Power-Frequency Electric Field Sensing Utilizing a Twin-FBG Fabry–Perot Interferometer and Polyimide Tubing with Space Charge as Field Sensing Element †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Sensor Structure, Dielectric Charging and Operation Principle
2.1. Sensor Structure
2.2. Dielectric Charging
2.3. Operation Principles
3. Sensor Fabrication and System Configuration
3.1. Sensor Fabrication
- Dry PI tubing in a chamber with humidity ≤20% RH and temperature at 110 °C for 4 h,
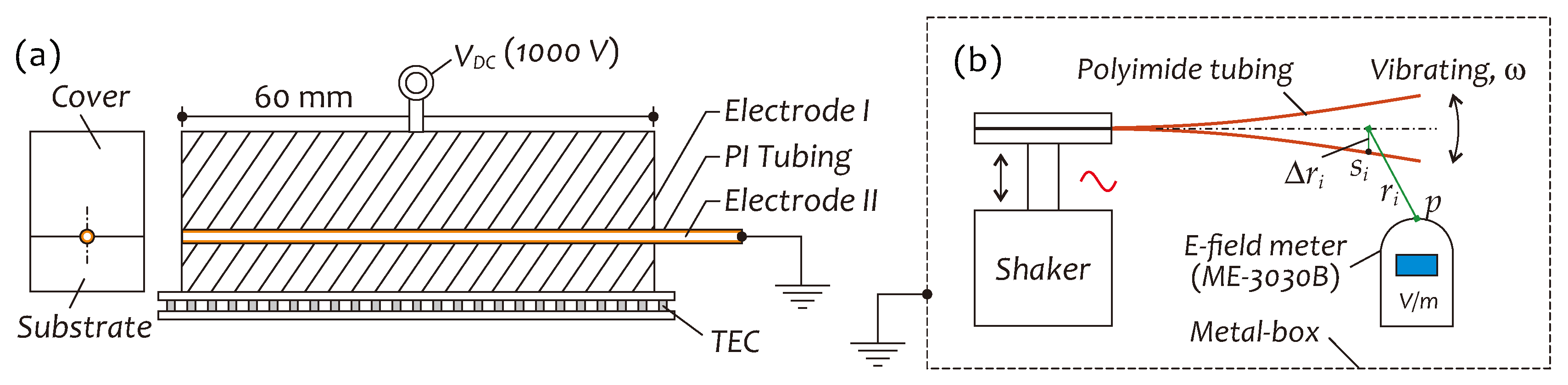
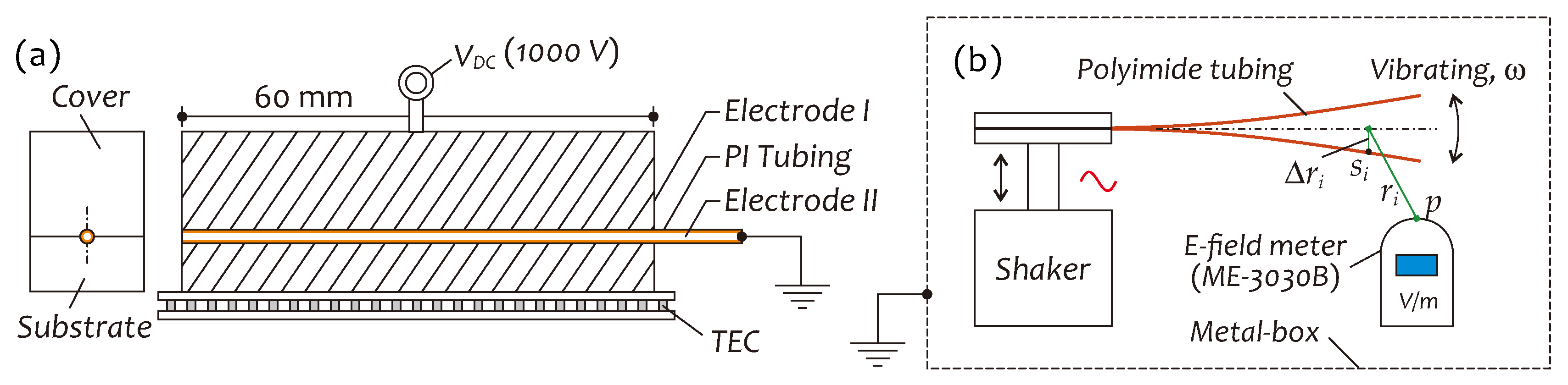
- Charge PI tubing by using a jig as shown in Figure 2a, imposing a 1000-V DC voltage on two electrodes and keeping this state at 80 °C for at least 1 h,
- Remove the DC voltage, keep PI tubing at 10 °C for 10 min and then take it out from the jig,
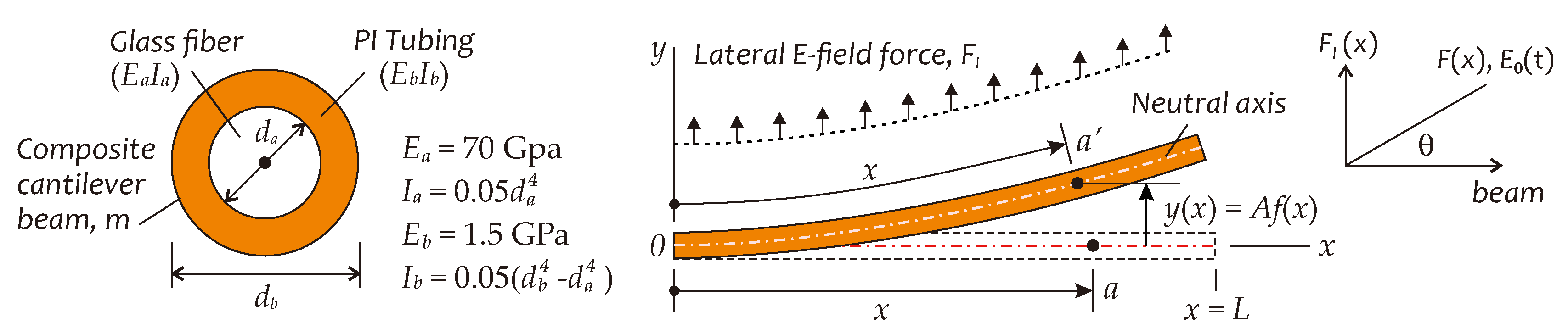
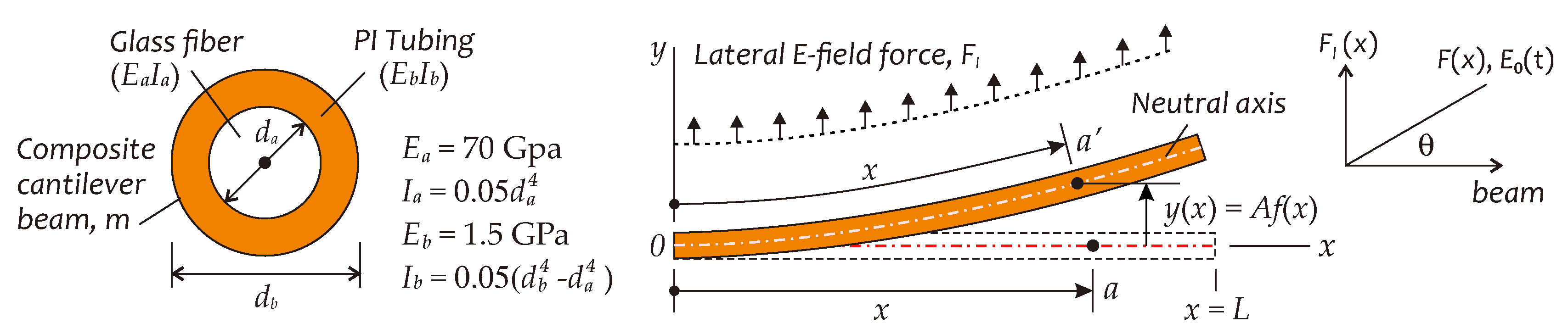
- Insert the twin-FBG fiber sensor into the charged PI tubing to constitute a composite cantilever beam (Figure 4b) with a pre-tailored length,
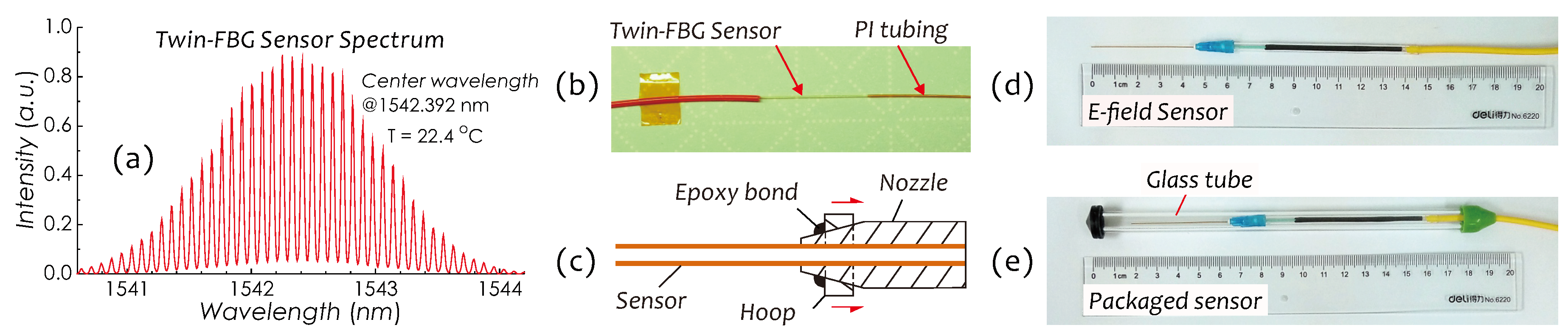
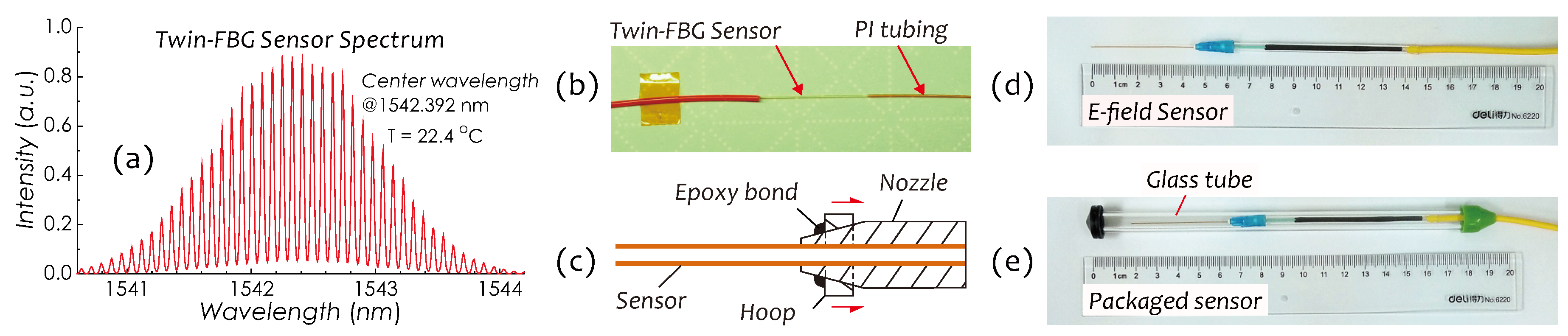
- Hold the beam with a plastic fastener (nozzle), fasten it by pushing a hoop toward the center of nozzle, and then fix them with the epoxy bond to form a sensor (see Figure 4c,d),
- Mount the sensor on a shaker oscillating in a frequency-scanning mode to check the resonant frequency of the sensor,
- Finely tailor the length of beam to maximize the vibrating amplitude at power frequency, and
- Package the sensor into a glass tube containing desiccants and then seal this tube (see Figure 4e).
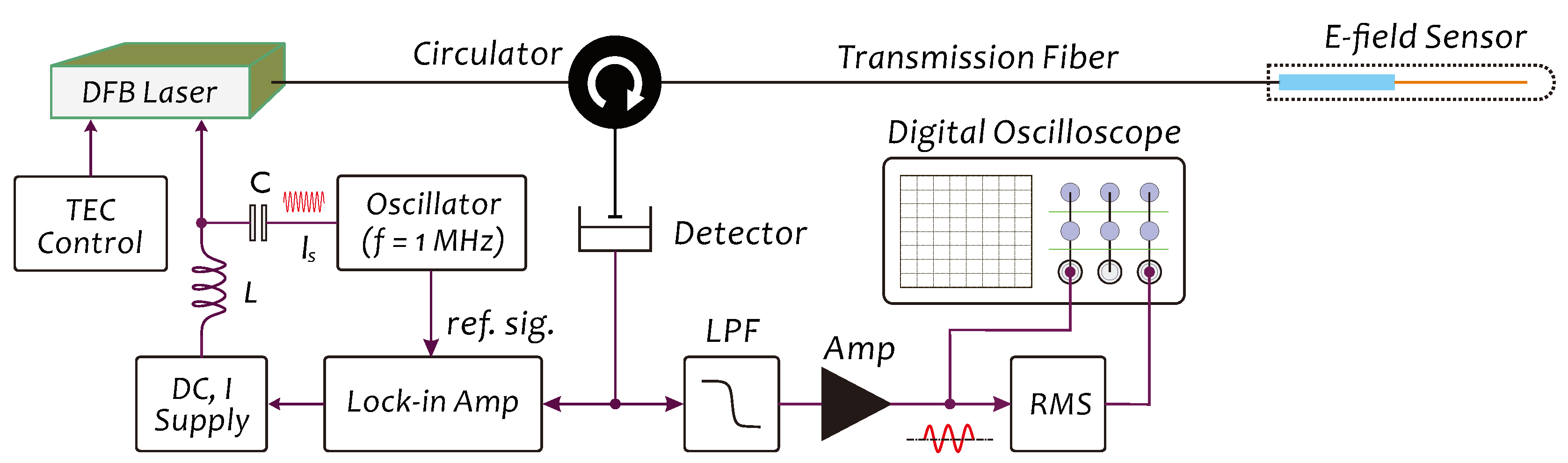
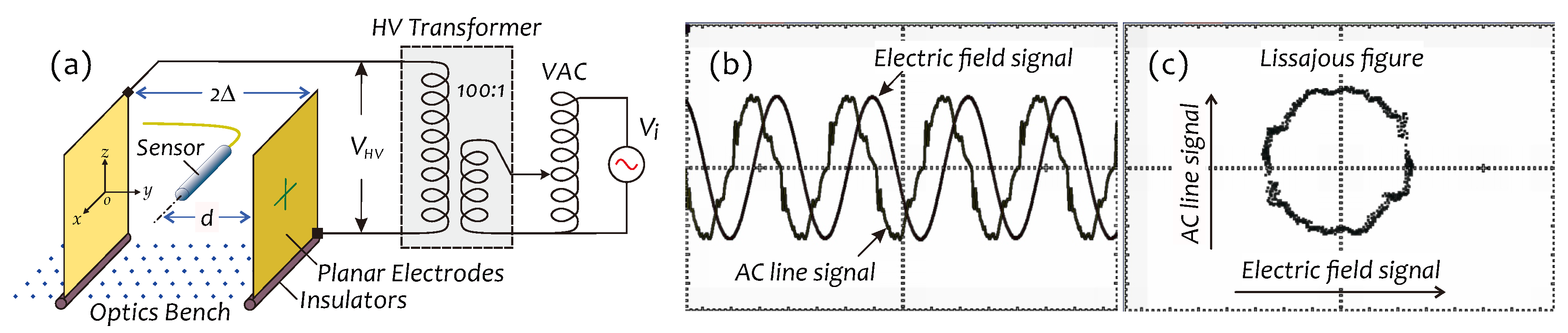
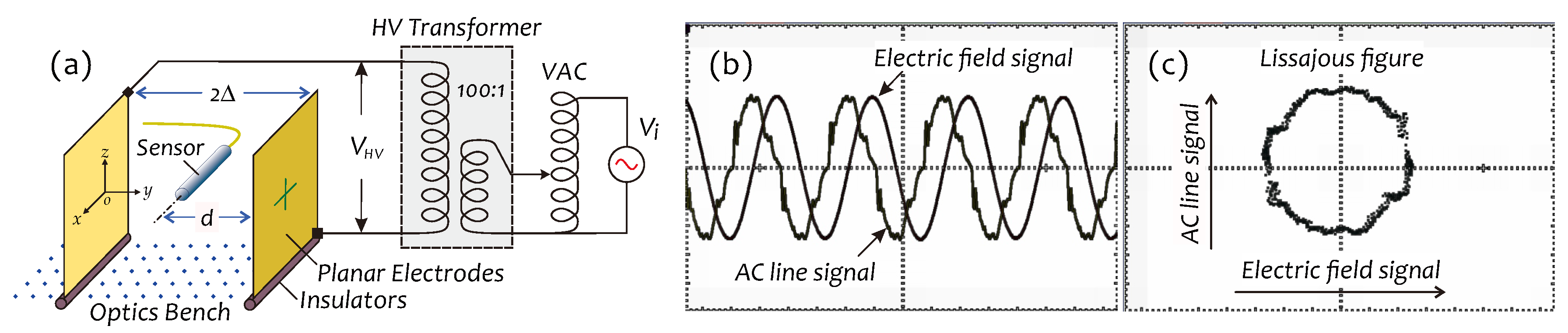
3.2. System Configuration
4. Experimental Results
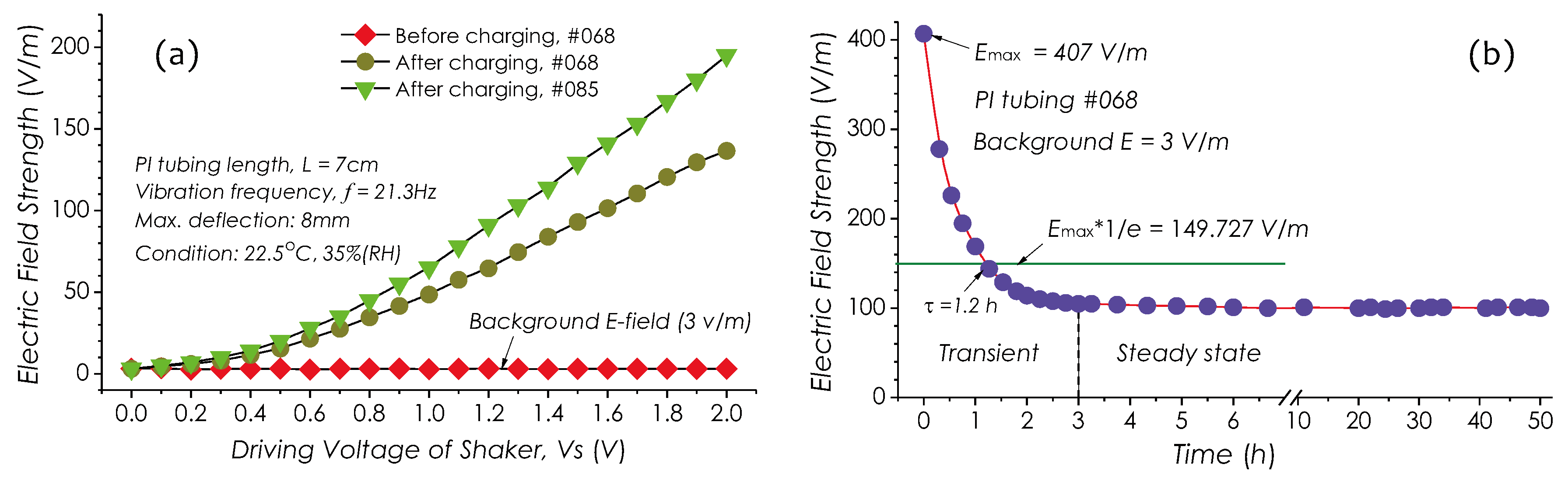
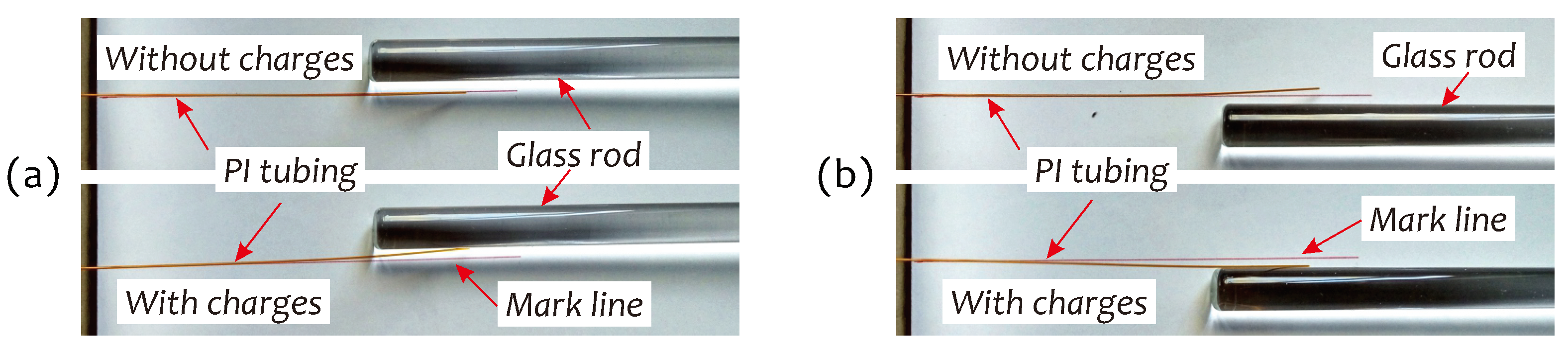
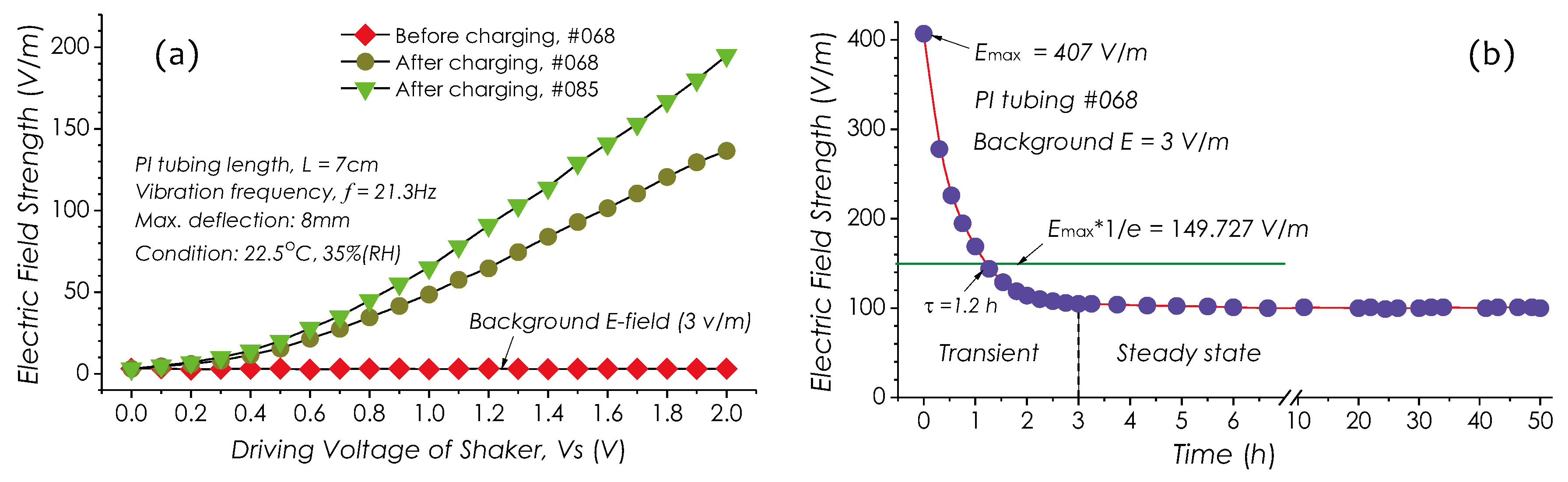
4.1. Charging Effects of PI Tubing
4.2. Vibration Property of Sensor
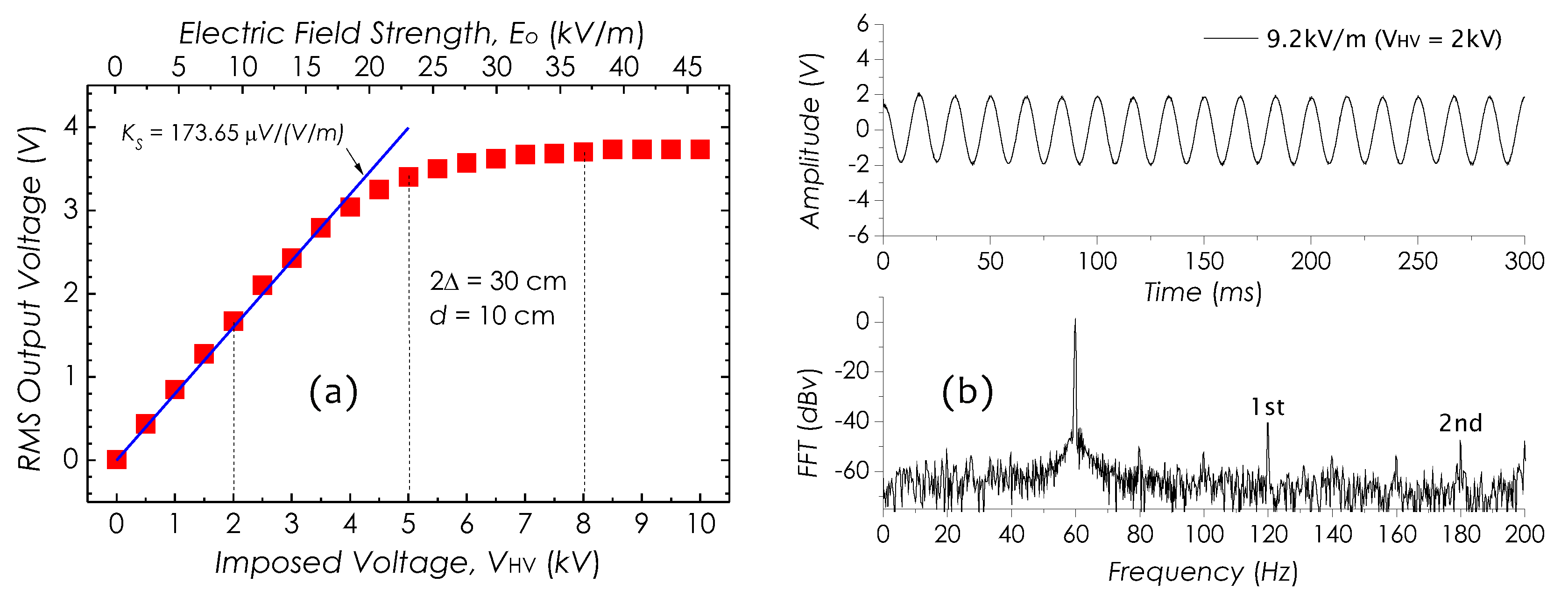
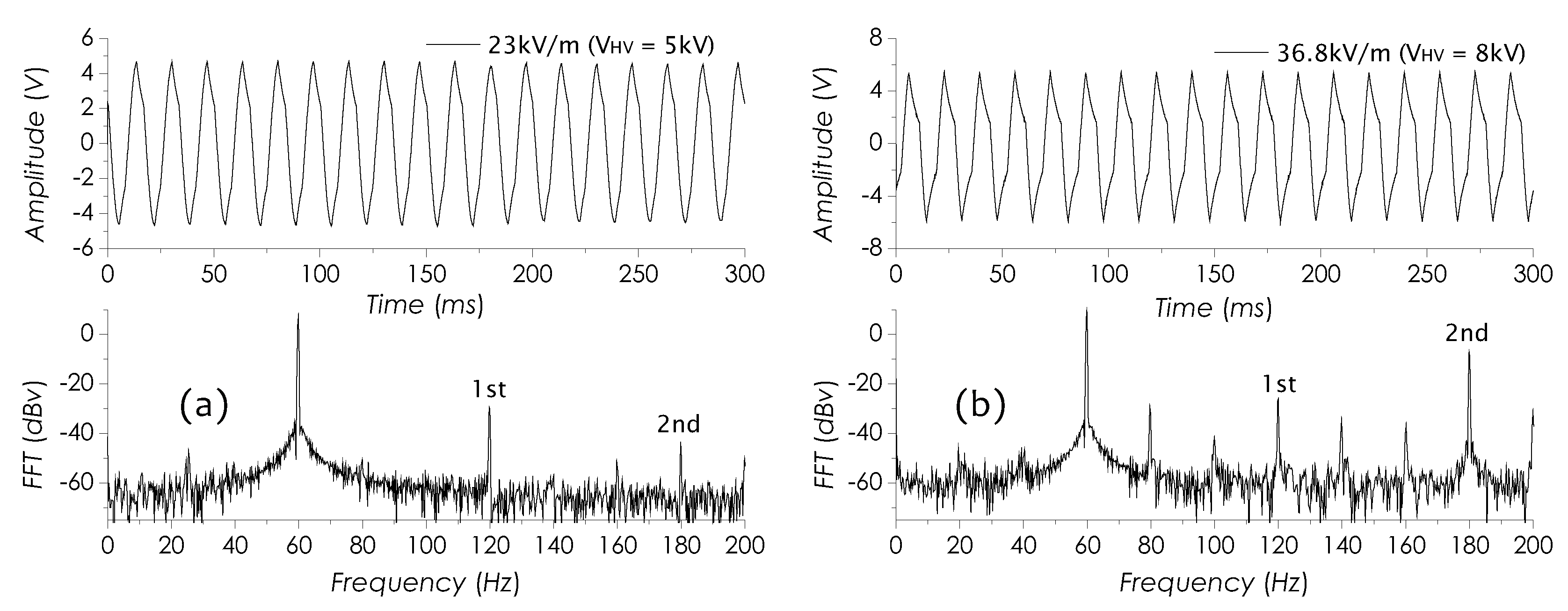
4.3. Detection Property of Sensor
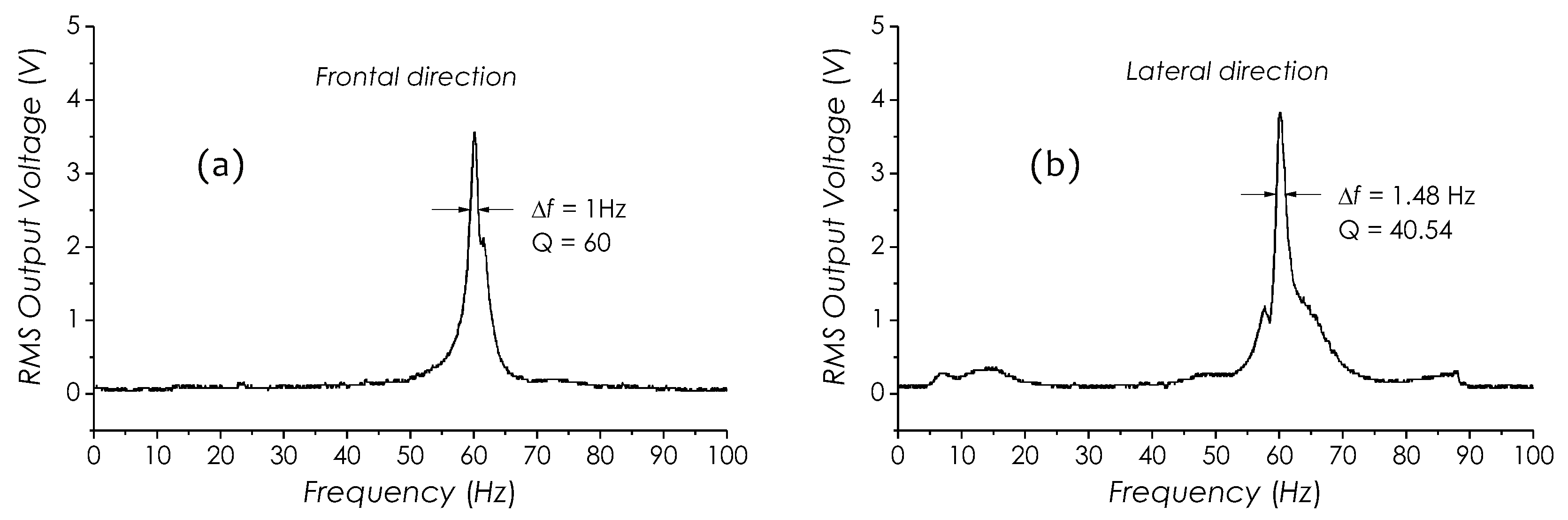
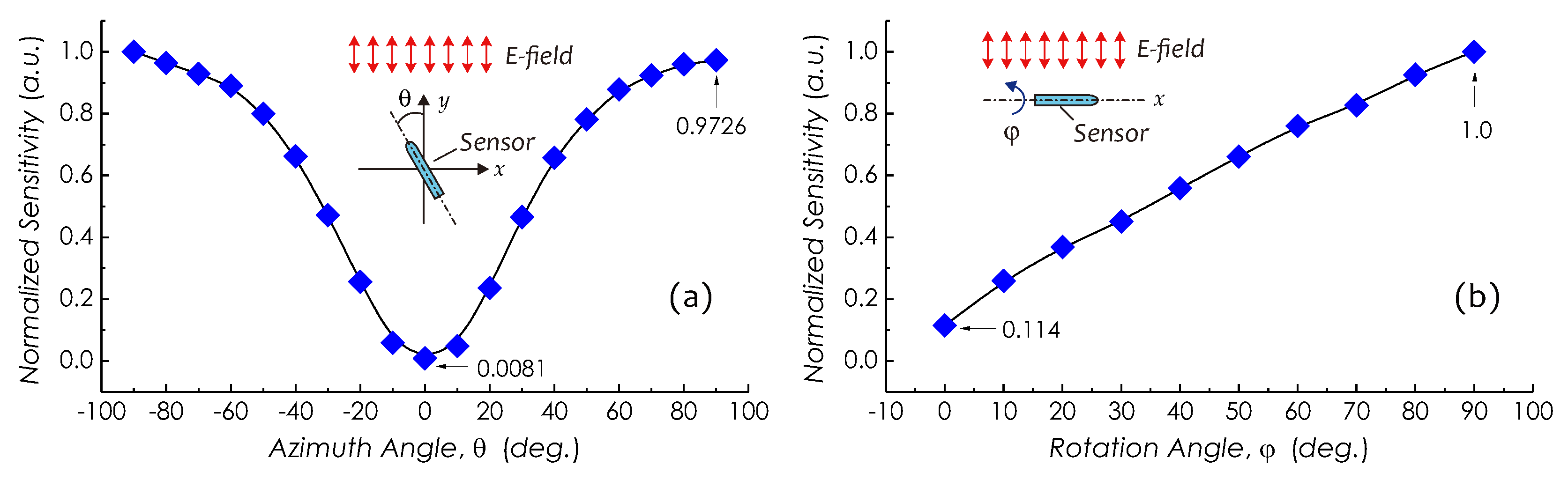
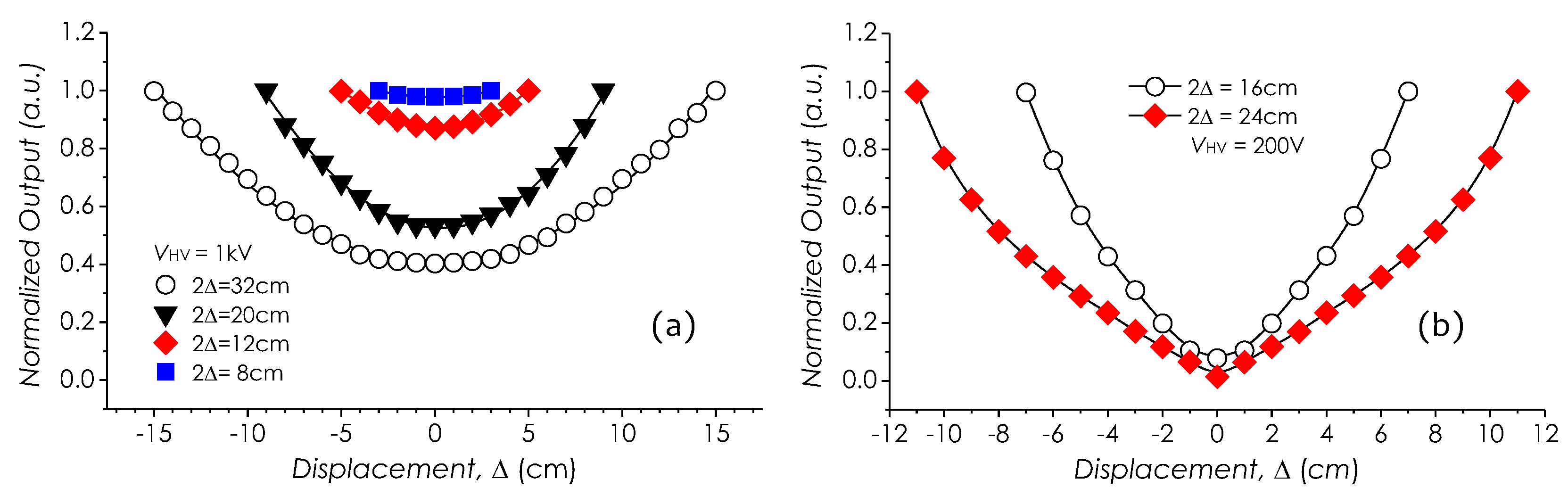
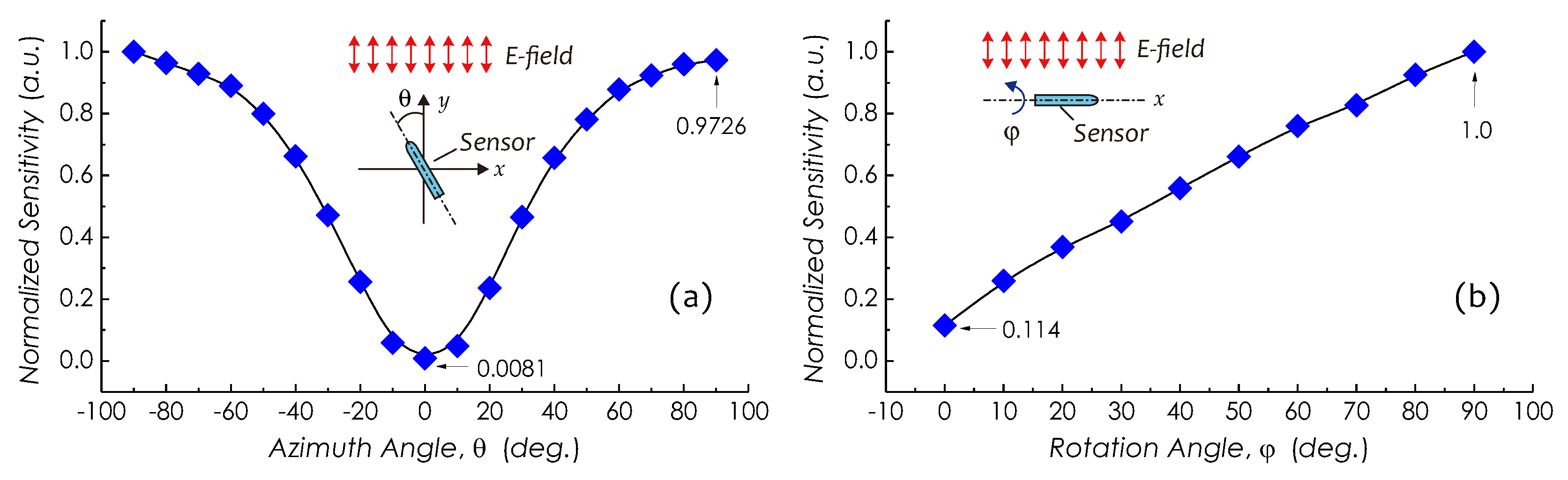
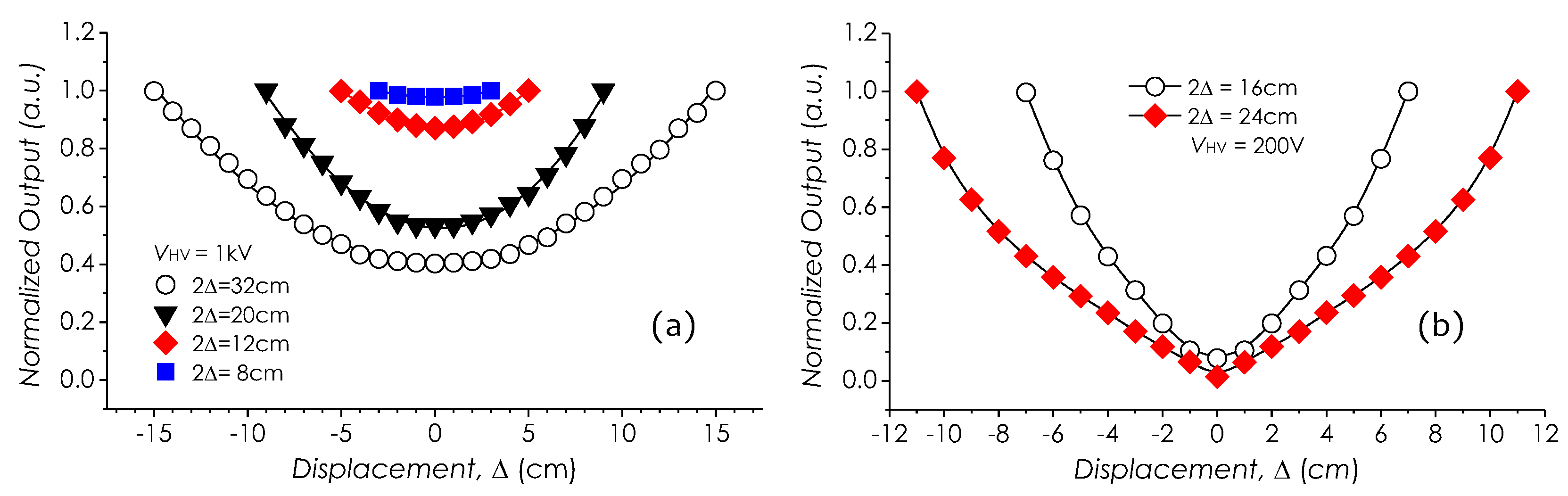
4.4. Directionalities of Sensor
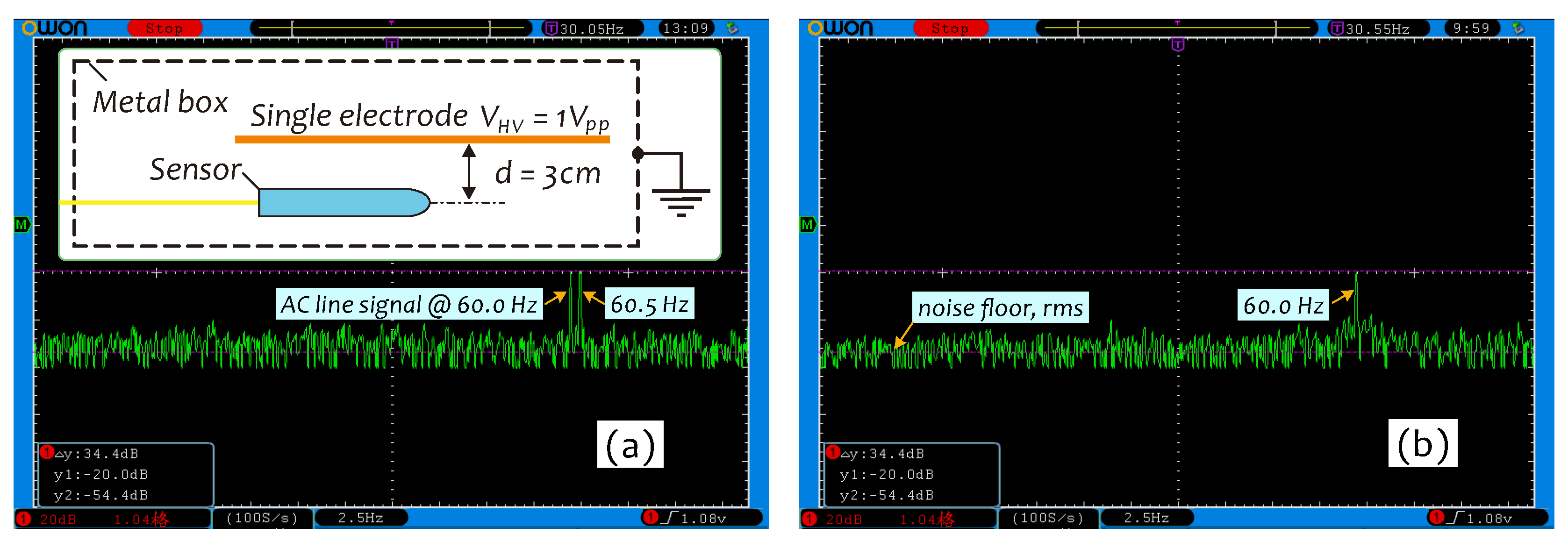
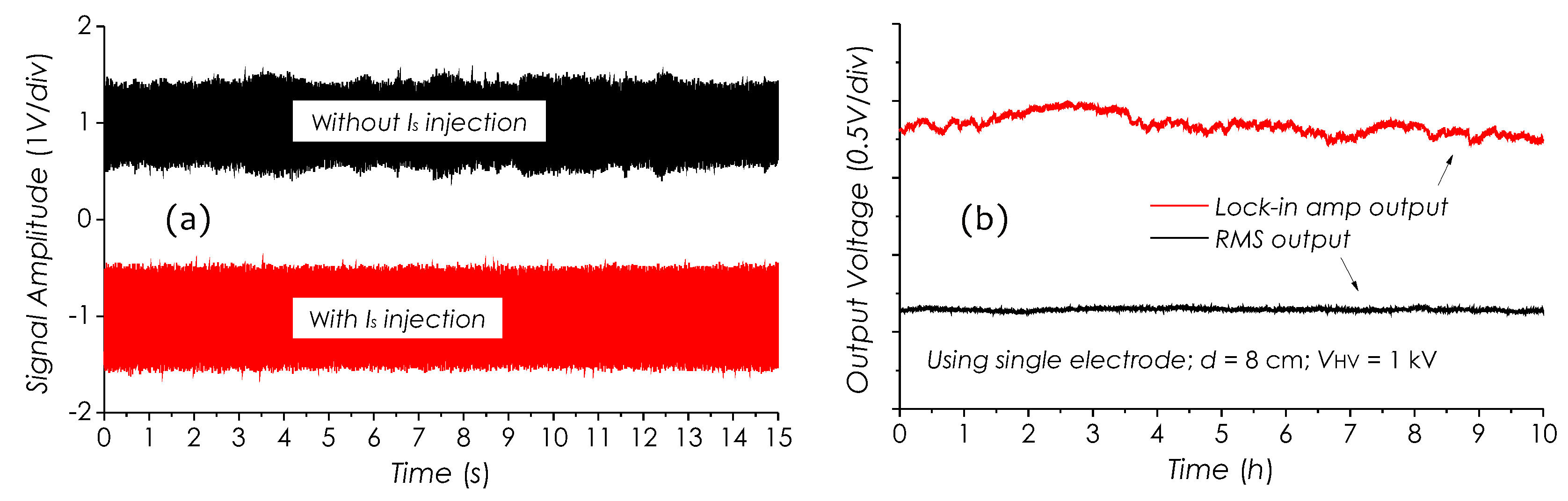
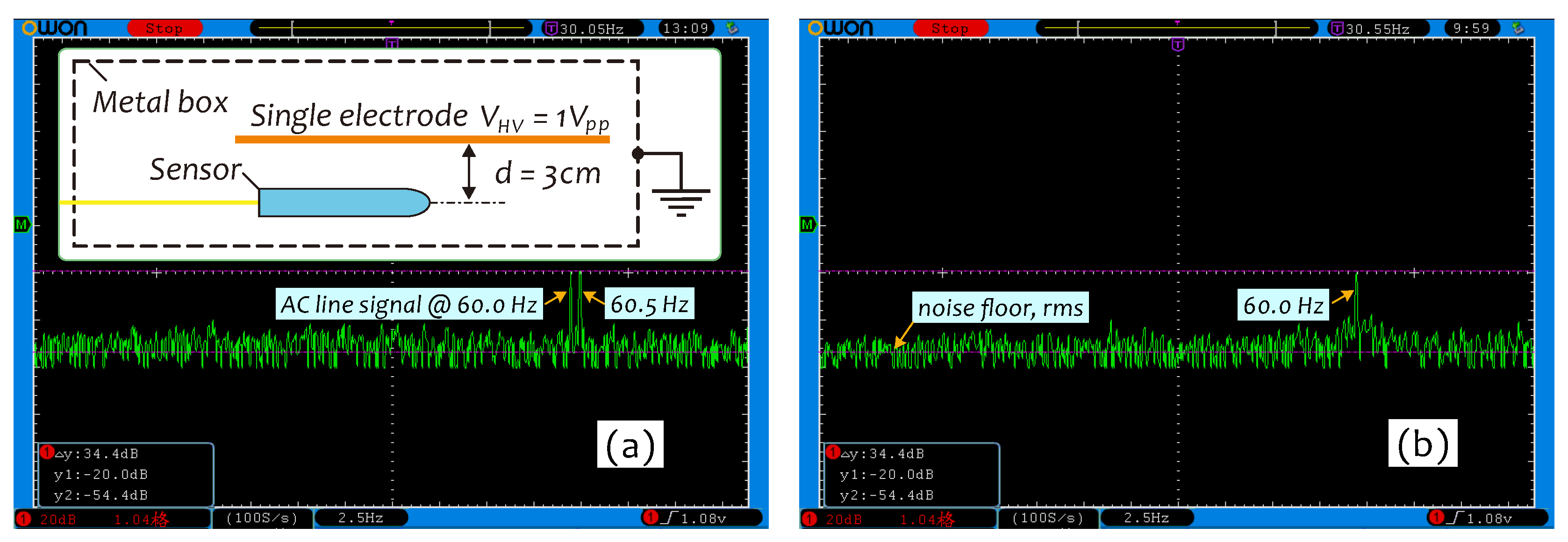
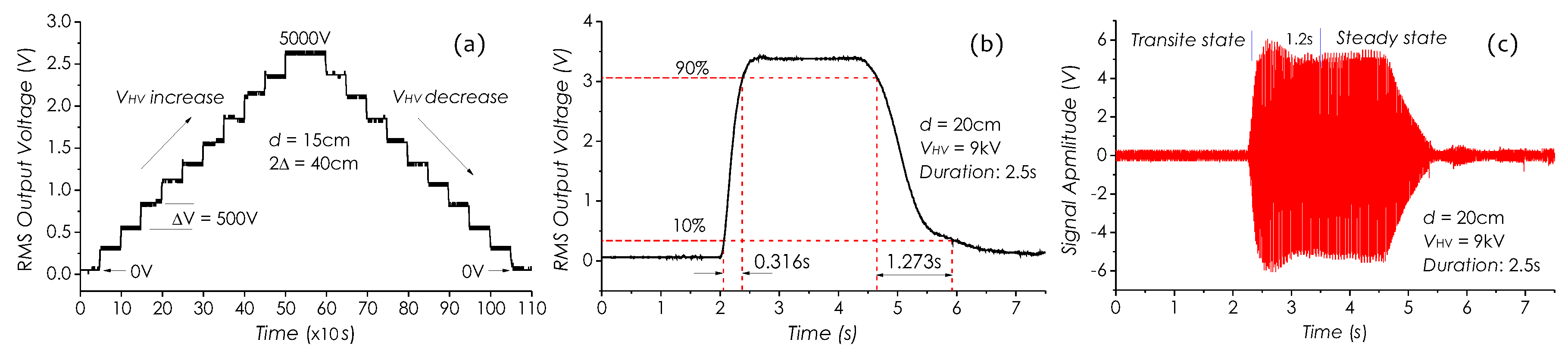
4.5. System Stability Test
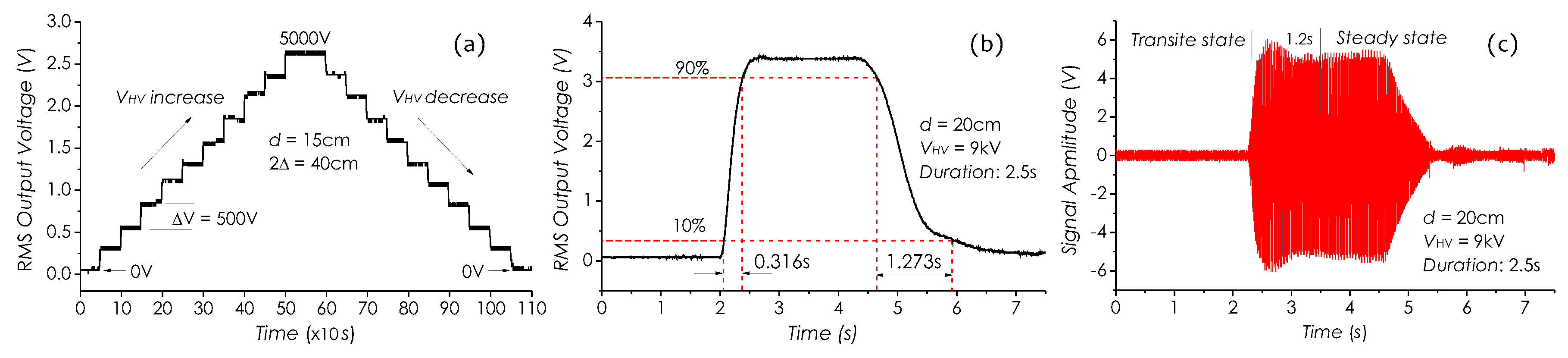
4.6. Dynamic Responses of System
4.7. Durability of Sensor
5. Applications of Sensor
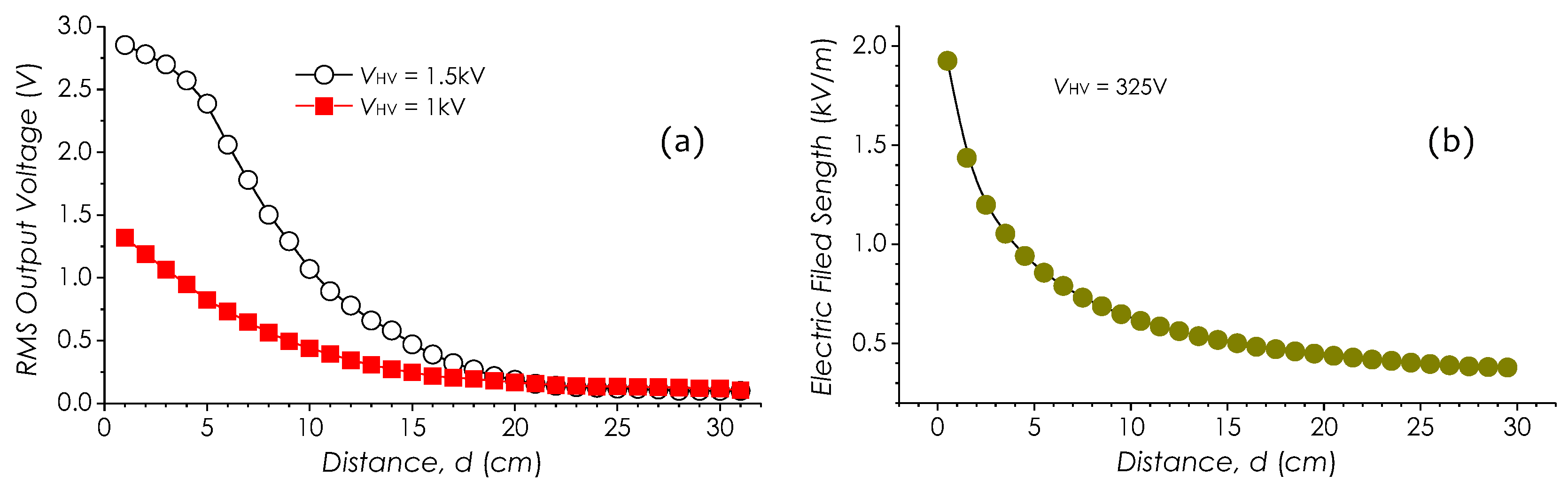
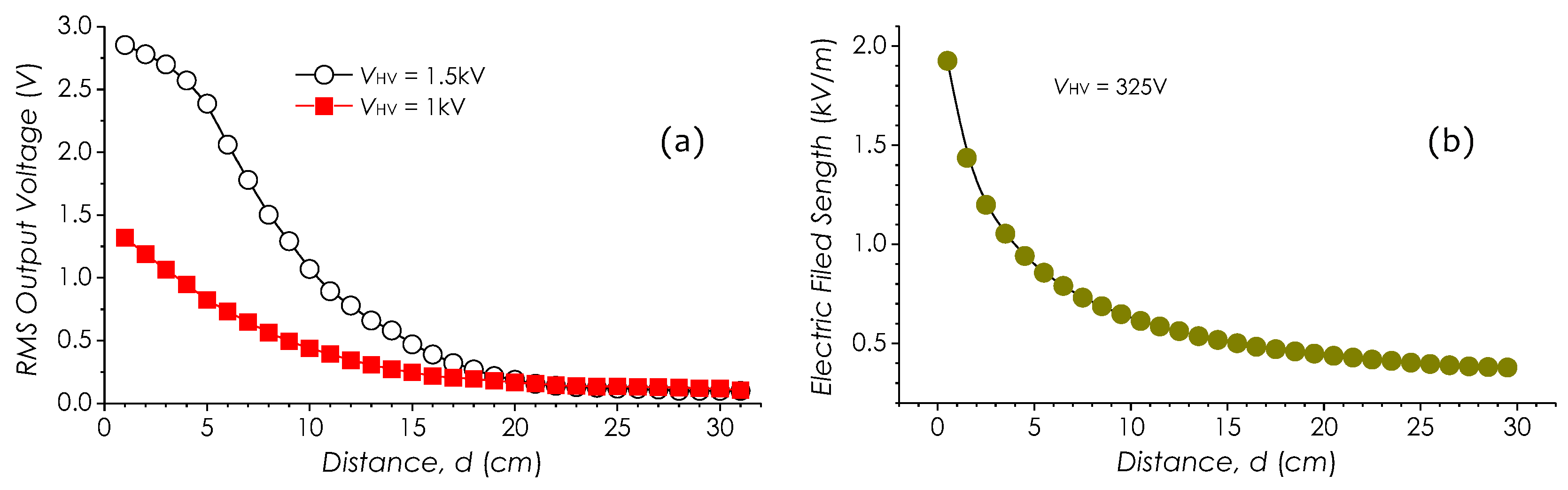
5.1. Measurements of Field Strength Distribution
5.2. Application for Electric Discharge Sensing
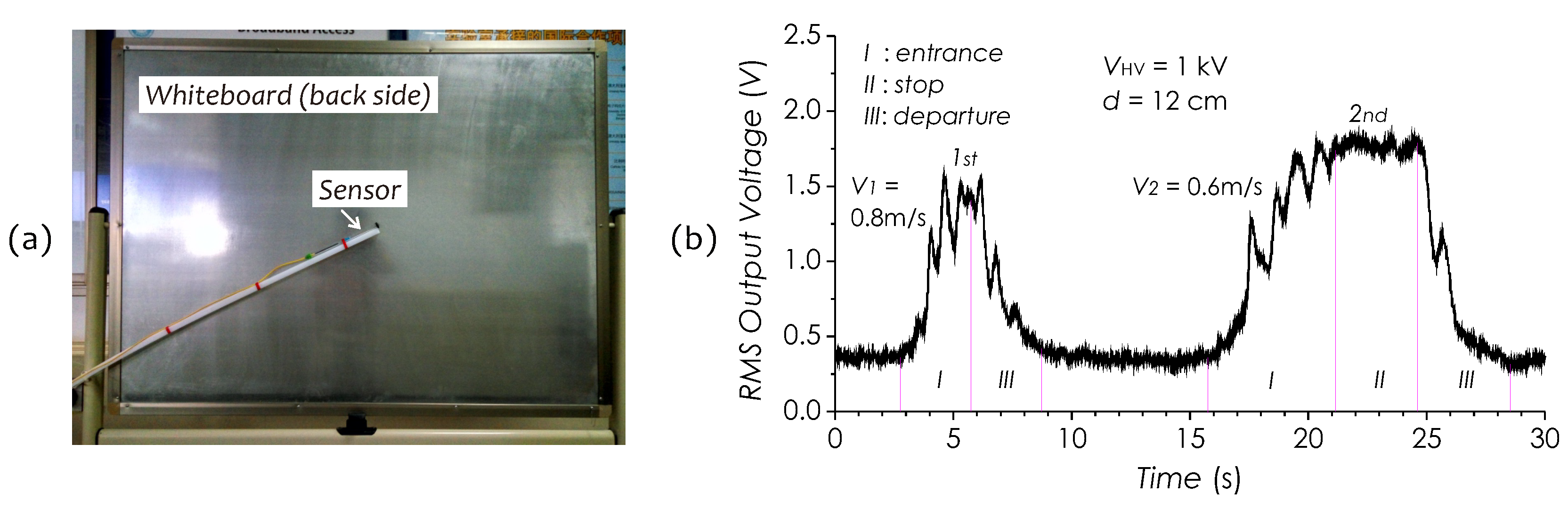
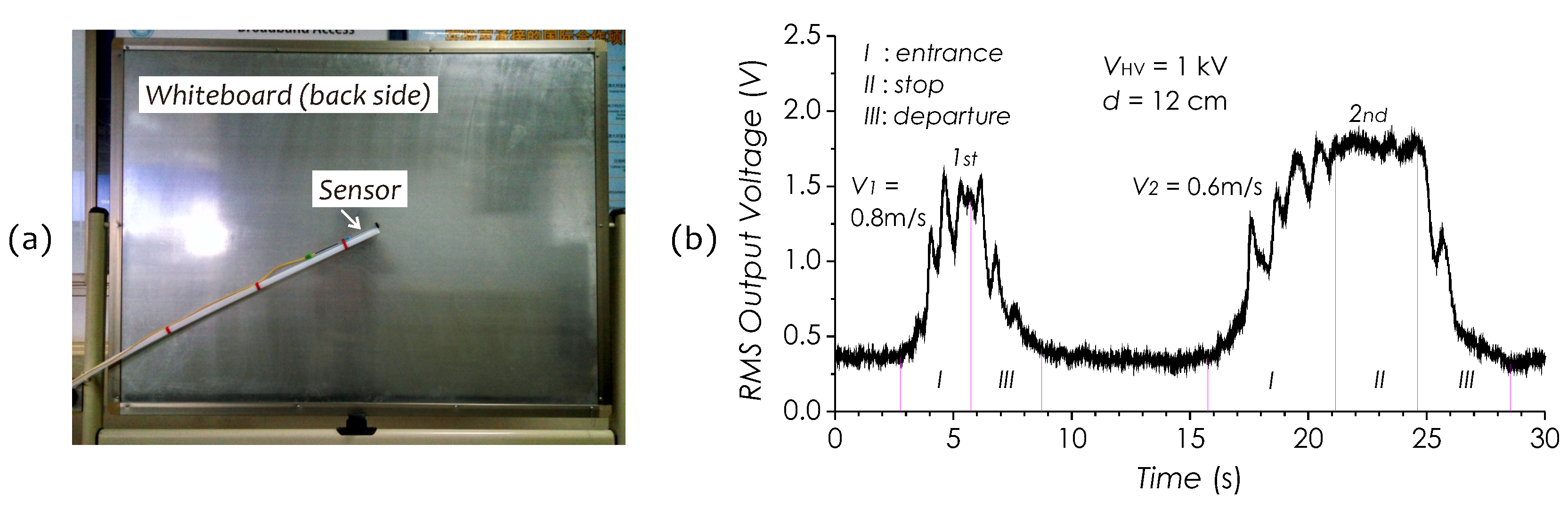
5.3. Application for Human Presence Sensing
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| HV | high voltage |
| E-field | electric field |
| EMI | electromagnetic interference |
| EO | electro-optic |
| PMF | polarization maintaining fiber |
| MEMS | micro electro mechanical systems |
| FP | Fabry–Perot |
| PI | Polyimide |
| FBG | fiber Bragg grating |
| TEC | thermoelectric cooler |
| PEA | pulsed electro-acoustic |
| LIPP | laser induced pressure propagation |
| DFB | distributed feedback |
| LPF | low-pass filter |
| Amp | amplifier |
| RMS | root means square |
| FFT | fast fourier transform |
| AWG | arbitrary waveform generator |
| SNR | signal-to-noise ratio |
References
- Ekberg, M.; Gustafsson, A.; Leijon, M.; Bengtsson, l.; Eriksson, T.; Tornkvist, C.; Johansson, K.; Ming, L. Recent results in HV measurement techniques. IEEE Trans. Dielectr. Electr. Insul. 1995, 2, 906–914. [Google Scholar] [CrossRef]
- Rahmatian, F.; Chavez, P.P.; Jaeger, N.A.F. 230 kV optical voltage transducers using multiple electric field sensors. IEEE Trans. Power Deliv. 2002, 17, 417–422. [Google Scholar] [CrossRef]
- Huang, S.J.; Erickso, D.C. The potential use of optical sensors for the measurement of electric field distribution. IEEE Trans. Power Deliv. 1989, 4, 1579–1585. [Google Scholar] [CrossRef]
- Brenci, M.; Mencaglia, A.; Mignani, A.G. Fiber-optic sensor for the simultaneous and independent measurement of vibration and temperature in electric generators. Appl. Opt. 1991, 30, 2947–2951. [Google Scholar] [CrossRef]
- Blackburn, T.R.; Phung, B.T.; James, R.E. Optical fibre sensor for partial discharge detection and location in high-voltage power transformer. In Proceedings of the Sixth International Conference on Dielectric Materials, Measurements and Applications, Manchester, UK, 7–10 September 1992; pp. 33–36. [Google Scholar]
- Wang, L.; Fang, N.; Wu, C.; Qin, H.; Huang, Z. A fiber optic PD sensor using a balanced Sagnac interferometer and an EDFA-based DOP tunable fiber ring laser. Sensors 2014, 14, 8398–8422. [Google Scholar] [CrossRef] [PubMed]
- Ohkuma, Y.; Ikeyama, T.; Nogi, Y. Double-sensor method for detection of oscillating electric field. Rev. Sci. Instrum. 2011, 82, 04350. [Google Scholar] [CrossRef] [PubMed]
- Bosselmann, T. Innovative applications of fibre-optic sensors in energy and transportation. In Proceedings of the SPIE 17th International Conference on Optical Fibre Sensors, Bruges, Belgium, 23 May 2005; pp. 188–193. [Google Scholar]
- Zeng, R.; Wang, B.; Niu, B.; Yu, Z. Development and application of integrated optical sensors for intense E-field measurement. Sensors 2012, 12, 1364–1369. [Google Scholar] [CrossRef] [PubMed]
- Martínez-León, L.; Díez, A.; Cruz, J.L.; Andrés, M.V. A frequency-output fiber optic voltage sensor with temperature compensation for power system. Sens. Actuators A 2003, 102, 210–215. [Google Scholar] [CrossRef]
- Grattan, K.T.V.; Sun Dr., T. Fiber optic sensor technology: An overview. Sens. Actuators 2000, 82, 40–61. [Google Scholar] [CrossRef]
- Bohnert, K.M.; Nehring, J. Fiber-optic sensing of electric field components. Appl. Opt. 1988, 27, 4814–4818. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez-Asomoza, J.; GutiCrrez-Martinez, C. Electric field sensing system using a Ti:LiNb03 optical coherence modulator. In Proceedings of the IEEE Instrumentation and Measurement Technology Conference, Budapest, Hungary, 21–23 May 2001; pp. 1705–1708. [Google Scholar]
- Vohra, S.T.; Bucholtz, F.; Kersey, A.D. Fiber-optic dc and low-frequency electric-field sensor. Opt. Lett. 1991, 16, 1445–1447. [Google Scholar] [CrossRef] [PubMed]
- Koo, K.P.; Sigel, G.H., Jr. An electric field sensor utilizing a piezoelectric Polyvinylidene Fluoride (PVF2) film in a single-mode fiber interferometer. IEEE J. Quantum Electron. 1982, QE-18, 670–675. [Google Scholar] [CrossRef]
- Donalds, L.J.; French, W.G.; Mitchell, W.C.; Swinehart, R.M.; Wei, T. Electric field sensitive optical fiber using piezoelectric polymer coating. Electron. Lett. 1982, 18, 327–328. [Google Scholar] [CrossRef]
- Sun, B.; Chen, F.; Chen, K. Integrated optical electric field sensor from 10 kHz to 18 GHz. IEEE Photonics Technol. Lett. 2012, 24, 1106–1108. [Google Scholar] [CrossRef]
- Togo, H.; Moreno-Dominguez, D.; Kukutsu, N. Universal optical electric-field sensor covering frequencies from 10 to 100 GHz. In Proceedings of the 41st European Microwave Conference, Manchester, UK, 10–13 October 2011. [Google Scholar]
- Lee, H.Y.; Lee, T.H.; Shay, W.T.; Lee, C.T. Reflective type segmented electrooptical electric field sensor. Sens. Actuators A 2008, 148, 355–358. [Google Scholar] [CrossRef]
- Johnson, E.K.; Kvavle, J.M.; Selfridge, R.H.; Schultz, S.M.; Forber, R.; Wang, W.; Zang, D.Y. Electric field sensing with a hybrid polymer/glass fiber. Appl. Opt. 2007, 46, 6953–6958. [Google Scholar] [CrossRef]
- Roncin, A.; Shafai, C.; Swatek, D.R. Electric field sensor using electrostatic force deflection of a micro-spring supported membrane. Sens. Actuators A 2005, 123–124, 179–184. [Google Scholar] [CrossRef]
- Priest, T.S.; Scelsi, G.B.; Woolsey, G.A. Optical fiber sensor for electric field and electric charge using low-coherence, Fabry–Perot interferometry. Appl. Opt. 1997, 36, 4505–4508. [Google Scholar] [CrossRef] [PubMed]
- Tazzoli, A.; Barbato, M.; Ritrovato, V.; Meneghesso, G. A comprehensive study of MEMS behavior under EOS/ESD events: Breakdown characterization, dielectric charging, and realistic cures. J. Electrost. 2011, 69, 547–553. [Google Scholar] [CrossRef]
- Wang, L.; Fang, N. All-optical fiber power-frequency electric field sensor using a twin-FBG based fiber-optic accelerometer with charged polyimide. In Proceedings of the Progress in Electromagnetics Research Symposium (PIERS), Toyama, Japan, 1–4 August 2018. [Google Scholar]
- Gerhard, R. A matter of attraction: Electric charges localised on dielectric polymers enable electromechanical transduction. In Proceedings of the IEEE 2014 Annual Report Conference on Electrical Insulation and Dielectric Phenomena, Des Moines, IA, USA, 19–22 October 2014; pp. 1–10. [Google Scholar]
- Das-Gupta, D.K. Dielectric and related molecular processes in polymers. IEEE Trans. Dielectr. Electr. Insul. 2001, 8, 6–14. [Google Scholar] [CrossRef]
- Montanari, G.C.; Morshuis, P.H.F. Space charge phenomenology in polymeric insulating materials. IEEE Trans. Dielectr. Electr. Insul. 2005, 12, 754–767. [Google Scholar] [CrossRef]
- Sessler, G.M. Charge distribution and transport in polymers. IEEE Trans. Dielectr. Electr. Insul. 1997, 4, 614–628. [Google Scholar] [CrossRef]
- Cazaux, J. The electric image effects at dielectric surfaces. IEEE Trans. Dielectr. Electr. Insul. 1996, 3, 75–79. [Google Scholar] [CrossRef]
- Albrecht, V.; Janke, A.; Nemeth, E.; Spange, S.; Schubert, G.; Simon, F. Some aspects of the polymers’ electrostatic charging effects. J. Electrost. 2009, 67, 7–11. [Google Scholar] [CrossRef]
- Raju, G.G. Orientational polarization. Chapter 2 Polarization and Static Dielectric Constant. In Dielectrics in Electric Fields; Marcel Dekker, Inc.: New York, NY, USA, 2003; ISBN 0-8247-0864-4. [Google Scholar]
- Brochu, P.; Pei, Q. Dielectric Elastomers for Actuators and Artificial Muscle. In Electroactivity in Polymeric Materials; Springer: New York, NY, USA; Heidelberg, Germany; Dordrecht, The Netherlands; London, UK, 2012. [Google Scholar] [CrossRef]
- Takada, T. Acoustic and optical methods for measuring electric charge distributions in dielectrics. IEEE Trans. Dielectr. Electr. Insul. 1999, 6, 519–547. [Google Scholar] [CrossRef]
- Marty-Dessus, D.; Ziani, A.C.; Petre, A.; Berquez, L. Space charge distributions in insulating polymers: A new non-contacting way of measurement. Rev. Sci. Instrum. 2015, 86, 043905. [Google Scholar] [CrossRef] [PubMed]
- Fleming, R.J. Space charge profile measurement techniques: recent advances and future directions. IEEE Trans. Dielectr. Electr. Insul. 2005, 12, 967–978. [Google Scholar] [CrossRef]
- Mauanti, G.; Montanari, G.C. A space-charge based method for the estimation of apparent mobility and trap depth as markers for insulation degradation-theoretical basis and experimental validation. IEEE Trans. Dielectr. Electr. Insul. 2003, 10, 187–197. [Google Scholar]
- Oberg, E.; Jones, F.D.; Horton, H.L.; Ryffel, H.H. Beams, Section Mechanics and Strength of Materials. In Machinery’s Handbook 28th Edition; Industrial Press Inc.: New York, NY, USA, 2008. [Google Scholar]
- Case, J.; Chilver, L.; Ross, C.T.F. Beams of Two Materials. In Strength of Materials and Structure, 4th ed.; Arnold, A Member of the Hodder Headline Group, 1999; Available online: https://www.sciencedirect.com/science/article/pii/B9780340719206500157 (accessed on 24 March 2019).
- Beards, C.F. The Vibration of Structures with One Degree of Freedom. In Structural Vibration: Analysis and Damping; Butterworth-Heinemann: Oxford, UK, 1996; Available online: http://www.sciencedirect.com/science/article/pii/B9780340645802500041 (accessed on 24 March 2019).
- Beards, C.F. Damping in Structures. In Structural Vibration: Analysis and Damping; Butterworth-Heinemann: Oxford, UK, 1996; Available online: https://www.sciencedirect.com/science/article/pii/B9780340645802500077 (accessed on 24 March 2019).
- Hearn, E.J. Bending of Beams with Initial Curvature, Chapter 12 Miscellaneous Topics. In Mechanics of Materials 2, 3th ed.; Butterworth-Heinemann, Linacre House: Jordan Hill, Oxford, UK, 1997; pp. 509–515. ISBN 0750632666. [Google Scholar]
- Hill, K.O.; Meltz, G. Fiber Bragg grating technology fundamentals and overview. J. Lightwave Technol. 1997, 15, 1263–1276. [Google Scholar] [CrossRef]
- Miridonov, S.V.; Shlyagin, M.G.; Tentori, D. Twin-grating fiber optic sensor demodulation. Opt. Commun. 2001, 191, 253–262. [Google Scholar] [CrossRef]
- Hosier, I.L.; Praeger, M.; Holt, A.F.; Vaughan, A.S.; Swingler, S.G. Effect of water absorption on dielectric properties of nano-silica/polyethylene composites. In Proceedings of the 2014 Annual Report Conference on Electrical Insulation and Dielectric Phenomena, Des Moines, IA, USA, 19–22 October 2014; pp. 651–654. [Google Scholar]
- Toney, J.E.; Tarditi, A.G.; Pontius, P.; Pollick, A.; Sriram, S.; Kingsley, S.A. Detection of energized structure with an electro-optic electric field sensor. IEEE Sens. J. 2014, 14, 1364–1369. [Google Scholar] [CrossRef]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Fang, N. Power-Frequency Electric Field Sensing Utilizing a Twin-FBG Fabry–Perot Interferometer and Polyimide Tubing with Space Charge as Field Sensing Element. Sensors 2019, 19, 1456. https://doi.org/10.3390/s19061456
Wang L, Fang N. Power-Frequency Electric Field Sensing Utilizing a Twin-FBG Fabry–Perot Interferometer and Polyimide Tubing with Space Charge as Field Sensing Element. Sensors. 2019; 19(6):1456. https://doi.org/10.3390/s19061456
Chicago/Turabian StyleWang, Lutang, and Nian Fang. 2019. "Power-Frequency Electric Field Sensing Utilizing a Twin-FBG Fabry–Perot Interferometer and Polyimide Tubing with Space Charge as Field Sensing Element" Sensors 19, no. 6: 1456. https://doi.org/10.3390/s19061456
APA StyleWang, L., & Fang, N. (2019). Power-Frequency Electric Field Sensing Utilizing a Twin-FBG Fabry–Perot Interferometer and Polyimide Tubing with Space Charge as Field Sensing Element. Sensors, 19(6), 1456. https://doi.org/10.3390/s19061456