An Orthogonal Weighted Occupancy Likelihood Map with IMU-Aided Laser Scan Matching for 2D Indoor Mapping


Abstract
1. Introduction
2. Methods
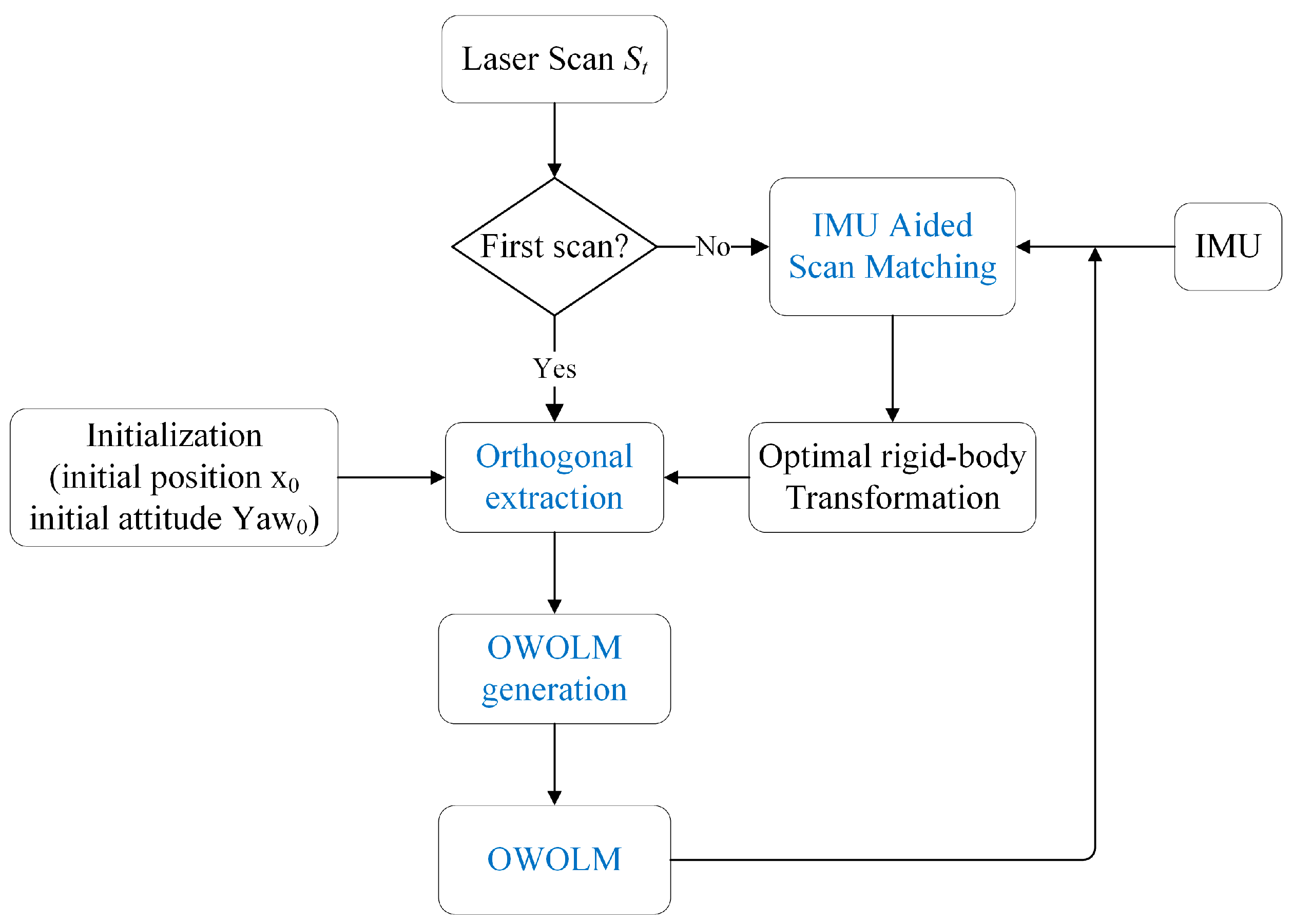
2.1. Algorithm Overview
2.2. IMU-aided Scan-to-Map Matching
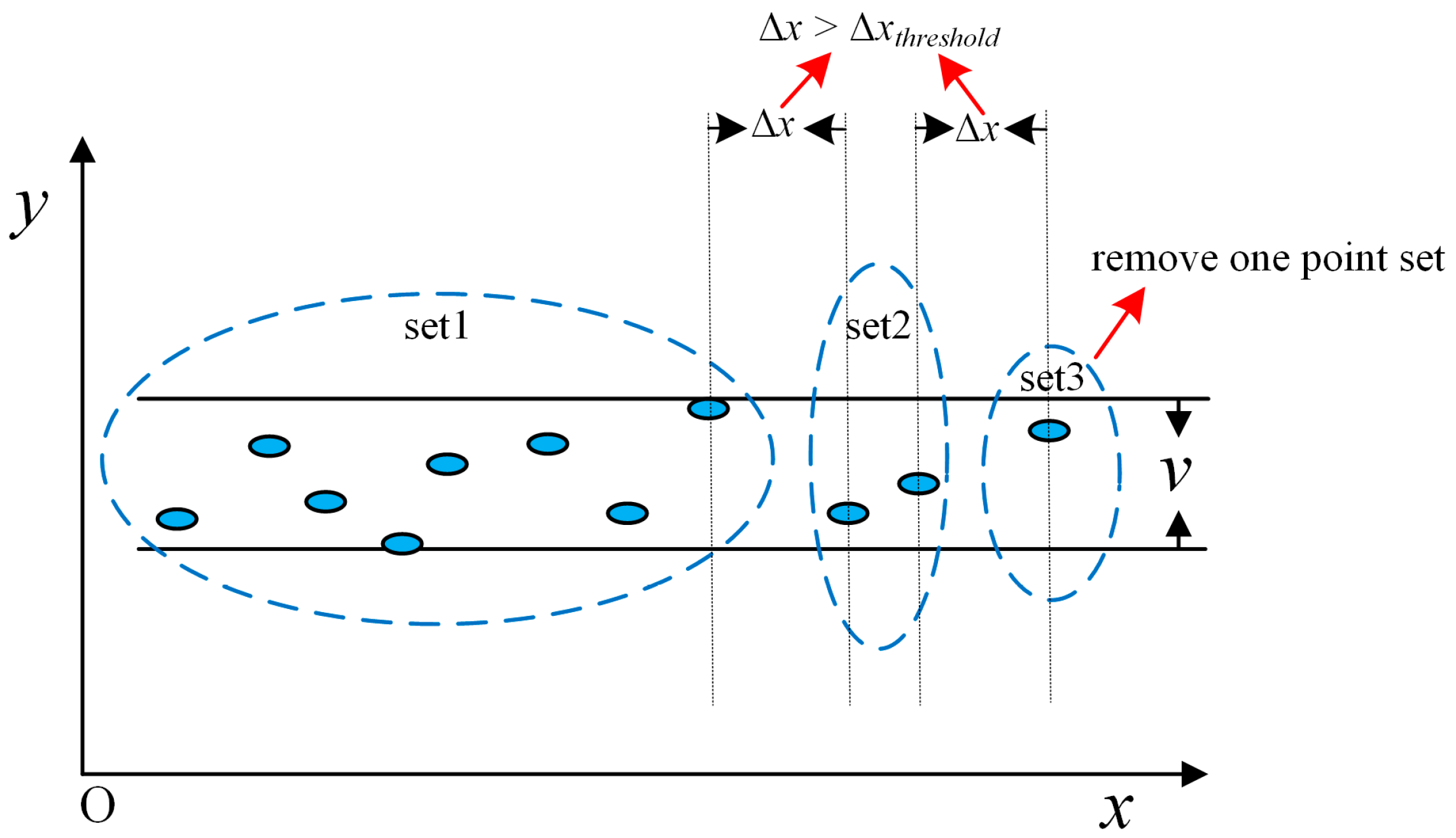
2.3. Orthogonal extraction by blurred segments
| Algorithm 1: Pseudo-code of OBS extraction, where OBSs are parallel to x coordinate axe |
| Requires: 1. Coordinates (x, y) of scan points 2. Width v of OBS 3. Minimum number n of points in OBS 4. Minimum length l of OBS, which is 1 in this paper 5. Maximum distance between the adjacent points in OBS Δxthreshold sort the scan points according to the y-coordinates in ascending order for each point with y-coordinates y collect the set of points in the y-coordinates between y and y + v end for Find the set with the maximum number N of points if N > n sort the set of points according to the x-coordinates in ascending order split the set if the adjacent x-coordinates Δx >Δxthreshold else exit the loop end if for each set if the length > l save this set of points remove the point from the scan points end if end for |
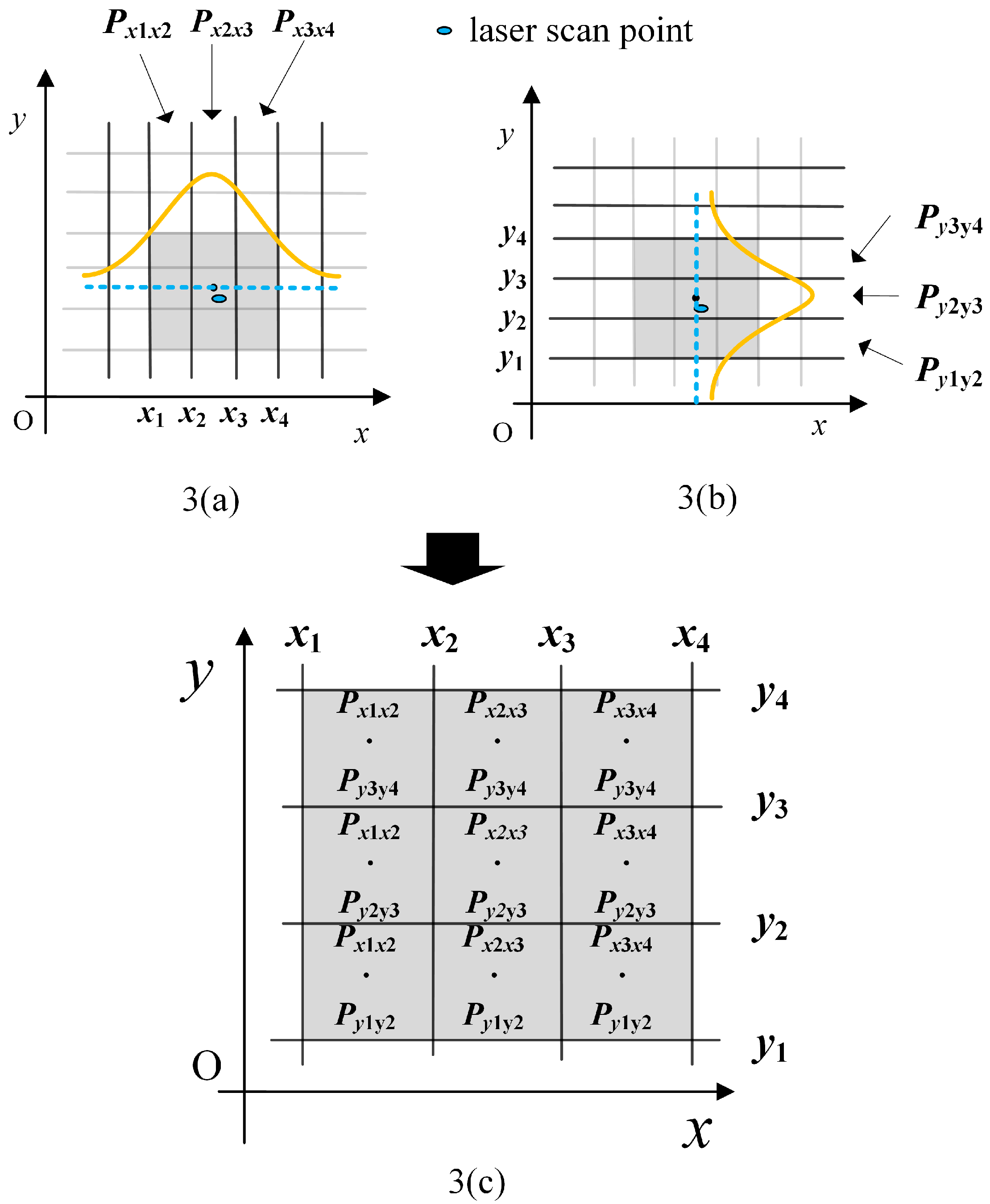
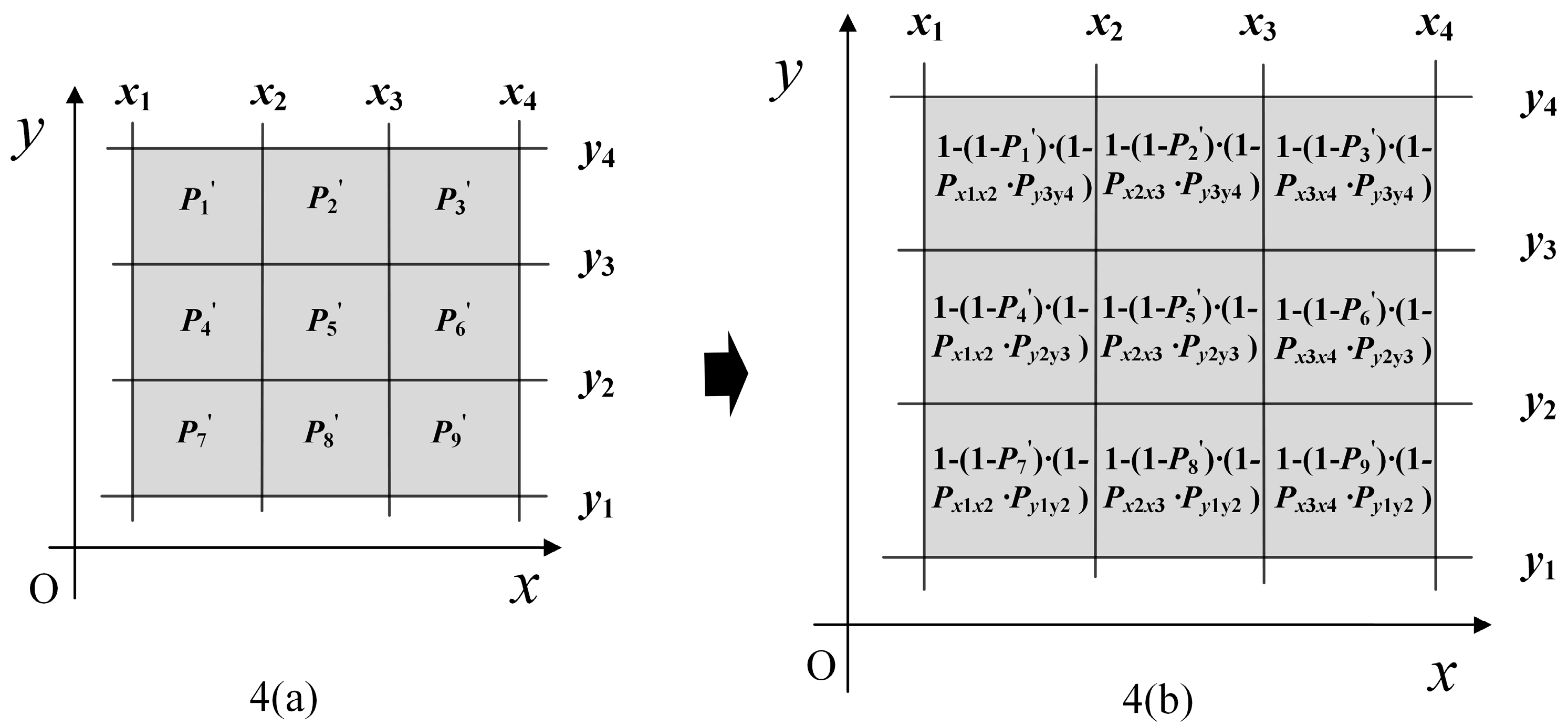
2.4. OWOLM Generation
3. Experimental Results
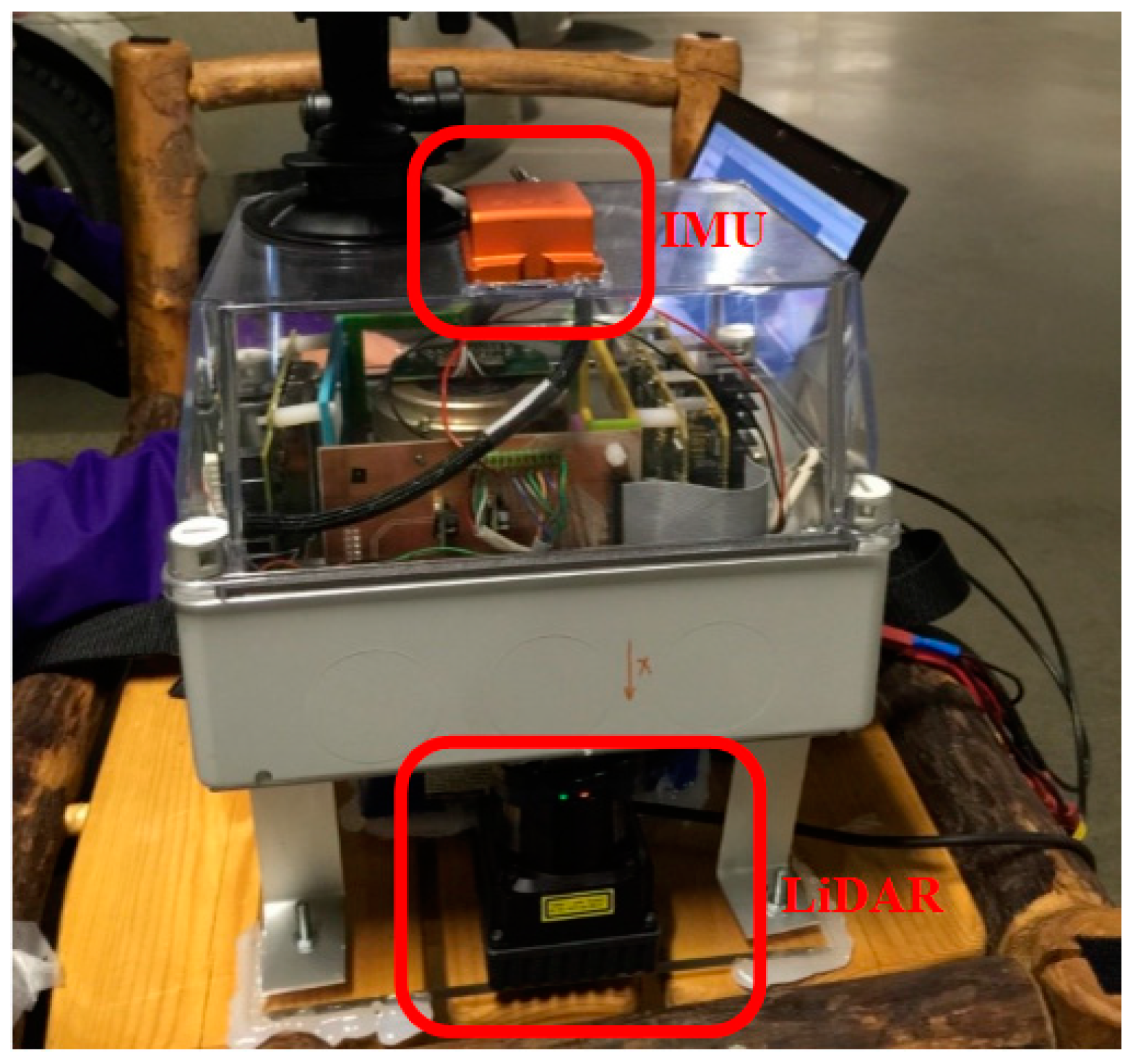
3.1. System overview
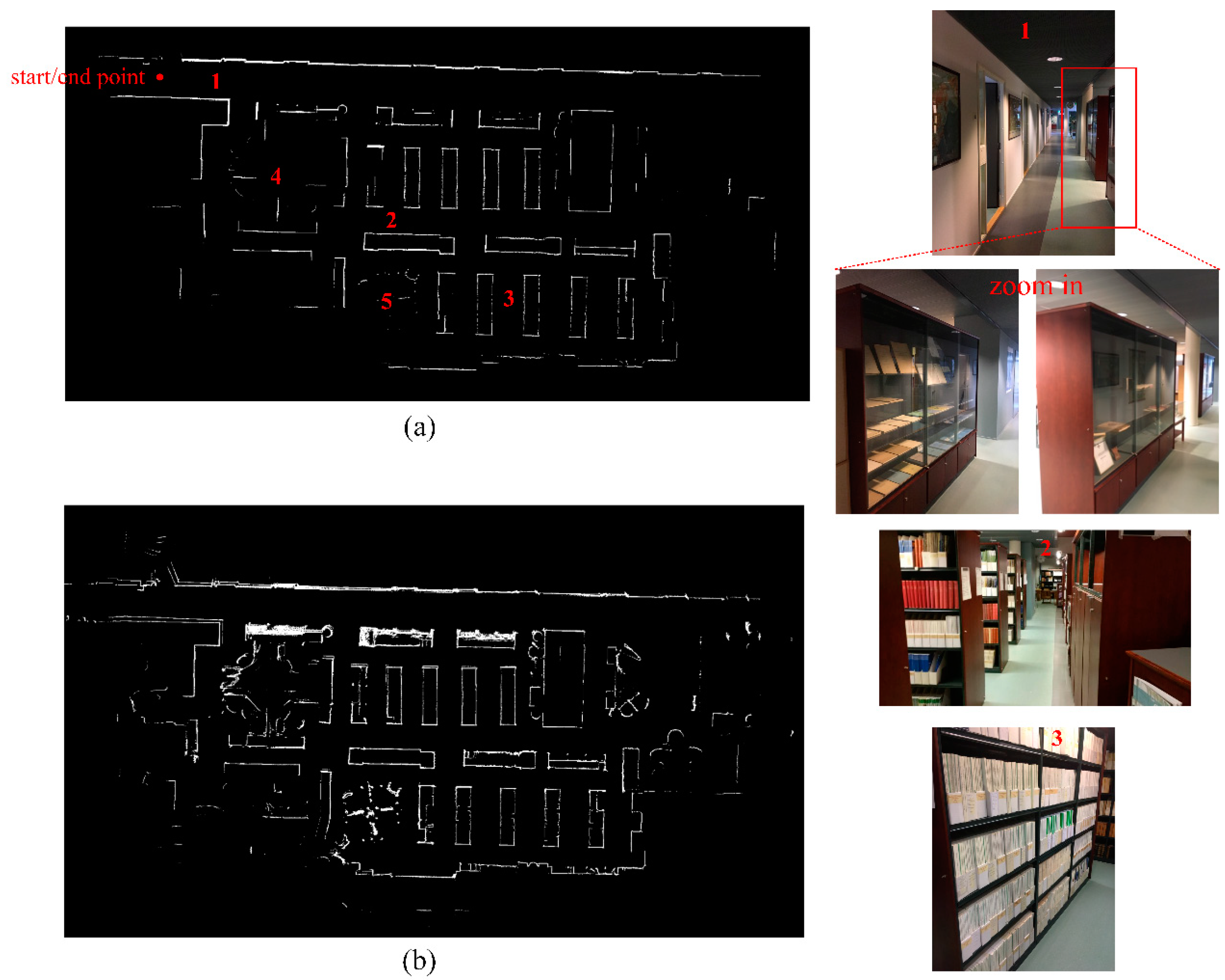
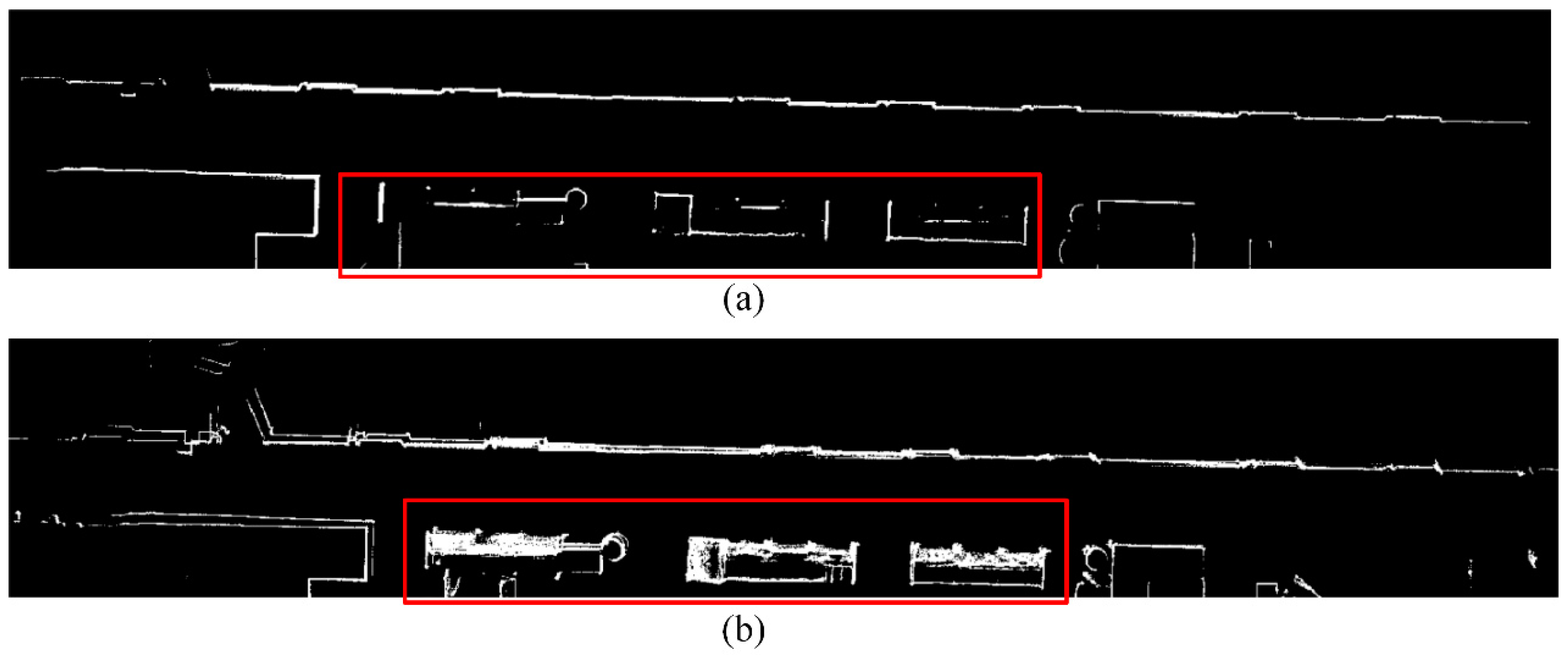
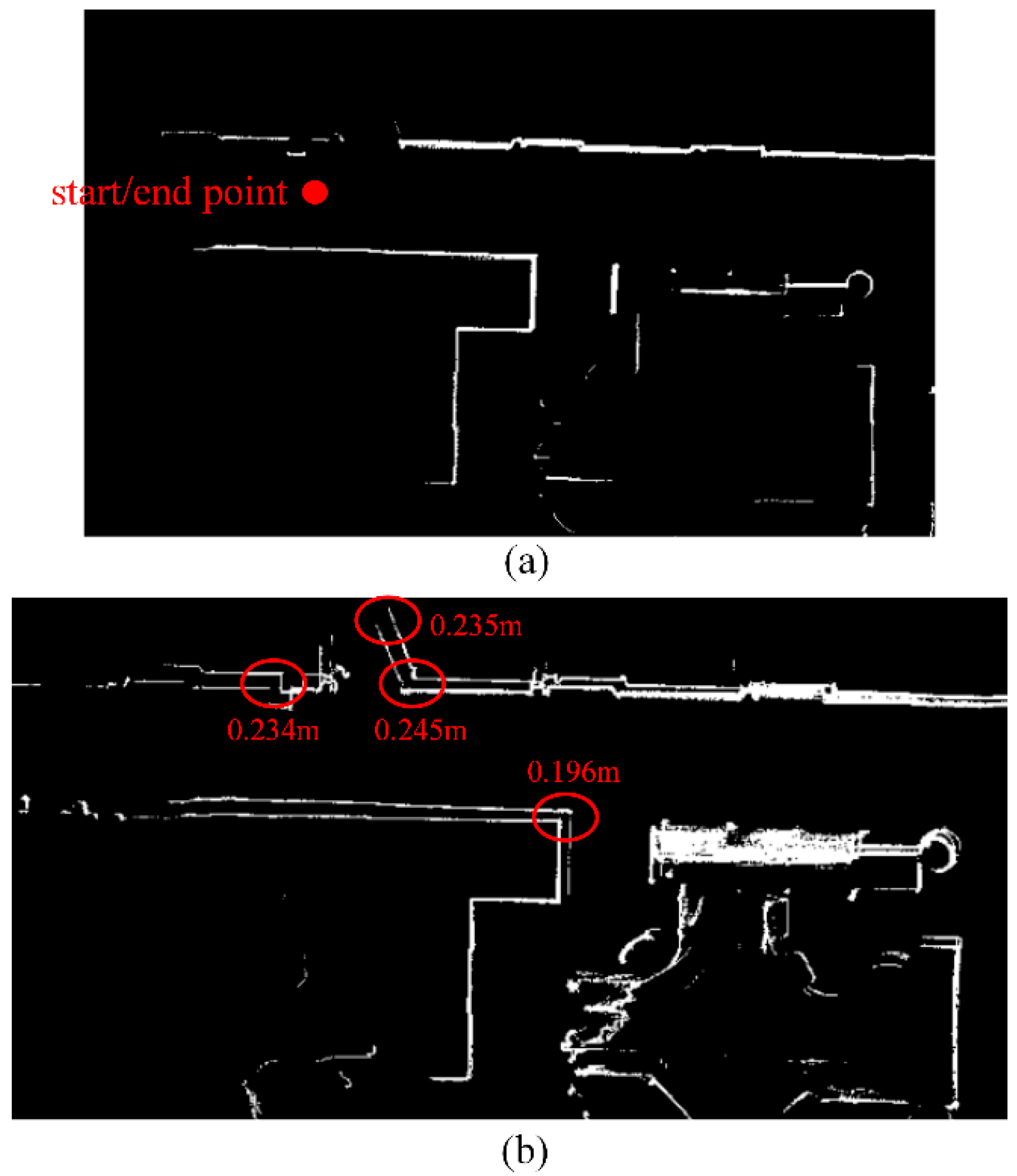
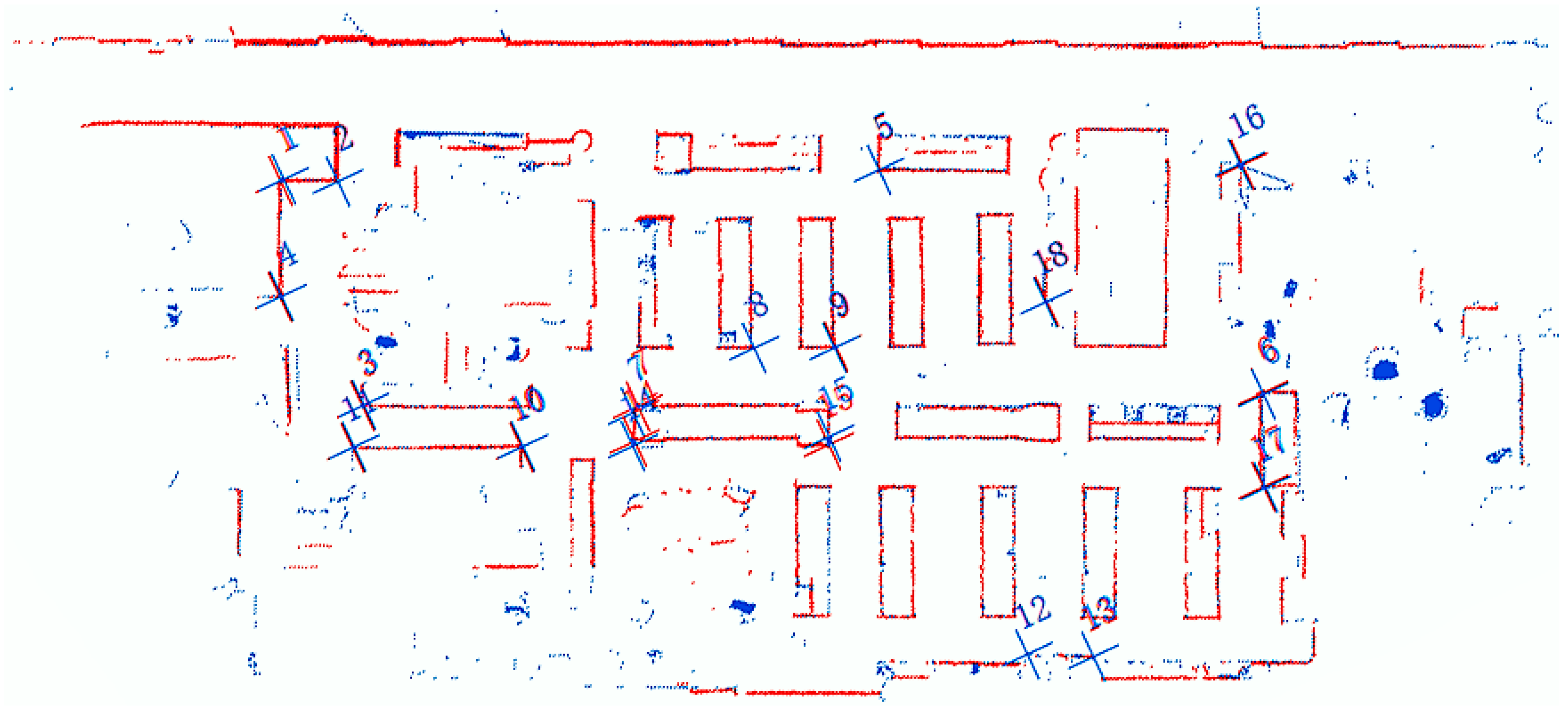
3.2. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Opromolla, R.; Fasano, G.; Grassi, M.; Savvaris, A.; Moccia, A. PCA-Based Line Detection from Range Data for Mapping and Localization-Aiding of UAVs. Int. J. Aerosp. Eng. 2017, 2017, 1–14. [Google Scholar] [CrossRef]
- Yoshisada, H.; Yamada, Y.; Hiromori, A.; Yamaguchi, H.; Higashino, T. Indoor map generation from multiple LiDAR point clouds. In Proceedings of the IEEE International Conference on Smart Computing (SMARTCOMP), Vienna, Austria, 2–6 July 2018; pp. 73–80. [Google Scholar]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Bourmaud, G.; Mégret, R. Robust large scale monocular visual SLAM. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1638–1647. [Google Scholar]
- Choi, S.; Zhou, Q.-Y.; Koltun, V. Robust reconstruction of indoor scenes. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 5556–5565. [Google Scholar]
- Endres, F.; Hess, J.; Sturm, J.; Cremers, D.; Burgard, W. 3-D mapping with an RGB-D camera. IEEE Trans. Robot. 2014, 30, 177–187. [Google Scholar] [CrossRef]
- Meng, X.; Gao, W.; Hua, Z. Dense RGB-D SLAM with multiple cameras. Sensors 2018, 18, 2118. [Google Scholar] [CrossRef]
- Valiente, D.; Payá, L.; Jiménez, L.M.; Sebastián, J.M.; Reinoso, O. Visual Information Fusion through Bayesian Inference for Adaptive Probability-Oriented Feature Matching. Sensors 2018, 18, 2041. [Google Scholar] [CrossRef] [PubMed]
- An, S.-Y.; Kang, J.-G.; Lee, L.-K.; Oh, S.-Y. Line Segment-Based Indoor Mapping with Salient Line Feature Extraction. Adv. Robot. 2012, 26, 437–460. [Google Scholar] [CrossRef]
- Aghamohammadi, A.; Tamjidi, A.H.; Taghirad, H.D. SLAM using single laser range finder. In Proceedings of the 17th IFAC World Congress, Seoul, Korea, 6–11 July 2008; p. 23. [Google Scholar]
- Tang, J.; Chen, Y.; Jaakkola, A.; Liu, J.; Hyyppä, J.; Hyyppä, H. NAVIS-An UGV indoor positioning system using laser scan matching for large-area real-time applications. Sensors 2014, 14, 11805–11824. [Google Scholar] [CrossRef] [PubMed]
- Burguera, A.; González, Y.; Oliver, G.; Gonzalez-Cid, Y.; Oliver-Codina, G. On the use of likelihood fields to perform sonar scan matching localization. Auton. Robot. 2009, 26, 203–222. [Google Scholar] [CrossRef]
- Olson, E.B. Real-time correlative scan matching. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; pp. 4387–4393. [Google Scholar]
- Steux, B.; El Hamzaoui, O. tinySLAM: A SLAM algorithm in less than 200 lines C-language program. In Proceedings of the Vision (ICARCV 2010), Singapore, 7–10 December 2010; pp. 1975–1979. [Google Scholar]
- Wen, J.; Qian, C.; Tang, J.; Liu, H.; Ye, W.; Fan, X. 2D LiDAR SLAM Back-End Optimization with Control Network Constraint for Mobile Mapping. Sensors 2018, 18, 3668. [Google Scholar] [CrossRef] [PubMed]
- Im, J.H.; Im, S.H.; Jee, G.I. Extended line map-based precise vehicle localization using 3D LiDAR. Sensors 2018, 18, 3179. [Google Scholar] [CrossRef]
- Aghamohammadi, A.A.; Taghirad, H.D.; Tamjidi, A.H.; Mihankhah, E. Feature-Based laser scan matching for accurate and high speed mobile robot localization. In Proceedings of the European Conference on Mobile Robots (ECMR), Freiburg, Germany, 19–21 September 2007. [Google Scholar]
- Choi, Y.H.; Lee, T.K.; Oh, S.Y. A line feature based SLAM with low grade range sensors using geometric constraints and active exploration for mobile robot. Auton. Robot. 2008, 24, 13–27. [Google Scholar] [CrossRef]
- Kuo, W.J.; Tseng, S.H.; Yu, J.Y.; Fu, L.C. A hybrid approach to RBPF based SLAM with grid mapping enhanced by line matching. In Proceedings of the IEEE Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 1523–1528. [Google Scholar]
- Brunskill, E.; Roy, N. SLAM using incremental probabilistic PCA and dimensionality reduction. In Proceedings of the IEEE Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 342–347. [Google Scholar]
- Gallant, M.J.; Marshall, J.A. The LiDAR compass: Extremely lightweight heading estimation with axis maps. Robot. Auton. Syst. 2016, 82, 35–45. [Google Scholar] [CrossRef]
- Kuo, B.-W.; Chang, H.-H.; Chen, Y.-C.; Huang, S.-Y. A Light-and-Fast SLAM Algorithm for Robots in Indoor Environments Using Line Segment Map. J. Robot. 2011, 2011, 1–12. [Google Scholar] [CrossRef]
- Nguyen, V.; Harati, A.; Martinelli, A.; Siegwart, R.; Tomatis, N. Orthogonal SLAM: A step toward lightweight indoor autonomous navigation. In Proceedings of the IEEE Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 5007–5012. [Google Scholar]
- Wang, C.; Hou, S.; Wen, C.; Gong, Z.; Li, Q.; Sun, X.; Li, J. Semantic line framework-based indoor building modeling using backpacked laser scanning point cloud. ISPRS J. Photogramm. Remote. Sens. 2018, 143, 150–166. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. In Proceedings of the Robotics-DL Tentative, International Society for Optics and Photonics, Boston, MA, USA, 30 April 1992; pp. 586–606. [Google Scholar]
- Diosi, A.; Kleeman, L. Laser scan matching in polar coordinates with application to SLAM. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3317–3322. [Google Scholar]
- Bosse, M.C. ATLAS: A Framework for Large Scale Automated Mapping and Localization. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2004. [Google Scholar]
- Censi, A. An ICP variant using a point-to-line metric. In Proceedings of the IEEE Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 18–23 May 2008; pp. 19–25. [Google Scholar]
- Bachrach, A.; Prentice, S.; He, R.; Roy, N. RANGE-Robust autonomous navigation in GPS-denied environments. J. Robot. 2011, 28, 644–666. [Google Scholar] [CrossRef]
- Pfister, S.T. Algorithms for Mobile Robot Localization and Mapping, Incorporating Detailed Noise Modeling and Multi-Scale Feature Extraction. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 2006. [Google Scholar]
- Li, L.; Yao, J.; Xie, R.; Tu, J.; Feng, C. Laser-based slam with efficient occupancy likelihood map learning for dynamic indoor scenes. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 119–126. [Google Scholar] [CrossRef]
- Kohlbrecher, S.; Von Stryk, O.; Meyer, J.; Klingauf, U. A flexible and scalable SLAM system with full 3D motion estimation. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Kyoto, Japan, 1–5 Novenber 2011; pp. 155–160. [Google Scholar]
- Rapp, M.; Barjenbruch, M.; Hahn, M.; Dickmann, J.; Dietmayer, K.; Matthias, R. Clustering improved grid map registration using the normal distribution transform. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 249–254. [Google Scholar]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LiDAR SLAM. In Proceedings of the IEEE Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- Tang, J.; Chen, Y.; Niu, X.; Wang, L.; Chen, L.; Liu, J.; Shi, C.; Hyyppa, J. LiDAR scan matching aided inertial navigation system in GNSS-denied environments. Sensors 2015, 15, 16710–16728. [Google Scholar] [CrossRef] [PubMed]
- Nützi, G.; Weiss, S.; Scaramuzza, D.; Siegwart, R. Fusion of IMU and vision for absolute scale estimation in monocular SLAM. Int. Robot. Syst. 2011, 61, 287–299. [Google Scholar] [CrossRef]
- Klein, I.; Filin, S. LiDAR and INS fusion in periods of GPS outages for mobile laser scanning mapping systems. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 3812, 231–236. [Google Scholar] [CrossRef]
- Shin, E.H. Estimation Techniques for Low-Cost Inertial Navigation. Available online: http://www.geomatics.ucalgary.ca/links/GradTheses.html (accessed on 10 July 2015).
- Nguyen, V.; Martinelli, A.; Tomatis, N.; Siegwart, R. A comparison of line extraction algorithms using 2D laser rangefinder for indoor mobile robotics. In Proceedings of the IEEE Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 1929–1934. [Google Scholar]
- Pavlidis, T.; Horowitz, S.L. Segmentation of plane curves. IEEE Trans. Comput. 1974, 100, 860–870. [Google Scholar] [CrossRef]
- Siadat, A.; Kaske, A.; Klausmann, S.; Dufaut, M.; Husson, R. An optimized segmentation method for a 2D laser-scanner applied to mobile robot navigation. IFAC Proc. Vol. 1997, 30, 149–154. [Google Scholar] [CrossRef]
- Debled-Rennesson, I.; Feschet, F.; Rouyer-Degli, J. Optimal blurred segments decomposition in linear time. In Proceedings of the International Conference on Discrete Geometry for Computer Imagery, Poitiers, France, 11–13 April 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 371–382. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| residual_x | 5.8 | −1.8 | 2.5 | 2 | 1.4 | 1.9 | −12.5 | −0.6 | −1.6 | 2.9 | 1 | 0.3 | 1.3 | −8.5 | 6.2 | −1 | 3.5 | −2.7 |
| residual_y | −1.5 | 0.1 | 1.5 | 0.4 | 2.2 | −4.7 | −6.7 | 0.3 | 1.7 | −1.1 | 0.5 | 1.5 | 2.6 | −7.4 | 14.5 | 1.8 | −6.2 | 0.7 |
| residual | 6 | 1.8 | 2.9 | 2.1 | 2.6 | 5 | 14.2 | 0.7 | 2.3 | 3.1 | 1.1 | 1.6 | 2.9 | 11.3 | 15.7 | 2.1 | 7.2 | 2.8 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, C.; Zhang, H.; Tang, J.; Li, B.; Liu, H. An Orthogonal Weighted Occupancy Likelihood Map with IMU-Aided Laser Scan Matching for 2D Indoor Mapping. Sensors 2019, 19, 1742. https://doi.org/10.3390/s19071742
Qian C, Zhang H, Tang J, Li B, Liu H. An Orthogonal Weighted Occupancy Likelihood Map with IMU-Aided Laser Scan Matching for 2D Indoor Mapping. Sensors. 2019; 19(7):1742. https://doi.org/10.3390/s19071742
Chicago/Turabian StyleQian, Chuang, Hongjuan Zhang, Jian Tang, Bijun Li, and Hui Liu. 2019. "An Orthogonal Weighted Occupancy Likelihood Map with IMU-Aided Laser Scan Matching for 2D Indoor Mapping" Sensors 19, no. 7: 1742. https://doi.org/10.3390/s19071742
APA StyleQian, C., Zhang, H., Tang, J., Li, B., & Liu, H. (2019). An Orthogonal Weighted Occupancy Likelihood Map with IMU-Aided Laser Scan Matching for 2D Indoor Mapping. Sensors, 19(7), 1742. https://doi.org/10.3390/s19071742