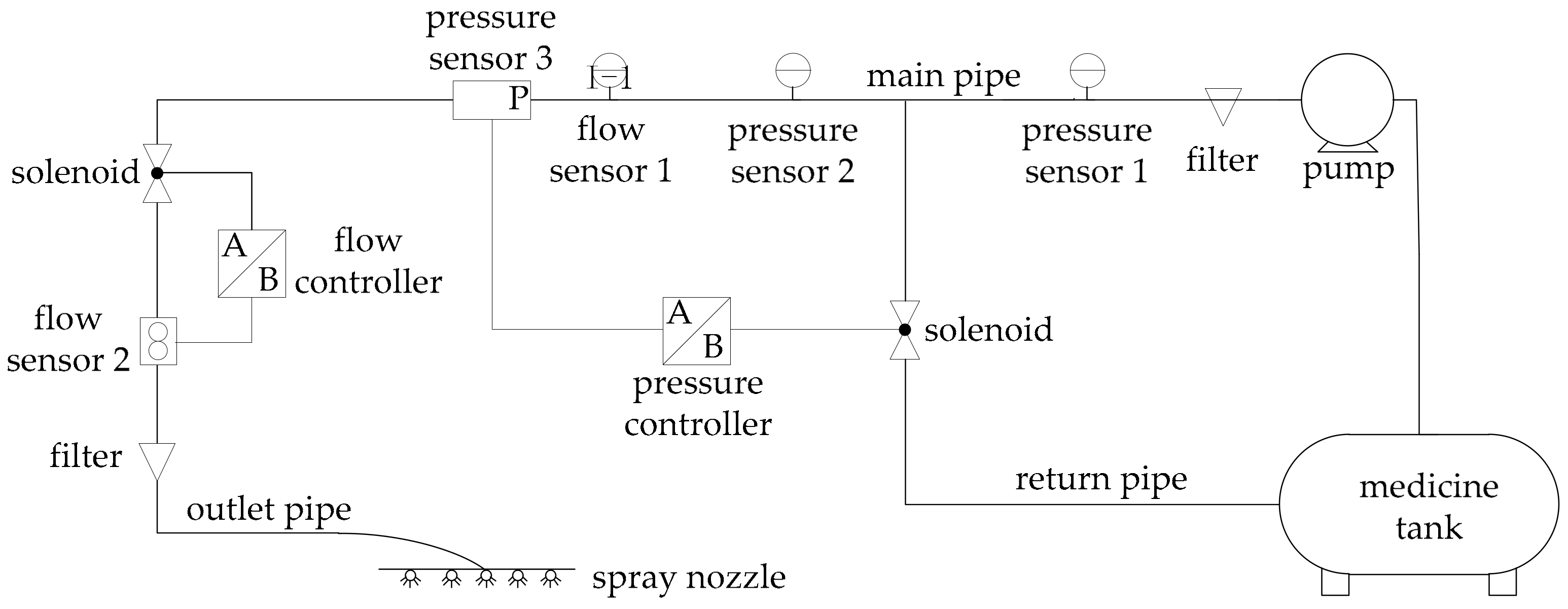
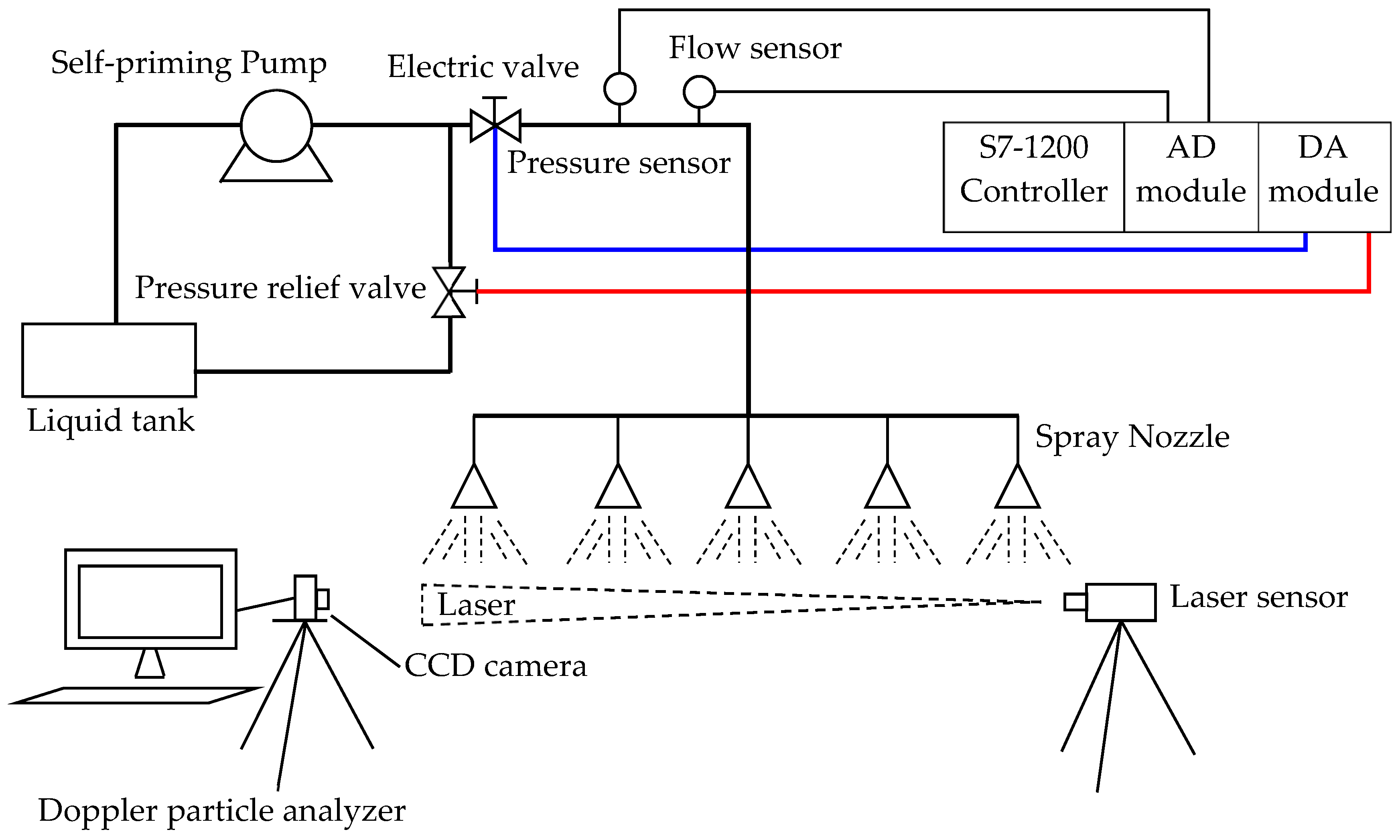
According to the description of the multi-sensor variable spray system, three input signals of the crop prescription map, the driving speed, and the working width of the agricultural implement were sampled to the controller through the sensor. The controller was programmed to output the control voltage, which is responsible for controlling the opening of the electric regulating valve. The opening degree in turn determined the flow rate of the pesticide sprayed by the variable system. There would be a long delay from the three input signals to the output signal. In addition, the amount of the pesticide changed in response to the demand information of different crops. Apparently, the multi-sensor control object had the characteristics of large inertia, nonlinearity, strong lag, and multi-time variation, and it was difficult to obtain an accurate mathematical model. The conventional control methods are based on expert experience and multiple trial and error methods, so it can be truly hard to control the multi-sensor variable spray system. Now the chaos optimization fuzzy control algorithm provides a better solution to this problem.
3.3. Chaos Optimization Algorithm for Controller
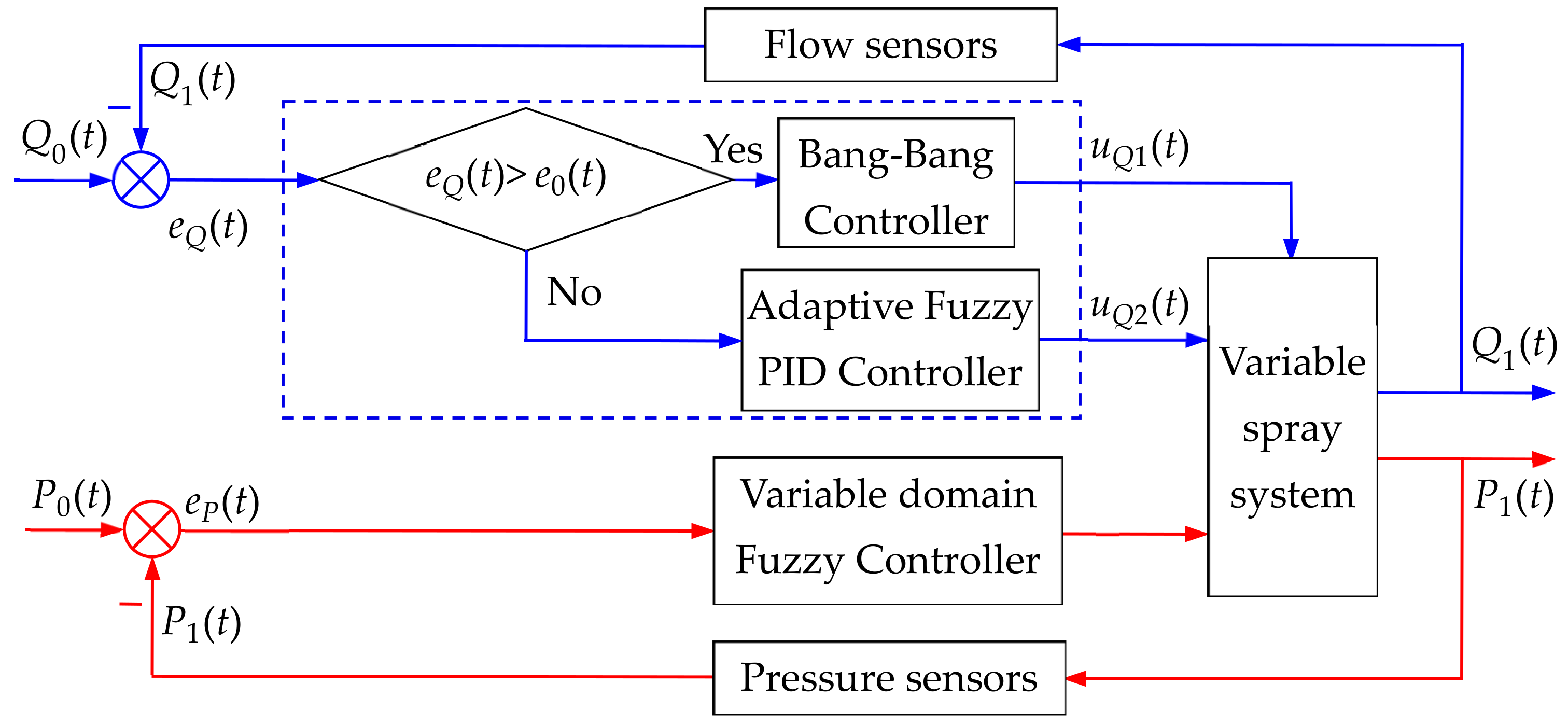
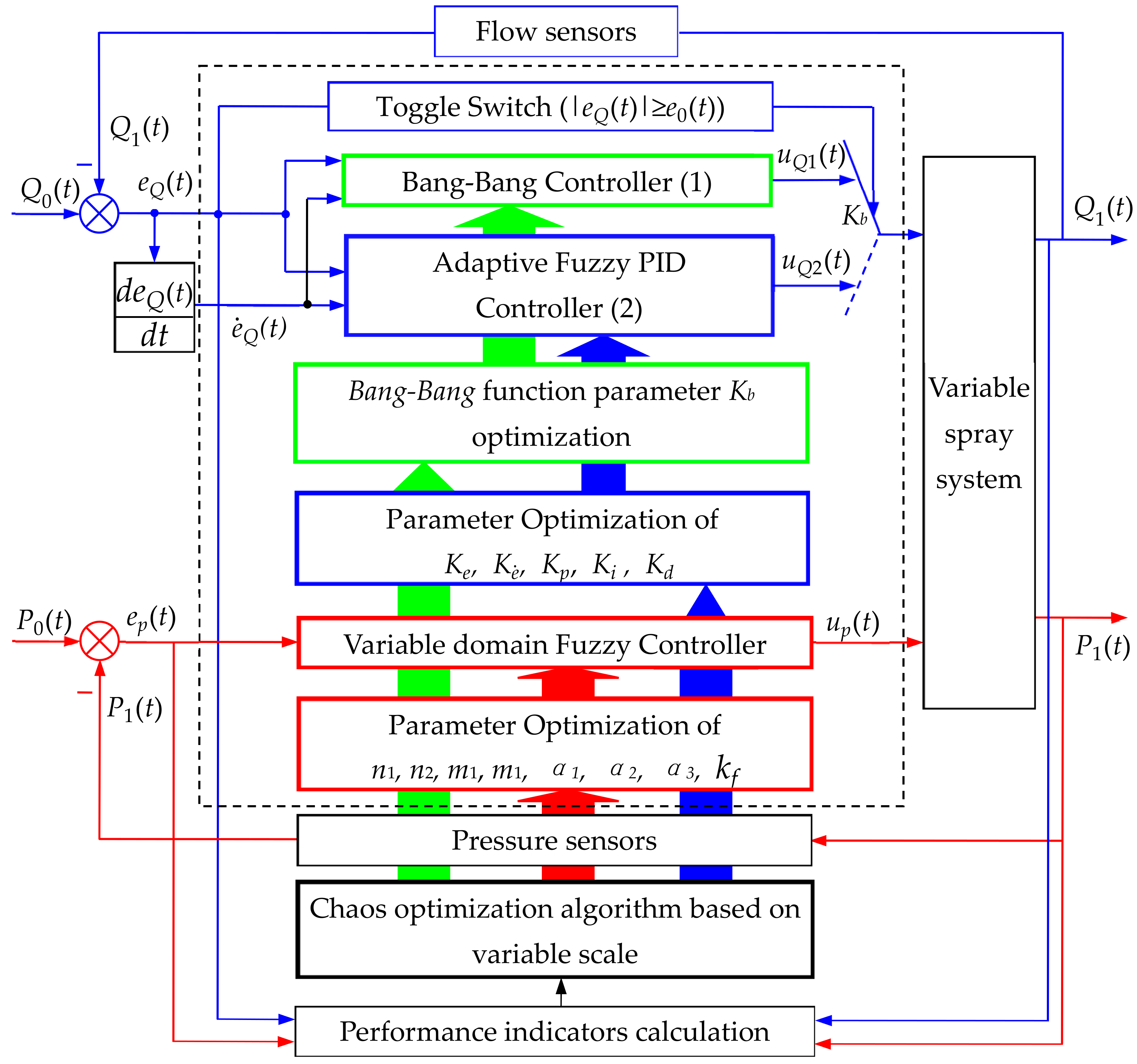
The control core of the variable spray, as shown in
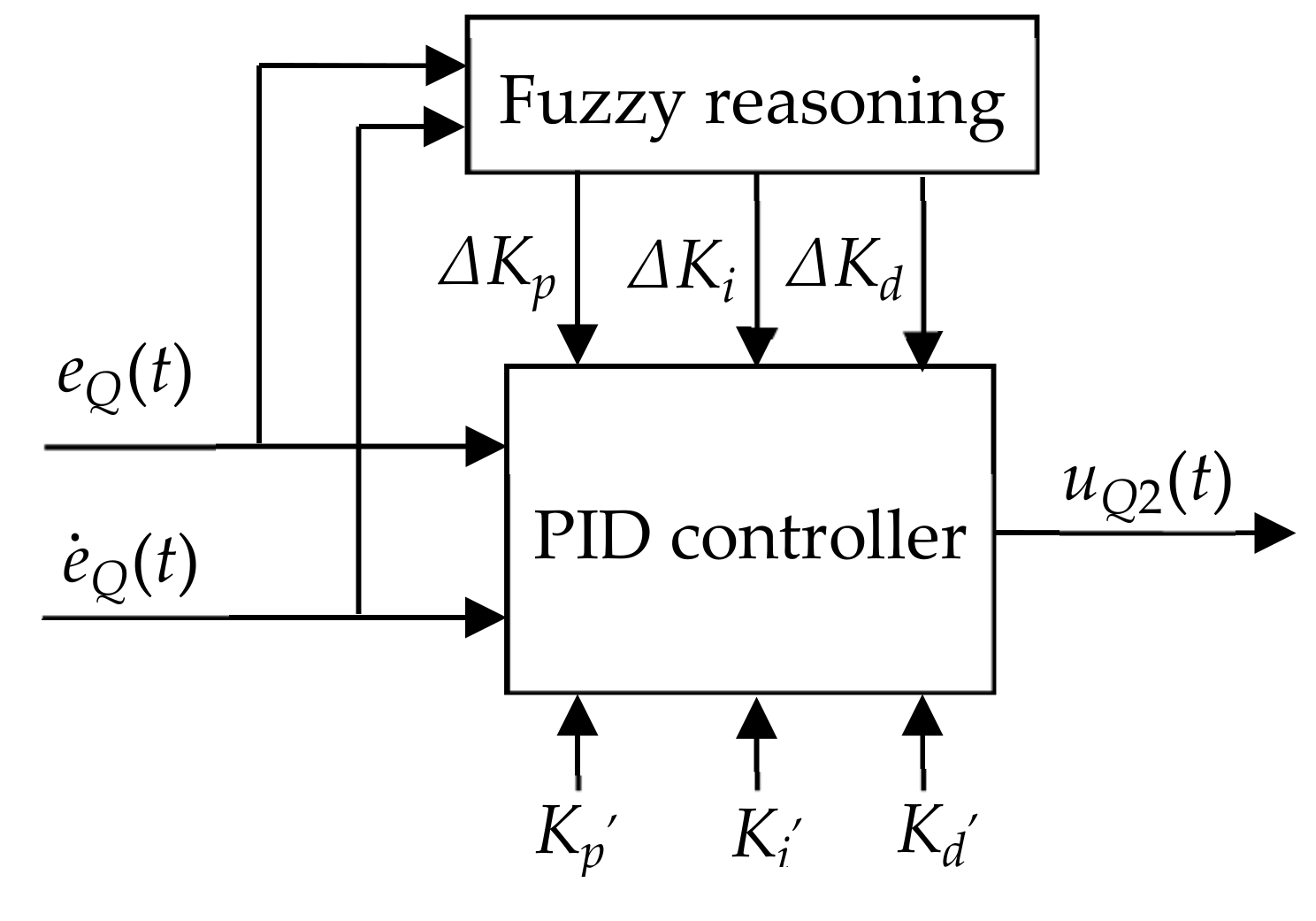
Figure 2, is adaptive fuzzy PID controller and variable domain fuzzy controller. The parameter optimization structure diagram of the controller is shown in
Figure 5. The performance of the controller was determined by the parameters of the controller itself. The parameters of the conventional Bang-Bang control and adaptive fuzzy nonlinear PID control are determined by expert experience. The experience may be quite different from each other owing to the subjective factors of experts themselves. Therefore, it was difficult to ensure that the control system would have better control performance. Chaos is a relatively common phenomenon in nonlinear systems. Chaotic motion is highlighted in ergodicity and randomness. It can traverse all states in a certain range without repeating according to its own laws. This means that we can use chaotic variables as a scientific and feasible way to optimize the parameters of adaptive fuzzy controllers. To this end, this work introduced chaotic variables into the adaptive fuzzy control process for parameter optimization. Firstly, based on the performance indicators of the system, the chaotic variables were used to roughly search for the parameters of the adaptive fuzzy controller, and followed by the refined chaos search. The finally searched parameters of adaptive fuzzy controller were viewed as the global optimal parameter values [
68,
69,
70]. The chaotic parameter optimization flow chart is shown in
Figure 5.
Use logistic map to generate chaotic variables for optimized search by:
where
is a chaotic series, and
μ is a control parameter. When
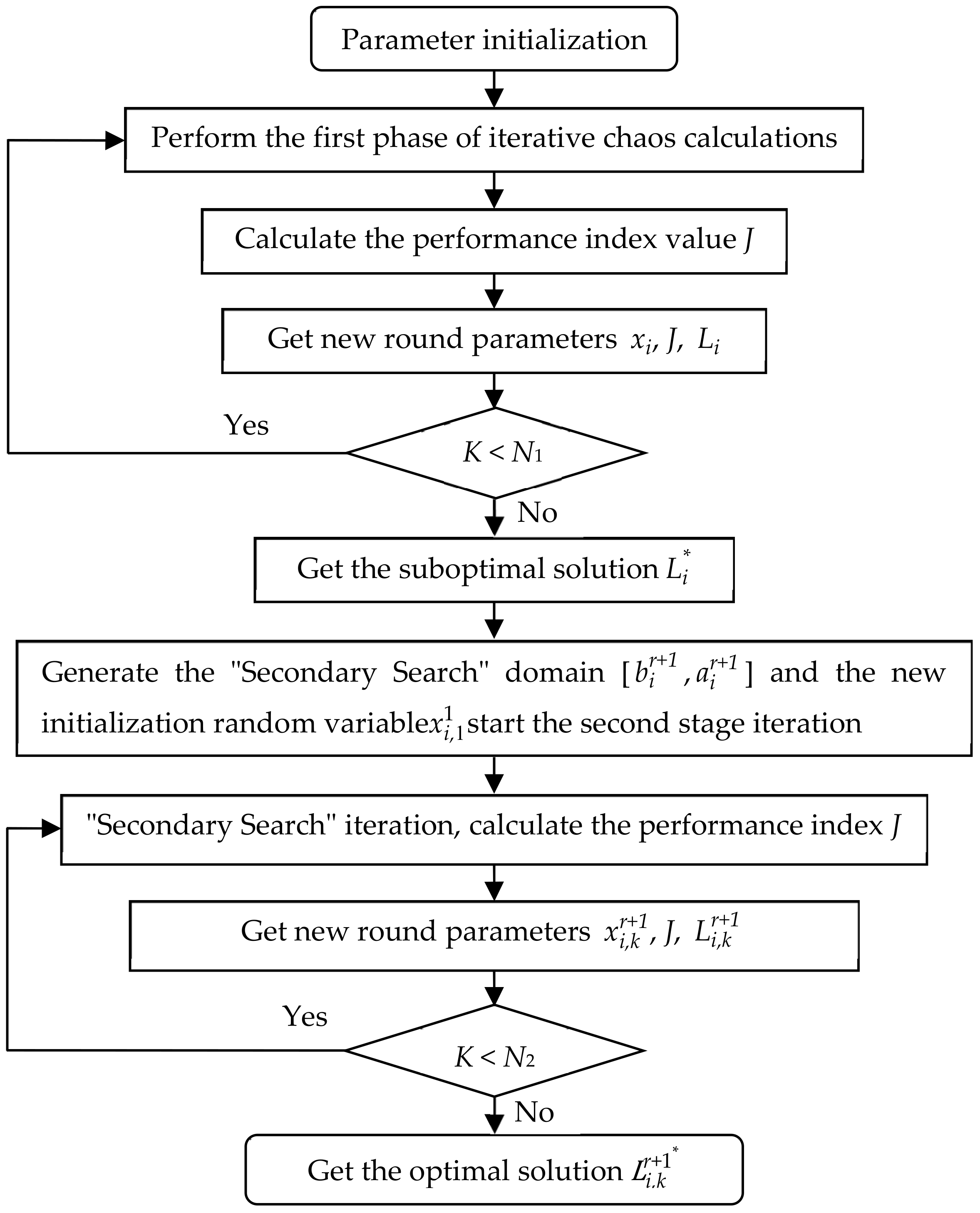
μ = 4, the system is in a chaotic state. The chaos optimization system was set to two cycles, a rough cycle and a fine cycle, where the rough cycle was responsible for finding a suboptimal solution and a fine cycle was performed near the suboptimal solution to find an optimal solution of the spray system.
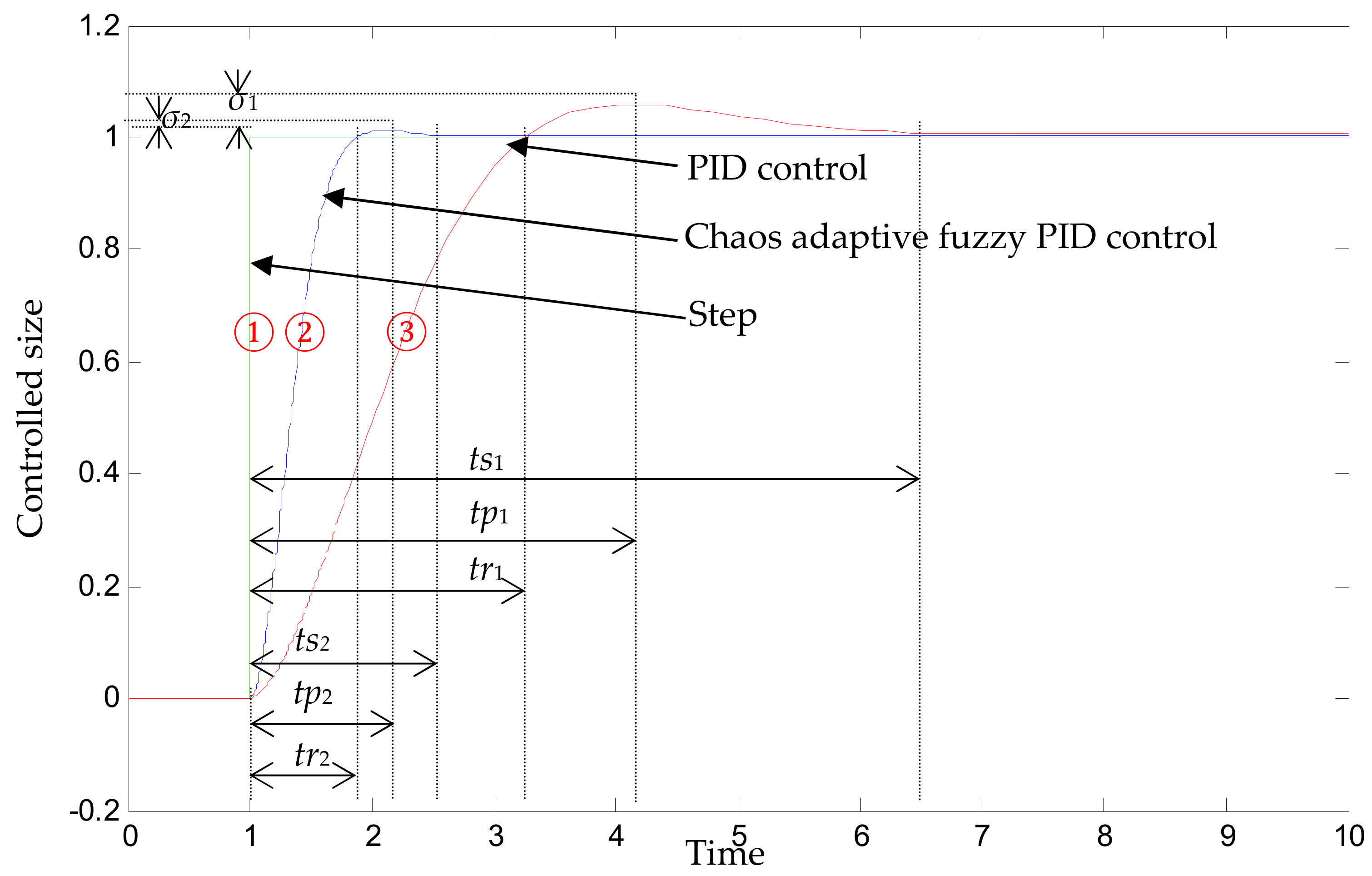
Step 1: Construct an evaluation function. The objective function was designed and optimized according to the ITAE objective function criterion composite with the dynamic and static performance of the comprehensive evaluation control system. When the system overshoot and rise time and error are fully considered, the optimization objective function is designed as:
where
J is the objective function;
are positive weighting factor,
;
σ is the overshoot of the spray system; and
is the rise time of the spray system.
Step 2: initialization parameters and initial value selection. Let the iteration flag of the chaotic variable be K, N1 as the time(s) of coarse search (first search), N2 is the time(s) of fine search (Secondary Search), the controller parameter vector is and the chaos variable corresponding to each parameter is the optimal value of the current chaotic variable is the optimal value of the parameter variable of the current design controller is , and the current optimal objective function value is initialized to a larger number. 6 different values in the (0, 1) interval are the initial values of the chaotic variable . Yet the selection of each initial value must satisfy the relationship .
Step 3: Map the chaos variable domain to the controller parameter domain. Chaos variable
= (
,…,
) has the domain (0,1), compared to the domain of the controller parameter[
,
], where
is the lower limit of the value range of the parameter to be optimized,
is the upper limit of the value range of the parameter to be optimized. Map chaotic variable
through linear transformation to controller parameter domain
by following a mapping relationship, i.e.,
where
L1 to
L14 correspond to parameters
respectively.
Step 4: Find the suboptimal solution in the first cycle. Let the number of rough searches be N1, and the number of loops is K. Each parameter has a chaos trajectory that is taken as initial value of each parameter to be optimized . In a limited number of searching optimizations, the performance indicators of this set of values that meet the performance indicators are compared to achieve the best performance indicators, that is, that number of groups with J as the minimum value is taken as the suboptimal value of each parameter adjustment factor J*. This marks the completion of the rough search for chaos optimization. That is
while k < N1, calculate the performance index J
if , then , ,
, , end
where is the suboptimal value of the chaotic variable, and is the suboptimal value of the parameters of the current design controller, is the current suboptimal objective function value.
Step 5: Narrow down the value range of each variable. In the variable-scale chaos optimization algorithm, there is a need for the search space of the optimization variables to be continuously reduced according to the search process. The variable space reduction coefficient is a parameter representing the degree of reduction of the search space of the optimization variable in each “Secondary Search” process. This work used t to represent it. Where controller parameter domain [
,
] kept narrowed into a domain [
,
], and the specific solution process of this domain is:
where
i indicates the
i-th variable,
r is the number of times of “Secondary Search”,
represents the optimal value, and
,
indicates the upper and lower limits of the of the
i-th variable obtained from the
r-th “Secondary Search”, respectively,
and
indicates the upper and lower limits of the
i-th variable in the
r+1-th “Secondary Search”.
The range of
t in Equation (7) is (0, 0.5), and when the search space is large,
t should take a larger value to ensure the speed of the search. When the search space is small,
t should take a smaller value to ensure the accuracy of the search. Therefore,
t in Equation (7) is designed as:
Step 6: Select the adjustment coefficient for “Secondary Search”. Such adjustment coefficient refers to the fine-tuning value based on the suboptimal point obtained by rough search, and the new chaotic variable is:
The new chaotic variable is used for “Secondary Search”. In this paper, the adjustment coefficient for “Secondary Search” is expressed by α. Among them, k represents the k-th chaotic search; represents the chaotic variable used by the i-th variable in the k-th chaotic search in the r+1-th “Secondary Search”; represents the suboptimal solution of the i-th variable obtained by the r-th search; represents the chaotic variable used by the i-th variable in the k-th chaotic search in the r-th “Secondary Search”.
It can be seen from Equation (7) that α should be a number related to r, the number of times of “Secondary Search”, and the value of α should be a smaller number to ensure that fine-tuning in the vicinity of the suboptimal point. At the same time, as the number of “Secondary Search” increases, the results of optimization will continue to approach the true value, and α should be continuously reduced to ensure the accuracy of the results of optimization.
For this purpose, the determination formula of parameter
α is proposed as:
Step 7: Find the optimal solution in the second cycle. Set
N2 as the number of times of the second cycle of variable-scale chaos search, and take
into the Logistic mapping, and linearly map it to the value interval of the design variables [
,
], where
is the lower limit of the value range of parameter to be optimized in “Secondary Search”,
is the upper limit of the value range of the parameter to be optimized in “Secondary Search”. In the “Secondary Search”, map the chaotic variable
through linear transformation to the controller parameter domain. The corresponding variable is
, and
indicates the controller variable used in the
k-th chaotic search of the
i-th variable in the
r+1-th “secondary search”. The variables in the chaos domain are mapped to the variables in the controller parameter domain and transformed to:
while
k <
N2 calculate the performance indicator
Jif J < J*, then , J* = J, , end
k = k + 1, , end
where is the optimal value of the final chaotic variable, and is the optimal value of the final controller parameter, J* is the final optimal objective function value.
Step 8: Find the optimal solution for the spray system. Repeat Step 5 and optimization ends after several times, and the optimal design variable is
L*, the optimal objective function value is
J*, and the variable spray adaptive fuzzy controller parameters have reached the optimal. The flow chart of chaos optimization algorithm based on variable scale is shown in
Figure 6.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}