The Effects of Dimensions on the Deformation Sensing Performance of Ionic Polymer-Metal Composites




Abstract
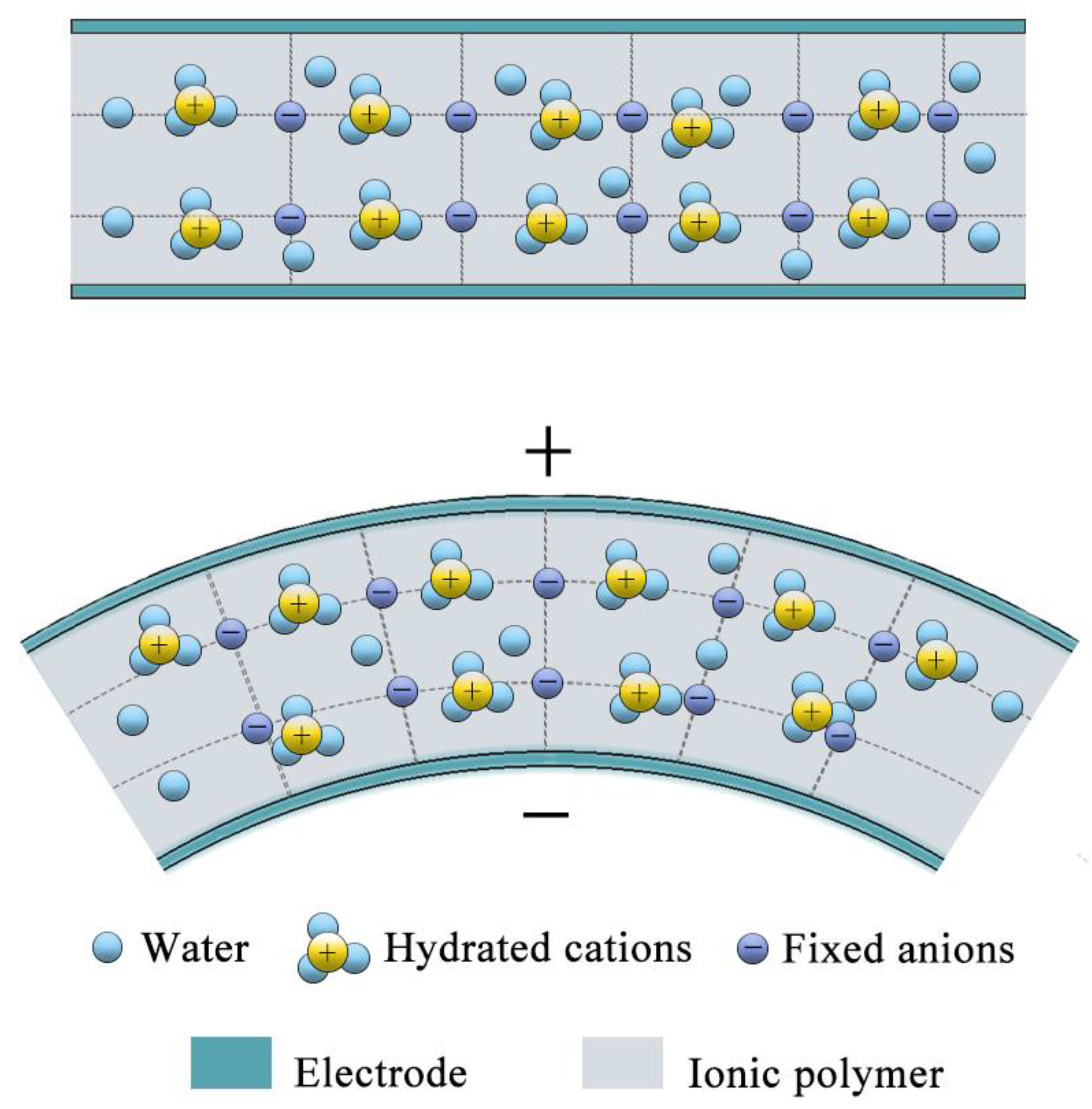
1. Introduction
2. Experimental Methods
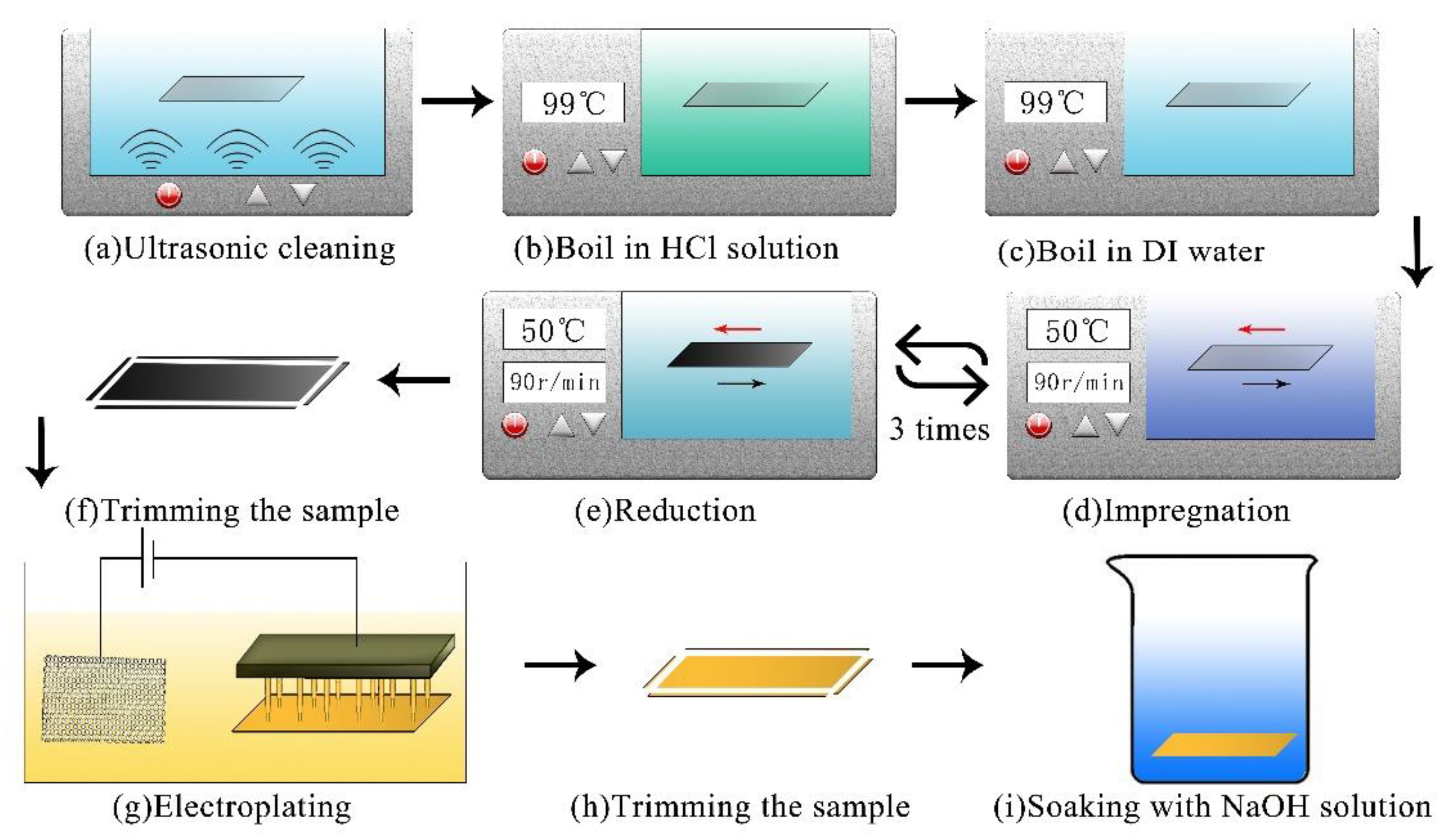
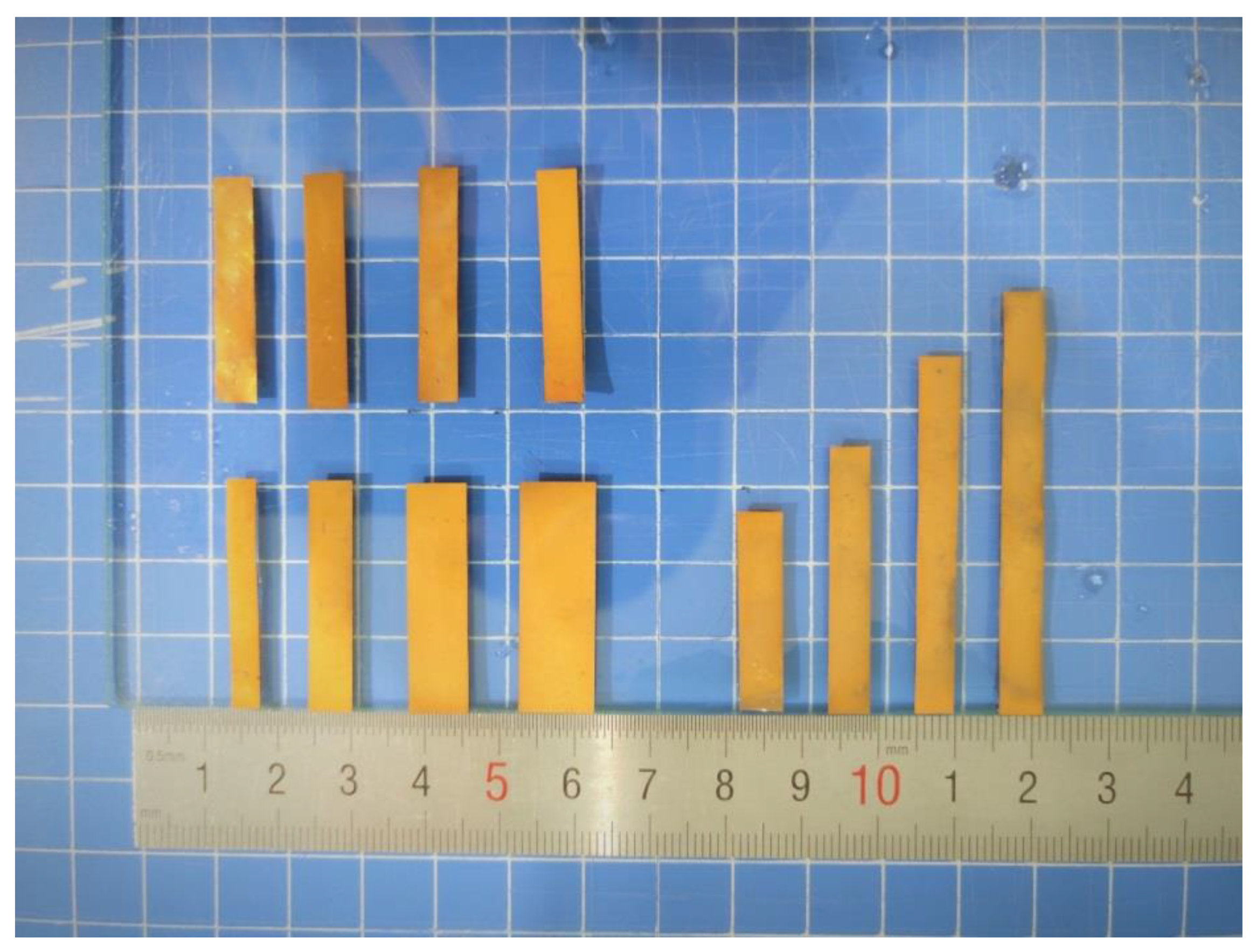
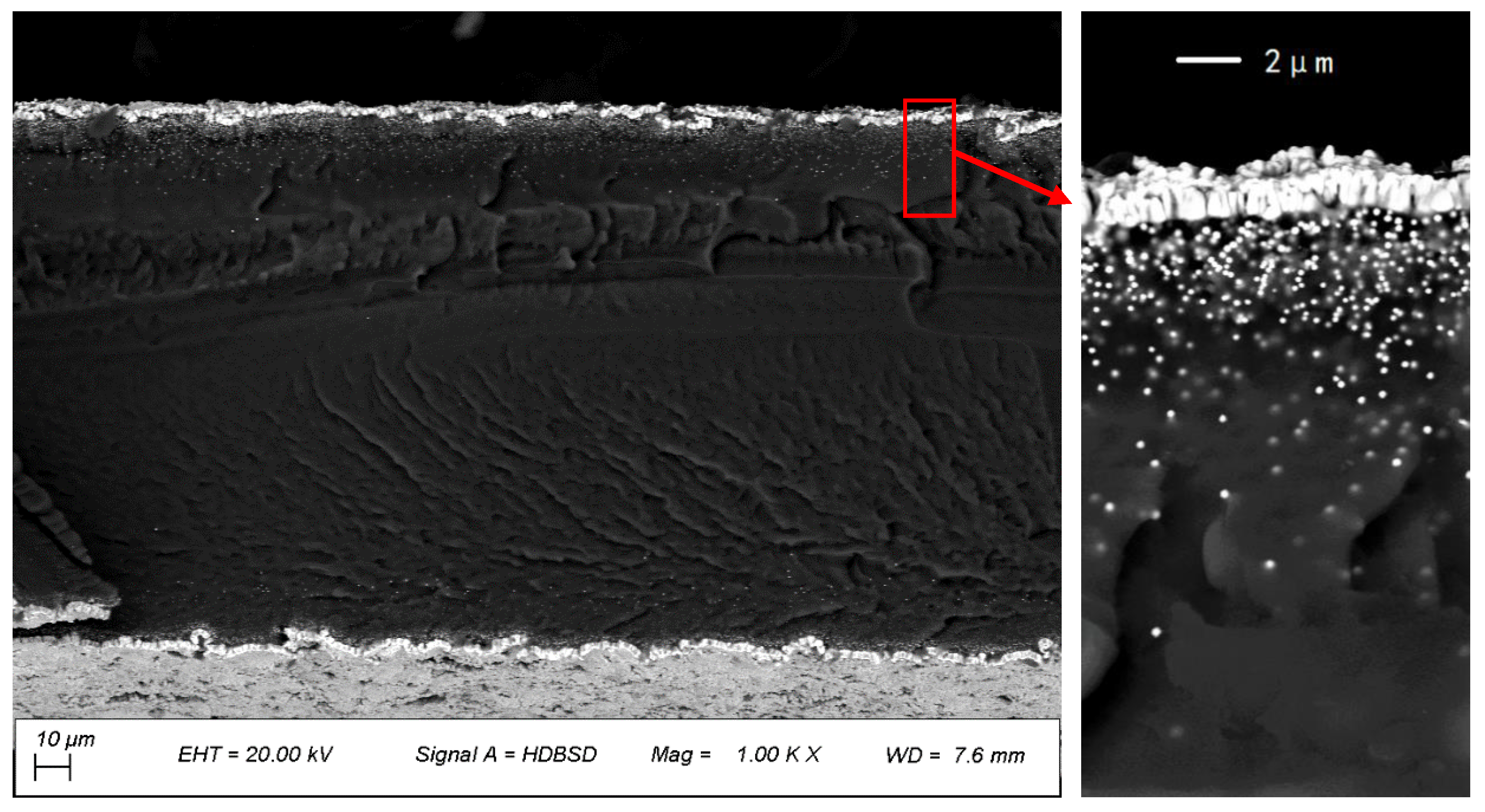
2.1. Fabrication of IPMC
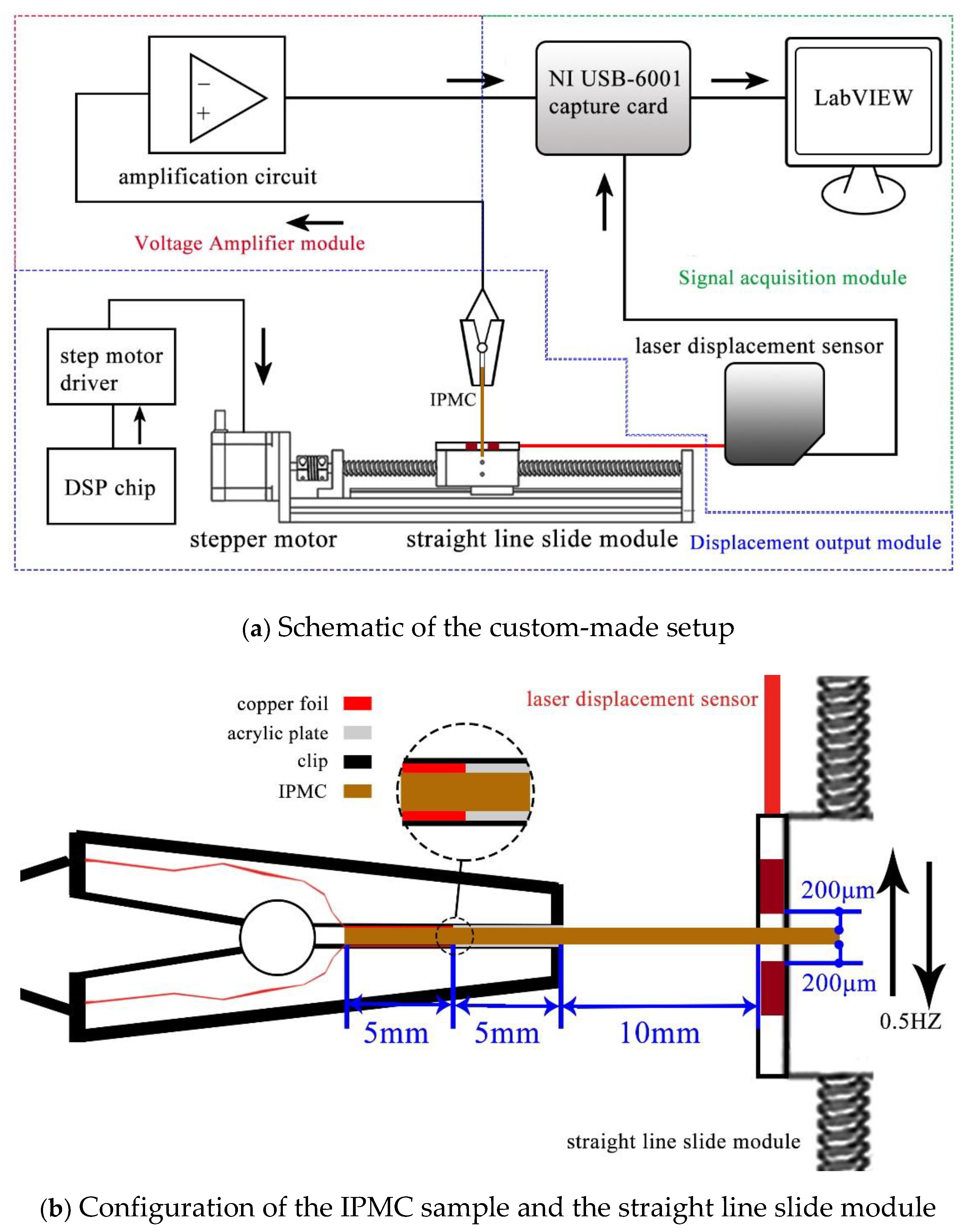
2.2. Electromechanical Sensing Test Platform
3. Results and Discussion
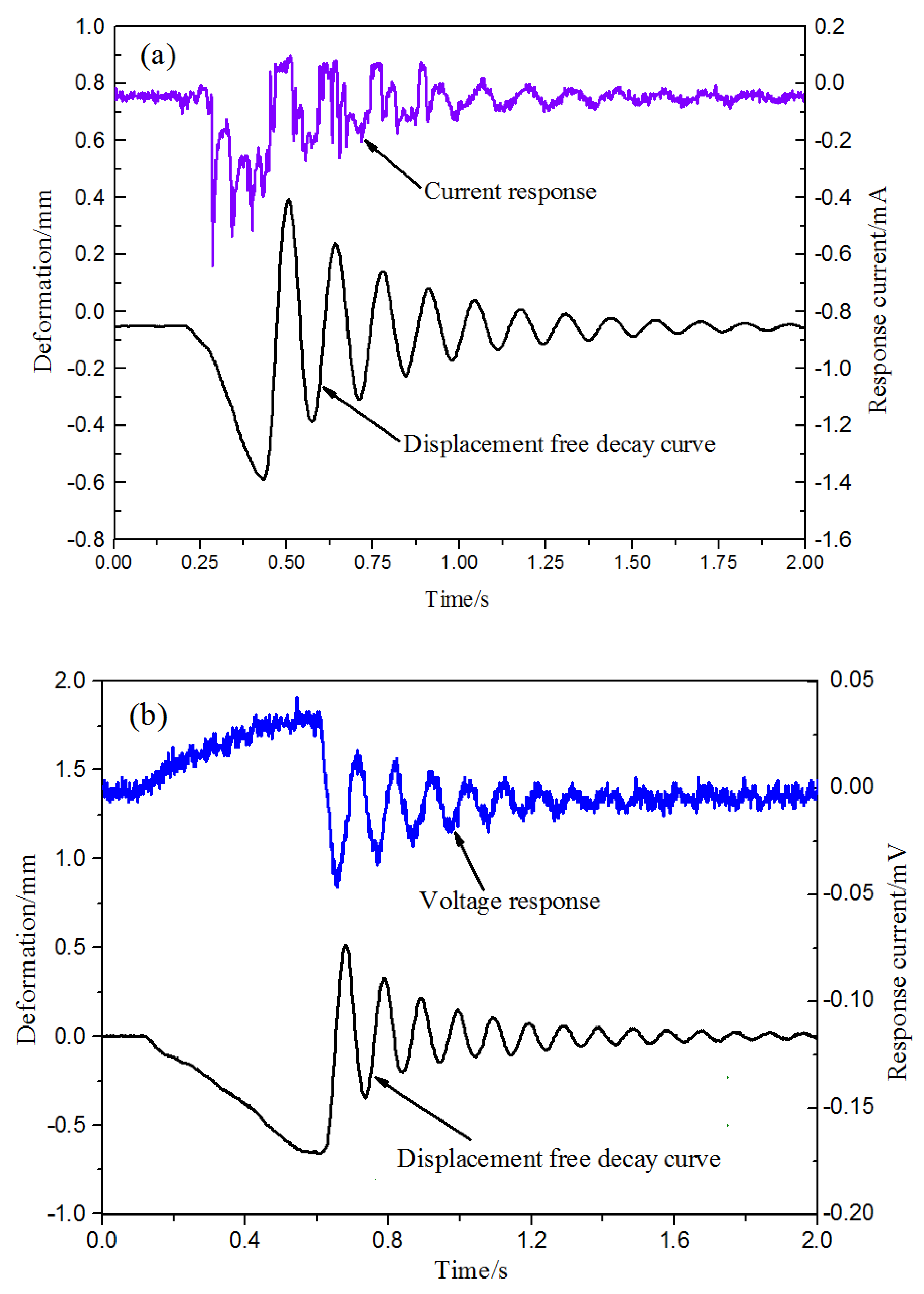
3.1. Comparison of the Current Amplification and the Voltage Amplification
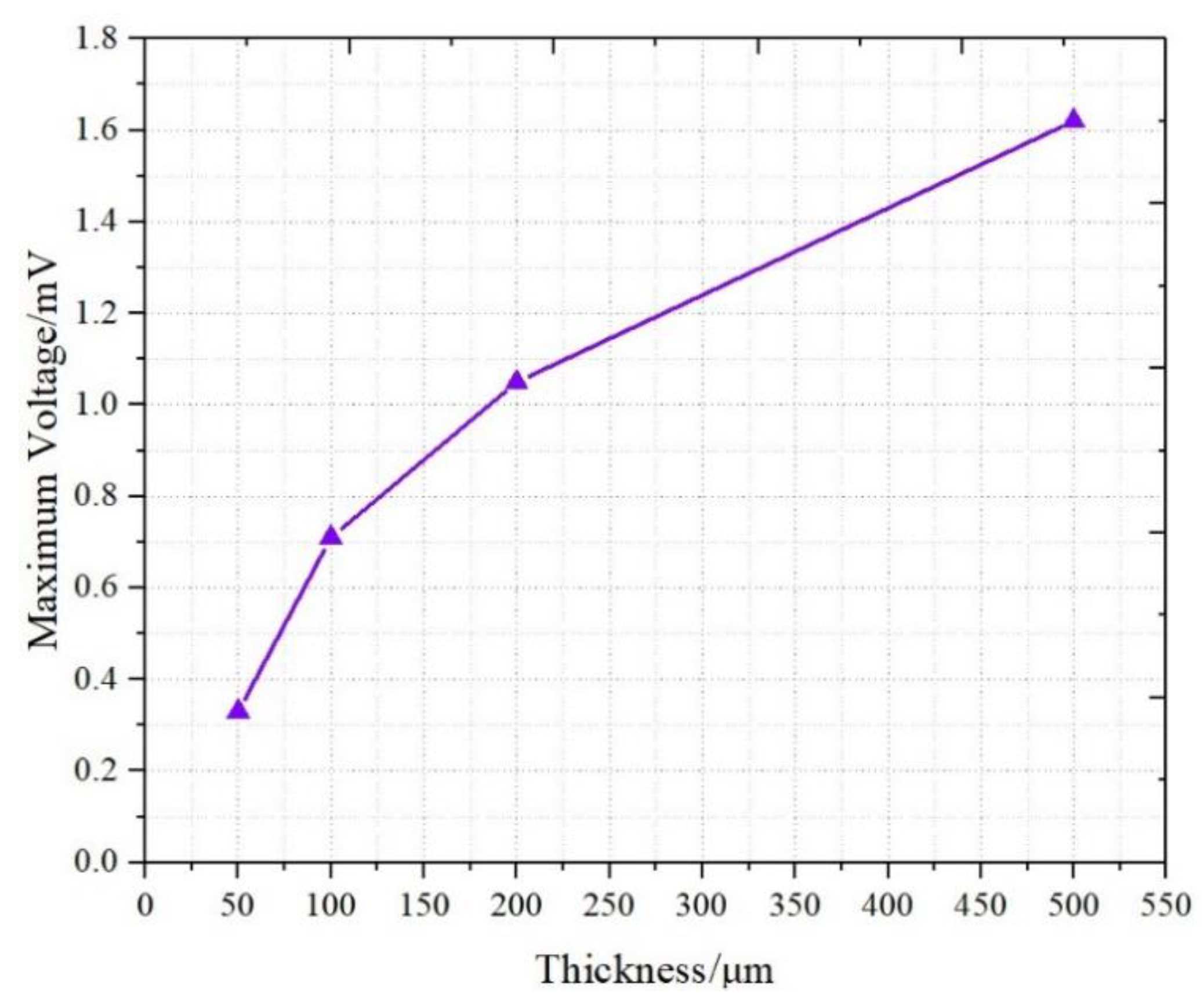
3.2. Thickness Effect on the Deformation Sensing of IPMC
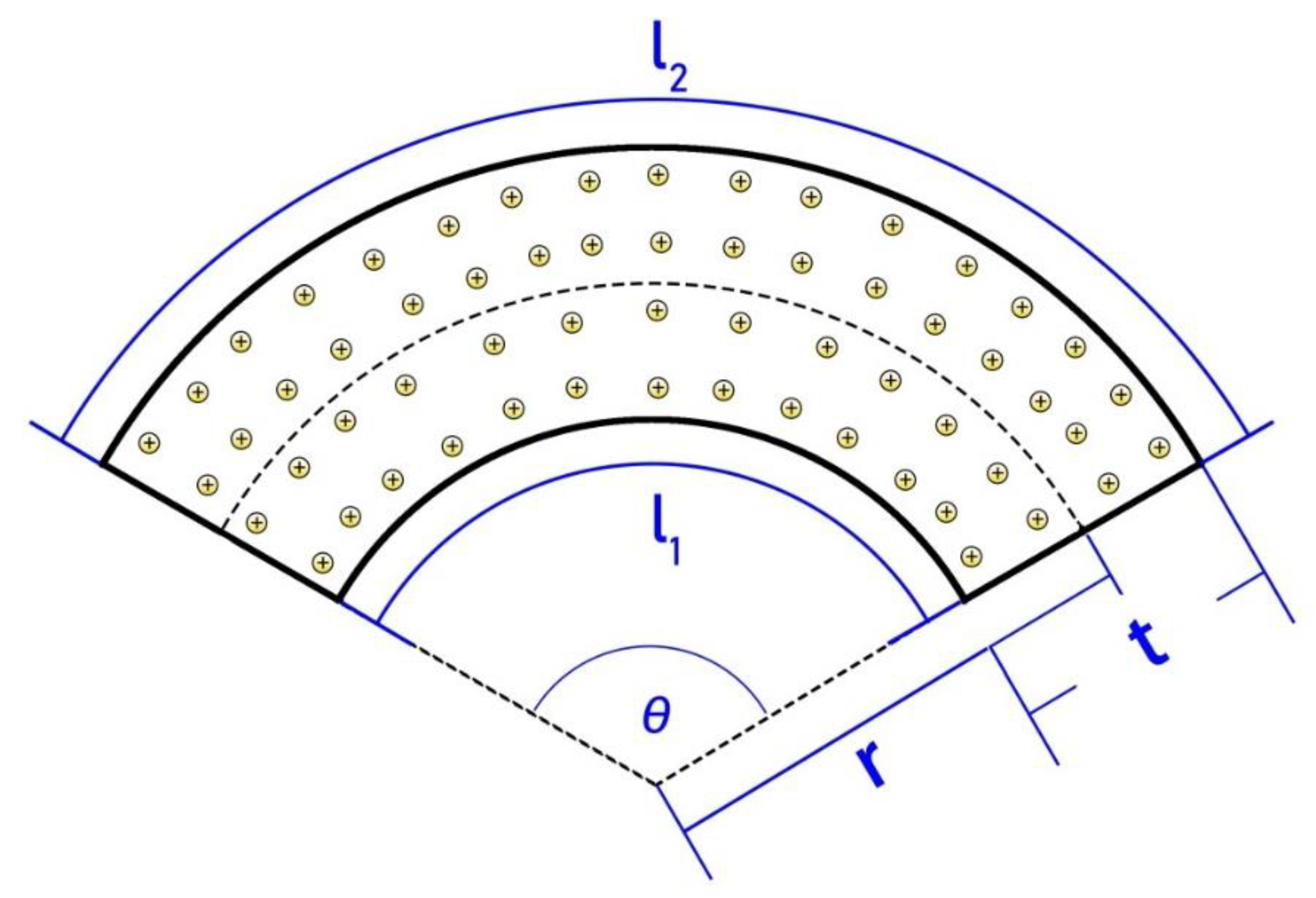
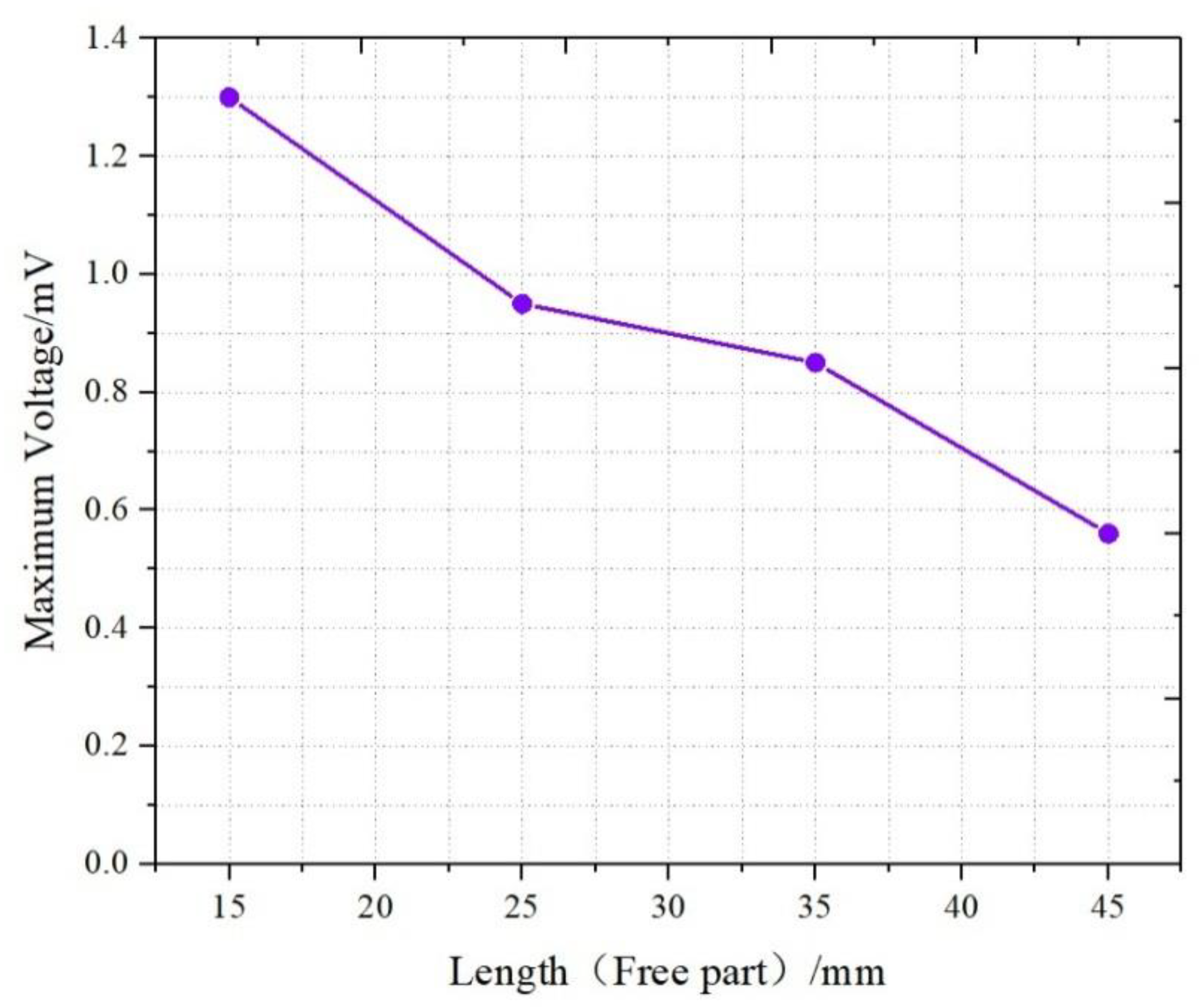
3.3. The Effect of Length on Deformation Sensing of IPMC
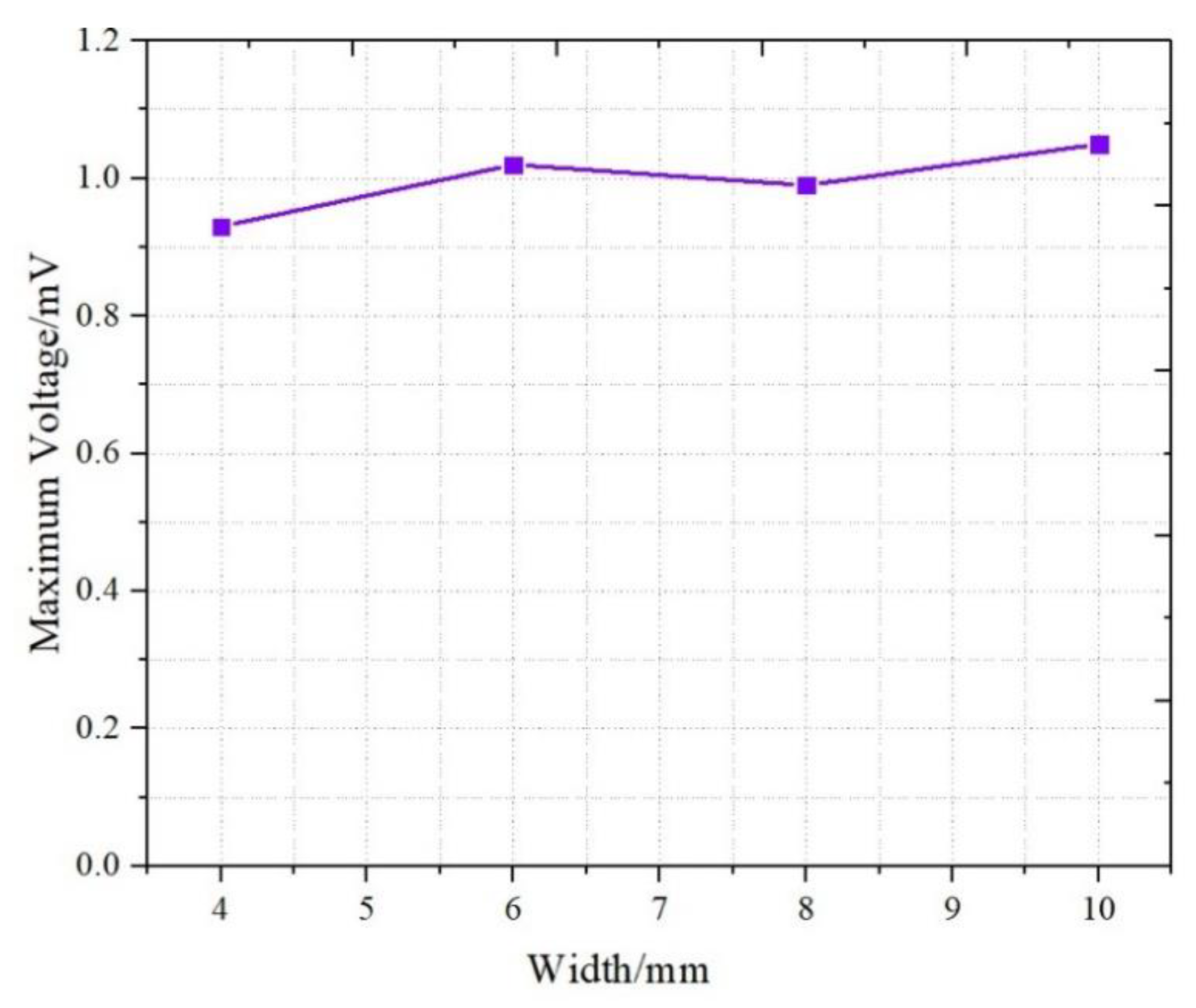
3.4. The Effect of Width on Deformation Sensing of IPMC
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bhandari, B.; Lee, G.Y.; Ahn, S.H. A review on IPMC material as actuators and sensors: Fabrications, characteristics and applications. Int. J. Precis. Eng. Manuf. 2012, 13, 141–163. [Google Scholar] [CrossRef]
- Shahinpoor, M.; Bar-Cohen, Y.; Simpson, J.O.; Smith, J. Ionic polymer-metal composites (IPMCs) as biomimetic sensors, actuators and artificial muscles-a review. Smart Mater. Struct. 1998, 7, R15. [Google Scholar] [CrossRef]
- Jo, C.; Pugal, D.; Oh, I.K.; Kim, K.J.; Asaka, K. Recent advances in ionic polymer–metal composite actuators and their modeling and applications. Prog. Polym. Sci. 2013, 38, 1037–1066. [Google Scholar] [CrossRef]
- Bian, C.; Ru, J.; Zhu, Z.; Luo, B.; Chen, H. A three-electrode structured ionic polymer carbon-composite actuator with improved electromechanical performance. Smart Mater. Struct. 2018, 27, 085017. [Google Scholar] [CrossRef]
- Chang, L.; Yu, L.; Li, C.; Niu, Q.; Hu, Y.; Lu, P.; Zhu, Z.; Wu, Y. Ionic polymer with single-layered electrodes: a novel strategy for ionic actuator design. Smart Mater. Struct. 2018, 27, 105046. [Google Scholar] [CrossRef]
- Tiwari, R.; Kim, K.J. IPMC as a mechanoelectric energy harvester: tailored properties. Smart Mater. Struct. 2012, 22, 015017. [Google Scholar] [CrossRef]
- Shahinpoor, M.; Kim, K.J. Ionic polymer–metal composites: III. Modeling and simulation as biomimetic sensors, actuators, transducers, and artificial muscles. Smart Mater. Struct. 2004, 13, 1362. [Google Scholar] [CrossRef]
- Akle, B.; Najem, J.; Leo, D.; Blottman, J. Design and development of bio-inspired underwater jellyfish like robot using ionic polymer metal composite (IPMC) actuators. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 6–10 March 2011. [Google Scholar]
- Cheong, H.R.; Nguyen, N.T.; Khaw, M.K.; Teoh, B.Y.; Chee, P.S. Wirelessly activated device with an integrated ionic polymer metal composite (IPMC) cantilever valve for targeted drug delivery. Lab Chip 2018, 18, 3207–3215. [Google Scholar] [CrossRef] [PubMed]
- Feng, G.H.; Tsai, J.W. Micromachined optical fiber enclosed 4-electrode IPMC actuator with multidirectional control ability for biomedical application. Biomed. Microdevices 2011, 13, 169–177. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Wang, Y.; Hu, X.; Sun, X.; Chang, L.; Lu, P. An easily fabricated high performance ionic polymer based sensor network. Appl. Phys. Lett. 2016, 109, 073504. [Google Scholar] [CrossRef]
- Santos, J.; Lopes, B.; Branco, P.J.C. Ionic polymer–metal composite material as a diaphragm for micropump devices. Sens. Actuators A 2010, 161, 225–233. [Google Scholar] [CrossRef]
- Pugal, D.; Jung, K.; Aabloo, A.; Kim, K.J. Ionic polymer–metal composite mechanoelectrical transduction: Review and perspectives. Polym. Int. 2010, 59, 279–289. [Google Scholar] [CrossRef]
- Bonomo, C.; Fortuna, L.; Giannone, P.; Graziani, S. A method to characterize the deformation of an IPMC sensing membrane. Sens. Actuators A 2005, 123, 146–154. [Google Scholar] [CrossRef]
- Bahramzadeh, Y.; Shahinpoor, M. Dynamic curvature sensing employing ionic-polymer–metal composite sensors. Smart Mater. Struct. 2011, 20, 094011. [Google Scholar] [CrossRef]
- Newbury, K.M.; Leo, D.J. Electromechanical modeling and characterization of ionic polymer benders. J. Intell. Mater. Syst. Struct. 2002, 13, 51–60. [Google Scholar] [CrossRef]
- Sadeghipour, K.; Salomon, R.; Neogi, S. Development of a novel electrochemically active membrane and’smart’material based vibration sensor/damper. Smart Mater. Struct. 1992, 1, 172. [Google Scholar] [CrossRef]
- Shahinpoor, M.; Bar-Cohen, Y.; Xue, T.; Harrison, J.S.; Smith, J.G. Some experimental results on ionic polymer-metal composites (IPMC) as biomimetic sensors and actuators. In Proceedings of the 5th Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, 1–5 March 1998; pp. 251–268. [Google Scholar]
- Konyo, M.; Konishi, Y.; Tadokoro, S.; Kishima, T. Development of velocity sensor using ionic polymer-metal composites. In Proceedings of the Smart Structures and Materials, San Diego, CA, USA, 14–18 March 2004; pp. 307–319. [Google Scholar]
- Takagi, K.; Nakabo, Y.; Luo, Z.W.; Asaka, K. On a distributed parameter model for electrical impedance of ionic polymer. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 18–22 March 2007. [Google Scholar]
- Zhu, Z.; Horiuchi, T.; Kruusamae, K.; Chang, L.; Asaka, K. Influence of Ambient Humidity on the Voltage Response of Ionic Polymer–Metal Composite Sensor. J. Phys. Chem. B 2016, 120, 3215–3225. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Hu, Y.; Zhao, J.; Wu, G.; Tao, X.; Chen, W. Self-powered piezoionic strain sensor toward the monitoring of human activities. Small 2016, 12, 5074–5080. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Liu, J.; Zhu, Y.; Zhu, D.; Chen, H. Formation and characterization of dendritic interfacial electrodes inside an ionomer. ACS Appl. Mater. Interfaces 2017, 9, 30258–30262. [Google Scholar] [CrossRef] [PubMed]
- Aureli, M.; Lin, W.; Porfiri, M. On the capacitance-boost of ionic polymer metal composites due to electroless plating: Theory and experiments. J. Appl. Phys. 2009, 105, 104911. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Thickness (μm) | Length (mm) | Clamped Part (mm) | Free Part (mm) | Width (mm) |
|---|---|---|---|---|---|
| T1 | 50 | 30 | 10 | 20 | 5 |
| T2 | 100 | 30 | 10 | 20 | 5 |
| T3 | 200 | 30 | 10 | 20 | 5 |
| T4 | 500 | 30 | 10 | 20 | 5 |
| L1 | 200 | 25 | 10 | 15 | 5 |
| L2 | 200 | 35 | 10 | 25 | 5 |
| L3 | 200 | 45 | 10 | 35 | 5 |
| L4 | 200 | 55 | 10 | 45 | 5 |
| W1 | 200 | 30 | 10 | 20 | 4 |
| W2 | 200 | 30 | 10 | 20 | 6 |
| W3 | 200 | 30 | 10 | 20 | 8 |
| W4 | 200 | 30 | 10 | 20 | 10 |
| Samples | T1 | T2 | T3 | T4 | L1 | L2 | L3 | L4 | W1 | W2 | W3 | W4 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Response Signals (mV) | 0.33 | 0.71 | 1.05 | 1.62 | 1.3 | 0.95 | 0.85 | 0.56 | 0.93 | 1.02 | 0.99 | 1.05 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Wang, Y.; Zhu, Z.; Wang, J.; He, Q.; Luo, M. The Effects of Dimensions on the Deformation Sensing Performance of Ionic Polymer-Metal Composites. Sensors 2019, 19, 2104. https://doi.org/10.3390/s19092104
Wang J, Wang Y, Zhu Z, Wang J, He Q, Luo M. The Effects of Dimensions on the Deformation Sensing Performance of Ionic Polymer-Metal Composites. Sensors. 2019; 19(9):2104. https://doi.org/10.3390/s19092104
Chicago/Turabian StyleWang, Jiale, Yanjie Wang, Zicai Zhu, Jiahui Wang, Qingsong He, and Minzhou Luo. 2019. "The Effects of Dimensions on the Deformation Sensing Performance of Ionic Polymer-Metal Composites" Sensors 19, no. 9: 2104. https://doi.org/10.3390/s19092104
APA StyleWang, J., Wang, Y., Zhu, Z., Wang, J., He, Q., & Luo, M. (2019). The Effects of Dimensions on the Deformation Sensing Performance of Ionic Polymer-Metal Composites. Sensors, 19(9), 2104. https://doi.org/10.3390/s19092104