Analysis of the Position Recognition of the Bucket Tip According to the Motion Measurement Method of Excavator Boom, Stick and Bucket

 ,
,
Abstract
1. Introduction
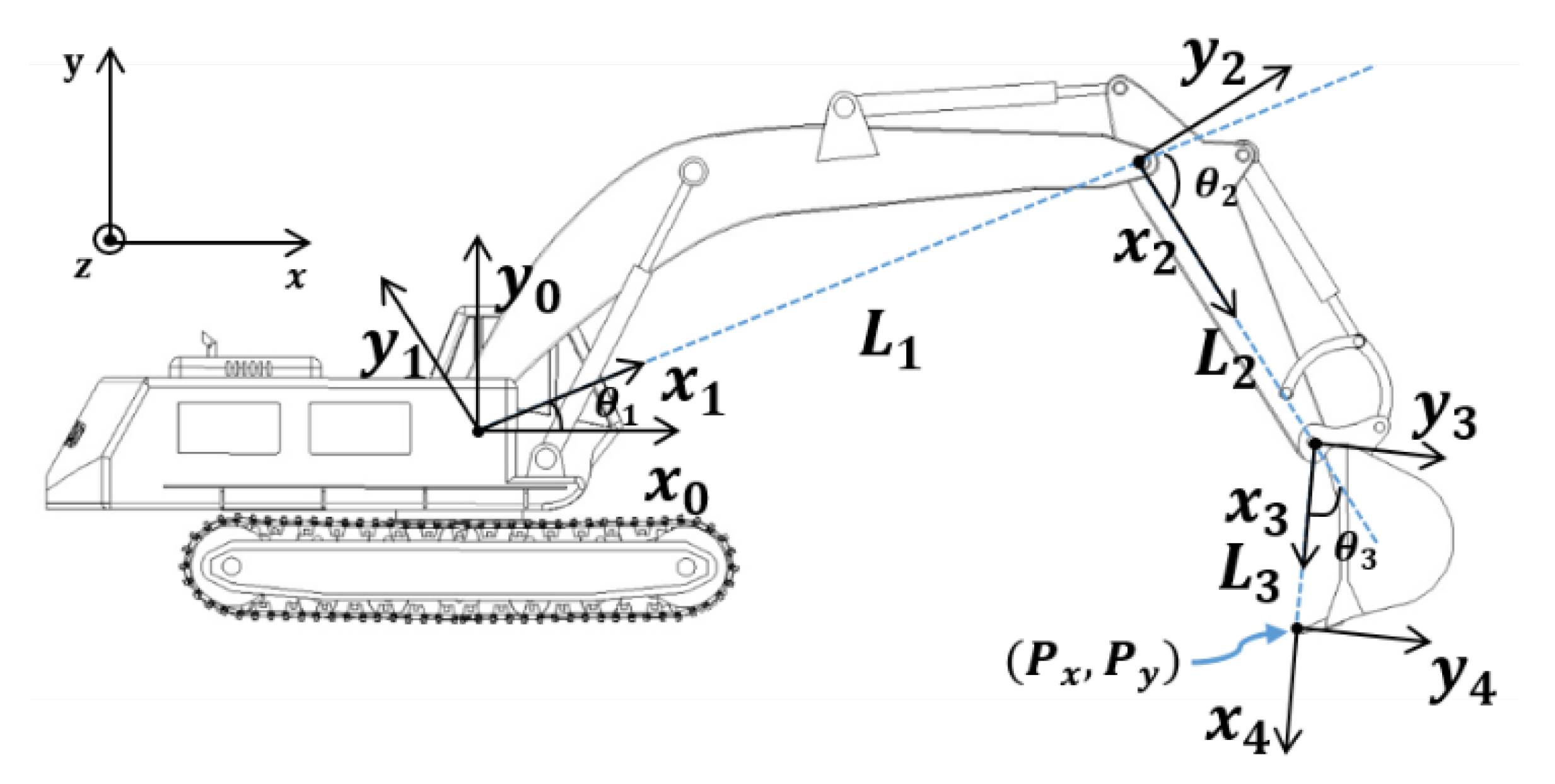
2. Kinematic Modeling of the Excavator
2.1. Forward Kinematics: Revolute Joint
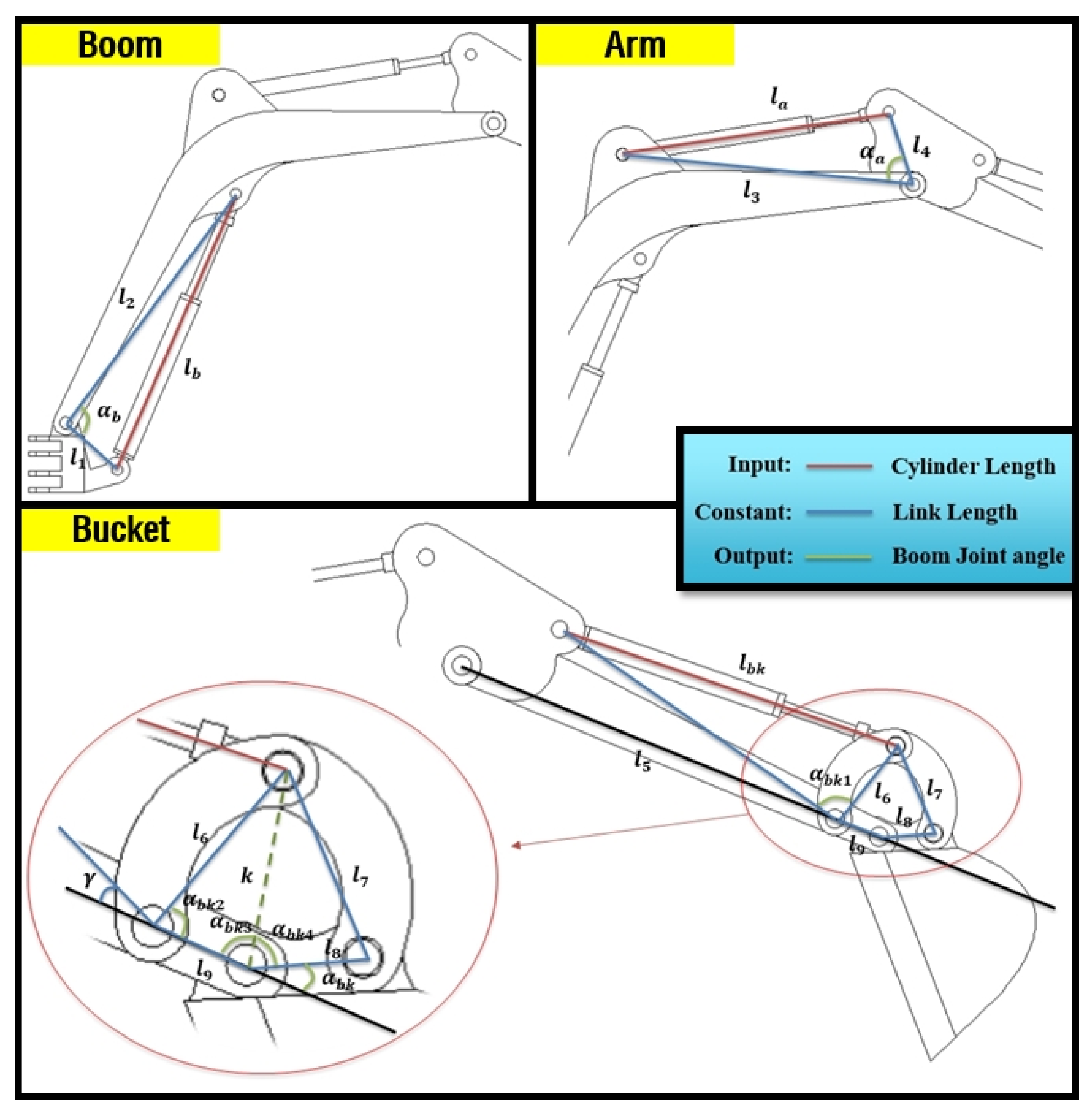
2.2. Forward Kinematics: Cylinder Length
3. System Setup for Validation
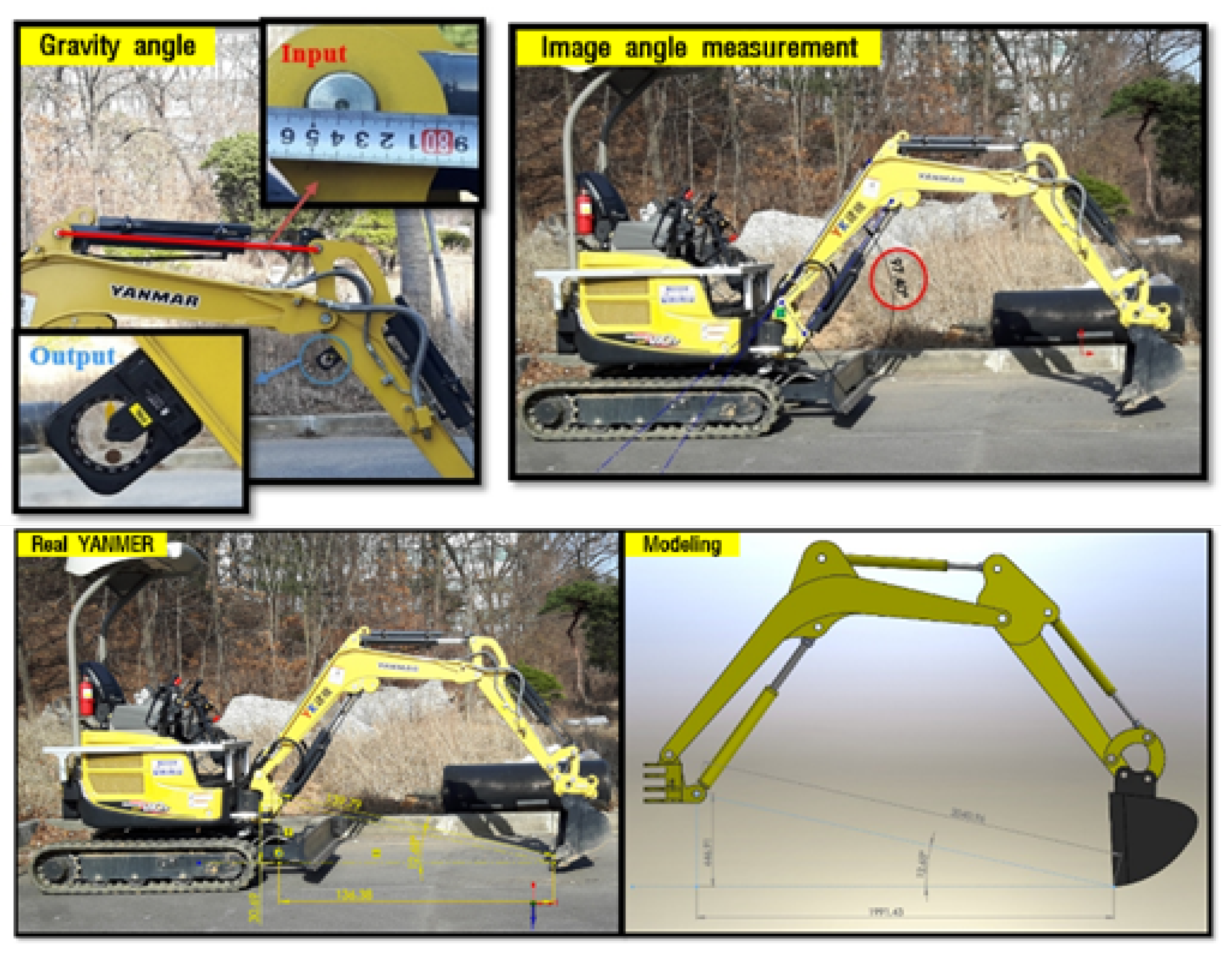
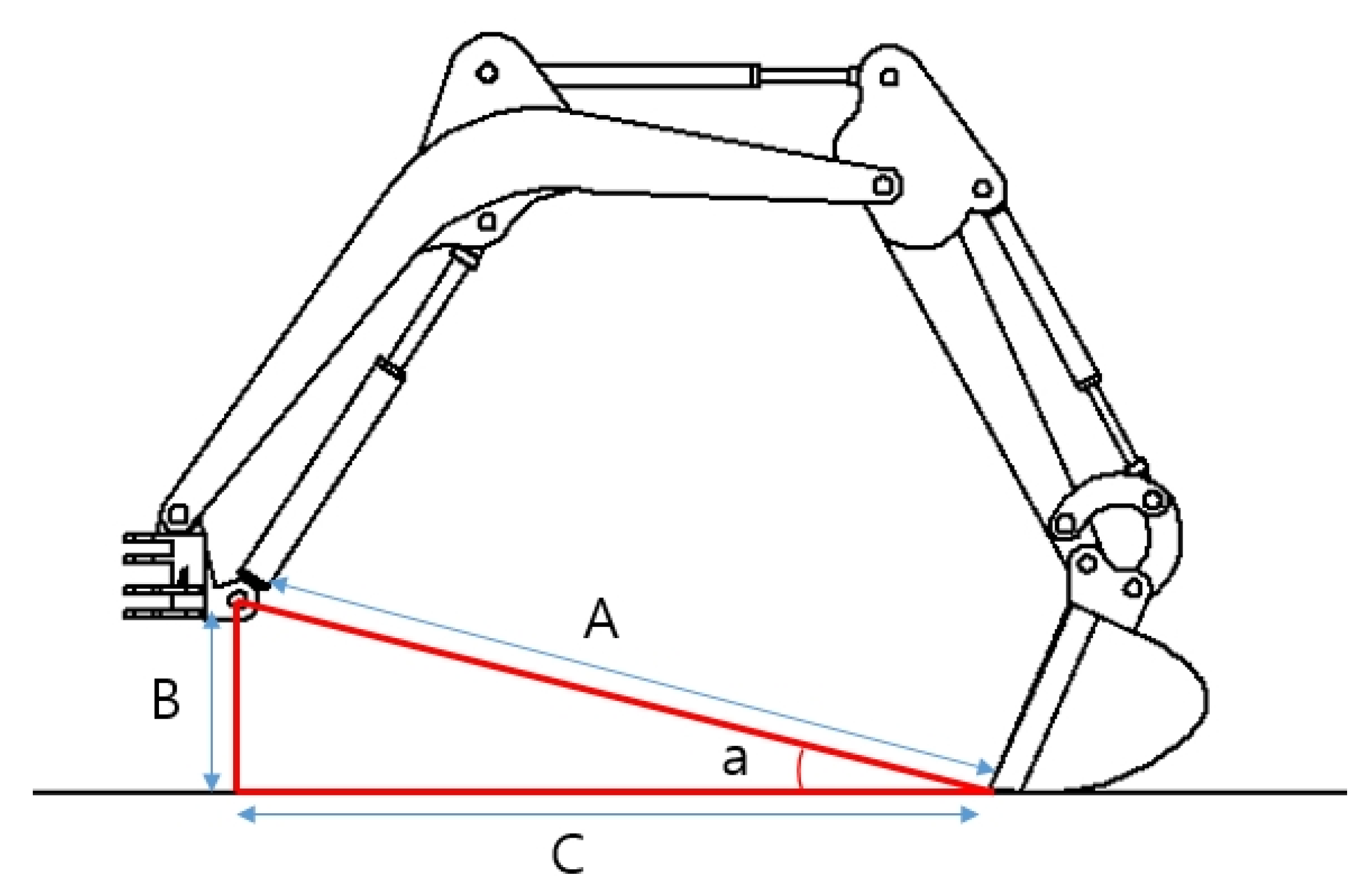
3.1. Verification of the Derived Kinematic Equations
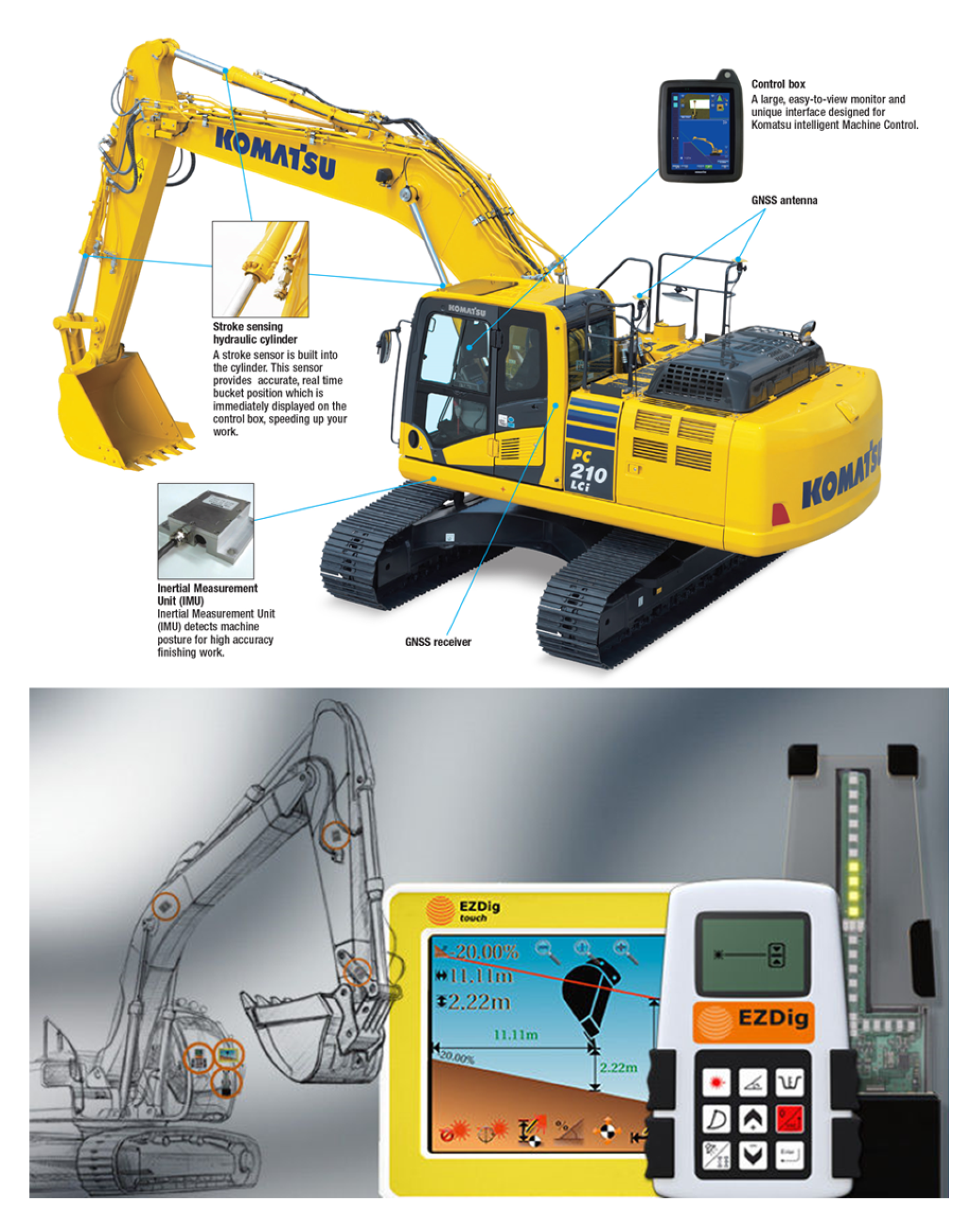
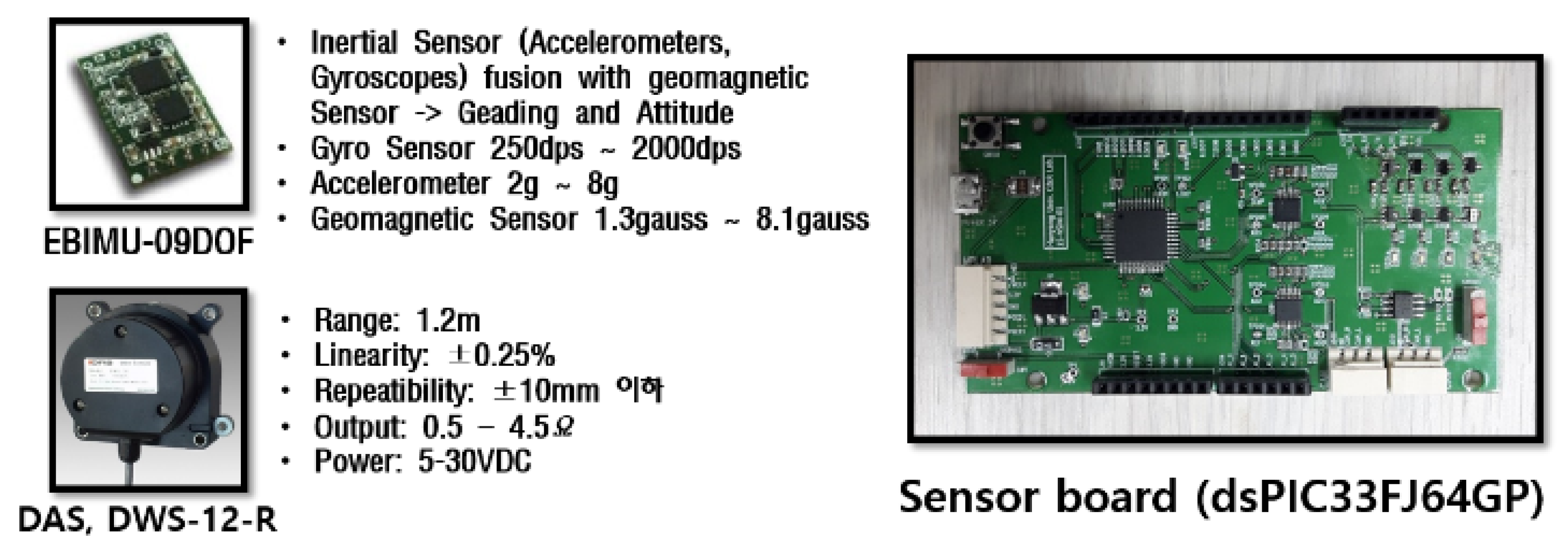
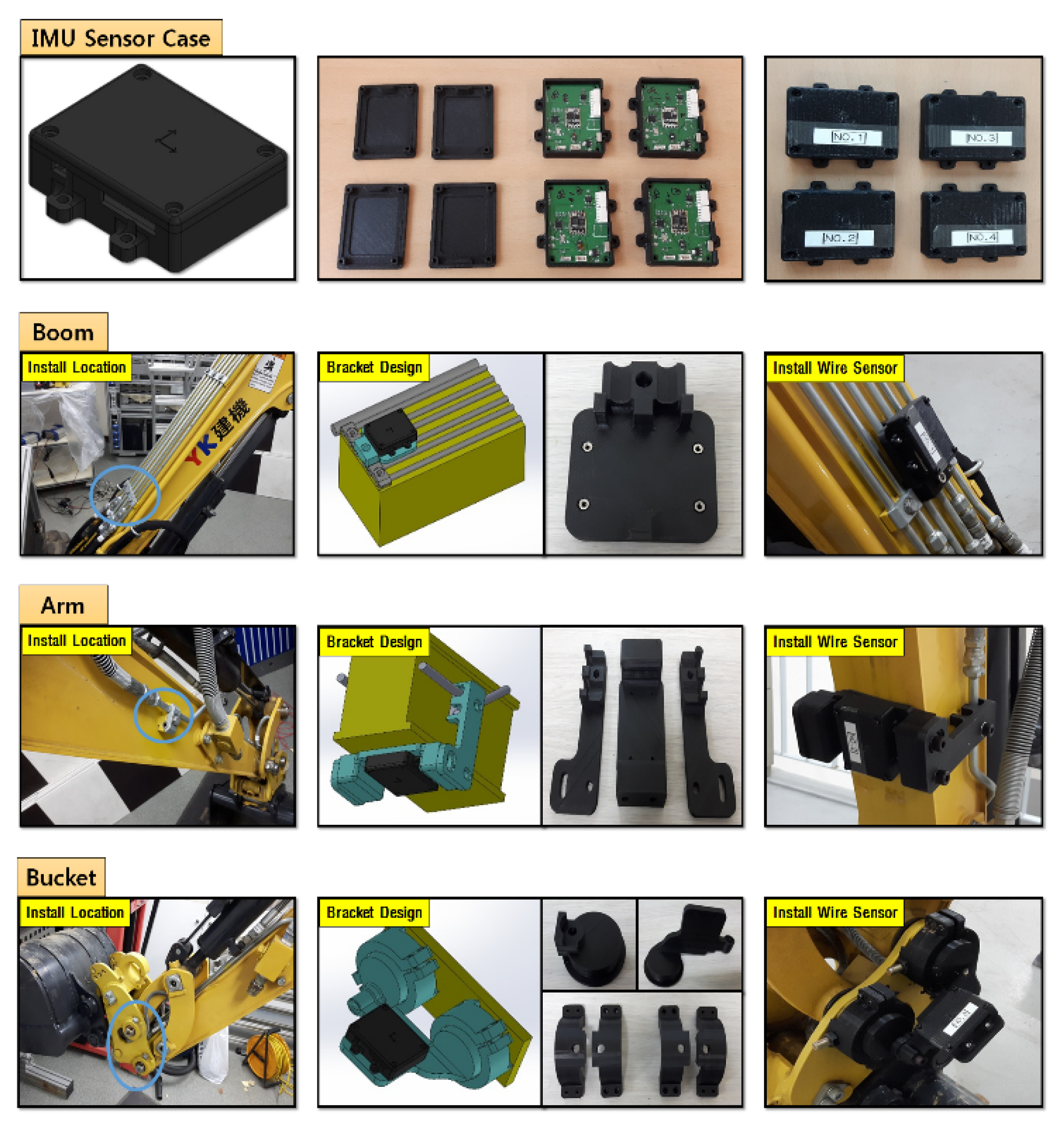
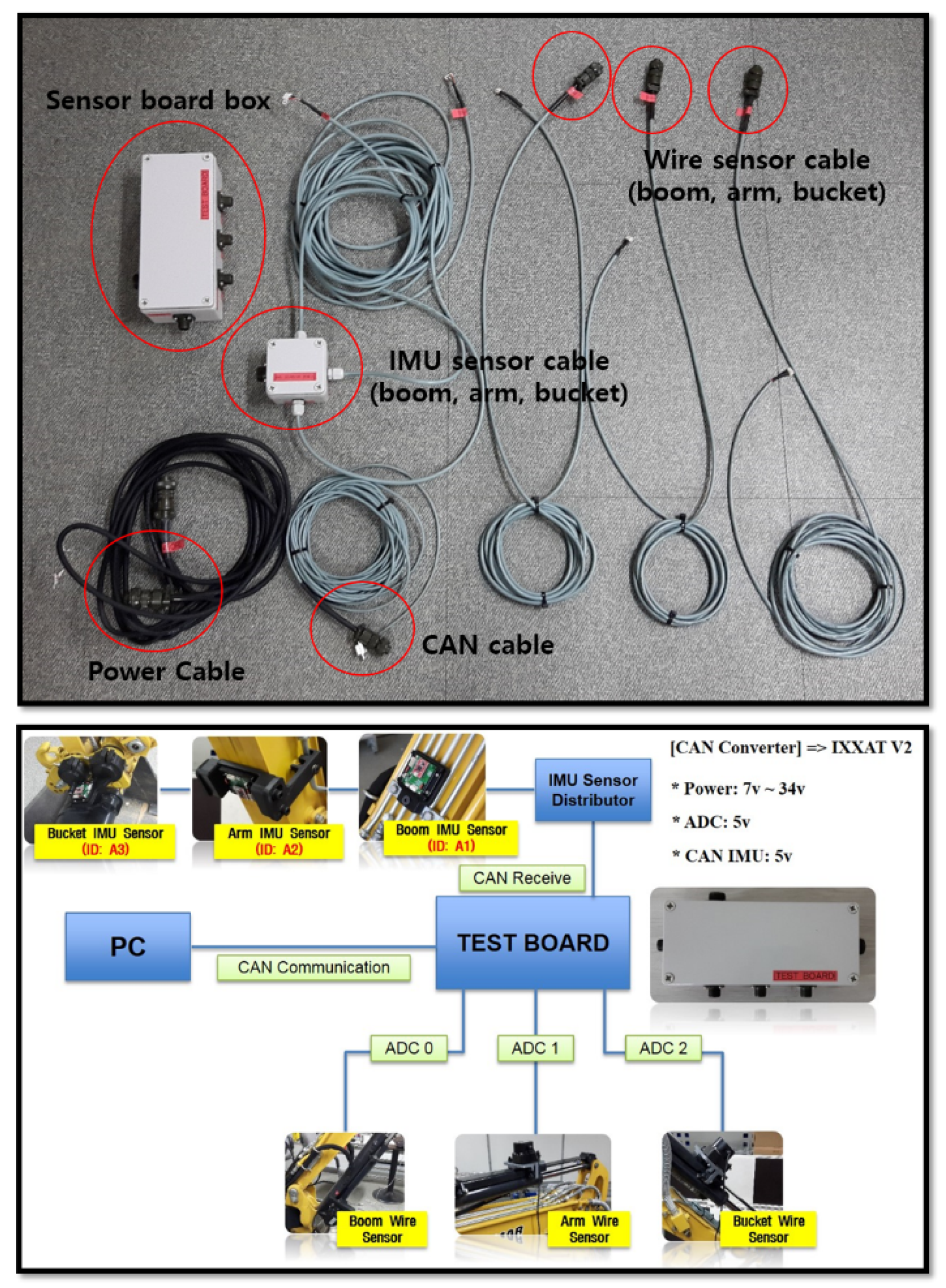
3.2. Construction of the Sensor System
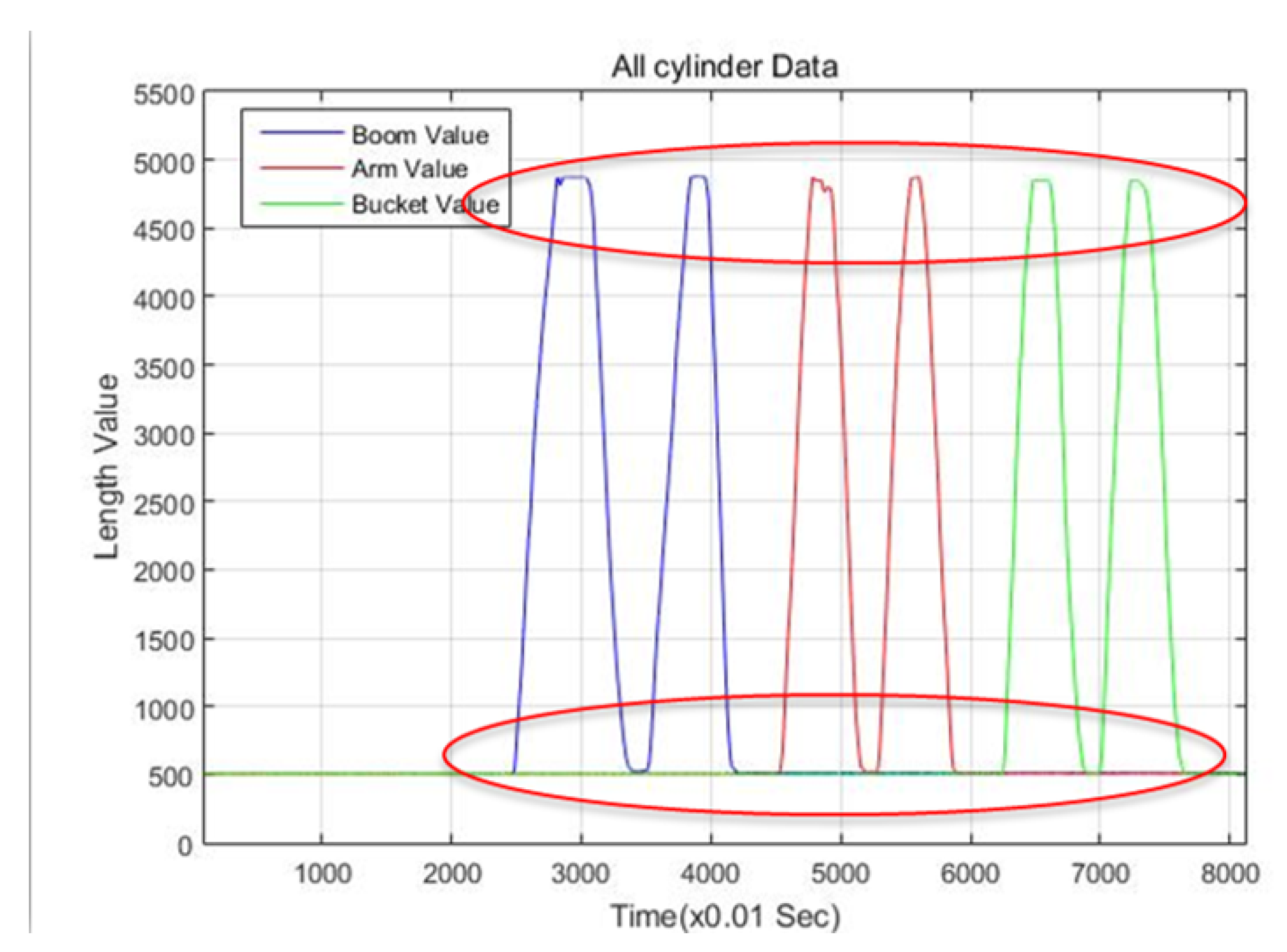
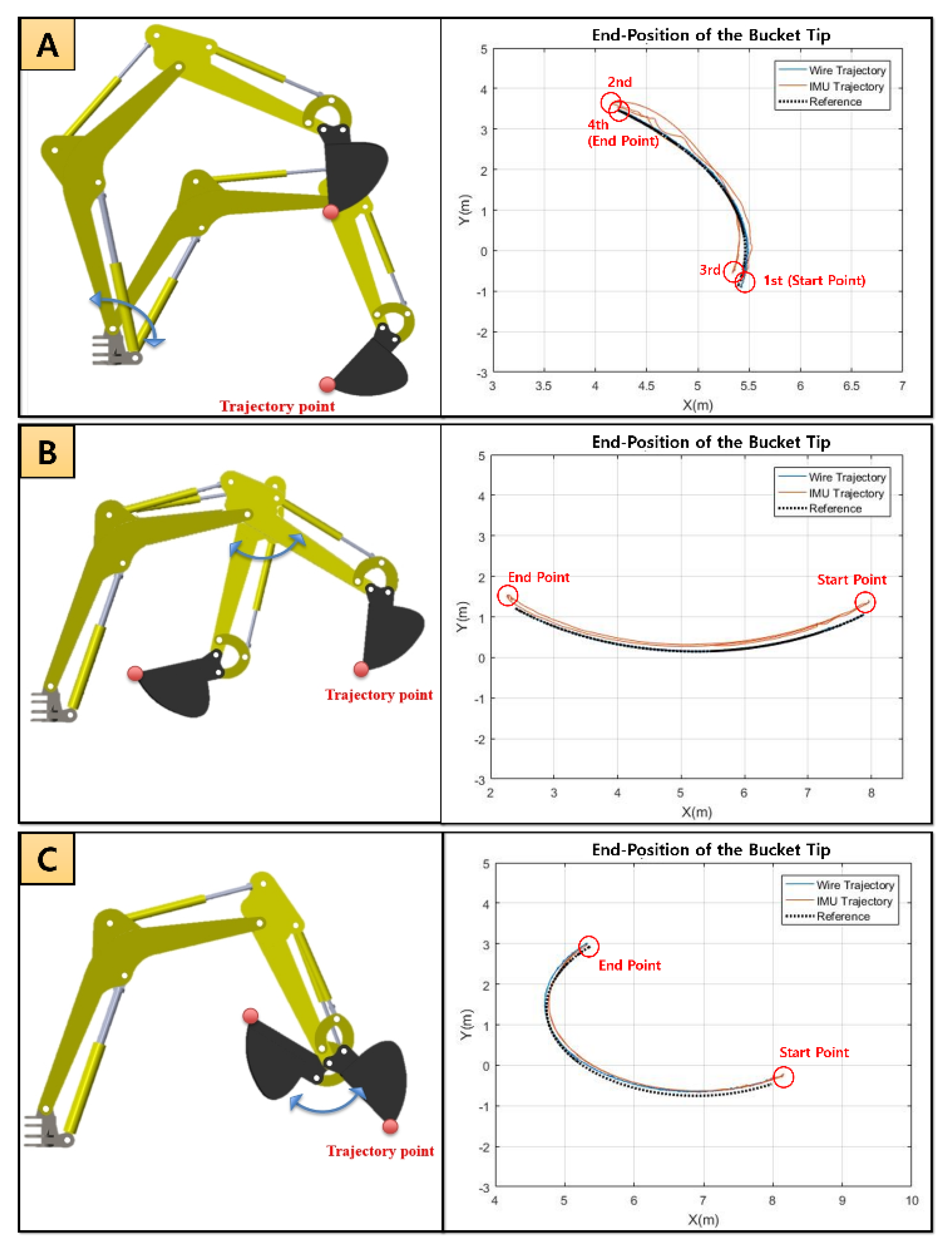
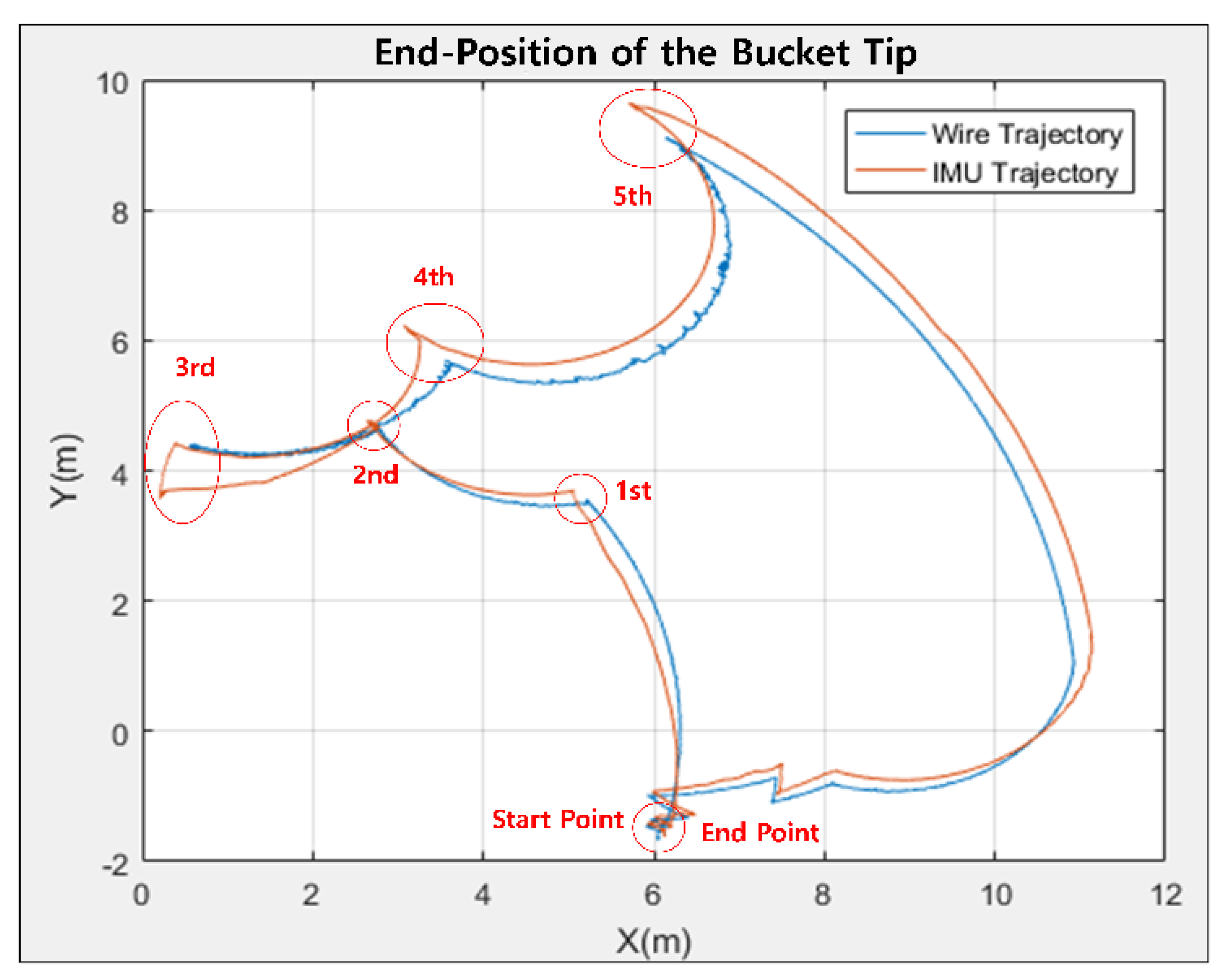
4. Experiments and Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| , , and | link angles for foreword kinematics |
| , , and | link lengths for foreword kinematics |
| Bucket Tip of x-axis position | |
| Bucket Tip of x-axis position | |
| sin() | |
| cos() | |
| sin( + ) | |
| cos( + ) | |
| sin( + + ) | |
| cos( + + ) | |
| and | link lengths for boom cylinder kinematics |
| and | link lengths for arm cylinder kinematics |
| , , , , and | link lengths for Bucket cylinder kinematics |
| boom cylinder length | |
| stick cylinder length | |
| bucket cylinder length | |
| boom angle by cylinder input. |
References
- Lee, Y.B.; Lo, J.M.; Kim, T.S. Development of The Position Control Cylinder for Hydraulic Excavator. Available online: http://www.dbpia.co.kr/journal/articleDetail?nodeId=NODE00915478 (accessed on 19 May 2020).
- Jeong, Y.M.; Yang, S.Y. Application case of Sensor System Development for Excavator Automation. Korea Fluid Power Syst. Soc. 2015, 12, 77–81. [Google Scholar]
- Lee, M.C.; Lee, M.H.; Choi, Y.J.; Yang, S.Y.; Yoon, K.S. On development of stroke sensing cylinder for automatic excavator. In Proceedings of the IEEE International Symposium on Industrial Electronics, Dubrovnik, Croatia, 10–14 July 1995; Volume 1, pp. 363–368. [Google Scholar]
- Masakazu, H.; Watanabe, H.; Kazuo, F. Digging control system for hydraulic excavator. Mechatronics 2001, 11, 665–676. [Google Scholar]
- Kim, D.; Kim, J.; Lee, K.; Park, C.; Song, J.; Kang, D. Excavator tele-operation system using a human arm. Autom. Constr. 2009, 18, 173–182. [Google Scholar] [CrossRef]
- Vahdatikhaki, F.; Hammad, A.; Siddiqui, H. Optimization-based excavator pose estimation using real-time location systems. Autom. Constr. 2015, 56, 76–92. [Google Scholar] [CrossRef]
- Murakami, T.; Kato, M.; Ota, M. Precision Angle Sensor Unit for Construction Machinery; SAE International: Warrendale, PA, USA, 1997. [Google Scholar]
- Xu, J.; Yoon, H.S. Vision-based estimation of excavator manipulator pose for automated grading control. Autom. Constr. 2019, 98, 122–131. [Google Scholar] [CrossRef]
- Vladeanu, A.; Vladeanu, G. The displacement of excavator bucket on the optimum trajectory through the control of hydraulic cylinders lengths. Roman. J. Tech. Sci. 2017, 62, 105–117. [Google Scholar]
- Ghassemi, F.; Tafazoli, S.; Lawrence, P.D.; Hashtrudi-Zaad, K. An accelerometer-based joint angle sensor for heavy-duty manipulators. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; Volume 2, pp. 1771–1776. [Google Scholar]
- Chang, P.H.; Lee, S.J. A straight-line motion tracking control of hydraulic excavator system. Mechatronics 2002, 12, 119–138. [Google Scholar] [CrossRef]
- Wind, H.; Renner, A.; Schaut, S.; Albrecht, S.; Sawodny, O. Comparison of joint angle, velocity and acceleration estimators for hydraulically actuated manipulators to a novel dynamical approach. Control Eng. Pract. 2019, 91, 104118. [Google Scholar] [CrossRef]
- Feng, H.; Yin, C.B.; Weng, W.W.; Ma, W.; Zhou, J.J.; Jia, W.H.; Zhang, Z.L. Robotic excavator trajectory control using an improved GA based PID controller. Mech. Syst. Signal Process. 2018, 105, 153–168. [Google Scholar] [CrossRef]
- Im, S.; Choi, S.Y.; Lee, J.B. Autonomous traction control for the intelligent excavator system. In Proceedings of the 28th International Symposium on Automation and Robotics in Construction, Seoul, Korea, 29 June–2 July 2011. [Google Scholar]
- Schmidt, D.; Proetzsch, M.; Berns, K. Simulation and control of an autonomous bucket excavator for landscaping tasks. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 5108–5113. [Google Scholar]
- Okishiba, S.; Fukui, R.; Takagi, M.; Azumi, H.; Warisawa, S.I.; Togashi, R.; Ooi, T. Tablet interface for direct vision teleoperation of an excavator for urban construction work. Autom. Constr. 2019, 102, 17–26. [Google Scholar] [CrossRef]
- Shimano, Y.; Kami, Y.; Shimokaze, K. Development of PC210LCi-10/PC200i-10 Machine Control Hydraulic Excavator. Available online: https://home.komatsu/en/company/tech-innovation/report/pdf/167-E01.pdf (accessed on 17 May 2020).
- Kim, J.H.; Bae, J.H.; Jung, W.Y. A Study on Position Recognition of Bucket Tip for Excavator. J. Drive Control 2014, 13, 49–53. [Google Scholar] [CrossRef]
- Kim, J.; Jin, M.; Choi, W.; Lee, J. Discrete time delay control for hydraulic excavator motion control with terminal sliding mode control. Mechatronics 2019, 60, 15–25. [Google Scholar] [CrossRef]
- Zhang, X.; Qiao, S.; Quan, L.; Ge, L. Velocity and Position Hybrid Control for Excavator Boom Based on Independent Metering System. IEEE Access 2019, 7, 71999–72011. [Google Scholar] [CrossRef]
- Kim, S.H.; Lee, Y.S.; Sun, D.I.; Lee, S.K.; Yu, B.H.; Jang, S.H.; Kim, W.; Han, C.S. Development of bulldozer sensor system for estimating the position of blade cutting edge. Autom. Constr. 2019, 106, 102890. [Google Scholar] [CrossRef]
- Sekizuka, R.; Ito, M.; Saiki, S.; Yamazaki, Y.; Kurita, Y. System to Evaluate the Skill of Operating Hydraulic Excavators Using a Remote Controlled Excavator and Virtual Reality. Available online: https://www.frontiersin.org/articles/10.3389/frobt.2019.00142/full (accessed on 19 May 2020).
- Kim, K.; Kim, M.; Kim, D.; Lee, D. Modeling and velocity-field control of autonomous excavator with main control valve. Automatica 2019, 104, 67–81. [Google Scholar] [CrossRef]
- Wind, H.; Jenisch, L.; Renner, A.; Bender, F.A.; Sawodny, O. Design of an Adaptive Velocity Controller for a Hydraulic Mini Excavator using a Moving-Horizon-Estimator. In Proceedings of the 2019 IEEE Conference on Control Technology and Applications (CCTA), Hong Kong, China, 19–21 August 2019; pp. 685–690. [Google Scholar]
- Lee, J.; Kim, B.; Sun, D.; Han, C.; Ahn, Y. Development of Unmanned Excavator Vehicle System for Performing Dangerous Construction Work. Sensors 2019, 19, 4853. [Google Scholar] [CrossRef]
- Liang, C.J.; Lundeen, K.M.; McGee, W.; Menassa, C.C.; Lee, S.; Kamat, V.R. A vision-based marker-less pose estimation system for articulated construction robots. Autom. Constr. 2019, 104, 80–94. [Google Scholar] [CrossRef]
- Sun, D.; Hwang, S.; Kim, B.; Ahn, Y.; Lee, J.; Han, J. Creation of One Excavator as an Obstacle in C-Space for Collision Avoidance during Remote Control of the Two Excavators Using Pose Sensors. Remote Sens. 2020, 12, 1122. [Google Scholar] [CrossRef]
- Bae, J.; Lee, C.S.; Hong, D. Avoidance of Earth obstacles for intelligent excavator. In Proceedings of the 28th ISARC, Seoul, Korea, 29 June–2 July 2011; pp. 1184–1189. [Google Scholar]
- Galetakis, M.; Vafidis, A.; Kritikakis, G.; Deligiorgis, V. Automatic detection of unmineable inclusions while bucket wheel excavator digging, using electromagnetic (EM) sensor and GPS. Górnictwo Odkrywkowe 2018, 59, 7–15. [Google Scholar]
- Kim, J.C.; Yoo, S.; Kim, M.; Kim, Y.J.; Lee, G.H. Safety Control of Automatic Excavator for Swing Collision Avoidance. In Proceedings of the 2018 15th International Conference on Ubiquitous Robots (UR), Honolulu, HI, USA, 26–30 June 2018; pp. 758–762. [Google Scholar]
- Meng, L.; Peng, Z.; Zhou, J.; Zhang, J.; Lu, Z.; Baumann, A.; Du, Y. Real-Time Detection of Ground Objects Based on Unmanned Aerial Vehicle Remote Sensing with Deep Learning: Application in Excavator Detection for Pipeline Safety. Remote Sens. 2020, 12, 182. [Google Scholar] [CrossRef]
- Yang, S.Y.; Lee, M.C.; Lee, M.H.; Arimoto, S. Development of digital stroke sensing cylinder and its performance evaluation. Robotica 1996, 14, 687–694. [Google Scholar] [CrossRef]
- Melander, L.; Ritala, R.; Strandström, M. Classifying soil stoniness based on the excavator boom vibration data in mounding operations. Silva Fennica 2019, 53, 10068. [Google Scholar] [CrossRef]
- Shi, Y.; Xia, Y.; Zhang, Y.; Yao, Z. Intelligent identification for working-cycle stages of excavator based on main pump pressure. Autom. Constr. 2020, 109, 102991. [Google Scholar] [CrossRef]
- Chen, C.; Zhu, Z.; Hammad, A.; Ahmed, W. Vision-Based Excavator Activity Recognition and Productivity Analysis in Construction. In Proceedings of the ASCE International Conference on Computing in Civil Engineering 2019: Data, Sensing, and Analytics, Atlanta, GA, USA, 17–19 June 2019; pp. 214–248. [Google Scholar]
- Yang, S.Y.; Lee, M.C.; Lee, M.H.; Arimoto, S. Measuring system for development of stroke-sensing cylinder for automatic excavator. IEEE Trans. Ind. Electron. 1998, 45, 376–384. [Google Scholar] [CrossRef]
- Niskanen, I.; Immonen, M.; Makkonen, T.; Keränen, P.; Tyni, P.; Hallman, L.; Heikkilä, R. 4D modeling of soil surface during excavation using a solid-state 2D profilometer mounted on the arm of an excavator. Autom. Constr. 2020, 112, 103112. [Google Scholar] [CrossRef]
- Taghvaeeyan, S.; Rajamani, R.; Arimoto, S. Magnetic sensor-based large distance position estimation with disturbance compensation. IEEE Sens. J. 2015, 15, 4249–4258. [Google Scholar] [CrossRef]
- Choi, S.W.; Kim, Y.S.; Yang, S.Y. A Review on the Sensor System of the Next Generation Construction Machinery. J. Drive Control 2018, 15, 80–88. [Google Scholar]
- Yang, S.S.; Jin, S.M.; Choi, J.J.; Lee, C.D.; Kim, Y.S. A Study on Tracking Control of Remote Operated Excavator for Field Robot. Trans. Korea Fluid Power Syst. Soc. 2009, 6, 68–74. [Google Scholar]
- Jean, S.M. Development of the Remote Control Excavator System Using the Adaptive Sliding Mode Control. Ph.D. Thesis, Automotive and Vessel Technology, University of Ulsan, Ulsan, Korea, 2009. [Google Scholar]
- Ji, C.U. Study on Front Motion Control of Hydraulic Excavator Equipped with Installation-Type Robot Manipulator. Master’s Thesis, Department of Mechanical Engineering, Hanyang University, Seoul, Korea, 2017. [Google Scholar]
- Craig, J.J. Introduction to Robotics Mechanics and Control, 3rd ed.; Pearson: London, UK, 2014; pp. 41–180. [Google Scholar]
- Kim, N.G. Human Motion Tracking based on 3D Depth Point Matching with Super ellipsoid Body Model. J. Dig. Contents Soc. 2012, 13, 255–262. [Google Scholar] [CrossRef]
- Nam, D.K.; Park, J.Y.; Park, H.W.; Kim, D.Y. Some Observations on Drift-Reduction Methods for Low-cost Gyro Sensors. Korean Inst. Intell. Syst. 2010, 29, 103–105. [Google Scholar]
- Ji, C.U.; Han, C.S.; Gil, M.S.; Kang, M.S.; Jang, S.H. The Study on Stabilized Estimation Method of Real-Time Bucket Trajectory for Remote Excavation System. Available online: http://www.dbpia.co.kr/journal/articleDetail?nodeId=NODE06692853 (accessed on 19 May 2020).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cylinder Length | Link Motion | Revolute Joint | Hydraulic | Other | |
|---|---|---|---|---|---|
| (Indirect Joint Angle) | (Direct) | Parameters | |||
| Guidance | [3]-Magnetic | [4]-Inclination | [3]-Rotary | [5]-Hydraulic | [6]-RTLS |
| and | [4]-Stroke | [7]-Angle sensor | [4]-Tilt | motor | [8]-Vision |
| Control | [9]-Magnetic | [10]-Accelerometer | [11]-Potentiometer | [12]-Pressure | |
| [13]-Draw wire | [14]-IMU | [15]-Rotary encoder | |||
| [16]-Draw wire | [17,18]-IMU | [19]-Potentiometer | |||
| [20]-Stroke | [21]-IMU | [22]-Potentiometer | |||
| [23]-Stroke | [24]-IMU | ||||
| [25]-IMU | |||||
| [26]-IMU | |||||
| [27]-IMU | |||||
| Planning | [28]-Stroke | [29]-Magnetic | [30]-Laser | ||
| (LVDT) | Scanner | ||||
| [31]-Vision | |||||
| Other | [32]-Stroke | [33]-IMU | [34]-Pressure | [35]-Vision | |
| [36]-Stroke | [37]-IMU | ||||
| [38]-magnetic |
| i | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | |
| 2 | 0 | 0 | ||
| 3 | 0 | 0 | ||
| 4 | 0 | 0 | 0 |
| Length (mm) | |||
|---|---|---|---|
| Real Measurement | Model Gauge | Err | |
| Diagonal length (A) | 2029 | 2041 | 12 |
| Horizontal length (B) | 1979 | 1991 | 12 |
| Height (C) | 447 | 448 | 1 |
| Average Err (cm) | Closed-Trajectory (m2) | ||||
|---|---|---|---|---|---|
| Sensor | Axis | Boom | Stick | Bucket | Trajectory Area |
| Draw-wire | x axis | 0.6 | 0.2 | 0.6 | 38.71 |
| Sensor | y axis | 0.9 | 0.9 | 0.9 | |
| IMU | x axis | 5.1 | 7.0 | 5.1 | 43.995 |
| Sensor | y axis | 7.5 | 6.0 | 7.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, D.; Ji, C.; Jang, S.; Lee, S.; No, J.; Han, C.; Han, J.; Kang, M. Analysis of the Position Recognition of the Bucket Tip According to the Motion Measurement Method of Excavator Boom, Stick and Bucket. Sensors 2020, 20, 2881. https://doi.org/10.3390/s20102881
Sun D, Ji C, Jang S, Lee S, No J, Han C, Han J, Kang M. Analysis of the Position Recognition of the Bucket Tip According to the Motion Measurement Method of Excavator Boom, Stick and Bucket. Sensors. 2020; 20(10):2881. https://doi.org/10.3390/s20102881
Chicago/Turabian StyleSun, Dongik, Changuk Ji, Sunghoon Jang, Sangkeun Lee, Joonkyu No, Changsoo Han, Jeakweon Han, and Minsung Kang. 2020. "Analysis of the Position Recognition of the Bucket Tip According to the Motion Measurement Method of Excavator Boom, Stick and Bucket" Sensors 20, no. 10: 2881. https://doi.org/10.3390/s20102881
APA StyleSun, D., Ji, C., Jang, S., Lee, S., No, J., Han, C., Han, J., & Kang, M. (2020). Analysis of the Position Recognition of the Bucket Tip According to the Motion Measurement Method of Excavator Boom, Stick and Bucket. Sensors, 20(10), 2881. https://doi.org/10.3390/s20102881