Highly Sensitive and Durable Structured Fibre Sensors for Low-Pressure Measurement in Smart Skin


Abstract
1. Introduction
2. Materials and Methods
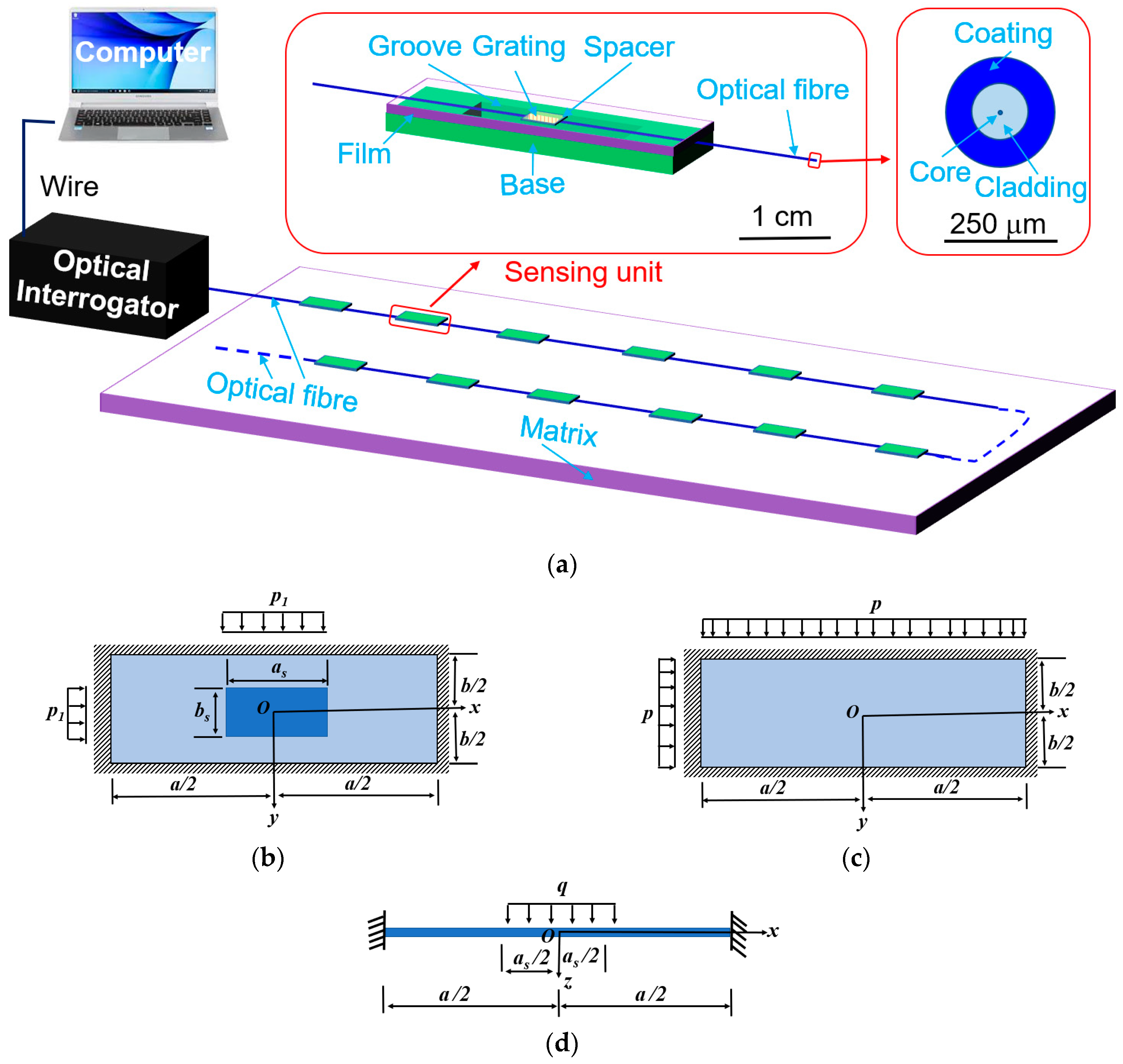
2.1. Structural Design
2.2. Materials and Fabrications
2.3. Theoretical Analysis
2.3.1. Construction of Theoretical Models
2.3.2. Effects of Parameters in Simulation
Simulate Effect

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Symbol | Value |
|---|---|---|---|
| Length of the groove, a | 20 mm | Elastic modulus of the core of optical fibre, Ec1 | 70 GPa |
| Width of the thin groove, b | 5 mm | Poison’s ratio of the core of optical fibre, μc1 | 0.17 |
| Elastic modulus of the thin film, E | 1.5 MPa | Diameter of the cladding layer of optical fibre, dc2 | 125 μm |
| Poison’s ratio of the thin film, μ | 0.45 | Elastic modulus of the cladding layer of optical fibre, Ec2 | 70 GPa |
| Thickness of the thin film, h | 1 mm | Poison’s ratio of the cladding layer of optical fibre, μc2 | 0.17 |
| Length of the spacer, as | 4 mm | Diameter of the coating layer of optical fibre, dc3 | 242 μm |
| Width of the spacer, bs | 3 mm | Elastic modulus of the coating layer of optical fibre, Ec3 | 2.5 GPa |
| Thickness of the spacer, hs | 0.3 mm | Poison’s ratio of the coating layer of optical fibre, μc3 | 0.34 |
| Diameter of the core of optical fibre, dc1 | 8.2 μm | Coefficient of strain, CS | 0.78 [33] |
3. Results and Discussions
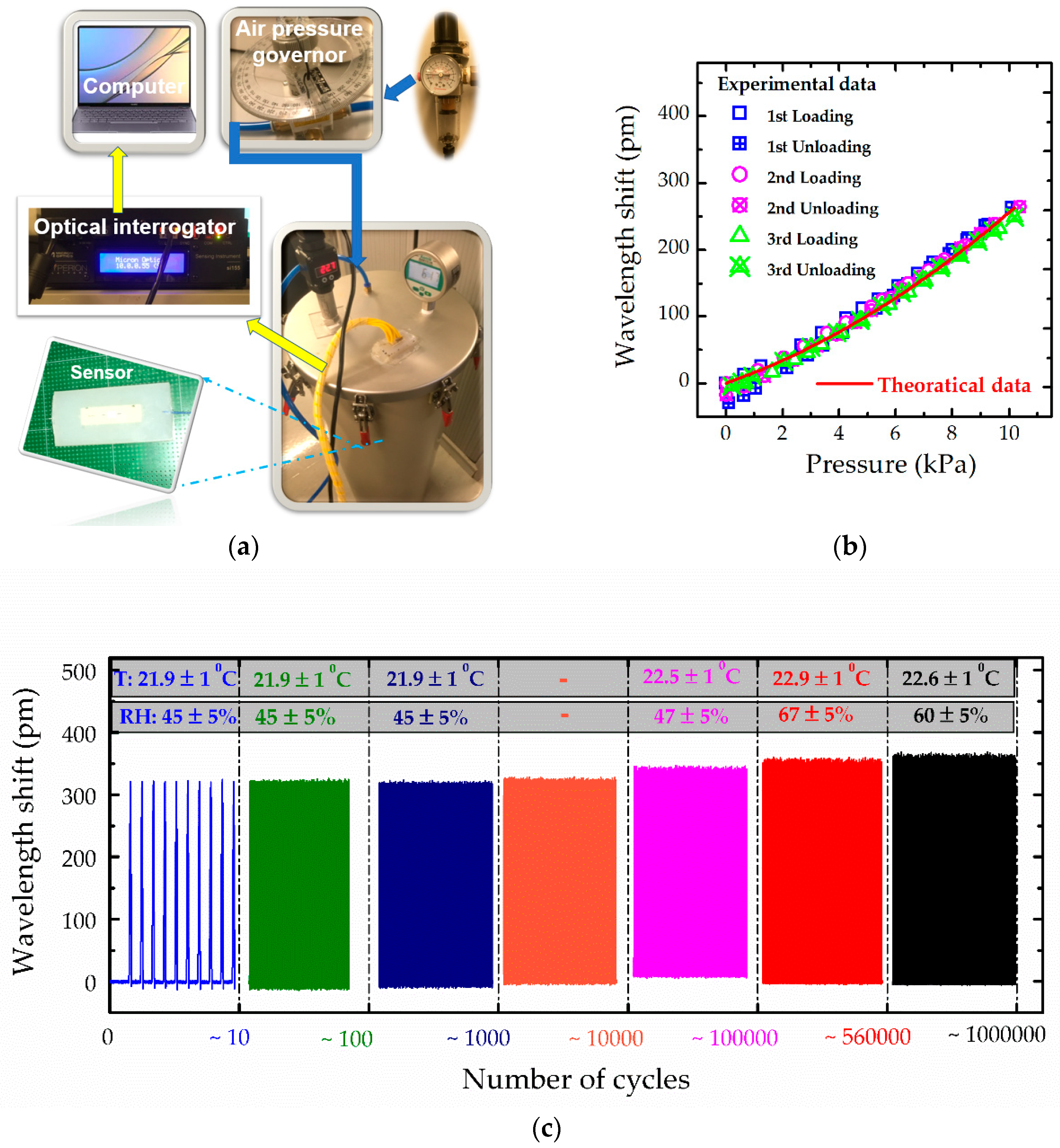
3.1. Calibration of Optical Sensors
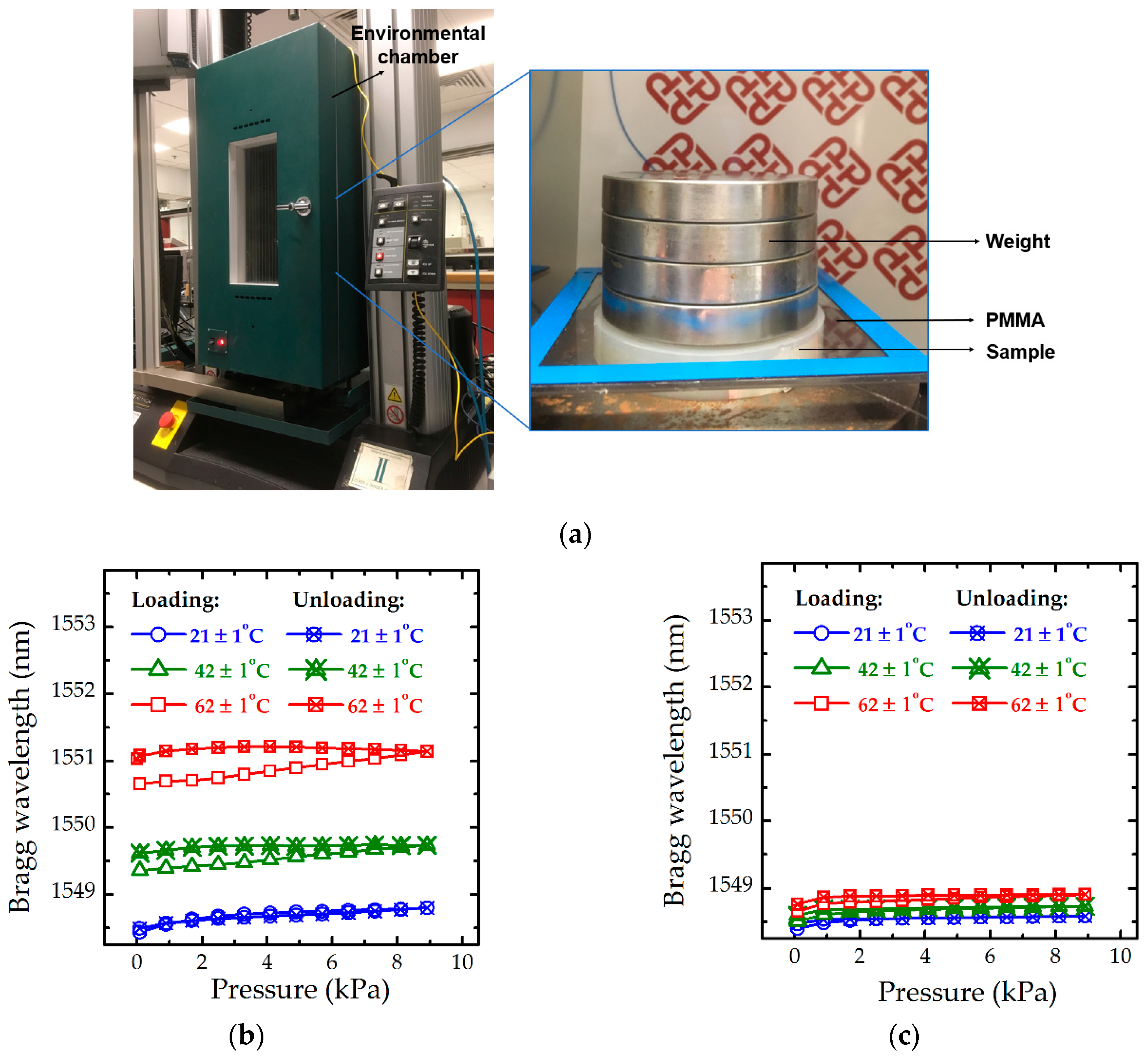
3.2. Temperature Effect
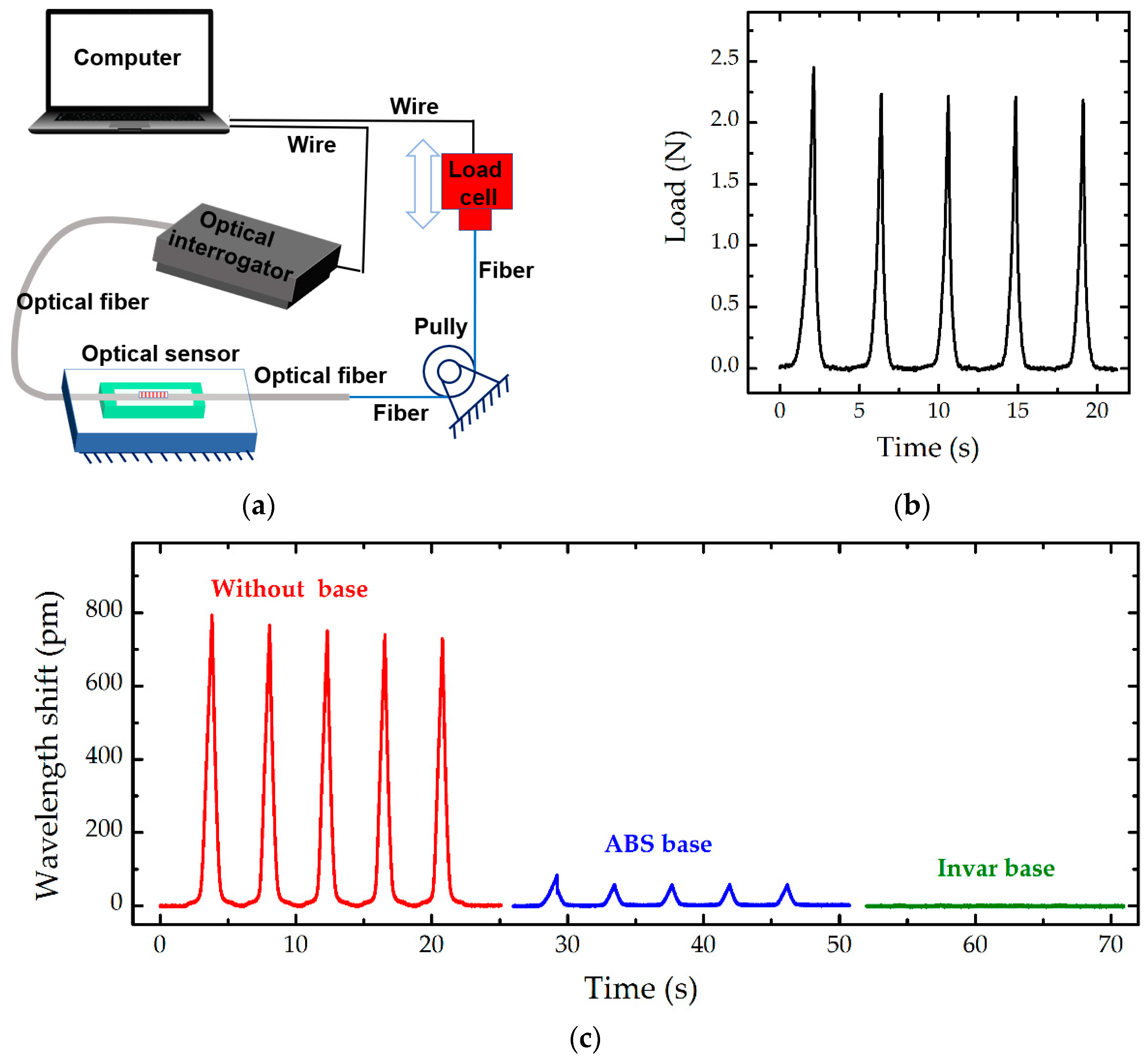
3.3. Inflence of Tension on Fibre
4. Applications of Optical Pressure Sensors
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- De Oliveira, M.A.; Monteiro, A.V.; Vieira, J. A New Structural Health Monitoring Strategy Based on PZT Sensors and Convolutional Neural Network. Sensors 2018, 18, 2955. [Google Scholar] [CrossRef] [PubMed]
- Domingues, M.F.; Alberto, N.; Leitão, C.; Tavares, C.; de Lima, E.R.; Radwan, A.; Sucasas, V.; Rodriguez, J.; André, P.; Antunes, P. Insole optical fiber sensor architecturefor remote gait analysis—An eHealth Solution. IEEE Internet Things J. 2017, 6, 207–214. [Google Scholar] [CrossRef]
- Luo, N.Q.; Dai, W.X.; Li, C.L.; Zhou, Z.Q.; Lu, L.Y.; Poon, C.C.Y.; Chen, S.C.; Zhang, Y.T.; Zhao, N. Flexible Piezoresistive Sensor Patch Enabling Ultralow Power Cuffless Blood Pressure Measurement. Adv. Funct. Mater. 2016, 26, 1178–1187. [Google Scholar] [CrossRef]
- Voinea, G.D.; Butnariu, S.; Mogan, G. Measurement and Geometric Modelling of Human Spine Posture for Medical Rehabilitation Purposes Using a Wearable Monitoring System Based on Inertial Sensors. Sensors 2017, 17, 3. [Google Scholar] [CrossRef] [PubMed]
- Domingues, M.F.; Tavares, C.; Leitao, C.; Frizera-Neto, A.; Alberto, N.; Marques, C.; Radwan, A.; Rodriguez, J.; Postolache, O.; Rocon, E.; et al. Insole optical fiber Bragg grating sensors network for dynamic vertical force monitoring. J. Biomed. Opt. 2017, 22, 91507. [Google Scholar] [CrossRef]
- Na, W.S.; Baek, J. A Review of the Piezoelectric Electromechanical Impedance Based Structural Health Monitoring Technique for Engineering Structures. Sensors 2018, 18, 1307. [Google Scholar] [CrossRef] [PubMed]
- Zang, Y.; Zhang, F.; Di, C.-A.; Zhu, D. Advances of flexible pressure sensors toward artificial intelligence and health care applications. Mater. Horiz. 2015, 2, 140–156. [Google Scholar] [CrossRef]
- Shu, L.; Hua, T.; Wang, Y.; Li, Q.; Feng, D.D.; Tao, X. In-shoe plantar pressure measurement and analysis system based on fabric pressure sensing array. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 767–775. [Google Scholar]
- Tanaka, S.; Midorikawa, T.; Tokura, H. Effects of pressure exerted on the skin by elastic cord on the core temperature, body weight loss and salivary secretion rate at 35 C. Eur. J. Appl. Physiol. 2006, 96, 471–476. [Google Scholar] [CrossRef] [PubMed]
- Denton, M. Fit, stretch, and comfort. Textiles 1972, 3, 12–17. [Google Scholar]
- Xiong, Y.; Tao, X.M. Compression Garments for Medical Therapy and Sports. Polymers 2018, 10, 663. [Google Scholar] [CrossRef]
- Rajala, S.; Lekkala, J. Plantar shear stress measurements—A review. Clin. Biomech. 2014, 29, 475–483. [Google Scholar] [CrossRef]
- Sundara-Rajan, K.; Bestick, A.; Rowe, G.I.; Klute, G.K.; Ledoux, W.R.; Mamishev, A.V. Capacitive Sensing of Interfacial Stresses. IEEE Sens. 2010, 2569–2572. [Google Scholar] [CrossRef]
- Wang, Y.; Hua, T.; Zhu, B.; Li, Q.; Yi, W.; Tao, X. Novel fabric pressure sensors: Design, fabrication, and characterization. Smart Mater. Struct. 2011, 20, 065015. [Google Scholar] [CrossRef]
- Yi, W.; Wang, Y.; Wang, G.; Tao, X. Investigation of carbon black/silicone elastomer/dimethylsilicone oil composites for flexible strain sensors. Polym. Test. 2012, 31, 677–684. [Google Scholar] [CrossRef]
- Wang, F.; Zhu, B.; Shu, L.; Tao, X.M. Flexible pressure sensors for smart protective clothing against impact loading. Smart Mater. Struct. 2014, 23, 15001. [Google Scholar] [CrossRef]
- Zhang, Z.F.; Tao, X.M.; Zhang, H.P.; Zhu, B. Soft Fiber Optic Sensors for Precision Measurement of Shear Stress and Pressure. IEEE Sens. J. 2013, 13, 1478–1482. [Google Scholar] [CrossRef]
- Zhang, A.-P.; Guan, B.-O.; Tao, X.-M.; Tam, H.-Y. Experimental and theoretical analysis of fiber Bragg gratings under lateral compression. Opt. Commun. 2002, 206, 81–87. [Google Scholar] [CrossRef]
- Zhang, A.-P.; Guan, B.-O.; Tao, X.-M.; Tam, H.-Y. Mode couplings in superstructure fiber Bragg gratings. IEEE Photonics Technol. Lett. 2002, 14, 489–491. [Google Scholar] [CrossRef]
- Zhang, A.-P.; Tao, X.-M.; Chung, W.-H.; Guan, B.-O.; Tam, H.-Y. Cladding-mode-assisted recouplings in concatenated long-period and fiber Bragg gratings. Opt. Lett. 2002, 27, 1214–1216. [Google Scholar] [CrossRef] [PubMed]
- Zhang, A.P.; Tam, H.-Y.; Tao, X.-M. Mode recoupling in a novel Bragg grating pair. Opt. Lett. 2003, 28, 519–521. [Google Scholar] [CrossRef]
- Sharath, U.; Sukreet, R.; Apoorva, G.; Asokan, S. Blood pressure evaluation using sphygmomanometry assisted by arterial pulse waveform detection by fiber Bragg grating pulse device. J. Biomed. Opt. 2013, 18, 67010. [Google Scholar] [CrossRef]
- Fajkus, M.; Nedoma, J.; Martinek, R.; Vasinek, V.; Nazeran, H.; Siska, P. A Non-Invasive Multichannel Hybrid Fiber-Optic Sensor System for Vital Sign Monitoring. Sensors 2017, 17, 111. [Google Scholar] [CrossRef]
- Xu, M.G.; Reekie, L.; Chow, Y.T.; Dakin, J.P. Optical in-Fiber Grating High-Pressure Sensor. Electron. Lett. 1993, 29, 398–399. [Google Scholar] [CrossRef]
- Wu, C.; Guan, B.O.; Wang, Z.; Feng, X.H. Characterization of Pressure Response of Bragg Gratings in Grapefruit Microstructured Fibers. J. Lightwave Technol. 2010, 28, 1392–1397. [Google Scholar] [CrossRef]
- Htein, L.; Liu, Z.; Gunawardena, D.; Tam, H.-Y. Single-ring suspended fiber for Bragg grating based hydrostatic pressure sensing. Opt. Express 2019, 27, 9655–9664. [Google Scholar] [CrossRef]
- Bhowmik, K.; Peng, G.D.; Luo, Y.; Ambikairajah, E.; Lovric, V.; Walsh, W.R.; Rajan, G. Experimental Study and Analysis of Hydrostatic Pressure Sensitivity of Polymer Fibre Bragg Gratings. J. Lightwave Technol. 2015, 33, 2456–2462. [Google Scholar] [CrossRef]
- Koyama, S.; Ishizawa, H.; Fujimoto, K.; Chino, S.; Kobayashi, Y. Influence of Individual Differences on the Calculation Method for FBG-Type Blood Pressure Sensors. Sensors 2017, 17, 48. [Google Scholar] [CrossRef]
- Liang, M.F.; Fang, X.Q.; Wu, G.; Xue, G.Z.; Li, H.W. A fiber Bragg grating pressure sensor with temperature compensation based on diaphragm-cantilever structure. Optik 2017, 145, 503–512. [Google Scholar] [CrossRef]
- Chen, C.P.; Lee, J.R.; Chang, C.N. Fracture mirror of optical fibers. Mater. Chem. Phys. 2003, 82, 698–704. [Google Scholar] [CrossRef]
- Ang, J.; Li, H.C.H.; Herszberg, I.; Bannister, M.K.; Mouritz, A.P. Tensile fatigue properties of fibre Bragg grating optical fibre sensors. Int. J. Fatigue 2010, 32, 762–768. [Google Scholar] [CrossRef]
- Othonos, A.; Kalli, K. Fiber Bragg Gratings: Fundamentals and Applications in Telecommunications and Sensing (Artech House Optoelectronics Library); Artech House: Boston, MA, USA; London, UK, 1999. [Google Scholar]
- Werneck, M.M.; Allil, R.C.; Ribeiro, B.A.; de Nazaré, F.V. A guide to fiber Bragg grating sensors. In Current Trends in Short-and Long-Period Fiber Gratings; InTech: London, UK, 2013. [Google Scholar]
- Shu, Y.; Li, C.; Wang, Z.; Mi, W.T.; Li, Y.X.; Ren, T.L. A Pressure Sensing System for Heart Rate Monitoring with Polymer-Based Pressure Sensors and an Anti-Interference Post Processing Circuit. Sensors 2015, 15, 3224–3235. [Google Scholar] [CrossRef]
- Ramuz, M.; Tee, B.C.K.; Tok, J.B.H.; Bao, Z.N. Transparent, Optical, Pressure-Sensitive Artificial Skin for Large-Area Stretchable Electronics. Adv. Mater. 2012, 24, 3223–3227. [Google Scholar] [CrossRef]
- Yang, B.; Zeng, W.; Peng, Z.H.; Liu, S.R.; Chen, K.; Tao, X.M. A Fully Verified Theoretical Analysis of Contact-Mode Triboelectric Nanogenerators as a Wearable Power Source. Adv. Energy Mater. 2016, 6, 1600505. [Google Scholar] [CrossRef]
- Tseng, A.A.; Müller, J.; Hahn, Y.-H. Mechanical and bending characteristics of invar sheets. Mater. Des. 1996, 17, 89–96. [Google Scholar] [CrossRef]
- MacRae, B.A.; Cotter, J.D.; Laing, R.M. Compression Garments and Exercise Garment Considerations, Physiology and Performance. Sports Med. 2011, 41, 815–843. [Google Scholar] [CrossRef]
- Gupta, D. Functional clothing-Definition and classification. Indian J. Fibre Text. 2011, 36, 321–326. [Google Scholar]
- Dziuda, Ł.; Skibniewski, F.W. A new approach to ballistocardiographic measurements using fibre Bragg grating-based sensors. Biocybern. Biomed. Eng. 2014, 34, 101–116. [Google Scholar] [CrossRef]
- Kurasawa, S.; Koyama, S.; Ishizawa, H.; Fujimoto, K.; Chino, S. Verification of Non-Invasive Blood Glucose Measurement Method Based on Pulse Wave Signal Detected by FBG Sensor System. Sensors 2017, 17, 2702. [Google Scholar] [CrossRef]
- Hsu, E. Pulse Diagnosis in Early Chinese Medicine: The Telling Touch; Cambridge University Press: Cambridge, UK, 2010; Volume 68. [Google Scholar]







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, B.; Liu, S.; Wang, X.; Yin, R.; Xiong, Y.; Tao, X. Highly Sensitive and Durable Structured Fibre Sensors for Low-Pressure Measurement in Smart Skin. Sensors 2019, 19, 1811. https://doi.org/10.3390/s19081811
Yang B, Liu S, Wang X, Yin R, Xiong Y, Tao X. Highly Sensitive and Durable Structured Fibre Sensors for Low-Pressure Measurement in Smart Skin. Sensors. 2019; 19(8):1811. https://doi.org/10.3390/s19081811
Chicago/Turabian StyleYang, Bao, Su Liu, Xi Wang, Rong Yin, Ying Xiong, and Xiaoming Tao. 2019. "Highly Sensitive and Durable Structured Fibre Sensors for Low-Pressure Measurement in Smart Skin" Sensors 19, no. 8: 1811. https://doi.org/10.3390/s19081811
APA StyleYang, B., Liu, S., Wang, X., Yin, R., Xiong, Y., & Tao, X. (2019). Highly Sensitive and Durable Structured Fibre Sensors for Low-Pressure Measurement in Smart Skin. Sensors, 19(8), 1811. https://doi.org/10.3390/s19081811