An Optical Filter-Less CMOS Image Sensor with Differential Spectral Response Pixels for Simultaneous UV-Selective and Visible Imaging †


Abstract
1. Introduction
2. Sensor Design, Fabrication, and Measurement Setup
2.1. Circuit Architecture
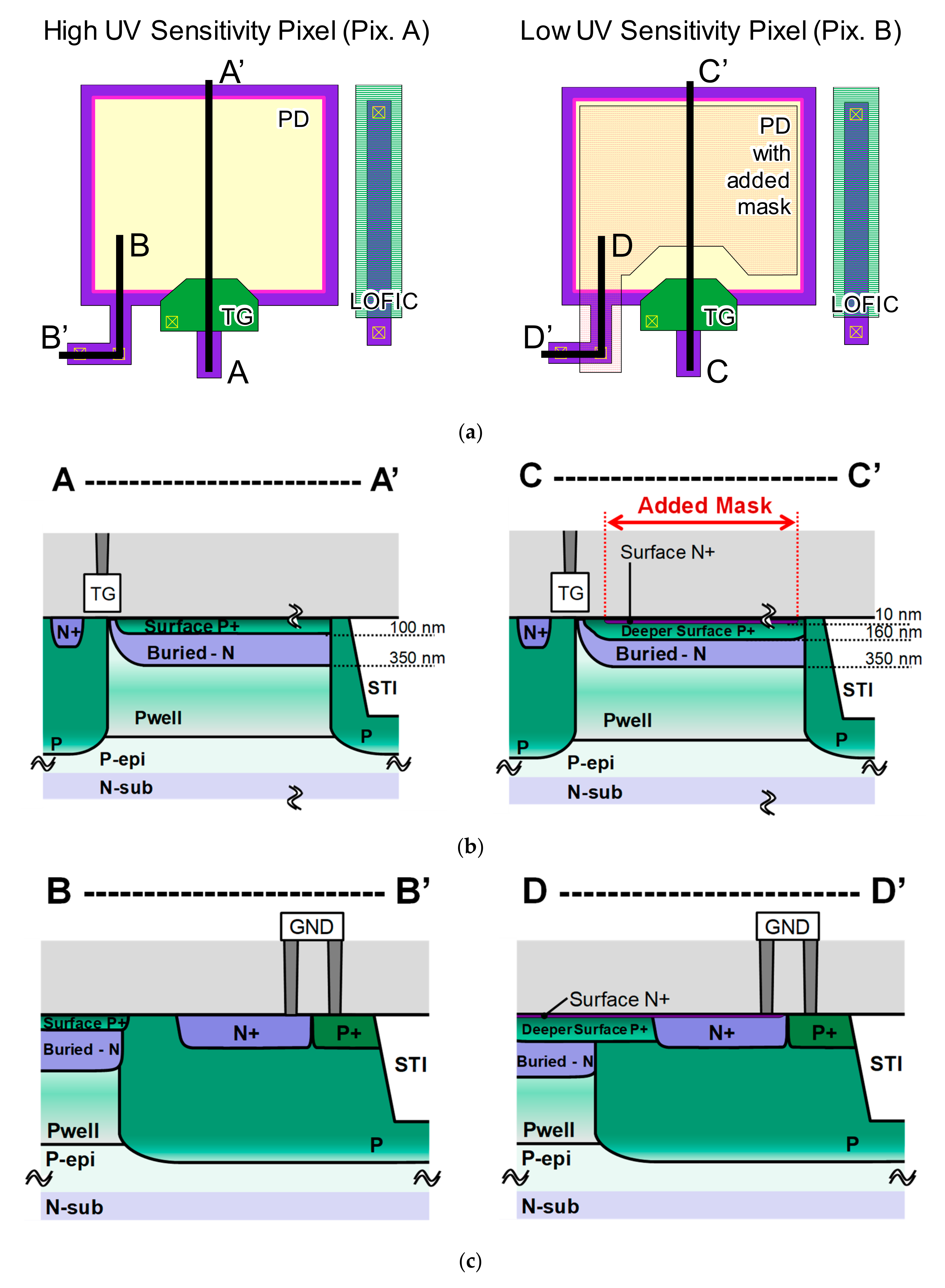
2.2. Pixel Structure and Implant Profiles
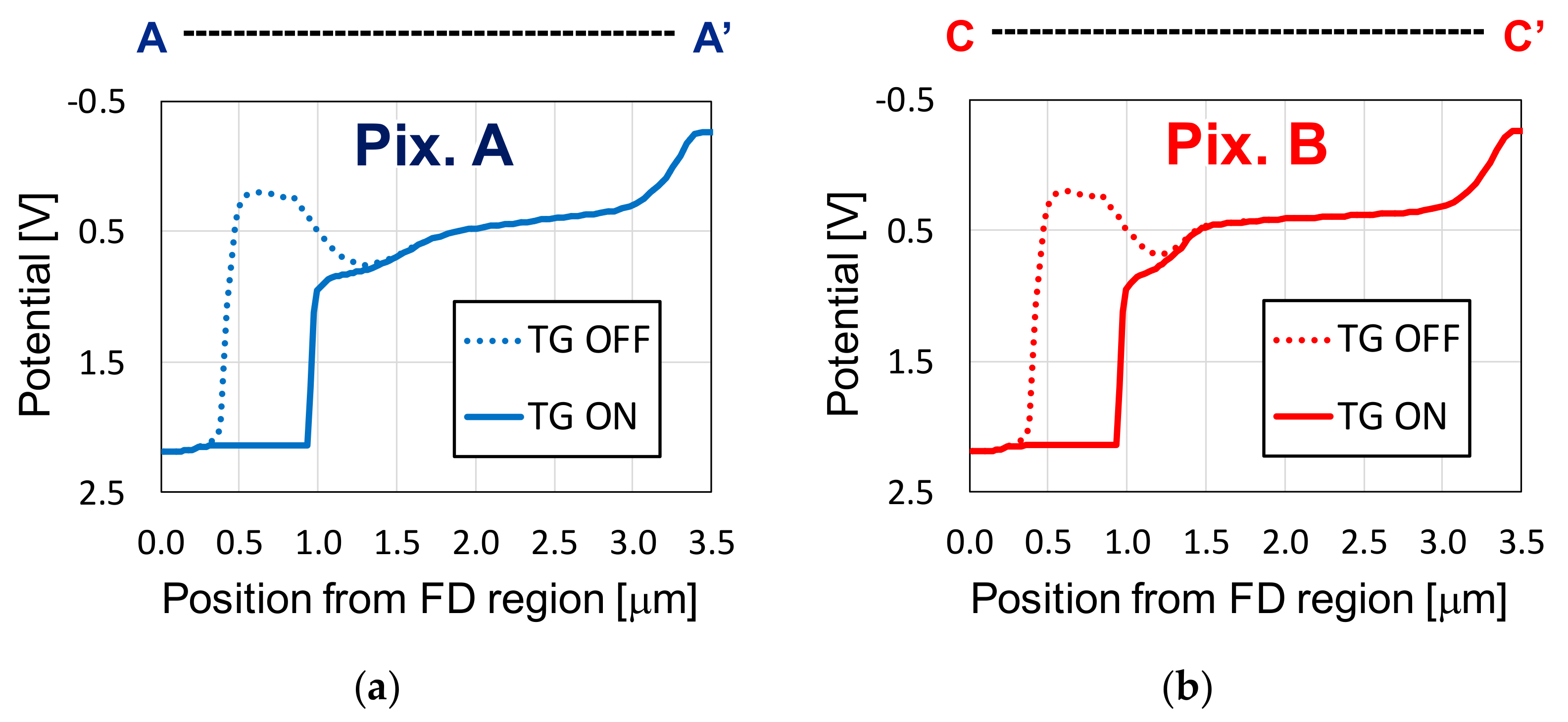
2.3. Device Simulation
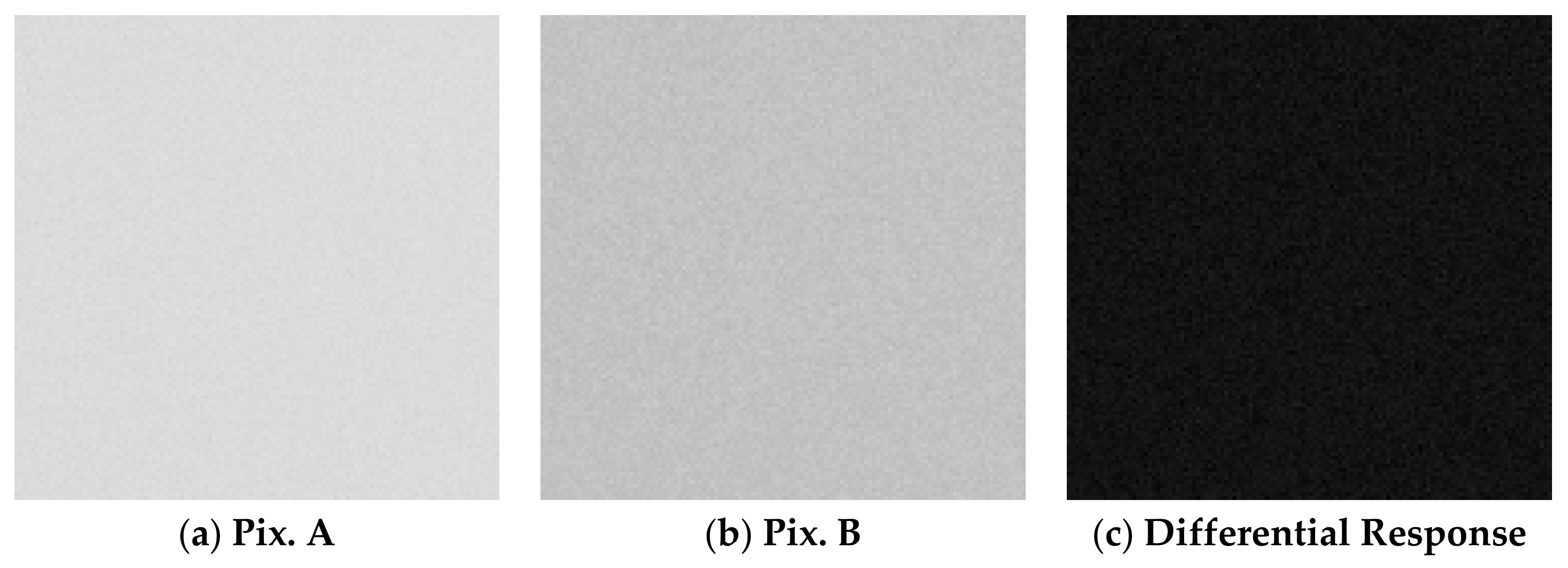
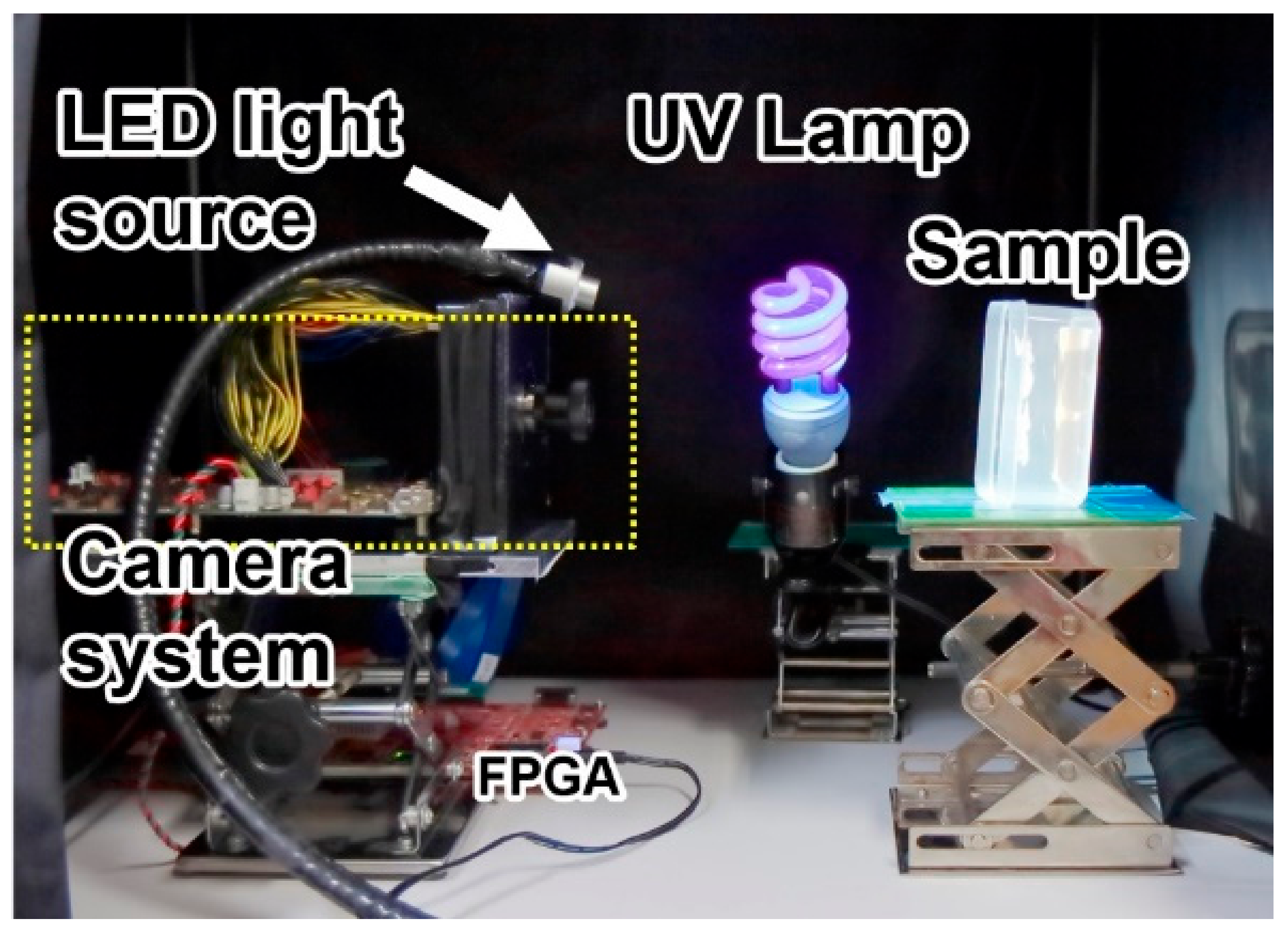
3. Chip Manufacturing and Measurement Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gyongy, I.; Dutton, N.A.; Henderson, R.K. Single-Photon Tracking for High-Speed Vision. Sensors 2018, 18, 323. [Google Scholar] [CrossRef] [PubMed]
- Katic, N.; Popovic, V.; Cojbasic, R.; Schmid, A.; Leblebici, Y. A Relative Imaging CMOS Image Sensor for High Dynamic Range and High Frame-Rate Machine Vision Imaging Applications. IEEE Sens. J. 2015, 15, 4121–4129. [Google Scholar] [CrossRef]
- Paredes, J.A.; González, J.; Saito, C.; Flores, A. Multispectral imaging system with UAV integration capabilities for crop analysis. In Proceedings of the 2017 First IEEE International Symposium of Geoscience and Remote Sensing (GRSS-CHILE), Valdivia, Chile, 15–16 June 2017. [Google Scholar] [CrossRef]
- Jin, M.; Park, K.; Song, M. An Intelligent CMOS Image Sensor with a Deep Learning Algorithm for Smart Internet of Things. In Proceedings of the 2019 34th International Technical Conference on Circuits/Systems, Computers and Communications (ITC-CSCC), JeJu, Korea, 23–26 June 2019. [Google Scholar] [CrossRef]
- Lee, W. 3D machine vision in IoT for factory and building automation (Invited). In Proceedings of the 2017 IEEE International Symposium on Circuits and Systems (ISCAS), Baltimore, MD, USA, 28–31 May 2017. [Google Scholar] [CrossRef]
- Dupuit, E.; Dandrieux, A.; Kvapil, P.; Ollivier, J.; Dusserre, G.; Thomas, O. UV spectrophotometry for monitoring toxic gases. Analusis 2000, 28, 966–972. [Google Scholar] [CrossRef][Green Version]
- Aoyagi, Y.; Fujihara, Y.; Murata, M.; Shike, H.; Kuroda, R.; Sugawa, S. A CMOS image sensor with dual pixel reset voltage for high accuracy ultraviolet light absorption spectral imaging. Jpn. J. Appl. Phys. 2019, 58, SBBL03. [Google Scholar] [CrossRef]
- Ishii, H.; Nagase, M.; Ikeda, M.; Shiba, Y.; Shirai, Y.; Kuroda, R.; Sugawa, S. A high sensitivity compact gas concentration sensor using UV light and charge amplifier circuit. In Proceedings of the IEEE Sensors, Orlando, FL, USA, 30 October–3 November 2016. [Google Scholar] [CrossRef]
- Djuric, Z.; Radulovic, K.; Trbojevic, N.; Lazic, A. Silicon resonant cavity enhanced UV flame detector. In Proceedings of the 23rd International Conference on Microelectronics, Nis, Serbia, 12–15 May 2002; pp. 239–242. [Google Scholar] [CrossRef]
- Shi, L.; Sarubbi, F.; Nihtianov, S.N.; Nanver, L.K.; Scholtes, T.L.M.; Scholze, F. High performance silicon-based extreme ultraviolet (EUV) radiation detector for industrial application. In Proceedings of the 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 1877–1882. [Google Scholar] [CrossRef]
- Lucht, R.P.; Hanna, S.; Barron-Jiminez, R.; Caton, J.A.; Walther, T. Absorption based UV-sensors for combustion processes. In Proceedings of the First ISA/IEEE Sensors for Industry Conference (Cat. No.01EX459), Rosemont, IL, USA, 7 November 2001; pp. 300–302. [Google Scholar] [CrossRef]
- Ioannou, I.; Steiner, N.; Zhou, J.; Gilerson, A.; Gross, B.; Moshary, F.; Ahmed, S. Application of UV and NIR Bands for the Advanced IOP Retrieval Algorithms in Coastal Waters. In Proceedings of the 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; pp. 375–378. [Google Scholar] [CrossRef]
- Yan, H.; Jiang, M.; Han, B. A novel method of identifying the quality of peucedanum: The UV two-dimensional correlation analysis based on pH perturbation. In Proceedings of the 2010 3rd International Conference on Biomedical Engineering and Informatics, Yantai, China, 16–18 October 2010; pp. 699–703. [Google Scholar] [CrossRef]
- Sood, A.K.; Zeller, J.W.; Puri, Y.R.; Detchprohm, T.; Shen, S. Development of High Gain GaN/AlGaN Avalanche Photodiode Arrays for UV Detection and Imaging Applications. Int. J. Phys. Appl. 2017, 7, 49–58. [Google Scholar]
- Nikzad, S.; Jewel, A.D.; Carver, A.G.; Hennessy, J.J.; Hoenk, M.E.; Cheng, S.; Goodsall, T.M.; Kyne, G.; Hamden, E.; Jones, T.J. UV/Optical Photon Counting and Large Format Imaging Detectors from CubeSats, SmallSats to Large Aperture Space Telescopes & Imaging Spectrometers. In Proceedings of the International Image Sensor Workshop 2017, Hiroshima, Japan, 30 May–2 June 2017; pp. 352–355. [Google Scholar]
- Kuroda, R.; Kawada, S.; Nasuno, S.; Nakazawa, T.; Koda, Y.; Hanzawa, K.; Sugawa, S. A FSI CMOS Image Sensor with 200-1000 nm Spectral Response and High Robustness to Ultraviolet Light Exposure. In Proceedings of the International Image Sensor Workshop 2013, Snowbird, UT, USA, 12–16 June 2013; pp. 61–64. [Google Scholar]
- Kuroda, R.; Kawada, S.; Nasuno, S.; Nakazawa, T.; Koda, Y.; Hanzawa, K.; Sugawa, S. A Highly Ultraviolet Light Sensitive and Highly Robust Image Sensor Technology Based on Flattened Si Surface. ITE Trans. Media Technol. Appl. 2014, 2, 123–130. [Google Scholar] [CrossRef][Green Version]
- Nakazawa, T.; Kuroda, R.; Koda, Y.; Sugawa, S. Photodiode dopant structure with atomically flat Si surface for high-sensitivity and stability to UV light. In Proceedings of the IS&T/SPIE Electronic Imaging, Burlingame, CA, USA, 15 February 2012. [Google Scholar] [CrossRef]
- Wang, X.; Ma, C.; Liu, Y.; Li, Y.; Zhou, Q. A 4M, 1.4e-noise, 96dB dynamic range, back-side illuminated CMOS image sensor. In Proceedings of the International Image Sensor Workshop 2015, Vaal, The Netherlands, 8–11 June 2015. [Google Scholar]
- Okino, T.; Yamahira, S.; Yamada, S.; Hirose, Y.; Odagawa, A.; Kato, Y.; Tanaka, T. A Real-Time Ultraviolet Radiation Imaging System Using an Organic Photoconductive Image Sensor. Sensors 2018, 18, 314. [Google Scholar] [CrossRef] [PubMed]
- Gat, N. Imaging spectroscopy using tunable filters: A review. In Proceedings of the SPIE, Orlando, FL, USA, 5 April 2000; Volume 4056, pp. 50–64. [Google Scholar]
- Fujihara, Y.; Nasuno, S.; Wakashima, S.; Aoyagi, Y.; Kuroda, R.; Sugawa, S. 190–1100 nm Waveband multispectral imaging system using high light resistance wide dynamic range CMOS image sensor. In Proceedings of the IEEE Sensors, Orlando, FL, USA, 30 October–3 November 2016; pp. 283–285. [Google Scholar]
- Lambrechts, A.; Gonzalez, P.; Geelen, B.; Soussan, P.; Tack, K.; Jayapala, M. A CMOS-compatible, integrated approach to hyper- and multispectral imaging. In Proceedings of the 2014 IEEE International Electron Devices Meeting, San Francisco, CA, USA, 15–17 December 2014; pp. 10.5.1–10.5.4. [Google Scholar] [CrossRef]
- Seo, H.; Aihara, S.; Watabe, T.; Ohtake, H.; Sakai, T.; Kubota, M.; Egami, N.; Hiramatsu, T.; Matsuda, T.; Furuta, M.; et al. A 128 × 96 Pixel Stack-Type Color Image Sensor with B-, G-, R-sensitive organic photoconductive films. In Proceedings of the International Image Sensor Workshop, Hokkaido, Japan, 8–11 June 2011. [Google Scholar]
- Merrill, R.B. Color Separation in an Active Pixel Cell Imaging Array Using a Triple-Well Structure. U.S. Patent 5,965,875, 12 October 1999. [Google Scholar]
- Anzagira, L.; Fossum, E. Two Layer Image Sensor Pixel Concept for Enhanced Low Light Color Imaging. In Proceedings of the International Image Sensor Workshop, Vaals, The Netherlands, 8–11 June 2015. [Google Scholar]
- Takemoto, Y.; Kobayashi, Y.; Tsukimura, M.; Takazawa, N.; Kato, H.; Suzuki, S.; Aoki, J.; Kondo, T.; Saito, H.; Gomi, Y.; et al. Multi-storied photodiode CMOS image sensor for multiband imaging with 3D technology. In Proceedings of the IEEE International Electron Devices Meeting (IEDM), Washington, DC, USA, 7–9 December 2015; pp. 30.1.1–30.1.4. [Google Scholar] [CrossRef]
- Sipauba Carvalho da Silva, Y.R.; Koda, Y.; Nasuno, S.; Kuroda, R.; Sugawa, S. An Ultraviolet Radiation Sensor Using Differential Spectral Response of Silicon Photodiodes. In Proceedings of the IEEE Sensors 2015, Busan, Korea, 1–4 November 2015; pp. 1847–1850. [Google Scholar] [CrossRef]
- Sipauba Carvalho da Silva, Y.R.; Kuroda, R.; Sugawa, S. A Highly Robust Silicon Ultraviolet Selective Radiation Sensor Using Differential Spectral Response Method. Sensors 2019, 19, 2755. [Google Scholar] [CrossRef] [PubMed]
- Sipauba Carvalho da Silva, Y.R.; Kuroda, R.; Sugawa, S. A VGA Optical Filter-less CMOS Image Sensor with UV-selective and Visible Light Channels by Differential Spectral Response Pixels. In Proceedings of the International Image Sensor Workshop, Snowbird, UT, USA, 23–27 June 2019; pp. 302–305. [Google Scholar]
- Sugawa, S.; Akahane, N.; Adachi, S.; Mori, K.; Ishiuchi, T.; Mizobuchi, K. A 100 dB dynamic range CMOS image sensor using a lateral overflow integration capacitor. In Proceedings of the 2005 IEEE International Digest of Technical Papers of the International Solid-State Circuits Conference, San Francisco, CA, USA, 10 February 2005; pp. 352–603. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Light Source | Pix. A Image Signal Amplitude | Differential Response Image | |
|---|---|---|---|
| Signal Amplitude | Noise | ||
| UV-C | 5317 DN | 4102 DN | 31.12 DN |
| White LED | 5111 DN | 588 DN | 36.56 DN |
| Process Technology | 0.18 µm 1P5M CMOS with Pinned PD | ||
| Power Supply Voltage | 3.3 V | ||
| Die Size | 4.8 mmH × 4.8 mmV | ||
| Pixel Size | 5.6 µmH × 5.6 µmV | ||
| Number of Pixels | Total | 648H × 488V | |
| Effective | 640H × 480V | ||
| Aperture Ratio | 36% | ||
| Frame Rate | 30 fps | ||
| Conversion Gain | 172 µV/e− (S1 signal) | ||
| Full Well Capacity | 131 ke− (S2 signal) | ||
| Dynamic Range | 92.3 dB | ||
| Spectral Sensitivity Range | High UV Sensitivity Pixel | 200–750 nm | |
| High UV Sensitivity Pixel | 390–750 nm | ||
| Differential Response | 200–480 nm | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sipauba Carvalho da Silva, Y.R.; Kuroda, R.; Sugawa, S. An Optical Filter-Less CMOS Image Sensor with Differential Spectral Response Pixels for Simultaneous UV-Selective and Visible Imaging. Sensors 2020, 20, 13. https://doi.org/10.3390/s20010013
Sipauba Carvalho da Silva YR, Kuroda R, Sugawa S. An Optical Filter-Less CMOS Image Sensor with Differential Spectral Response Pixels for Simultaneous UV-Selective and Visible Imaging. Sensors. 2020; 20(1):13. https://doi.org/10.3390/s20010013
Chicago/Turabian StyleSipauba Carvalho da Silva, Yhang Ricardo, Rihito Kuroda, and Shigetoshi Sugawa. 2020. "An Optical Filter-Less CMOS Image Sensor with Differential Spectral Response Pixels for Simultaneous UV-Selective and Visible Imaging" Sensors 20, no. 1: 13. https://doi.org/10.3390/s20010013
APA StyleSipauba Carvalho da Silva, Y. R., Kuroda, R., & Sugawa, S. (2020). An Optical Filter-Less CMOS Image Sensor with Differential Spectral Response Pixels for Simultaneous UV-Selective and Visible Imaging. Sensors, 20(1), 13. https://doi.org/10.3390/s20010013