Optimal Design of Angular Displacement Sensor with Shared Magnetic Field Based on the Magnetic Equivalent Loop Method


Abstract
:1. Introduction
2. The Studied Sensors
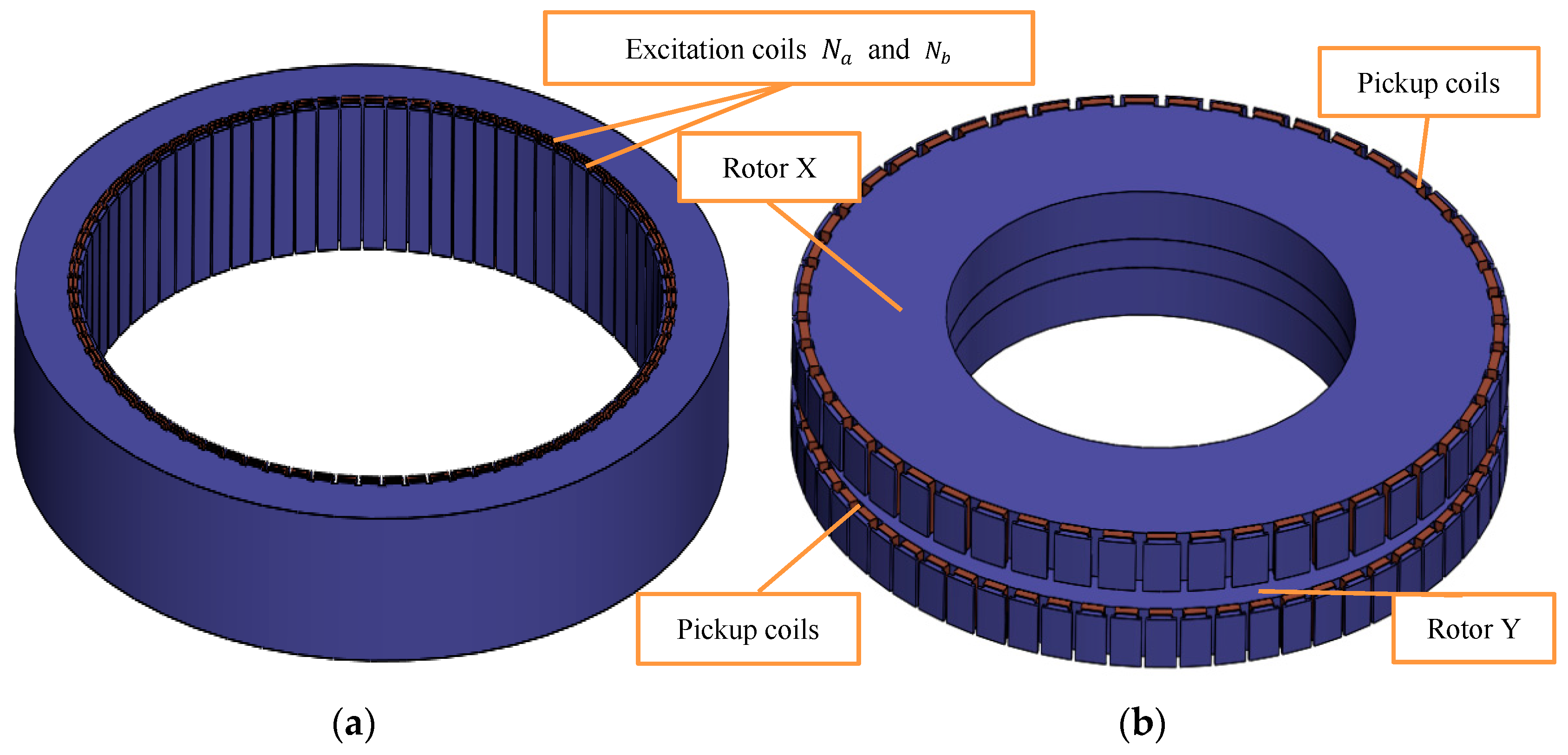
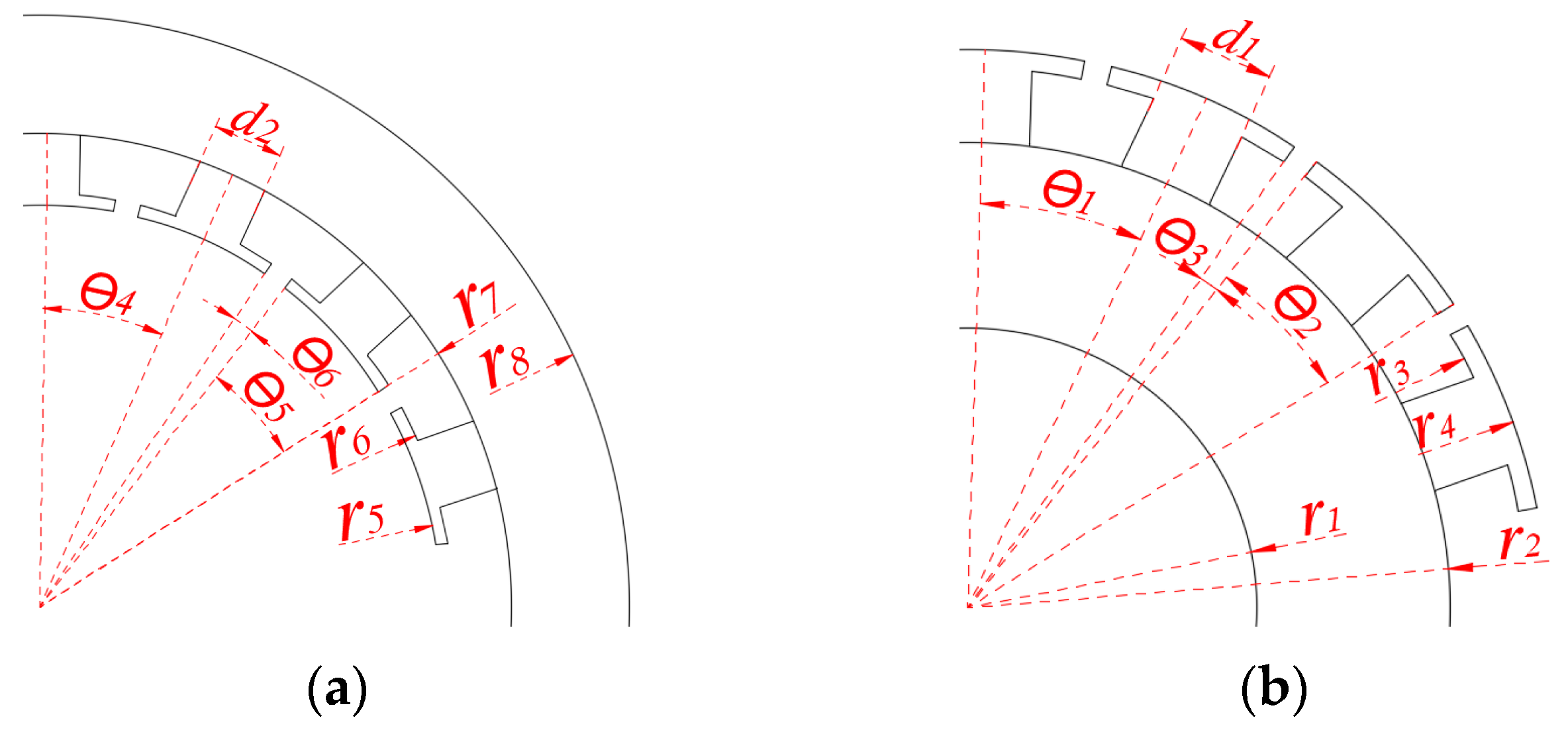
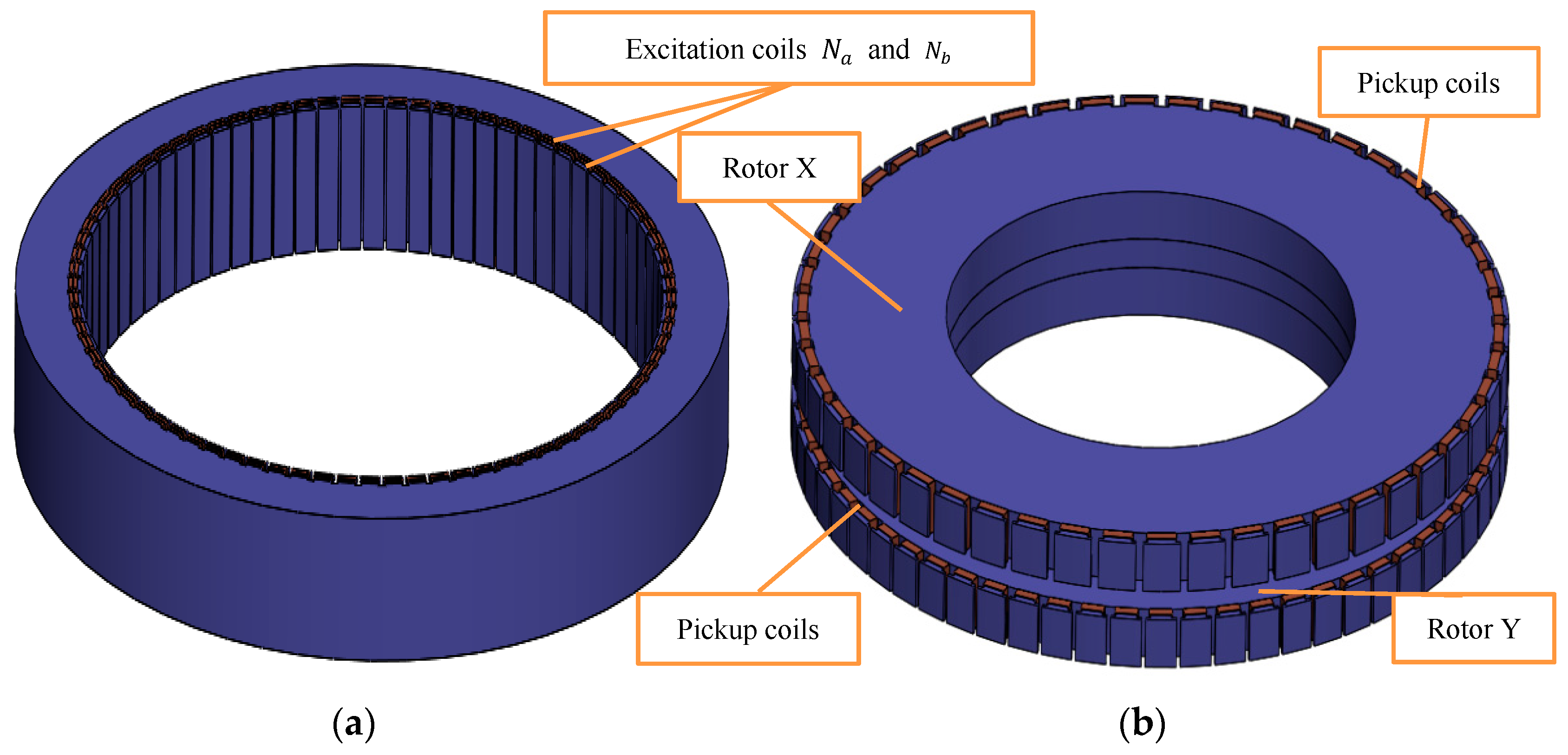
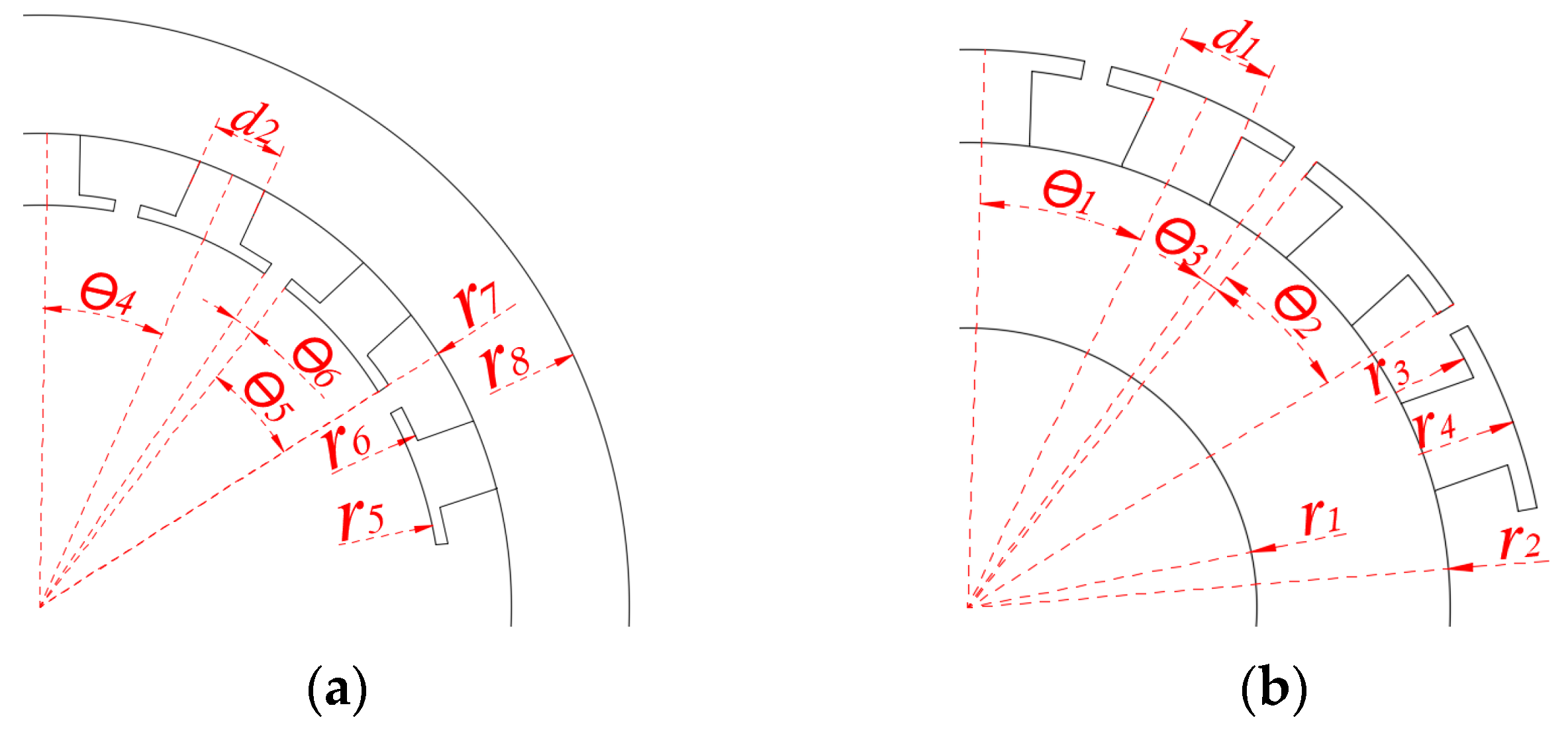
2.1. Basic Structure of Sensor
2.2. Measurement Principle of Sensor
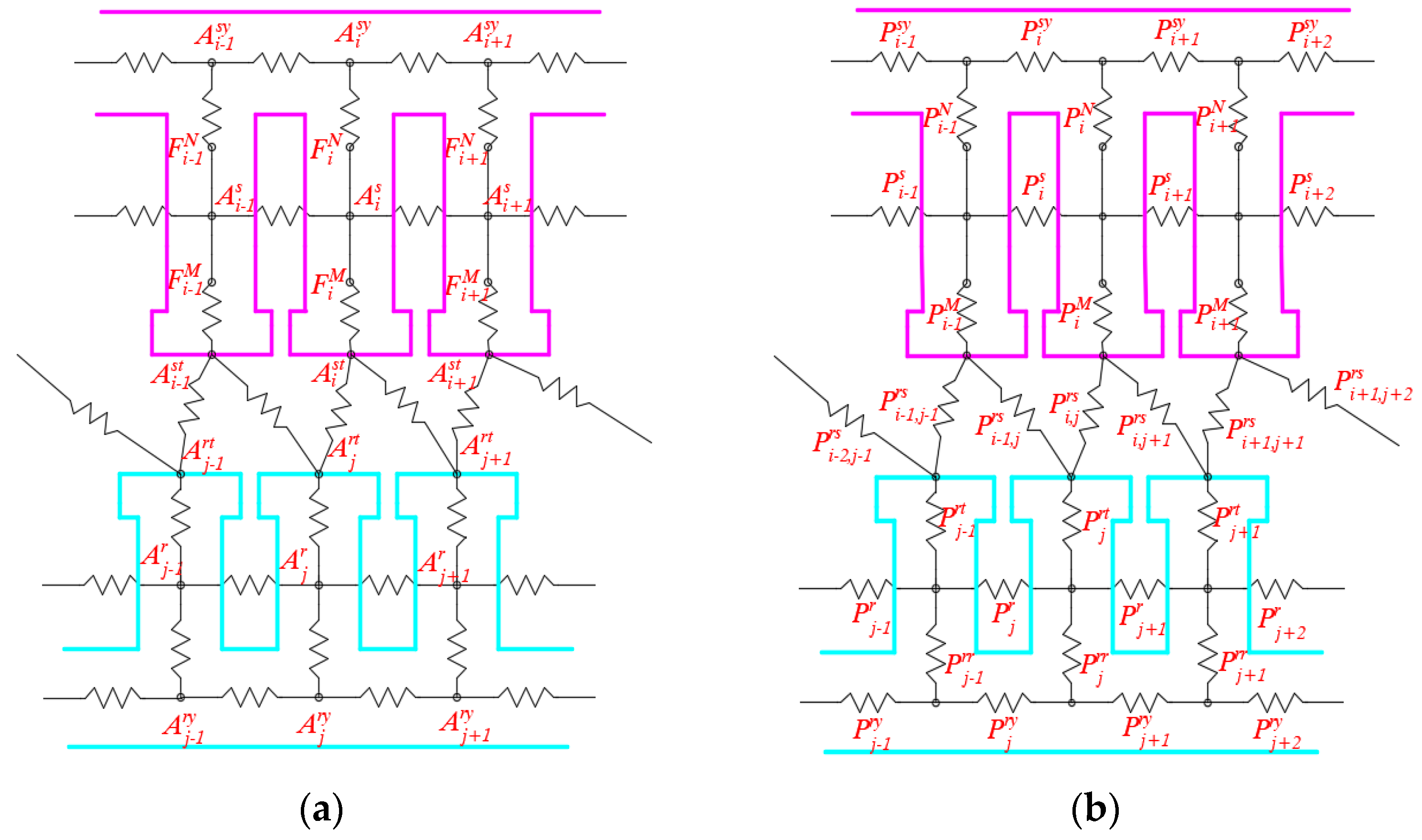
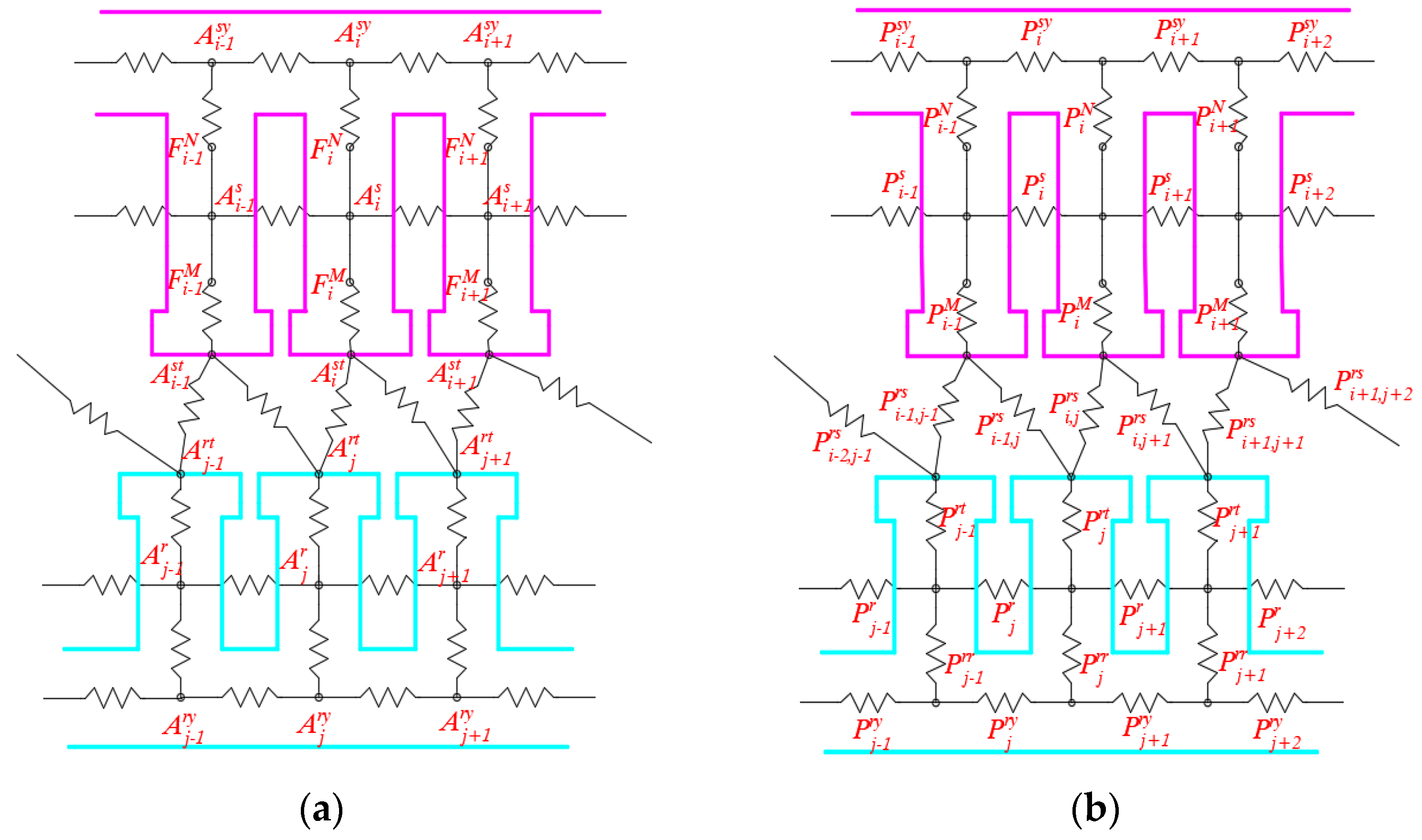
3. Magnetic Equivalent Loop Method
3.1. Mathematical Model
- (1)
- Magnetic flux leakage between the nodes is neglected.
- (2)
- The influence of the excitation magnetic field diffused between the two inner rotors on the two rotors is neglected.
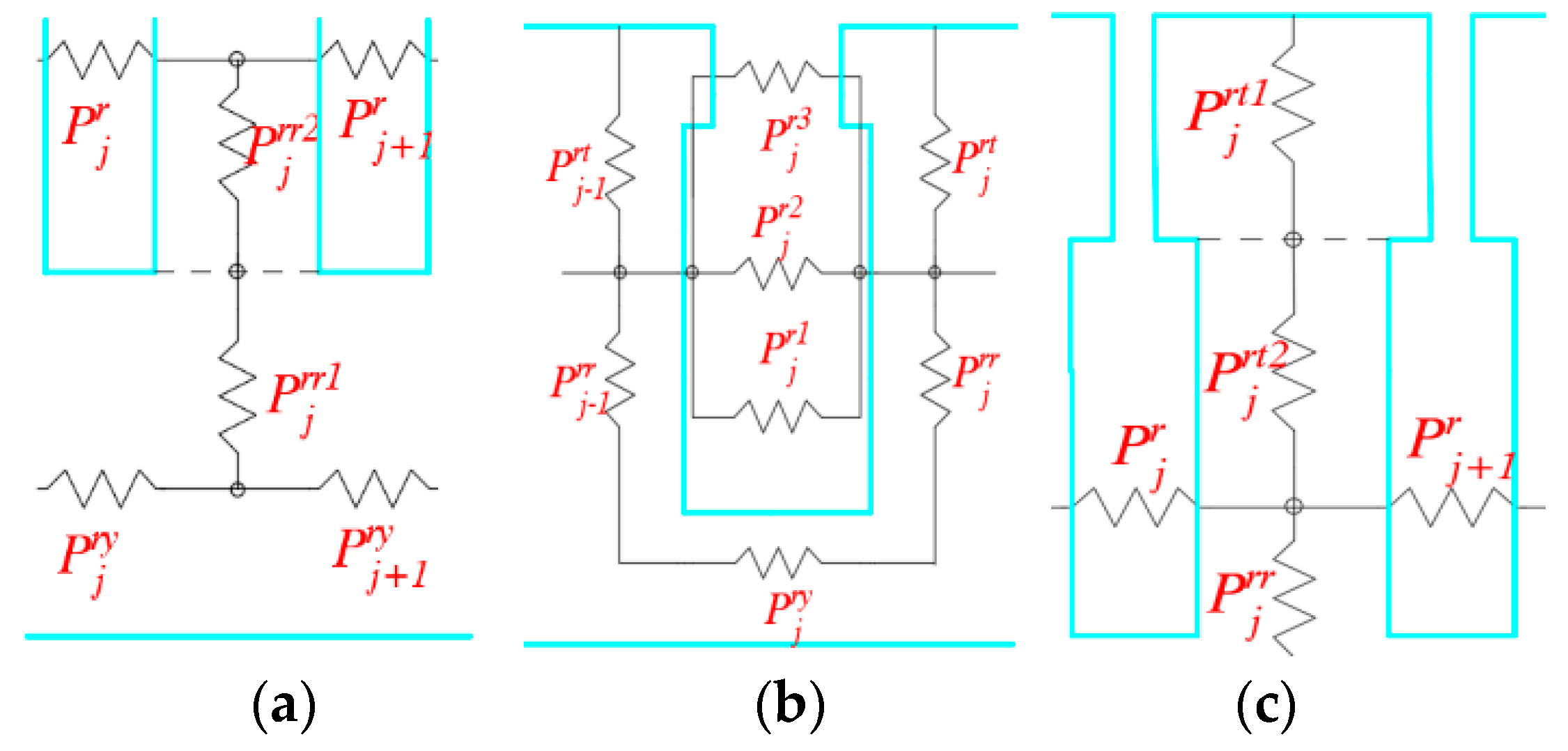
3.2. Calculation of Permeability
3.3. Calculation of Induced Voltage
- Through (19) to (29), the permeability , , , and of each node of the rotor X and Y are calculated, respectively.
- Through Equations (30)–(42), calculating the air gap permeability and the permeability , , and of the stator nodes.
- By Equations (17) or (18), the magnetic potential at the middle of stator teeth is calculated.
- Updating excitation current and by Equations (45)
- Again, by Equations (18) and (19), the magnetic potential at the middle of the teeth of rotor X and Y is calculated, respectively.
- Through respectively calculating the induced voltage and of rotor X and Y by Equations (43) and (44).
- When rotating, the air gap permeability changes, and the induced voltage is recalculated by repeating processes 3–6.
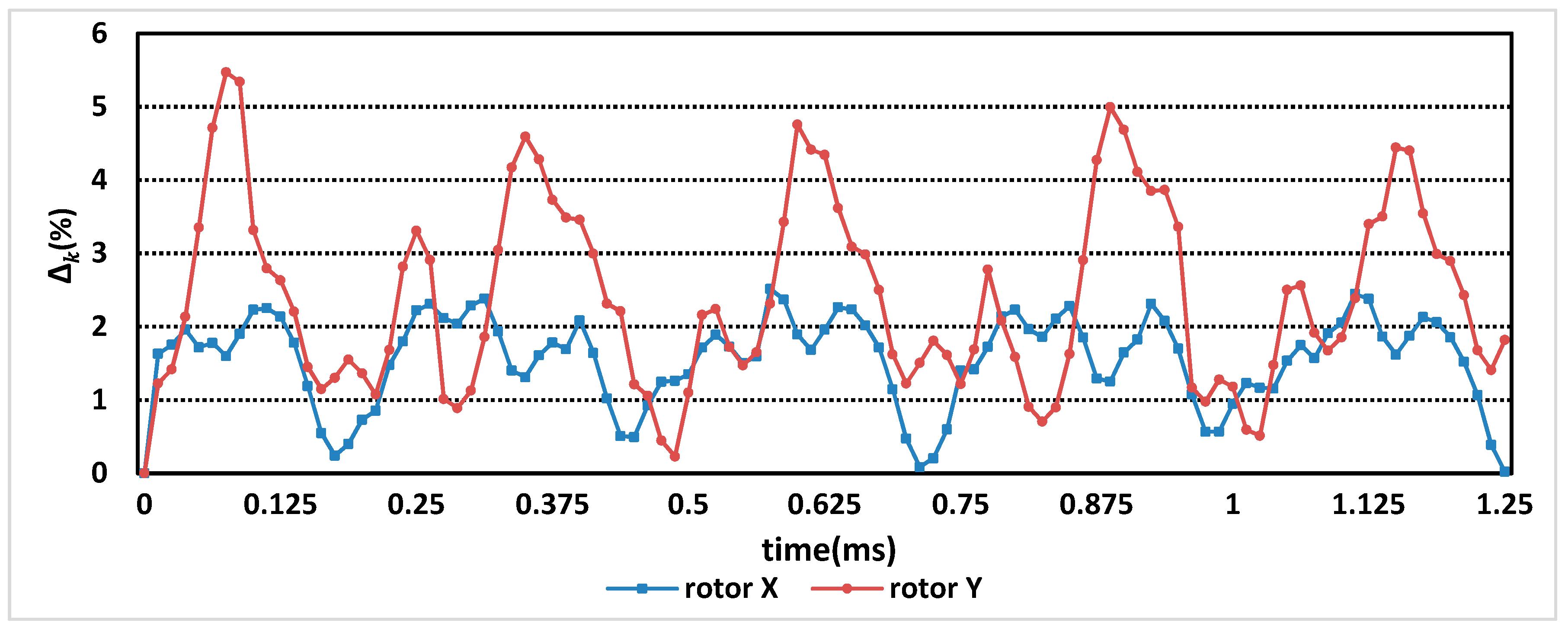
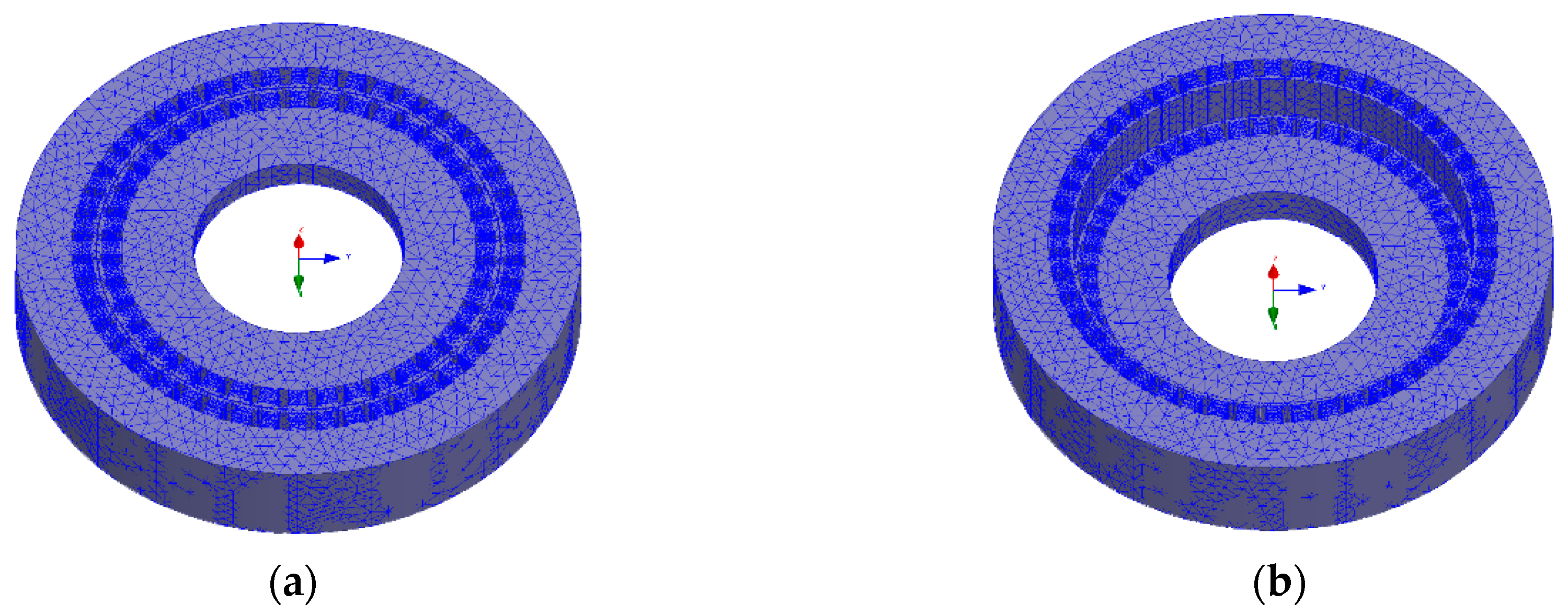
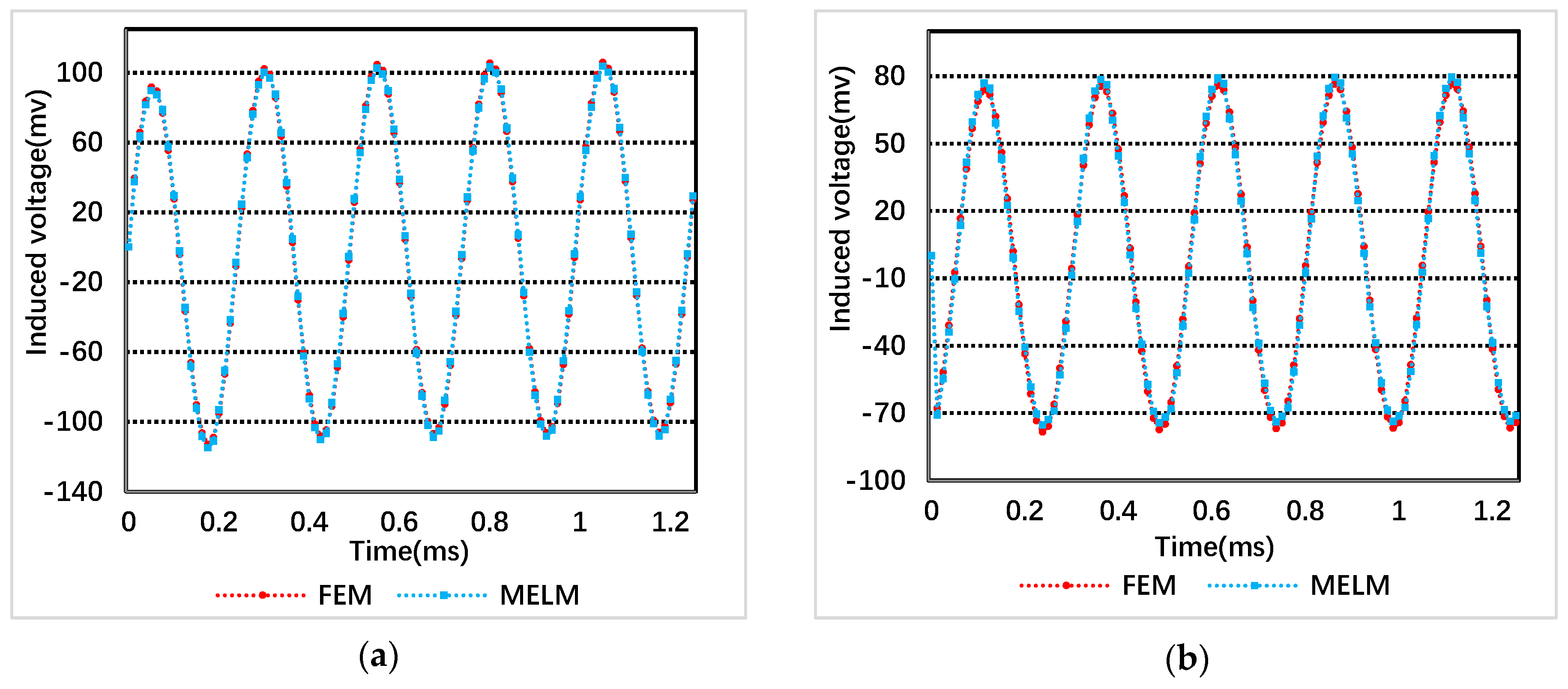
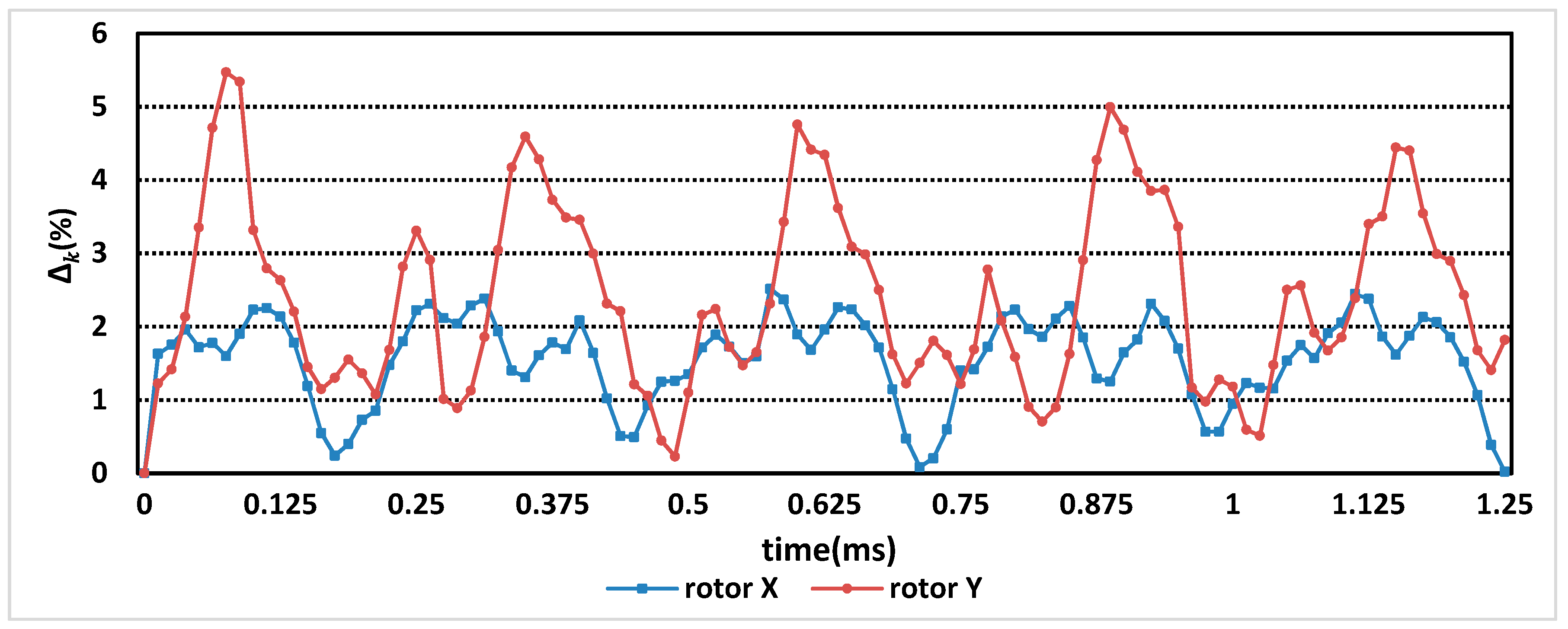
3.4. Simulation Verification
4. Optimal Design with MELM
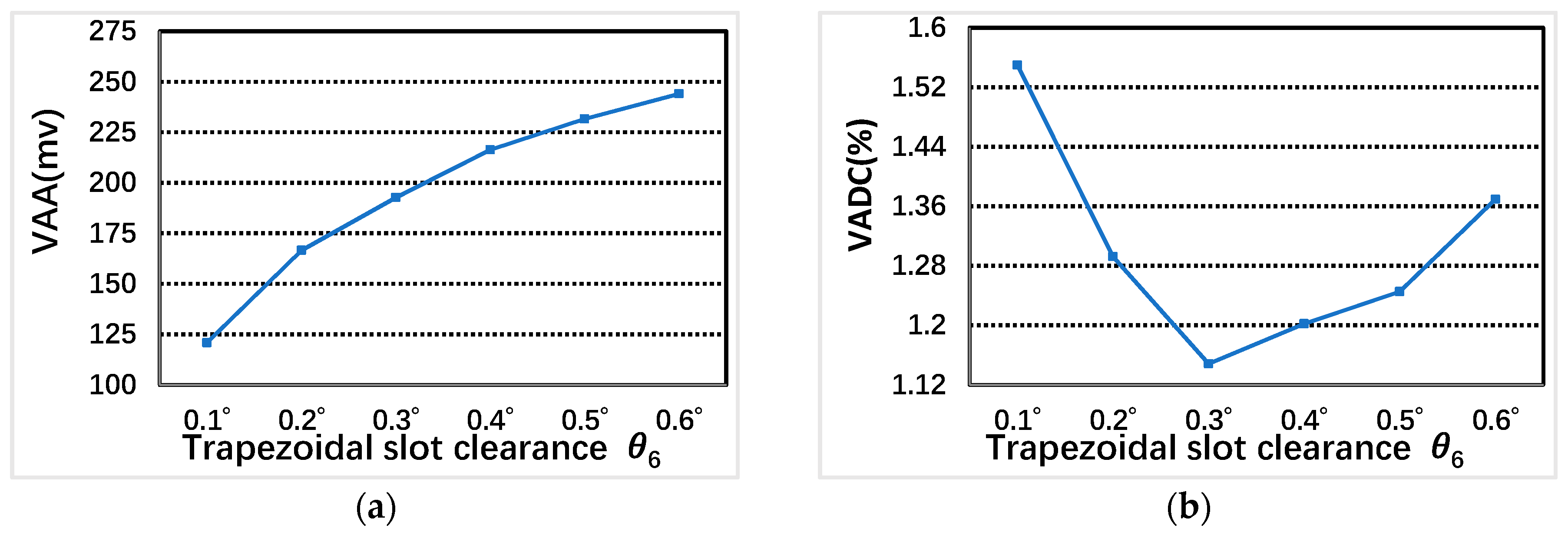
4.1. Trapezoidal Groove Clearance
4.2. Trapezoidal Groove Height
4.3. Stator Teeth Width
4.4. Air-Gap Length
5. Experimental Verification
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Jordi, N.; Jan, C.; Ali, K.; Christophe, F.; Ferran, M. Angular displacement and velocity sensors based on coplanar waveguides (CPWs) Loaded with S-Shaped Split Ring Resonators (S-SRR). Sensors 2015, 15, 9628–9650. [Google Scholar]
- Michael, F.G. Optical measurement of angular deformation and torque inside a working drillstring. IEEE Trans. Instrum. Meas. 2016, 65, 1895–1901. [Google Scholar]
- Jian, L.; Dan, W.; Yan, H. A missile-borne angular velocity sensor Based on Triaxial Electromagnetic Induction Coils. Sensors 2016, 16, 1625–1632. [Google Scholar]
- Abhishek, K.J.; Nicolò, D.; Adam, L.; Michal, M.; Maurizio, B. Design of microwave-based angular displacement sensor. IEEE Microw. Wirel. Compon. Lett. 2019, 29, 306–308. [Google Scholar]
- Binghui, J.; Lei, H.; Guodong, Y.; Yong, F. A Differential reflective intensity optical fiber angular displacement sensor. Sensors 2016, 16, 1508–1515. [Google Scholar]
- Berkovic, G.; Shafir, E. Optical methods for distance and displacement measurements. Adv. Opt. Photon. 2012, 4, 441–471. [Google Scholar] [CrossRef]
- Liu, X.; Peng, K.; Chen, Z.; Pu, H.; Yu, Z. A new capacitive displacement sensor with nanometer accuracy and long range. IEEE Sens. J. 2016, 16, 2306–2316. [Google Scholar] [CrossRef]
- Dinulovic, D.; Hermann, D.; Fluegge, J.; Gatzen, H.H. Development of a linear micro-inductosyn sensor. IEEE Trans. Magn. 2006, 42, 2830–2832. [Google Scholar] [CrossRef]
- Ramin, A.S.; Zahra, N.G.; Farid, T.; Hashem, O. Improved winding proposal for wound rotor resolver using genetic algorithm and winding function approach. IEEE Trans. Ind. Electron. 2019, 66, 1325–1334. [Google Scholar]
- Farid, T. Effect of damper winding on accuracy of wound-rotor resolver under static-, dynamic- and mixed-eccentricities. IET Electr. Power Appl. 2018, 12, 845–851. [Google Scholar]
- Peng, D.L.; Fu, M.; Chen, X.H.; Liu, X.K.; Tang, Q.F.; WU, L. Classification study on typical displacement sensors and analysis on the characteristics of time grating sensors. J. Mechan Eng. 2018, 54, 36–42. [Google Scholar] [CrossRef]
- Tang, Q.F.; Wu, L.; Chen, X.H.; Peng, D.L. An inductive linear displacement sensor based on planar coils. IEEE Sens. J. 2018, 18, 5256–5264. [Google Scholar] [CrossRef]
- Gou, L.; Peng, D.L.; Chen, X.H.; Wu, L.; Tang, Q.F. A self-calibration method for angular displacement sensor working in harsh environments. IEEE Sens. J. 2019, 19, 3033–3040. [Google Scholar] [CrossRef]
- Tang, Q.F.; Peng, D.L.; Wu, L.; Chen, X.H. An inductive angular displacement sensor based on planar coil and contrate rotor. IEEE Sens. J. 2015, 15, 3947–3954. [Google Scholar] [CrossRef]
- Wang, S.X.; Wu, Z.Y.; Peng, D.L.; Chen, S.; Zhang, Z.; Liu, S.Y. Sensing mechanism of a rotary magnetic encoder based on time grating. IEEE Sens. J. 2018, 18, 3677–3683. [Google Scholar] [CrossRef]
- Luo, P.G.; Tang, Q.F.; Jing, H.; Chen, X.H. Design and development of a self-calibration based inductive absolute angular position sensor. IEEE Sens. J. 2019. [Google Scholar] [CrossRef]
- Abolqasemi-Kharanaq, F.; Alipour-Sarabi, R.; Nasiri-Gheidari, Z.; Tootoonchian, F. Magnetic equivalent circuit model for wound rotor resolver without rotary transformer’s core. IEEE Sens. J. 2018, 18, 8693–8700. [Google Scholar] [CrossRef]
- Wang, X.S.; Wu, Z.Y.; Peng, D.L.; Li, W.S.; Chen, S.; Liu, S.Y. An angle displacement sensor using a simple gear. Sens. Actuators A 2018, 270, 245–251. [Google Scholar] [CrossRef]
- Tang, Q.F. Study on Time Grating Displacement Sensor Based on Precise Confine Method of Time-Varying Magnetic Field. Ph.D. Thesis, Chongqing University, Chongqing, China, September 2015. [Google Scholar]
- Tang, Q.F.; Peng, D.L.; Wu, L.; Chen, X.H.; Sun, S.Z. Study on the influence of Doppler effect and its suppressing method in time grating angular displacement sensor. Chin. J. Sci. Instrum. 2014, 34, 620–626. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Size Symbol | Structural Parameters |
|---|---|
| (mm) | |
| (mm) | |
| (mm) | |
| (mm) |
| Electrical Symbols | Electrical Parameters |
|---|---|
| Excitation voltage frequency (kHz) | 4 |
| Excitation voltage amplitude (V) | 5 |
| Excitation coil resistance (Ω) | 10 |
| Inducted coil resistance (MΩ) | 10 |
| Excitation coil maximum turns | 20 |
| Inducted coil turns | 1 |
| Rotate speed (r/min) | 20 |
| Size Symbol | Structural Parameters |
|---|---|
| (mm) | |
| (mm) | |
| (mm) | |
| (mm) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, P.; Tang, Q.; Jing, H. Optimal Design of Angular Displacement Sensor with Shared Magnetic Field Based on the Magnetic Equivalent Loop Method. Sensors 2019, 19, 2207. https://doi.org/10.3390/s19092207
Luo P, Tang Q, Jing H. Optimal Design of Angular Displacement Sensor with Shared Magnetic Field Based on the Magnetic Equivalent Loop Method. Sensors. 2019; 19(9):2207. https://doi.org/10.3390/s19092207
Chicago/Turabian StyleLuo, Pinggui, Qifu Tang, and Huan Jing. 2019. "Optimal Design of Angular Displacement Sensor with Shared Magnetic Field Based on the Magnetic Equivalent Loop Method" Sensors 19, no. 9: 2207. https://doi.org/10.3390/s19092207
APA StyleLuo, P., Tang, Q., & Jing, H. (2019). Optimal Design of Angular Displacement Sensor with Shared Magnetic Field Based on the Magnetic Equivalent Loop Method. Sensors, 19(9), 2207. https://doi.org/10.3390/s19092207