A Two-Stage Kalman Filter-Based Carrier Tracking Loop for Weak GNSS Signals

Abstract
:1. Introduction
2. Signal Model
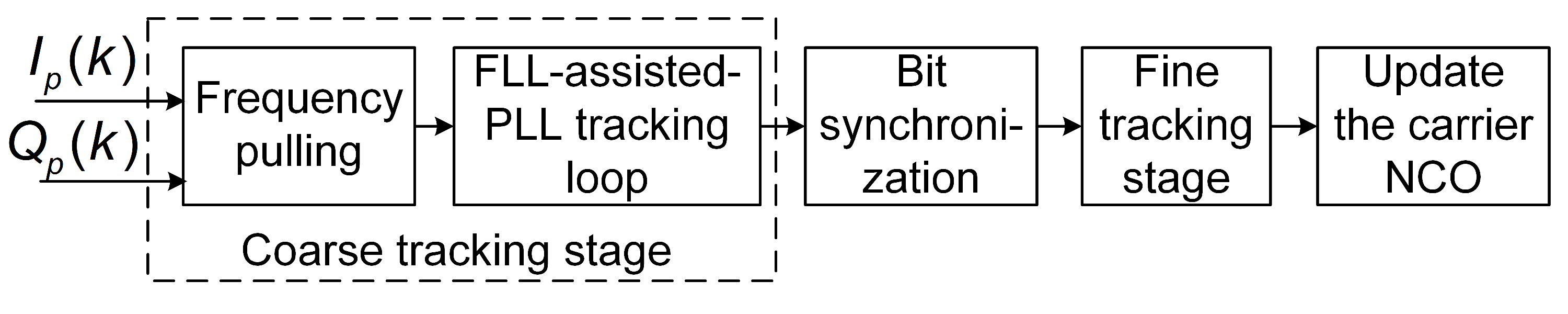
3. Conventional Two-Stage Carrier Tracking Strategy
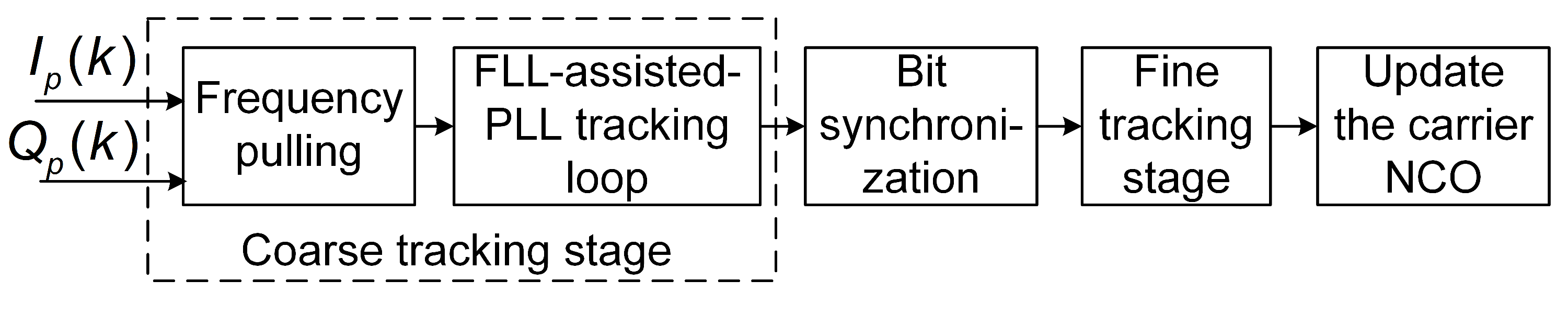
3.1. Coarse Tracking Design
3.1.1. Frequency Pulling Algorithm
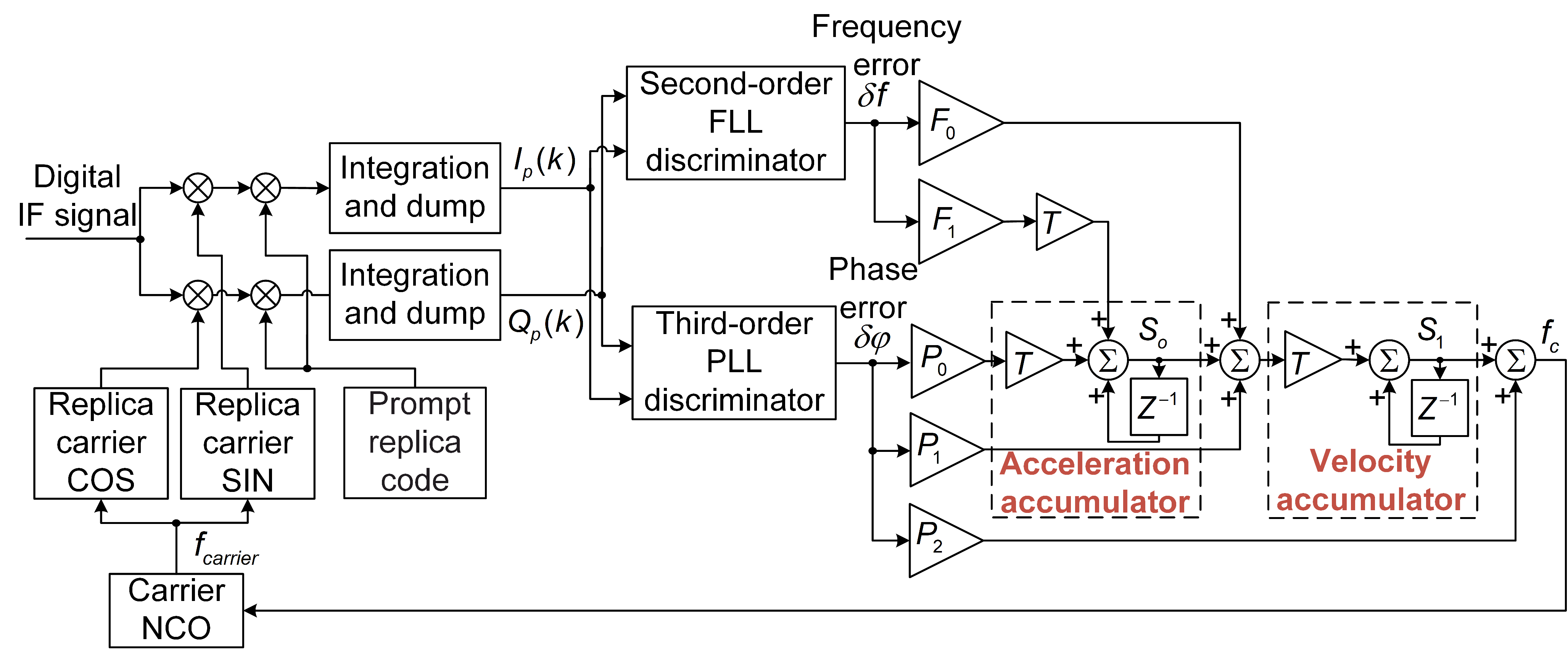
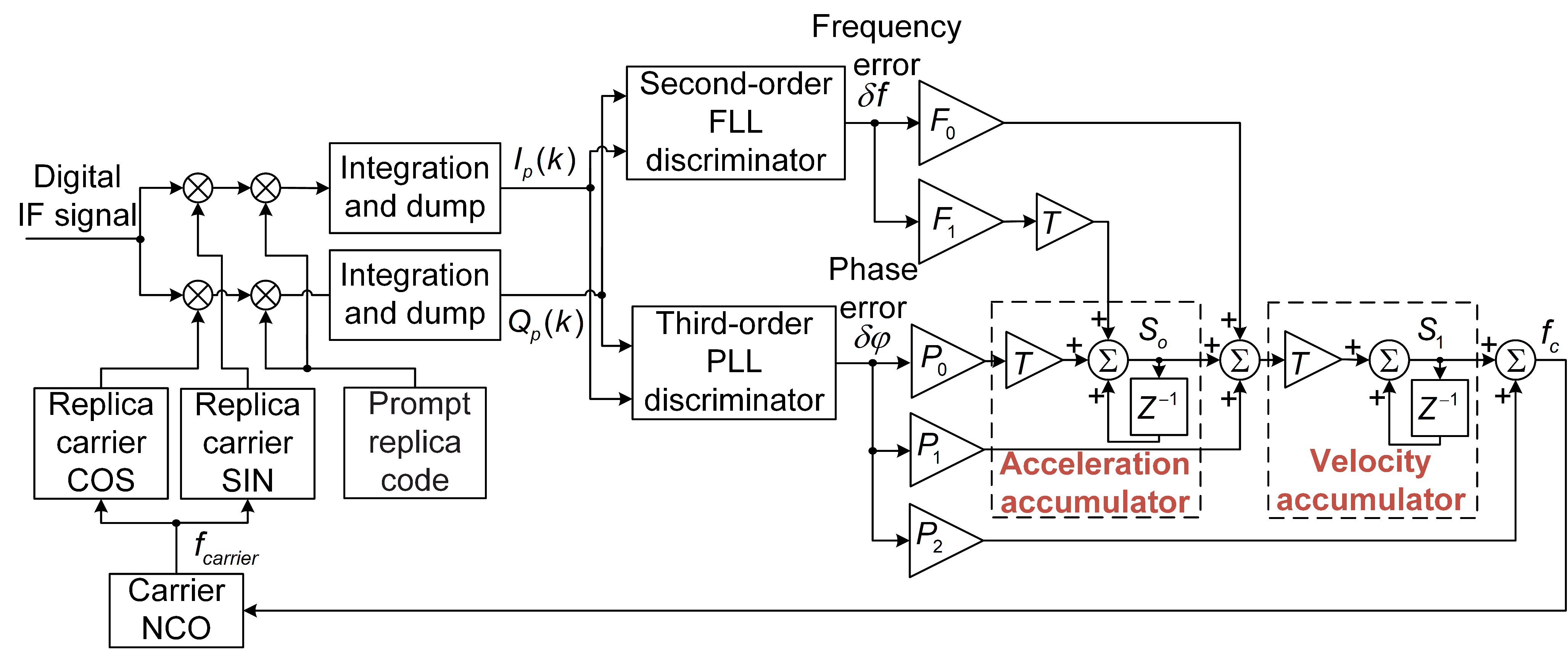
3.1.2. FLL-Assisted-PLL Tracking Loop Design
3.2. Fine Tracking Design
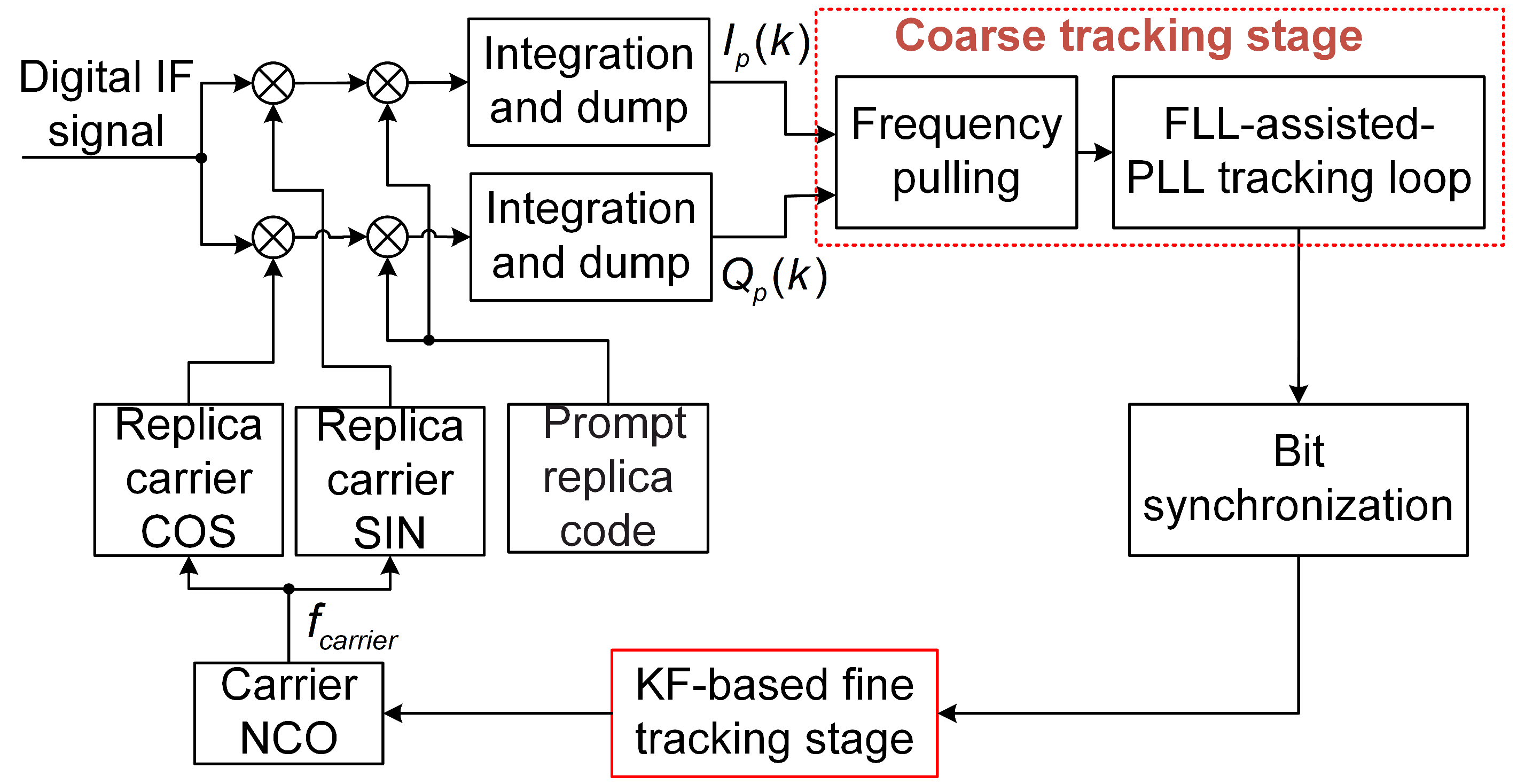
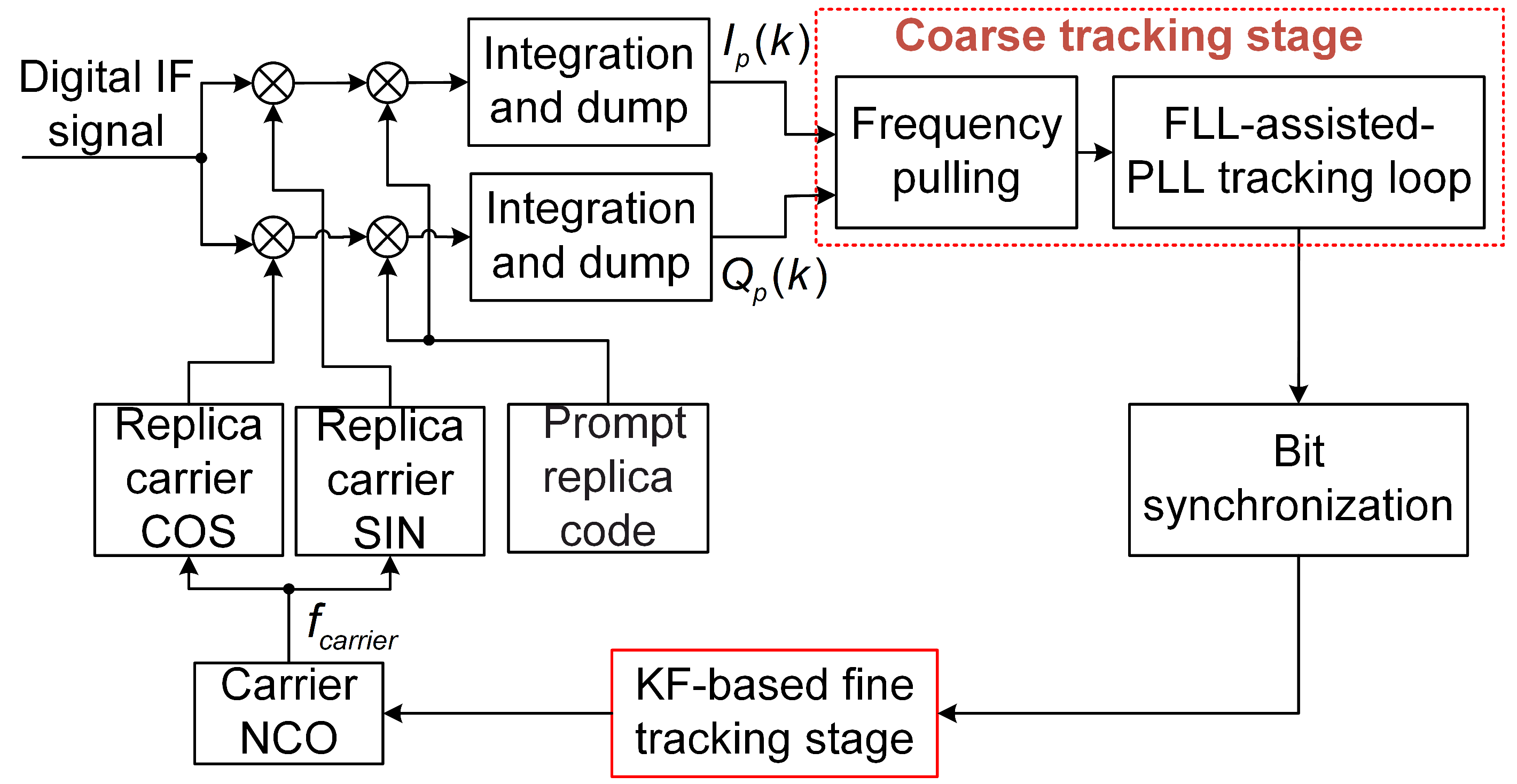
4. KF-Based Two-Stage Carrier Tracking Loop
4.1. Basic Equations of KF-Based Tracking
4.2. KF-Based Coarse-to-Fine Carrier Tracking Algorithm
- (1)
- Initialization. Initialize the bandwidths and coefficients of the PLL and FLL for the coarse tracking stage. Set , , and the coefficients of the second-order FLL and third-order PLL for the FLL-assisted-PLL tracking loop.
- (2)
- The first step of the coarse tracking: Frequency pulling. First, set the integration time, = 1 ms, to ensure fast convergence to the steady state and read out the correlator outputs of the prompt branch. Then, calculate the phase error, , from the four-quadrant arctangent discriminator every 1 ms. To eliminate the outliers of the frequency error, , save 20 frequency errors and use the maximum likelihood estimator in (7) to obtain the frequency residual, . Finally, use the frequency error to update the carrier NCO.
- (3)
- The second step of the coarse tracking: The FLL-assisted-PLL tracking loop. When the frequency pulling algorithm has finished, the tracking stage switches to the FLL-assisted-PLL tracking loop. First, in the second-order FLL, the integration time, , is set to . Next, the cross-product discriminator is used to obtain the frequency error, , every . Then, in the third-order PLL, the two-quadrant arctangent discriminator is utilized to obtain the phase error, , every . Finally, update the tracking loop via (8).
- (4)
- Bit synchronization. If > 1000 ms, bit synchronization is employed. denotes the number of times that the tracking procedure enters the coarse tracking stage and this typically occurs every 1 ms. 1000 ms represents that 1 bit navigation data has entered the coarse tracking stage. Only when > 1000 ms can the bit synchronization be employed. Once bit synchronization succeeds, the KF-based fine tracking will be implemented; otherwise, coarse tracking will continue.
- (5)
- KF-based fine tracking. After successful bit synchronization, the effect of the navigation data bit transition is wiped off; hence, the integration time can be extended to 20 ms. First, read out the correlator outputs of the prompt branch and initialize the KF parameters: The process noise covariance matrix, ; the measurement noise covariance matrix, ; the state vector, ; and the state error covariance matrix, . According to the previous section, the initiation of depends on (13). The updated period of the KF-based loop, , can be designed according to the estimate. If the estimated is low, the updated period, , can be increased to track weak signals; otherwise, cannot be set too long. The initialization of depends on (16). The initialization of and depends on the coarse tracking results. Then, the two-quadrant arctangent discriminator is performed to obtain the phase errors every , which are used to provide the measurement values, . Finally, use KF recursive equations iteratively to update the carrier phase error and the Doppler frequency. The obtained phase error and Doppler frequency are used to update the carrier NCO.
5. Performance Evaluation
5.1. Static Weak Signal Environment Simulation
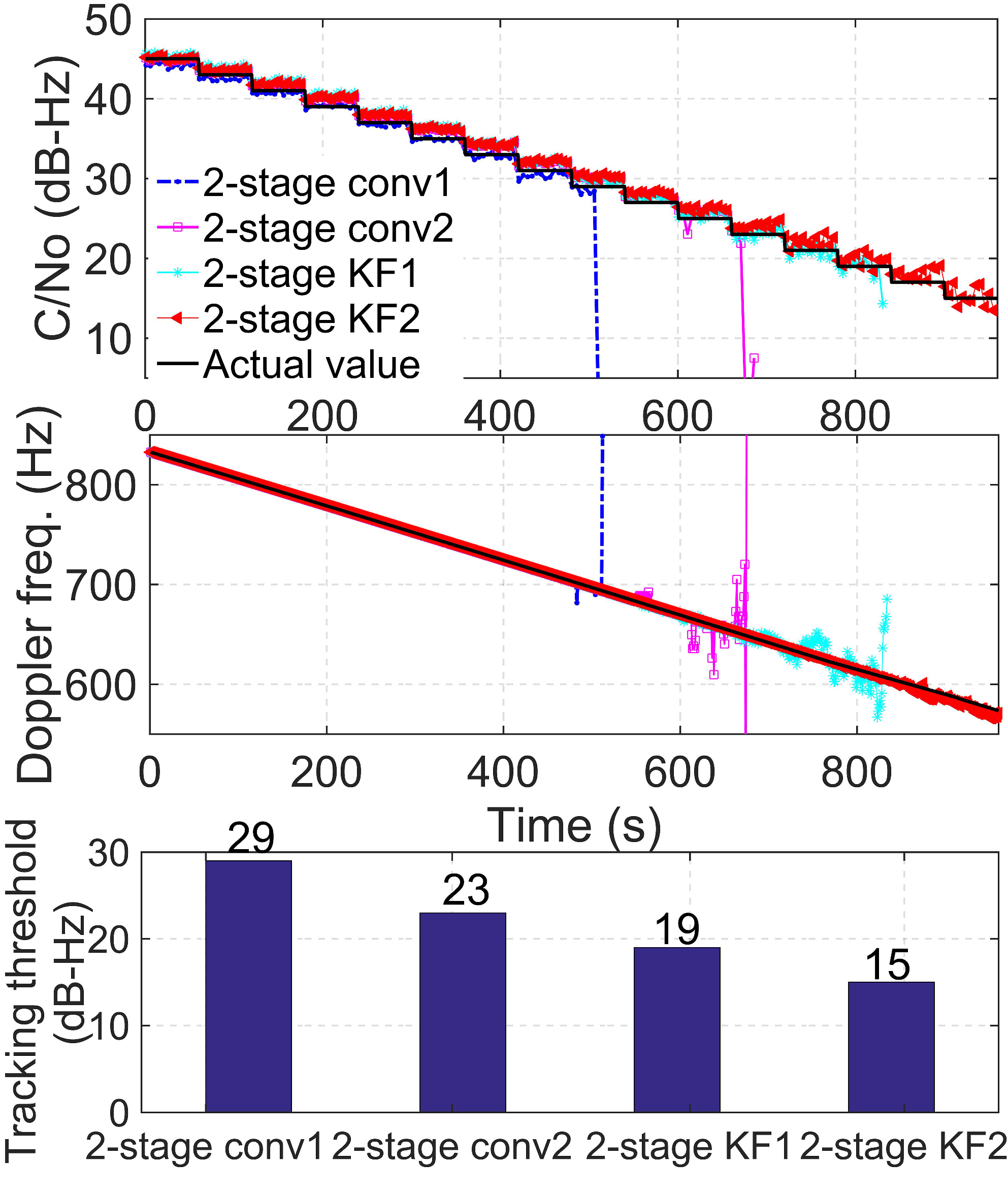
5.1.1. Sensitivity Test and Analysis
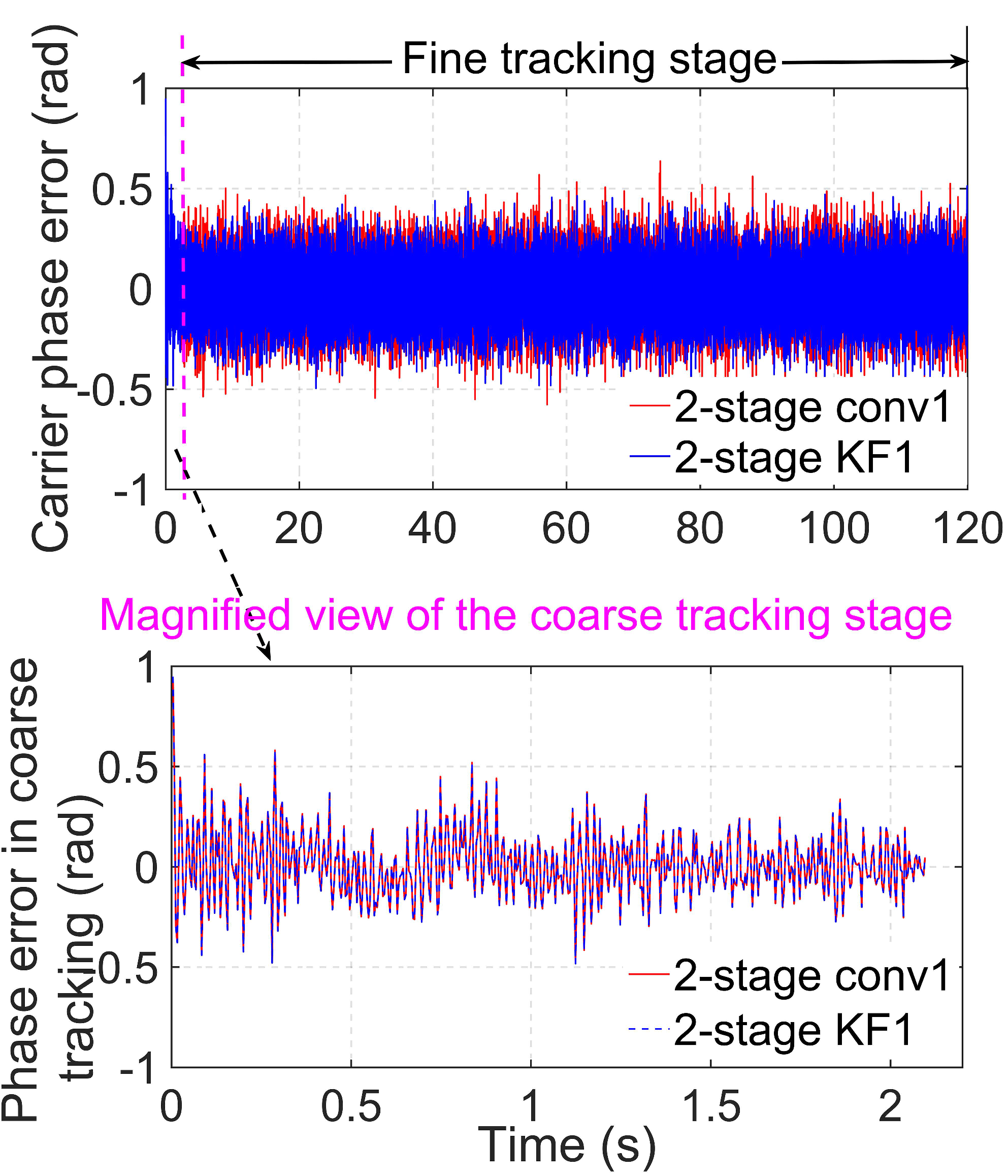
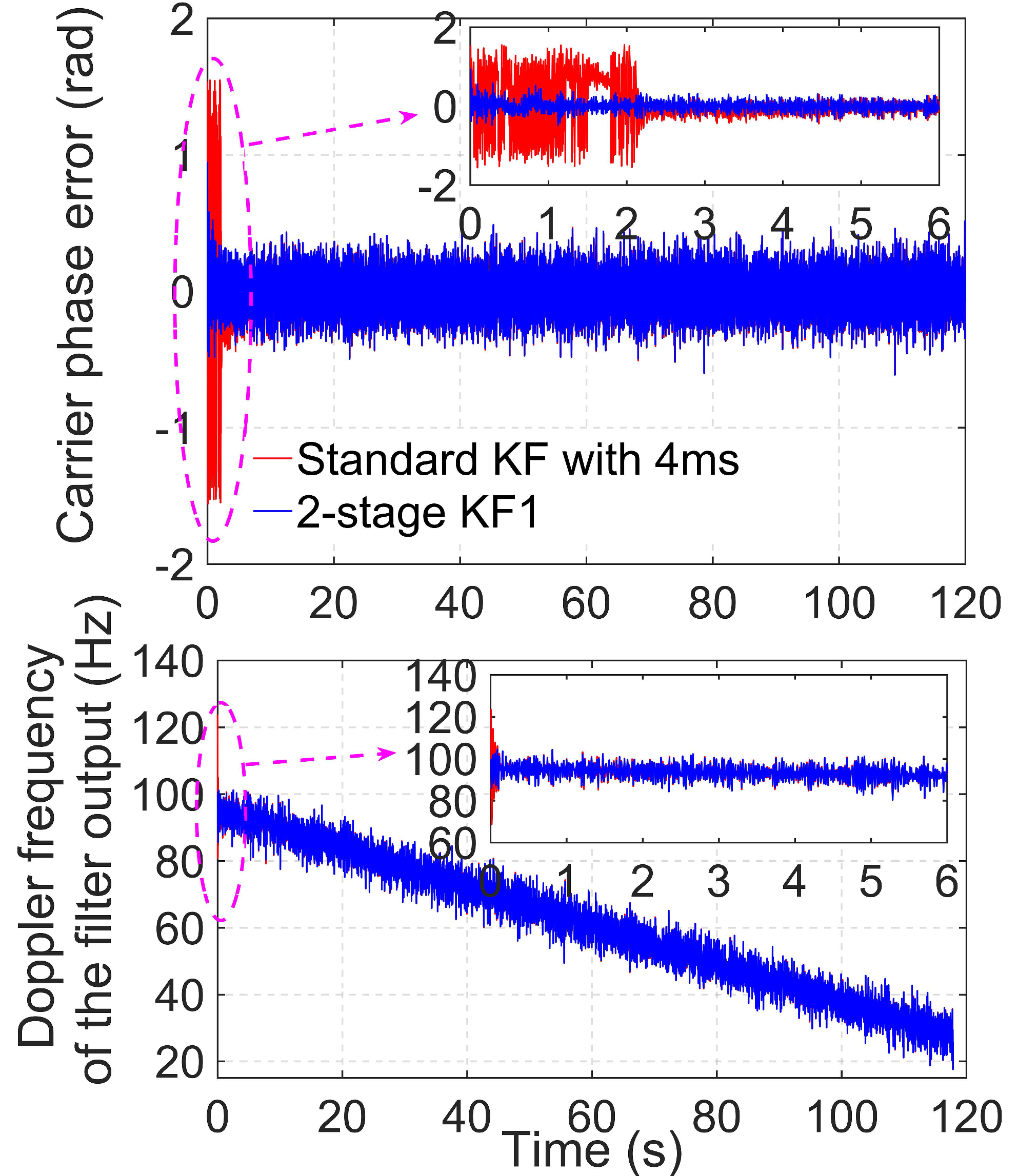
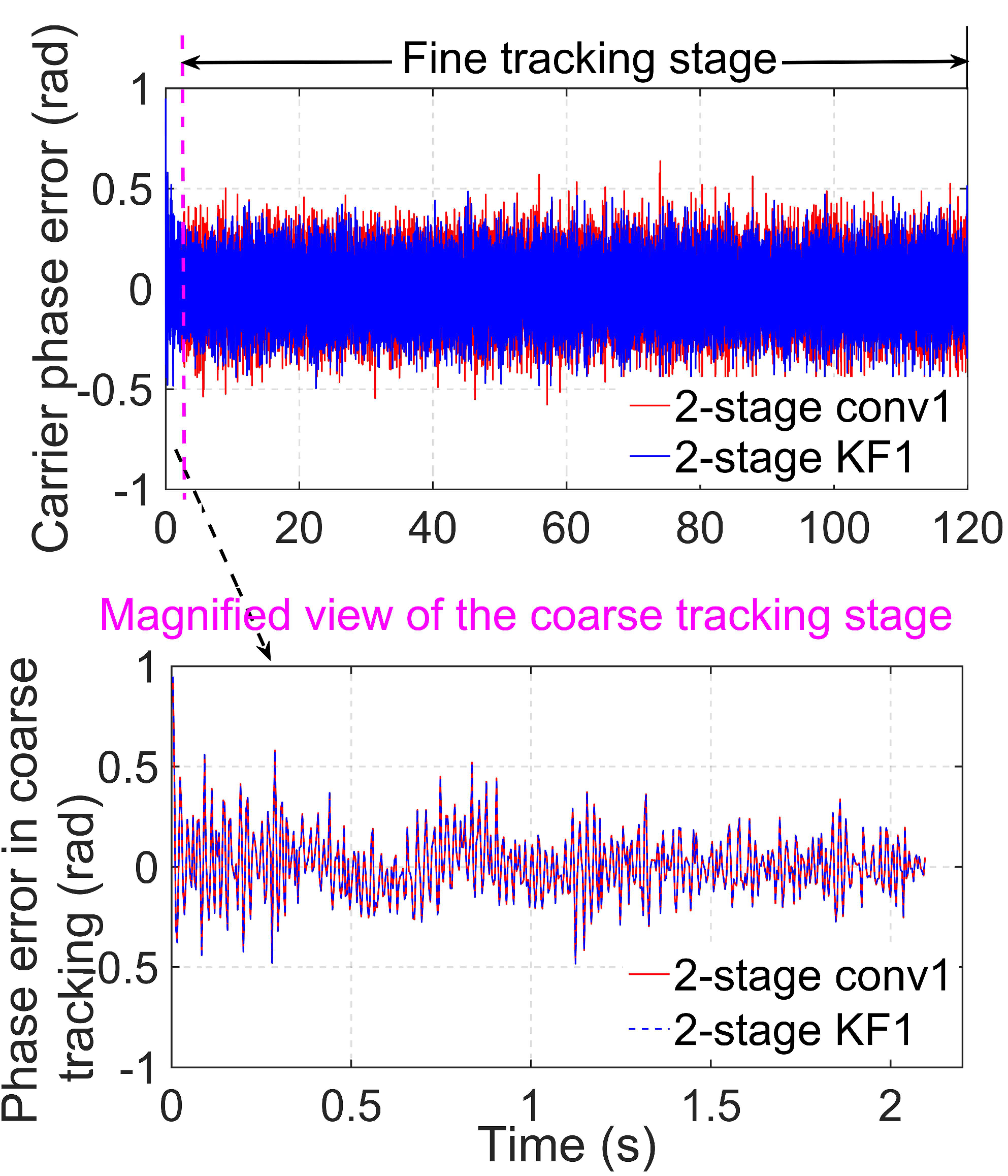
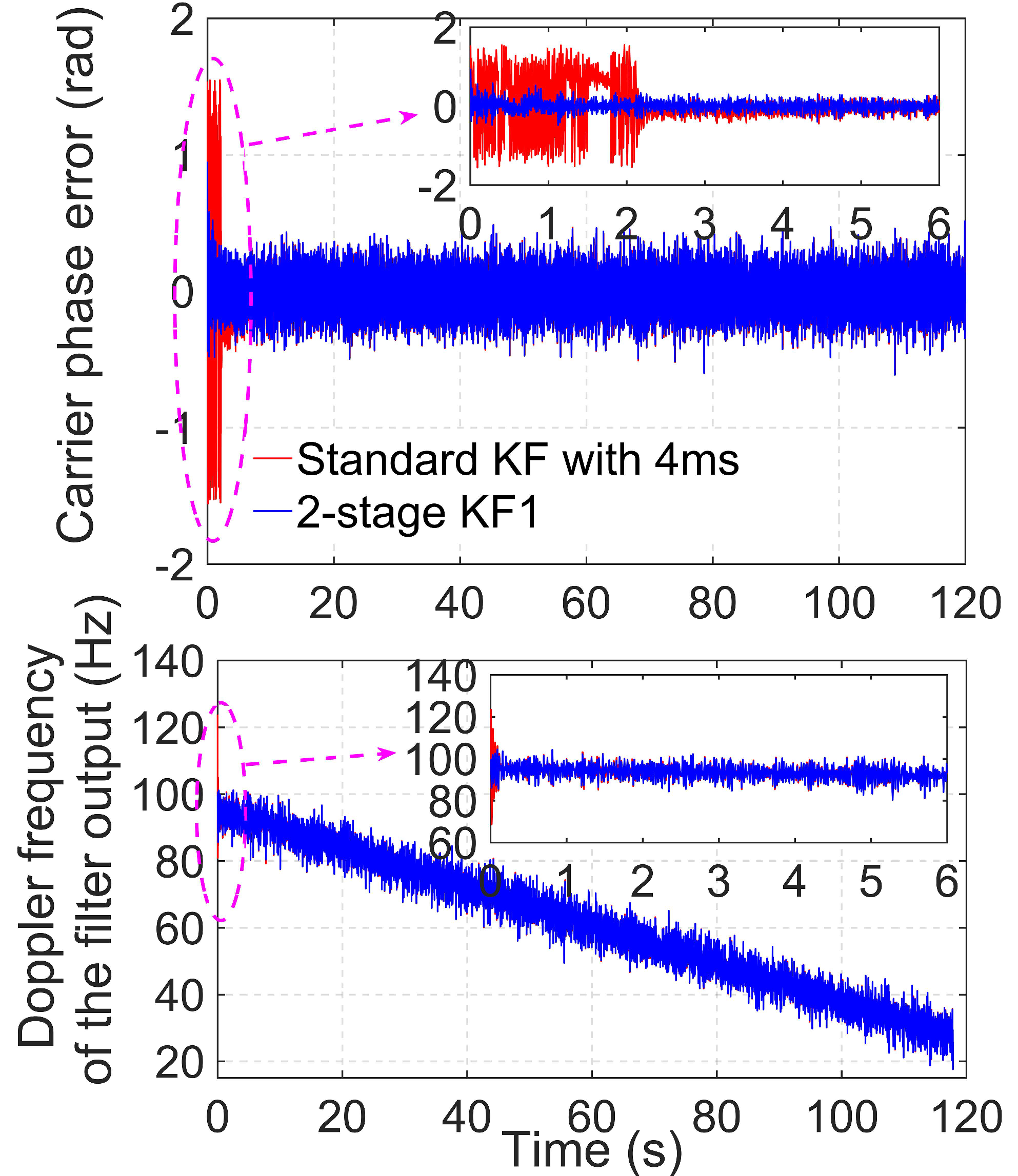
5.1.2. Convergence Speed Test and Analysis
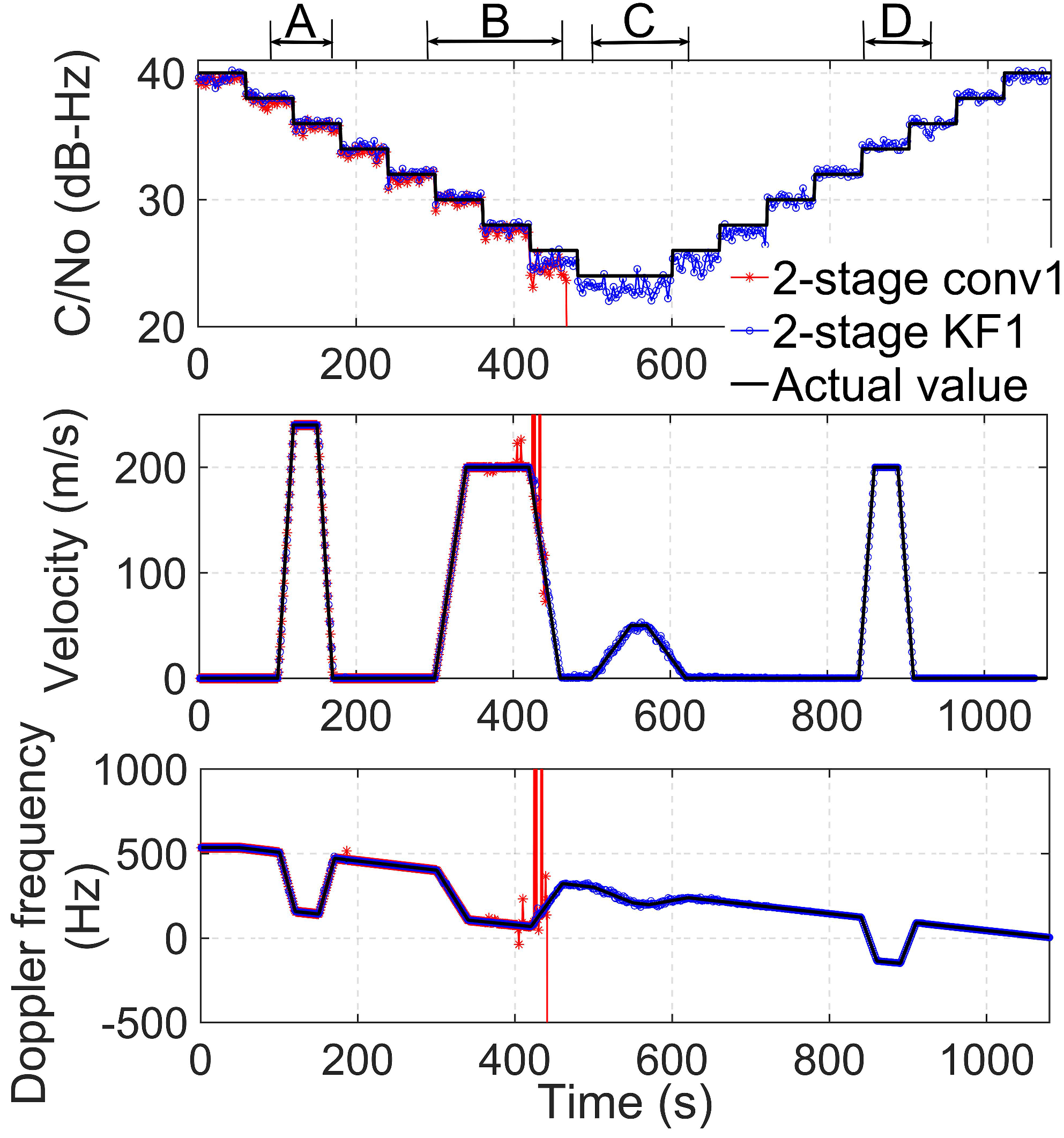
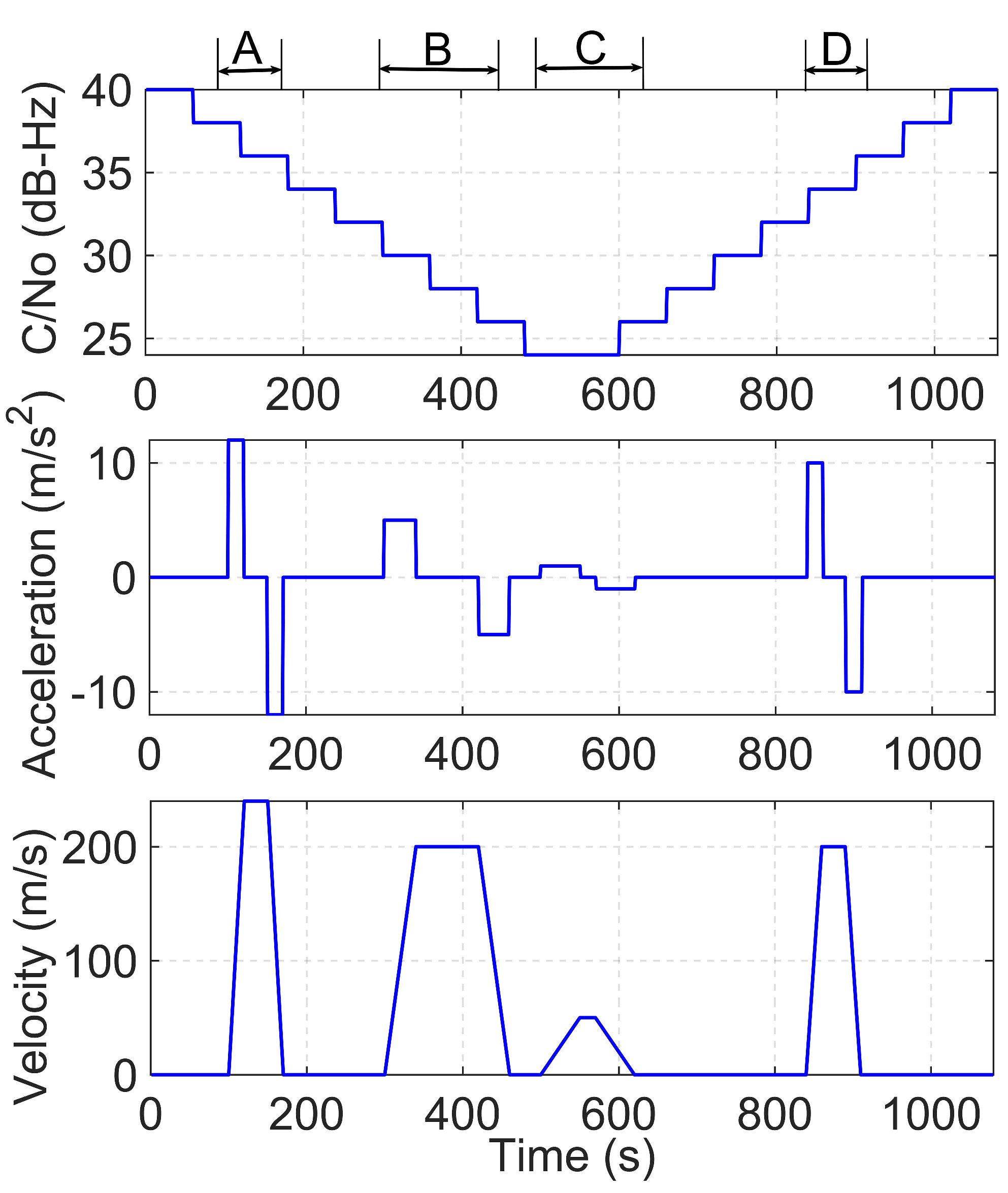
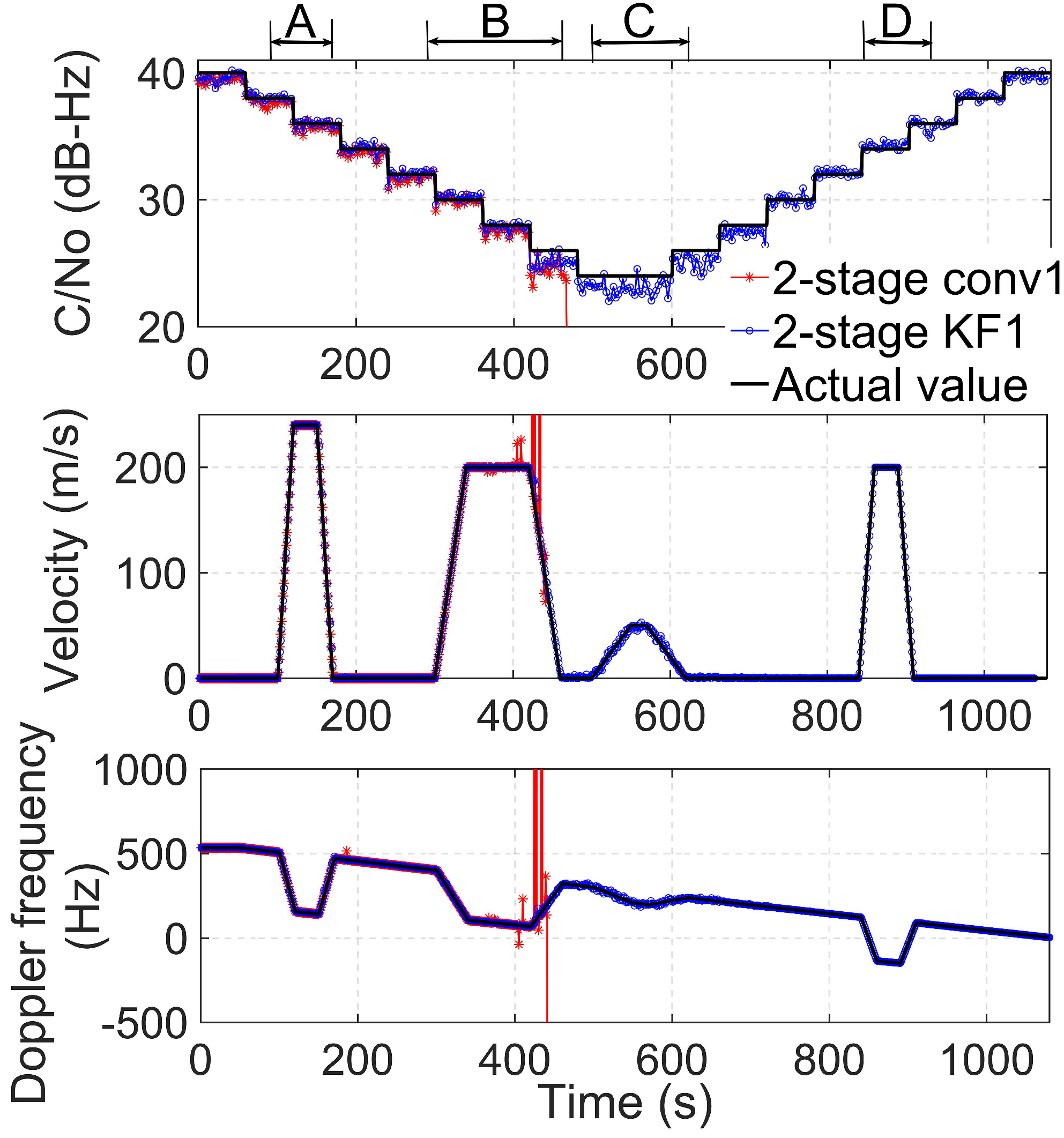
5.2. Dynamic Weak Signal Environment Simulation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kaplan, E.D.; Hegarty, C. Understanding GPS: Principles and Applications; Artech House: London, UK, 2006. [Google Scholar]
- Curran, J.T.; Lachapelle, G.; Murphy, C.C. Improving the design of frequency lock loops for GNSS receivers. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 850–868. [Google Scholar] [CrossRef]
- Ward, P.W. Performance comparisons between FLL, PLL and a novel FLL-assisted-PLL carrier tracking loop under RF interference conditions. In Proceedings of the 11th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1998), Nashville, TN, USA, 15–18 September 1998; pp. 783–795. [Google Scholar]
- Niu, X.; Li, B.; Ziedan, N.; Guo, W.; Liu, J. Analytical and simulation-based comparison between traditional and Kalman filter-based phase-locked loops. GPS Solut. 2017, 21, 123–135. [Google Scholar] [CrossRef]
- Psiaki, M.L.; Jung, H. Extended Kalman filter methods for tracking weak GPS signals. In Proceedings of the ION GPS 2002, Institute of Navigation, Portland, OR, USA, 24–27 September 2002; pp. 2539–2553. [Google Scholar]
- Won, J.H.; Dotterbock, D.; Eissfeller, B. Performance Comparison of Different Forms of Kalman Filter Approaches for Vector-Based GNSS Signal Tracking Loop. Navigation 2010, 57, 185–199. [Google Scholar] [CrossRef]
- Salem, D.R.; O’Driscoll, C.; Lachapelle, G. Methodology for comparing two carrier phase tracking techniques. GPS Solut. 2012, 16, 197–207. [Google Scholar] [CrossRef]
- O’Driscoll, C.; Petovello, M.G.; Lachapelle, G. Choosing the coherent integration time for Kalman filter-based carrier-phase tracking of GNSS signals. GPS Solut. 2011, 15, 345–356. [Google Scholar] [CrossRef]
- Yang, R.; Yu, M.; Ling, K.; Poh, E. Generalized GNSS signal carrier tracking: part II-optimization and implementation. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1798–1811. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, L.; Yan, B.; Zhang, H.; Luo, L. A Carrier Estimation Method Based on MLE and KF for Weak GNSS Signals. Sensors 2017, 17, 1468. [Google Scholar] [CrossRef] [PubMed]
- Kazemi, P. Development of New Filter and Tracking Schemes for Weak GPS Signal Tracking. Ph.D. Thesis, Department of Geomatics Engineering, The University of Calgary, Calgary, AB, Canada, 2010. [Google Scholar]
- Kelley, C. Internet-based open source software for learning about GPS. GPS Solut. 2002, 6, 201–205. [Google Scholar] [CrossRef]
- Won, J.H.; Pany, T.; Eissfeller, B. Characteristics of Kalman filters for GNSS signal tracking loop. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3671–3681. [Google Scholar] [CrossRef]
- Won, J.H. A novel adaptive digital phase-lock-loop for modern digital GNSS receivers. IEEE Commun. Lett. 2014, 18, 46–49. [Google Scholar] [CrossRef]
- Tang, X.; Falco, G.; Falletti, E.; Presti, L.L. Practical implementation and performance assessment of an extended Kalman filter-based signal tracking loop. In Proceedings of the International conference on localization and GNSS (ICL-GNSS), Torino, Italy, 25–27 June 2013; pp. 1–6. [Google Scholar]
- Stephens, S.A.; Thomas, J.B. Controlled-root formulation for digital phase-locked loops. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 78–95. [Google Scholar] [CrossRef]
- Yang, R.; Ling, K.; Poh, E.; Yu, M. Generalized GNSS signal carrier tracking: part I-modeling and analysis. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1781–1797. [Google Scholar] [CrossRef]
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2012; pp. 324–327. [Google Scholar]
- Sharawi, M.S.; Akos, D.M.; Aloi, D.N. GPS C/N0 estimation in the presence of interference and limited quantization levels. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 227–238. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Loop | Discriminator Algorithm |
|---|---|
| Second-order FLL | where , , and denotes the sign function. |
| Third-order PLL | where denotes the two-quadrant arctangent. |
| Algorithms | Tracking Stage | ||||
|---|---|---|---|---|---|
| Coarse Tracking | Fine Tracking | ||||
| CIT (ms) | (Hz) | CIT (ms) | |||
| 2-stage conv1 | 15 | 10 | 4 | 15 | 4 |
| 2-stage conv2 | 5 | 10 | 10 | 5 | 20 |
| 2-stage KF1 | 15 | 10 | 4 | Not applicable | 4 |
| 2-stage KF2 | 5 | 10 | 10 | Not applicable | 20 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Y.; Chang, Q.; Wang, H.; Li, X. A Two-Stage Kalman Filter-Based Carrier Tracking Loop for Weak GNSS Signals. Sensors 2019, 19, 1369. https://doi.org/10.3390/s19061369
Cheng Y, Chang Q, Wang H, Li X. A Two-Stage Kalman Filter-Based Carrier Tracking Loop for Weak GNSS Signals. Sensors. 2019; 19(6):1369. https://doi.org/10.3390/s19061369
Chicago/Turabian StyleCheng, Yan, Qing Chang, Hao Wang, and Xianxu Li. 2019. "A Two-Stage Kalman Filter-Based Carrier Tracking Loop for Weak GNSS Signals" Sensors 19, no. 6: 1369. https://doi.org/10.3390/s19061369
APA StyleCheng, Y., Chang, Q., Wang, H., & Li, X. (2019). A Two-Stage Kalman Filter-Based Carrier Tracking Loop for Weak GNSS Signals. Sensors, 19(6), 1369. https://doi.org/10.3390/s19061369