High Accuracy Buoyancy for Underwater Gliders: The Uncertainty in the Depth Control †




Abstract
:1. Introduction
1.1. The Underwater Glider
1.1.1. AUV Evolution
1.1.2. The Underwater Glider
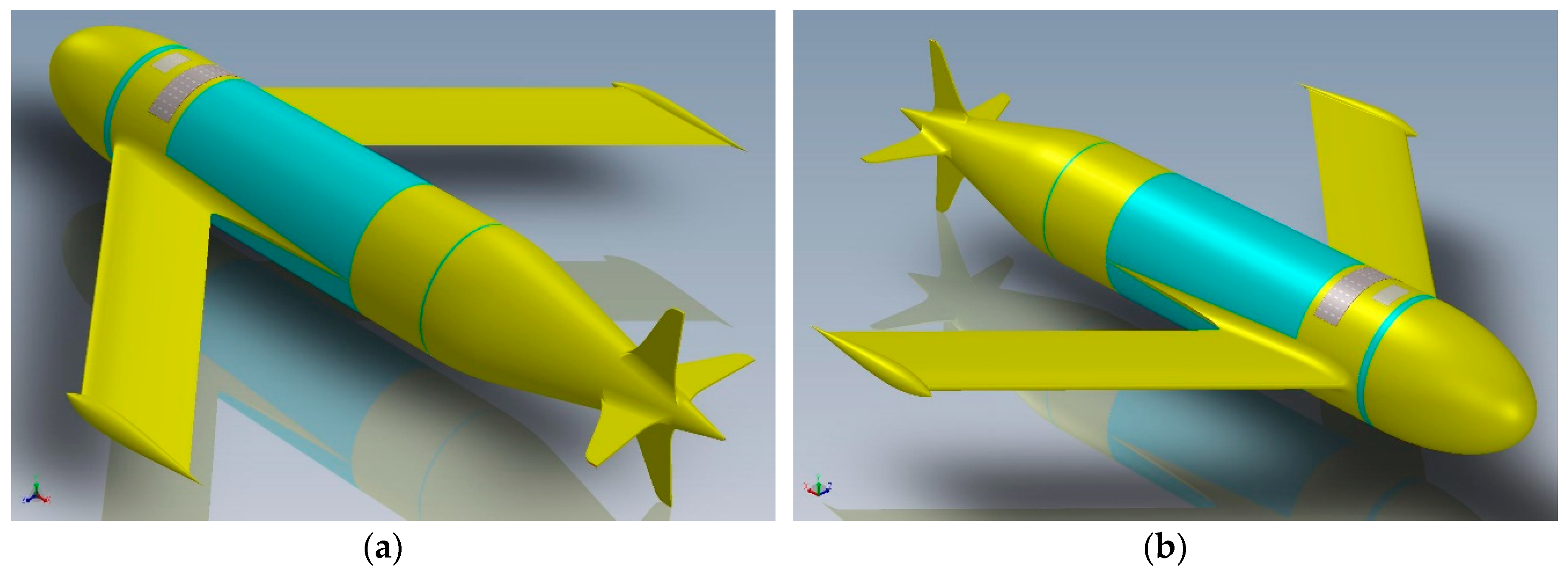
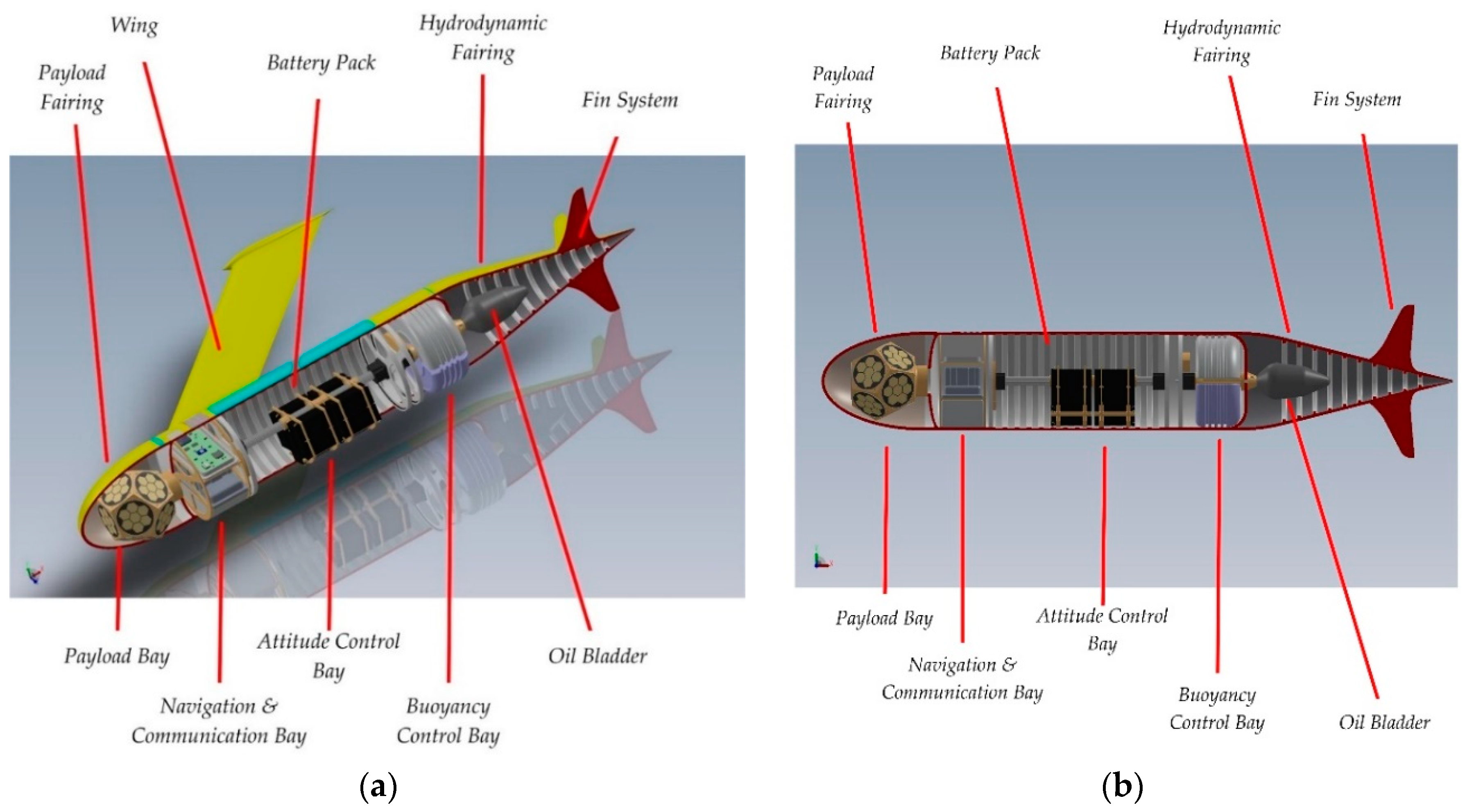
1.1.3. The Mk. III Architecture
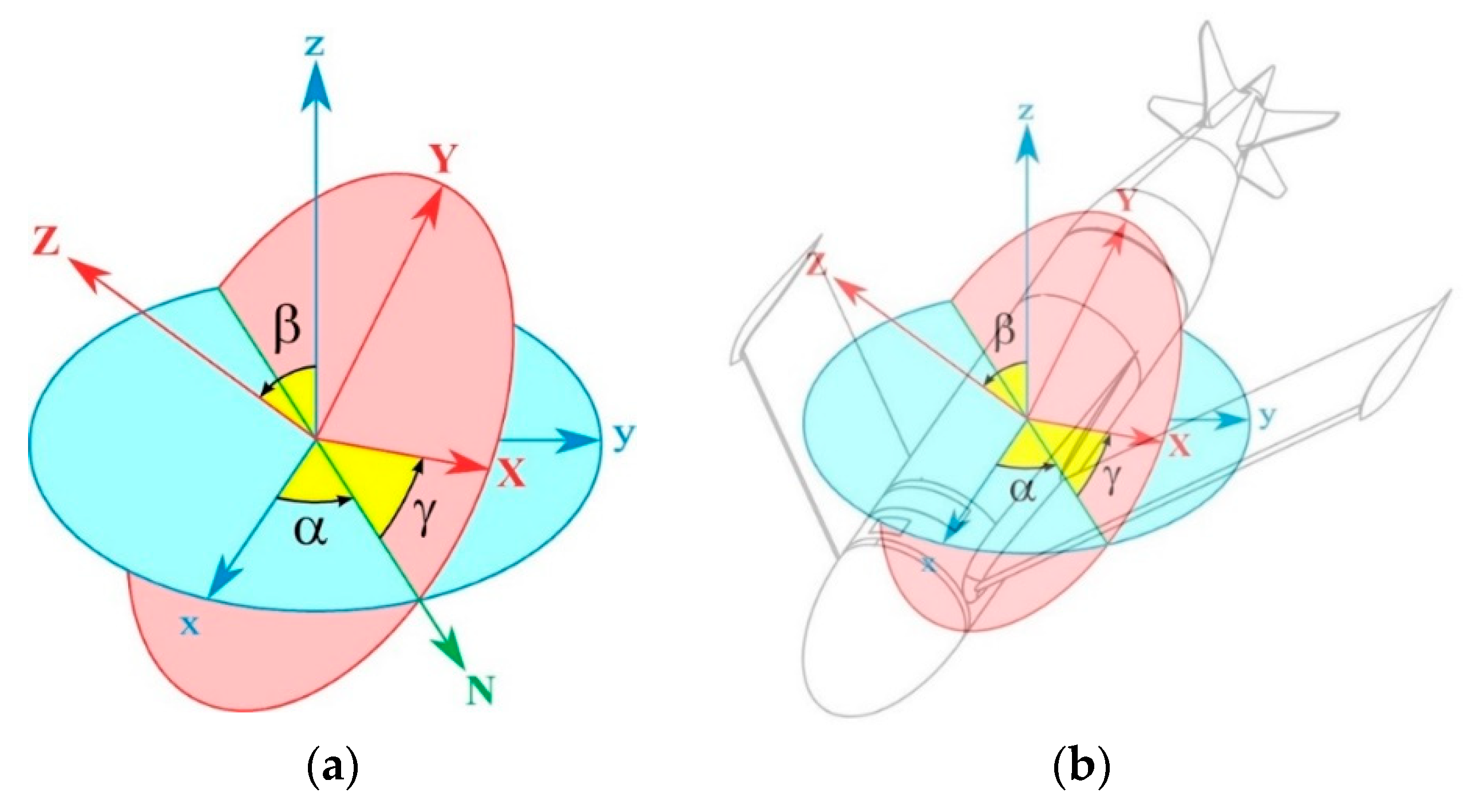
1.1.4. Conventions
- α (or φ) is the angle between the x axis and the N axis.
- β (or θ) is the angle between the z axis and the Z axis.
- γ (or ψ) is the angle between the N axis and the X axis.
2. Materials and Methods
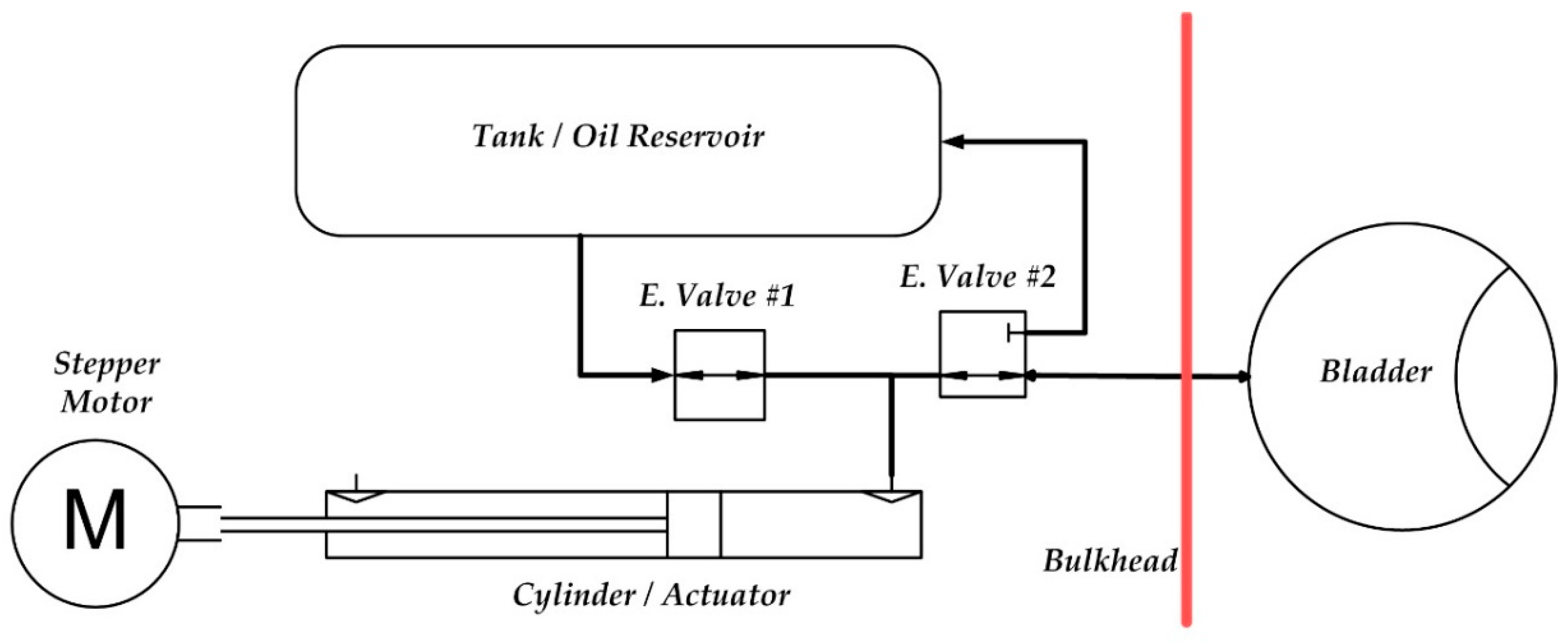
2.1. The Buoyancy System
2.1.1. Basic Concepts
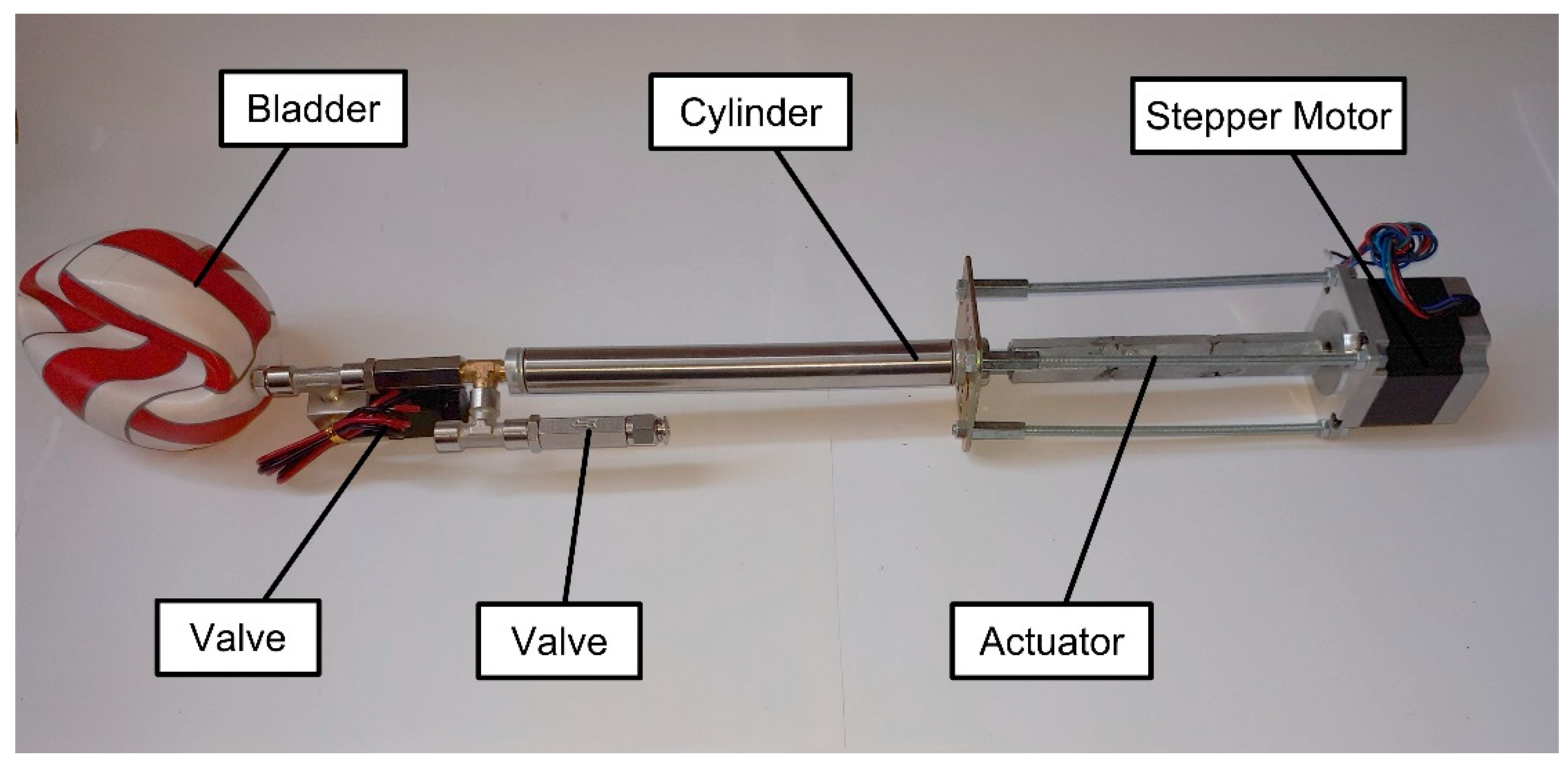
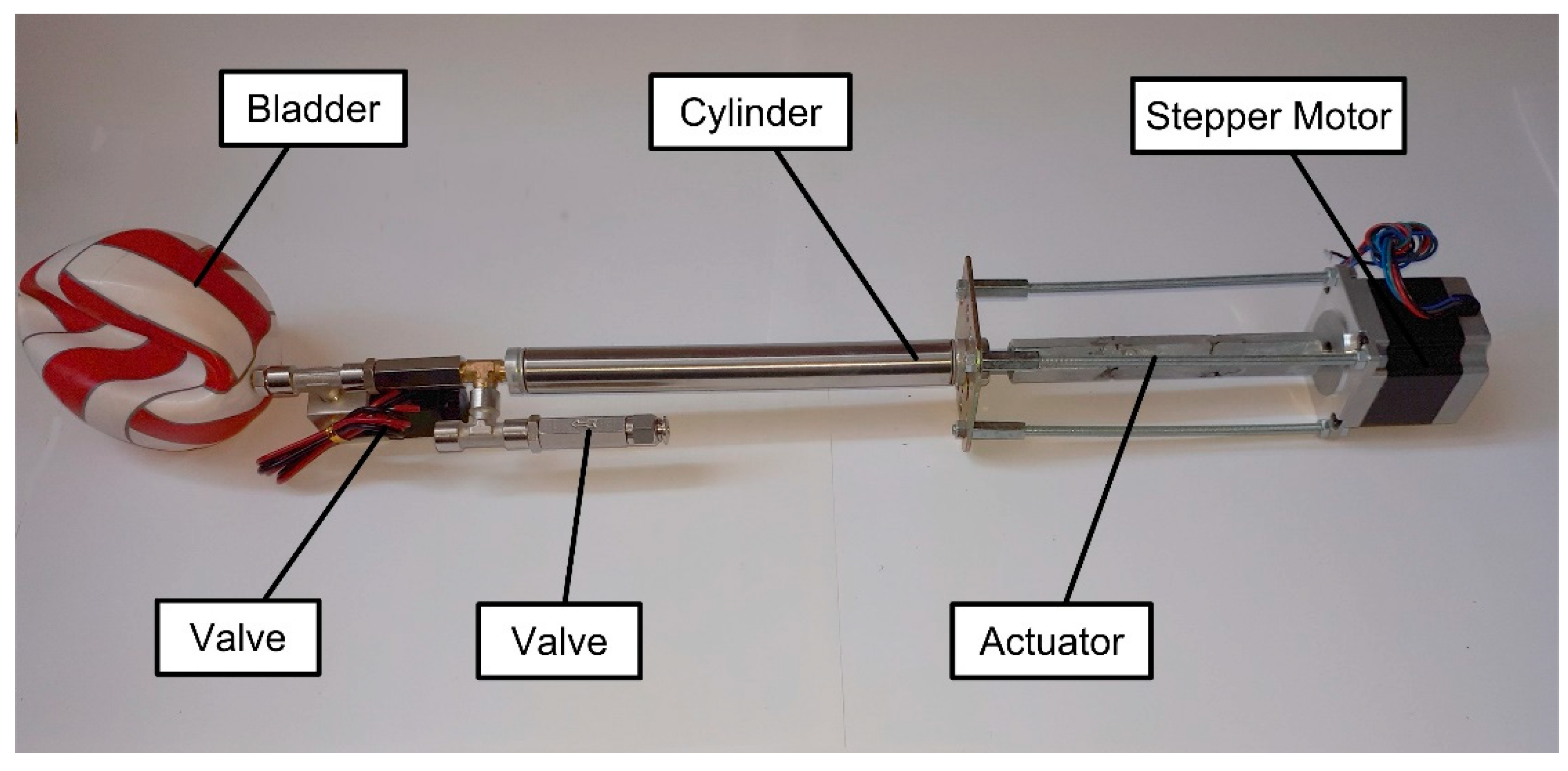
2.1.2. The System Prototype
2.2. Buoyancy
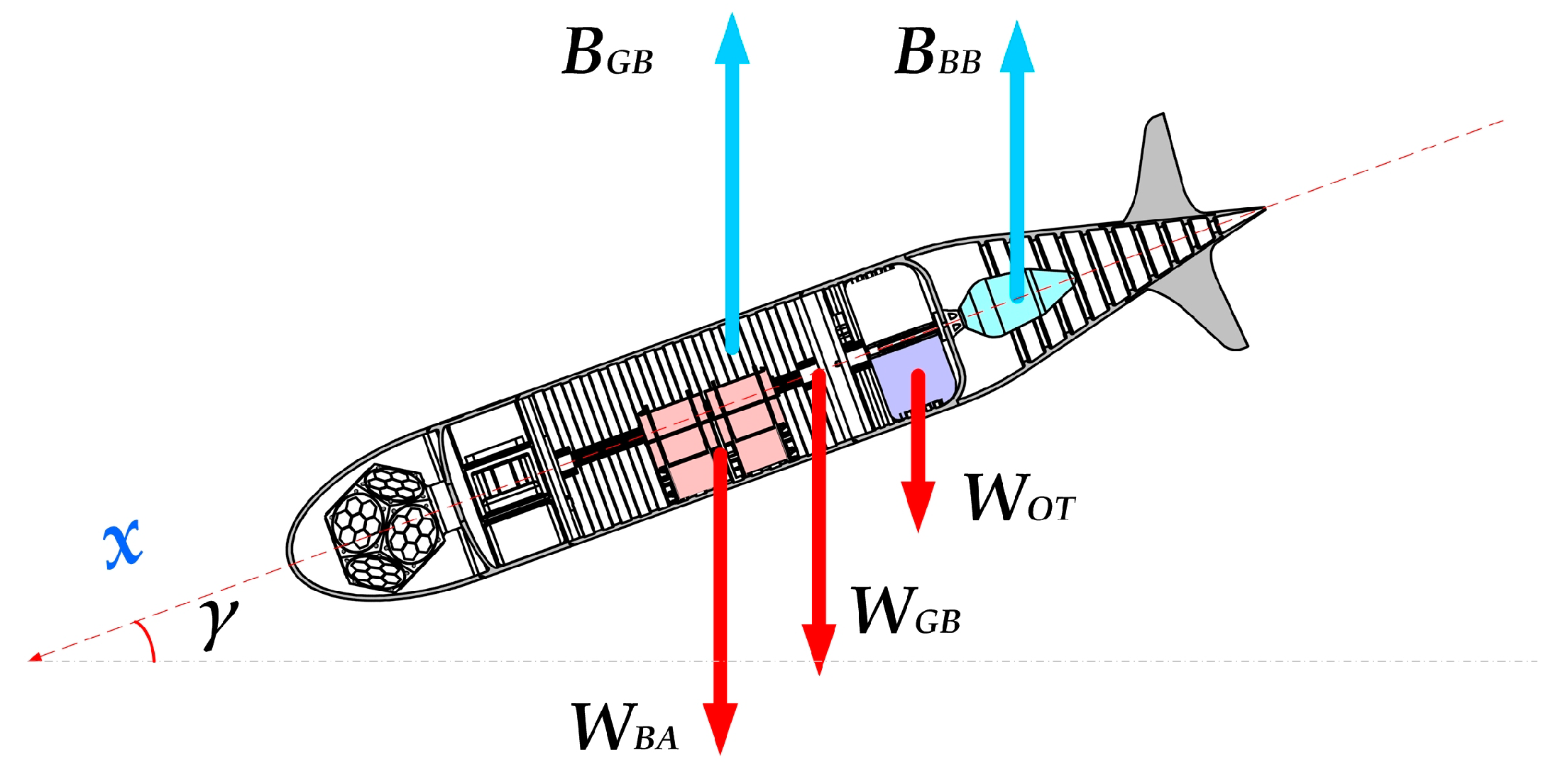
2.2.1. Static Buoyancy
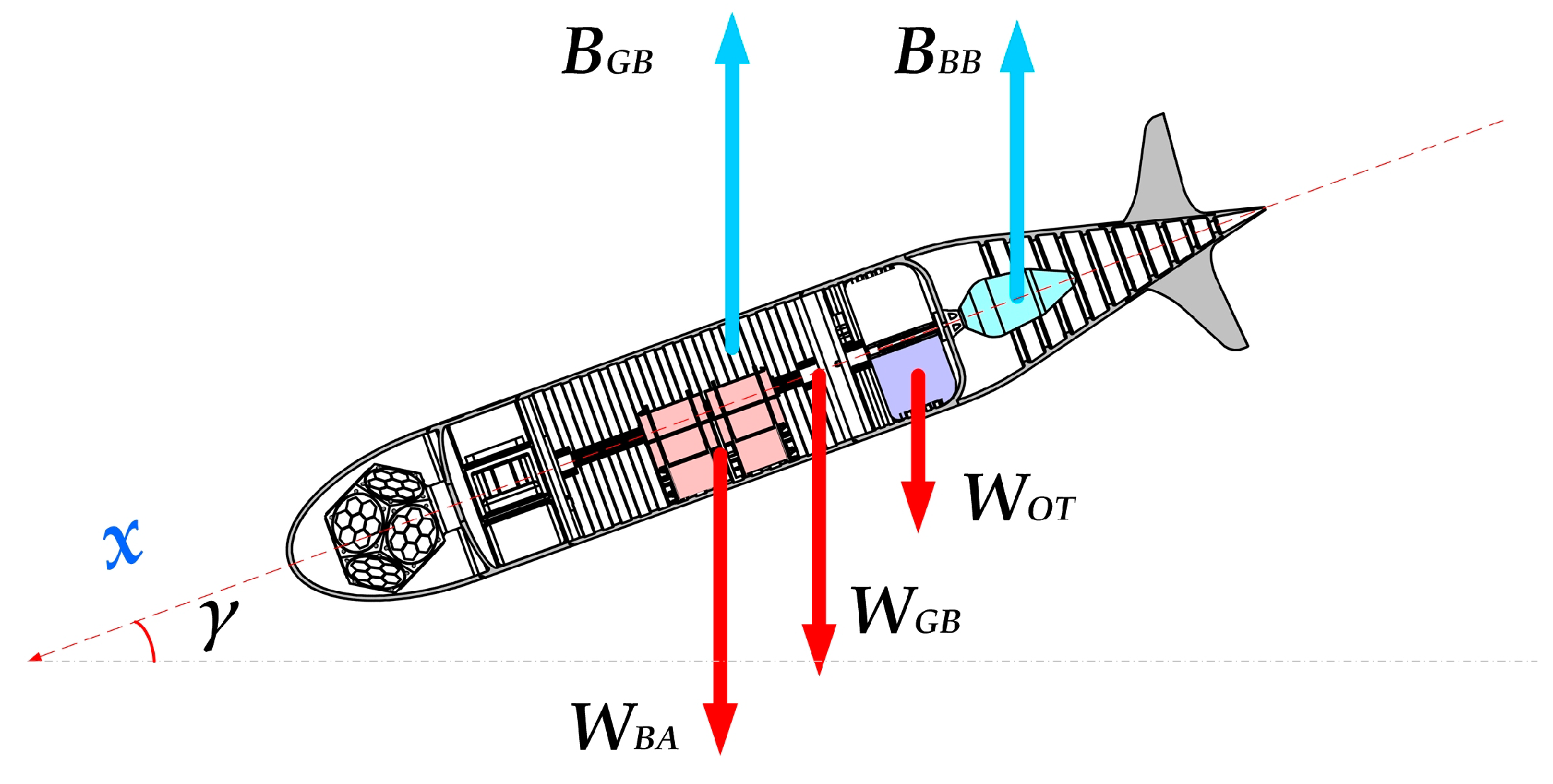
2.2.2. Dynamic Balance on the Vertical Plane
2.2.3. Glider Trajectory
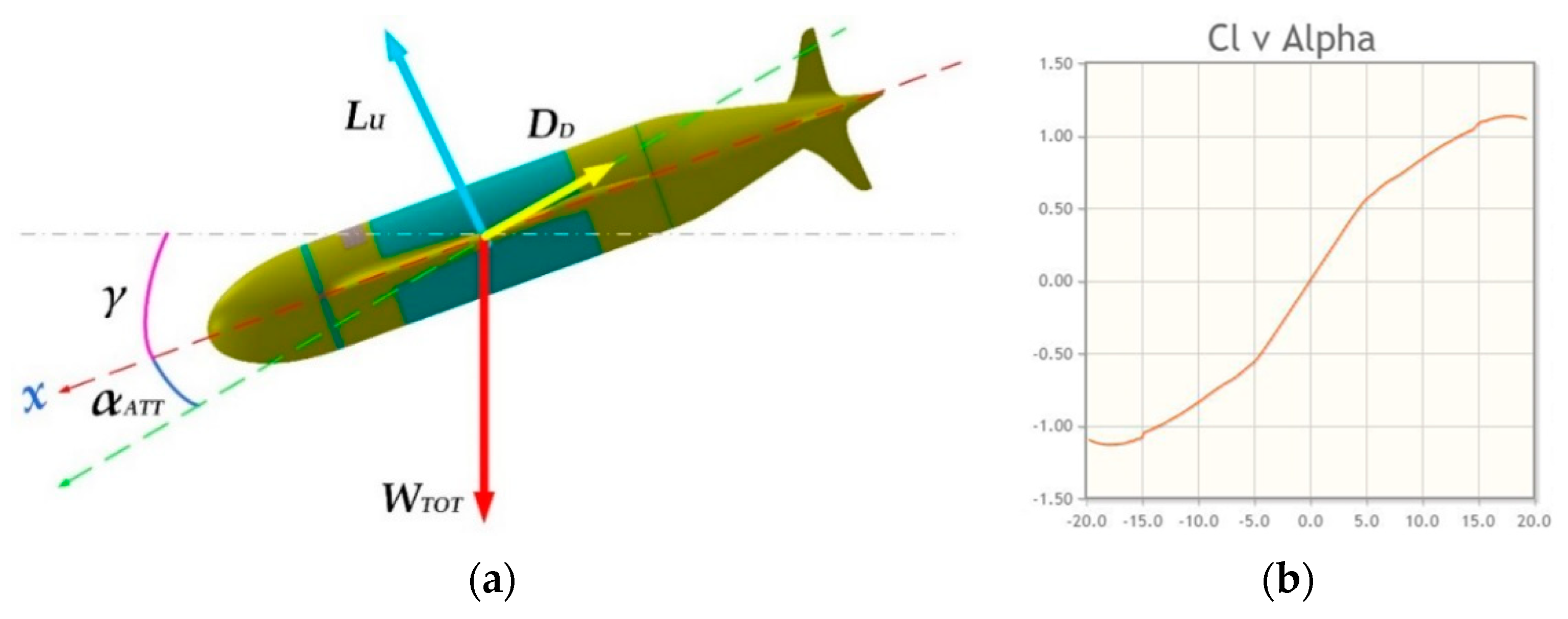
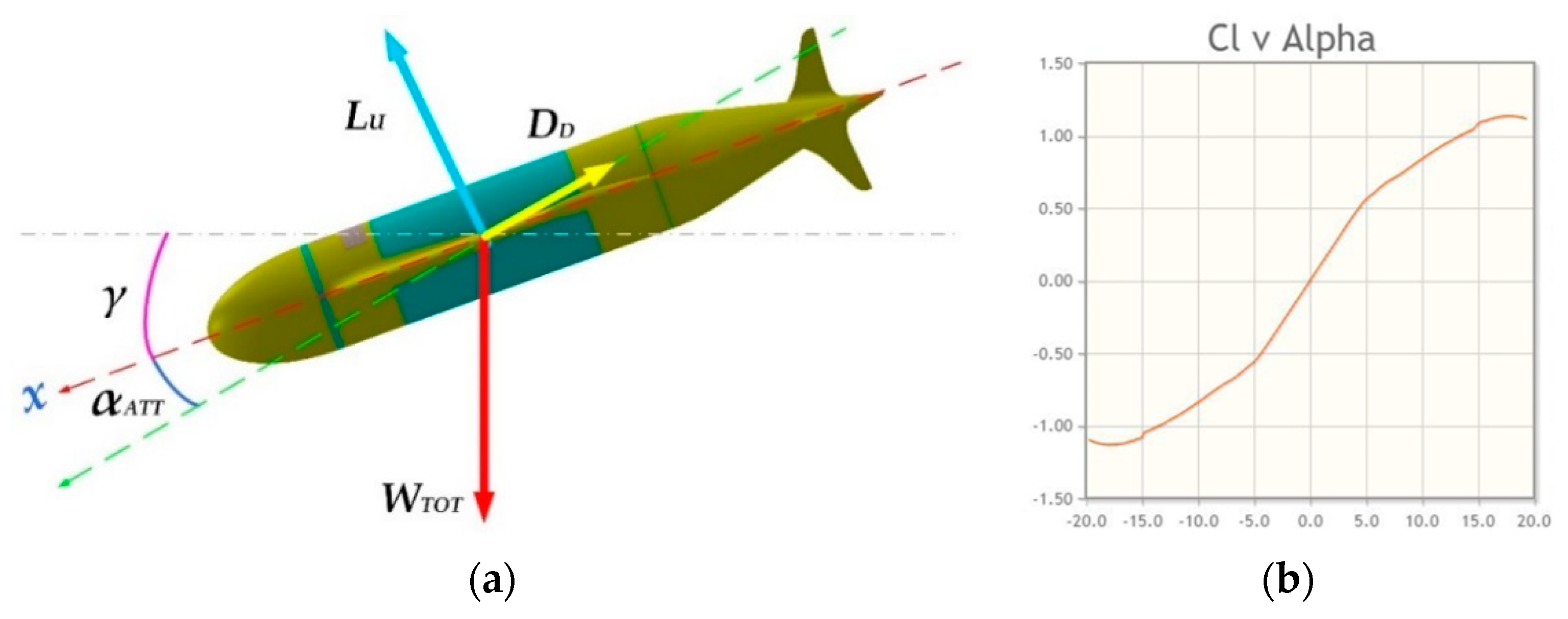
2.2.4. Gliding Forces
2.2.5. Restoring Moment on the Vertical Plan
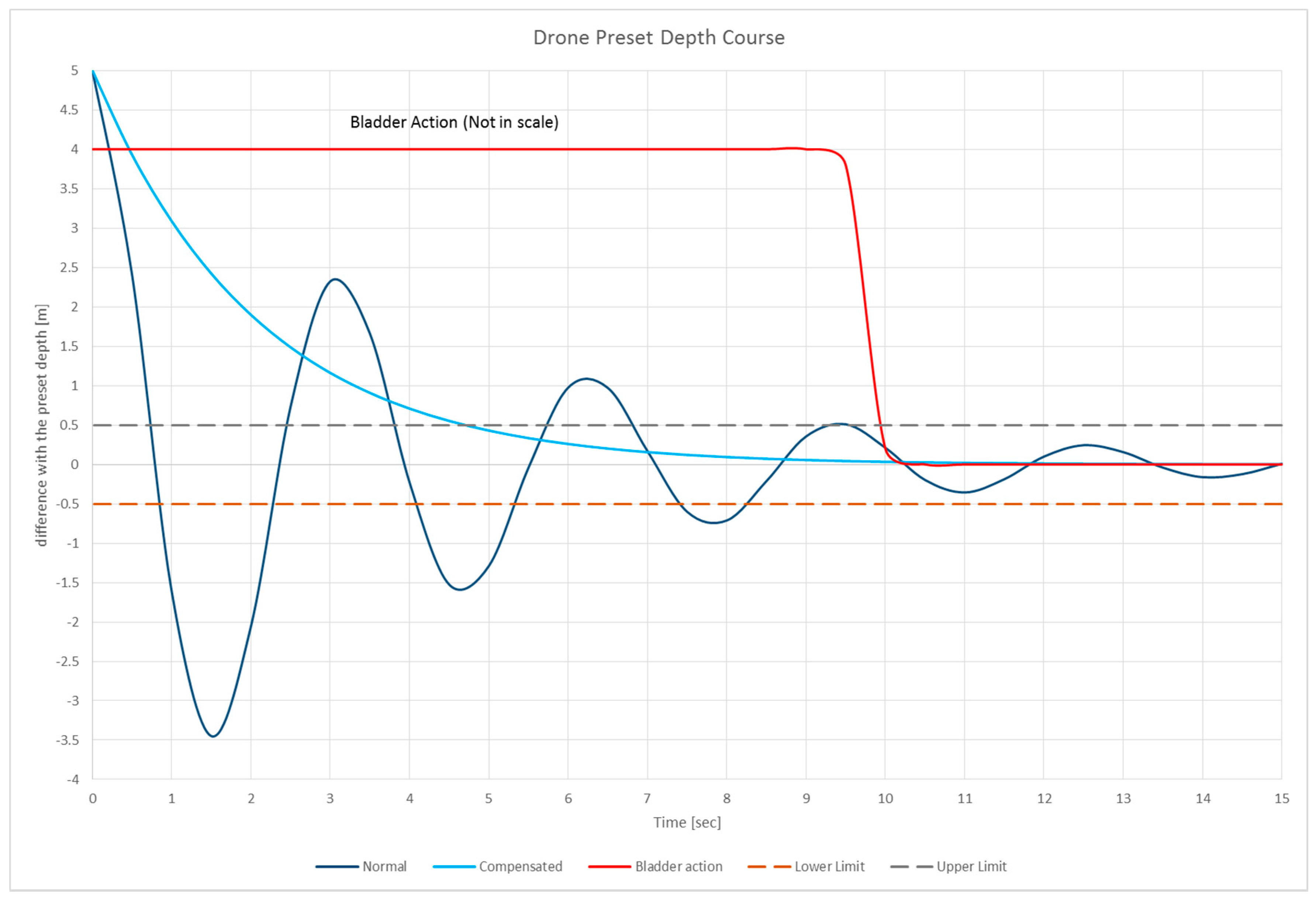
2.2.6. Uncertainty in the Depth Control
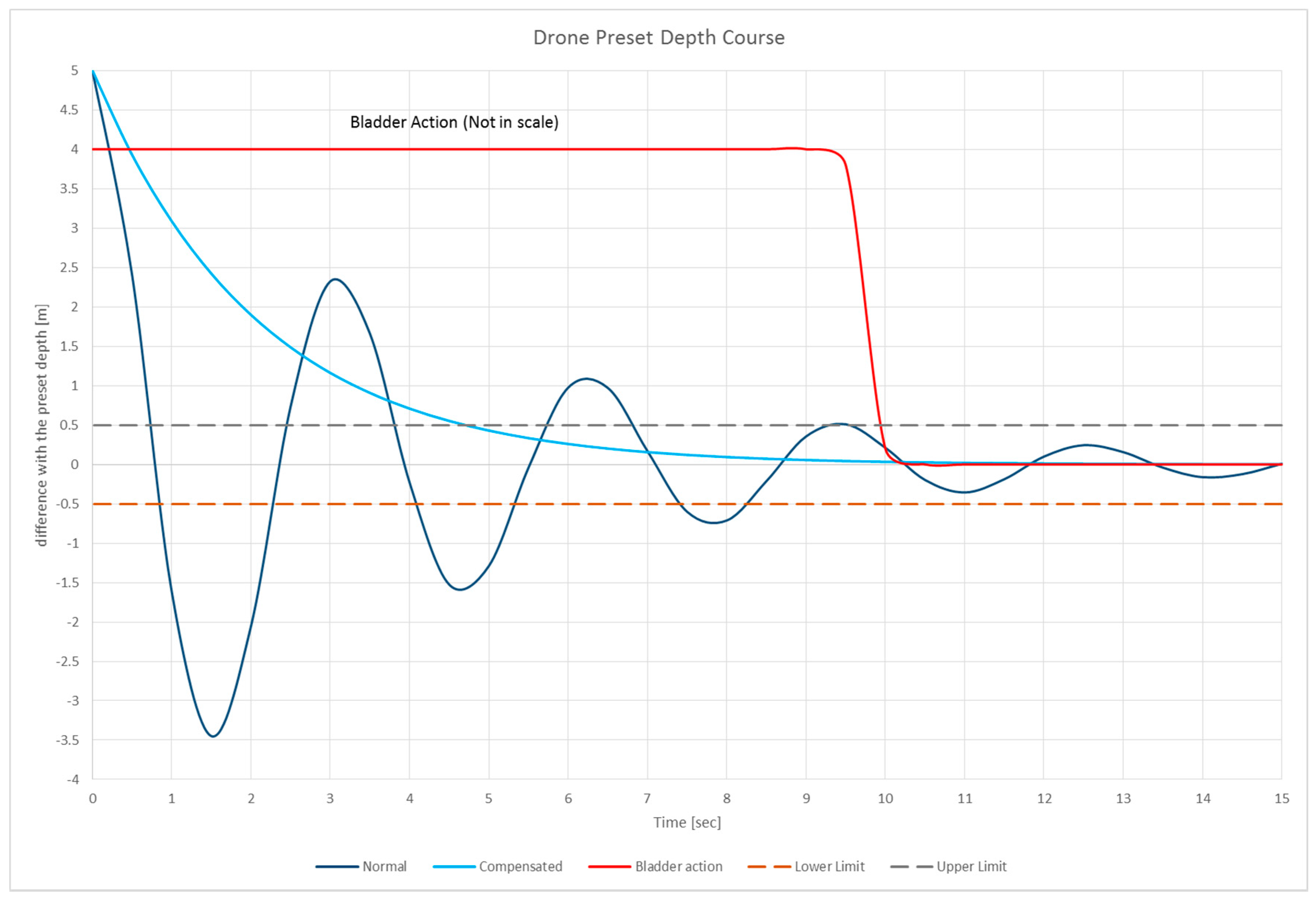
2.2.7. Dynamic Simulation
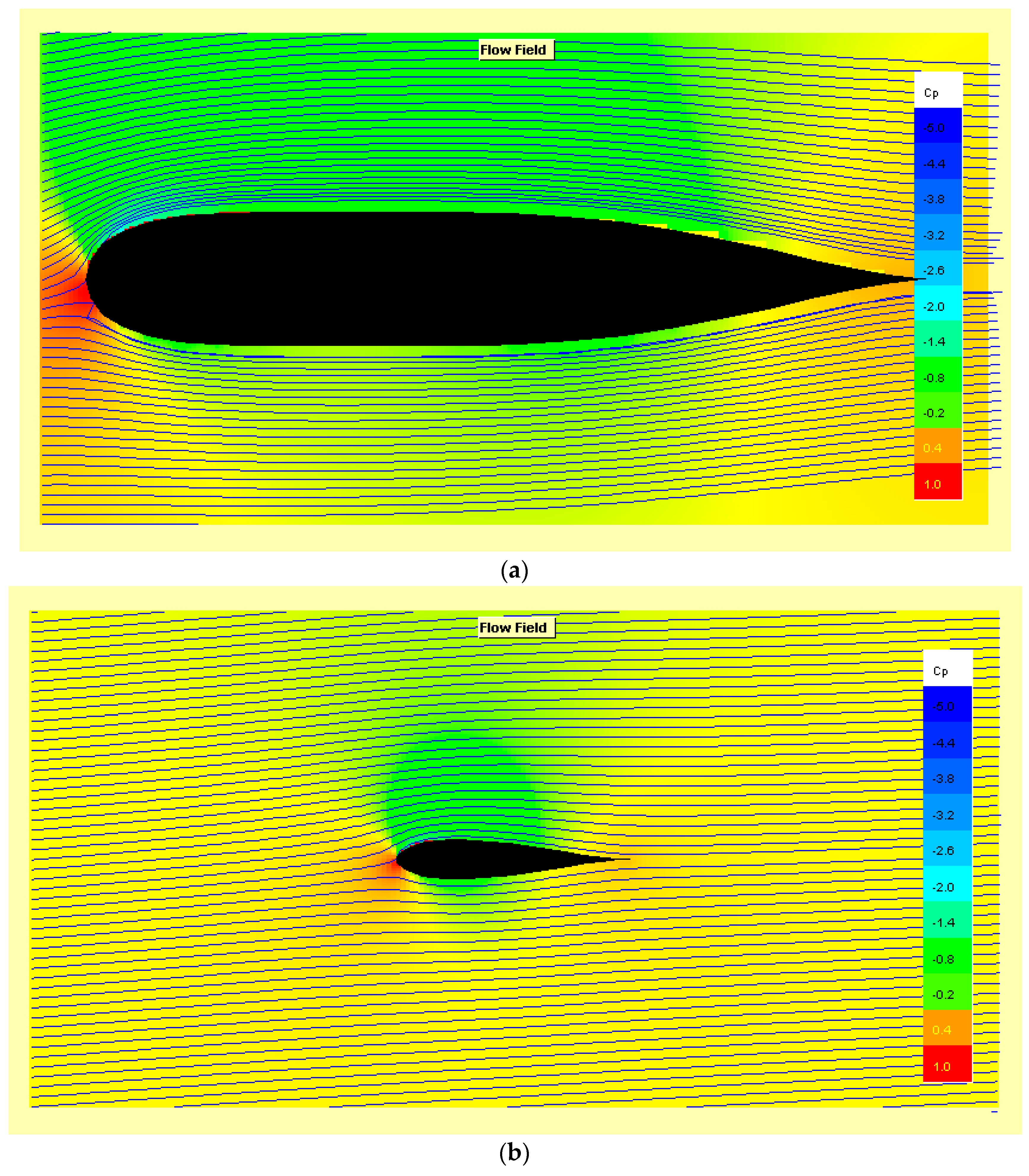
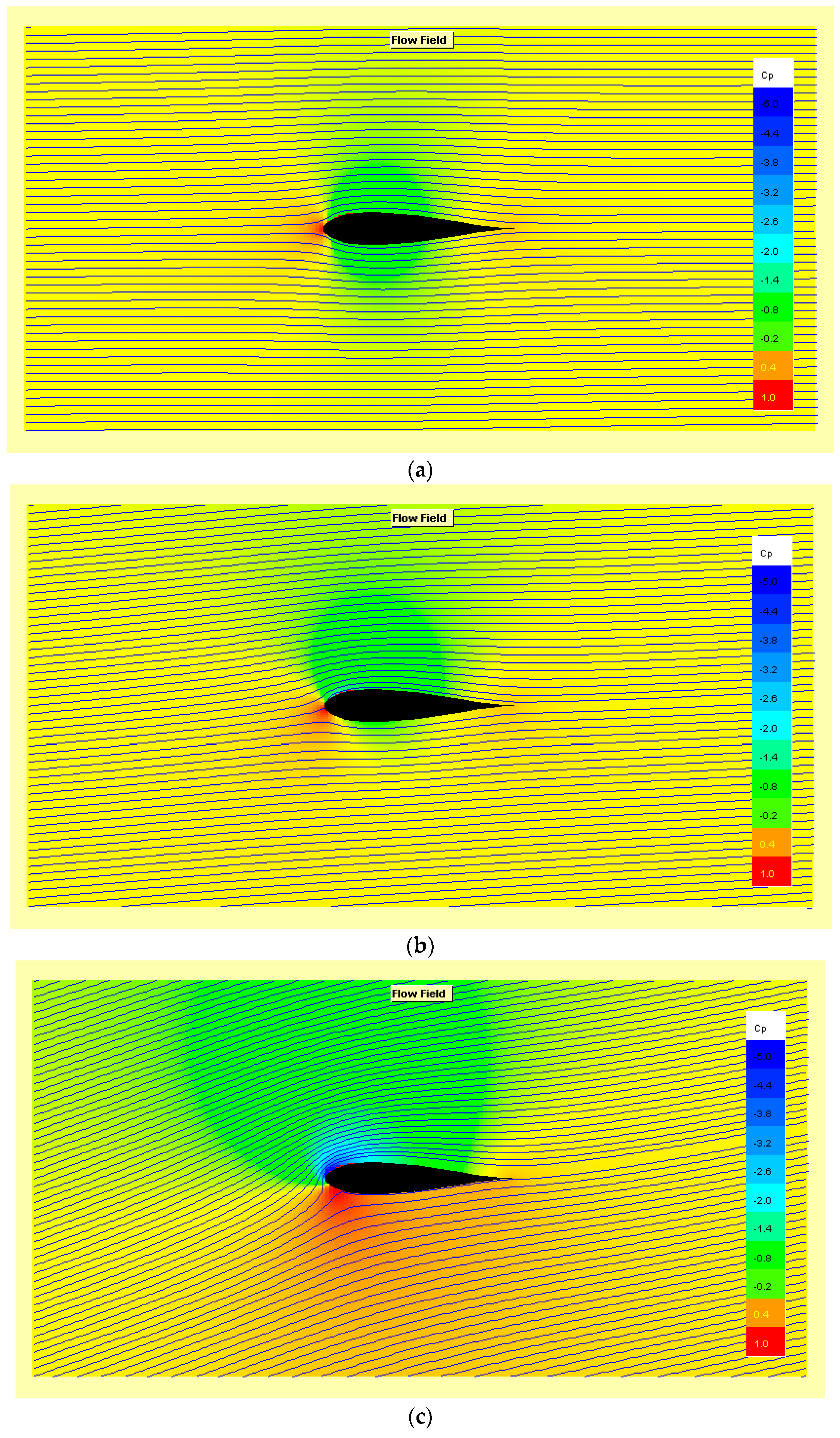
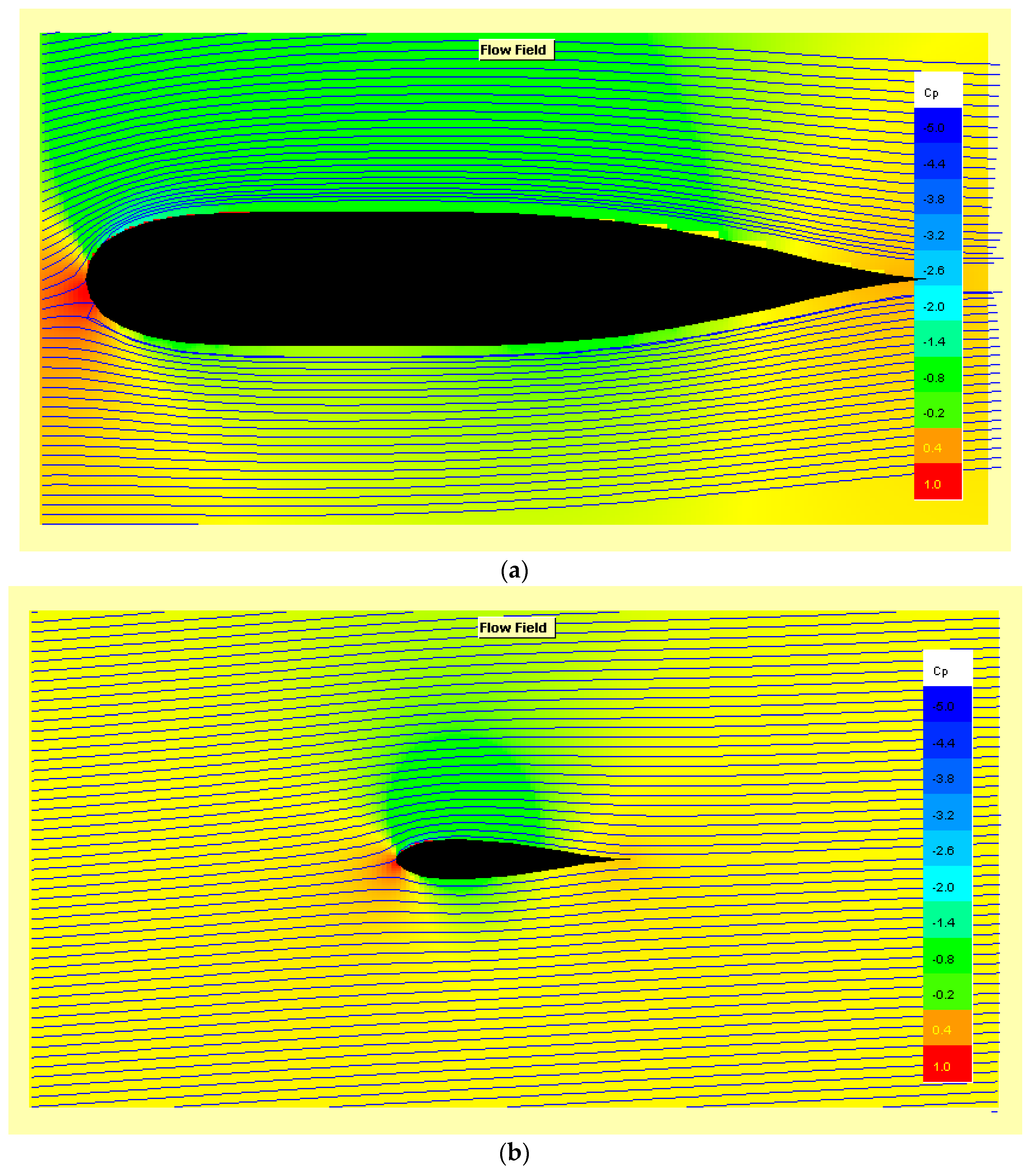
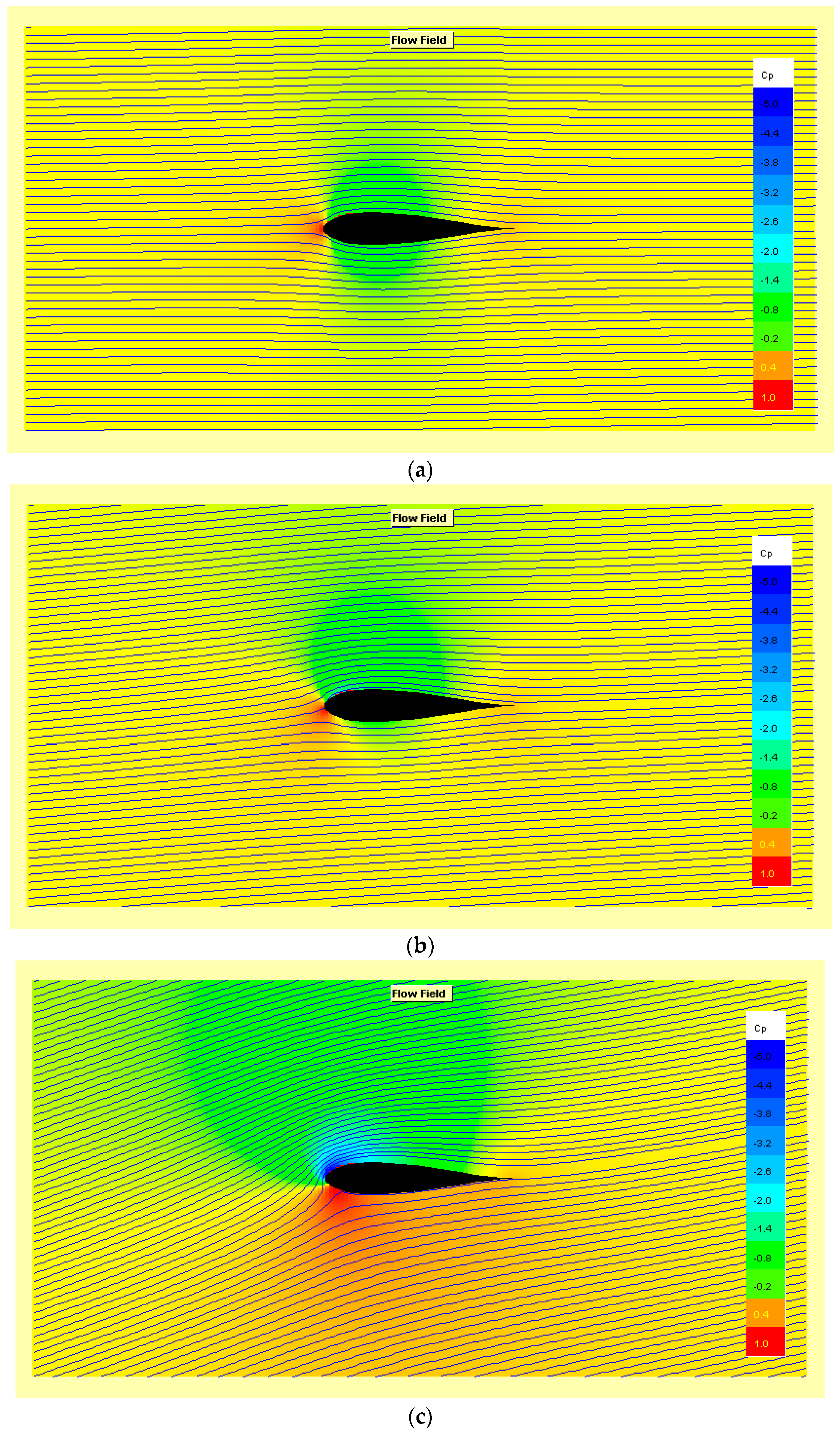
- The evaluation of the potential flow. The analysis is done with a higher order panel method (linear varying vorticity distribution) and it calculates the local, inviscid flow velocity along the surface of the aerofoil for any desired angle of attack.
- The evaluation of the boundary layer. The analysis is steps along the upper and the lower surfaces of the aerofoil, starting at the stagnation point, solves a set of differential equations to find the various boundary layer parameters, according to the integral method.
3. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wood, S. Autonomous underwater gliders. In Underwater Vehicles; Chapter 26; Inzartsev, A.V., Ed.; In-Tech: Vienna, Austria, 2009; pp. 499–524. [Google Scholar]
- Kayton, M.; Fried, W.R. Avionics Navigation Systems; Wiley: New York, NY, USA, 2007; ISBN 9780471547952. [Google Scholar]
- Jenkins, S.A.; Humphreys, D.E.; Sherman, J.; Osse, J.; Jones, C.; Leonard, N.; Graver, J.; Bachmayer, R.; Clem, T.; Carroll, P.; et al. Underwater Glider System Study; Technical Report No. 53; Scripps Institution of Oceanography: San Diego, CA, USA, May 2003. [Google Scholar]
- Graver, J.G. Underwater Gliders: Dynamics, Control and Design. Ph.D. Thesis, Princeton University, Princeton, NJ, USA, 2005. [Google Scholar]
- Kan, L.; Zhang, Y.; Fan, H.; Yang, W.; Chen, Z. MATLAB-Based simulation of buoyancy-driven underwater glider motion. J. Ocean Univ. Chin. 2007, 7, 113–118. [Google Scholar] [CrossRef]
- Woolsey, C.A.; Leonard, N.E. Stabilizing underwater vehicle motion using internal rotors. Automatica 2002, 38, 2053. [Google Scholar] [CrossRef]
- Jekeli, C. Inertial Navigation Systems with Geodetic Applications; Walter de Gruyter Berlin: New York, NY, USA, 2001. [Google Scholar]
- Smith, R.N.; Chao, Y.; Jones, B.H.; Caron, D.A.; Li, P.; Sukhatme, G.S. Trajectory Design for Autonomous Underwater Vehicles based on Ocean Model Predictions for Feature Tracking. In Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 2010; pp. 263–273, 2009. [Google Scholar]
- Mitchell, B.; Wilkening, E.; Mahmoudian, N. Low cost underwater gliders for littoral marine research. In Proceedings of the American Control Conference (ACC), Seattle, WA, USA, 17–19 June 2013; pp. 1412–1417. [Google Scholar]
- Meyer, D. Glider Technology for Ocean Observations: A Review. Ocean Sci. Discuss. 2016, 2016, 1–26. [Google Scholar] [CrossRef]
- Davis, R.E.; Eriksen, C.C.; Jones, C.P. Autonomous buoyancy-driven underwater gliders. In Technology and Applications of Autonomous Underwater Vehicles; Griffiths, G., Ed.; Taylor & Francis: London, UK, 2002; pp. 37–58. [Google Scholar]
- Wang, C.; Zhang, Z.; Gu, J.; Liu, J.; Miao, T. Design and Hydrodynamic Performance Analysis of Underwater Glider Model. In Proceedings of the 2012 International Conference on Computer Distributed Control and Intelligent Environmental Monitoring (CDCIEM), Hunan, China, 5–6 March 2012; pp. 225–227. [Google Scholar] [CrossRef]
- De Francesco, E.; De Francesco, E.; De Francesco, R.; Leccese, F.; Cagnetti, M. A proposal to update LSA databases for an operational availability based on autonomic logistic. In Proceedings of the 2nd IEEE International Workshop on Metrology for Aerospace, MetroAeroSpace, Benevento, Italy, 4–5 June 2015; pp. 38–43. [Google Scholar] [CrossRef]
- Eriksen, C.C.; Osse, T.J.; Light, R.D.; Wen, T.; Lehman, T.W.; Sabin, P.L.; Ballard, J.W.; Chiodi, A.M. Seaglider: A longrange autonomous underwater vehicle for oceanographic research. IEEE J Oceanic Eng. 2001, 26, 424–436. [Google Scholar] [CrossRef]
- Rudnick, D.L.; Eriksen, C.C.; Fratantoni, D.M.; Perry, M.J. Underwater Gliders for Ocean Research. Mar. Technol. Soc. J. 2004, 38, 1. [Google Scholar]
- Austin, R. Unmanned Aircraft Systems; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Graver, J.G.; Liu, J.; Woolsey, C.; Leonard, N.E. Design and Analysis of an Underwater Vehicle for Controlled Gliding. In Proceedings of the Conference on Information Sciences and Systems (CISS), Princeton, NJ, USA, 2–5 July 1998. [Google Scholar]
- Leccese, F.; Cagnetti, M.; Giarnetti, S.; Petritoli, E.; Luisetto, I.; Tuti, S.; Ðurović-Pejčev, R.; Ðorđević, T.; Tomašević, A.; Bursić, V.; et al. A Simple Takagi-Sugeno Fuzzy Modelling Case Study for an Underwater Glider Control System. In Proceedings of the 2018 IEEE International Workshop on Metrology for the Sea; Learning to Measure Sea Health Parameters (MetroSea), Bari, Italy, 8–10 October 2018; pp. 262–267. [Google Scholar] [CrossRef]
- Teledyne Webb Research. Slocum Electric Glider. Available online: http://www.webbresearch.com/ (accessed on 1 February 2019).
- Wood, S. State of Technology in Autonomous Underwater Gliders. Mar. Technol. Soc. J. 2013, 47, 5. [Google Scholar] [CrossRef]
- Waldmann, C.; Kausche, A.; Iversen, M. MOTH-An underwater glider design study carried out as part of the HGF alliance ROBEX. In Proceedings of the 2014 IEEE/OES Autonomous Underwater Vehicles (AUV), Oxford, UK, 25–29 July 2014; pp. 1–3. [Google Scholar] [CrossRef]
- Davis, R.E.; Webb, D.C.; Regier, A.; Dufour, J. The Autonomous Lagrangian Circulation Explorer (ALACE). J. Atmos. Oceanic Technol. 1992, 9, 264–285. [Google Scholar] [CrossRef]
- Seo, D.C.; Gyungnam, J.; Choi, H.S. Pitching control simulation of an underwater glider using CFD analysis. In Proceedings of the Oceans—MTS/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008; pp. 1–5. [Google Scholar]
- Evans, C.D.; Riggins, R. The Design and Analysis of Integrated Navigation Systems Using Real INS and GPS Data. In Proceedings of the IEEE 1995 National Aerospace and Electronics Conference, Dayton, OH, USA, 22–26 May 1995. [Google Scholar]
- Yu, J.; Zhang, F.; Zhang, A.; Jin, W.; Tian, Y. Motion Parameter Optimization and Sensor Scheduling for the Sea-Wing Underwater Glider. IEEE J. Oceanic Eng. 2013, 38, 243–254. [Google Scholar] [CrossRef]
- Hussain, N.A.A.; Arshad, M.R.; Mohd-Mokhtar, R. Modeling and Identification of an Underwater Glider. In Proceedings of the 2010 International Symposium on Robotics and Intelligent Sensors (IRIS2010), Nagoya, Japan, 8–11 March 2010. [Google Scholar]
- Bohenek, B.J. The Enhanced Performance of an Integrate Navigation System. In A Highly Dynamic Environment; Air Force Institute of Technology: Dayton, OH, USA, 1994. [Google Scholar]
- Beard, R.W.; McLain, T.W. Small Unmanned Aircraft—Theory and Practice; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Petritoli, E.; Leccese, F.; Ciani, L. Reliability assessment of UAV systems. In Proceedings of the 4th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padua, Italy, 21–23 June 2017; pp. 266–270. [Google Scholar]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F. Improvement of altitude precision in indoor and urban canyon navigation for small flying vehicles. In Proceedings of the 2nd IEEE International Workshop on Metrology for Aerospace (MetroAeroSpace 2015), Benevento, Italy, 4–5 June 2015; pp. 56–60. [Google Scholar] [CrossRef]
- Andrade-Bustos, I.; Salgado-Jiménez, T.; García-Valdovinos, L.G.; Bandala-Sánchez, M. Stable Sliding PD Control for underwater gliders: Experimental results. In Proceedings of the Oceans 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–7. [Google Scholar]
- Pereira, A.; Heidarsson, H.; Caron, D.A.; Jones, B.H.; Sukhatme, G.S. A communication framework for the cost-effective operation of slocum gliders in coastal regions. In Proceedings of the 7th International Conference on Field and Service Robotics, Cambridge, MA, USA, 14–16 July 2009; pp. 1–10. [Google Scholar]
- Skibski, C.E. Design of an Autonomous Underwater Glider focusing on External Wing Control Surfaces and Sensor Integration. Bachelor’s Thesis, Florida Institute of Technology, Melbourne, FL, USA, 2009. [Google Scholar]
- Isa, K.; Arshad, M.R. An analysis of homeostatic motion control system for a hybrid-driven underwater glider. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Wollongong, Australia, 9–12 July 2013; pp. 1570–1575. [Google Scholar]
- Küchemann, D. The Aerodynamic Design of Aircraft; Pergamon international library of science, technology, engineering, and social studie; Pergamon Press: Oxford, UK, 1978. [Google Scholar]
- Parthasarathy, G.; Sree, D.S.; Manasa, B.L. Design Mathematical Modeling and Analysis of Underwater Glider. Int. J. Sci. Res. 2015, 4, 711–714. [Google Scholar]
- Song, D.L.; Yao, L.L.; Wang, Z.Y.; Han, L. Pitching Angle Control Method of Underwater Glider Based on Motion Compensation. In Proceedings of the 2015 International Conference on Computational Intelligence and Communication Networks (CICN), Jabalpur, India, 12–14 December 2015; pp. 1548–1551. [Google Scholar]
- Smith, R.N.; Schwager, M.; Smith, S.L.; Rus, D.; Sukhatme, G.S. Persistent Ocean Monitoring with Underwater Gliders Towards Accurate Reconstruction of Dynamic Ocean Processes. In Proceedings of the 2011 IEEE International Conference Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 1517–1524. [Google Scholar]
- Techy, L.; Tomokiyo, R.; Quenzer, J.; Beauchamp, T.; Morgansen, K. Full Scale Wind Tunnel Study of the Seaglider Underwater Glider; UWAA Technical Report UWAATR-2010-0002; University of Washington: Seattle, WA, USA, September 2010. [Google Scholar]
- Wilcox, J.S.; Bellingham, J.G.; Zhang, Y.; Baggeroer, A.B. Performance metrics for oceanographic surveys with autonomous underwater vehicles. IEEE J Oceanic Eng. 2001, 26, 711–725. [Google Scholar] [CrossRef]
- Petritoli, E.; Giagnacovo, T.; Leccese, F. Lightweight GNSS/IRS integrated navigation system for UAV vehicles. In Proceedings of the 2014 IEEE International Workshop on Metrology for Aerospace (MetroAeroSpace), Benevento Italy, 29–30 June 2014; pp. 56–61. [Google Scholar] [CrossRef]
- Webb, D.C.; Simonetti, P.J.; Jones, C.P. SLOCUM: An underwater glider propelled by environmental energy. IEEE J Oceanic Eng. 2001, 26, 447–452. [Google Scholar] [CrossRef]
- Stommel, H. The Slocum Mission. Oceanography 1989, 2, 22–25. [Google Scholar] [CrossRef]
- Sherman, J.; Davis, R.E.; Owens, W.B.; Valdes, J. The autonomous underwater glider “Spray”. IEEE J Oceanic Eng. 2001, 26, 437–446. [Google Scholar] [CrossRef]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology, 2nd ed.; The Institution of Electrical Engineers and The American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2004. [Google Scholar]
- Jun, B.H.; Park, J.Y.; Lee, F.Y.; Lee, P.M.; Lee, C.M.; Kim, K.; Lim, Y.K.; Oh, J.H. Development of the AUV ‘ISiMI’ and free running test in an ocean engineering basin. Ocean Eng. 2009, 36, 1. [Google Scholar] [CrossRef]
- Leonard, N.E.; Graver, J.G. Model-Based feedback control of autonomous underwater gliders. IEEE J. Ocean Eng. 2001, 26, 4. [Google Scholar] [CrossRef]
- Arima, M.; Ichihashi, N.; Ikebuchi, T. Motion characteristics of an underwater glider with independently controllable main wings. In Proceedings of the OCEANS 2008—MTS/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008; pp. 1–7. [Google Scholar]
- Roger, E.O.; Genderson, J.G.; Smith, W.S.; Denny, G.; Farley, P.J. Underwater acoustic glider. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; pp. 2241–2244. [Google Scholar]
- Woithe, H.C.; Kremer, U. A programming architecture for smart autonomous underwater vehicles. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems 2009—IROS 2009, St. Louis, MI, USA, 11–15 October 2009; pp. 4433–4438. [Google Scholar]
- Woithe, H.C.; Tilkidjieva, D.; Kremer, U. Towards a Resource-Aware Programming Architecture for Smart Autonomous Underwater Vehicles; Technical Report, DCS-TR-637; Rutgers University: New Brunswick, NJ, USA, 2008. [Google Scholar]
- Lennart, L. System Identification Theory for the User, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Petritoli, E.; Leccese, F. High accuracy attitude and navigation system for an autonomous underwater vehicle (AUV). Acta IMEKO 2018, 7, 3–9. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F. A high accuracy navigation system for a tailless underwater glider. In Proceedings of the IMEKO TC19 Workshop on Metrology for the Sea, MetroSea 2017: Learning to Measure Sea Health Parameters, Naples, Italy, 11–13 October 2017; pp. 127–132. [Google Scholar]
- Petritoli, E.; Leccese, F. A high accuracy attitude system for a tailless underwater glider. In Proceedings of the IMEKO TC19 Workshop on Metrology for the Sea, MetroSea 2017: Learning to Measure Sea Health Parameters, Naples, Italy, 11–13 October 2017; pp. 7–12. [Google Scholar]
- DSIAC. Reliability of UAVs and Drones. Available online: https://www.dsiac.org/resources/journals/dsiac/spring-2017-volume-4-number-2/reliability-uavs-and-drones (accessed on 28 February 2019).
- Etkin, B. Dynamic of Flight; John Wiley and Sons: Hoboken, NJ, USA, 1959. [Google Scholar]
- Tan, X.; Kim, D.; Usher, N.; Laboy, D.; Jackson, J.; Kapetanovic, A.; Rapai, J.; Sabadus, B.; Zhou, X. An Autonomous Robotic Fish for Mobile Sensing. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 5424–5429. [Google Scholar]
- Smith, R.N.; Pereira, A.; Chao, Y.; Li, P.P.; Caron, D.A.; Jones, B.H.; Sukhatme, G.S. Autonomous Underwater Vehicle trajectory design coupled with predictive ocean models: A case study. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 4–8 May 2010; pp. 4770–4777. [Google Scholar]
- Petritoli, E.; Leccese, F.; Cagnetti, M. A High Accuracy Buoyancy System Control for an Underwater Glider. In Proceedings of the 2018 IEEE International Workshop on Metrology for the Sea; Learning to Measure Sea Health Parameters (MetroSea), Bari, Italy, 8–10 October 2018; pp. 257–261. [Google Scholar] [CrossRef]
- Techy, L.; Kristi Morganseny, A.; Woolseyz, C.A. Long-baseline acoustic localization of the Seaglider underwater glider. In Proceedings of the American Control Conference (ACC) 2011, San Francisco, CA, USA, 29 June–1 July 2011; pp. 3990–3995. [Google Scholar]
- Hussain, N.A.A.; Ali, S.S.A.; Saad, M.N.M.; Nordin, N. Underactuated nonlinear adaptive control approach using U-model for multivariable underwater glider control parameters. In Proceedings of the 2016 IEEE International Conference on Underwater System Technology: Theory and Applications (USYS), Penang, Malaysia, 13–14 December 2016; pp. 19–25. [Google Scholar] [CrossRef]
- Yu, P.; Zhao, Y.; Wang, T.; Zhou, H.; Su, S.; Zhen, C. Steady-state spiral motion simulation and turning speed analysis of an underwater glider. In Proceedings of the 2017 4th International Conference on Information Cybernetics and Computational Social Systems (ICCSS), Dalian, China, 24–26 July 2017; pp. 372–377. [Google Scholar]
- Bloch, T.; Krishnaprasad, P.S.; Leonard, N.; Murray, R. Jerrold Eldon Marsden [Obituaries]. Control Syst. IEEE 2011, 31, 105–108. [Google Scholar]
- Williams, C.D. AUV systems research at the NRC-IOT: An update. In Proceedings of the Underwater Technology 2004—UT ’04. 2004 International Symposium on, Taipei, Taiwan, 20–23 April 2004; pp. 59–73. [Google Scholar]
- Jing, D.; Haifeng, W. System health management for unmanned aerial vehicle: conception, state-of-art, framework and challenge. In Proceedings of the Electronic Measurement & Instruments (ICEMI). In Proceedings of the 2013 IEEE 11th International Conference, Harbin, China, 16–19 August 2013; Volume 2, pp. 859–863. [Google Scholar]
- Javafoil—Analysys of Airfolis. Available online: https://www.mh-aerotools.de/airfoils/javafoil.htm (accessed on 15 February 2019).
- Vogeltanz, T. A Survey of Free Software for the Design, Analysis, Modelling, and Simulation of an Unmanned Aerial Vehicle. Arch. Comput. Meth. Eng. 2016, 23, 449. [Google Scholar] [CrossRef]
- Vogeltanz, T.; Jašek, R. Free software for the modelling and simulation of a mini-UAV. In Proceedings of the Mathematics and Computers in Science and Industry, Varna, Bulgaria, 13–15 September 2014; pp. 210–215. [Google Scholar]
- Jodeh, N.; Blue, P.; Waldron, A. Development of small unmanned aerial vehicle research platform: Modeling and simulating with flight test validation. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; p. 6261. [Google Scholar]
- Mueller, T.J.; DeLaurier, J.D. Aerodynamics of small vehicles. Annual review of fluid mechanics 2003, 35, 89–111. [Google Scholar] [CrossRef]
- Fabiani, P.; Fuertes, V.; Piquereau, A.; Mampey, R.; Teichteil-Königsbuch, F. Autonomous flight and navigation of VTOL UAVs: From autonomy demonstrations to out-of-sight flights. Aerosp. Sci. Technol. 2007, 11, 183–193. [Google Scholar] [CrossRef]
- Wu, N.; Wu, C.; Ge, T.; Yang, D.; Yang, R. Pitch Channel Control of a REMUS AUV with Input Saturation and Coupling Disturbances. Appl. Sci. 2018, 8, 253. [Google Scholar] [CrossRef]
- Hahn, A. Vehicle sketch pad: A parametric geometry modeller for conceptual aircraft design. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010; p. 657. [Google Scholar] [CrossRef]
- Wang, T.; Wu, C.; Wang, J.; Ge, T. Modeling and Control of Negative-Buoyancy Tri-Tilt-Rotor Autonomous Underwater Vehicles Based on Immersion and Invariance Methodology. Appl. Sci. 2018, 8, 1150. [Google Scholar] [CrossRef]
- Boussalis, H.; Valavanis, K.; Guillaume, D.; Pena, F.; Diaz, E.U.; & Alvarenga, J. Control of a simulated wing structure with multiple segmented control surfaces. In Proceedings of the 2013 21st Mediterranean Conference IEEE Control & Automation (MED), Crete, Greece, 25–28 June 2013; pp. 501–506. [Google Scholar]
- Wang, T.; Wang, J.; Wu, C.; Zhao, M.; Ge, T. Disturbance-Rejection Control for the Hover and Transition Modes of a Negative-Buoyancy Quad Tilt-Rotor Autonomous Underwater Vehicle. Appl. Sci. 2018, 8, 2459. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 0.0794 | 0.15779 | 4.972 |
| 0.3997 | 0.4085 | 0.01746 | 0.01676 | 0.00018 | 0.001515 | 0.005 | 0.4752 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Petritoli, E.; Leccese, F.; Cagnetti, M. High Accuracy Buoyancy for Underwater Gliders: The Uncertainty in the Depth Control. Sensors 2019, 19, 1831. https://doi.org/10.3390/s19081831
Petritoli E, Leccese F, Cagnetti M. High Accuracy Buoyancy for Underwater Gliders: The Uncertainty in the Depth Control. Sensors. 2019; 19(8):1831. https://doi.org/10.3390/s19081831
Chicago/Turabian StylePetritoli, Enrico, Fabio Leccese, and Marco Cagnetti. 2019. "High Accuracy Buoyancy for Underwater Gliders: The Uncertainty in the Depth Control" Sensors 19, no. 8: 1831. https://doi.org/10.3390/s19081831
APA StylePetritoli, E., Leccese, F., & Cagnetti, M. (2019). High Accuracy Buoyancy for Underwater Gliders: The Uncertainty in the Depth Control. Sensors, 19(8), 1831. https://doi.org/10.3390/s19081831