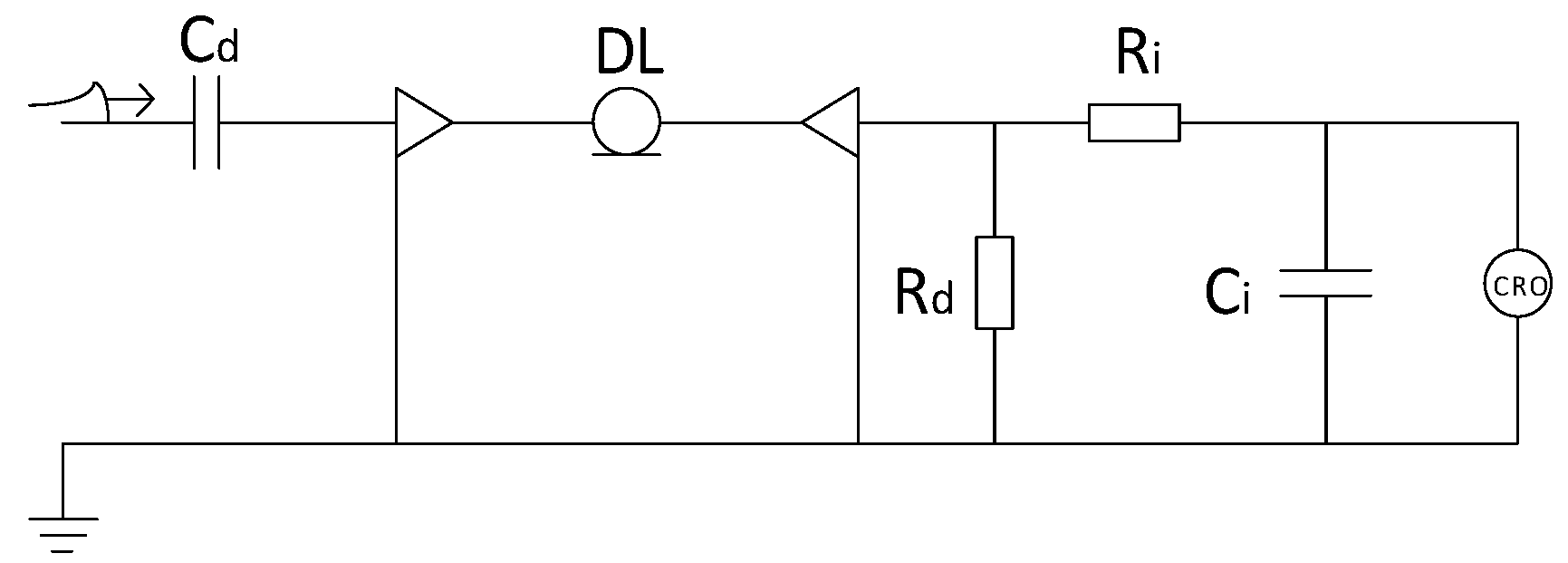
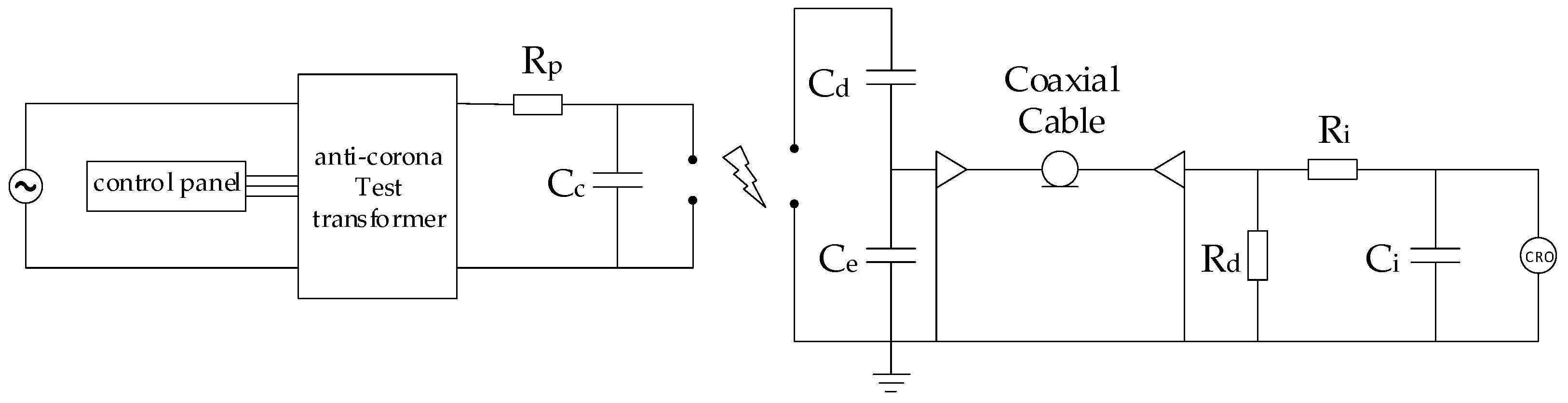
2.1. Principle of Differentiating–Integrating Measurement
The principle of the classic differentiating–integrating measurement system is shown in
Figure 1, where
and
constitute a passive first-order integral unit,
and
constitute a differential unit, DL is the coaxial cable, the backend CRO is an oscilloscope and the internal resistance and capacitance of the oscilloscope are ignored.
also serves as the matching resistor at the end of the coaxial cable, and its value is the same as characteristic impedance of coaxial cable, much smaller than the equivalent capacitive reactance formed by
. The differential capacitor
is a high voltage component. In the conventional basin insulator wraparound electrode differentiating–integrating measurement method,
is the high voltage capacitor formed by the measuring electrode and the HV busbar.
The front-end sensor is the differentiator, and the output is a differential signal, which needs to be restored by the integrator and output to the oscilloscope. The integrator can be selected using a passive integrator, an active integrator or a better performing hybrid integrator depending on the measurement accuracy requirements of the instrument used.
According to the model above, the voltage transfer function of this circuit can be described as
where
is the derivative time constant and
is the integral time constant. Thus, voltage division ratio can be described as
To ensure adequate measurement accuracy, it is required that
where
is the equivalent frequency of measured voltage.
The step response time of the classical differentiating–integrating measurement system can be described as
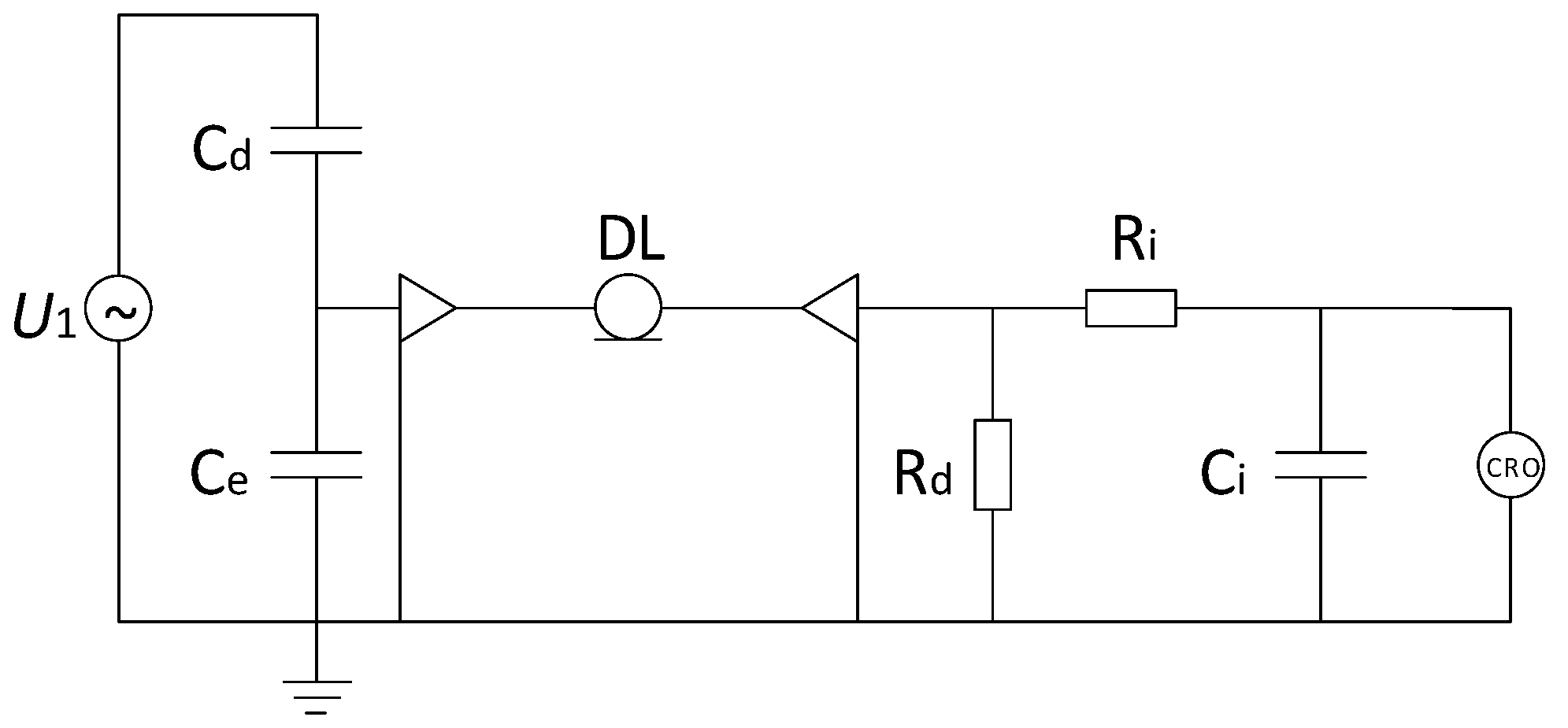
In the actual measurement, capacitance and inductance of the coaxial cable cannot be ignored, and the electromagnetic environment of the substation is complex. Uncertain factors such as stray capacitance and residual inductance make the components of the integral and differential parts non-ideal, and these factors will affect the measurement system. As a result, structure and components of the differentiator and integrator need to be modified to eliminate the stability degradation caused by the high frequency characteristics of the device. Besides, the equivalent frequency of the VFTO measurement is low, whether it will take influence has yet to be verified, in order to simplify the modeling and parameter calculation, the uncertain factors is ignored. However, the above simplified model ignores the capacitance formed by the sensor’s induction plate and the shielding layer, and the stray capacitance formed by the sensor to the ground. Adding stray capacitance
to the model, the equivalent circuit of the differentiating–integrating measurement system according to the actual situation is shown in
Figure 2.
The transfer function of this circuit can be described as
Thus, the voltage division ratio is
The step response time can be described as
It can be concluded from the above that the step response time of the measurement system is related to the stray capacitance caused by the differential capacitance, differential resistance and sensor structure design difference. According to the capacitance definition formula, if the sensor has a large area to the ground, the stray capacitance between the sensor housing and the ground will be affected by the height of the installed GIS, and the sensor parameters will change, resulting in measurement errors.
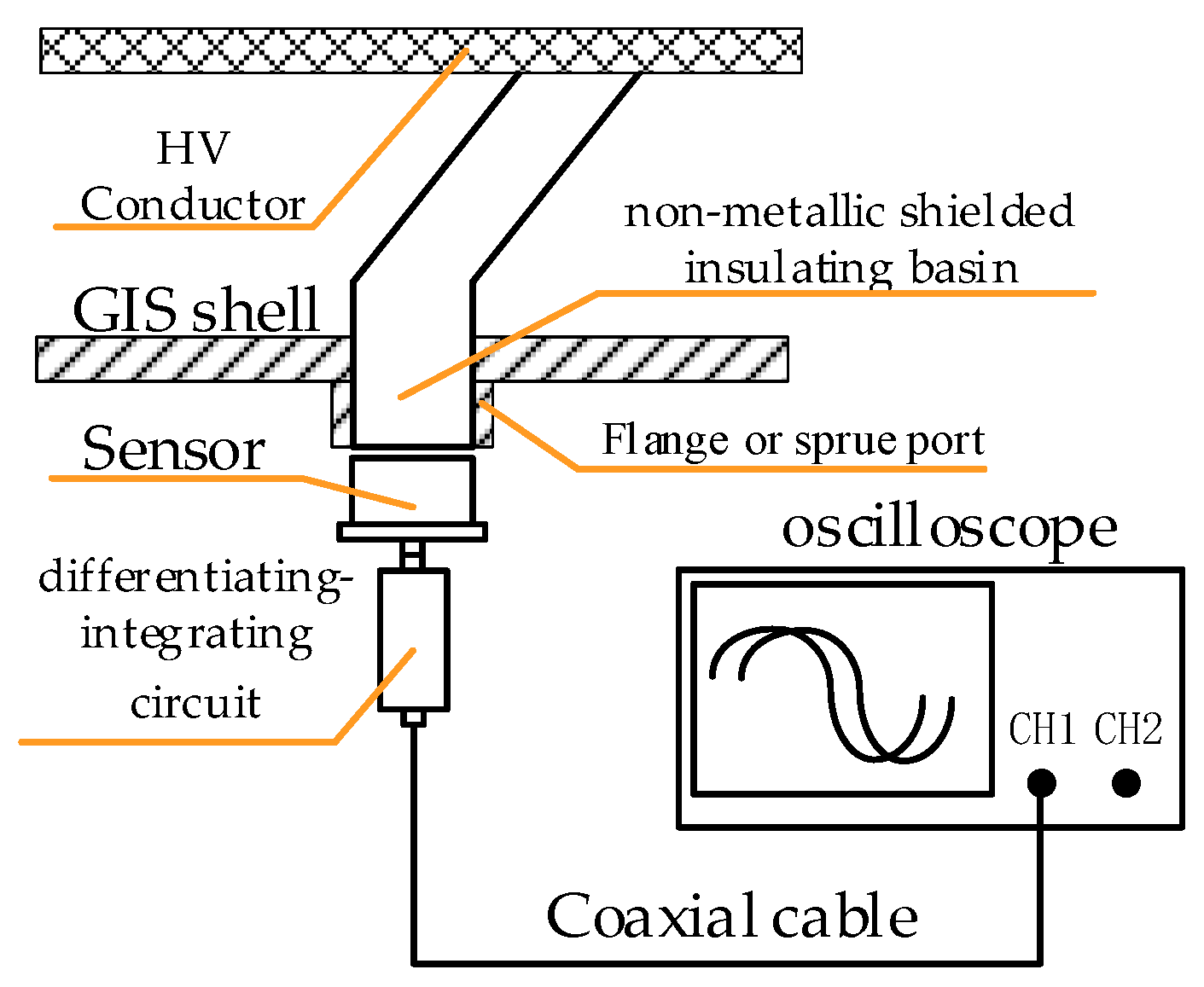
2.2. Sensor Parameter Design
According to the VFTO waveform characteristics and IEC TS 61321-1, the overall step response time of the measurement system should be within 5 ns, and the low frequency response should be lower than the power frequency. The high frequency characteristics of the measurement system are determined by the differential part, and the low frequency characteristics are determined by the integral part, which puts higher requirements on the differential and integral parts of the measurement system.
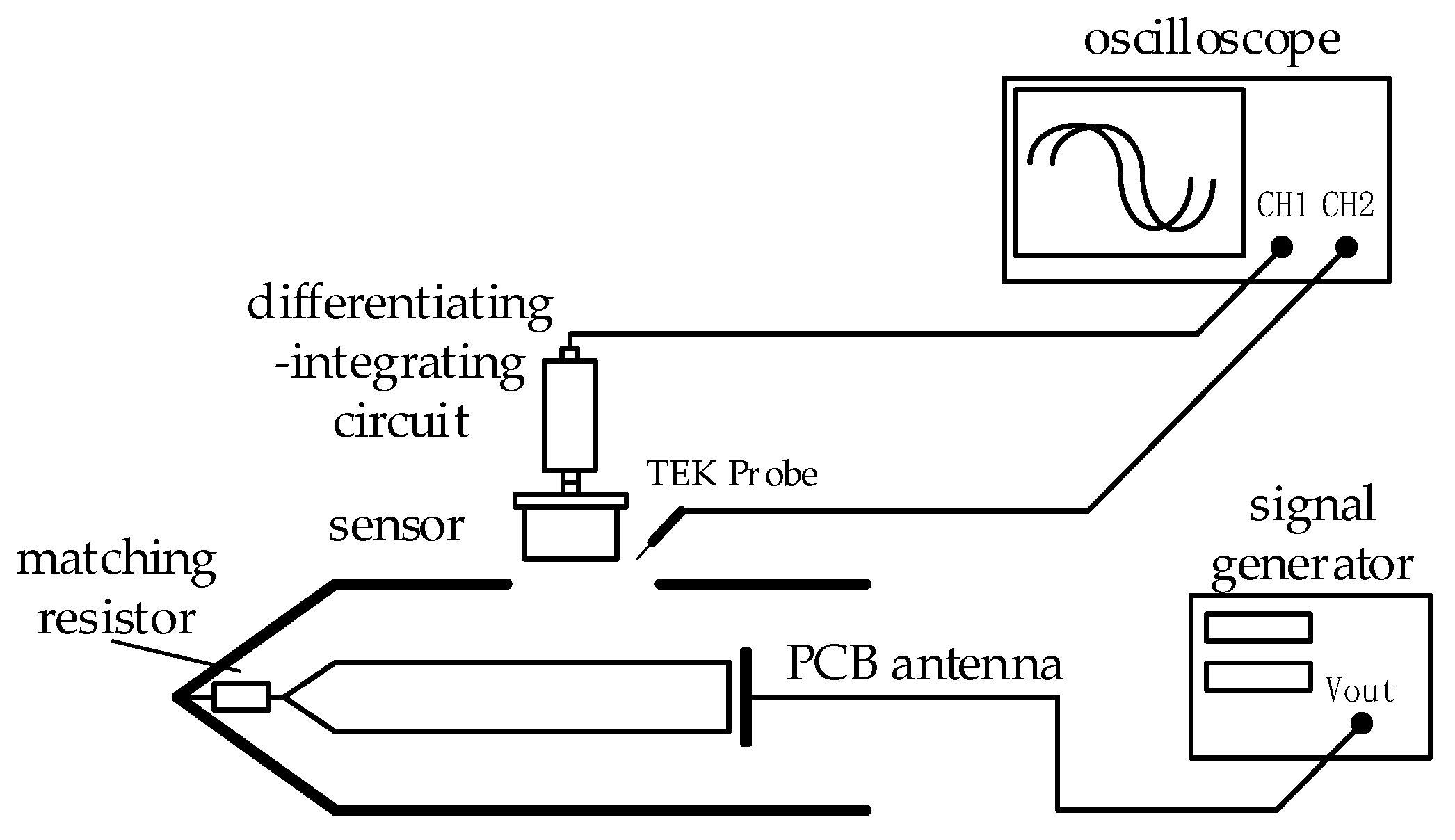
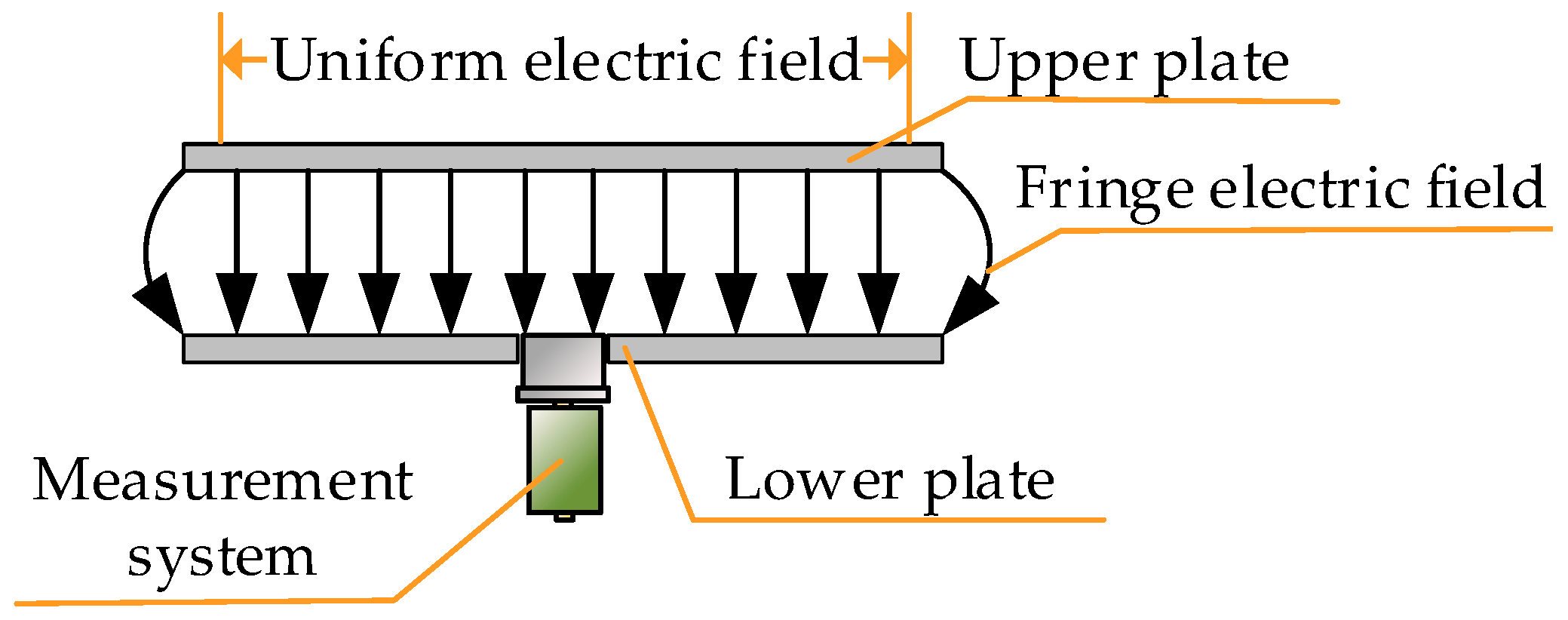
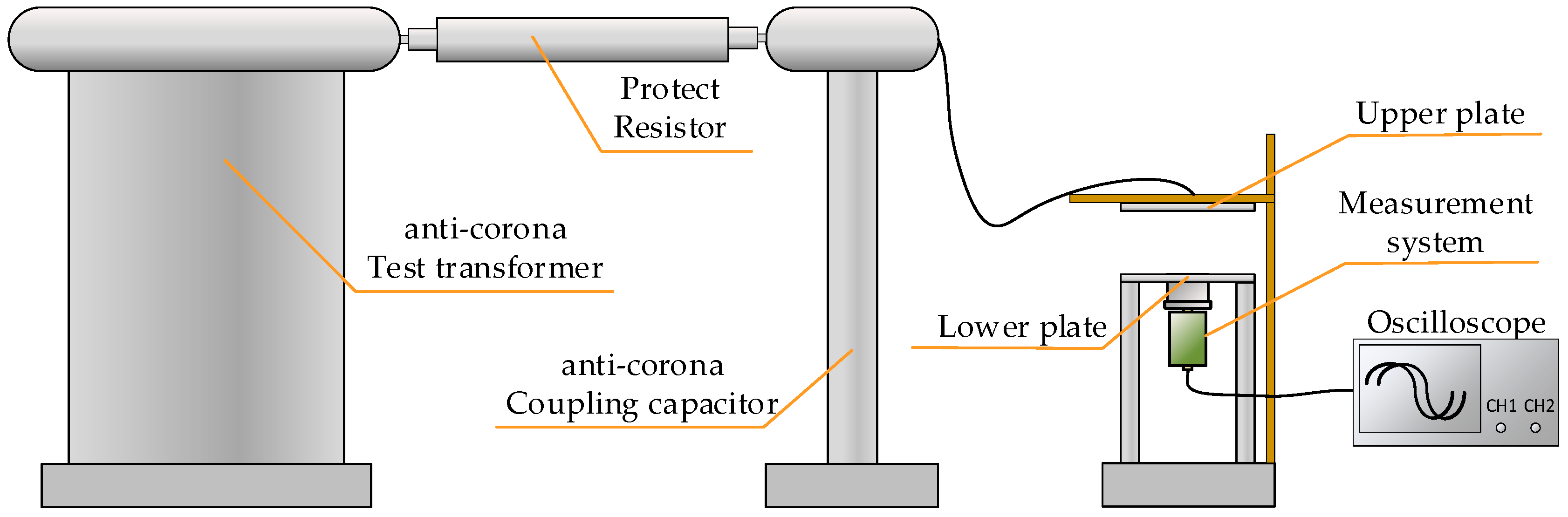
First, the design of the differential part is performed. The basic structure of the external measurement system for measuring VFTO is shown in
Figure 3. The front end is a capacitive voltage divider. Differentiating–integrating circuit is directly connected to the sensor and connected to the oscilloscope through a coaxial cable with a 50 Ω impedance. Set the oscilloscope to 50 Ω to match the matching resistor in the calculus circuit to eliminate the buckling reflection in the cable when transmitting transient signals.
We have come to the conclusion that the sensor of the measuring system needs to have two cavities to form and , whether the sensor of the measuring system is installed on the non-metallic shielded insulating basin, the sprue gate or the observation window, the capacitance of the ground stray capacitance relative to the capacitance of the sensor cavity must be ignored, which requires reducing the projected area of the sensor to the ground.
The outside of the sensor can be designed to be round or rectangular, but the round sensor is difficult to fix when installed in the field, so we chose a rounded rectangle for design. and need to be implemented through the sensor structure. The sensor is designed as a circular cavity, and it is cut into two circular cavities by using induction plates to implement and . Designed as a circular shape can increase the induction area, the volume is reduced as much as possible when the cavity capacitance is fixed, and the loss is small compared to the rectangular cavity. However, because the high-frequency and low-frequency characteristics of the sensor are not exactly the same, when designing the cavity of and , the internal cavity of the sensor cannot be directly divided according to the capacitance.
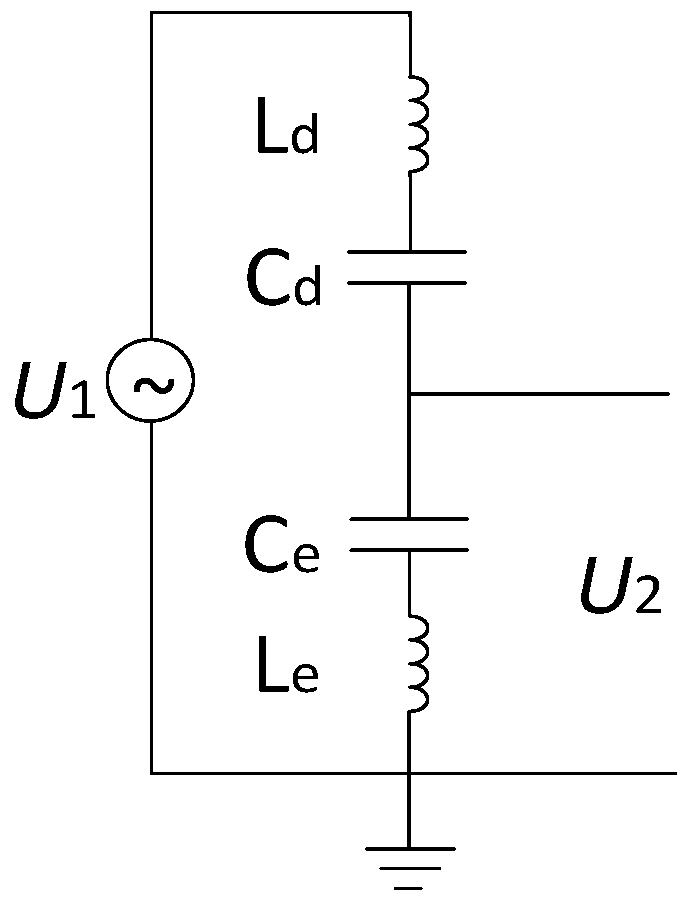
When designing the high-frequency parameters of the measurement system, the capacitance sensor cannot be regarded as a simple voltage divider, and there is stray inductance affected by the sensor structure. The actual equivalent model is shown in
Figure 4. We can derive the transfer function as follows
The resonant frequency of the branch to the differential capacitor
and the branch to the ground capacitor
can be described as
From Equations (8)–(10), we have
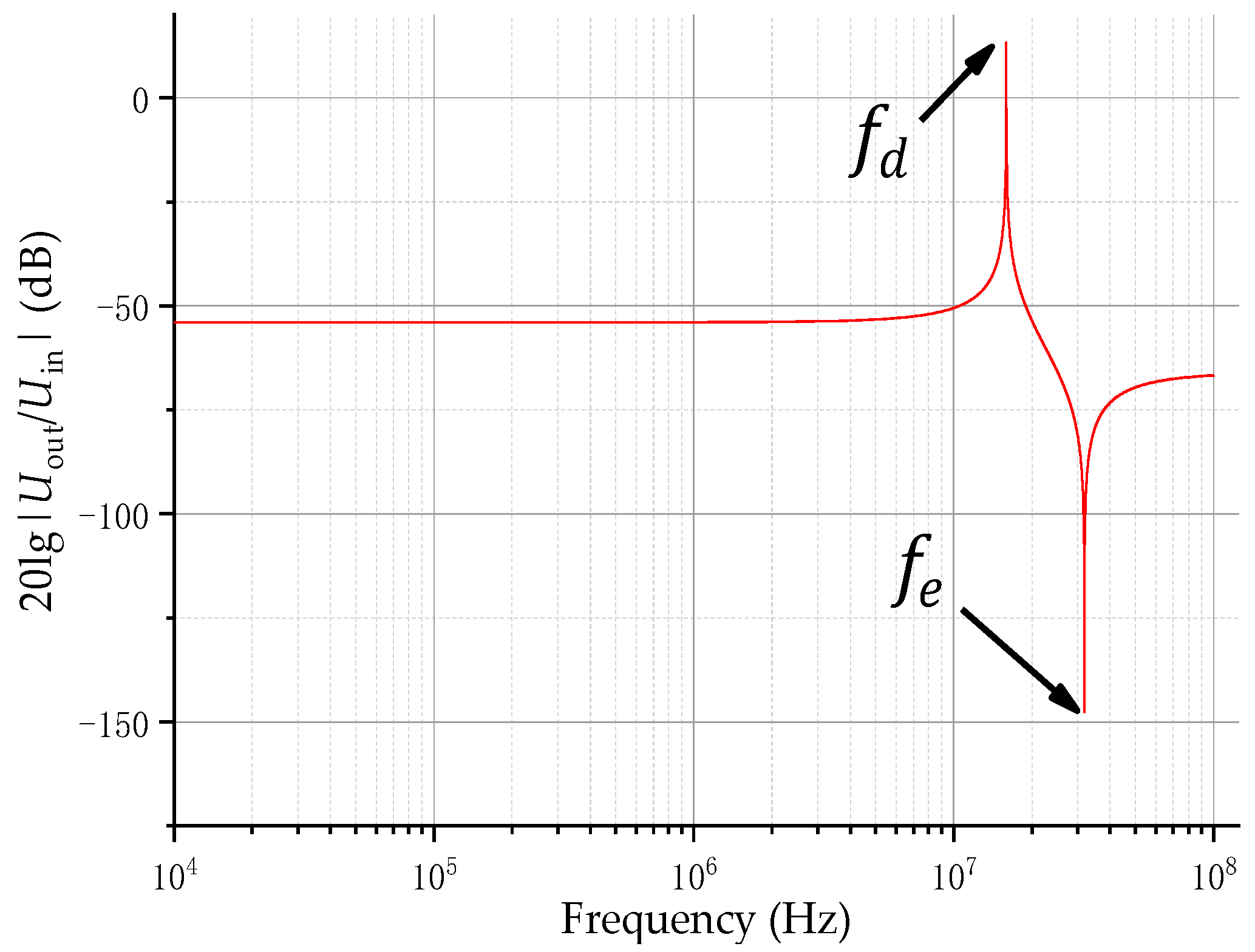
In order to study the characteristics of the transfer function, assuming that
,
,
, and
, and the plotted frequency response is as shown in
Figure 5. In the figure, the ordinate is the transfer coefficient in decibels, and the abscissa is the frequency. The figure consists of two poles
and
, which are the poles and zeros of the transfer function, respectively. When the measured frequency
,
is connected in series with
, and forms a series resonant circuit with
, engendering voltage of
is much larger than
, and even higher than 0 dB under certain parameter settings, which make
greater than
, causing transient high voltage impact on the integral part and the measuring instrument, damaging the device. When the measured frequency
,
and
form a series resonant circuit, the voltage of
is much smaller than
, and if it is lower than sensitivity of the measuring instrument, the signal at this frequency cannot be measured. Therefore, the factors limiting the high-frequency characteristics of the sensor are mainly the frequencies of the two resonance points, and the front edge of the first resonance point is relatively slow, so that the transmission characteristics in the sensor design bandwidth are flat, and a certain margin is required.
It can be seen from Equation (9) that , and need to be reduced in order to make the resonance point larger than the design bandwidth while leaving a certain margin. The sensor’s induction plate is facing the GIS HV busbar. It is known from the capacitance definition that reducing can be achieved by increasing the plate distance or reducing the plate area, but since the sensor volume is small, increasing the distance or reducing the plate area will have an effect on . In addition, when the measurement system is installed to the GIS, the distance from the sensor’s induction plate to the HV busbar of the GIS is variable, causing to change. Therefore, when designing , it is necessary to ensure the high-frequency characteristics and the voltage division ratio of the sensor when measuring GIS equipment of any voltage level. According to the step response time of the measurement system of Equation (7) and the voltage division ratio formula of Equation (12), we concluded that the design of and should meet the following two points: First, the value of should remain the same or change as small as possible, not affected by installation methods or GIS equipment with different voltage levels; second, the value of should be as small as possible when measuring GIS equipment of different voltage levels.
Therefore, needs to be larger than to meet the above two requirements, and the limit condition needs to be used when designing . Considering the formed by the cavity of the sensor itself when the HV busbar was attached to the sensor, the distance between the HV busbar and the sensor’s induction plate was the smallest, and value of was the largest. In any case, was less than the limit case, and the high frequency characteristics were better than the limit case.
is the stray inductance between the GIS HV busbar and the sensor’s induction plate at high frequency. The electromagnetic wave radiated outward from the VFTO could not be quantitatively analyzed, and the generated magnetic field was not a uniform magnetic field. Therefore, the quantitative calculation of was difficult, only structural design could be used to reduce mutual inductance at high frequencies. Reducing also requires increasing the plate distance or reducing the plate area. In addition to considering the effect of increasing the distance between the plates on , it is also necessary to consider the problem of reducing the sensitivity of the sensor due to the reduction of the plate area.
In summary, and should be reduced without changing the sensitivity of the sensor. The cavity of the induction plate should be deeper without changing the size.
is the sum of stray inductance generated under the sensor plate and the sensor case at high frequencies and stray inductance of plate lead and sensor housing. Like
,
is difficult to calculate quantitatively. Reducing
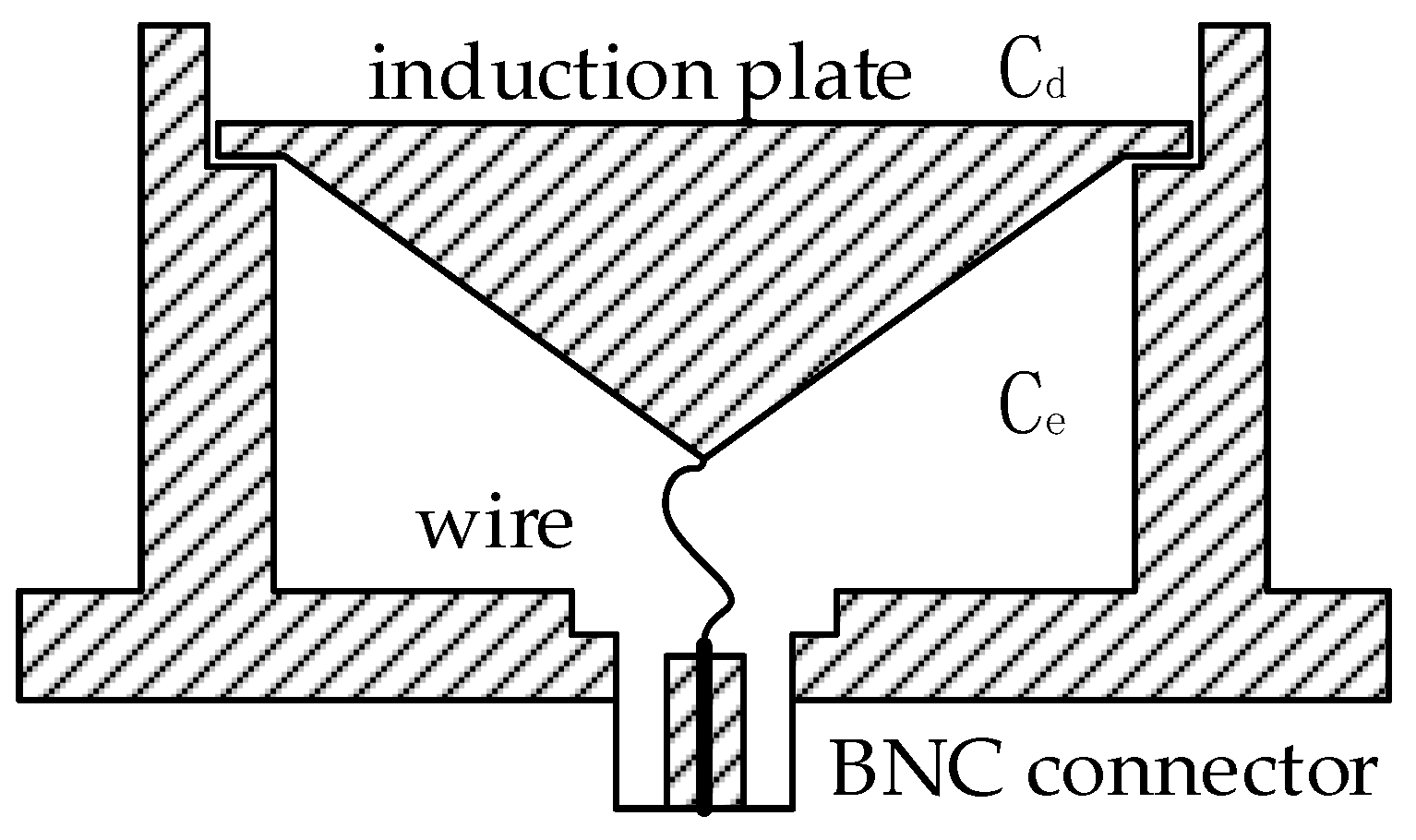
can be divided into two parts: first, reduce the stray inductance of the lower cavity at high frequencies and second, reduce the stray inductance of plate lead and sensor housing. According to the mutual inductance formula, reducing the inductance of the lower cavity at high frequencies can be achieved by reducing the area directly opposite the charged conductor. If the plate is cylindrical, the upper and lower ends are flat, and the area between the lower end and the sensor case is the smallest, but this will make the lead longer and increase the inductance caused by the lead, so it is necessary to find the balance between the two to reduce
. This paper used a tapered structure at the lower end of the sensor plate, which shortened the lead wire while ensuring the capacitance of
. Meanwhile, the area of the lower end of the electrode plate facing the sensor housing only increased slightly to minimize
. In addition, when the induction plate measured the signal, the induced charge was evenly distributed on the surface. If it is a flat plate structure, the time induced charge of the edge reaches the lead is longer than the time induced charge at the center of the substrate reaches the lead at high frequency due to the skin effect, the combination of the two will cause waveform distortion and adversely affect the amplitude range. The tapered structure can suppress the occurrence of redistribution, so that the difference in arrival time between the two is reduced [
23]. Sectional view of the sensor is shown in
Figure 6.
When designing the low frequency part of the sensor, there is no need to consider the effects of stray inductance. Therefore, the branch where the sensors
and
are located will not resonate, and there will be no poles
and zero point
of the transmission characteristic. The voltage of
is equal to
. That is to say, the equivalent circuit of the measurement system is shown in
Figure 2. It can be known from Equation (3) that the corresponding characteristics of the low frequency of the system are determined by
.
2.3. Design of Differentiating–Integrating Circuit
It can be seen from Equations (7) and (11) that the high frequency response of the system consists of the high frequency response of the sensor itself and the high frequency response of the differentiating–integrating, both of which need to meet the high frequency requirements of the VFTO measurement.
Since the quantitative calculation of the high-frequency stray inductance of the sensor is complicated, it is difficult to calculate the rise time of the pole
in
Figure 5, so the high-frequency response of the differentiating–integrating system needs to leave a certain margin. VFTO requires that the step response of the measurement system is less than 5 ns, leaving a 2 ns margin, which is reasonable for 3 ns. The high frequency response of the sensor is
When the high-voltage equipment such as GIS is working normally, the current frequency of the busbar is the power frequency. Since the VFTO is still superimposed by part of the power frequency when the circuit breaker and the insulation switch are operated, the bandwidth of the measurement system needs to be as low as the power frequency. From the analysis of the low frequency part of the measurement system, the low frequency response of the system is determined by the differential part of the calculus circuit. Therefore, the low frequency response of the measurement system is
equals
In addition, the voltage division ratio of the measurement system is determined by the combination of the sensor’s voltage division ratio and the differentiating–integrating circuit’s voltage division ratio. The voltage division ratio of the sensor is
, and the voltage division ratio of the differentiating–integrating system is
, then the voltage division ratio of the measurement system is
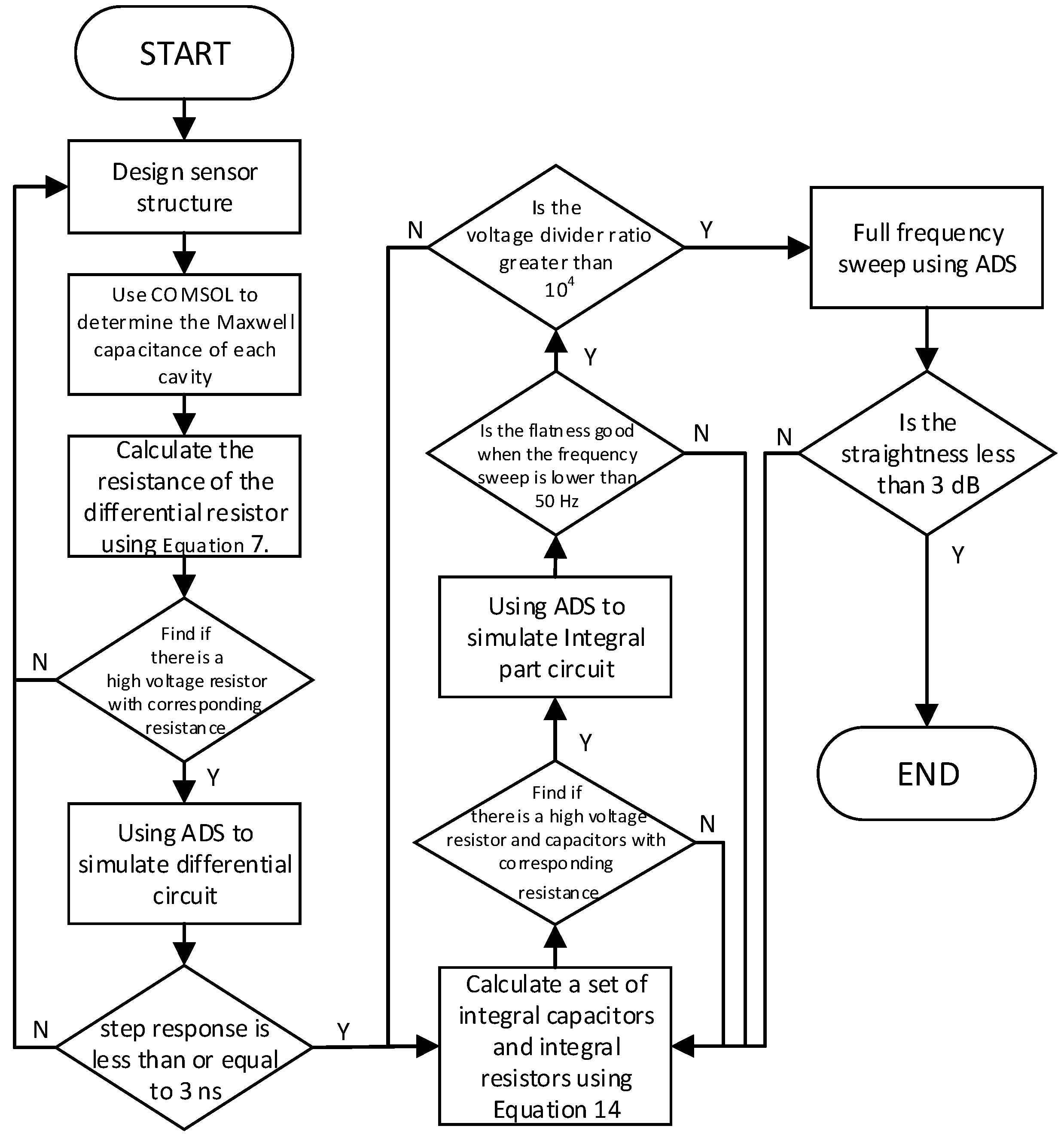
Under the premise of limited component resources, reasonable selection of parameters can make the measurement system reach the optimal value. Since
and
are determined by the structure, it is not possible to directly determine the various parameters in the circuit. After designing the structure of the sensor, we can use the COMSOL software to get the Maxwell capacitance of each cavity, also, S-parameter simulation and time domain simulation by ADS (advanced design system) can give us an optimized value of capacitance and resistance in the differentiating–integrating system. The specific process is shown in
Figure 7.
It was finally determined that
,
,
,
and
. It could be calculated that the step response time was
, low-frequency response time was
and voltage division ratio was larger than
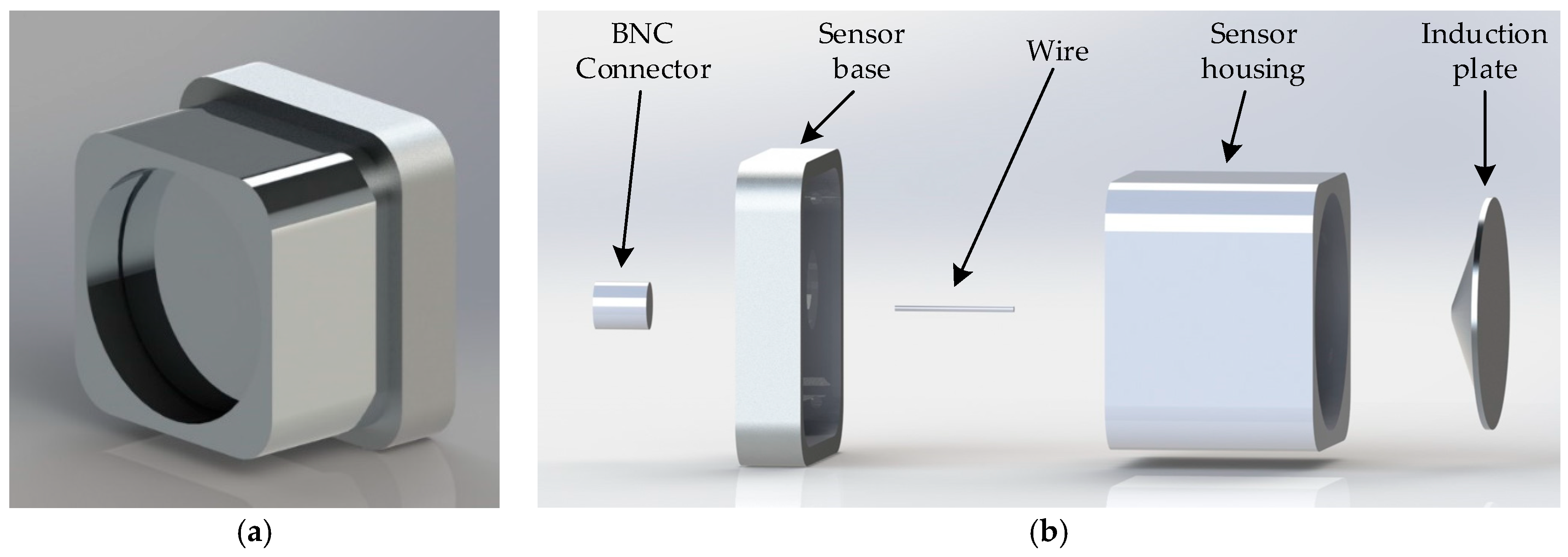
, the appearance of the front-end sensor of the measurement system completed with parameters and structure design is shown in the
Figure 8a.
Figure 8b is the exploded view of the front-end sensor structure, consists of five components. The induction plate and BNC connector were connected by a wire, which were all inside sensor housing installed on sensor base. The induction plate divides the inner cavity of the sensor housing into two parts to implement
and
, and insulated from the sensor housing.
The effect of inductance on the sensor bandwidth was discussed earlier, as shown in
Figure 5. In order to verify that the selection of
and
will not cause resonance in the measurement frequency band range, the values of
and
are brought into Equation (11) and theoretical calculations are performed. Since it is difficult to quantitatively calculate
and
, in a sensor with similar structure to measure VFTO, this value is an empirical value. In the literature [
12,
21], the authors have estimated
and
. These literatures are internal sensors installed at the hand hole of GIS, and their induction plates are larger in area than the sensors at the front of the measurement system in this paper. Therefore, the inductance is relatively large. Since
is greater than
,
is mainly estimated. In the literature [
12], the estimated
is about nH level or even smaller, and in the literature [
21], the estimated
is 4–5 nH. Substitute the estimated maximum value of 5 nH in literature [
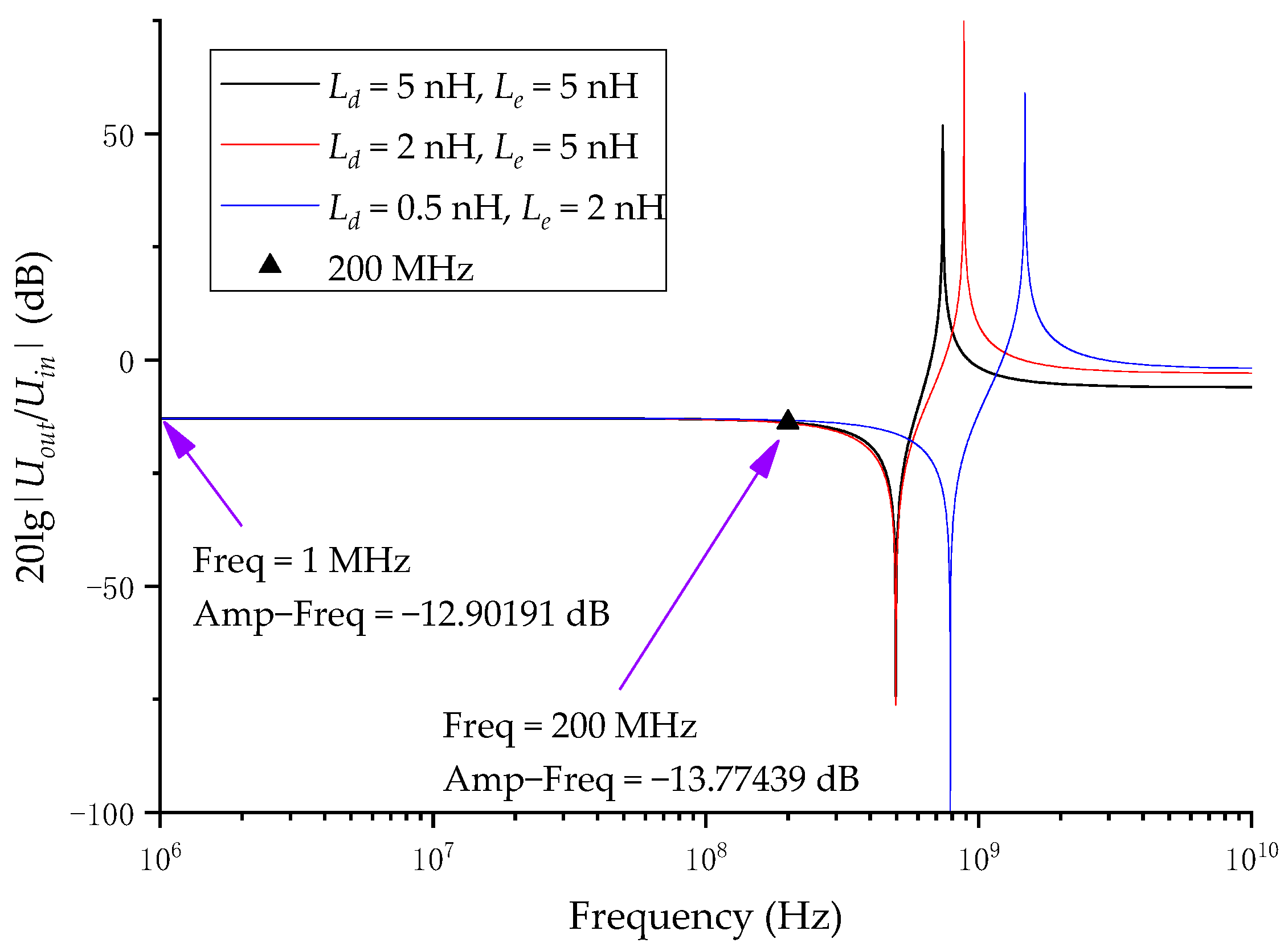
21] and calculate it using Matlab R2019a. The result is shown in
Figure 9. In
Figure 9, the black triangle is the effect of the inductance on the frequency characteristics at 200 MHz when
and
are both 5 nH. The difference between the frequency characteristics at 200 MHz and the frequency characteristics at 1 MHz is within 1 dB, and as
and
decrease, the resonance point moves to higher frequencies. In this paper, the area of the induction plate was much smaller than the internal sensors in the literature, and the structure of the induction plate was designed to reduce the inductance, so the inductance was much smaller than the internal sensors. As a result, the frequency response affected by the inductance at 200 MHz could be ignored, so the calculated system parameters would not be affected by inductance, and would not cause resonance at a frequency below 200 MHz.
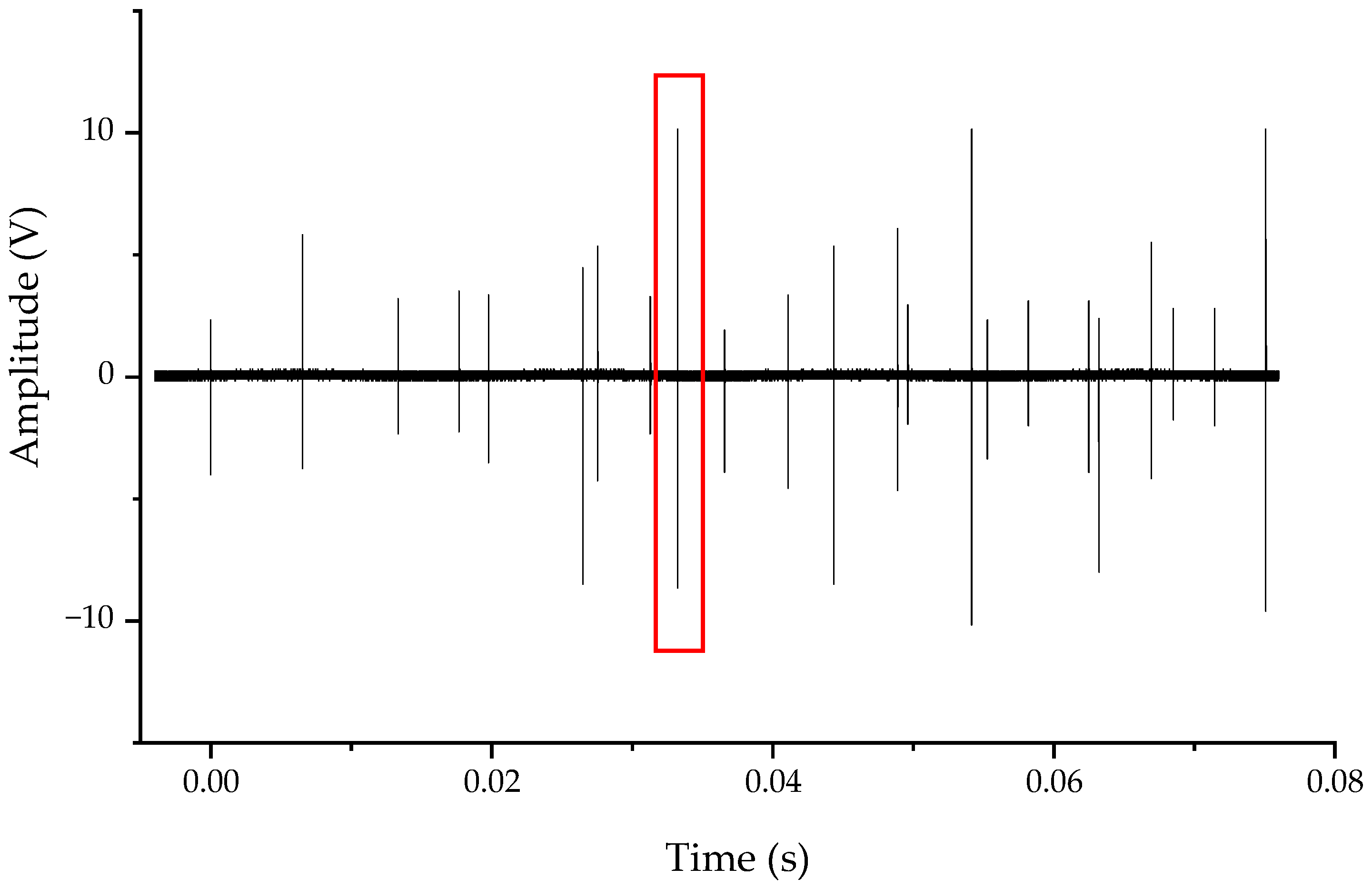
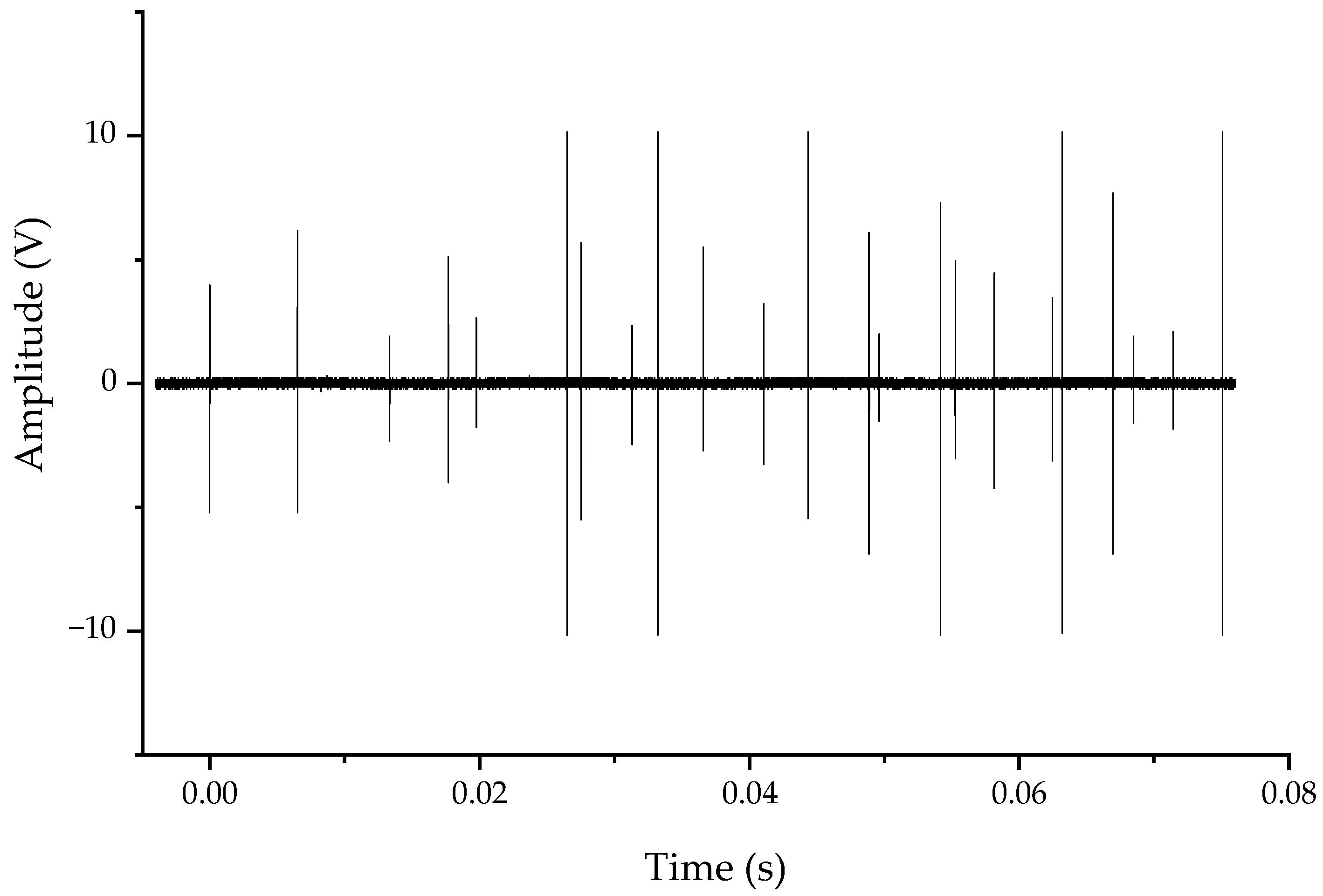
To verify that the parameter selection meets the needs of the VFTO measurement, we synthesized a simple VFTO signal generated by a single breakdown as defined by IEC 60071-1 to test the model. In the literature [
24], the method of synthesizing the VFTO waveform has been studied in detail, in accordance with the requirements of this test. Its frequency components, duration and expressions are as shown in the
Table 1.
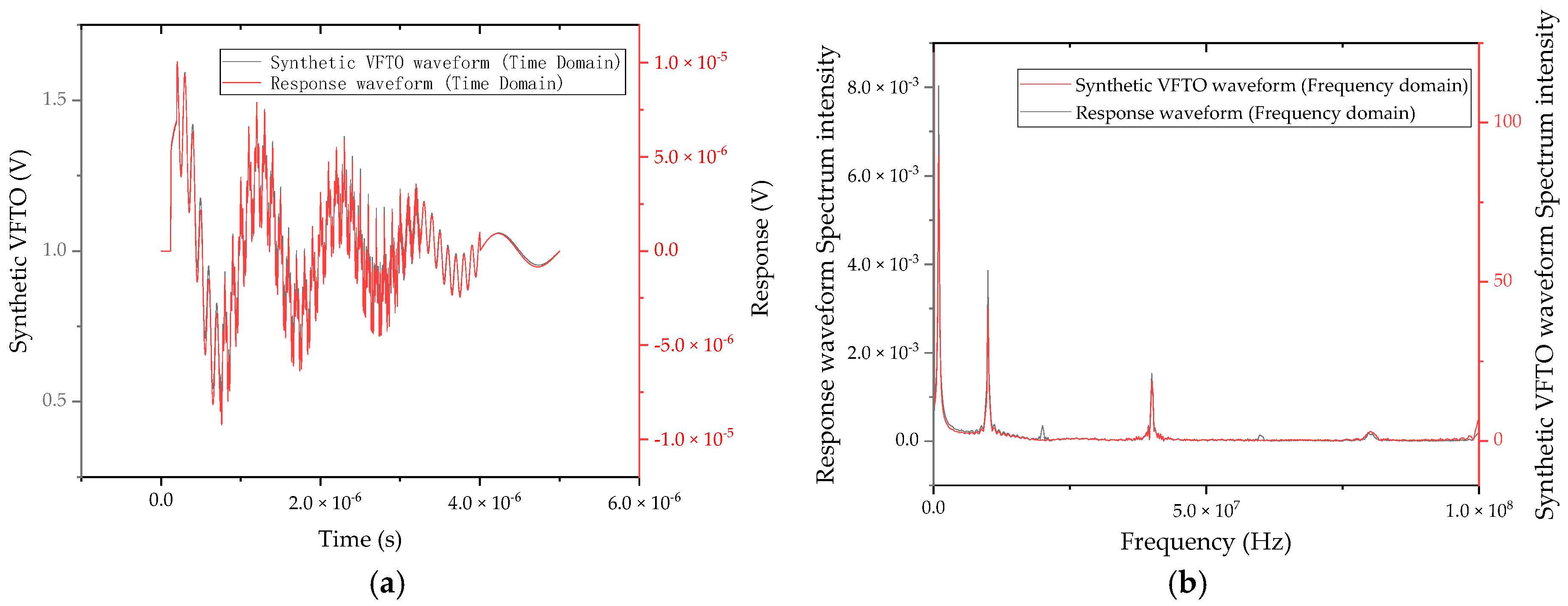
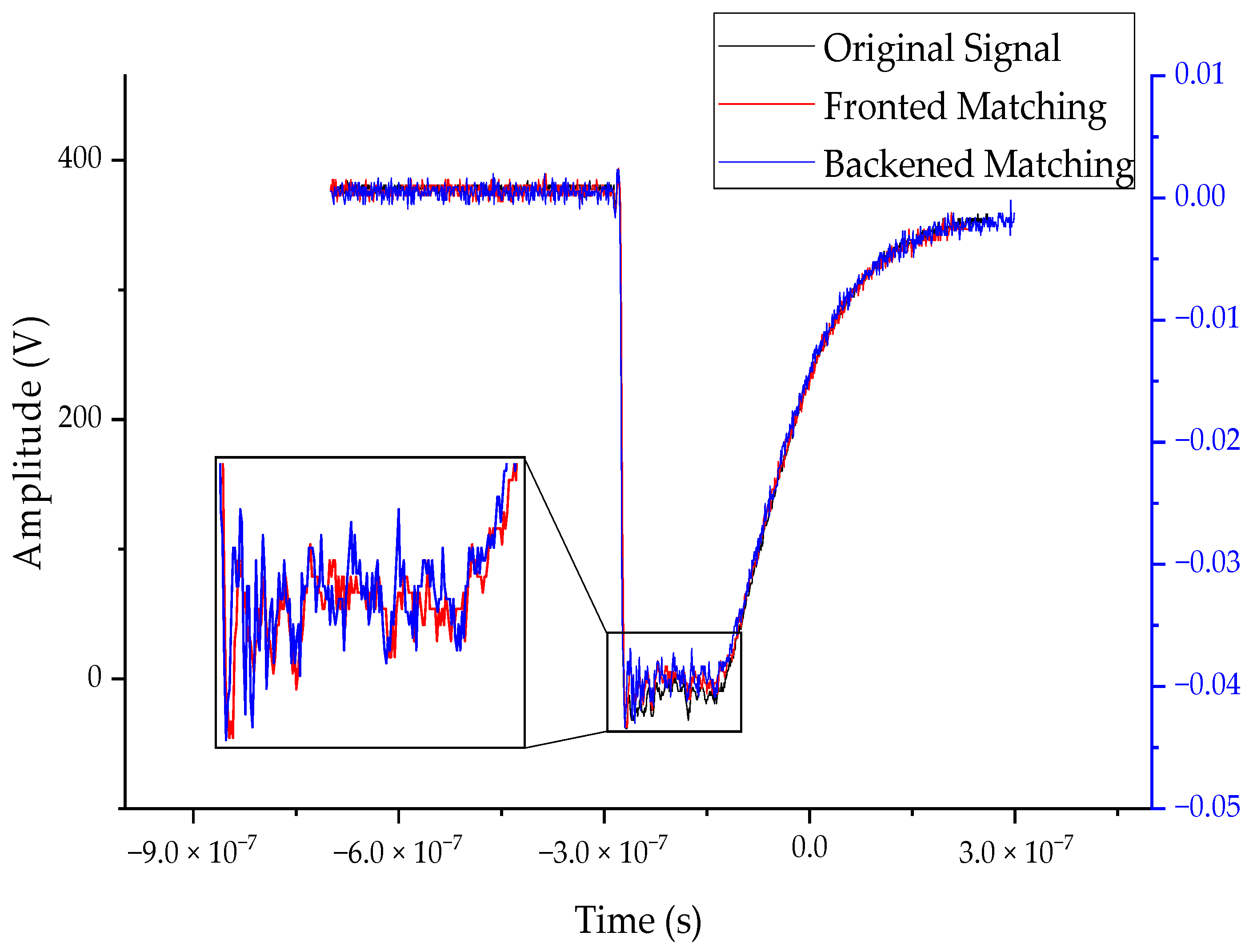
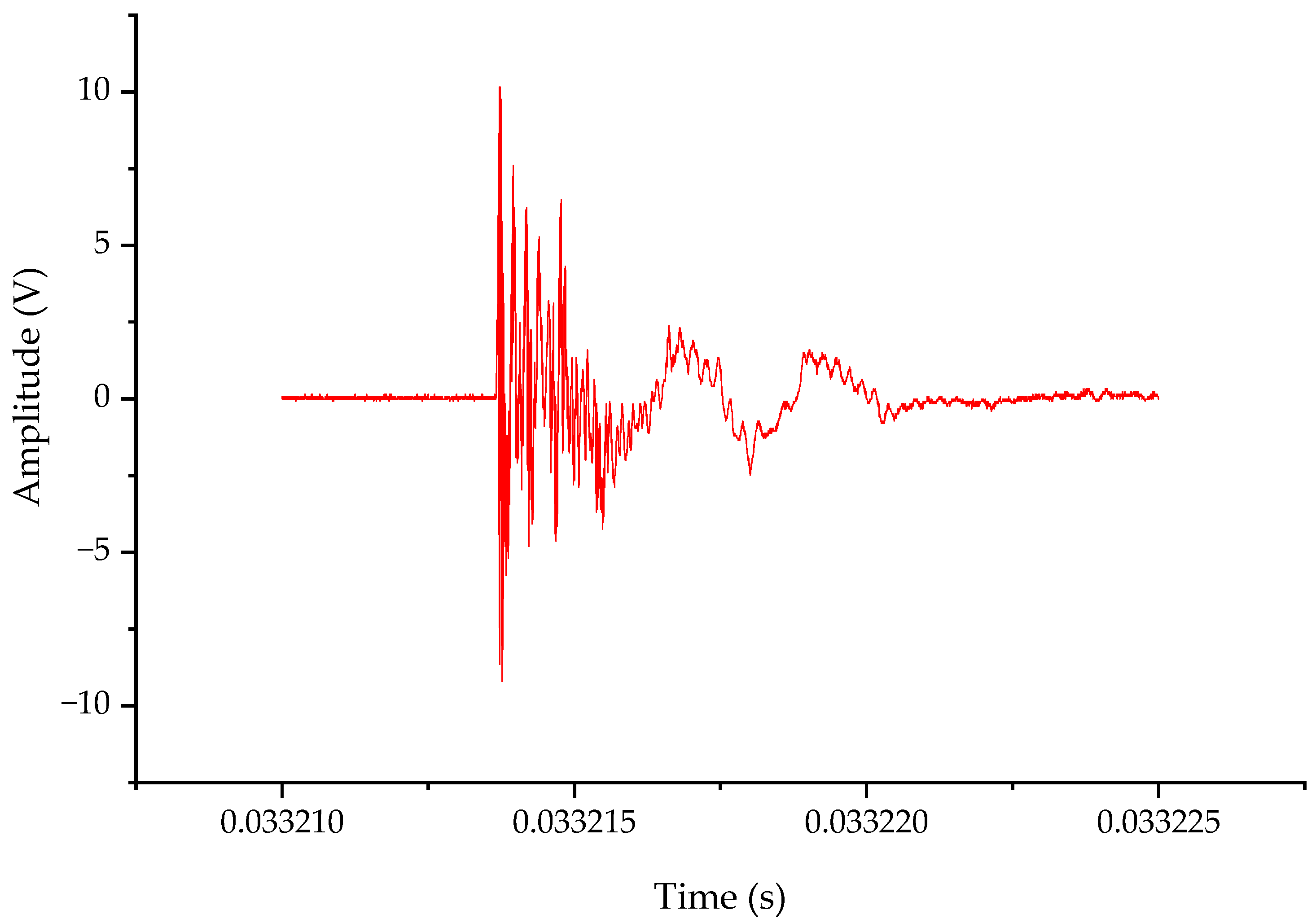
The synthesized VFTO waveform is input as an excitation to the model, and the resulting response is shown in
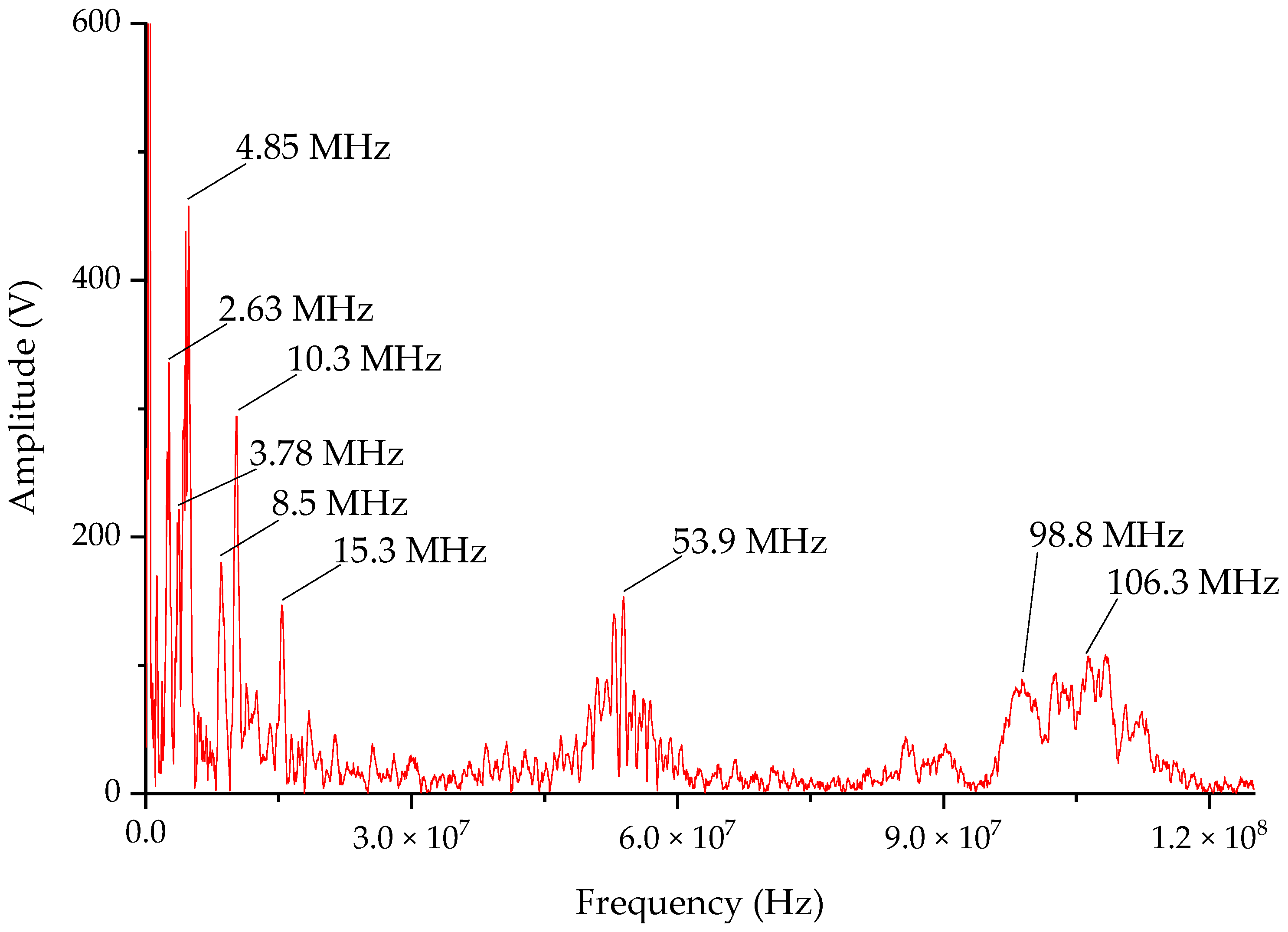
Figure 10a, and Fourier transform was performed on the excitation waveform and the response waveform, and the obtained frequency domain response is shown in
Figure 10b. The output signal of the time domain range measurement system was consistent with the waveform of the original signal and the time point at which the maximum amplitude occurred. There was no obvious phase shift between the high frequency superposition section of 0.2–4 μs and the low frequency range of 4–5 μs, and the response time to the step voltage at 0.125 μs was also within 3 ns. The high frequency part can quickly follow the changing trend of the VFTO synthesized signal without obvious overshoot and oscillation. In the frequency domain spectrum obtained by simulation, each component in the synthesized VFTO frequency domain spectrum had an obvious response. However, the response obtained at 100 MHz simulation was slightly smaller than the response of the synthesized VFTO signal. However, the overall flatness was within 3 dB, which is an allowable error.
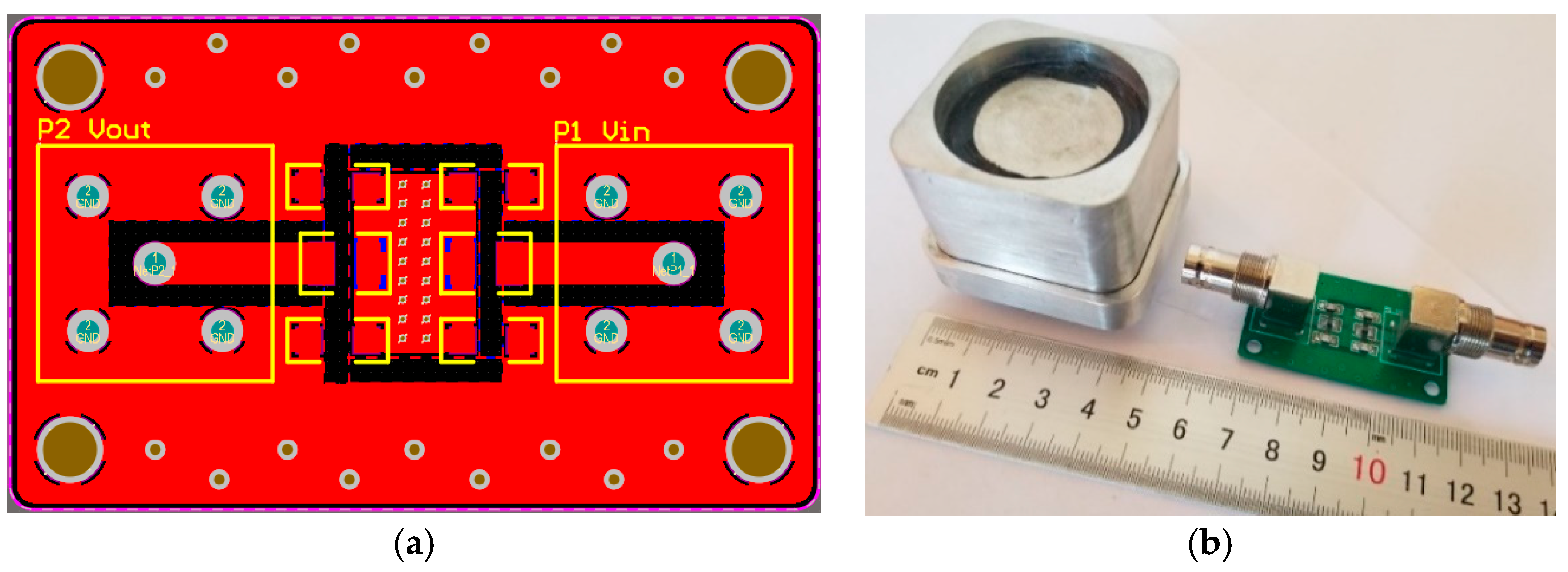
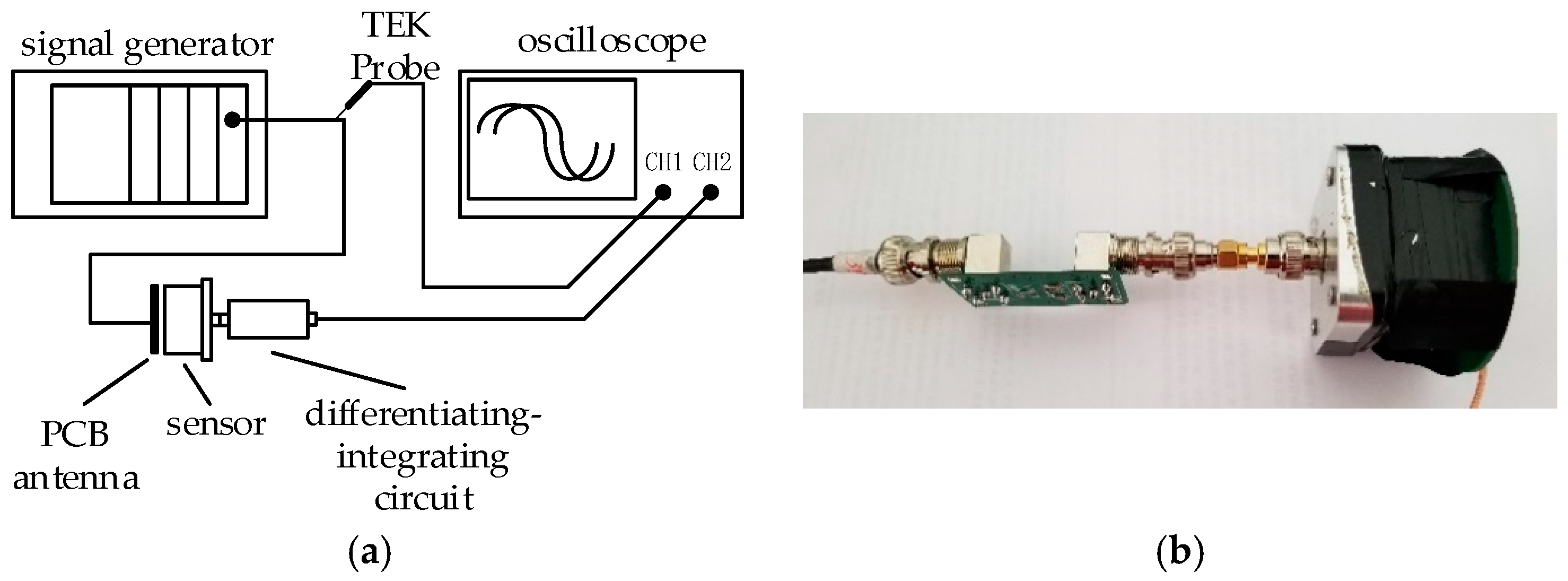
After the parameters are determined, the physical object need to be fabricated, but the theoretical calculation parameters are simplified, and there are many uncertain factors in the actual fabrication, such as the stray inductance of the resistor, the withstand voltage value of the capacitor, the parasitic capacitance and inductance caused by the unreasonable wiring, etc. Although its value is small, it will have a large impact in high frequency sensitive circuits. Therefore, in the differentiating–integrating circuit, it is necessary to select the resistor having a high withstand voltage and a small stray capacitance, also, the capacitor should have a high withstand voltage. In order to reduce the parasitic capacitance and inductance caused by the circuit wiring, the resistor can be arranged in series using multiple identical resistance values, and the capacitor can be radially arranged using multiple identical capacitance values. The result is a reduced area between the components, increasing the distance between the components, and effectively reducing parasitic capacitance and inductance. In terms of component connection selection, in order to avoid parasitic capacitance caused by large via holes of the plug-in components, patch components were used. The final design of the differentiating–integrating printed circuit board (PCB) is shown in
Figure 11a, the manufactured prototype measurement system is shown in
Figure 11b.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}